Изобретение относится к радиолокационным системам посадки летательных аппаратов (ЛА) и может быть использовано в системах управления воздушным движением.
Известны комплексные системы посадки (КСП) ЛА, построенные с применением сложной авиационной техники, направленной на обеспечение высокого уровня безопасности полетов (БП) [1].
Наиболее надежными КСП ЛА являются системы, в которых при посадке ведется непрерывное наблюдение за вектором скорости ЛА и поддержание скорости ЛА в безопасных пределах.
К таким системам относится, например, усовершенствованная международная система ILS (Instrument Landing System) [2].
В данной КСП на экране индикатора пилота дополнительно отображается область безопасных скоростей планирования, в которой необходимо удерживать отметку вектора скорости ЛА при заходе на посадку.
Наибольшие возможности для обеспечения БП связаны с повышением физиологических и психологических возможностей пилота и диспетчера посадки.
Одним их таких направлений является осуществление идентичного восприятия полетной информации диспетчером посадки и пилотом при непрерывном наблюдении векторов скоростей ЛА на индикаторах курса и глиссады [3, 4].
Наиболее совершенным является КСП, в котором формируются не только векторы текущих скоростей, но и векторы оптимальных скоростей по курсу и глиссаде, а в процессе посадки производится совмещение соответствующих векторов скоростей [4].
Данная КСП является прототипом заявляемого изобретения.
Она содержит наземную аппаратуру, включающую последовательно соединенные между собой клеммами «выход» - «вход» посадочный радиолокатор, блок обработки информации, блок вычисления координат, наземный видеопреобразователь, индикатор диспетчера посадки, входящий в пульт диспетчера посадки, бортовую аппаратуру, включающую последовательно соединенные между собой клеммами «выход»-«вход» пилотажно-навигационный блок, бортовой видеопреобразователь, индикатор пилота, входящий в пульт пилота, двустороннюю линию передачи данных с наземными и бортовыми приемниками, передатчиками и антенными системами, бортовые формирователи векторов текущих курсовой и глиссадной скоростей и наземный разделитель векторов курсовой и глиссадной скоростей, причем выход блока вычисления координат одновременно подключен к входу наземного передатчика, входы бортовых формирователей текущих курсовой и глиссадной скоростей подключены к первому дополнительному выходу пилотажно-навигационного блока, выходы бортовых формирователей векторов текущих и глиссадной скоростей подключены к входам бортового передатчика и одновременно соответственно к первому второму дополнительным входам бортового видеопреобразователя, выход наземного приемника через разделитель векторов курсовой и глиссадной скоростей подключен к первому и второму дополнительным входам наземного видеопреобразователя, а также содержит преобразователь параметров границ вертикальной и горизонтальной видимости, формирователи векторов скоростей ветра по курсу и глиссаде, бортовые формирователи векторов оптимальных курсовой и глиссадной скоростей, бортовой разделитель наземной информации, при этом выходы формирователей скоростей ветра по курсу и глиссаде соединены с первым дополнительным входом блока вычисления координат, второй дополнительный вход которого соединен с выходом преобразователя параметров границ вертикальной и горизонтальной видимости, выход бортового приемника двусторонней линии передачи соединен с входом бортового разделителя наземной информации, первый выход которого соединен с дополнительным входом пилотажно-навигационного блока, а второй выход соединен с первыми входами бортовых формирователей оптимальных курсовой и глиссадных скоростей, вторые входы которых соединены с вторым дополнительным выходом пилотажно-навигационного блока, а выходы которых соединены соответственно с третьим и четвертым дополнительными входами бортового видеопреобразователя и дополнительными входами бортового передатчика.
В [4] предложен также способ захода на посадку, осуществляемый при использовании предложенной КСП, суть которого состоит в том, что на курсоглиссадных индикаторах диспетчера посадки и пилота использованы идентичные развертки с изображением линий курса и глиссады, а также зон, ограниченных линиями равных отклонений от курса и глиссады, летательный аппарат изображают в виде курсовых и глиссадных векторов, начало которых совпадает с центром радиолокационной отметки летательного аппарата, а направление и длина указывают соответственно на направление и величину текущих курсовой и глиссадной скоростей и одновременно непрерывно отображают векторы оптимальных курсовых и глиссадных скоростей, начала которых совмещены с радиолокационной отметкой летательного аппарата, а направление и длина соответствуют оптимальной в данный момент скорости приближения летательного аппарата к линиям курса и глиссады и движения по касательным к этим линиям, при этом при пилотировании совмещают направления векторов упомянутых текущих скоростей с направлениями соответствующих оптимальных скоростей, регулируя одновременно длину векторов текущих скоростей до их совпадения с длинами векторов оптимальных скоростей.
КСП - прототип и способ захода на посадку на его основе могут быть усовершенствованы с целью дальнейшего повышения безопасности полетов на основе научных идей, разработанных к настоящему времени [5, 6].
В заявляемом изобретении решается задача повышения безопасности полетов путем снижения психологической нагрузки пилота и диспетчера, повышения информативности отображения, увеличения автономности работы пилота.
