Предлагаемое изобретение относится к области радиолокации. В частности, к области радиолокационного оборудования летательных аппаратов (ЛА).
Изобретение предназначено для выработки информации, необходимой и достаточной для посадки ЛА в простых и сложных метеоусловиях вплоть до полного отсутствия видимости как на аэродромы с бетонным покрытием, так и на полевые аэродромы, не оборудованные светотехническими средствами, и временные посадочные площадки.
Известен способ выработки посадочной информации на борту ЛА, заключающийся в том, что осуществляют радиолокационный обзор в переднем секторе, прием и отображение радиолокационной информации на экране индикатора в координатах "угол азимута-дальность", формирование и отображение на экране индикатора метки нулевого азимутального угла антенны [Акт по результатам совместных Государственных (этап А) летных испытаний опытного образца радиолокатора визуализации ВПП "Видимость", 1981 г., стр.13. РЛС "Модар 4000", Экспресс-информация "Зарубежные авиационные системы", ГосНИИ АС, №21 Июнь 1993 г.].
Этот способ реализован в бортовом радиолокаторе НПО "Ленинец", а также в радиолокаторе "Модар 4000" фирмы Вестингауз. Он обеспечивает выработку информации об отклонении ЛА от оси взлетно-посадочной полосы (ВПП) в горизонтальной плоскости на расстоянии 4-5 км от начала ВПП с бетонным покрытием и о расстоянии до начала ВПП.
Недостатками данного способа являются отсутствие информации об отклонении ЛА от глиссады в вертикальной плоскости, невозможность автоматического измерения расстояния до начала ВПП и ее производной, недостаточная точность измерения угла сноса и бокового отклонения ЛА от оси ВПП при больших величинах угла сноса, низкая дальность обнаружения ВПП с бетонным покрытием, отсутствие информации о высоте над подстилающей поверхностью и о высоте относительно плоскости ВПП, невозможность получения всей указанной информации на полевых аэродромах и посадочных площадках.
Наиболее близким техническим решением является способ автономного формирования посадочной информации для ЛА по патенту СССР №1836642 от 08.04.1991 г., G01S 13/00.
В этом способе осуществляют радиолокационный обзор в переднем секторе, прием и отображение радиолокационной информации на экране индикатора в координатах "угол азимута-дальность", вычитание из сигнала курса летательного аппарата, поступающего от курсовой системы, сигнала заданного посадочного курса взлетно-посадочной полосы и сигнала азимутального угла антенны и формирование, тем самым, сигнала относительного азимутального угла и сигнала нулевого относительного курса, измерение асимметрии изображения взлетно-посадочной полосы относительно радиальной линии путем анализа отображения радиолокационной информации и формирование, тем самым, сигнала отклонения летательного аппарата от оси взлетно-посадочной полосы в горизонтальной плоскости, измерение дальностей до подстилающей поверхности в направлении линии визирования, установленной по оси наклона под углом места, равным углу наклона глиссады к плоскости горизонта, для данного типа летательного аппарата, и стабилизированной по тангажу, и формирование, тем самым, сигнала дальности следа линии визирования
Недостатком этого способа является следующее.
При определении положения центра масс (ЦМ) ЛА относительно заданной траектории посадки путем измерения дальности до подстилающей поверхности вдоль линии визирования имеет место ошибка, обусловленная разностью координат положения антенны радиолокатора (РЛ) и ЦМ ЛА, величина которой возрастает с увеличением угла тангажа и размеров ЛА. Кроме того, на этапе выравнивания становится необходимой информация о высоте ЦМ относительно плоскости ВПП уже вблизи точки начала выравнивания (ТНВ), которая не может быть получена путем измерения дальности в вертикальном направлении, если подстилающая поверхность не находится в одной плоскости с ВПП и не приняты специальные меры для ее выравнивания, которое не всегда возможно.
Целью изобретения является повышение точности выполнения маневра посадки.
Поставленная цель достигается тем, что в способе автономного формирования посадочной информации для летательного аппарата, включающем одновременно радиолокационный обзор в секторе передней полусферы с регистрацией информации в координатах "угол азимута-дальность", вычитание из сигнала курса летательного аппарата, поступающего от курсовой системы, сигнала заданного посадочного курса взлетно-посадочной полосы и сигнала азимутального угла антенны и формирование, тем самым, сигнала относительного азимутального угла и сигнала нулевого относительного курса, измерение асимметрии изображения взлетно-посадочной полосы относительно радиальной линии путем анализа отображения радиолокационной информации и формирование, тем самым, сигнала отклонения летательного аппарата от оси взлетно-посадочной полосы в горизонтальной плоскости, измерение дальностей до подстилающей поверхности в направлении линии визирования, установленной по оси наклона под углом места, равным углу наклона глиссады к плоскости горизонта, для данного типа летательного аппарата, и стабилизированной по тангажу, и формирование, тем самым, сигнала дальности следа линии визирования, вычитают из текущего значения сигнала дальности следа линии визирования значение функции от угла тангажа, учитывающей заданные значения угла глиссады, и разности относительных координат центра масс и антенны радиолокатора, при текущем значении сигнала угла тангажа, поступающего от датчика вертикали, фильтруют полученный сигнал разности, и формируют, тем самым, сигнал сглаженной дальности следа линии визирования, приведенной к центру масс летательного аппарата, вычитают из этого сигнала сигнал дальности до начала взлетно-посадочной полосы, полученный из анализа отображения радиолокационной информации, и формируют, тем самым, сигнал отклонения от глиссады летательного аппарата в вертикальной плоскости, умножают текущее значение полученного сигнала приведенной дальности следа линии визирования на принятое значение функции от заданного угла глиссады и формируют, тем самым, сигнал относительной высоты центра масс, для чего в бортовой радиолокатор для формирования посадочной информации, содержащий антенну 1, приемо-передающий блок (ППБ) 2, дальномер 3, причем выход-вход суммарного канала ППБ 2 соединен с входом-выходом суммарного канала антенны 1, разностный выход которой соединен с разностным входом ППБ 2, выход сигнала отношения разностного сигнала к суммарному которого соединен с входом дальномера 3, введены блок приведения к центру масс и фильтрации (БПЦМФ) 4, блок формирования сигнала относительной высоты центра масс (БФСОВЦМ) 5, блок формирования сигналов азимутальных углов (БФСАУ) 6, блок формирования сигналов управления и контроля (БФСУК) 7, причем выход суммарного сигнала ППБ 2 соединен с первым входом, а выход синхросигнала - с седьмым входом БФСУК 7, выход дальномера 3 соединен с первым входом БПЦМФ 4, второй вход которого является входом сигнала тангажа, третий вход - входом сигнала заданного значения угла глиссады, выход которого соединен с первым входом БФСОВЦМ 5, второй вход которого является входом сигнала заданного значения угла глиссады, и вторым входом БФСУК 7, третий вход которого соединен с выходом БФСОВЦМ 5, четвертый вход соединен с первым выходом БФСАУ 6, пятый - с вторым выходом этого блока, шестой вход является входом сигнала тангажа, третий выход БФСАУ 6 соединен с входом сигнала реверса антенны 1, первый вход БФСАУ 6 является входом сигнала курса летательного аппарата, второй - сигнала заданного посадочного курса, третий - заданного значения величины сектора сканирования антенны 1, четвертый вход соединен с выходом сигнала азимутального угла антенны 1.
На фиг.1 представлена функциональная схема бортового радиолокатора (РЛ), реализующего данный способ, где 1 - антенна, 2 - ППБ, 3 - дальномер, 4 - БПЦМФ, 5 - БФСОВЦМ, 6 - БФСАУ, 7 - БФСУК.
На фиг.2 представлен чертеж, поясняющий вывод формулы для вычисления приведенной дальности следа линии визирования.
Сущность способа поясняется на примере его реализации в бортовом радиолокаторе.
РЛ работает следующим образом.
Широкополосный высокочастотный сигнал с выхода ППБ 2 поступает на вход-выход суммарного канала антенны 1 и излучается в пространство, определяемое суммарной диаграммой направленности антенны (ДНА).
В ППБ 2, содержащем передатчик и приемник, выполненный, например, по схеме двухканального моноимпульсного приемника на УПЧ с идентичными логарифмическими характеристиками, осуществляется усиление, временная автоматическая регулировка усиления, сжатие сигналов по длительности (если необходимо), определение величины и знака отношения сигнала в разностном канале к сигналу в суммарном канале, детектирование раздельно по суммарному и разностному каналу. Если дальнейшая обработка сигналов ведется в цифровом виде, то в состав приемника включаются аналого-цифровые преобразователи.
Сигнал с выхода ППБ 2, характеризующий изменение во времени величины отношения значений сигналов в разностном и суммарном каналах приемника, поступает на вход дальномера 3, где осуществляется измерение дальности расположения заданной величины сигнала, определяемой в зависимости от выбранного направления линии визирования относительно оси ДНА и ее пеленгационной характеристики. Так, если линия визирования совпадает с осью ДНА, установленной по наклону под углом, равным углу наклона глиссады к плоскости горизонта, а ось сканирования антенны по азимуту стабилизирована по тангажу (стабилизация по крену исключена), то измеряется дальность положения сигнала с минимальным значением абсолютной величины отношения сигналов в разностном и суммарном каналах.
Полученный таким образом сигнал с информацией о дальности (относительно антенны РЛ) пересечения линии визирования с подстилающей поверхностью для каждого периода частоты повторения РЛ поступает на вход БПЦМФ 4, на второй вход которого поступает сигнал текущего значения угла тангажа - p, а на третий - сигнал заданного значения угла глиссады - q, выполненного, например, на спецвычислителе, осуществляющем вычисление по формуле, вывод которой делается на основании рассмотрения фиг.2,
где Dc - дальность следа линии визирования от ЦМ ЛА;
Da - дальность следа линии визирования от антенны РЛ;
l, h - разность координат ЦМ и антенны РЛ по оси абсцисс и ординат соответственно в локальной системе координат ЛА;
q - заданный угол глиссады;
p - текущий угол тангажа.
Из рассмотрения фиг.2 следует





Из выражений (1)-(5) находим

Далее сигнал фильтруется, в результате чего осуществляется его сглаживание на интервале времени, например одной десятой периода обзора (скана). При сглаживании оставляются без изменения значения сигнала, имеющие резкие перепады в сторону меньших дальностей, так как это могут быть сигналы от препятствий, как на ВПП, так и в зоне подхода к ней.
Сформированный таким образом сигнал дальности сглаженного следа линии визирования (ССЛВ), приведенной к ЦМ ЛА, с выхода БПЦМФ 4 поступает на второй вход БФСУК 7, на первый вход которого поступает сигнал с суммарного выхода ППБ 2, на седьмой - синхросигнал, например, представляющего собой индикатор, на экране которого изображают этот сигнал в виде линейной метки - ССЛВ на фоне остальной РЛ-информапии, и (или) процессор, выполняющий обнаружение изображения ВПП и сравнение дальностей начала ВПП и ССЛВ и формирование, тем самым, сигнала вертикального отклонения ЛА от заданной траектории посадки (ЗТП) для автопилота.
При движении самолета строго по прямолинейной глиссаде и отсутствии крена метка ССЛВ совмещена с изображением начала ВПП или радиолокационного ориентира, располагаемого вблизи начала ВПП.
Наличие вертикального отклонения от глиссады величиной Z приводит к смещению по дальности метки ССЛВ относительно начала ВПП в соответствующем направлении, равному

где q - угол наклона глиссады и линии визирования (оси ДНА) к плоскости горизонта.
Следовательно, для стандартной глиссады (q=3 град) Е=20Z.
Наличие крена самолета, если антенна стабилизирована только по углу тангажа, приводит к изменению угла наклона линии визирования к плоскости горизонта в процессе ее сканирования по азимуту. Так, при значении азимутального угла γ, равном нулю (плоскость симметрии ДНА перпендикулярна плоскости ЛА), угол падения линии визирования (ЛВ) на плоскость ВПП определяется сторонами треугольника Н и d' (см. Фиг.3), и равен

где Н - высота ЛА;
q - угол наклона глиссады (знак "минус" вверх);
r - угол крена ЛА (знак "минус" - правый крен);
d' - наклонная дальность до плоскости ВПП вдоль ЛВ.
При значении азимутального угла γ (знак "минус" - вправо от оси ЛА), равном -90°, угол падения ЛВ на плоскость ВПП равен

Таким образом, при сканировании антенны по азимуту в секторе ±90° относительно оси ЛА абсолютное значение угла падения ЛВ на плоскость ВПП изменяется в пределах от μ' до μ''.
Значение μ в промежуточных положениях антенны по азимуту можно представить в виде суммы из трех слагаемых (см. Фиг.4)



где 
При изменении азимутального угла антенны γ от 0° до 90° абсолютное значение x изменяется от нуля до r, а значение y - от ψ до нуля. Аппроксимируя зависимости x и y от γ синусоидальным и косинусоидальным законами соответственно, из уравнений 8-13 находим

ДСЛВ в направлении оси ЛА равна

где S=arc sin(sin q·cos r).
ДСЛВ в направлении азимутального угла γ равна

Из выражений (6), (15), (16) находим, что зависимость разности ДССЛВ, приведенной к ЦМ, от азимутального угла γ при заданном значении угла крена r определяется выражением

из которого следует, что при наличии крена ЛА имеет место перекос метки ССЛВ относительно изображения начала ВПП или какой-либо метки шкалы дальности.
При фиксированных значениях r, γ, q величина в фигурных скобках выражения (17) (обозначим ее как В) постоянна. Из рассмотрения фиг.2 следует, что

