Изобретение относится к способу управления полетами и посадкой воздушных судов (ВС) в ближней аэродромной зоне при помощи посадочного радиолокатора.
Известны способы посадки ВС при помощи посадочных радиолокаторов (ПРЛ), разработанных для управления полетами и посадкой ВС в ближней аэродромной зоне: ПРЛ-4 [1], РП-3Г [2], ПРЛ радиолокационных систем посадки (РСП) РСП-6М2 [3], РСП-7 [4], РСП-27С [5], посадочный канал радиолокационного комплекса AN/TPN-31 [6], ПРЛ PAR 2090С [7], ПРЛ RP-5M [8], а также ПРЛ [9].
Способы посадки ВС при помощи посадочных радиолокаторов ПРЛ-4 [1], РП-3Г [2] и ПРЛ радиолокационных систем посадки РСП-6М2 [3], РСП-7 [4] разработаны для ПРЛ, использующих зеркальные антенны с механическим сканированием (обзором), что позволяет осуществлять равномерный последовательный обзор воздушного пространства и наблюдение ВС в контролируемой воздушной зоне и совместно с другими наземными радиотехническими средствами обеспечивать управление полетами и посадку ВС на взлетно-посадочную полосу (ВПП) аэродрома.
Недостатком данных способов посадки ВС при помощи указанных ПРЛ является громоздкость конструкции, низкая эксплуатационная технологичность, практическая невозможность серийного изготовления ПРЛ (ввиду морального устаревания элементной базы и материалов), низкая надежность, а также несоответствие точности измерения основных параметров положения (координат) и движения ВС требованиям современных нормативных документов РФ [12] и мировых стандартов (ICAO).
Другим недостатком данных способов посадки ВС с указанными ПРЛ является отсутствие возможности посадки ВС путем организации квазислучайного обзора пространства (неравномерного в плоскости сканирования) с реализацией режима обнаружения и сопровождения ВС с укороченным (по сравнению с периодом обзора) интервалом обновления информации в произвольном направлении (в пределах зоны действия ПРЛ), позволяющим улучшить его энергетические и точностные характеристики.
Способ посадки ВС при помощи посадочного канала радиолокационного комплекса AN/TPN-31 [6] предполагает использование неподвижных курсовой и глиссадной активных фазированных антенных решеток (ФАР) на базе активных приемо-передающих модулей и позволяет наряду с последовательным обзором осуществлять квазислучайный обзор воздушного пространства, предоставляющий возможность организации режима обнаружения и сопровождения ВС в любом произвольном направлении с меняющимся и укороченным периодом обновления информации.
Недостатком данного способа посадки ВС с указанным посадочным каналом является его высокая стоимость, обусловленная использованием в ФАР дорогих активных приемопередающих модулей, и отсутствие возможности оперативной смены направления посадки вследствие наличия одной неподвижной комбинированной глиссадно-курсовой антенны, ориентированной вдоль только одного из двух возможных противоположных направлений посадки ВС на ВПП.
Способ посадки ВС при помощи посадочного радиолокатора PAR 2090C [7] осуществляется путем применения независимых курсовой и глиссадной пассивных антенных решеток ПРЛ, устанавливаемых в заданном направлении за счет разворота с использованием соответствующих опорно-поворотных устройств и выполняющих механическое сканирование зоны обзора.
Недостатком способа посадки ВС при помощи ПРЛ РАR 2090С является равномерное механическое секторное движение антенн при сканировании, что снижает надежность способа и не позволяет организовать квазислучайный обзор пространства для реализации режима обнаружения и сопровождения ВС с укороченным периодом обновления информации.
Другим недостатком способа посадки ВС при помощи ПРЛ РАR 2090С является сложность конструктивного исполнения, предполагающего размещение аппаратуры ПРЛ в двух контейнерах.
Способ посадки ВС при помощи ПРЛ RP-5M [8] реализуется путем использования двух идентичных приемо-передающих каналов, каждый из которых состоит из передатчика, циркулятора, приемника и сигнального процессора, а также зеркальных антенн курса и глиссады, перемещаемых в заданном секторе пространства с помощью опорно-поворотных устройств.
Недостатком способа посадки ВС при помощи ПРЛ RP-5M является использование зеркальных антенн с механическим равномерным сканированием зоны обзора и поворотом антенн на заданное направление посадки, что снижает показатели надежности ПРЛ и не позволяет организовать квазислучайный обзор контролируемого воздушного пространства, обеспечивающий режим сопровождения ВС с укороченным периодом обновления информации. Кроме того, в ПРЛ используется традиционный метод обнаружения и измерения координат ВС по огибающей пакета эхо-сигналов, последовательно принимаемых от ВС в пределах монотонно сканирующей ДН антенны, что приводит к возникновению ошибок измерения координат при флуктуациях или пропадании отдельных импульсов пакета и не позволяет сократить время, необходимое для обнаружения и измерения параметров положения и движения ВС.
Способ посадки ВС при помощи ПРЛ-27С [5], используемый в составе современной отечественной радиолокационной системы посадки РСП-27С для обнаружения и контроля над полетом ВС на траектории захода на посадку, и при помощи ПРЛ [9] осуществляются с применением двух неподвижных пассивных моноимпульсных курсовых AP, ориентированных на противоположные направления посадки, одной пассивной моноимпульсной глиссадной AP, устанавливаемой на заданное направление посадки путем соответствующего поворота в горизонтальной плоскости, и с использованием режима оперативного квазислучайного обзора воздушного пространства при частотном сканировании и моноимпульсной обработке отраженных радиолокационных эхо-сигналов.
Недостатком способа посадки ВС при помощи ПРЛ-27С [5] и ПРЛ [9] является повышенная погрешность измерения угла места (в вертикальной плоскости) ввиду возможного возникновения неоднозначности измерения угломестных координат для низколетящих ВС вследствие повышенного влияния переотражений эхо-сигналов от земной поверхности, что является недопустимым на заключительном этапе захода низколетящих ВС на посадку.
Наиболее близким аналогом (прототипом) изобретения является способ посадки воздушных судов при помощи посадочного радиолокатора, в котором для устранения неоднозначности и уменьшения ошибок определения угломестных координат низколетящих ВС применяется обработка сигналов с использованием комплексной оценки угломестных координат ВС [10].
