Изобретение относится к области судостроения, а именно к конструкции подвески лодочных моторов и может быть использовано для крепления лодочного мотора к борту маломерных плавучих средств легкого класса с малым водоизмещением.
Известна полезная модель RU 183294 U1 "Подвесной поверхностный привод судна", МПК В63Н 20/00, содержащая параллелограммный механизм подвески и блок электродвигателя и гребного винта, закрепленный с возможностью поворота вокруг вертикальной оси, опора которой закреплена в держателе, выполненном с возможностью поворота вокруг горизонтальной оси, опора которой закреплена на раме механизма подвески, выполненной с возможностью вертикального перемещения рамы, при этом в качестве механизмов вертикального перемещения рамы механизма подвеса, а также регулировки положения блока электродвигателя и гребного винта в горизонтальной и вертикальной плоскости установлены линейные исполнительные механизмы.
Недостатком этого технического решения является ручная дистанционная регулировка погружения гребного винта. (RU 183294 U1, http://new.fips.ru).
Известна полезная модель RU 187468 U1 "Подвесной лодочный мотор повышенной проходимости", МПК В63Н 20/00, содержащая двигатель, установленный на подмоторной плите. На валу двигателя расположен двухрядный шкив ременной передачи, соединенный с валом дейдвуда, на котором закреплен гребной винт и перо руля. На струбцине закреплен регулировочный винт положения дейдвуда в воде. Ручка управления соединена с подмоторной плитой.
Недостатком этого технического решения является ручная регулировка погружения гребного винта. (RU 187468 U1, http://new.fips.ru).
Из известных технических решений наиболее близким по назначению и технической сущности к заявляемому объекту является изобретение RU 2043265 С1 "Автоматическая подвеска подвесного лодочного мотора", МПК В63Н 20/00, F02B 61/04, содержащее опорную плиту, закрепленную на транце лодки с помощью болтов, которая выполнена с двумя ребрами. В ребрах выполнены четыре отверстия, по два в каждом, при этом ось, проходящая через центры отверстий, составляет с плитой угол, по величине равный углу наклона транца лодки. С помощью валов и рычагов опорная плита подвижно связана с втулкой, которая, в свою очередь, связана с дейдвудной трубой подвесного лодочного мотора шпилькой. Валы закреплены в ребрах и во втулке с наружной стороны шайбой с гайкой, кроме того, на валах, расположенных в ребрах, установлены пружины, работающие на кручение, одним концом закрепленные в рычагах, а другим концом на опорной плите. В месте соединения валов, расположенных во втулке с рычагами установлены амортизационные резиновые втулки. На ребрах опорной плиты в нижней части выполнены отверстия регулируемого упора.
Недостатком этого технического решения является ручная регулировка максимального погружения винта за счет установки упора в отверстия, расположенные в нижней части ребер опорной плиты. (RU 2043265 С1, http://new.fips.ru).
Задача, на которую направлено заявленное решение, это разработка подвески лодочного мотора с автоматической регулировкой погружения гребного винта.
Согласно первому объекту изобретения предложена автоматическая подвеска лодочного мотора, включающая неподвижную плиту, закрепленную на транце плавучего средства, соединенную через шарнирный механизм с подвижной плитой. Подвижная плита имеет датчик уровня воды, включающий опорную платформу, на которой расположены концевики подъема и опускания подвижной плиты, а также рычаг, закрепленный подвижно на опорной платформе, один конец которого имеет поплавок, а противоположный конец расположен между концевиками подъема и опускания подвижной плиты.
В одном из вариантов датчик уровня воды выполнен в виде магнитного датчика или емкостного датчика.
Согласно второму объекту изобретения предложен способ работы автоматической подвески лодочного мотора, включающий регулировку погружения гребного винта, при этом для регулировки погружения гребного винта подвеской, изменяется положение поплавка датчика уровня воды, закрепленного на конце рычага, который своим свободным концом воздействует на концевик опускания или концевик подъема подвижной плиты, управляющий сигнал с которых передают блоку управления механизмом вертикального перемещения подвижной плиты, таким образом, изменяя положение подвижной плиты относительно поверхности воды до момента, когда свободный конец рычага выйдет из контакта с концевиком опускания или подъема.