Заявляемая комплексная система посадки летательных аппаратов содержит наземную аппаратуру, включающую последовательно соединенные между собой клеммами «выход»-«вход» посадочный радиолокатор, блок обработки информации, блок вычисления координат, наземный видеопреобразователь, индикатор диспетчера посадки, входящий в пульт диспетчера посадки, бортовую аппаратуру, включающую последовательно соединенные между собой клеммами «выход»-«вход» пилотажно-навигационный блок, бортовой видеопреобразователь, индикатор пилота, входящий в пульт пилота, двустороннюю линию передачи данных с наземными и бортовыми приемниками, передатчиками и антенными системами, бортовые формирователи векторов текущих курсовой и глиссадной скоростей и наземный разделитель векторов курсовой и глиссадной скоростей, входы бортовых формирователей текущих курсовой и глиссадной скоростей подключены к первому дополнительному выходу пилотажно-навигационного блока, выходы бортовых формирователей векторов текущих курсовой и глиссадной скоростей подключены к входам бортового передатчика и одновременно соответственно к первому и второму дополнительным входам бортового видеопреобразователя, выход наземного приемника через разделитель векторов курсовой и глиссадной скоростей подключен к первому и второму дополнительным входам наземного видеопреобразователя, а также содержит преобразователь параметров границ вертикальной и горизонтальной видимости, формирователи векторов скоростей ветра по курсу и глиссаде, бортовые формирователи векторов оптимальных курсовой и глиссадной скоростей, бортовой разделитель наземной информации, при этом выходы формирователей скоростей ветра по курсу и глиссаде соединены с первым дополнительным входом блока вычисления координат, второй дополнительный вход которого соединен с выходом преобразователя параметров границ вертикальной и горизонтальной видимости, выход бортового приемника двусторонней линии передачи данных соединен с входом бортового разделителя наземной информации, первый выход которого соединен с дополнительным входом пилотажно-навигационного блока, а второй выход соединен с первыми входами бортовых формирователей оптимальных курсовой и глиссадных скоростей, вторые входы которых соединены с вторым дополнительным выходом пилотажно-навигационного блока, а выходы которых соединены соответственно с третьим и четвертым дополнительными входами бортового видеопреобразователя и дополнительными входами бортового передатчика, дополнительно в наземную аппаратуру введены узел сопряжения информации, радиолокатор обзора летного поля, формирователь карты летного поля, база данных аэропорта, наземная база данных рельефа, наземный формирователь проекций рельефа по курсу и глиссаде, в бортовую аппаратуру введены бортовая база данных рельефа и бортовой формирователь проекций рельефа по курсу и глиссаде, а пульт пилота и пульт диспетчера выполнены соответственно с наземным и бортовым переключателями масштабов, при этом выход блока вычисления координат соединен с первым входом узла сопряжения информации, соединенного выходом с входом наземного передатчика, выход радиолокатора обзора летного поля соединен с входом формирователя карты летного поля, выход которого соединен с первым базовым входом наземного видеопреобразователя и с вторым входом узла сопряжения информации, выход базы данных аэропорта соединен с вторым базовым входом наземного видеопреобразователя и с третьим входом узла сопряжения информации, выход наземной базы данных рельефа соединен с первым входом наземного формирователя проекций рельефа по курсу и глиссаде, второй вход которого соединен с выходом блока вычисления координат, а выход которого соединен с третьим базовым входом наземного видеопреобразователя, выход бортовой базы данных рельефа соединен с первым входом бортового формирователя проекций рельефа по курсу и глиссаде, второй вход которого соединен с первым выходом бортового разделителя наземной информации, а выход упомянутого бортового формирователя соединен с базовым входом бортового видеопреобразователя, выходы наземного и бортового переключателей соединены соответственно с управляемыми входами индикаторов диспетчера посадки и пилота, а выход бортового переключателя дополнительно подключен к масштабирующему входу бортового передатчика, причем упомянутые переключатели выполнены трехпозиционными, позиции которых последовательно соответствуют масштабам дальностей на трех этапах посадки, определяемым соответственно максимальной дальностью при заходе на посадку, дальностью, соответствующей высоте принятия решения о посадке, и расстоянием, равным длине взлетно-посадочной полосы.
Заявляемый способ захода на посадку летательного аппарата с использованием заявляемой комплексной системы посадки состоит в том, что на курсоглиссадных индикаторах диспетчера посадки и пилота использованы идентичные развертки с отображением линий курса и глиссады, а также зон, ограниченных линиями равных отклонений от курса и глиссады, при этом летательный аппарат изображают в виде курсовых и глиссадных векторов, начало которых совпадает с центром радиолокационной отметки летательного аппарата, а направление и длина указывают соответственно на направление и величину текущих курсовой и глиссадной скоростей и одновременно непрерывно отображают векторы оптимальных курсовых и глиссадных скоростей, начала которых совмещены с радиолокационной отметкой летательного аппарата, а направление и длина соответствуют оптимальной в данный момент скорости приближения летательного аппарата к линиям курса и глиссады и движения по касательным к этим линиям, совмещают при пилотировании направления векторов упомянутых текущих скоростей с направлениями соответствующих оптимальных скоростей, регулируя одновременно длину векторов текущих скоростей до их совпадения с длинами оптимальных скоростей, при этом в процессе посадки летательного аппарата изменяют зону отображения линий курса и глиссады в соответствии с изменяющейся дальностью до летательного аппарата при трех основных этапах посадки, при этом дальность первой зоны ограничивают максимальной дальностью при заходе на посадку, далее при приближении к высоте принятия решения о посадке производят переключение отображения на вторую зону, а при приближении к точке прицеливания производят переключение отображения на третью зону, определяемую длиной взлетно-посадочной полосы, причем на этапе второй зоны в случае принятия решения о заходе на второй круг производят возврат отображения на первую зону и далее повторяют в процессе посадки последовательное переключение зон, при этом упомянутые переключения зон производят синхронно на индикаторах пилота и диспетчера по команде, выдаваемой пилотом.
