Изобретение относится к области судостроения, а именно к движительно-двигательному устройству, типа подвесного лодочного мотора, и может быть использовано в водном транспорте для оснащения маломерных плавучих средств легкого и среднего класса с малым водоизмещением как специального, так и общехозяйственного назначения.
Известно движительно-двигательное устройство, содержащее гребной винт, защитный плавник-шпору и руль, установленные на кронштейне за транцем катера, на борту которого установлен двигатель (журнал "Катера и яхты" №4, 1991 год).
Наиболее же близким к предложенному изобретению по технической сущности является патент RU 16491 U1, 10.01.2001, раскрывающий подвесной мотор, содержащий двигатель, гребной винт, привод гребного винта, привод поворота гребного винта и устройство управления, при этом также содержит механизм изменения скорости вращения гребного винта и механизм изменения высоты подвесного мотора, выполненного с возможностью изменения высоты синхронно изменению скорости вращения гребного винта, причем синхронизация обеспечивается качалкой, эксцентриком со штоком, которые приводятся в движение тросиками.
Недостатком данного устройства является сложность конструкции синхронизации и низкая надежность механизма изменения скорости вращения гребного винта и механизма изменения высоты подвесного мотора, большие задержки на команду изменения скорости (необходимо дождаться изменения положения гидроцилиндра), сложность настройки синхронизации и внесения в нее корректировок.
Основной задачей изобретения является устранение указанных недостатков ближайшего аналога.
Техническим результатом является упрощение конструкции синхронизации, повышение надежности механизма изменения скорости вращения гребного винта и механизма изменения высоты подвесного мотора, уменьшение задержек на команду изменения скорости/высоты, упрощение настроек синхронизации и возможность внесения в нее корректировок.
Данный результат достигается конструкцией подвесного лодочного мотора, включающего двигатель, взаимодействующий с механизмом изменения скорости, ведущий вал, расположенный во внутреннем пространстве дейдвуда, связывающий механизм изменения скорости с приводом гребного винта, кронштейн, с одной стороны связанный с дейдвудом, а с другой с подвижной плитой, которая выполнена с возможностью приведения в движение посредством связанного с ней механизма изменения высоты подвесного мотора, при этом механизм изменения скорости и механизм изменения высоты подвесного мотора взаимодействуют между собой синхронно посредством электронного блока управления, для изменения высоты лодочного мотора в зависимости от скорости вращения гребного винта, причем максимальные обороты гребного винта соответствуют максимально верхнему положению механизма изменения высоты и, соответственно максимально верхнему положению подвесного лодочного мотора.
Механизм изменения высоты подвесного мотора выполнен электромеханическим или гидравлическим или пневматическим.
Механизм изменения высоты установлен на опоре неподвижной плиты.
Электронный блок управления выполнен с возможностью корректировки соотношения изменений высоты лодочного мотора в зависимости от скорости вращения гребного винта.
Электронный блок управления дополнительно может включать модуль синхронизации параметров взаимодействия узлов лодочного мотора.
Перемещение механизма изменения высоты подвесного мотора осуществляется ступенчато (пошагово), при достижении гребным винтом соответствующих скоростей вращения.