Способ-прототип обеспечивает посадку всех ВС, находящихся в зоне действия ПРЛ [10], в том числе низколетящих ВС, выполняющих полет и посадку на предельно малых высотах.
Однако отсутствие возможности объективной оценки и текущего непрерывного контроля систематических и случайных погрешностей измерения сферических координат ВС (дальности, азимута и угла места) в процессе штатной работы ПРЛ [10] с целью их последующей минимизации или предупреждения обслуживающего персонала ПРЛ и РСП о выходе погрешностей определения координат обнаруживаемых ВС за пределы допустимых значений, определяет относительно невысокую точность способа-прототипа и соответственно достоверность обнаружения и сопровождения ВС.
При разработке изобретения решалась техническая проблема, заключающаяся в разработке способа посадки воздушных судов при помощи посадочного радиолокатора, лишенного указанных выше недостатков.
При использовании предлагаемого способа достигаются следующие технические результаты:
повышение точности определения местоположения ВС в пространстве при управлении полетами и посадкой ВС при помощи посадочного радиолокатора,
повышение достоверности обнаружения и сопровождения ВС, выполняющих посадку в соответствии с пространственными параметрами плановой линии глиссады снижения в пределах заданных угловых или линейных отклонений по курсу и глиссаде.
Указанные технические результаты достигаются тем, что в способе посадки воздушных судов, включающем получение данных о местоположении ВС в воздушном пространстве с использованием посадочного радиолокатора, содержащего антенну курса, антенну глиссады, установленную на опорно-поворотном устройстве (ОПУ), два идентичных приемо-передающих канала, в состав которых входят передатчики А и В, идентичные блоки обработки информации А и В, содержащие соответственно приемники А и В, устройства управления и сопряжения А и В, блоки фазовращателей (ФВ) А и В, цифровые фазовые детекторы (ЦФД) 1, 2 А и 1, 2 В, модули измерения координат А и В, устройство регистрации, технологический дисплей, согласно изобретению вводят модуль сумматора, выносные контрольные устройства курса 1 и 2, связанные с антенной курса по радиоканалу курсового канала, выносные контрольные устройства (ВКУ) глиссады 1 и 2, связанные с антенной глиссады по радиоканалу глиссадного канала, в блоки обработки информации А и В вводят соответственно модули корректировки координат А и В, модули совпадения А и В, а также модули ошибок А и В, выполняют радиолокационное измерение координат ВКУ курса 1 и 2 и ВКУ глиссады 1 и 2, путем сравнения полученных текущих значений радиолокационных координат ВКУ с известными величинами истинных координат соответствующих ВКУ оценивают текущие систематические и случайные величины ошибок измерения радиолокационных сферических координат (дальность, азимут и угол места) как ВКУ, так и воздушных судов, обнаруживаемых ПРЛ.
Повышение точности и достоверности предлагаемого способа обусловлено следующим. Для обеспечения посадки ВС в предложенном способе используют посадочный радиолокатор, дополнительно включающий выносные контрольные устройства с точно известными геодезическими координатами расположения на аэродроме относительно ПРЛ, что позволяет путем радиолокационного измерения координат ВКУ, выполняемом в ПРЛ, не только получить дополнительный источник достоверных данных об ошибках измерения координат как ВКУ, так и ВС, но и путем их учета и соответствующей корректировки координат ВС повысить точность определения координат ВС и достоверность обнаружения и сопровождения ВС. Измеренные сферические координаты ВКУ, полученные благодаря штатной работе азимутального и угломестного каналов ПРЛ, сравниваются с известными координатами ВКУ, что позволяет оценить систематические и случайные (флуктуационные) ошибки измерения координат ВКУ. Ввиду идентичности причин появления ошибок измерения координат ВКУ и ВС измеренные ошибки координат ВКУ используются для корректировки координат ВС. При осуществлении способа в штатном режиме обеспечивается повышение точности и достоверности обнаружения и сопровождения ВС за счет того, что измерение координат ВС в посадочном радиолокаторе осуществляется с учетом измеренных текущих ошибок. Получение данных о текущих ошибках ВКУ и ВС, а также вычисление координат ВС с учетом текущих ошибок позволяет получать координаты ВС с повышенной точностью и достоверностью. Таким образом, повышается точность и достоверность способа посадки ВС при помощи посадочного радиолокатора.