Предлагается, чтобы максимальная дальность второй зоны превышала дальность, соответствующую высоте принятия решения о посадке, на расстояние не меньше, чем произведение путевой скорости летательного аппарата на время, необходимое для принятия пилотом решения о посадке.
Предлагается отображение линий курса и глиссады совмещать в идентичных координатах на упомянутых первой и второй зоне с отображением рельефа, сформированного в виде проекций соответственно по курсу и глиссаде, а на третьей зоне отображение линий курса и глиссады совмещать с отображением взлетно-посадочной полосы и радиолокационного обзора летного поля.
Предлагается на отображении рельефа, совмещенного с отображением линии глиссады, выделять левую и правую части относительно линии курса, например, с помощью цветового выделения, соответствующего светоуказателям левой и правой сторон взлетно-посадочной полосы.
Предлагается также отображать линию допустимого отклонения глиссады, характеризующую максимально допустимое отклонение от линии глиссады, требуемое для преодоления угрозы столкновения с рельефом, и располагающуюся ниже линии глиссады на расстоянии, равном произведению вертикальной скорости снижения на сумму времени реакции пилота и постоянной времени системы управления летательным аппаратом.
Предлагается также отображение рельефа, совмещенное с линией глиссады, производить в виде проекции рельефа, синтезированной по максимальным высотам рельефа между линиями равных отклонений от курса так, что левая и правая части отображения рельефа относятся к областям между линией курса и соответственно левой и правой линиями отклонений от курса.
С помощью фиг.1-3 поясняется работа КСП и способ захода на посадку.
На фиг.1 представлена блок-схема КСП, являющаяся усовершенствованной блок-схемой КСП-прототипа [4].
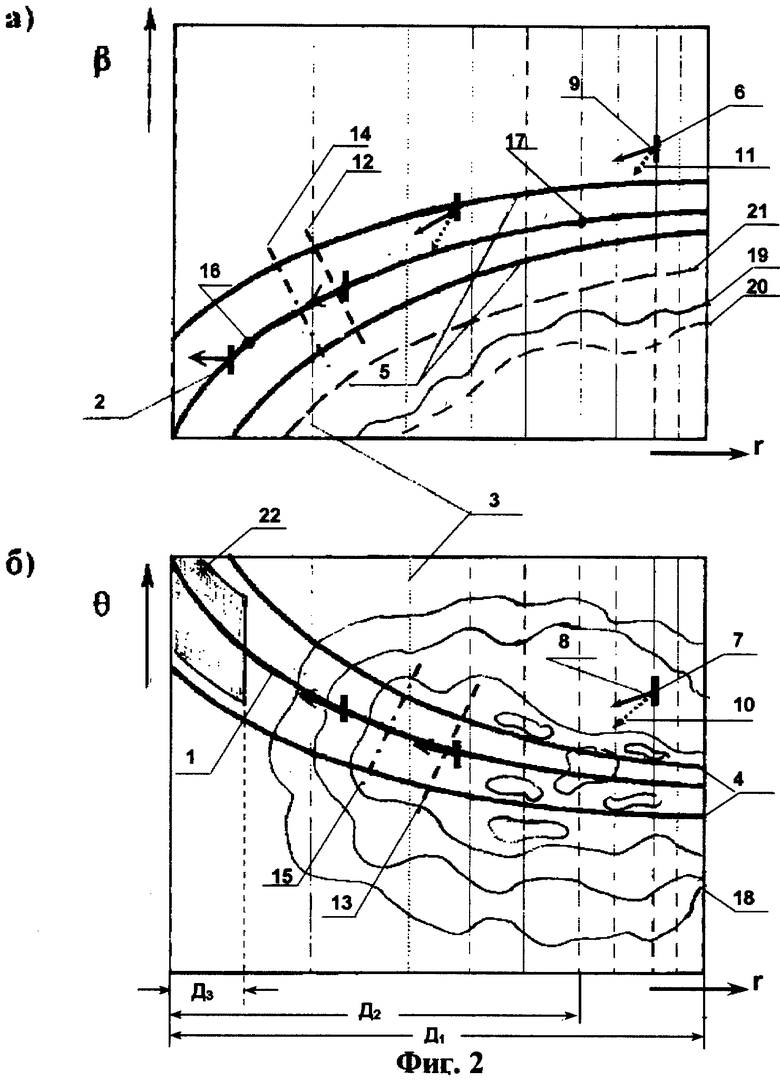
На фиг.2 приведены картины отображений линий глиссады (фиг.2а) и линий курса (фиг.2б).
