Изобретение относится к способу управления полетами и посадкой воздушных судов (ВС) в ближней зоне и зоне посадки аэродрома при помощи радиолокационной системы посадки.
Известны способы управления полетами и посадкой ВС в ближней зоне и зоне посадки аэродрома при помощи радиолокационных систем посадки (РСП), разработанных в РФ и за рубежом: РСП-6М2 [1], РСП-7 [2], РСП-10МН [3], мобильная система навигации, интеграции и координации воздушного движения AN/TPN-31 [4], тактическая система наблюдения и точного захода на посадку AN/MPN-25 [5, 6], стационарная РСП-27С и мобильная РСП-28М [6]. Данные РСП совместно с другими наземными радиотехническими средствами участвуют в обеспечении управления полетами в аэродромной зоне и посадкой ВС на взлетно-посадочную полосу (ВПП) аэродрома.
Способы управления полетами и посадкой ВС при помощи РСП-6М2 [1], РСП-7 [2] и РСП-10МН [3] разработаны для РСП, использующих зеркальные антенны с периодическим механическим движением, обеспечивающим циклическое сканирование воздушного пространства. Такое сканирования антенн позволяет РСП осуществлять равномерный последовательный обзор воздушного пространства, обнаружение и измерение координат обнаруженных ВС в контролируемой зоне с заданным периодом обновления.
Недостатком способов управления полетами и посадкой ВС при помощи указанных РСП является громоздкость конструкции, низкая эксплуатационная технологичность, практическая невозможность их серийного изготовления (ввиду морального устаревания элементной базы и материалов), недостаточная надежность, а также несоответствие точности измерения основных параметров положения (координат) и движения ВС требованиям современных нормативных документов РФ [7] и мировых стандартов (ICAO).
Другим недостатком данных способов управления полетами и посадкой ВС является отсутствие возможности организации ускоренного квазислучайного обзора воздушного пространства, неравномерного в плоскости сканирования с реализацией режима обнаружения и сопровождения ВС с укороченным, по сравнению с типичным периодом обзора 1 сек, интервалом обновления информации посадочного радиолокатора (ПРЛ), входящего в состав РСП. Такой режим ускоренного обзора позволяет улучшить энергетические и точностные характеристики по курсу и глиссаде ПРЛ в произвольном направлении в пределах его зоны действия на наиболее ответственном этапе посадки ВС - на плановой глиссаде снижения, а также реализовать режим слежения и сопровождения ВС, идущего на посадку.
Способ управления полетами и посадкой ВС при помощи посадочного канала системы навигации, интеграции и координации воздушного движения AN/TPN-31 или ATNAVICS (Air Traffic Navigation, Integration and Coordination System) [4] предполагает использование неподвижных курсовой и глиссадной активных фазированных антенных решеток (ФАР) на базе активных приемо-передающих модулей, позволяет, благодаря электронному сканированию, наряду с последовательным обзором осуществлять квазислучайный обзор воздушного пространства, предоставляющий возможность организации режима обнаружения и сопровождения ВС в любом произвольном направлении в пределах зоны действия с меняющимся и укороченным периодом обновления информации.
Недостатком способа управления полетами и посадкой ВС с посадочным каналом системы AN/TPN-31 является отсутствие возможности оперативной смены направления посадки вследствие наличия одной неподвижной комбинированной глиссадно-курсовой антенны, ориентированной вдоль только одного из двух возможных противоположных направлений посадки ВС на ВПП аэродрома.
Недостатком способа управления полетами и посадкой ВС с обзорным каналом системы AN/TPN-31 являются пониженные параметры зоны действия и точностных характеристик, обусловленные использованием упрощенной антенны диспетчерского радиолокатора (ДРЛ), входящего в состав системы AN/TPN-31, в целях достижения мобильности комплекса.