Обозначив М=В·sin q, находим

Следовательно, абсолютное значение этой разности уменьшается пропорционально дальности до начала ВПП. Таким образом, если мы изменяем масштаб экрана монитора так, чтобы размер РЛ изображения на нем увеличивался обратно пропорционально расстоянию до ВПП, то перекос метки ССЛВ, который видит пилот при наличии крена, остается постоянным во всем диапазоне дальностей.
Например, при величине сектора сканирования по азимуту ±15 град, величине крена 1 град (левый крен), угле наклона глиссады 3 град и расстоянии до начала ВПП 1910,73 м (высота глиссады 100 м), разность дальностей ССЛВ в крайних и среднем положениях антенны составляет 179,54 м при правом положении антенны) и 152,13 м при левом положении антенны, т.е. 331,67 м на ширину экрана монитора (при увеличении дальности эта разность возрастает).
Сигнал дальности ССЛВ поступает также на вход БФСОВЦМ 5, на второй вход которого поступает сигнал заданного значения угла глиссады - q, выполненный, например, на спецвычислителе, осуществляющем вычисление по формуле

где Нс - значение относительной высоты ЦМ (ОВЦМ).
Сигнал ОВЦМ поступает далее на третий вход БФСУК 7, где, например, изображается на экране индикатора или монитора в виде метки, расположенной на дальности, соответствующей ОВЦМ, и (или) передается далее на автопилот.
В БФСАУ 6, выполненном, например, на трех сумматорах и двух компараторах, причем в первом сумматоре осуществляется вычитание из сигнала курсового угла ЛА-α, поступающего на первый вход БФСАУ от курсового датчика ЛА, сигнала заданного посадочного курса ВПП-β, поступающего на второй вход блока с пульта управления, во втором сумматоре из полученного результата - (α-β) вычитается сигнал азимутального угла антенны - γ, поступающий на четвертый вход блока с выхода датчика азимутальных углов антенны 1. Результирующий сигнал относительного азимутального угла (ОАУ) - (α-β-γ) с первого выхода БФСАУ подается на четвертый вход БФСУК и на вход первого компаратора. В первом компараторе значение сигнала с выхода второго сумматора сравнивают по модулю текущее значение сигнала относительного азимутального утла (ОАУ) антенны с заданным значением сигнала половинной величины сектора сканирования антенны - Δ, поступающим на третий вход БФСАУ, и в момент их совпадения вырабатывают сигнал реверса антенны, выдаваемый с третьего выхода БФСАУ на вход реверса антенны.
Этим обеспечивается симметричное расположение сектора обзора относительно заданного посадочного курса ВПП и, следовательно, относительно оси ВПП (при движении самолета вблизи оси ВПП) независимо от его угловых эволюции.
Во втором компараторе осуществляется сравнение сигнала азимутального угла антенны - γ с нулевым значением и в момент их совпадения со второго выхода БФСАУ выдается сигнал относительного курса ЛА на пятый вход БФСУК.
Недостатком этого варианта способа является то, что в выработанной по нему посадочной информации отсутствует сигнал производной отклонения ЦМ ЛА в вертикальной плоскости от заданной посадочной траектории, в результате чего о скорости отклонения можно судить лишь через несколько секунд после ее возникновения.
Целью изобретения является формирование сигнала производной отклонения ЦМ ЛА от заданной траектории практически без задержки во времени.
Цель достигается тем, что в способе автономного формирования посадочной информации для летательного аппарата, включающем одновременно радиолокационный обзор в секторе передней полусферы с регистрацией информации в координатах "угол азимута-дальность", вычитание из сигнала курса летательного аппарата, поступающего от курсовой системы, сигнала заданного посадочного курса взлетно-посадочной полосы и сигнала азимутального угла антенны и формирование, тем самым, сигнала относительного азимутального угла и сигнала нулевого относительного курса, измерение асимметрии изображения взлетно-посадочной полосы относительно радиальной линии путем анализа отображения радиолокационной информации и формирование, тем самым, сигнала отклонения летательного аппарата от оси взлетно-посадочной полосы в горизонтальной плоскости, измерение дальностей до подстилающей поверхности в направлении линии визирования, установленной по оси наклона под углом места, равным углу наклона глиссады к плоскости горизонта, для данного типа летательного аппарата, и стабилизированной по тангажу, и формирование, тем самым, сигнала дальности следа линии визирования, вычитание из текущего значения сигнала дальности следа линии визирования значения функции от угла тангажа, учитывающей заданные значения угла глиссады, и разности относительных координат центра масс и антенны радиолокатора, при текущем значении угла тангажа, поступающего от датчика вертикали, фильтрование полученного сигнала разности, формирование, тем самым, сигнала сглаженной дальности следа линии визирования, приведенной к центру масс летательного аппарата, вычитание из этого сигнала сигнала дальности до начала взлетно-посадочной полосы, полученного из анализа отображения радиолокационной информации, и формирование, тем самым, сигнала отклонения от глиссады летательного аппарата в вертикальной плоскости, умножение текущего значения сигнала сглаженной дальности следа линии визирования, приведенной к центру масс, на принятое значение функции от заданного угла глиссады и формирование, тем самым, сигнала относительной высоты центра масс летательного аппарата, задерживают сигнал относительной высоты центра масс на постоянный интервал времени, вычитают из значения задержанного сигнала текущее значение сигнала относительной высоты центра масс, делят результат на интервал времени задержки, сравнивают значение сигнала полученной скорости с заданным для текущего значения сигнала относительной высоты центра масс значением скорости и формируют, тем самым, сигнал производной вертикального отклонения летательного аппарата от заданной траектории для чего в бортовой радиолокатор для формирования посадочной информации, содержащий антенну, приемо-передающий блок (ППБ), дальномер, блок приведения к центру масс и фильтрации (БПЦМФ), блок формирования сигнала относительной высоты центра масс (БФСОВЦМ), блок формирования сигналов азимутальных углов (БФСАУ), блок формирования сигналов управления и контроля (БФСУК), причем выход-вход суммарного канала ППБ соединен с входом-выходом суммарного канала антенны, разностный выход которой соединен с разностным входом ППБ, выход сигнала отношения разностного сигнала к суммарному которого соединен с входом дальномера, выход суммарного сигнала ППБ соединен с первым входом, а выход синхросигнала - с седьмым входом БФСУК, выход дальномера соединен с первым входом БПЦМФ, второй вход которого является входом сигнала тангажа, третий вход - входом сигнала заданного значения угла глиссады, выход которого соединен с первым входом БФСОВЦМ, второй вход которого является входом сигнала заданного значения угла глиссады, и вторым входом БФСУК, третий вход которого соединен с выходом БФСОВЦМ, четвертый вход соединен с первым выходом БФСАУ, пятый - с вторым выходом БФСАУ, шестой вход является входом сигнала тангажа, третий выход БФСАУ соединен с входом сигнала реверса антенны, первый вход БФСАУ является входом сигнала курса летательного аппарата, второй - сигнала посадочного курса, третий - заданного значения величины сектора сканирования антенны, четвертый - сигнала азимутального угла антенны, введен блок измерения производной вертикального отклонения (БИПВО), причем его вход подключен к выходу БФСОВЦМ, а выход - к восьмому входу БФСУК.
На фиг.5 представлена функциональная схема бортового радиолокатора (РЛ), реализующего данный способ, где 1 - антенна, 2 - ППБ, 3 - дальномер, 4 - БПЦМФ, 5 - БФСОВЦМ, 6 - БФСАУ, 7 - БФСУК, 8-БИПВО.
Сущность способа поясняется на примере работы этого радиолокатора.
Отличие в работе данного РЛ от РЛ, представленного на фиг.1, заключается в том, что сигнал ОВЦМ с выхода БФСОВЦМ поступает также на вход БИПВО, выполненного, например, по схеме, представленной на фиг.6, где 1 - узел задержки (УЗ), 2 - первый сумматор (Σ-1), 3 - делитель (Д), 4 - второй сумматор (Σ-2), 5 - регистр (Р). В БИПВО этот сигнал задерживается на постоянный интервал времени в УЗ 1 и вычитается из текущего значения этого сигнала в Σ-1 2, полученная разность делится в делителе Д 3 на величину, равную интервалу времени задержки, полученное значение сигнала сравнивается в Σ-2 с сигналом значения заданной функции от ОВЦМ, поступающим в него из Р 5, при текущем значении ОВЦМ, сигнал которого приходит на вход Р 5 одновременно с приходом на вход Σ-1 2. Заданная функция от ОВЦМ, например, является постоянной величиной, равной заданной вертикальной скорости снижения при значении ОВЦМ, превышающем значение номинальной высоты ТНВ, и переходить в экспоненту с асимптотой на уровне ВПП так, чтобы ее значение в точке пересечения с уровнем высоты ЦМ в положении ЛА на стоянке соответствовало номинальной вертикальной скорости касания для данного типа ЛА. Выходной сигнал БИПВО, поступающий на восьмой вход БФСУК, изображается на мониторе последнего и (или) направляется в автопилот.
Недостатком известных способов автономного формирования посадочной информации является то, что правильное положение ДНА РЛ по углу места а, следовательно, и достоверная информация о вертикальном отклонении ЛА от ЗТП, обеспечивается только за счет надежности датчика вертикали ЛА. Поэтому на ЛА, не имеющих высоконадежного датчика вертикали, или на ЛА, к которым предъявляются повышенные требования по безопасности полетов (аэробусы, правительственные ЛА и т.п.) вероятность правильного формирования информации о вертикальном отклонении от ЗТП может оказаться недостаточно высокой.
Целью изобретения является повышение вероятности правильного формирования посадочной информации.
Цель достигается тем, что в способе автономного формирования посадочной информации для летательного аппарата, включающем одновременно радиолокационный обзор в секторе передней полусферы с регистрацией информации в координатах "угол азимута-дальность", вычитание из сигнала курса летательного аппарата, поступающего от курсовой системы, сигнала заданного посадочного курса взлетно-посадочной полосы и сигнала азимутального угла антенны и формирование, тем самым, сигнала относительного азимутального угла и сигнала нулевого относительного курса, измерение асимметрии изображения взлетно-посадочной полосы относительно радиальной линии путем анализа отображения радиолокационной информации и формирование, тем самым, сигнала отклонения летательного аппарата от оси взлетно-посадочной полосы в горизонтальной плоскости, измерение дальностей до подстилающей поверхности в направлении линии визирования, установленной по оси наклона под углом места, равным углу наклона глиссады к плоскости горизонта, для данного типа летательного аппарата, и стабилизированной по тангажу, и формирование, тем самым, сигнала дальности следа линии визирования, вычитание из текущего значения сигнала дальности следа линии визирования значения функции от угла тангажа, учитывающей заданные значения угла глиссады, и разности относительных координат центра масс и антенны радиолокатора, при текущем значении угла тангажа, поступающего от датчика вертикали, фильтрации полученного сигнала разности, и формирование, тем самым, сигнала сглаженной дальности следа линии визирования, приведенной к центру масс летательного аппарата, вычитание из этого сигнала сигнала дальности до начала взлетно-посадочной полосы, полученного из анализа отображения радиолокационной информации, и формирование, тем самым, сигнала отклонения от глиссады летательного аппарата в вертикальной плоскости, умножение текущего значения сигнала сглаженной дальности следа линии визирования на принятое значение функции от заданного угла глиссады и формирование, тем самым, сигнала относительной высоты центра масс, измеряют дальность до подстилающей поверхности также в направлении одной или нескольких дополнительных линий визирования, установленных по оси наклона под углами места, отличающимися от угла наклона глиссады к плоскости горизонта, вычитают из текущего значения сигнала дальности дополнительной линии визирования значения той же самой функции от угла тангажа, что используется для работы с основной линией визирования, установленной под углом глиссады, при текущем значении сигнала тангажа, фильтруют полученный сигнал разности и формируют, тем самым, сигнал сглаженной дальности следа дополнительной линии визирования, приведенной к центру масс летательного аппарата, умножают текущее значение этого сигнала на значение функции от заданного значения угла места для дополнительной линии визирования и формируют, тем самым, сигнал дополнительной относительной высоты центра масс, производят сравнение значения полученного сигнала с значением основного сигнала относительной высоты центра масс, для чего в бортовой радиолокатор для формирования посадочной информации, содержащий антенну, приемо-передающий блок (ППБ), первый дальномер (Д-1), первый блок приведения к центру масс и фильтрации (БПЦМФ-1), первый блок формирования сигнала относительной высоты центра масс (БФСОВЦМ-1), блок формирования сигналов азимутальных углов (БФСАУ), блок формирования сигналов управления и контроля (БФСУК), причем выход-вход суммарного канала ППБ соединен с входом-выходом суммарного канала антенны, разностный выход которой соединен с разностным входом ППБ, выход сигнала отношения разностного сигнала к суммарному которого соединен с входом первого дальномера Д-1, выход суммарного сигнала ППБ соединен с первым входом, а выход синхросигнала - с седьмым входом БФСУК, выход дальномера соединен с первым входом БПЦМФ-1, второй вход которого является входом сигнала тангажа, третий вход - входом сигнала заданного значения угла глиссады, выход которого соединен с первым входом БФСОВЦМ-1, второй вход которого является входом сигнала заданного значения угла глиссады, и вторым входом БФСУК, третий вход которого соединен с выходом БФСОВЦМ-1, четвертый вход соединен с первым выходом БФСАУ, пятый - с вторым выходом БФСАУ, шестой вход является входом сигнала тангажа, третий выход БФСАУ соединен с входом сигнала реверса антенны, первый вход БФСАУ является входом сигнала курса летательного аппарата, второй - сигнала посадочного курса, третий - заданного значения угла сканирования антенны, четвертый - сигнала азимутального угла антенны, введены последовательно включенные второй дальномер (Д-2), второй блок приведения к центру масс и фильтрации (БПЦМФ-2), второй блок формирования сигнала относительной высоты центра масс (БФСОВЦМ-2), причем вход Д-2 подключен к выходу сигнала отношения разностного сигнала к суммарному ППБ, второй вход БПЦМФ-2, является входом сигнала тангажа, третий вход - входом сигнала заданного значения угла места дополнительной линии визирования, а выход подключен к входу БФСОВЦМ-2, второй вход которого является входом сигнала заданного значения угла места дополнительной линии визирования, а выход подключен к девятому входу БФСУК.
Способ базируется на том, что все ВПП и посадочные площадки практически лежат в горизонтальных плоскостях.
Сущность способа поясняется на примере работы радиолокатора для его осуществления, функциональная схема которого представлена на фиг.7, где 1 - антенна, 2 - ППБ, 3 - Д-1, 4 - БПЦМФ, 5 - БФСОВЦМ, 6 - БФСАУ, 7 - БФСУК, 8 - Д-2, 9 - БПЦМФ-2, 10 - БФСОВЦМ-2.
Отличие в работе данного РЛ от РЛ, представленного на фиг.1, заключается в том, что сигнал величины отношения разностного сигнала к суммарному с выхода ППБ поступает также на вход Д-2 8, в котором измеряется дальность до подстилающей поверхности в направлении дополнительной ЛВ (ДЛВ), сдвинутой на угол Δ по углу места по отношению к основной ЛВ (ОЛВ), значение которого поступает на второй вход Д-2. Полученный сигнал поступает на первый вход БПЦМФ-2, в котором вычитают из текущего значения сигнала дальности дополнительной линии визирования значение той же самой функции от угла тангажа, что используется для работы с основной линией визирования, установленной под углом глиссады, при текущем значении сигнала тангажа (см. формулу 6), но при значении аргумента, равном заданному значению угла места для дополнительной линии визирования (q-Δ'), сигнал которого поступает на третий вход БПЦМФ-2, и текущем значении сигнала угла тангажа - p, поступающего на второй вход БПЦМФ-2, фильтруют полученный сигнал и формируют, тем самым, сигнал сглаженной дальности следа дополнительной линии визирования, приведенной к центру масс летательного аппарата. Полученный сигнал поступает далее на первый вход БФСОВЦМ-2, где умножают текущее значение этого сигнала на значение функции от заданного значения угла места для дополнительной линии визирования, например на sin (q-Δ'), значение аргумента которой - (q-Δ') поступает на второй вход БФСОВЦМ-2, и формируют, тем самым, сигнал дополнительной относительной высоты центра масс (ДОВЦМ), поступающий далее на девятый вход БФСУК, на восьмой вход которого поступает сигнал основной относительной высоты ЦМ (ООВЦМ), где производят сравнение этих сигналов, например, следующим образом.
На фиг.8 изображены основная и дополнительная линии визирования в нормальном и сдвинутом на угол λ положении, приведенные к ЦМ,
где Do - дальность следа основной ЛВ (ДСОЛВ) в нормальном положении;
Dd - дальность следа дополнительной ЛВ (ДСДЛВ) в нормальном положении;
Do', Dd' - ДСОЛВ и ДСДЛВ, сдвинутые на угол λ соответственно;
Hf - фактическая относительная высота ЦМ ЛА.
Из рассмотрения фиг.8 следует, что ООВЦМ, равная