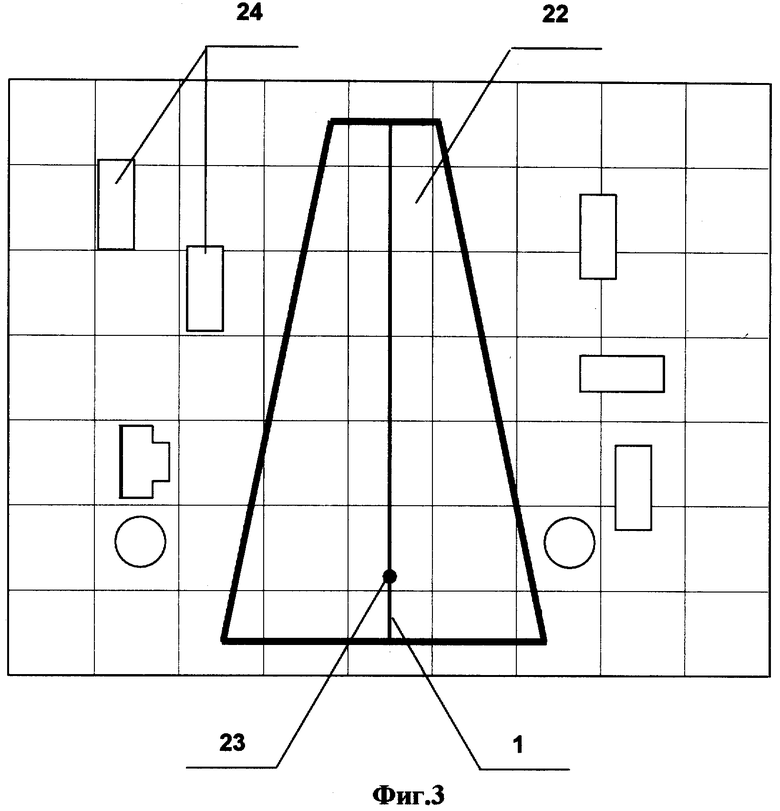
На фиг.3 дана карта ВПП и летного поля вблизи ВПП непосредственно при посадке.
КСП на фиг.1 содержит наземную аппаратуру, включающую последовательно соединенные между собой клеммами «выход»-«вход» посадочный радиолокатор (ПРЛ)1, блок обработки информации 2, блок вычисления координат (БВК)3, наземный видеопреобразователь (НВП)4, индикатор диспетчера посадки 5, входящий в пульт диспетчера посадки 6, бортовую аппаратуру, включающую последовательно соединенные между собой клеммами «выход»-«вход» пилотажно-навигационный блок (ПНБ)7, бортовой видеопреобразователь (БВП)8, индикатор пилота 9, входящий в пульт пилота 10, двустороннюю линию передачи данных (ДЛПД)12 с наземными и бортовыми приемниками 13, 16, передатчиками 14, 17 и антенными системами 15, 18, бортовые формирователи векторов текущих курсовой 19 и глиссадной 20 скоростей и наземный разделитель векторов курсовой и глиссадной скоростей 21, входы бортовых формирователей текущих курсовой и глиссадной скоростей подключены к первому дополнительному выходу пилотажно-навигационного блока 7, выходы бортовых формирователей векторов текущих курсовой и глиссадной скоростей 19, 20 подключены к входам бортового передатчика 17 и одновременно соответственно к первому и второму дополнительным входам бортового видеопреобразователя 8, выход наземного приемника через разделитель векторов курсовой и глиссадной скоростей 21 подключен к первому и второму дополнительным входам наземного видеопреобразователя 4.
КСП также содержит преобразователь параметров границ вертикальной и горизонтальной видимости 22, формирователи векторов скоростей ветра по курсу 23 и глиссаде 24, бортовые формирователи векторов оптимальных курсовой 25 и глиссадной 26 скоростей, бортовой разделитель наземной информации 27.
Выходы формирователей 23 и 24 соединены с первым дополнительным входом БВК 3, второй дополнительный вход которого соединен с выходом преобразователя 22, выход бортового приемника ДЛПД 12 соединен с входом бортового разделителя наземной информации, первый выход которого соединен с дополнительным входом ПНБ 7, а второй выход соединен с первыми входами бортовых формирователей 25 и 26, вторые входы которых соединены с вторым дополнительным выходом ПНБ 7, а выходы которых соединены соответственно с третьим и четвертым дополнительными входами БВП 8 и дополнительными входами бортового передатчика 17. Дополнительно, по сравнению с КСП-прототипом, в наземную аппаратуру введены узел сопряжения информации (УСИ)28, радиолокатор обзора летного поля (РОЛП)29, формирователь карты летного поля (ФКЛП)30, база данных аэропорта (БДА)31, наземная база данных рельефа (НБДР)32, наземный формирователь проекции рельефа по курсу и глиссаде (НФПР)33, в бортовую аппаратуру введены бортовая база данных рельефа (ББДР)34 и бортовой формирователь проекций рельефа (БФПР)35 по курсу и глиссаде, а пульт пилота 9 и пульт диспетчера 5 выполнены соответственно с наземным 36 и бортовым 37 переключателями масштабов, при этом выход БВК 3 соединен с первым входом УСИ 28, соединенного выходом с входом наземного передатчика 14, выход РОЛП 29 соединен с входом ФКЛП 30, выход которого соединен с первым базовым входом НВП 4 и с вторым входом УСИ 28, выход БДА 31 соединен с вторым базовым входом НВП 4 и с третьим входом УСИ 28, выход НБДР 32 соединен с первым входом НФПР 33, второй вход которого соединен с выходом БВК 3, а выход которого соединен с третьим базовым входом НВП 4, выход ББДР 34 соединен с первым входом БФПР 35, второй вход которого соединен с первым выходом бортового разделителя наземной информации 27, а выход упомянутого бортового формирователя 34 соединен с базовым входом БВП 8, выходы наземного 36 и бортового 37 переключателей соединены соответственно с управляемыми входами индикаторов диспетчера посадки 5 и пилота 9, а выход бортового переключателя 37 дополнительно подключен к масштабирующему входу бортового передатчика 17, причем упомянутые переключатели выполнены трехпозиционными, позиции которых последовательно соответствуют масштабам дальностей на трех этапах посадки, определяемым соответственно максимальной дальностью при заходе на посадку, дальностью, определяемой высотой принятия решения о посадке, и расстоянию, равному длине взлетно-посадочной полосы.