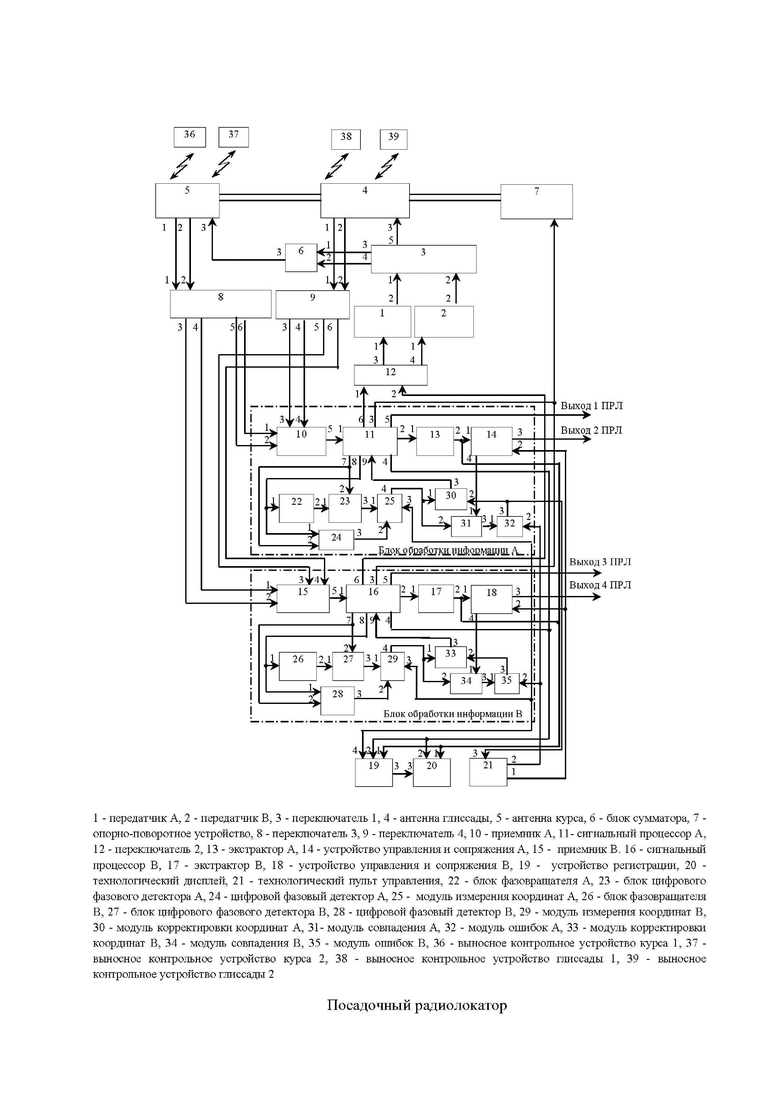
На чертеже представлена функциональная схема посадочного радиолокатора, который может быть использован для осуществления предлагаемого способа посадки воздушных судов при помощи посадочного радиолокатора. На схеме показаны следующие элементы:
1 - передатчик А
2 - передатчик В
3 - переключатель 1
4 - антенна глиссады
5 - антенна курса
6 - блок сумматора
7 - опорно-поворотное устройство
8 - переключатель 3
9 - переключатель 4
10 - приемник А
11- сигнальный процессор А
12 - переключатель 2
13 - экстрактор А
14 - устройство управления и сопряжения А
15 - приемник В
16 - сигнальный процессор В
17 - экстрактор В
18 - устройство управления и сопряжения В
19 - устройство регистрации
20 - технологический дисплей
21 - технологический пульт управления
22 - блок фазовращателя А
23 - блок цифрового фазового детектора А
24 - цифровой фазовый детектор А
25 - модуль измерения координат А
26 - блок фазовращателя В
27 - блок цифрового фазового детектора В
28 - цифровой фазовый детектор В
29 - модуль измерения координат В
30 - модуль корректировки координат А
31- модуль совпадения А
32 - модуль ошибок А
33 - модуль корректировки координат В
34 - модуль совпадения В
35 - модуль ошибок В
36 - выносное контрольное устройство курса 1
37 - выносное контрольное устройство курса 2
38 - выносное контрольное устройство глиссады 1
39 - выносное контрольное устройство глиссады 2
Способ посадки воздушных судов, включающий получение данных о местоположении ВС в воздушном пространстве с использованием посадочного радиолокатора, содержащего антенну курса (5), антенну глиссады (4), опорно-поворотное устройство (ОПУ) (7), причем, антенна глиссады (4) устанавливается на ОПУ (7), два идентичных приемо-передающих канала, в состав которых входят передатчики А (1) и В (2), переключатель 1 (3), входы 1 и 2 которого подключены соответственно к выходам 2 передатчиков А (1) и В (2), а выход 5 подключен к передающему входу 3 антенны глиссады, переключатель 2 (12), выходы 3 и 4 которого подключены соответственно ко входам 1 передатчиков А (1) и В (2), переключатель 3 (8), входы 1 и 2 которого подключены соответственно к выходам 1 и 2 антенны курса (5), переключатель 4 (9), входы 1 и 2 которого подключены соответственно к выходам 1 и 2 антенны глиссады (4), и идентичные блоки обработки информации А и В, содержащие соответственно приемники А(10) и В(15), входы 1 которых подключены соответственно к выходам 6 и 4 переключателя 3 (8), входы 2 подключены соответственно к выходам 5 и 3 переключателя 3 (8), входы 3 подключены соответственно к выходам 3 и 5 переключателя 4 (9), а входы 4 подключены соответственно к выходам 4 и 6 переключателя 4 (9), сигнальные процессоры (11) и (16), входы 1 которых подключены соответственно к выходам 5 приемников (10) и (15), выходы 3 соединены вместе и подключены к входу 1 ОПУ (7), выходы 6 подключены соответственно к входам 1 и 2 переключателя 2 (12), а выходы 5 являются соответственно «Выходом 1 ПРЛ» и «Выходом 3 ПРЛ», экстракторы (13) и (17), входы 1 которых подключены соответственно к выходам 2 сигнальных процессоров (СП) (11) и (16), устройства управления и сопряжения (14) и (18), входы 1 которых подключены соответственно к выходам 2 экстракторов (13) и (17), а выходы 3 являются соответственно «Выходом 2 ПРЛ» и «Выходом 4 ПРЛ», блоки фазовращателей (ФВ) 22 и 26, цифровые фазовые детекторы (ЦФД) 23, 24 и 27, 28, причем, входы 1 блоков ЦФД (23) и (27) подключены соответственно к выходам 2 блоков ФВ (22) и (26), входы 1 блоков ЦФД (24) и (28) подключены соответственно к выходам 8 СП (11) и (16), подключенным соответственно к входам 1 блоков ФВ (22) и (26), а входы 2 блоков ЦФД (24) и (28) подключены соответственно к выходам 7 СП (11) и (16), подключенным соответственно к входам 2 блоков ЦФД (23) и (27), модули измерения координат (25) и (29), входы 1 которых подключены соответственно к выходам 3 блоков ЦФД (23) и (27), а входы 2 подключены соответственно к выходам 3 блоков ЦФД (24) и (28), устройство регистрации (19), входы 1, 2 и 4 которого подключены соответственно к выходам 2 экстракторов (13), (17), к выходам 4 СП (11), (16) и к входам 3 модулей измерения координат (25) и (29), технологический дисплей (20), входы 1, 2 и 3 которого соединены соответственно со входами 1, 2 и выходом 3 устройства регистрации (19), технологический пульт управления (21), выход 1 которого подключен ко входам 2 устройств управления и сопряжения (14) и (18), а также дополнительно снабжена модулем сумматора (6), входы 1 и 2 которого соединены соответственно с выходами 3 и 4 переключателя 1 (3), а выход 3 подключен к передающему входу 3 антенны курса (5), которая дополнительно устанавливается на ОПУ (7), выносными контрольными устройствами курса 1 (36) и 2 (37), связанными с антенной курса (5) по радиоканалу курсового канала, выносными контрольными устройствами глиссады 1 (38) и 2 (39), связанными с антенной глиссады (4) по радиоканалу глиссадного канала, блоки обработки информации А и В дополнительно снабжены соответственно модулями корректировки координат (30) и (33), модулями совпадения (31) и (34), а также модулями ошибок (32) и (35), причем, входы 1 модулей корректировки координат (30) и (33) соединены соответственно со входами 2 модулей совпадения (31) и (34), а также соответственно с выходами 4 модулей измерения координат (25) и (29), входы 2 модулей корректировки координат (30) и (33) подключены соответственно к выходам 3 модулей ошибок (32) и (35), выходы 3 модулей совпадения (31) и (34) подключены соответственно к входам 1 модулей ошибок (32) и (35), выходы 2 которых соединены и подключены к дополнительному выходу 2 технологического пульта управления (21), входы 1 модулей совпадения (31) и (34) подключены к дополнительным выходам 4 соответственно устройств управления и сопряжения (14) и (18), а выходы 3 модулей корректировки координат (30) и (33) подключены к дополнительным входам 9 соответственно сигнальных процессоров (11) и (16). Выполняют радиолокационное измерение координат ВКУ курса 1 и 2 и ВКУ глиссады 1 и 2, путем сравнения полученных текущих значений радиолокационных координат ВКУ с известными величинами истинных координат соответствующих ВКУ оценивают текущие систематические и случайные величины ошибок измерения радиолокационных сферических координат (дальность, азимут и угол места) как ВКУ, так и воздушных судов, обнаруживаемых ПРЛ.