и ДОВЦМ, равная

в нормальном положении ЛВ по углу места равны фактической высоте ЦМ ЛА - Hf

При наличии ошибки в системе стабилизации антенны по углу места, равной λ, сигналы ООВЦМ и ДОВЦМ соответственно приобретают значения, равные

а значения сигналов ДСОЛВ и ДСДЛВ соответственно равны

из выражений (21)-(25) находим

Таким образом, может быть сформирован сигнал ошибки системы стабилизации ДНА

равный нулю при отсутствии ошибки и отличный от нуля по величине и знаку при ее наличии, который может быть выдан на монитор БФСУК для использования пилотом и (или) в систему стабилизации антенны РЛ для автоматической коррекции.
Максимальная относительная погрешность измерения дальности до подстилающей поверхности в заданном направлении моноимпульсным способом равна (см. фиг.9)

где Dd'=Hf/sin(q-Δ'-λ);
Dd''=Hf/sin(q-Δ'-λ-3σ),
где σ - СКО ошибки измерения Dd'.
Для малых значений углов можем принять

При отношении сигнал/шум около 30 дБ значение 3σ для единичного измерения можно принять равным 1/20 ширины ДНА в вертикальной плоскости.
Для значений
q=3 град (0,0523 рад); Δ'=1 град (0,0175 рад); λ=0,5 град (0.0087 рад); 3σ=0.15 град (0,0031 рад) из (14) находим 3Σ=0,189.
Следовательно, в этом случае максимальная погрешность единичного измерения ОВЦМ равна
Hf·3Σ=0,189 Hf метров.
Таким образом, чтобы погрешность измерения отклонения ЛВ от заданного положения снизить до величины 0.0189Н, т.е. обнаруживать отклонения ЛВ в 0,1 град, необходимо усреднять измерение ОВЦМ на 100 тактах частоты повторения РЛ.
Частота повторения РЛ при этом определится как

где N - число независимых измерений (тактов частоты повторения);
ω - угловая скорость сканирования антенны;
ϕ - величина сектора усреднения.
При ω=100 град/сек; ϕ=2 град; N=100, Fp=100·100/2=5000 Гц.
Недостатком известных способов является отсутствие информации о высоте ЦМ ЛА над подстилающей поверхностью, что может привести в результате изменения угла тангажа, например на этапе выравнивания, к появлению ложной информации о скорости снижения и высоте ЦМ ЛА над подстилающей поверхностью. Это происходит потому, что вращение ЛА в вертикальной плоскости осуществляется вокруг его ЦМ. При этом увеличивается или уменьшается высота антенны, расположенной в носовой части ЛА, относительно высоты ЦМ.
Целью изобретения является формирование сигнала, несущего информацию о высоте ЦМ ЛА над подстилающей поверхностью.
Цель достигается тем, что в способе автономного формирования посадочной информации для летательного аппарата, включающем одновременно радиолокационный обзор в секторе передней полусферы с регистрацией информации в координатах "угол азимута-дальность", вычитание из сигнала курса летательного аппарата, поступающего от курсовой системы, сигнала заданного посадочного курса взлетно-посадочной полосы и сигнала азимутального угла антенны и формирование, тем самым, сигнала относительного азимутального угла и сигнала нулевого относительного курса, измерение асимметрии изображения взлетно-посадочной полосы относительно радиальной линии путем анализа отображения радиолокационной информации и формирование, тем самым, сигнала отклонения летательного аппарата от оси взлетно-посадочной полосы в горизонтальной плоскости, измерение дальностей до подстилающей поверхности в направлении линии визирования, установленной по оси наклона под углом места, равным углу наклона глиссады к плоскости горизонта, для данного типа летательного аппарата, и стабилизированной по тангажу, и формирование, тем самым, сигнала дальности следа линии визирования, измеряют дальность до переднего фронта ближайшего внешнего отраженного сигнала и формируют сигнал высоты радиолокатора, суммируют значение полученного сигнала с значением функции от угла тангажа, учитывающей, разность относительных координат центра масс летательного аппарата и антенны радиолокатора, при текущем значении сигнала угла тангажа, поступающего от датчика вертикали, фильтруют полученный сигнал и формируют, тем самым, сигнал высоты центра масс летательного аппарата, для чего в бортовой радиолокатор для формирования посадочной информации, содержащий антенну, приемо-передающий блок (ППБ), первый дальномер (Д 1), первый блок приведения к центру масс и фильтрации (БПЦМФ-1), блок формирования сигналов азимутальных углов (БФСАУ), блок формирования сигналов управления и контроля (БФСУК), причем выход-вход суммарного канала приемо-передающего блока соединен с входом-выходом суммарного канала антенны 1, разностный выход которой соединен с разностным входом ППБ 2, выход суммарного сигнала соединен с первым входом БФСУК, выход сигнала отношения разностного сигнала к суммарному соединен с входом Д-1, а выход синхросигнала - с его вторым входом и с седьмым входом БФСУК, выход Д-1 соединен с первым входом БПЦМФ-1, второй вход которого является входом сигнала тангажа, третий вход - входом сигнала заданного значения угла глиссады, а выход соединен с вторым входом БФСУК, четвертый вход которого соединен с первым выходом БФСАУ, пятый - с вторым выходом этого блока, шестой вход является входом сигнала тангажа, третий выход БФСАУ соединен с входом сигнала реверса антенны, первый вход БФСАУ является входом сигнала курса летательного аппарата, второй - сигнала посадочного курса, третий - заданного значения величины сектора сканирования антенны, четвертый - сигнала азимутального угла антенны, введены соединенные последовательно второй дальномер (Д-2), второй блок приведения к центру масс и фильтрации (БПЦМФ-2), причем выход сигнала суммарного канала ППБ соединен с первым входом Д-2, а выход синхросигнала - с вторым входом Д-2, второй вход БПЦМФ-2 является входом сигнала тангажа, выход которого соединен с десятым входом блока формирования сигналов управления и контроля.
Сущность способа поясняется на примере работы радиолокатора для его осуществления, функциональная схема которого представлена на фиг.10, где 1 - антенна, 2 - ППБ, 3 - Д-1, 4 - БПЦМФ-1, 5 - БФСАУ, 6 - БФСУК, 7 - Д-2, 8 - БПЦМФ-2. Отличие в работе данного РЛ от РЛ, представленного на фиг.1, заключается в том, что сигнал с выхода суммарного канала ППБ 2 поступает также на первый вход Д-2 7, в котором измеряется расстояние до переднего фронта ближайшего отраженного сигнала, например путем диффернцирования этого сигнала и измерения дальности до максимума первого положительного импульса с выхода дифференцирующей цепочки, и формируется сигнал высоты РЛ. Этот сигнал поступает далее на первый вход БПЦМФ-2 8, где из его величины вычитают значение функции от текущего значения угла тангажа, поступающего на второй вход этого блока от датчика вертикали, и формируют сигнал высоты ЦМ над подстилающей поверхностью в соответствии с формулой (см. фиг.2)

(или ее приближенным вариантом)
где На - дальность высоты РЛ;
Нс - дальность ЦМ ЛА;
l, h - разность координат ЦМ и антенны РЛ по оси абсцисс и ординат соответственно в локальной системе координат ЛА;
p - текущий угол тангажа,
а также выполняют фильтрацию, в результате которой осуществляется его сглаживание на интервале времени, например одной десятой периода обзора (скана).
В другом варианте осуществления данного способа в бортовой радиолокатор для формирования посадочной информации, содержащий первую антенну (А-1), передатчик (П), циркулятор (Ц), приемник (ПР), первый и второй переключатели (ПЕ-1), (ПЕ-2), вторую антенну (А-2), направленный ответвитель (НО), первый дальномер (Д-1), первый блок приведения к центру масс и фильтрации (БПЦМФ-1), блок формирования сигналов азимутальных углов (БФСАУ), блок формирования сигналов управления и контроля (БФСУК), причем выход П через Ц соединен с входом-выходом суммарного канала А-1, выход А-2 соединен с входом НО, включенного между выходом П-1 и входом суммарного канала ПР, сигнальный вход П-1 соединен со вторым выходом Ц, а вход управляющего сигнала - с выходом синхросигнала П, вход ПЕ-2 соединен с выходом разностного канала А-1, выход - с входом разностного сигнала ПР, а вход управляющего сигнала - с выходом синхросигнала П, выход суммарного канала ПР соединен с первым входом БФСУК, выход сигнала отношения разностного сигнала к суммарному ПР соединен с входом Д-1, выход синхросигнала П соединен - с его вторым входом и с седьмым входом БФСУК, выход Д-1 соединен с первым входом БПЦМФ, второй вход которого является входом сигнала тангажа, третий вход - входом сигнала заданного значения угла глиссады, а выход соединен с вторым входом БФСУК, четвертый вход которого соединен с первым выходом БФСАУ, пятый - с вторым выходом этого блока, шестой вход является входом сигнала тангажа, третий выход БФСАУ соединен с входом сигнала реверса А-1, первый вход является входом сигнала курса летательного аппарата, второй - сигнала посадочного курса, третий - заданного значения величины сектора сканирования антенны, четвертый - сигнала азимутального угла антенны, введены соединенные последовательно Д-2, БПЦМФ-2, причем выход сигнала суммарного канала ПР соединен с первым входом Д-2, выход синхросигнала П - с вторым входом Д-2, второй вход БПЦМФ-2 является входом сигнала тангажа, выход которого соединен с десятым входом БФСУК.
Сущность способа поясняется на примере работы радиолокатора для его осуществления, функциональная схема которого представлена на фиг.11, где 1 - А-1, 2 - П, 3 - Ц, 4 - ПР, 5 - ПЕ-1, 6 - ПЕ-2, 7 - А-2, 8 - НО, 9 - Д-1, 10 - БПЦМФ-1, 11 - БФСАУ, 12 - БФСУК, 13 - Д-2, 14 - БПЦМФ-2.
В данном варианте осуществления способа обеспечивается прием отраженных сигналов практически с нулевой дальности независимо от длительности излучаемого импульса, что позволяет получать высокую разрешающую способность по дальности при низком уровне импульсной мощности передатчика за счет использования частотно-модулированого или фазово-манипулированного сигнала.
РЛ работает следующим образом.
Широкополосный высокочастотный сигнал с выхода П 2 через Ц 3 поступает на вход-выход суммарного канала А-1 1 и излучается в пространство, определяемое суммарной ДНА.
С небольшим упреждением относительно начала высокочастотного импульса со второго выхода П 2 выдается синхроимпульс на управляющие входы переключателей ПЕ-1 5 и ПЕ-2 6 для перевода их в выключенное состояние, а также на входы: ПР 4, для запуска схемы ВАРУ, Д-1 9, Д-2 13, БФСУК 12, для запуска развертки по дальности и генератора меток дальности.
Отраженные сигналы с выходов суммарного и разностного каналов антенны 1 начинают поступать на соответствующие входы приемника 4 только с момента открытия переключателей 5 и 6.
Поступление сигналов с выхода антенны 7 через направленный ответвитель 8 на вход суммарного канала приемника 4 не зависит от состояния переключателей 5 и 6. Этим обеспечивается работа РЛ в ближней зоне вплоть до нулевой дальности. При этом угловое разрешение и сканирование по азимуту осуществляется за счет передающей первой антенны 1.
Конструктивно антенна 7 может быть установлена на неподвижном основании. При этом она должна иметь ДН шириной около 100 град в вертикальной плоскости и 60-80 град в горизонтальной плоскости и соответственно раскрыв в диапазоне волн 3 см примерно 2,5-3,5 см.
Таким образом обеспечивается работа аппаратуры без мертвой зоны по дальности даже при излучении длинных зондирующих импульсов с частотной модуляцией.
В приемнике 4, выполненном, например, по схеме двухканального моноимпульсного приемника на УПЧ с идентичными логарифмическими характеристиками, осуществляется усиление, временная автоматическая регулировка усиления, сжатие сигналов по длительности (если необходимо), определение величины и знака отношения сигнала в разностном канале к сигналу в суммарном канале, детектирование раздельно по суммарному и разностному каналу. Если дальнейшая обработка сигналов ведется в цифровом виде, то в состав приемника включаются аналого-цифровые преобразователи.
Сигнал, характеризующий изменение во времени величины отношения сигналов в разностном и суммарном каналах приемника, поступает на вход первого дальномера 9, где осуществляется измерение дальности расположения заданной величины сигнала, определяемой в зависимости от выбранного направления линии визирования относительно оси ДНА и ее пеленгационной характеристики.
Так, если линия визирования совпадает с осью ДНА, установленной по наклону под углом, равным углу наклона глиссады к плоскости горизонта, а ось сканирования антенны по азимуту стабилизирована по тангажу (стабилизация по крену исключена), то измеряется дальность положения сигнала с минимальным значением абсолютной величины отношения сигналов в разностном и суммарном каналах.
Полученный таким образом сигнал с информацией о дальности (относительно антенны РЛ) пересечения линии визирования с подстилающей поверхностью для каждого периода частоты повторения РЛ поступает на вход БПЦМФ-1 10, на второй вход которого поступает сигнал текущего значения угла тангажа - p, а на третий - сигнал заданного значения угла глиссады - q, выполненного, например, на спецвычислителе, осуществляющем вычисление по формуле (6), вывод которой делается на основании рассмотрения фиг.2,
где Dc - дальность следа линии визирования от ЦМ ЛА;
Da - дальность следа линии визирования от антенны РЛ;
l, h - разность координат ЦМ и антенны РЛ по оси абсцисс и ординат соответственно в локальной системе координат ЛА;
q - заданный угол глиссады;
р - текущий угол тангажа.