Описанный выше КСП работает следующим образом.
Блоки 1-27 выполняют функции, совпадающие с функциями одноименных блоков в КСП-прототипе [4].
Аналогично прототипу принятый ПРЛ 1 сигнал ЛА поступает в блок обработки 2, а затем в БВК 3, где определяются координаты ЛА, далее в НВП 4 формируются сигналы, создающие картину отображения, воспроизводимую в индикаторе диспетчера посадки 5 в пульте диспетчера 6.
Одновременно, сформированная в БВК 3 информация передается через ДЛПД 12 на борт. Сформированные бортовыми формирователями 19 и 20 сигналы передаются через ДЛПД 12 в наземную аппаратуру и через наземный разделитель 21 и НВП 4 поступают в виде изображения на индикатор 5.
Блоки 7, 8, 9, 10 выполняют функции, позволяющие сформировать картину отображения информации для пилота, также описаны в прототипе [4].
В наземной аппаратуре благодаря блокам 22, 23, 24 производится ввод в КСП информации о метеорологических данных вблизи аэропорта.
Поступающая на борт информация о координатах ЛА и скоростях ветра разделяется бортовым разделителем 27 так, что информация о координатах ЛА поступает с первого выхода 27 в ПНБ 7, а затем, суммируясь с данными бортовых датчиков, преобразуется БВП 8 и отображается на индикаторе пилота 9. Метеорологическая составляющая наземной информации с второго выхода блока 27 поступает в блоки 25 и 26, куда также поступает через ПНБ 7 наземная информация о координатах ЛА и линиях курса и глиссады, а также бортовая информация (от бортовых датчиков) о скоростях ЛА, оборотах двигателей, запасе топлива и т.д.
В блоках 25 и 26 на основе анализа поступившей информации рассчитываются направления и величина оптимальных на данный момент курсовой и глиссадной скоростей, поступающие далее на дополнительные входы БВП 8, где объединяются с данными о векторах соответствующих текущих скоростей, поступивших с выходов блоков 19 и 20. Аналогичное объединение данных о текущих и оптимальных скоростях происходит на НВП 4, куда информация с борта поступает через ДЛПД 12. На индикаторе пилота 9 отображаются как текущие, так и оптимальные скорости, что позволяет пилоту корректировать полетные данные, эффективно приближая ЛА к заданным линиям курса и глиссады. Отображение на индикаторе пилота дублируется на индикаторе диспетчера 5, позволяя диспетчеру полностью контролировать действия пилота.
В отличие от прототипа, передача информации с выхода БВК 3 на вход ДЛПД 12 происходит через узел сопряжения 28.
Одновременно ПРЛ 1 сопрягается с РОЛП 29, функционирующим в современных аэропортах и регистрирующим передвижение ЛА и автотранспорта в зоне аэропорта. Данные радиолокатора 29 преобразуются формирователем 30 в необходимых для отображения координатах и с выхода 30 вводятся в НВП 4 через первый базовый вход; одновременно с выхода 30 данные карты летного поля вводятся через первый вход УСИ 28.
Кроме того, в НВП 4 через его второй базовый вход и в УСИ 28 через его второй вход вводятся данные о ВПП и находящихся вблизи нее посадочных ориентирах и устройствах подсветки, поступающие с выхода БДА 31. Параллельно с БДА 31 использована наземная база данных рельефа 32, содержащая информацию о рельефе в районе ближней навигации и захода на посадку.
Для формирования совместного отображения рельефа с линиями курса и глиссады необходимо определить проекцию рельефа по курсу (на горизонтальную плоскость) и по глиссаде (на вертикальную плоскость.) Эту задачу решают формирователь 33, принимающий на первый вход сигнал с выхода БДР 32 и передающий преобразованную информацию с выхода на третий базовый вход НВП 4. Узел сопряжения 28 и формирователь 33 синхронизируются с координатами ЛА с помощью сигнала, поступающего с выхода БВК 3 на третий вход узла 28 и второй вход формирователя 33.
Через узел сопряжения 28 карта летного поля и база данных аэропорта вводятся в наземный передатчик 14 ДЛПД 12, принимаются на борту приемником 16 и через бортовой разделитель 27 поступают в ПНБ 7 и далее в БВП 8.
В бортовой аппаратуре использованы бортовая база данных рельефа 34 и бортовой формирователь проекций рельефа по курсу и глиссаде 35, аналогичные соответственно НБДР 32 и НФПР 33, при этом синхронизация БФПР 35 с координатами ЛА производится сигналом, поступающим на его второй вход с выхода разделителя 27, а его выход соединен с базовым входом БВП 8.
Таким образом, на индикаторе диспетчера 5 и индикаторе пилота 8 идентичные отображения линий курса и глиссады совмещаются с идентичными отображениями карты летного поля с ВПП и рельефа в зонах ближней навигации, захода на посадку и непосредственно посадки.
В результате повышается информативность системы отображения.