Способ управления полетами и посадки ВС при помощи посадочного канала действующей тактической системы наблюдения и точного захода на посадку AN/MPN-25 [5] производства американской компании ITT Exelis Radar, Reconnaissance & Undersea Systems разработан с использованием вращающейся антенны, совмещенной с антенной первичного канала ДРЛ, что не позволяет наряду с последовательным обзором осуществлять квазислучайный электронный обзор воздушного пространства.
Недостатком способа управления полетами и посадкой ВС с обзорным каналом системы AN/MPN-25 являются пониженные параметры зоны действия и точностных характеристик, обусловленные использованием упрощенной антенны диспетчерского радиолокатора (ДРЛ), совмещенной с антенной ПРЛ в целях достижения мобильности комплекса.
Способ управления полетами и посадкой ВС при помощи стационарной РСП-27С [6] относится к современным способам контроля воздушного пространства и предназначен для обеспечения решения задач контроля группой руководства полетами (ГРП) за воздушным движением в районе аэродрома и выдерживания воздушными судами заданной линии посадки по курсу и глиссаде.
Недостатком способа управления полетами и посадкой ВС при помощи РСП-27С является исключение возможности непосредственного управления полетами и посадкой ВС ввиду отсутствия в ее составе рабочих мест руководителя ближней зоны (РБЗ) и руководителя зоны посадки (РЗП) ГРП со станциями радиосвязи, что обуславливает использование РСП-27С только на стационарных аэродромах, имеющих стационарный командный диспетчерский пункт (КДП), оснащенный рабочими местами РБЗ, РЗП ГРП и станциями радиосвязи (СР).
Наиболее близким по технической сущности к предлагаемому способу управления полетами и посадкой ВС при помощи РСП является способ управления полетами и посадкой ВС при помощи мобильной РСП-28М (прототип) [6], в состав которой кроме ПРЛ и ДРЛ дополнительно входит модуль управления, содержащий рабочие места РБЗ, РЗП ГРП и станции радиосвязи, обеспечивающие оперативную передачу команд управления руководителей ГРП на борт воздушных судов, а также переговоры ГРП с экипажами ВС в целях обеспечения управления полетами и посадкой ВС [8].
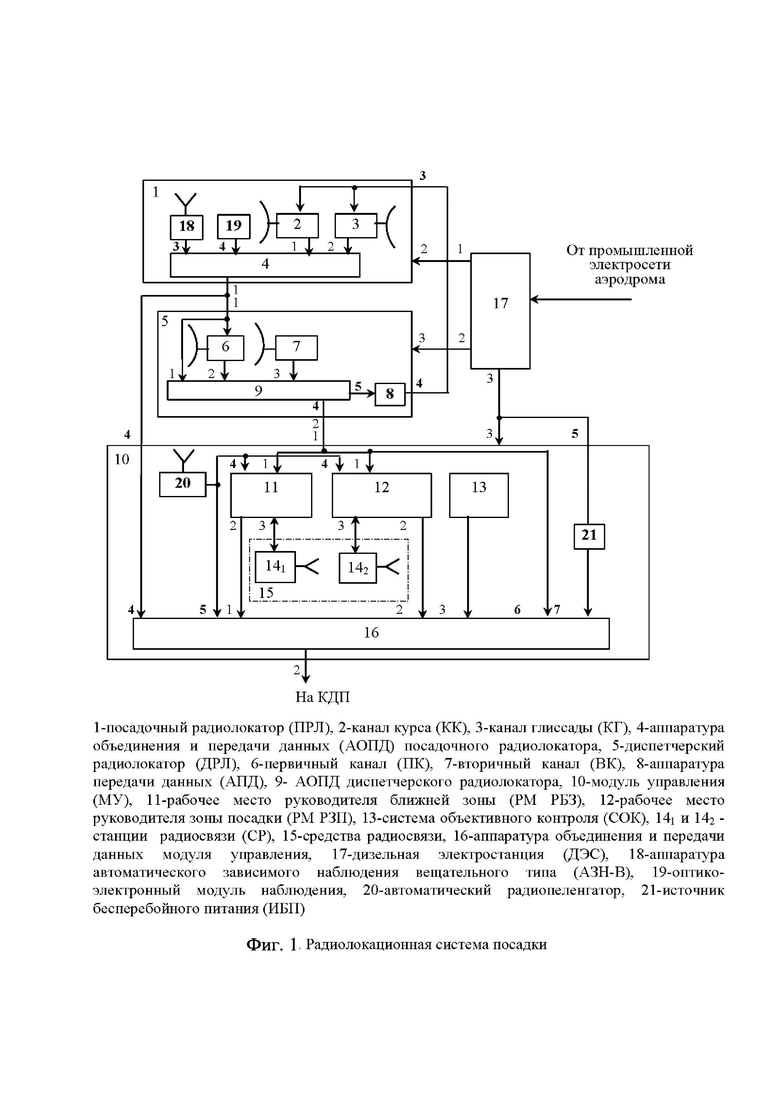