Далее сигнал фильтруется, в результате чего осуществляется его сглаживание на интервале времени, например одной десятой периода обзора (скана). При сглаживании оставляются без изменения значения сигнала, имеющие резкие перепады в сторону меньших дальностей, так как это могут быть сигналы от препятствий, как на ВПП, так и в зоне подхода к ней.
Сформированный таким образом сигнал дальности сглаженного следа линии визирования (ССЛВ), приведенной к ЦМ ЛА, с выхода БПЦМФ-1 10 поступает на второй вход БФСУК 7, на первый вход которого поступает сигнал с выхода суммарного канала ПР 4, на седьмой - синхросигнал, например, представляющего собой индикатор, на экране которого изображают этот сигнал в виде линейной метки - ССЛВ на фоне остальной РЛ-информации, и (или) процессор, выполняющий обнаружение изображения ВПП и сравнение дальностей начала ВПП и ССЛВ и формирование, тем самым, сигнала вертикального отклонения ЛА от заданной траектории посадки (ЗТП) для автопилота.
Сигнал с суммарного выхода ПР 4 поступает на первый вход БФСУК 7, а также на первый вход Д-2 13, в котором измеряется расстояние до переднего фронта ближайшего отраженного сигнала, например путем дифференцирования этого сигнала и измерения дальности до максимума первого положительного импульса с выхода дифференцирующей цепочки, и формируется сигнал высоты РЛ. Этот сигнал поступает далее на первый вход БПЦМФ-2 14, где из его величины вычитают значение функции от текущего значения угла тангажа, поступающего на второй вход этого блока от датчика вертикали, и формируют сигнал высоты ЦМ над подстилающей поверхностью в соответствии с формулой (см. фиг.2)

(или ее приближенным вариантом)
где На - дальность высоты РЛ;
Нс - дальность ЦМ ЛА;
l, h - разность координат ЦМ и антенны РЛ по оси абсцисс и ординат соответственно в локальной системе координат ЛА;
p - текущий угол тангажа,
а также выполняют фильтрацию, в результате которой осуществляется его сглаживание на интервале времени, например одной десятой периода обзора (скана).
При движении самолета строго по прямолинейной глиссаде и отсутствии крена метка ССЛВ совмещена с изображением начала ВПП или радиолокационного ориентира, располагаемого вблизи начала ВПП.
Если изображение ВПП симметрично относительно любой радиальной (вертикальной) линии экрана индикатора, а эта линия не совпадает с меткой нулевого относительного курса (осевой линией экрана индикатора), то это означает, что в курсовой системе или в системе установки заданного посадочного курса существует систематическая ошибка, которая должна быть устранена соответствующим корректором, например корректором курсовой системы, путем совмещения метки нулевого относительного курса с осью симметрии изображения ВПП. Такую коррекцию можно осуществлять по любой прямолинейной протяженной цели с известным направлением по азимуту (шоссейная или железная дорога, просека, линия электропередачи и т.п.).
Недостатком известных способов является отсутствие информации о направлении вектора путевой скорости
Целью изобретения является формирование сигнала, несущего информацию о направлении линии пути ЦМ ДА, которая практически эквивалентна информации о производной отклонения ЛА в горизонтальной плоскости (боковой скорости ЛА относительно оси ВПП).
Цель достигается тем, что в способе автономного формирования посадочной информации для летательного аппарата, включающем одновременно радиолокационный обзор в секторе передней полусферы с регистрацией информации в координатах "угол азимута-дальность", вычитание из сигнала курса летательного аппарата, поступающего от курсовой системы, сигнала заданного посадочного курса взлетно-посадочной полосы и сигнала азимутального угла антенны и формирование, тем самым, сигнала относительного азимутального угла и сигнала нулевого относительного курса, измерение асимметрии изображения взлетно-посадочной полосы относительно радиальной линии путем анализа отображения радиолокационной информации и формирование, тем самым, сигнала отклонения летательного аппарата от оси взлетно-посадочной полосы в горизонтальной плоскости, измерение дальностей до подстилающей поверхности в направлении линии визирования, установленной по оси наклона под углом места, равным углу наклона глиссады к плоскости горизонта, для данного типа летательного аппарата, и стабилизированной по тангажу, и формирование, тем самым, сигнала дальностей следа линии визирования, измеряют среднее значение отношений средних значений амплитуд отраженных сигналов на одинаковых интервалах дальностей и значение сигнала азимутального угла в текущем и одном из предыдущих тактах частоты повторения радиолокатора, находят зависимость указанных средних значений от указанных углов и формируют сигнал линии пути - азимутальный угол антенны, при котором указанная зависимость имеет минимум, для чего в бортовой радиолокатор для формирования посадочной информации, содержащий антенну 1, приемо-передающий блок (ППБ) 2, дальномер 3, причем выход-вход суммарного канала ППБ 2 соединен с входом-выходом суммарного канала антенны 1, разностный выход которой соединен с разностным входом ППБ 2, выход сигнала отношения разностного сигнала к суммарному которого соединен с входом дальномера 3, блок приведения к центру масс и фильтрации (БПЦМФ) 4, блок формирования сигналов азимутальных углов (БФСАУ) 5, блок формирования сигналов управления и контроля (БФСУК) 6, причем выход суммарного сигнала ППБ 2 соединен с первым входом, а выход синхросигнала - с седьмым входом БФСУК 6, выход дальномера 3 соединен с первым входом БПЦМФ 4, второй вход которого является входом сигнала тангажа, выход которого соединен с вторым входом БФСУК 6, четвертый вход которого соединен с первым выходом БФСАУ 5, пятый - с вторым выходом этого блока, шестой вход является входом сигнала тангажа, третий выход БФСАУ 5 соединен с входом сигнала реверса антенны 1, первый вход БФСАУ 6 является входом сигнала курса летательного аппарата, второй - сигнала посадочного курса, третий - заданного значения величины сектора сканирования антенны 1, четвертый вход соединен с выходом сигнала азимутального угла антенны 1, введен блок формирования сигнала линии пути (БФСЛП) 7, причем его первый вход подключен к выходу сигнала суммарного канала ППБ 2, второй вход - к выходу сигнала азимутального угла антенны 1, третий вход - к четвертому выходу БФСАУ 5, а выход - к одиннадцатому входу БФСУК 6.
Данный способ базируется на том, что при ДНА, установленной в направлении линии пути, ширина спектра отраженных сигналов становится минимальной вследствие равенства доплеровских частот в левой и правой половинах ДНА. Это обстоятельство приводит к минимальной частоте биений отраженного сигнала, т.е. к минимальному изменению амплитуды отраженных сигналов на одной и той же дальности в соседних тактах частоты повторения РЛ.
Сущность способа поясняется на примере работы радиолокатора для его осуществления, функциональная схема которого представлена на фиг.12, где 1 - антенна, 2 - ППБ, 3 - дальномер, 4 - БПЦМФ, 5 - БФСАУ, 6 - БФСУК, 7 - БФСЛП.
Отличие в работе данного РЛ от РЛ, представленного на фиг.1, заключается в том, что сигнал с суммарного выхода ППБ поступает также на вход БФСЛП, содержащий, например, последовательно-включенные узел логарифмирования (УЛ) 1, первый фильтр (Ф-1) 2, дискретизатор (ДИС) 3, узел задержки (УЗ) 4, первый сумматор (Σ-1) 5, делитель (Д) 6, второй фильтр (Ф-2) 7, второй сумматор (Σ-2) 8, регистр (Р) 9, логическое устройство (ЛУ) 10, третий сумматор (Σ-3) 11 (см. фиг.13).
В УЛ 1 сигнал логарифмируется, затем сглаживается в Ф-1 2, и поступает на вход ДИС 3, где дискретизируется на n интервалов по дальности длительностью τ, полученная последовательность поступает одновременно на первый вход Σ-1 5 и вход узла задержки УЗ 4, например, на время одного периода частоты повторения РЛ, с выхода которого поступает на второй вход Σ-1 5, в котором производится вычисление в соответствии с выражением

Полученный сигнал поступает на вход Д 6, где делится на n, далее фильтруется в Ф-2 7 и формируется сигнал

который поступает на вход аторого сумматора Σ-2 8, где вычисляется абсолютное значение разности осуществляется формирование сигнала, несущего информацию о направлении линии пути ЦМ ЛА, которая практически эквивалентна информации о производной отклонения ЛА в горизонтальной плоскости (боковой скорости ЛА относительно оси ВПП).

Далее сигнал поступает на первый вход регистра Р 9, на второй вход которого поступает сигнал текущего азимутального угла антенны γ, где формируется сигнал зависимости