Одновременно решена задача снижения психологической нагрузки пилота и диспетчера, что обеспечивается строго направленным отображением информации, соответствующим конкретной фазе захода на посадку и посадки.
Это производится с помощью переключателей зон отображения - наземным и бортовым переключателями масштабов 36 и 37, выходы которых подключены соответственно к управляемым входам индикаторов диспетчера посадки и пилота 5, 9. Выход переключателя 37 соединен также с масштабирующим входом бортового передатчика 17 ДЛПД 12, что позволяет формировать на индикаторах 5 и 9 отображение с идентичным масштабом по дальности по инициативе пилота. При этом пилот может задавать три позиции переключателя 37, соответствующие масштабам дальностей на основных этапах посадки:
- максимальной при заходе на посадку;
- определяемой высотой принятия решения о посадке;
- расстоянием, равным длине ВПП.
Таким образом, внимание пилота и диспетчера сконцентрировано на отображении текущего этапа полета и психологическая нагрузка оптимизирована.
Переключатель 36 является автономным и позволяет диспетчеру посадки при необходимости возвращаться к любому этапу посадки независимо от пилота, например, при появлении в зоне захода на посадку другого ЛА или для контроля ВПП перед посадкой.
В то же время автономность работы пилота также повышена благодаря наличию на индикаторе пилота отображения рельефа, зоны аэропорта и транслировании диспетчеру посадки информации об этапе полета и масштабе дальности.
На основе КСП на фиг.1 осуществляется новый способ захода на посадку и посадки ЛА (см. фиг.2, 3).
Способ захода на посадку ЛА с использованием рассмотренной КСП, аналогично способу-прототипу [4], предусматривает использование на курсоглиссадных индикаторах диспетчера посадки и пилота (см. фиг.2) идентичных разверток с отображением линий курса 1 и глиссады 2, а также зон, ограниченных линиями равных отклонений от курса 4 и глиссады 5, при этом ЛА 6, 7 изображают в виде курсовых 8 и глиссадных 9 векторов, начало которых совпадает с центром радиолокационной отметки ЛА, а направление и длина указывают соответственно на направление и величину текущих курсовой и глисссадной скоростей. Одновременно непрерывно отображают векторы оптимальных курсовых 10 и глиссадных 11 скоростей, начала которых совмещены с радиолокационной отметкой ЛА, а направление соответствует оптимальной в данный момент скорости приближения ЛА к линиям курса и глиссады и движения по касательным к этим линиям.
При пилотировании совмещают направления векторов упомянутых текущих скоростей 8, 9 с направлениями соответствующих оптимальных скоростей 10, 11, регулируя одновременно длину векторов текущих скоростей до их совпадения с длинами оптимальных скоростей.
Отображают также границы реальной видимости - вертикальной 12 и горизонтальной 13 и сравнивают их с границами допустимых видимостей - вертикальной 14 и горизонтальной 15.
Однако в рассматриваемом заявляемом способе изменяют зону отображения линий курса и глиссады так, что зона отображения соответствует одному из трех основных этапов посадки, осуществляемых последовательно от захода на посадку до приземления.
Дальность первой зоны (Д1, фиг.2) ограничивают максимальной дальностью при заходе на посадку.
Дальность второй зоны (Д2, фиг.2) ограничивают дальностью при приближении к высоте принятия решения, при этом дальность Д2 выбирают несколько превышающей дальность, соответствующую высоте принятия решения (координате упомянутой высоты 17) для того, чтобы при приближении к этой высоте пилот успел проанализировать летную обстановку и принять решение о посадке или заходе на второй круг. Упомянутые превышения дальности целесообразно выбирать примерно равными произведению путевой скорости ЛА на время, необходимое для принятия решения.
Второй этап требует повышенного внимания пилота, поэтому отображение в масштабе, соответствующем высоте принятия решения (обычно 1,2 км), позволяет существенно снизить психологическое напряжение пилота.
На фиг. 2б отображения линий курса и глиссады на дальностях Д1 и Д2 совмещены с отображением рельефа в виде проекций соответственно по курсу (18) и глиссаде (19, 20); на проекции рельефа, совмещенной с глиссадой, при этом выделяют левые и правые части относительно курса - на фиг.2а это выделение рельефа проведено сплошной (19) и пунктирной (20) линиями. Наиболее эффективно для улучшения эргономических характеристик такое выделение проводить с помощью разных цветов, причем соответствующих левой и правой сторонам ВПП, т.е. красным и синим.
Целесообразно также для эффективной концентрации данных о рельефе отображать линию глиссады с синтезированной проекцией рельефа - учитывать максимальные высоты, сканируя рельеф с заданным шагом при отклонении от курса вправо и влево.
На фиг.2а отображена также линия допустимого отклонения от глиссады 21, которая характеризуется максимально допустимым отклонением от линии глиссады, необходимым для избежания столкновения с рельефом. Она располагается ниже глиссады 1 на расстоянии ΔН, которое целесообразно оценивать из соотношения
ΔH=VB·(τn·τc)
где VB - вертикальная скорость снижения,
τn - время реакции пилота,
nc - постоянная времени системы управления ЛА.
Так как местоположение ЛА всегда имеет некоторое отклонение от «идеальной» глиссады и VВ является переменной величиной, то линия допустимого отклонения 21 является «плавающей», т.е. ее положение может смещаться по оси β, но всегда должно располагаться выше уровня рельефа.
При приближении ЛА к точке прицеливания 16 (началу ВПП) производят переключение отображения на масштаб третьей зоны, определяемой длиной ВПП.