Сущность изобретения
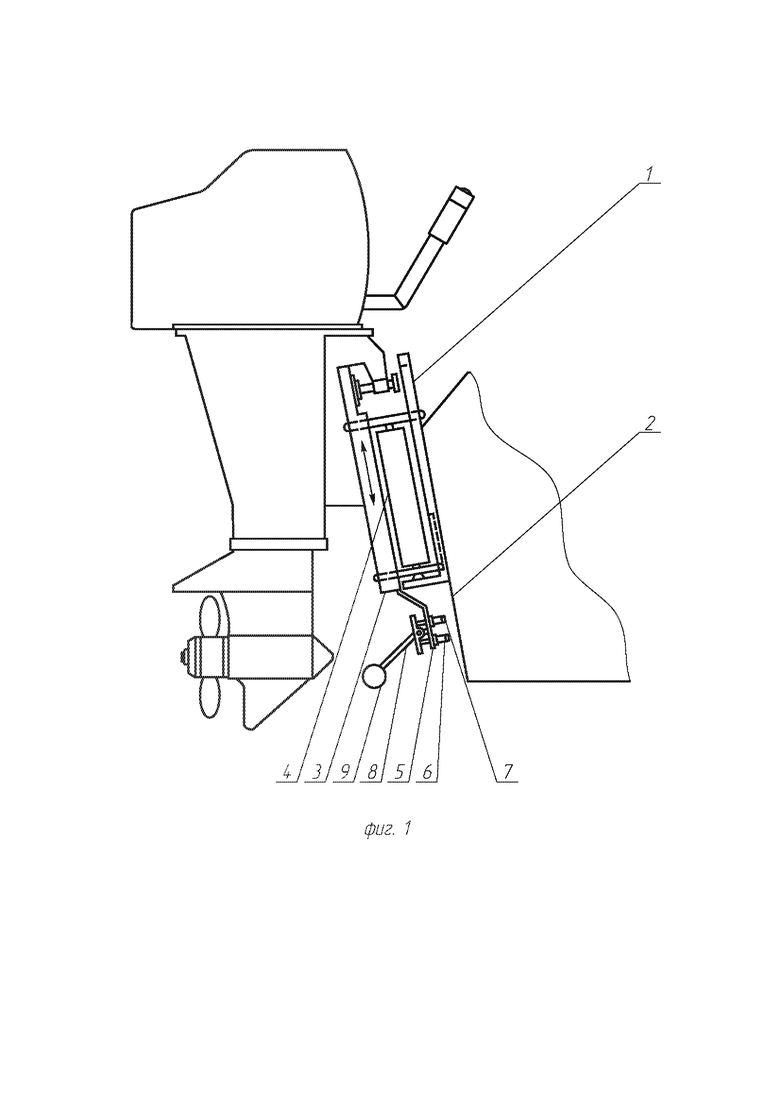
Поставленная задача решается за счет того, что подвижная плита (3) фиг. 1, соединенная с неподвижной плитой (1) через механизм вертикального перемещения (4), имеет датчик уровня воды, включающий опорную платформу (5), на которой расположены концевик подъема (6) и концевик опускания (7) подвижной плиты (3) и рычаг, (8) закрепленный подвижно на опорной платформе (5), имеющий с одного конца поплавок (9). Противоположный конец рычага (8) расположен между концевиками подъема (6) и отпускания (7) подвижной плиты (3).
Подвеска лодочного мотора включает неподвижную плиту (1) фиг. 1 L-образной формы, закрепленную на транце (2) плавучего средства. Неподвижная плита (1) соединена с подвижной плитой (3) через механизм вертикального перемещения (4). Механизм вертикального перемещения (4) выполнен в виде гидроцилиндра или пневмоцилиндра или электропривода и имеет блок управления. Подвижная плита (3) имеет датчик уровня воды. Такое исполнение позволяет автоматически изменять положение подвижной плиты (3), на которой закреплен лодочный мотор относительно уровня воды, тем самым регулируя погружение гребного винта. Датчик уровня воды содержит опорную платформу (5), на которой расположены концевик подъема (6) и концевик опускания (7) подвижной плиты (3) и рычаг (8), закрепленный подвижно на опорной платформе (5), имеющий с одного конца поплавок (9). Свободный конец рычага (8) расположен между концевиками подъема (6) и отпускания (7) подвижной плиты (3). В частном случае исполнения датчик уровня воды выполнен в виде магнитного датчика уровня воды или емкостного датчика уровня воды.
Способ работы автоматической подвески лодочного мотора включает следующую последовательность действий.