Осуществление предлагаемого способа посадки состоит в следующем.
В способе посадки воздушных судов, включающем получение данных о местоположении ВС в воздушном пространстве с использованием посадочного радиолокатора, содержащего для измерения сферических координат ВС азимутальный канал, оценивающий полярные координаты ВС в горизонтальной (азимутальной) плоскости (азимут, дальность), и угломестный канал, оценивающий полярные координаты ВС в вертикальной (угломестной) плоскости (угол места, дальность), для получения более точных и достоверных данных о местоположении ВС в пространстве используют посадочный радиолокатор, дополнительно включающий выносные контрольные устройства (ВКУ) с точно известными геодезическими координатами, модули выделения и оценки ошибок сферических координат ВКУ, корректируют текущие сферические координаты обнаруженных ВС с учетом полученных оценок ошибок координат ВКУ.
Антенна курса и антенна глиссады формируют по одной передающей диаграмме направленности (ДН) и по две идентичные приемные ДН соответственно в горизонтальной и вертикальной плоскостях, симметрично смещенные относительно электрической оси передающей ДН и обеспечивающие реализацию амплитудного моноимпульсного метода обнаружения и оценки координат ВС в ПРЛ по азимуту и углу места [11].
Антенны курса и глиссады, благодаря установке на одном ОПУ, могут ориентироваться на одно из двух возможных противоположных направлений посадки ВС, в рабочем положении неподвижны при обзоре воздушного пространства, причем, каждая из приемных и передающих антенн, входящих в состав антенн курса и глиссады, реализованы в виде АР, аналогичной АР, используемым в известных ПРЛ с частотным сканированием луча ДН [5, 9 и 10], или в виде АР, аналогичной ПРЛ [6] с фазовым сканированием луча ДН, приемо-передающие излучатели которой подключены к фазовращателям, благодаря которым путем соответствующего управления фазовым распределением фазовращателей реализуется равномерное периодическое или квазислучайное электронное сканирование антенного луча в пределах зон обзора ПРЛ по каналам курса и глиссады.
Введение двух выносных контрольных устройств (ВКУ) (36), (37) по азимуту и двух ВКУ (38), (39) по глиссаде, связанных по радиоканалу соответственно с антенной курса и антенной глиссады и устанавливаемых симметрично относительно ПРЛ в двух противоположных направлениях посадки в непосредственной близости от ПРЛ около взлетно-посадочной полосы (ВПП) аэродрома в точках с точно известными геодезическими координатами, позволяет выполнить при помощи ПРЛ радиолокационное измерение координат ВКУ и путем сравнения полученных текущих значений радиолокационных координат с известными величинами истинных координат ВКУ оценить текущие систематические и случайные величины ошибок измерения радиолокационных сферических координат (дальность, азимут и угол места) как ВКУ, так и ВС, обнаруживаемых ПРЛ наряду с наблюдением ВКУ.
Аппаратура приема и обработки сигналов каналов A и B, каждый из которых включает приемник, сигнальный процессор, фазовращатель, четыре цифровых фазовых детектора, модуль измерения координат, экстрактор, устройство управления и сопряжения, модуль корректировки координат, модуль совпадения и модуль ошибок, выполнена в виде двух автономных блоков обработки информации A и B.
Введение в блоки обработки информации А и В модулей корректировки координат, модулей совпадения и модулей ошибок позволяет оценить по отраженным сигналам ВКУ и откорректировать текущие ошибки измерения сферических координат ВС в ПРЛ и таким путем повысить точность определения сферических координат ВС, заходящих на посадку.
ПРЛ содержит дублированные каналы передачи данных на выносной командный диспетчерский пункт (КДП) управления воздушным движением в виде дублированной широкополосной линии передачи информации (выходы «Вых.1 ПРЛ» и «Вых.3 ПРЛ»), и дублированной узкополосной линии передачи данных (выходы «Вых.2 ПРЛ» и «Вых.4 ПРЛ»).
Работа посадочного радиолокатора в предлагаемом способе состоит в следующем.