Мобильная РСП-28М содержит посадочный радиолокатор (1), состоящий из канала курса (2), канала глиссады (3) и аппаратуры объединения и передачи данных (АОПД) (4) посадочного радиолокатора (1), причем, выходы канала курса (2) и канала глиссады (3) подключены ко входам соответственно 1 и 2 АОПД (4), а выход АОПД (4) является выходом 1 ПРЛ (1), диспетчерский радиолокатор (ДРЛ) (5), состоящий из первичного канала (ПК) (6), вторичного канала (ВК) (7), автоматического радиопеленгатора (АРП) (8) и АОПД (9) диспетчерского радиолокатора, причем, вход ПК (6) является входом 1 ДРЛ (5) и подключен к выходу 1 ПРЛ (1) и входу 1 АОПД (9), выходы ПК (6), ВК (7) и АРП (8) подключены ко входам соответственно 2, 3 и 4 АОПД (9), а выход АОПД (9) является выходом 2 ДРЛ (5), модуль управления (МУ) (10), состоящий из рабочего места (РМ) руководителя ближней зоны (РБЗ) (11), рабочего места руководителя зоны посадки (РЗП) (12), причем, входы 1 РМ РБЗ (11) и РМ РЗП (12) соединены вместе, являются входом 1 МУ и подключены к выходу 2 ДРЛ (5), системы объективного контроля (СОК) (13), двух станций радиосвязи (СР) 141, 142 и (АОПД) (16) модуля управления, причем, выходы 2 РМ РБЗ (11), РМ РЗП (12) и выход СОК (13) соединены соответственно с входами 1, 2 и 3 АОПД (16) МУ (10), приемо-передающие выводы 3 РМ РБЗ (11) и РМ РЗП (12) подключены к приемо-передающим выводам соответственно СР 141 и 142, а выход АОПД (16) МУ (10) является выходом 2 МУ (10), дизельную электростанцию (ДЭС) (17), на вход которой подается первичное электропитание от промышленной электросети аэродрома, а выходы 1, 2 и 3 подключены соответственно к входу 2 ПРЛ (1), входу 3 ДРЛ (5) и входу 3 МУ (10) (фиг. 1) [8] .
В РСП-28М в качестве ПРЛ (1) используется серийный посадочный радиолокатор ПРЛ-27С, а в качестве ДРЛ (2) – серийный диспетчерский радиолокатор ДРЛ-27С.
ПРЛ (1) при помощи каналов курса (2) и глиссады (3) обеспечивает обнаружение и измерение сферических или прямоугольных координат обнаруженных ВС в зоне посадки аэродрома путем периодического (период обновления 1 сек) секторного сканирования пространства по азимуту относительно оси ВПП и по углу места относительно горизонтальной плоскости.