поступающий на вход ЛУ 10, в котором находится значение γ, при котором эта зависимость имеет минимум в данном скане. В Σ-3 11 полученный сигнал γmin суммируется с сигналом разности текущего значения курса ЛА и заданного посадочного курса ВПП - (α-β) и формируется сигнал линии пути - (α-β-γmin), поступающий на одиннадцатый вход БФСУК 7.
Недостатком известных способов представления полетной информации на экране монитора является недостаточно удобное для восприятия пилотом представление информации о высоте ЦМ ЛА.
Целью изобретения является формирование такого изображения на экране монитора, которое позволит пилоту на этапе выравнивания более точно оценивать высоту ЦМ ЛА относительно плоскости ВПП, а также отклонение скорости изменения этой высоты относительно заданной скорости.
Цель достигается тем, что в способе автономного формирования посадочной информации для летательного аппарата, включающем одновременно радиолокационный обзор в секторе передней полусферы с регистрацией информации в координатах "угол азимута-дальность", и представление ее на экране монитора, вычитание из сигнала курса летательного аппарата, поступающего от курсовой системы, сигнала заданного посадочного курса взлетно-посадочной полосы и сигнала азимутального угла антенны и формирование, тем самым, сигнала относительного азимутального угла и сигнала нулевого относительного курса и изображение его на экране монитора в виде радиальной линии, измерение асимметрии изображения взлетно-посадочной полосы относительно радиальной линии путем анализа отображения радиолокационной информации и формирование, тем самым, сигнала отклонения летательного аппарата от оси взлетно-посадочной полосы в горизонтальной плоскости, измерение дальностей до подстилающей поверхности в направлении линии визирования, установленной по оси наклона антенны под углом места, равным углу наклона глиссады к плоскости горизонта, для данного типа летательного аппарата, и стабилизированной по тангажу, и формирование, тем самым, сигнала дальности следа линии визирования, вычитание из текущего значения сигнала дальности следа линии визирования значения функции от угла тангажа, учитывающей заданные значения угла глиссады, и разности относительных координат антенны радиолокатора и центра масс летательного аппарата, при текущем значении угла тангажа, поступающего от датчика вертикали, фильтрование полученного сигнала разности, и формирование, тем самым, сигнала сглаженной дальности следа линии визирования, приведенной к центру масс летательного аппарата, изображение этого сигнала на экране монитора в виде линейной метки - сглаженный след линии визирования, формирование сигнала высоты центра масс летательного аппарата как функции от текущего значения сигнала сглаженной дальности следа линии визирования, приведенной к центру масс летательного аппарата, и заданного значения угла глиссады и (или) измерение дальности до ближайшего внешнего отраженного сигнала, формирование сигнала высоты радиолокатора, формирование сигнала высоты центра масс как функции от текущих значений сигнала высоты радиолокатора и угла тангажа, учитывающей заданные значения относительных координат антенны радиолокатора и центра масс, и (или) формирование сигнала высоты центра масс как функции от текущих значений сигналов высотомера и угла тангажа, учитывающей значения разности относительных координат антенны высотомера и центра масс, представляют на экране монитора сигнал высоты центра масс летательного аппарата в виде метки или нескольких меток на фоне остальной радиолокационной информации, расположение которой по дальности соответствует значению сигнала высоты центра масс летательного аппарата в более крупном масштабе дальности, чем масштаб основной части радиолокационного изображения, формируют и отображают на экране монитора бегущий трек по дальности, скорость которого изменяют в заданной для данного типа летательного аппарата функции от значения сигнала высоты центра масс летательного аппарата.
Положение метки высоты ЦМ не зависит от азимутального угла антенны. Она, а также бегущий трек, скорость которого в масштабе изображения высоты изменяют в зависимости от значения этой высоты, расположены симметрично относительно радиальной метки нулевого относительного курса (оси экрана монитора), с которой должна быть совмещена ось симметрии изображения ВПП при отсутствии бокового отклонения ЛА от заданной траектории посадки. Таким образом, концентрируя внимание только на оси монитора пилот получает информацию, необходимую как для управления ЛА в горизонтальной, так и в вертикальной плоскостях. К моменту касания в этом же месте оказывается и метка относительного курса ЛА, независимо от угла сноса ЛА.
При изображении метки высоты в виде символа самолета или отрезка прямой, концы которого перемещают в противоположных направлениях по дальности в функции от длины половины этого отрезка и сигнала угла крена ЛА, поступающего от датчика вертикали, в этом же месте экрана пилот получает дополнительную информацию о крене ЛА.
Недостатком известных способов представления полетной информации на экране монитора является непривычное для восприятия пилотом представление информации об окружающей обстановке типа "земля-самолет".
Целью изобретения является формирование такого изображения на экране монитора, которое позволит пилоту получать информацию об окружающей обстановке радиолокационным способом наиболее приближенно к тому, как он ее видит при визуальной посадке, т.е. типа "самолет-земля".
Цель достигается тем, что в способе автономного формирования посадочной информации для летательного аппарата, включающем одновременно радиолокационный обзор в секторе передней полусферы с регистрацией информации в координатах "угол азимута-дальность" и представление ее на экране монитора, вычитание из сигнала курса летательного аппарата, поступающего от курсовой системы, сигнала заданного посадочного курса взлетно-посадочной полосы и сигнала азимутального угла антенны и формирование, тем самым, сигнала относительного азимутального угла и сигнала нулевого относительного курса и изображение его на экране монитора в виде радиальной линии, измерение асимметрии изображения взлетно-посадочной полосы относительно радиальной линии путем анализа отображения радиолокационной информации и формирование, тем самым, сигнала отклонения летательного аппарата от оси взлетно-посадочной полосы в горизонтальной плоскости, измерение дальностей до подстилающей поверхности в направлении линии визирования, установленной по оси наклона антенны под углом места, равным углу наклона глиссады к плоскости горизонта, для данного типа летательного аппарата, и стабилизированной по тангажу, и формирование, тем самым, сигнала дальностей следа линии визирования, изображение этого сигнала на экране монитора в виде линейной метки - след линии визирования, изменяют в каждом такте частоты повторения масштаб дальности радиолокационного изображения в обратной зависимости от значения сигнала дальности следа линии визирования в текущем направлении по азимуту в части сектора обзора, охватывающей взлетно-посадочную полосу на текущей дальности до нее.
При таком типе представления изображение ВПП располагается на одном и том же месте экрана монитора независимо от расстояния до нее и лишь увеличивается его ширина по мере приближения к ВПП примерно так же, как это происходит при визуальной посадке. При наличии крена ЛА происходит перекос изображения ВПП в направлении, противоположном крену примерно так же, как пилот это видит при визуальной посадке.
Недостатком известных способов представления полетной информации на экране монитора является отсутствие информации о тангаже ЛА в привычном для восприятия пилотом виде, т.е. так, как он ее видит при визуальной посадке.
Целью изобретения является формирование такого изображения на экране монитора, которое позволит пилоту получать информацию об окружающей обстановке радиолокационным способом, а также получать информацию о тангаже ЛА от датчика вертикали, наиболее приближенно к тому, как он ее видит при визуальной посадке, т.е. типа "самолет-земля".
Цель достигается тем, что в способе автономного формирования посадочной информации для летательного аппарата, включающем одновременно радиолокационный обзор в секторе передней полусферы с регистрацией информации в координатах "угол азимута-дальность", и представление ее на экране монитора, вычитание из сигнала курса летательного аппарата, поступающего от курсовой системы, сигнала заданного посадочного курса взлетно-посадочной полосы и сигнала азимутального угла антенны и формирование, тем самым, сигнала относительного азимутального угла и сигнала нулевого относительного курса и изображение его на экране монитора в виде радиальной линии, измерение асимметрии изображения взлетно-посадочной полосы относительно радиальной линии путем анализа отображения радиолокационной информации и формирование, тем самым, сигнала отклонения летательного аппарата от оси взлетно-посадочной полосы в горизонтальной плоскости, измерение дальностей до подстилающей поверхности в направлении линии визирования, установленной по оси наклона антенны под углом места, равным углу наклона глиссады к плоскости горизонта, для данного типа летательного аппарата, и стабилизированной по тангажу, и формирование, тем самым, сигнала дальностей следа линии визирования, формируют и изображают на экране монитора метку, обозначающую нулевое значение азимутального угла антенны и значение сигнала тангажа, поступающего от датчика вертикали, в координатах "азимут-тангаж", ось азимута которых совпадает с осью азимута координат "азимут-дальность".
При таком типе представления изображение ВПП при изменении тангажа и (или) курса ЛА перемещается относительно метки, выполненной в виде рамки, напоминающей обрамление лобового стекла кабины ЛА, так же как реальная ВПП перемещается относительно реального обрамления лобового стекла кабины ЛА.
Недостатком известных способов формирования посадочной информации является то, что в них отсутствует информация непосредственно о положении ЛА относительно начала ВПП или номинальной точки касания на последней части этапа выравнивания.
Целью изобретения является формирование сигнала, несущего дополнительную информацию о положении ЛА относительно заданной траектории посадки и одновременно дальности до второго радиолокационного ориентира.
Цель достигается тем, что в способе автономного формирования посадочной информации для летательного аппарата, включающем одновременно радиолокационный обзор в секторе передней полусферы с регистрацией информации в координатах "угол азимута-дальность", вычитание из сигнала курса летательного аппарата, поступающего от курсовой системы, сигнала заданного посадочного курса взлетно-посадочной полосы и сигнала азимутального угла антенны и формирование, тем самым, сигнала относительного азимутального угла и сигнала нулевого относительного курса, измерение асимметрии изображения взлетно-посадочной полосы относительно радиальной линии путем анализа отображения радиолокационной информации и формирование, тем самым, сигнала отклонения летательного аппарата от оси взлетно-посадочной полосы в горизонтальной плоскости, измерение дальностей до подстилающей поверхности в направлении линии визирования, установленной по оси наклона под углом места, равным углу наклона глиссады к плоскости горизонта, для данного типа летательного аппарата, и стабилизированной по тангажу, и формирование, тем самым, сигнала дальности следа линии визирования, вычитание из текущего значения сигнала дальности следа линии визирования значения функции от угла тангажа, учитывающей заданные значения угла глиссады, и разности относительных координат центра масс летательного аппарата и антенны радиолокатора, при текущем значении угла тангажа, поступающего от датчика вертикали, фильтрование полученного сигнала разности, формирование, тем самым, сигнала сглаженной дальности следа линии визирования, приведенной к центру масс летательного аппарата, вычитание из этого сигнала сигнала дальности до начала взлетно-посадочной полосы или первого радиолокационного ориентира, полученного из анализа отображения радиолокационной информации, и формирование, тем самым, сигнала отклонения от глиссады летательного аппарата в вертикальной плоскости, умножение текущего значения сигнала сглаженной дальности следа линии визирования, приведенной к центру масс, на принятое значение функции от заданного угла глиссады и формирование, тем самым, сигнала относительной высоты центра масс летательного аппарата, определяют зависимость наклонной дальности до второго радиолокационного ориентира, установленного дальше номинальной точки касания для данной взлетно-посадочной полосы, от значения высоты заданной траектории посадки летательного аппарата относительно плоскости взлетно-посадочной полосы, формируют сигнал дальности виртуального следа линии визирования для текущего значения относительной высоты центра масс, используя указанную зависимость, вычитают из значения этого сигнала текущее значение сигнала дальности до второго радиолокационного ориентира, полученного из анализа радиолокационной информации, и формируют, тем самым, сигнал отклонения центра масс летательного аппарата от заданной траектории посадки в вертикальной плоскости, для чего в бортовой радиолокатор для формирования посадочной информации, содержащий антенну, приемо-передающий блок (ППБ), дальномер (Д), блок приведения к центру масс и фильтрации (БПЦМФ), блок формирования сигнала относительной высоты центра масс (БФСОВЦМ), блок формирования сигналов азимутальных углов (БФСАУ), блок формирования сигналов управления и контроля (БФСУК), причем выход-вход суммарного канала ППБ соединен с входом-выходом суммарного канала антенны, разностный выход которой соединен с разностным входом ППБ, выход сигнала отношения разностного сигнала к суммарному которого соединен с входом дальномера, выход суммарного сигнала ППБ соединен с первым входом, а выход синхросигнала - с седьмым входом БФСУК, выход дальномера соединен с первым входом БПЦМФ, второй вход которого является входом сигнала тангажа, третий вход - входом сигнала заданного значения угла глиссады, выход которого соединен с первым входом БФСОВЦМ, второй вход которого является входом сигнала заданного значения угла глиссады, и вторым входом БФСУК, третий вход которого соединен с выходом БФСОВЦМ, четвертый вход соединен с первым выходом БФСАУ, пятый - с вторым выходом БФСАУ, шестой вход является входом сигнала тангажа, третий выход БФСАУ соединен с входом сигнала реверса антенны, первый вход БФСАУ является входом сигнала курса летательного аппарата, второй - сигнала посадочного курса, третий - заданного значения величины сектора сканирования антенны, четвертый - сигнала азимутального угла антенны, введен блок формирования сигнала виртуального следа линии визирования (БФСВСЛВ), причем его первый вход подключен к выходу БФСОВЦМ, второй вход является входом сигнала заданного значения расстояния от номинальной точки касания для данной ВПП до второго радиолокационного ориентира, а выход подключен к двенадцатому входу БФСУК.
Сущность способа поясняется на примере работы радиолокатора для его осуществления, функциональная схема которого представлена на фиг.14, где 1 - антенна, 2 - ППБ, 3 - дальномер, 4 - БПЦМФ, 5 - БФСАУ, 6 - БФСУК, 7 - БФСОВЦМ, 8 - БФСВСЛВ.
Отличие в работе этого РЛ от представленного на фиг.1 РЛ заключается в том, что сигнал ОВЦМ с выхода БФСОВЦМ поступает также на вход БФСВСЛВ, в котором производится вычисление дальности в соответствии с заложенной в нем функцией от высоты ЦМ ЛА, учитывающей также расстояние от второго РЛО до номинальной точки касания, заданное значение которого поступает на второй вход блока.
Зависимость наклонной дальности от высоты ЦМ над плоскостью ВПП при движении ЛА строго по заданной траектории может быть определена, например, следующим образом.
Заданную траекторию посадки (ЗТП) аппроксимируют ломаной линией. В этом случае ОВЦМ в точке конечного излома определится выражением (см. фиг.15)

где Ak - расстояние от заданной (номинальной) точки касания (ЗТК) до точки конечного излома ЗТП;
q' - угол наклона ЗТП на конечном участке, равный

где Vv - заданная вертикальная скорость в точке касания;
Va - номинальная воздушная скорость на посадке.
Наклонная дальность от ЦМ ЛА до второго радиолокационного ориентира (РЛО-2) в этой точке равна

где С - расстояние от (ЗТК) до РЛО-2.
Из 36-38 находим текущее значение Bk на этом участке ЗТП

где Ht - текущее значение высоты ЦМ над плоскостью ВПП.
Текущее значение наклонной дальности на (k-1)-м участке ЗТП равно

Где q'' - угол наклона ЗТП на (k-1)-м участке ЗТП, равный

где Ak-1 - расстояние от точки k-го излома до точки (k-1)-го излома ЗТП;

где Hk-1 - заданная ОВЦМ в точке (k-1)-го излома ЗТП.
Из выражений 36, 40-42 находим