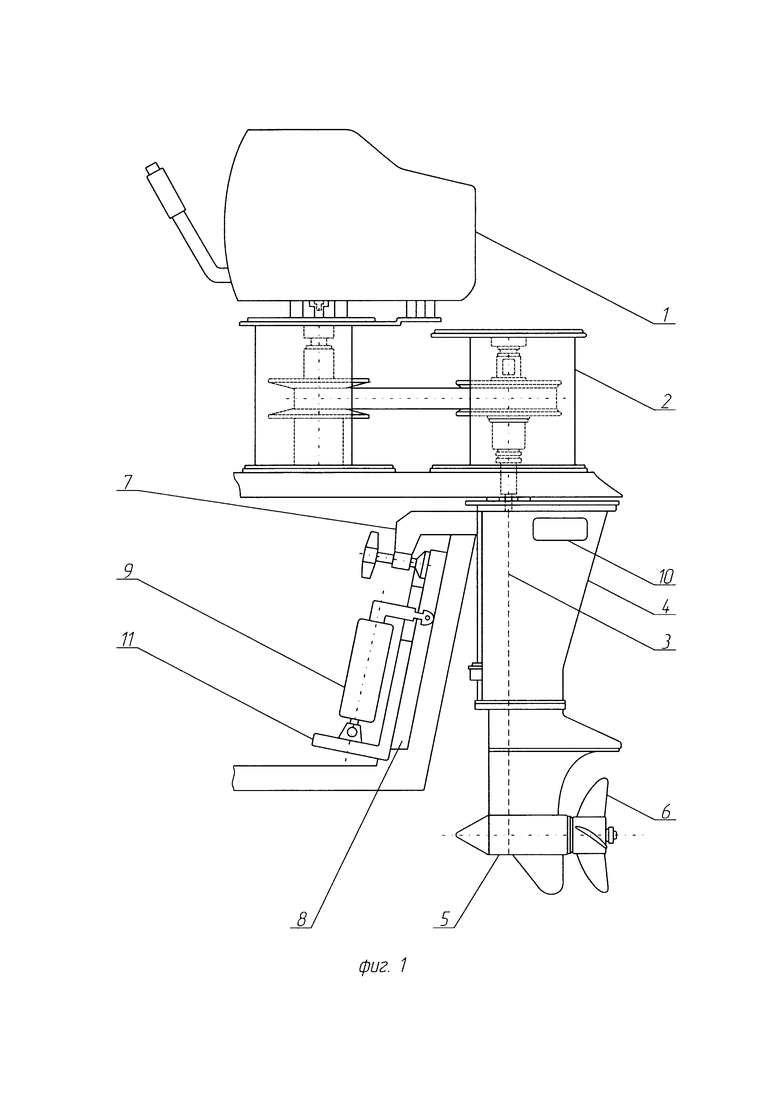
Далее, предложенное изобретение будет подробно рассмотрено с учетом иллюстраций, где на фиг.1 представлен общий вид подвесного лодочного мотора.
Позиции на чертежах:
1 - двигатель;
2 - механизм изменения скорости;
3 - ведущий вал;
4 - дейдвуд;
5 - привод;
6 - гребной винт;
7 - кронштейн;
8 - подвижная плита;
9 - механизм изменения высоты;
10 - электронный блок управления;
11 - неподвижная плита.
Подвесной лодочный мотор включает двигатель 1. Под двигателем 1 понимается цилиндро-поршневой блок с системой подачи и воспламенения топлива. Двигатель 1 взаимодействует с механизмом изменения скорости 2. В качестве механизма изменения скорости 2 может использоваться, например, вариатор (как изображено на фиг.1), коробка передач и подобные механизмы изменения скорости вращения.
Механизм изменения скорости 2 взаимодействует (передает вращение) с ведущим валом 3, который расположен во внутреннем пространстве дейдвуда 4. Ведущий вал 3 связывает механизм изменения скорости 2 с приводом 5 гребного винта 6. Гребной винт 6 может иметь различную конструкцию, различное расположение и формы лопастей, различное число лопастей, например, 3, 4, 5, 6, 7 и пр.
Устройство также включает кронштейн 7, который с одной стороны связан с дейдвудом 4, а с другой с подвижной плитой 8, которая выполнена с возможностью приведения ее в движение, посредством связанного с ней механизма изменения высоты 9 подвесного мотора. Кронштейн 7 посредством крепежного узла, например винтовой струбцины (как показано на фиг.1), или болтового соединения или иного крепежного узла разъемно фиксируется к подвижной плите 8, которая, в свою очередь устанавливается в плавсредстве, предпочтительно в соответствующих - направляющих, с возможностью вертикального или наклонно-вертикального перемещения плиты 8.