Изменяется положение поплавка (9) фиг. 1, который закреплен на конце рычага (8), повышением или снижением уровня воды, тем самым воздействуют свободным концом рычага (8) на концевик опускания (7) или концевик подъема (6) подвижной плиты (3). Управляющий сигнал с концевика опускания (7) или концевика подъема (6) передают блоку управления механизмом вертикального перемещения (4) подвижной плиты (3), таким образом, изменяют положение подвижной плиты (3), на которой зафиксирован лодочный мотор относительно поверхности воды до момента когда свободный конец рычага (8) выйдет из контакта с концевиком опускания (7) или подъема (6) вследствие изменения положения поплавка (9).
Техническим результатом является создание подвески лодочного мотора с автоматической регулировкой погружения гребного винта.
Краткое описание чертежей:
на фиг. 1 - схематическое изображение лодочного мотора закрепленного на транце плавучего средства с помощью подвески. Общий вид.
Краткое описание конструктивных элементов:
1 - неподвижная плита;
2 - транец;
3 - подвижная плита;
4 - механизм вертикального перемещения;
5 - опорная платформа;
6 - концевик подъема подвижной плиты;
7 - концевик опускания подвижной плиты;
8 - рычаг;
9 - поплавок;
Осуществление заявленного решения:
Заявленное решение работает следующим образом.
Лодочный мотор закрепляют на подвижной плите (3) фиг. 1, а неподвижную плиту (1) фиксируют на транце (2) плавучего средства.
При контакте поплавка (9) фиг. 1 с водой и изменением ее уровня при плавании в штормовых условиях свободный конец рычага (8) изменяет свое положение и оказывает воздействие на концевик подъема (6) или на концевик опускания (7) подвижной плиты (3). Управляющий сигнал с концевика опускания (7) или концевика подъема (6) поступает на блок управления механизмом вертикального перемещения (4) подвижной плиты (3), тем самым приводя механизм (4) в движение, изменяя положение подвижной плиты (3), на которой закреплен лодочный мотор относительно поверхности воды до момента, когда свободный конец рычага (8) выйдет из контакта с концевиком опускания (7) или подъема, (6) вследствие изменения положения поплавка (9).
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕСНОЙ ЛОДОЧНЫЙ МОТОР | 2022 |
|
RU2780697C1 |
| АВТОМАТИЧЕСКАЯ ПОДВЕСКА ПОДВЕСНОГО ЛОДОЧНОГО МОТОРА | 1992 |
|
RU2043265C1 |
| ЛОДОЧНЫЙ МОТОР | 2021 |
|
RU2772998C1 |
| ПРИВОД АРНЕСОНА ЛОДОЧНОГО МОТОРА И ЛОДОЧНЫЙ МОТОР, СОДЕРЖАЩИЙ ПРИВОД АРНЕСОНА | 2021 |
|
RU2778412C1 |
| Подъёмник подвесного лодочного мотора | 2023 |
|
RU2822026C1 |
| ПОДВЕСНОЙ ЛОДОЧНЫЙ МОТОР | 2015 |
|
RU2583991C1 |
| ЛОДОЧНЫЙ ДВИЖИТЕЛЬ С ПЛАВНИКОМ | 2022 |
|
RU2779950C1 |
| МОТОРНОЕ СУДНО | 2022 |
|
RU2776636C1 |
| ЛОДОЧНЫЙ ДВИЖИТЕЛЬ С ПЛАВНИКОМ | 2022 |
|