Аналогично для i-го участка ЗТП, находим

При равенстве расстояний между точками изломов, равных А, из 44 находим

где К - количество изломов ЗТП.
Таким образом, если ЦМ ЛА движется строго по ЗТП, текущее значение наклонной дальности, вычисляемое по формуле 45 как функция от ОВЦМ, будет равно дальности до РЛО-2, приведенной к центру масс ЛА. При отклонении ОВЦМ от ЗТП значение сигнала ДВСЛВ соответственно увеличится или уменьшится относительно сигнала дальности до РЛО-2. Следовательно, разность этих сигналов является сигналом отклонения ЦМ ЛА от ЗТП. Этот сигнал с выхода БФСВСЛВ поступает на двенадцатый вход БФСУК, где изображается, например, в виде метки на экране монитора.
При сравнительно узком секторе азимутального сканирования антенны, симметричном относительно продольной оси самолета, и наличии большого угла сноса, возможно отклонение сектора сканирования от направления на ВПП.
Для устранения этого недостатка сравнивают модули текущего значения сигнала относительного азимутального угла (ОАУ) антенны - (α-β-γ), вырабатываемое в БФСАУ, с заданным значением сигнала половинной величины сектора сканирования антенны - Δ, поступающего на третий вход БФСАУ, и в момент их совпадения вырабатывают сигнал реверса антенны, выдаваемый с третьего выхода БФСАУ на вход реверса антенны.
Этим обеспечивается симметричное расположение сектора обзора относительно заданного посадочного курса ВПП и, следовательно, относительно оси ВПП (при движении самолета вблизи оси ВПП) независимо от его угловых эволюции.
Наличие такой системы слежения за направлением посадочного курса данной ВПП позволяет сузить до минимальной величины размер сектора сканирования (±10-15°) и получить, тем самым, приемлемую скорость возобновления информации даже при механическом сканировании антенны.
На фиг.1 представлена функциональная схема бортового радиолокатора для формирования посадочной информации, обеспечивающего формирование сигнала, несущего информацию об относительной высоте цента масс ЛА (ОВЦМ).
На фиг.2 представлен чертеж, поясняющий вывод формул для приведения сигнала дальности следа линии визирования и сигнала ОВЦМ ЛА к центру масс ЛА.
На фиг.3, 4 представлены чертежи, поясняющие принцип формирования сигнала, несущего информацию о крене ЛА.
На фиг.5 представлена функциональная схема бортового радиолокатора для формирования посадочной информации, обеспечивающего формирование сигнала, несущего информацию о производной отклонения ЛА от заданной траектории посадки (ЗТП).
На фиг.6 представлена функциональная схема блока измерения производной вертикального отклонения от ЗТП.
На фиг.7 представлена функциональная схема бортового радиолокатора для формирования посадочной информации, обеспечивающего формирование сигнала, несущего информацию о величине ошибки системы стабилизации линии визирования (ЛВ) по углу места.
На фиг.8, 9 представлены чертежи, поясняющие принцип формирования сигнала, несущего информацию о величине ошибки системы стабилизации ЛВ.
На фиг.10 представлена функциональная схема бортового радиолокатора для формирования посадочной информации, обеспечивающего формирование сигнала, несущего информацию о высоте центра масс ЛА над подстилающей поверхностью (ВЦМ).
На фиг.11 представлена функциональная схема второго варианта бортового радиолокатора для формирования посадочной информации, обеспечивающего формирование сигнала, несущего информацию о ВЦМ.
На фиг.12 представлена функциональная схема бортового радиолокатора для формирования посадочной информации, обеспечивающего формирование сигнала, несущего информацию о линии пути центра масс ЛА.
На фиг.13 представлена функциональная схема блока измерения и формирования сигнала линии пути.
На фиг.14 представлена функциональная схема второго варианта бортового радиолокатора для формирования посадочной информации, обеспечивающего формирование сигнала, несущего информацию об отклонении ЛА от ЗТП в вертикальной плоскости, а также дальности до второго радиолокационного ориентира (РЛО-2).
На фиг.15 представлен чертеж, поясняющий вывод формулы для определения зависимости наклонной дальности до РЛО-2 от высоты ЦМ ЛА над плоскостью ВПП, если ЦМ ЛА движется по ЗТП,
На фиг.16 представлен чертеж двухдиапазонного отражателя, работающего как в радиолокационном, так и в оптическом диапазонах.
БР, реализующий один или несколько из заявленных способов, обеспечивает независимо от метеоусловий выработку и представление на экране индикатора или универсального монитора в удобном для восприятия пилотом виде следующей информации, необходимой и достаточной для посадки ЛА при полном отсутствии видимости, а также выдачу сигналов, необходимых для управления ЛА на посадке в автопилот.
1. Отклонение ЛА от оси ВПП в виде отклонения оси симметрии изображения ВПП от направления радиальной линии развертки индикатора. Если РЛ информация представлена в прямоугольных координатах при совмещении вертикальной оси экрана с направлением посадочного курса ВПП (метка НОК), то это отклонение выражается в появлении асимметрии РЛ изображения ВПП и смещении его относительно оси экрана индикатор.
2. Отклонение центра масс (ЦМ) ЛА от прямолинейной глиссады в вертикальной плоскости в виде смещения метки дальности сглаженного следа линии визирования (ДССЛВ) относительно изображения начала ВПП или первого РЛ ориентира, установленного вблизи начала ВПП.
3. Отклонение ЦМ ЛА от траектории выравнивания в вертикальной плоскости в виде смещения метки дальности виртуального следа ЛВ (ДВСЛВ) относительно второго РЛ ориентира, установленного дальше номинальной точки касания ЛА ВПП.
4. Угол крена ЛА в виде перекоса метки ДСЛВ относительно горизонтальной оси экрана индикатора.
5. Высота ЦМ ЛА над подстилающей поверхностью в виде дальности метки высоты.
6. Высота ЦМ ЛА над плоскостью ВПП в виде дальности метки относительной высоты ЦМ (ОВЦМ).
7. Угол сноса или рыскания в виде отклонения метки нулевого азимутального угла антенны от оси симметрии изображения ВПП и оси экрана индикатора.
8. Систематическая ошибка курсовой системы ЛА в виде смещения оси симметрии изображения ВПП (при наличии его симметрии) относительно оси экрана индикатора - метки НОК.
9. Наличие препятствий на ВПП и в секторе глиссады в виде резких изломов линейной метки дальности сглаженного следа линии визирования (ДССЛВ) в сторону меньших дальностей.
10. Дальность до начала ВПП и скорость ее изменения, выраженная, например, в виде частотного или тонального звукового сигнала.
11. Производной (скорости) отклонения ЦМ ЛА от заданной траектории посадки (ЗТП).
12. Величина ошибки системы стабилизации линии визирования (ЛВ) по углу места в виде различия в значениях относительной высоты ЦМ ЛА, полученных по основной и дополнительной ЛВ.
13. Высота над подстилающей поверхностью ЦМ ЛА.
14. Направление линии пути ЛА, что приблизительно эквивалентно производной (скорости) бокового отклонения ЛА от оси ВПП.
Характер представления данной информации обеспечивает надежный контроль ее достоверности, появление неисправности в каком-либо элементе системы приводит к полному искажению изображения на экране монитора, делая его неприемлемым для восприятия. Это свойство принципиально отличает данную систему от известных систем автономной и не автономной выработки посадочной информации.
Текущая дальность до начала ВПП, дальность переднего фронта импульса высоты (высота над подстилающей поверхностью), положение метки ДССЛВ относительно изображения ВПП, метка относительной высоты ЦМ (ОВЦМ), положение метки ДВСЛВ относительно второго РЛ ориентира в совокупности позволяют надежно контролировать правильность движения самолета в вертикальной плоскости.
Отклонение изображения ВПП от метки НОК, появление при этом асимметрии изображения ВПП и сдвиг метки нулевого азимутального угла антенны (метки оси самолета) относительно метки НОК в совокупности позволяют надежно контролировать правильность движения самолета в горизонтальной плоскости.
Следует отметить, что метка НОК (вертикальная ось экрана монитора) и метка ДССЛВ в совокупности формируют перекрестие, обеспечивающее удобство совмещения с ним изображения начала ВПП или первого радиолокационного ориентира в процессе пилотирования самолета на посадке, или контроля работы системы автоматического управления ЛА.
Кроме перечисленной информации для управления ЛА необходима также информация об угле тангажа. Эта информация представлена за счет комплексирования информации от авиагоризонта с радиолокационной информацией на экране монитора.
Граничные частоты спектра колебаний центра масс самолета в вертикальной и горизонтальной плоскостях, а также спектра колебаний по крену, тангажу и курсу обычно не превышают 0,1 Герца. Это позволяет работать с периодом возобновления информации в 0,3-0,5 сек. Скорость сканирования антенны, при секторе сканирования 30 град, составит при этом 100-60 град/сек, что вполне может быть обеспечено даже при механическом сканировании.
В точке начала выравнивания (ТНВ) пилот быстро увеличивает тангаж ЛА. При этом ЛА поворачивается в вертикальной плоскости вокруг оси, проходящей через центр масс ЛА, что приводит к увеличению высоты антенны относительно центра масс ЛА. Это создает эффект кажущегося замедления снижения ЛА.
При этом задача пилота сводится к плавному снижению скорости движения метки высоты ЦМ, начиная с высоты, равной номинальной высоте THB для данного типа ЛА, с таким расчетом, чтобы при приближении ее к нулевой дальности эта скорость была бы равна номинальной вертикальной скорости ЛА в точке касания ВПП.
Для более точной оценки вертикальной скорости целесообразно вывести на экран монитора бегущий трек, скорость движения которого является функцией от высоты ЦМ ЛА. При этом пилот должен засинхронизировать скорость метки высоты ЦМ с движением трека к моменту приближения этой метки к дальности высоты ЦМ в положении ЛА на стоянке.
В настоящее время все самолеты грузоподъемностью больше 10-20 человек оборудованы метеонавигационными радиолокаторами (МНР). Эти МНР успешно используются для обнаружения и обхода зон опасных метеообразований, наземных препятствий (типа гор, телевизионных антенн и т.п.), контроля и коррекции навигационных систем в маршрутном полете и совершенно не используются на посадке.
В то же время эти МНР имеют высокий радиолокационный потенциал при хорошей разрешающей способности по азимутальному углу (около 3 град в диапазоне волн 3 см) и дальности. Так в последнем поколении МНР используются высоконадежные твердотельные передатчики и высокочувствительные приемники, использующие технику сжатия импульсов при низкой импульсной мощности (100-200 Вт). Следовательно, такие МНР можно сравнительно легко модифицировать для использования также и при посадке.
Очевидно, что при работе в диапазоне волн 3 см обнаружение ВПП на расстоянии 10-15 км возможно лишь в том случае, если ВПП обозначена радиолокационными отражателями. Эти отражатели могут быть расставлены вдоль краев ВПП с шагом 20-150 метров.
ЭПР уголкового отражателя равно

где l - длина каждой из сторон отражателя в метрах;
λ - длина волны в метрах.
При l, равной 0,4 м, и λ, равной 0,032 м, из (4) находим σ=26,85 м2. Размер отражающего участка на поверхности аэродрома равен

где R - расстояние до участка в метрах;
Θ - ширина ДНА по азимуту в градусах;
τ - длительность зондирующего импульса в метрах.
ЭПР поверхности земли равно