Механизм изменения высоты 9 подвесного мотора может иметь различную конструкцию, например, выполнен электромеханическим (например, рейка с шестеренкой или винтовая передача) или гидравлическим (гидроцилиндр) или пневматическим (пневмоцилиндр). Механизм изменения высоты 9 предпочтительно установлен на опоре неподвижной плиты 11, имеющей Г-образную конструкцию, однако может быть закреплен и к элементу плавсредства. Функция механизма изменения высоты 9 заключается в воздействии на плиту 8 для подъема и опускания подвесного лодочного мотора в зависимости от скорости вращения гребного винта 6. Данные изменения необходимы для работы гребного винта в режиме частично погруженного винта при полных оборотах (например, 4000 об/мин) для его разгрузки и снижения нагрузки на мотор. После набора скорости и выхода двигателя на полные обороты, кормовая часть плавсредства заглубляется, а механизм изменения высоты 9 воздействует на подвижную плиту 8, которая поднимает мотор вверх, и гребной винт 6 начинает работать в режиме частично погруженного винта. При выходе на максимальные обороты, мотор поднимается до максимально возможного положения.
Возможен вариант, при котором перемещение механизма изменения высоты 9 подвесного мотора осуществляется ступенчато (пошагово). При достижении гребным винтом 6 соответствующих скоростей вращения, например, подъем высоты лодочного мотора на 0,5 см осуществляется с увеличением скорости вращения винта на каждые 300 об/мин. Данный вариант дополнительно снижает нагрузку на механизм изменения высоты 9, исключая постоянную корректировку высоты в зависимости от минимальных изменений скорости винта 6.
Механизмом изменения скорости 2 и механизм изменения высоты 9 подвесного мотора взаимодействуют синхронно посредством электронного блока управления 10, для изменения высоты лодочного мотора в зависимости от скорости вращения гребного винта 6, причем максимальные обороты гребного винта 6 соответствуют максимально верхнему положению механизма изменения высоты 9 и, соответственно подвесного лодочного мотора.
Необходимо отметить, что конструктивные особенности электронного блока управления 10 не являются предметом данной заявки и в рамках данной заявки описывается в общем виде, как узел, обеспечивающий синхронное управление подъемом/опусканием механизма изменения высоты 9 (а соответственно и высоты лодочного мотора) и синхронное изменение скорости вращения гребного винта 6 (за счет изменения скорости вращения двигателя 1 и механизма изменения скорости 2).
Предпочтительно, электронный блок управления 10 выполняется с возможностью корректировки соотношения изменений высоты лодочного мотора в зависимости от скорости вращения гребного винта 6, например, посредством изменения электронного кода (перепрошивки) электронного блока 10 или внесения корректировок отдельными элементами управления (реле, тумблеры и пр.).
Электронный блок управления 10 дополнительно может включать модуль синхронизации параметров взаимодействия узлов лодочного мотора, то есть электронный блок управления 10 может получать обратный сигнал с элементов, на которые поступает команды, например, сигнал о текущей скорости вращения гребного винта 6, сигнал о текущей высоте гидро/пневмоцилиндра и пр., для корректировки в реальном времени данных параметров для большей точности их работы.
Принцип действия устройства следующий.
Подвесной лодочный мотор устанавливается на плавсредстве. Гребной винт 6 полностью погружен. После запуска лодочного мотора, гребной винт 6 начинает набирать обороты. Когда двигатель выходит на полные (например, 4000 об/мин) обороты, механизм изменения высоты 9 воздействует на подвижную плиту 8, и поднимает лодочный мотор вверх на максимально заданную высоту, обеспечивая разгрузку гребного винта 6 (режим частично погруженного винта) и снижая нагрузку на мотор. Управление оборотами винта 6 и механизмом изменения высоты 9 осуществляется параллельно электронным блоком управления 10, причем максимальные обороты гребного винта 6 соответствуют максимально верхнему положению механизма изменения высоты 9 и, соответственно максимально верхнему положению подвесного лодочного мотора.
Предложенное изобретение обеспечивает упрощение конструкции синхронизации и повышение надежности механизма изменения скорости вращения гребного винта и механизма изменения высоты подвесного мотора, за счет исключения из известной конструкции механических узлов синхронизации, которые подвержены постоянному износу, ослаблению натяжения и пр. (эксцентрики, тросики, качалки, рычаги и пр.) и включение в устройство электронного блока управления 10.