RU2783691C1 |
| ПОДВЕСНОЙ ЛОДОЧНЫЙ МОТОР | 1996 |
|
RU2098317C1 |
Изобретение относится к области судостроения и может быть использовано для крепления лодочного мотора к борту маломерных плавучих средств легкого класса с малым водоизмещением. Подвеска лодочного мотора включает неподвижную плиту (1) L-образной формы, соединенную – с подвижной плитой (3), имеющей датчик уровня воды через механизм вертикального перемещения. Механизм вертикального перемещения выполнен в виде гидроцилиндра или пневмоцилиндра или электропривода и имеет блок управления. Датчик уровня воды содержит опорную платформу (5), на которой расположены концевик подъема (6) и концевик опускания (7) подвижной плиты (3) и рычаг (8), закрепленный шарнирно на опорной платформе (5), имеющий с одного конца поплавок (9). Свободный конец рычага расположен между концевиками подъема (6) и отпускания (7) подвижной плиты (3). Технический результат - создание подвески лодочного мотора с автоматической регулировкой погружения гребного винта. 2 н. и 1 з.п. ф-лы, 1 ил.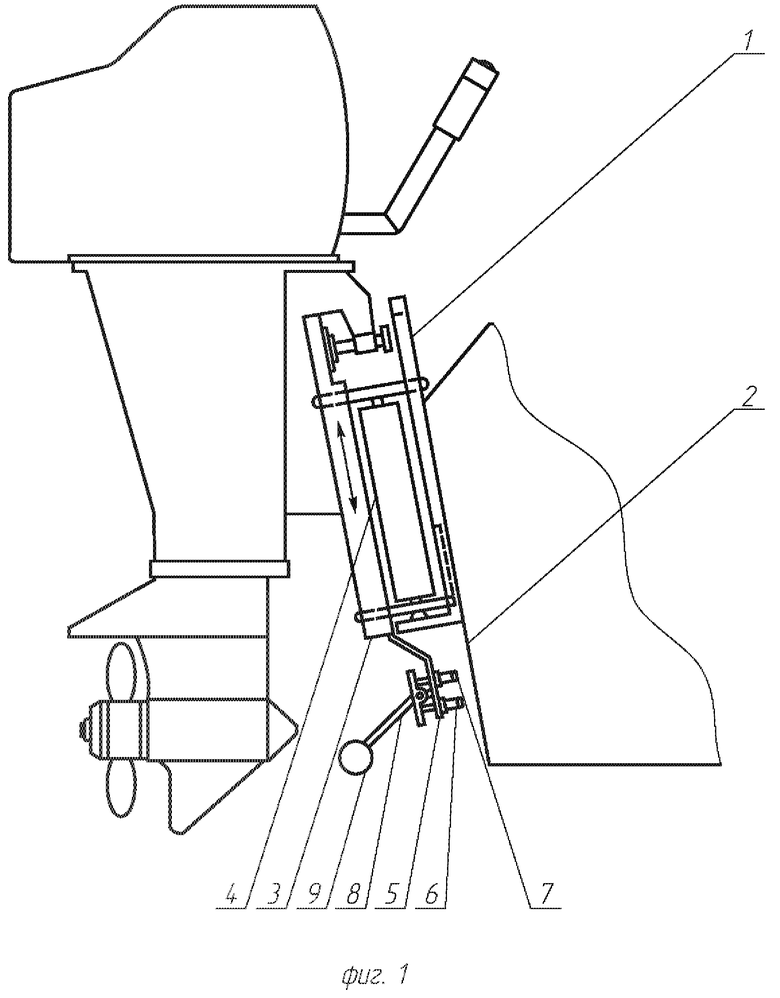
1. Автоматическая подвеска лодочного мотора, включающая неподвижную плиту, закрепленную на транце плавучего средства, соединенную через шарнирный механизм с подвижной плитой, отличающаяся тем, что подвижная плита имеет датчик уровня воды, включающий опорную платформу, на которой расположены концевики подъема и опускания подвижной плиты, а также рычаг, закрепленный подвижно на опорной платформе, один конец которого имеет поплавок, а противоположный конец расположен между концевиками подъема и опускания подвижной плиты.
2. Подвеска по п. 1, отличающаяся тем, что датчик уровня воды выполнен в виде магнитного датчика или емкостного датчика.
3. Способ работы автоматической подвески лодочного мотора, включающий регулировку погружения гребного винта, отличающийся тем, что для регулировки погружения гребного винта подвеской изменяется положение поплавка датчика уровня воды, закрепленного на конце рычага, который своим свободным концом воздействует на концевик опускания или концевик подъема подвижной плиты, управляющий сигнал с которых передают блоку управления механизмом вертикального перемещения подвижной плиты, таким образом, изменяя положение подвижной плиты относительно поверхности воды до момента, когда свободный конец рычага выйдет из контакта с концевиком опускания или подъема.
| ПОДВЕСНОЙ ПОВЕРХНОСТНЫЙ ПРИВОД СУДНА | 2016 |
|
RU2628039C1 |
| СПОСОБ ОЦЕНКИ УРОВНЯ ФУНКЦИОНАЛЬНОЙ СОПРЯЖЕННОСТИ И СИММЕТРИЧНОСТИ МЫШЕЧНЫХ ГРУПП | 2019 |
|
RU2713589C1 |
| US 20200130799 A1, 30.04.2020 | |||
| Пробоотборник грубых консервированных кормов | 1983 |
|
SU1151853A1 |
| AU 4893400 A, 08.03.2001 | |||
| US 4757971 A1, 19.07.1988. | |||