В основу работы ПРЛ положено использование двух независимых идентичных приемо-передающих каналов A и B, каждый из которых обеспечивает реализацию алгоритма амплитудного моноимпульсного измерения координат ВС. В ходе штатной работы с целью достижения максимального энергетического потенциала в ПРЛ используются одновременно оба передатчика (1) и (2), а также приемник, сигнальный процессор, экстрактор, блоки ФВ, блоки ЦФД, модуль измерения координат, модуль корректировки координат, модуль совпадения и модуль ошибок одного из блоков обработки информации A или B, причем, каждый из приемных каналов является четырехканальным и выполняет одновременную обработку принимаемых радиолокационных сигналов, поступающих с выходов 1 и 2 антенны курса (5) и с выходов 1 и 2 антенны глиссады (4). Каждая из приемных и передающих антенн, входящих в состав антенн курса и глиссады, реализованы в виде фазированной антенной решетки. Вход передающей антенны является входом 3 антенны курса и глиссады, а выходы приемных антенн являются соответственно выходами 1 и 2 антенн курса и глиссады.
При помощи переключателя 1 (3) через блок сумматора (6) передатчик 1 (1) подсоединяется к передающему входу 3 антенны курса (5), ориентированной на выбранное направление посадки, а передатчик 2 (2) - к антенне глиссады (4), ориентированной на то же направление посадки, или наоборот. В случае выхода одного из передатчиков из строя данный передатчик отключается, и ПРЛ на время ремонта неисправного передатчика переходит на резервный экономичный режим работы только с одним исправным передатчиком. Для этого при помощи переключателя 1 (3) выполняется подключение выхода исправного передатчика одновременно к входам работающей антенны курса (5) и антенны глиссады (6). На выходах 6 сигнальных процессоров (11) и (16) формируются высокочастотные зондирующие (ВЧ) импульсы (ЗИ) низкого уровня мощности, которые поступают соответственно на входы 1 и 2 переключателя (12). На выходы 3 и 4 переключателя 1 (12) поступает один из входных ВЧ ЗИ, который далее с указанных выходов поступает соответственно на входы передатчиков (1) и (2). Таким образом, переключатель 1 (12) обеспечивает одновременную работу передатчиков (1) и (2).
В ПРЛ антенны курса и глиссады имеют ортогональные поляризационные свойства: излучаемые и принимаемые сигналы антенны курса являются горизонтально поляризованными или имеют круговую поляризацию правого (левого) направления вращения, а излучаемые и принимаемые сигналы антенны глиссады являются вертикально поляризованными или имеют круговую поляризацию левого (правого) направления вращения.
С помощью антенны курса (5) и антенны глиссады (4), устанавливаемых при помощи единого опорно-поворотного устройства (7) в заданное направление посадки, производится одновременный секторный обзор воздушного пространства соответственно в азимутальной (горизонтальной) и угломестной (вертикальной) плоскостях с центром в месте расположения фазовых центров антенн курса и глиссады ПРЛ вдоль ВПП аэродрома.
Оперативное изменение обеспечения направления посадки ВС и соответственно направление работы ПРЛ осуществляется разворотом антенны курса и антенны глиссады в горизонтальной плоскости при помощи опорно-поворотного устройства (7).
Антенны курса и глиссады устанавливаются на едином ОПУ (7), при этом строительные оси антенн курса и глиссады совмещаются и юстируются друг относительно друга с высокой точностью, что обеспечивает сохранение взаимного расположения осей антенн при повороте антенн при помощи ОПУ в противоположные направления посадки и соответственно повышает точностные характеристики измерения угловых координат обслуживаемых ВС.
В ходе обзора лучи диаграмм направленности антенн курса и глиссады периодически перемещаются в пределах соответствующих секторов воздушного пространства в горизонтальной (по азимуту) и вертикальной (по углу места) плоскостях. При этом происходит периодическое излучение высокочастотных зондирующих импульсов, усиленных по мощности в передатчиках 1 (1) и 2 (2), а также прием радиолокационных сигналов, отраженных от ВС, их обработка и определение координат ВС в аппаратуре приема и обработки сигналов в блоках обработки информации A или B,
С целью повышения точностных характеристик ПРЛ путем устранения случайных систематических ошибок и контроля над флуктуационными ошибками определения сферических координат ВС в предлагаемом ПРЛ применяется обработка сигналов с дополнительной текущей оценкой ошибок измерения координат ВС, в ходе которой выполняется одновременное измерение полярных координат (дальность, азимут) ВКУ курса, полярных координат (дальность, угол места) ВКУ глиссады, сравнение полученных координат с точно известными сферическими координатами ВКУ (заранее рассчитанными на основании имеющихся точных геодезических координат расположения ВКУ на аэродроме), оценкой величины ошибок (поправок) и последующей корректировкой координат обнаруженных ВС на величину поправок.
Оценка сферических координат ВКУ, как и координат ВС, выполняется в модулях измерения координат (25) или (29), с выходов 4 которых координаты ВКУ и ВС поступают на вход 1 соответственно модулей корректировки координат (30) и (33) и на вход 2 модулей совпадения (31) и (34), которые по стробирующему сигналу, выделяющему координаты ВКУ и поступающему с дополнительного выхода 4 устройств управления и сопряжения (14) и (18) на вход 1 модулей совпадения (31) и (34), обеспечивают прохождение на их выходы 3 только измеренных координат ВКУ.