Отображение ВПП и обстановки аэропорта производят в координатах, определяемых базой аэропорта и радиолокатором обзора летного поля, поэтому отображение третьего этапа обычно производят в координатах, отличных от координат отображения первой и второй зоны, определяемых посадочным радиолокатором. Пример отображения обстановки аэропорта в районе ВПП приведен на фиг.3 (проекция по линии курса), где кроме ВПП 22, точки приземления 23 также отображаются движущиеся объекты вблизи ВПП 24 (автотранспорт, трапы, ориентиры, погрузочно-разгрузочные машины и т.д.).
Если при дальности Д2 - на этапе принятия решения - пилот принимает решение о заходе на второй круг, то он производит возврат к масштабу дальности Д1 и повторяет процесс отображения.
Синхронно с переключением масштаба на индикаторе пилота 9 пилот транслирует на землю сигнал, по которому переключается масштаб на индикаторе диспетчера 5. Таким образом, сохраняется идентичное отображение для пилота и диспетчера, обеспечивая эффективность их взаимодействия.
В то же время диспетчер имеет возможность при необходимости самостоятельно обратиться к любой зоне, например для наблюдения за ЛА, идущим тем же курсом, что и ведомый ЛА,
Заявленный способ конкретизирует работу КСП в направлении повышения информативности отображения и снижения психологической загрузки пилота и диспетчера.
Таким образом, в заявляемой КСП осуществляются новые схемные связи, реализующие сочетание новых признаков с известными. К последним можно отнести, например, отображение ВПП [7] и рельефа местности [8]. Сформированная новая совокупность признаков осуществляется новыми структурными связями, что определяет как новизну заявляемой КСП, так и новизну основанного на ее использовании способа.
Промышленная полезность определяется в данном случае повышением безопасности полетов ЛА.
Промышленная реализация КСП осуществлена аналогично прототипу на основе серийно-выпускаемых изделий.
Испытания, подтверждающие эффективность предложенной КСП и способа для повышения вероятности безаварийной работы, проводились с использованием самолета СУ-27.
Заявляемый КСП и способ посадки будут использованы при осуществлении посадки ЛА по высшей категории безопасности.
Расшифровка обозначений к фиг.1
1. Посадочный радиолокатор (ПРЛ).
2. Блок обработки информации.
3. Блок вычисления координат (БВК).
4. Наземный видеопреобразователь (НВП).
5. Индикатор диспетчера посадки.
6. Пульт диспетчера посадки.
7. Пилотажно-навигационный блок (ПНБ).
8. Бортовой видеопреобразователь (БВП).
9. Индикатор пилота.
10. Пульт пилота.
11. Линия радиосвязи.
12. Двусторонняя линия передачи данных (ДЛПД).
13. Наземный приемник.
14. Наземный передатчик.
15. Наземная антенная система.
16. Бортовой приемник.
17. Бортовой передатчик.
18. Бортовая антенная система.
19. Бортовой формирователь вектора текущей курсовой скорости.
20. Бортовой формирователь вектора текущей глиссадной скорости.
21. Наземный разделитель векторов курсовой и глиссадной скоростей.
22. Преобразователь параметров границ вертикальной и горизонтальной видимостей.
23. Формирователь вектора скорости ветра по курсу.
24. Формирователь вектора скорости ветра по глиссаде.
25. Бортовой формирователь вектора оптимальной курсовой скорости.
26. Бортовой формирователь вектора оптимальной глиссадной скорости.
27. Бортовой разделитель наземной информации.
28. Узел сопряжения информации.
29. Радиолокатор обзора летного поля.
30. Формирователь карты летного поля.
31. База данных аэропорта.
32. Наземная база данных рельефа.
33. Наземный формирователь проекций рельефа по курсу и глиссаде (НФПР).
34. Бортовая база данных рельефа.
35. Бортовой формирователь проекций рельефа по курсу и глиссаде (БФПР).
36. Наземный переключатель масштабов.
37. Бортовой переключатель масштабов.
Расшифровка обозначений к фиг.2, 3
1. Линия курса.
2. Линия глиссады.
3. Метки дальности.
4. Линии равных отклонений от курса.
5. Линии равных отклонений от глиссады.
6, 7. Отметки ЛА.
8. Вектор текущей курсовой скорости.
9. Вектор текущей глиссадной скорости.
10. Вектор оптимальной курсовой скорости.
11. Вектор оптимальной глиссадной скорости.
12. Граница реальной вертикальной видимости.
13. Граница реальной горизонтальной видимости.
14. Граница допустимой вертикальной видимости.
15. Граница допустимой горизонтальной видимости..
16. Точка прицеливания.
17. Координата высоты принятия решения о посадке.
18. Линии проекций рельефа по курсу.
19, 20. Линии проекций рельефа по глиссаде.
21. Линия допустимого отклонения от глиссады.
22. Взлетно-посадочная полоса (ВПП).
23. Точка приземления.
24. Движущиеся объекты вблизи ВПП.
Источники информации
1. Авиационная радионавигация. Справочник под ред. А.А.Сосновского. М., «Транспорт», 1990, стр. 151.
2. Заявка Франции 2752051, МПК 7 G 01 С 23/00, заявл. 02.08.96, опубл. 06.02.98.