Также данные конструктивные изменения обеспечивают уменьшение задержек на команду изменения скорости/высоты, поскольку изменения параметров взаимодействия узлов осуществляется параллельно и синхронно.
Кроме того, включение в конструкцию электронного блока управления 10 также обеспечивает упрощение настроек синхронизации и возможность внесения в нее корректировок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛОДОЧНЫЙ МОТОР | 2021 |
|
RU2772998C1 |
| АВТОМАТИЧЕСКАЯ ПОДВЕСКА ЛОДОЧНОГО МОТОРА И СПОСОБ РАБОТЫ АВТОМАТИЧЕСКОЙ ПОДВЕСКИ ЛОДОЧНОГО МОТОРА | 2021 |
|
RU2771107C1 |
| МОТОРНОЕ СУДНО | 2022 |
|
RU2776636C1 |
| ЛОДОЧНЫЙ ДВИЖИТЕЛЬ С ПЛАВНИКОМ | 2022 |
|
RU2783691C1 |
| ЛОДОЧНЫЙ ДВИЖИТЕЛЬ С ПЛАВНИКОМ | 2022 |
|
RU2779950C1 |
| ПРИВОД АРНЕСОНА ЛОДОЧНОГО МОТОРА И ЛОДОЧНЫЙ МОТОР, СОДЕРЖАЩИЙ ПРИВОД АРНЕСОНА | 2021 |
|
RU2778412C1 |
| ПОДВЕСНОЙ ЛОДОЧНЫЙ МОТОР | 2015 |
|
RU2583991C1 |
| ПОДВЕСНОЙ ЛОДОЧНЫЙ МОТОР | 2014 |
|
RU2562095C1 |
| УСТРОЙСТВО ЗАЩИТЫ ЛОДОЧНОГО МОТОРА | 2015 |
|
RU2598655C2 |
| ПОДВЕСНОЙ ЛОДОЧНЫЙ МОТОР | 1996 |
|
RU2098317C1 |
Изобретение относится к области судостроения, а именно к движительно-двигательному устройству. Подвесной лодочный мотор включает в себя двигатель, взаимодействующий с механизмом изменения скорости, ведущий вал, расположенный во внутреннем пространстве дейдвуда, связывающий механизм изменения скорости с приводом гребного винта, кронштейн, с одной стороны связанный с дейдвудом, а с другой - с подвижной плитой, которая выполнена с возможностью приведения в движение посредством связанного с ней механизмом изменения высоты подвесного мотора. Механизм изменения скорости и механизм изменения высоты подвесного мотора взаимодействуют между собой синхронно посредством электронного блока управления, для изменения высоты лодочного мотора в зависимости от скорости вращения гребного винта. Максимальные обороты гребного винта соответствуют максимально верхнему положению механизма изменения высоты и, соответственно, максимально верхнему положению подвесного лодочного мотора. Достигается упрощение конструкции синхронизации, повышение надежности механизма изменения скорости вращения гребного винта и механизма изменения высоты подвесного мотора, уменьшение задержек на команду изменения скорости/высоты, упрощение настроек синхронизации и возможность внесения в нее корректировок. 5 з.п. ф-лы, 1 ил.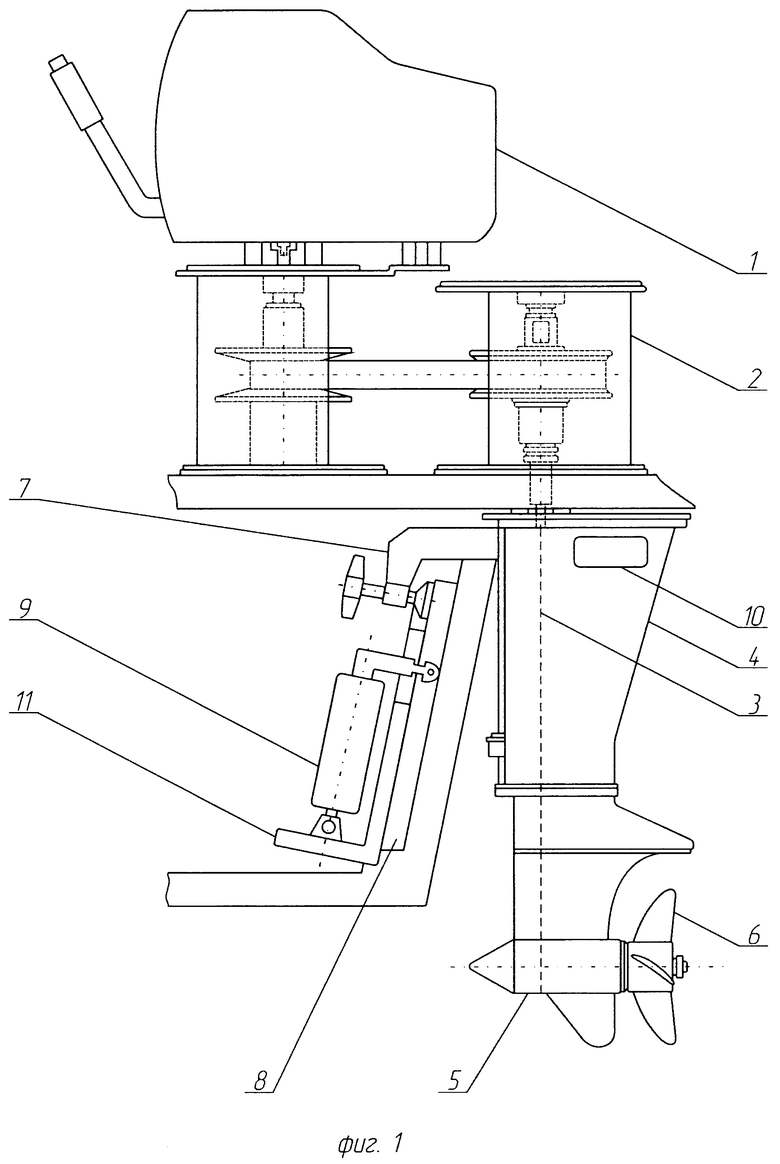