Выделенные измеренные координаты ВКУ с выхода 3 модулей совпадения (31) и (34) поступают на вход 3 модулей ошибок (32) и (35), где благодаря подаче на вход 2 модулей ошибок (32) и (35) истинных координат по цепи от дополнительного выхода 2 технологического пульта управления (21), выполняется оценка систематических и случайных флуктуационных ошибок координат ВКУ с учетом следующих выражений:
а) для дальности
 ,
,
 ,
,
 , (1)
, (1)
 ,
,
 , (2)
, (2)
где m - номер ВКУ курса и глиссады, m=1÷M, M=4,
n - номер обзора из числа обзоров N, в пределах которых измеряется и усредняется дальность m-го ВКУ, n = 1÷N, N≥10,
 - среднее значение квадрата измеренной дальности m-го ВКУ,
- среднее значение квадрата измеренной дальности m-го ВКУ,
 - дальность m-го ВКУ, измеренная в n-м обзоре,
- дальность m-го ВКУ, измеренная в n-м обзоре,
 - среднее значение измеренной дальности m-го ВКУ,
- среднее значение измеренной дальности m-го ВКУ,
 - систематическая ошибка измерения дальности m-го ВКУ,
- систематическая ошибка измерения дальности m-го ВКУ,
N - количество обзоров, в пределах которых усредняется дальность m-го ВКУ,
 - дисперсия флуктуационной ошибки измерения дальности m-го ВКУ,
- дисперсия флуктуационной ошибки измерения дальности m-го ВКУ,
 - флуктуационная среднеквадратическая ошибка (СКО) измерения дальности m-го ВКУ,
- флуктуационная среднеквадратическая ошибка (СКО) измерения дальности m-го ВКУ,
 - истинная дальность m-го ВКУ,
- истинная дальность m-го ВКУ,
б) для азимута
 ,
,
 ,
,
 , (3)
, (3)
 ,
,
 , (4),
, (4),
где j - номер ВКУ азимута, j=1, 2,
 - среднее значение квадрата измеренного азимута j-го ВКУ,
- среднее значение квадрата измеренного азимута j-го ВКУ,
 - азимут j-го ВКУ, измеренный в n-м обзоре,
- азимут j-го ВКУ, измеренный в n-м обзоре,
 - среднее значение измеренного азимута j-го ВКУ,
- среднее значение измеренного азимута j-го ВКУ,
 - систематическая ошибка измерения азимута j-го ВКУ,
- систематическая ошибка измерения азимута j-го ВКУ,
 - дисперсия флуктуационной ошибки измерения азимута j-го ВКУ,
- дисперсия флуктуационной ошибки измерения азимута j-го ВКУ,
 - среднеквадратическая флуктуационная ошибка измерения азимута j-го ВКУ,
- среднеквадратическая флуктуационная ошибка измерения азимута j-го ВКУ,
 - истинный азимут j-го ВКУ,
- истинный азимут j-го ВКУ,
в) для угла места
 ,
,
 ,
,
 , (5)
, (5)
 ,
,
 , (6),
, (6),
где k - номер ВКУ угла места, k=1, 2,
 - среднее значение квадрата измеренного угла места k-го ВКУ азимута,
- среднее значение квадрата измеренного угла места k-го ВКУ азимута,
 - угол места k-го ВКУ, измеренный в n-м обзоре,
- угол места k-го ВКУ, измеренный в n-м обзоре,
 - среднее значение измеренного угла места k-го ВКУ,
- среднее значение измеренного угла места k-го ВКУ,
 - систематическая ошибка измерения угла места k-го ВКУ,
- систематическая ошибка измерения угла места k-го ВКУ,
 - дисперсия флуктуационной ошибки измерения угла места k-го ВКУ,
- дисперсия флуктуационной ошибки измерения угла места k-го ВКУ,
 - флуктуационная среднеквадратическая ошибка измерения угла места k-го ВКУ,
- флуктуационная среднеквадратическая ошибка измерения угла места k-го ВКУ,
 - истинный угол места k-го ВКУ.
- истинный угол места k-го ВКУ.
На выходе 3 модулей ошибок (32) и (35) формируется оценка систематических ошибок измерения дальности, азимута и угла места ВКУ соответственно по выражениям (1), (3) и (5), а также случайных флуктуационных ошибок измерения дальности, азимута и угла места ВКУ соответственно по выражениям (2), (4) и (6).
Результаты полученных систематических и флуктуационных ошибок измерения координат ВКУ могут быть распространены также на ошибки ВС ввиду идентичности причин их появления.
Текущая оценка систематических ошибок координат ВКУ в модулях ошибок (32) и (35) позволяет обеспечить компенсацию систематических составляющих ошибок измерения координат ВС путем вычитания в модулях корректировки координат (30) и (33) из текущих координат ВС, подаваемых на вход 1 модулей корректировки координат (30) и (33) с выхода 4 соответствующих модулей измерения координат (25) и (29), значений полученных систематических ошибок (1), (3) и (5).
Таким образом, на выходе 3 модулей корректировки координат (30) и (33) на основании измеренных величин текущих координат ВС и ВКУ, поступающих с выхода 4 модулей измерения координат (25) и (29), а также величин систематических ошибок по дальности, азимуту и углу места, поступающих с выхода 3 модулей ошибок (32) и (35), формируются уточненные откорректированные координаты ВС и ВКУ, формируемые с учетом выражений (1), (3) и (5) на величины соответствующих систематических ошибок.
Например, предположим, что по результатам измерения в модулях измерения координат (25) и (29) текущей дальности до m-го ВКУm получена величина Rmср=530м. Если истинная дальность ВКУm, поступающая от дополнительного выхода 2 технологического пульта управления (21) на входы 3 модулей ошибок (32) и (35), составляет величину Rmи=500м, то на выходе 3 модулей ошибок (32) и (35) получается систематическая ошибка оценки дальности ВКУm, определяемая согласно выражению (1) величиной
 (7)
(7)
Для данного примера в модулях корректировки координат (30) и (33) произойдет корректировка текущей дальности Rmср, измеренной в модулях измерения координат (25) и (29), на величину систематической ошибки ΔmR=30 м, оцененной в модулях ошибок (32) и (35), с учетом величины (7) по выражению

Таким образом, систематическая ошибка измерения дальности ВКУm и других ВКУ, а также систематические ошибки измерения дальностей ВС в модулях корректировки координат (30) и (33) компенсируются, величина откорректированной дальности ВКУm  , а также откорректированных дальностей других ВКУ и ВС будет соответствовать истинным значениям, что повышает точность измерения дальности ВС в ПРЛ.
, а также откорректированных дальностей других ВКУ и ВС будет соответствовать истинным значениям, что повышает точность измерения дальности ВС в ПРЛ.
Аналогичным образом с учетом выражений (3), (5), а также выражений, аналогичных (7), устраняются систематические ошибки оценки угловых координат в ПРЛ по азимуту и углу места, что повышает точность измерения угловых координат ВС в ПРЛ.