3. Патент РФ 2200961, МПК 7 G 01 С 23/00, заявл. 14.04.2000, опубл. 20.03.03, Бюл. №8; МПК 7 G 01 С 23/00, заявл. 14.07.2000, опубл. 20.03.03, Бюл. №8.
4. Патент РФ 2239203, МПК 7 G 01 С 23/00, заявл. 02.04.2003, опубл. 27.10.04, Бюл. №10.
5. Крейцер А.В., Спиваковский A.M. Синергетические аспекты нечетной информации. В сборнике «Синергетика и методы науки» С-Пб, «Наука», 1998, стр. 28.
6. В.А. Ефанов, С.Д. Бодрунов. Пути повышения эффективности применения ЛА на базе быстросчетных моделей и средств искусственного интеллекта. «Мир авионики» №2, 2002, стр. 33-36.
7. Патент США 6018698, МПК 7 G 01 S 013/08, заявл. 23.06.1997, опубл. 25.01.00.
8. Патент США 5892462, МПК 6 G 08 G 5/04, заявл. 20.07.1997, опубл. 06.04.99.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2006 |
|
RU2341774C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2003 |
|
RU2239203C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2000 |
|
RU2200961C2 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2559196C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2011 |
|
RU2478523C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2267797C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ПОСАДКЕ НА НЕЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2546550C1 |
| Восьмицветная растровая оптическая система посадки | 2019 |
|
RU2743602C2 |
Группа изобретений относится к радиолокационным системам посадки летательных аппаратов (ЛА) и может быть использована в системах управления воздушным движением. Система содержит посадочный радиолокатор, блок обработки информации, блок вычисления координат, наземный и бортовой видеопреобразователи, индикаторы диспетчера посадки и пилота, пульты диспетчера посадки и пилота, пилотажно-навигационный блок, двустороннюю линию передачи данных, бортовые формирователи векторов текущей курсовой и глиссадной скоростей, наземный разделитель векторов курсовой и глиссадной скоростей, узлы метеоинформации, бортовые формирователи векторов оптимальной курсовой и глиссадной скоростей, бортовой разделитель наземной информации. Дополнительно использованы радиолокатор обзора летного поля, формирователь карты летного поля, базы данных аэропорта, рельефа, формирователи проекций рельефа, переключатели масштабов. Особенностью системы является совмещение отображений линий курса и глиссады с отображениями рельефа местности и карты летного поля в трех масштабах, определяемых различными этапами осуществления посадки. Способ посадки определяет порядок изменения зон отображения линий курса и глиссады в соответствии с изменяющейся дальностью при совмещении пилотом векторов текущих курсовой и глиссадной скоростей с соответствующими векторами оптимальных скоростей. Достигаемый технический результат - повышение безопасности полетов при заходе на посадку и ее осуществлении, снижение психологической нагрузки пилота и диспетчера. 2 н. и 5 з.п. ф-лы, 3 ил.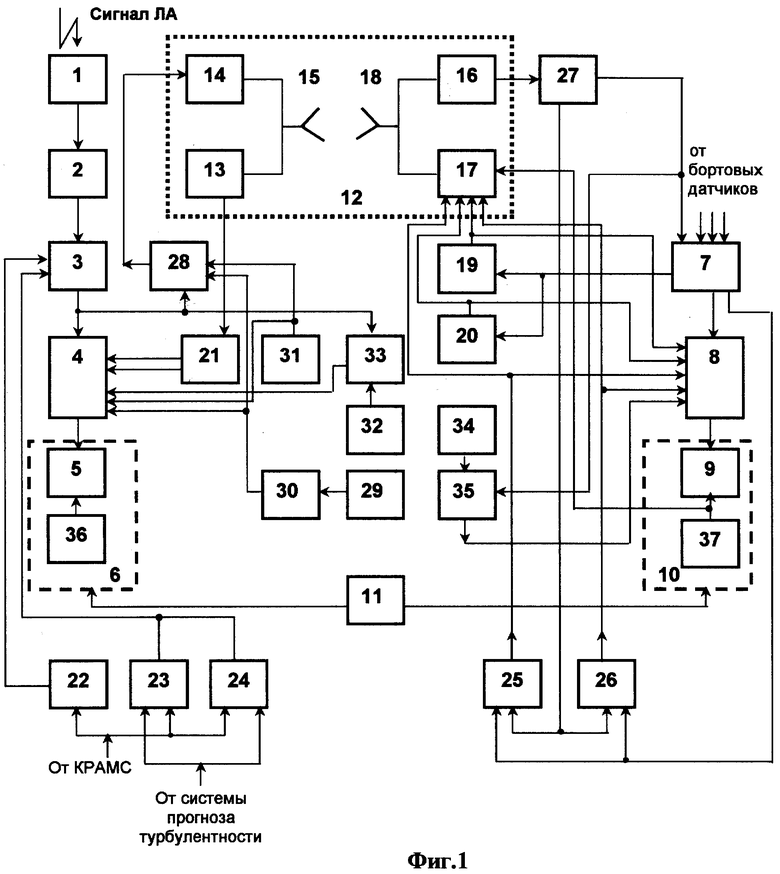
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2003 |
|
RU2239203C1 |
| СПОСОБ ЗАХОДА НА ПОСАДКУ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СИСТЕМА ЕГО ОБЕСПЕЧЕНИЯ | 1999 |
|
RU2156720C1 |
| RU 95111384 A1, 10.06.1997 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЗАХОДОМ НА ПОСАДКУ | 1991 |
|
RU1823356C |