где σ0 - коэффициент рассеяния, равный для поверхности земли с травяным покровом в диапазоне волн 3 см под углом визирования 3 град к горизонту примерно -26 дБ (0,0025) [Справочник по радиолокации, ред. М. Сколник, М. Сов. рад. 1976 г. т.1, стр.239, рис.26].
Для R=4000 м, Θ=3 град, τ=7,5 м из (5 и 6) находим ЭПРФ=3,92 м2, т.е. в 7 раз ниже ЭПР уголкового отражателя. При уменьшении дальности это отношение увеличивается.
Опыт эксплуатации МНР и прицельных РЛ, имеющих разрешающую способность по дальности менее 75 метров и разрешающую способность по азимуту менее 3-4 град, показывает, что на развертке монитора 8-10 км (с соответствующей задержкой ее начала) пилот может обнаруживать прямолинейные структуры протяженностью 1,5-2 км. и более, обозначенные большим количеством одинаковых отражателей, ЭПР которых превышает ЭПР подстилающей поверхности, на расстоянии 15-30 км, практически в метеоусловиях любой сложности. Это обстоятельство позволяет пилоту, пользуясь радиолокационной информацией, с достаточной точностью вывести самолет в точку начала глиссады на ВПП, обозначенную такими отражателями.
Использование для этих целей отражателей, работающих одновременно в РЛ и оптическом диапазоне волн, позволит осуществлять посадку в ночное время ЛА, не оборудованных посадочными БР, на аэродромы, не оборудованные светотехнической системой, или при выходе ее из строя.
Такой отражатель (см. фиг.16) может быть выполнен, например, в виде геометрического тела в форме четырехугольной пирамиды 3 на квадратном параллелепипеде 1, собранного и скрепленного при помощи клея из четырех треугольных пирамид 2 из пеностирола, боковые грани которых покрыты фольгой или металлизированы, положенных на нижнем дополняющем многограннике 4 так, что они соприкасаются между собой вершинами и попарно двумя ребрами а сверху зафиксированы верхним дополняющим многогранником 5, а их основания совпадают с боковыми гранями отражателя. На поверхности сформированного таким образом геометрического тела 1 закреплена радиопрозрачная световозвращающая пленка.
Стоимость такого отражателя не превысит $ 285. Следовательно, стоимость оборудования ВПП длиной 2 км не превысит $ 35000-56000, что на порядок ниже стоимости оборудования ВПП светотехнической системой.