Для контроля над величиной текущих систематических и флуктуационных ошибок измерения координат ВКУ и ВС в ПРЛ значения ошибок с выходов 3 модулей ошибок (32) и (35) поступают также на дополнительный вход 3 технологического пульта управления (21), что позволяет автоматическому устройству контроля, установленному в пульте (21), или оператору пульта (21) проводить текущий контроль над величиной ошибок и, в случае превышения ошибок измерения координат пределов допустимых значений, принимать решение о возможности дальнейшей работы и использования ПРЛ для управления полетами и посадкой ВС, информируя об этом при необходимости руководителя полетов, находящегося на КДП аэродрома.
Например, пусть по результатам измерения флуктуационных ошибок в модулях ошибок (32) и (35) с учетом выражений (2), (4) и (6) получены величины среднеквадратических ошибок (СКО) измерения сферических координат ВКУ
 - по дальности,
- по дальности,
= 7 м 1 - по азимуту, (8)
= 5 м 2 - по углу места.
Примечание:
1 - линейная ошибка в определении отклонения ВС от заданной траектории снижения по азимуту,
2 - линейная ошибка в определении отклонения ВС от заданной траектории снижения по углу места.
Согласно требованиям нормативных документов РФ и ICAO на посадочные радиолокаторы СКО оценки сферических координат в ходе штатной работы ПРЛ, обеспечивающей безаварийную посадку ВС, не должны превышать значений [12]
 - по дальности,
- по дальности,
= 9 м - по азимуту, (9)
= 6 м - по углу места.
Для приведенного примера сравнительный анализ соответствующих величин по выражениям (8) и (9), выполняемый в технологическом пульте управления 21, показывает, что флуктуационные ошибки оценки сферических координат объективно соответствуют нормативным требованиям и основным точностным характеристикам ПРЛ.
На основании такого заключения автоматическое устройство контроля в пульте (21) или оператор пульта (21) принимает решение о нормальном текущем функционировании ПРЛ и соответственно о продолжении штатной эксплуатации ПРЛ.
В противном случае, при превышении СКО оценки координат допустимых предельных значений (9) принимается решение об ухудшении точностных характеристик работы ПРЛ или аварийной ситуации и невозможности продолжения дальнейшей штатной эксплуатации ПРЛ.
Эффективность нового способа посадки при помощи посадочного радиолокатора подтверждена положительными результатами моделирования его применения для обеспечения посадки ВС при использовании нового посадочного радиолокатора ПРЛ-2СТ, разработанного в 2021 году в АО «ЧРЗ «Полет».
Использование способа посадки при помощи посадочного радиолокатора ПРЛ-2СТ с дополнительными устройствами в составе ВКУ (36)÷(39), модули корректировки координат (30) и (33), модули совпадения (31) и (34), модули ошибок (32) и (35), с установкой антенны курса (5) на ОПУ (7), где располагается антенна глиссады (4), позволяет повысить точностные характеристики оценки координат, достоверность обнаружения и сопровождения ВС в ПРЛ-2СТ, а также упростить состав антенной системы, исключив дополнительную антенну курса.
ЛИТЕРАТУРА
1. Описание ПРЛ-4 [онлайн, найдено в Интернете на http://hist.rloc.ru/lobanov/6_16_5.htm.
2. Описание РП-3Г найдено в монографии «П.С. Давыдов, А.А. Сосновский, И.А. Хаймович. Авиационная радиолокация. Справочник. Под редакцией П.С. Давыдова. - М., изд. «Транспорт», 1984 г. (с. 125)».
3. Описание РСП-6М2 [онлайн, найдено в Интернете на http://www.eandc.ru/news/detail.php?ID=18434.
4. Описание РСП-7 [онлайн, найдено в Интернете на http://museum.radioscanner.ru/avionika/aviomuzens/rsp_7/rsp_7.html.
5. Описание ПРЛ-27С [онлайн, найдено в Интернете на http://www.vniira.ru/doc/catalogue/1188.pdf.
6. Описание AN/TPN-31 [онлайн, найдено в Интернете на http://www.fas.org/man/dod-101/sys/ac/equip/an-tpn-31.htm или на http://www.deagel.com/Special-Purpose-Vehicles/ANTPN-31-ATNAVICS_a000607001.aspx.
7. Описание PAR 2090C [онлайн, найдено в Интернете на https://www.leonardocompany.com/en/products/par2090c.
8. Описание RP-5M [онлайн, найдено в Интернете на https://www.radartutorial.eu/19.kartei/03.atc/karte026.ru.html.
9. Патент РФ 2556708, МПК G01S13/52. Посадочный радиолокатор. Иванов В.П., Король В.М., Синицын Е.А., Коршунов А.Ю. Заявка 2014.03.17. Опубл. 2015.07.20.
10. Патент РФ 2721785C1, МПК G01S13/00. Посадочный радиолокатор. Ершов Г.А., Синицын Е.А. и др. Заявка 2019.04.08. Опубл. 2020.05.22.
11. Леонов, А.И. Моноимпульсная радиолокация / А.И. Леонов, К.И. Фомичев. - М.: Радиосвязь, 1984. - 312 с.
12. Межгосударственный авиационный комитет. Авиационные правила. Часть 170 «Сертификация оборудования аэродромов и воздушных трасс» (АП-170). Том II «Сертификационные требования к оборудованию аэродромов и воздушных трасс». Издание третье, 2013.