1. Подвесной лодочный мотор, включающий двигатель, взаимодействующий с механизмом изменения скорости, ведущий вал, расположенный во внутреннем пространстве дейдвуда, связывающий механизм изменения скорости с приводом гребного винта, кронштейн, с одной стороны связанный с дейдвудом, а с другой - с подвижной плитой, которая выполнена с возможностью приведения в движение посредством связанного с ней механизмом изменения высоты подвесного мотора, отличающийся тем, что механизм изменения скорости и механизм изменения высоты подвесного мотора взаимодействуют между собой синхронно посредством электронного блока управления, для изменения высоты лодочного мотора в зависимости от скорости вращения гребного винта, причем максимальные обороты гребного винта соответствуют максимально верхнему положению механизма изменения высоты и, соответственно, максимально верхнему положению подвесного лодочного мотора.
2. Подвесной лодочный мотор по п.1, отличающийся тем, что механизм изменения высоты подвесного мотора выполнен электромеханическим, или гидравлическим, или пневматическим.
3. Подвесной лодочный мотор по п.1, отличающийся тем, что механизм изменения высоты установлен на опоре неподвижной плиты.
4. Подвесной лодочный мотор по п.1, отличающийся тем, что электронный блок управления выполнен с возможностью корректировки соотношения изменений высоты лодочного мотора в зависимости от скорости вращения гребного винта.
5. Подвесной лодочный мотор по п.1, отличающийся тем, что электронный блок управления дополнительно может включать модуль синхронизации параметров взаимодействия узлов лодочного мотора.
6. Подвесной лодочный мотор по п.1, отличающийся тем, что перемещение механизма изменения высоты подвесного мотора осуществляется ступенчато (пошагово), при достижении гребным винтом соответствующих скоростей вращения.
| Приспособление для предотвращения ввинчивания гаек | 1929 |
|
SU16491A1 |
| ПОДВЕСНОЙ ЛОДОЧНЫЙ МОТОР | 2015 |
|
RU2583991C1 |
| US 4787868 A1, 29.11.1988 | |||
| US 6877467 B2, 12.04.2005. | |||