Расходы по эксплуатации светотехнической системы не сопоставимы с расходами по эксплуатации двухдиапазонных отражателей.
Для оборудования ВПП такими отражателями потребуется не более 1-2-х дней, а для оборудования светотехнической системой - несколько месяцев.
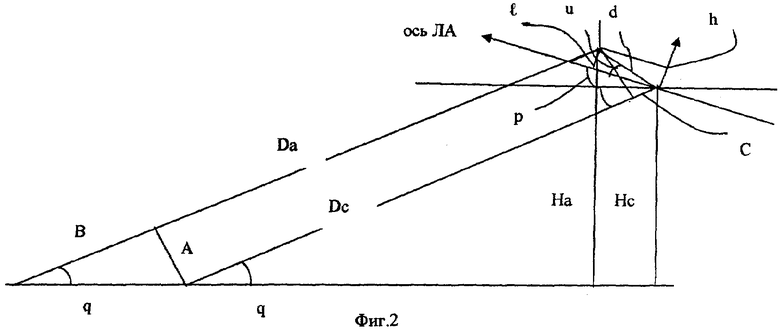
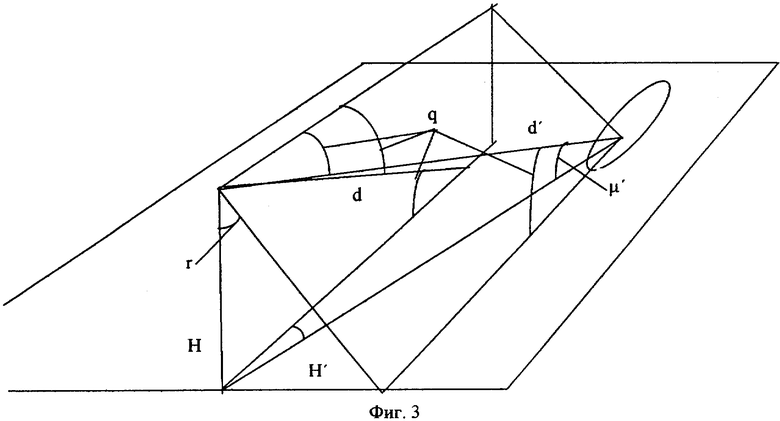
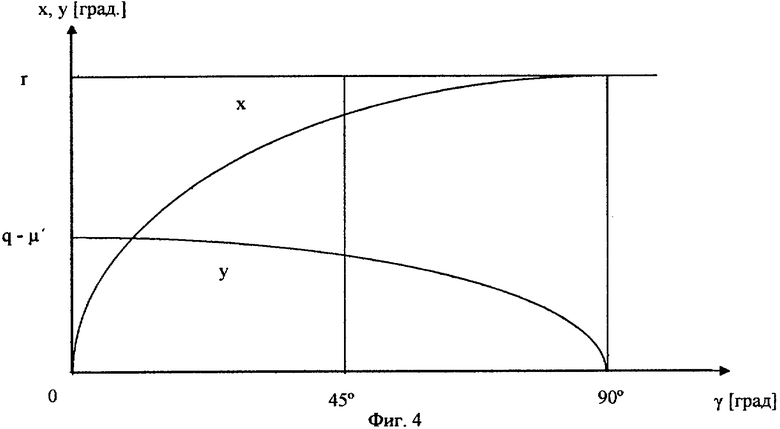
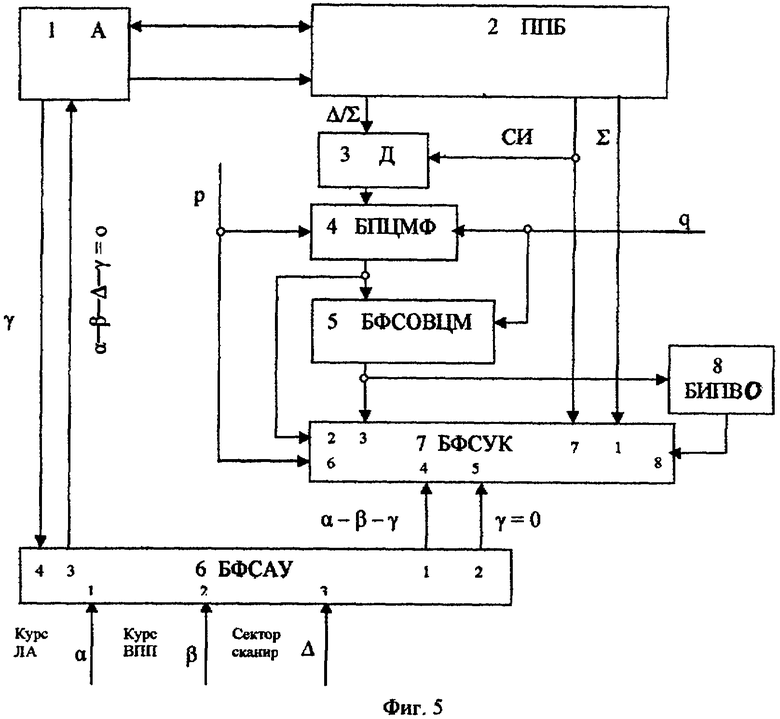
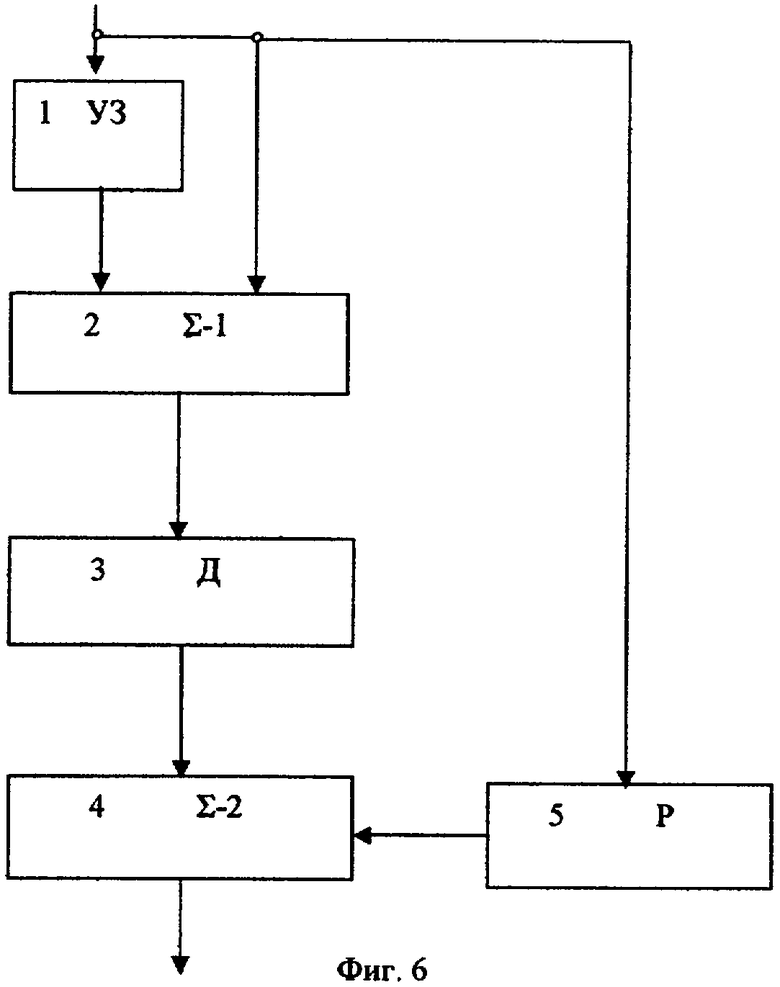
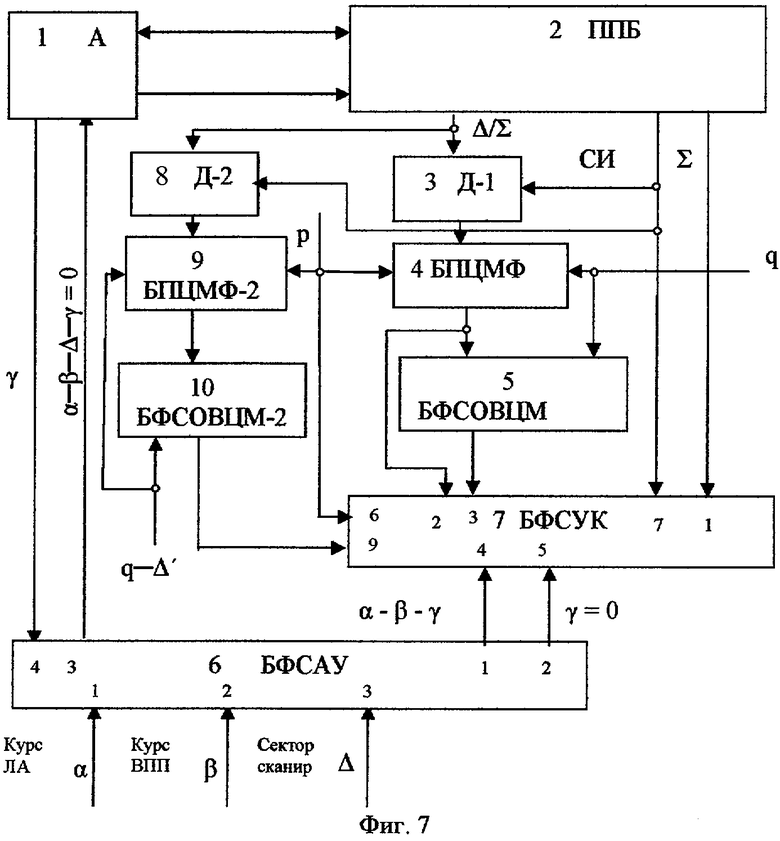
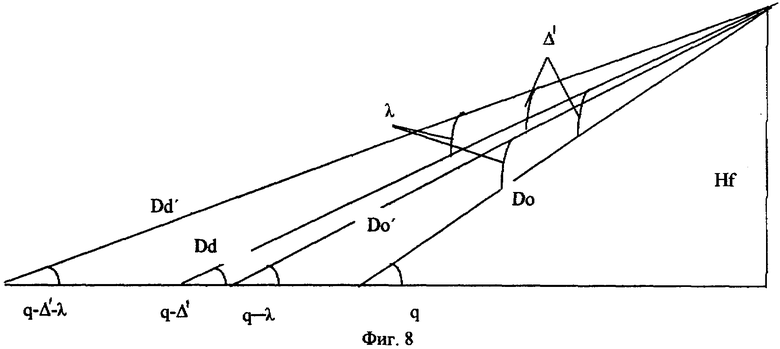
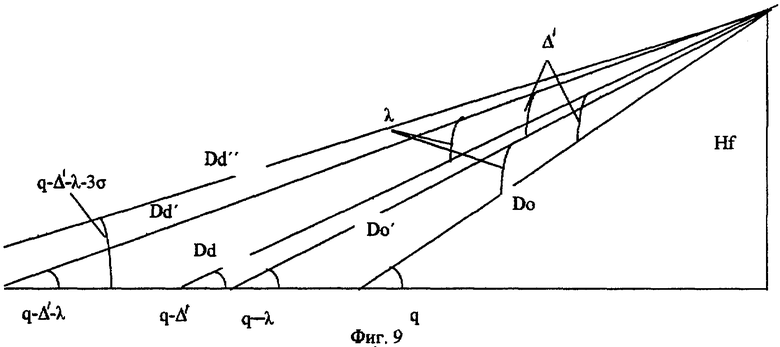
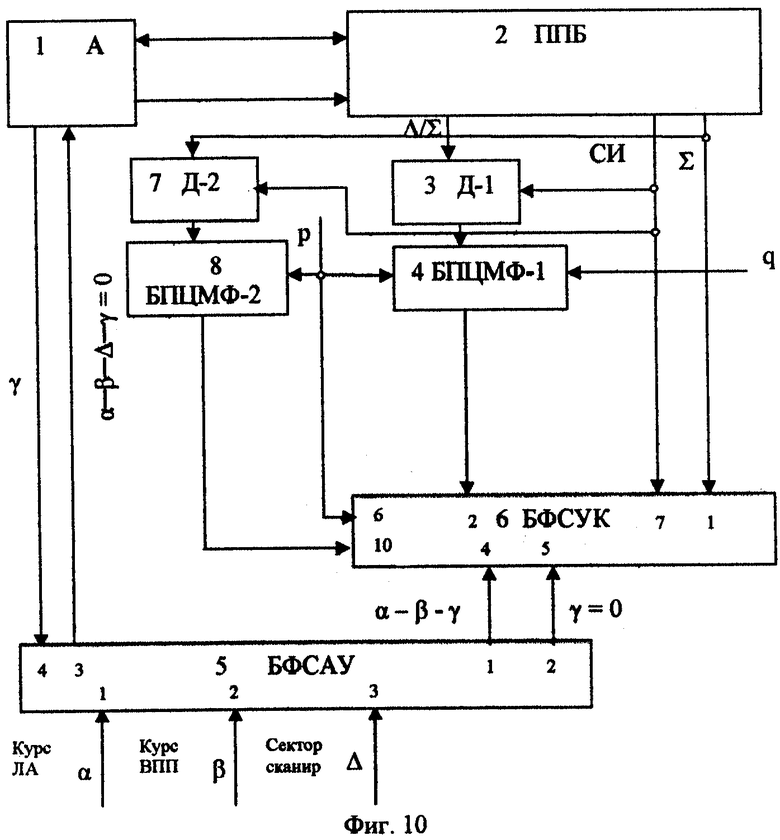
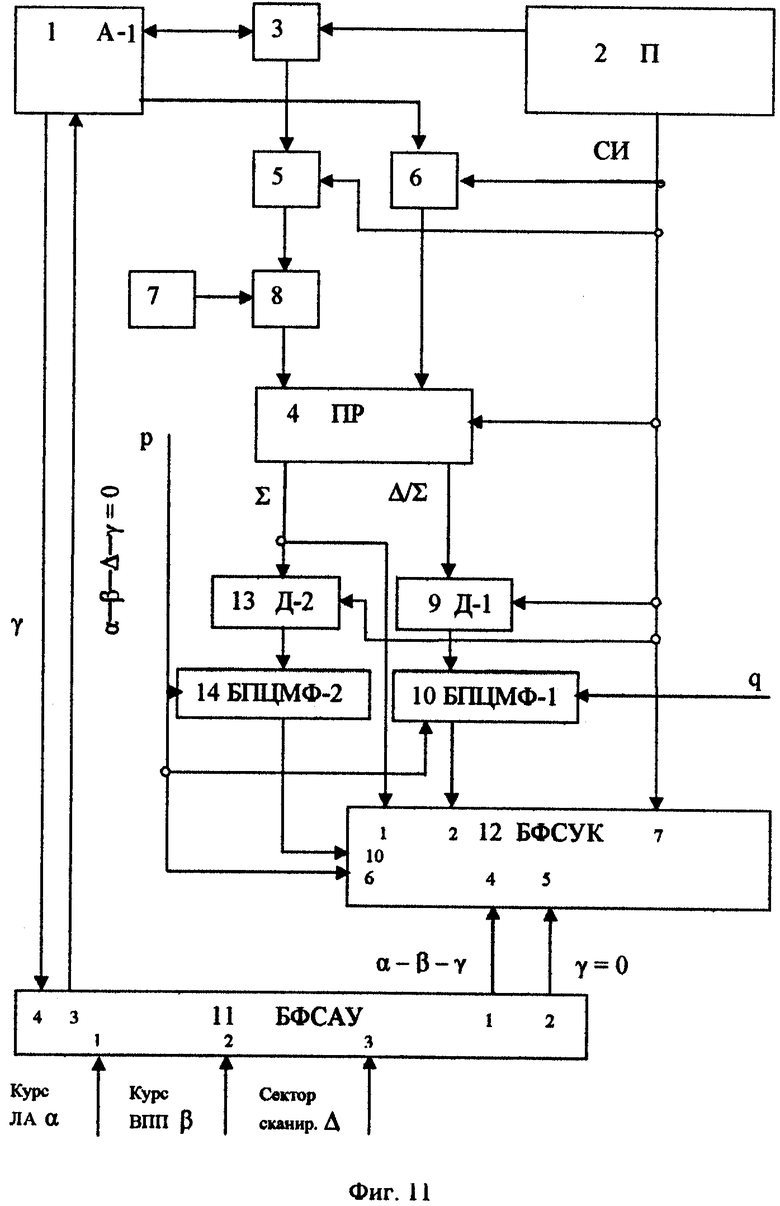
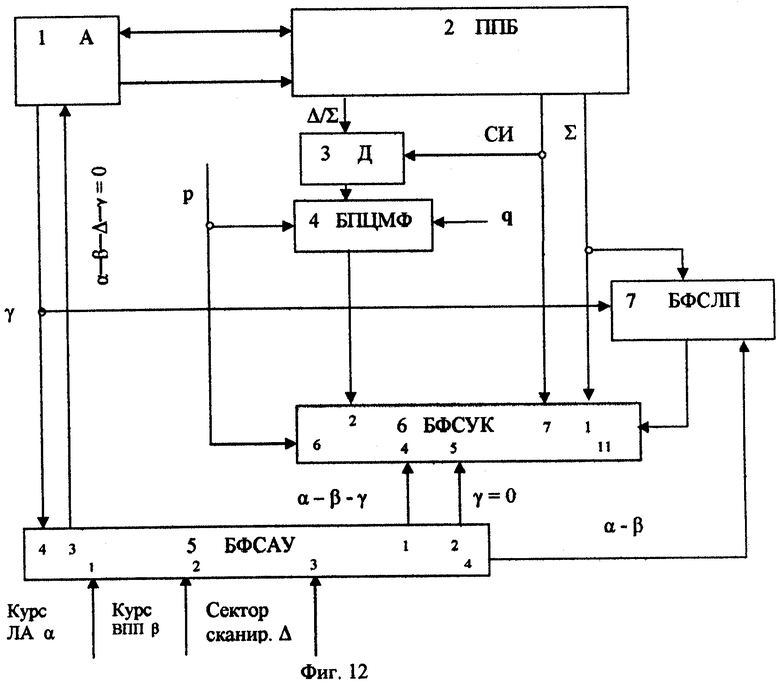
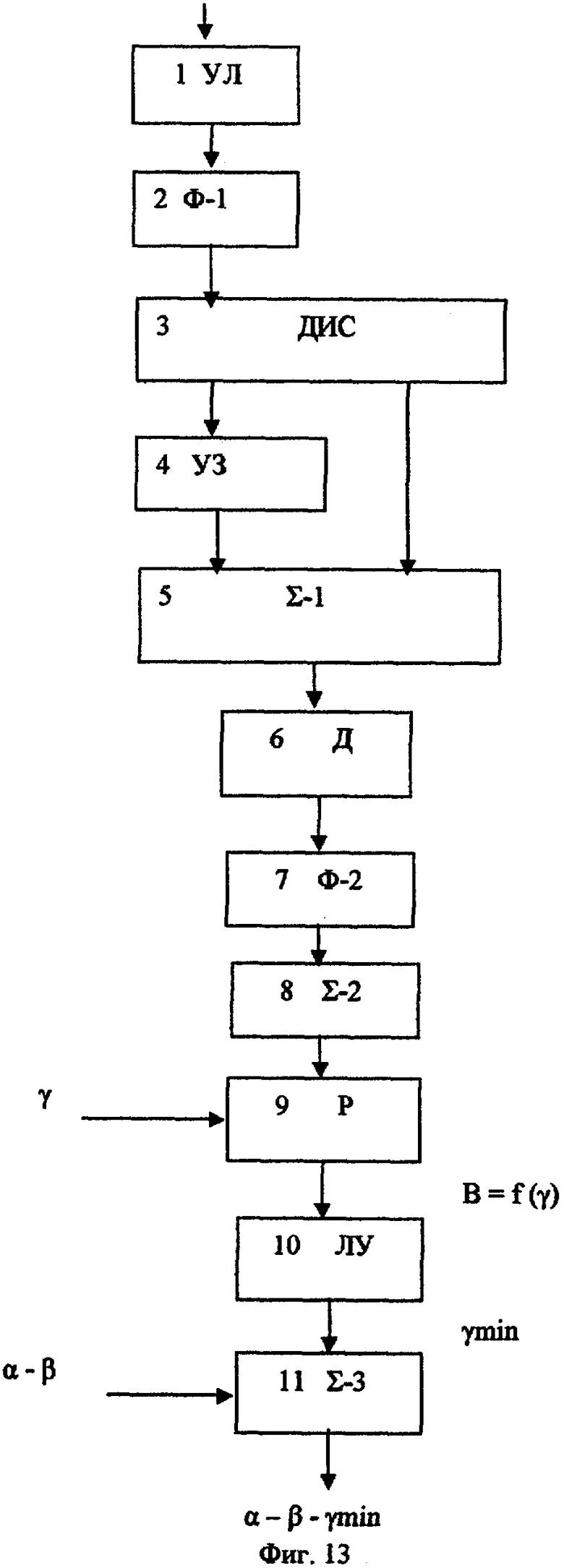
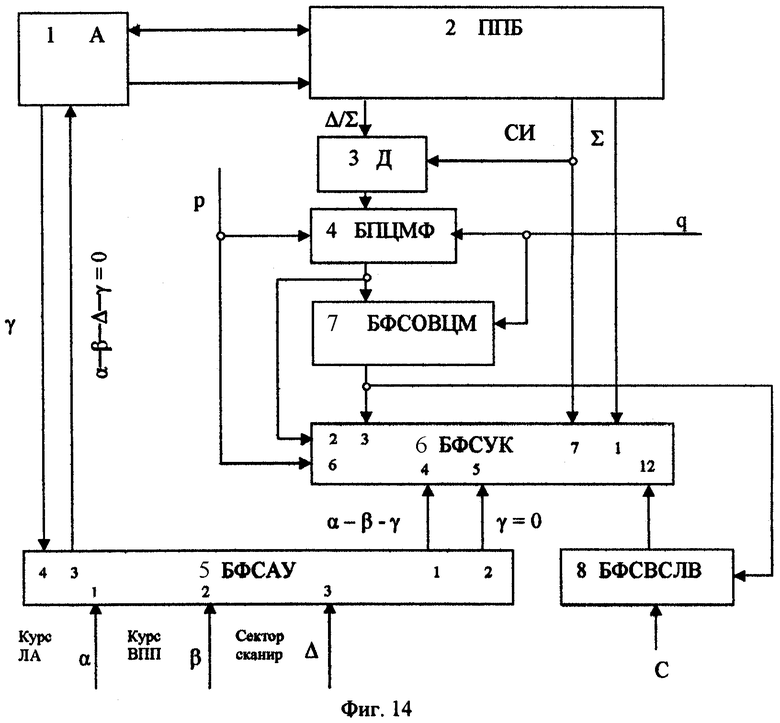
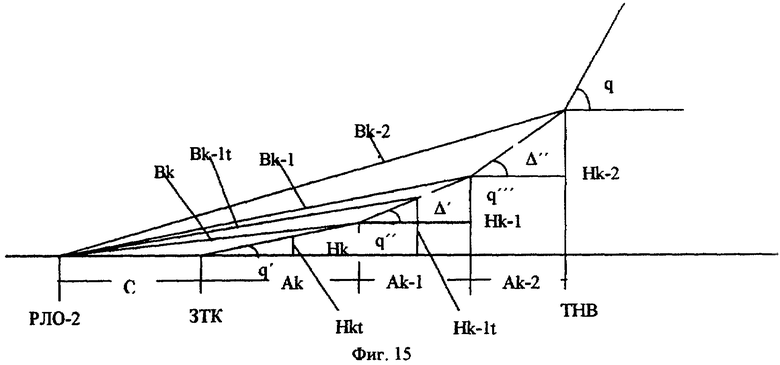
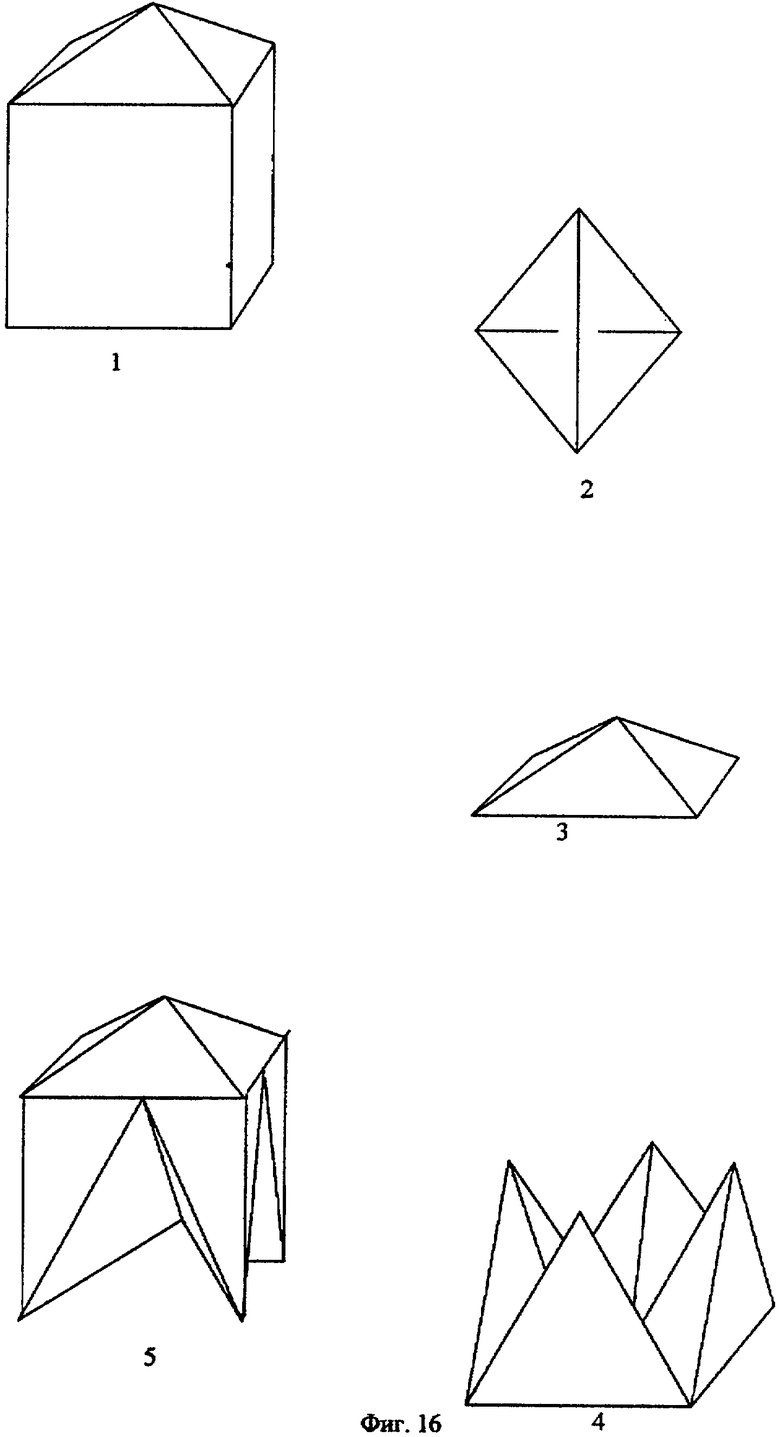
Изобретение относится к области радиолокационного оборудования летательных аппаратов (ЛА). Достигаемым техническим результатом является повышение точности выполнения маневра посадки. Поставленная цель достигается за счет того, что заявленное изобретение обеспечивает на мониторе радиолокационное изображение, с высокой скоростью воспроизведения, взлетно-посадочной полосы (ВВП) в прямоугольных координатах «угол азимута-дальность» и информации о наклонной дальности до поверхности аэродрома вдоль линии визирования, установленной под углом места, равным углу наклона глиссады к плоскости горизонта, а также информации о направлении вектора путевой скорости, высоте центра масс относительно плоскости ВВП, вертикальной скорости, боковой скорости и бокового отклонения от заданной траектории посадки и угле сноса летательного аппарата, при этом характер представления указанной информации обеспечивает надежный контроль ее достоверности пилотом. 16 н. и 9 з.п. ф-лы, 16 ил.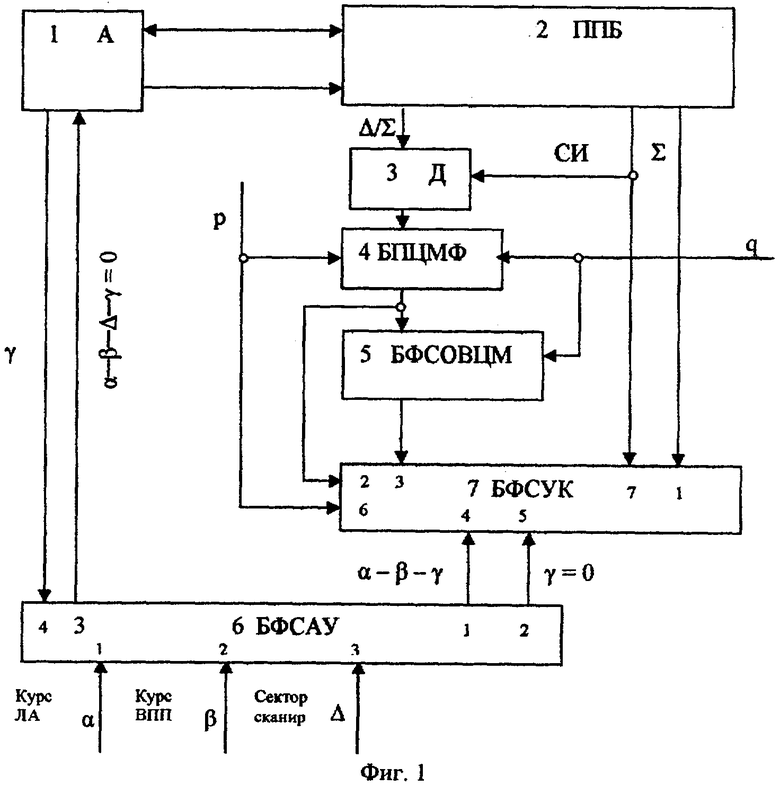
| Способ автономного формирования посадочной информации для летательного аппарата и устройство для его осуществления | 1991 |
|
SU1836642A3 |
| Устройство индикации вертикальной позиции летательного аппарата в полете | 1991 |
|
SU1827362A1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| Гусеничная машина для добычи резного торфа | 1935 |
|
SU48159A1 |
| US 6097338 A, 01.08.2000 | |||
| US 6119055 A, 12.09.2000 | |||
| EP 1563473 А2, 17.08.2005. | |||