| название | год | авторы | номер документа |
|---|---|---|---|
| Посадочный радиолокатор | 2021 |
|
RU2779294C1 |
| Радиолокационная система посадки | 2021 |
|
RU2779160C1 |
| Посадочный радиолокатор | 2019 |
|
RU2721785C1 |
| Способ управления полетами и посадкой воздушных судов при помощи радиолокационной системы посадки | 2022 |
|
RU2797994C1 |
| ПОСАДОЧНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2556708C1 |
| Активная радиолокационная система захода и посадки | 2019 |
|
RU2705855C1 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС РАДИОЛОКАЦИОННОЙ АППАРАТУРЫ | 2001 |
|
RU2199719C1 |
| СПОСОБ АВТОНОМНОГО ФОРМИРОВАНИЯ ПОСАДОЧНОЙ ИНФОРМАЦИИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И БОРТОВОЙ РАДИОЛОКАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2303796C1 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2004 |
|
RU2273590C1 |
Изобретение относится к способу управления полетами и посадкой воздушных судов (ВС) в ближней аэродромной зоне при помощи посадочного радиолокатора (ПРЛ). Техническим результатом изобретения является повышение точности определения местоположения ВС в пространстве при управлении полетами и посадкой ВС при помощи посадочного радиолокатора, и повышение достоверности обнаружения и сопровождения ВС, выполняющих посадку в соответствии с пространственными параметрами плановой линии глиссады снижения в пределах заданных угловых или линейных отклонений по курсу и глиссаде. Способ посадки воздушных судов включает получение данных о местоположении ВС в воздушном пространстве с использованием посадочного радиолокатора, выполнение радиолокационного измерения координат выносных контрольных устройств (ВКУ) курса 1 и 2 и ВКУ глиссады 1 и 2 и путем сравнения полученных текущих значений радиолокационных координат ВКУ с известными величинами истинных координат соответствующих ВКУ оценивание текущих систематических и случайных величин ошибок измерения радиолокационных сферических координат (дальность, азимут и угол места) как ВКУ, так и воздушных судов, обнаруживаемых ПРЛ. 1 ил.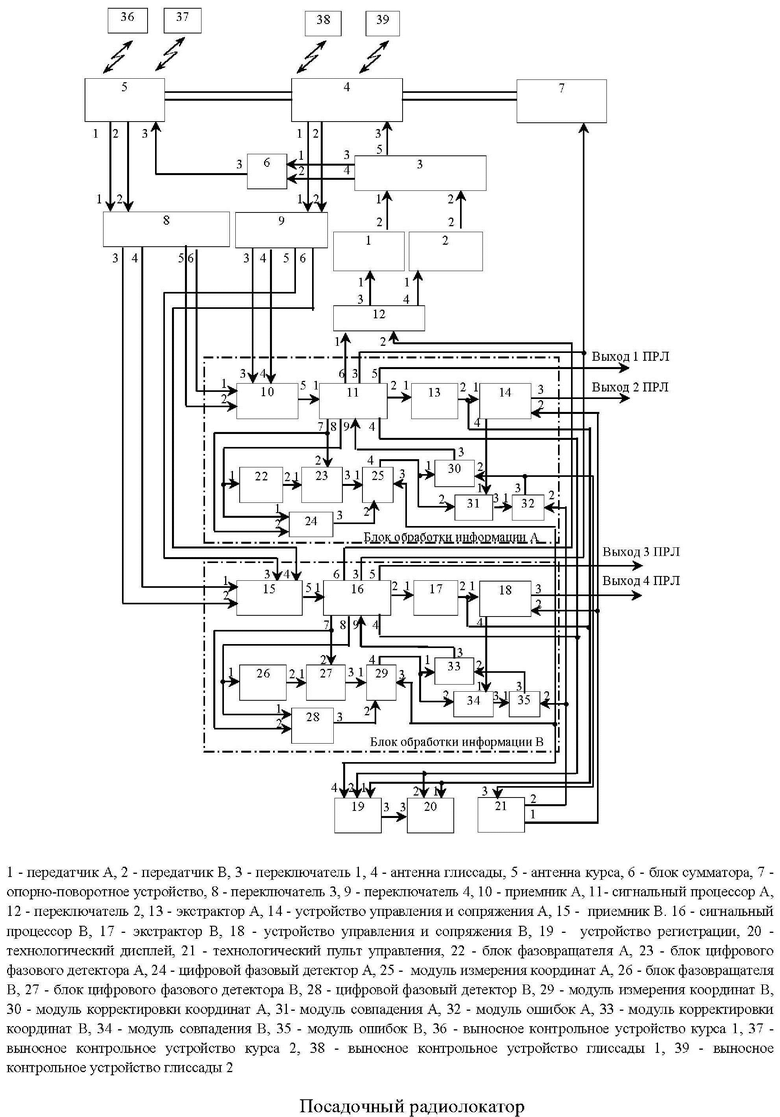
Способ посадки воздушных судов (ВС), включающий получение данных о местоположении ВС в воздушном пространстве с использованием посадочного радиолокатора (ПРЛ), содержащего антенну курса, антенну глиссады, установленную на опорно-поворотном устройстве (ОПУ), два идентичных приемо-передающих канала, в состав которых входят передатчики А и В, идентичные блоки обработки информации А и В, содержащие соответственно приемники А и В, устройства управления и сопряжения А и В, блоки фазовращателей (ФВ) А и В, цифровые фазовые детекторы (ЦФД) 1, 2 А и 1, 2 В, модули измерения координат А и В, устройство регистрации, технологический дисплей, отличающийся тем, что вводят модуль сумматора, выносные контрольные устройства курса 1 и 2, связанные с антенной курса по радиоканалу курсового канала, выносные контрольные устройства (ВКУ) глиссады 1 и 2, связанные с антенной глиссады по радиоканалу глиссадного канала, в блоки обработки информации А и В вводят соответственно модули корректировки координат А и В, модули совпадения А и В, а также модули ошибок А и В, выполняют радиолокационное измерение координат ВКУ курса 1 и 2 и ВКУ глиссады 1 и 2, путем сравнения полученных текущих значений радиолокационных координат ВКУ с известными величинами истинных координат соответствующих ВКУ оценивают текущие систематические и случайные величины ошибок измерения радиолокационных сферических координат (дальность, азимут и угол места) как ВКУ, так и воздушных судов, обнаруживаемых ПРЛ.
| Посадочный радиолокатор | 2019 |
|
RU2721785C1 |
| ПОСАДОЧНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2556708C1 |
| Способ подсочки лиственницы | 1961 |
|
SU151147A1 |
| СПОСОБ АВТОНОМНОГО ФОРМИРОВАНИЯ ПОСАДОЧНОЙ ИНФОРМАЦИИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И БОРТОВОЙ РАДИОЛОКАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2303796C1 |
| US 3716860 A, 13.02.1973 | |||
| US 2016139603 A1, 19.05.2016 | |||
| US 2020168112 A1, 28.05.2020 | |||
| US 3739385 A, 12.06.1973. | |||