Выходная информация ПРЛ (1), содержащая координаты ВС, обнаруженных по каналам курса и глиссады в зоне посадки, при помощи АОПД (4) транслируется на ДРЛ (5) для использования в первичном канале (16) ДРЛ (5) и одновременной передачи на модуль управления (10).
ДРЛ (5) посредством первичного (6) и вторичного (7) радиолокационных каналов обеспечивает обнаружение, измерение полярных координат (дальность, азимут) обнаруженных ВС, получение данных о высоте полета и прочей сопутствующей бортовой информации ВС (номер, запас топлива, скорость и т.п.) в ближней зоне и зоне посадки аэродрома путем периодического кругового (в горизонтальной плоскости) сканирования пространства.
АРП (8) выполняет автоматическое измерение пеленгов воздушных судов, с которыми в текущий момент времени выполняются сеансы обмена речевыми сообщениями между экипажем ВС, РЗП и РБЗ путем использования станций радиосвязи, располагаемых на борту ВС, а также СР 141, 142 на рабочих местах РБЗ (11) и РЗП (12) модуля управления (10) РСП-28М.
Выходная информация ДРЛ (5), содержащая координаты и пеленги ВС, обнаруженных ПРЛ (1) и ДРЛ (5), при помощи АОПД (9) транслируется на МУ (10) для использования в целях управления полетами и посадкой ВС руководителями ближней зоны и зоны посадки соответственно на РМ РБЗ (11) РЗП (12), а также последующей ее передачи при помощи АОПД (16) МУ (10) на КДП аэродрома.
Модуль управления (10) благодаря установленным рабочим местам РЗП (11), РБЗ (12), СОК (13), станций радиосвязи 141, 142 и АОПД (16) обеспечивает:
- прием координатной информации и пеленгов ВС, обнаруженных ПРЛ (1) в зоне посадки, ДРЛ (5) в ближней зоне и зоне посадки аэродрома,
- управление полетами и посадкой обнаруженных ВС путем наблюдения воздушной обстановки в зоне посадки руководителем зоны посадки на РМ РЗП (11), в ближней зоне - руководителем зоны посадки на РМ РБЗ (12) и оперативной выдачи РБЗ и РЗП речевых команд и сообщений экипажам управляемых ВС посредством использования станций радиосвязи 141 и 142,
- объективный контроль текущей работы РЗП и РБЗ при помощи средств наблюдения и регистрации системы объективного контроля (13),
Выходная информация МУ (10), содержащая координаты и пеленги ВС, обнаруженных ПРЛ (1) и ДРЛ (5), а также выходные данные РМ РБЗ (11), РЗП (12) и СОК (13), при помощи АОПД (16) транслируется на КДП аэродрома для использования в целях наблюдения, регистрации, а также реализации запасного варианта управления полетами и посадкой ВС в случае необходимости при помощи резервной группы руководства полетами во главе со старшим руководителем полетов, находящимся на КДП.
Дизельная электростанция (17), благодаря использованию дизельных электрогенераторов, вырабатывает собственную электрическую энергию, по входу подключается к внешней промышленной электросети аэродрома для организации резервного электропитания. ДЭС по выходам 1, 2 и 3 обеспечивает первичным электропитанием соответственно ПРЛ (1), ДРЛ (5) и МУ (10).
Недостатком способа-прототипа, использующего РСП-28М, является ограниченное количество измерительных информационных каналов, выполняющих обнаружение и оценку параметров положения и движения ВС в наиболее ответственных областях воздушного пространства аэродрома – в ближней зоне и зоне посадки, что приводит к снижению потенциальных возможностей по достижению высоких показателей надежности и достоверности управления полетами и посадкой ВС при помощи РСП-28М.
Другими недостатками способа-прототипа, использующего РСП-28М, являются:
- расположение автоматического радиопеленгатора (8), измеряющего пеленги на ВС в составе диспетчерского радиолокатора (5), что обуславливает получение радиопеленгационной информации о ВС на КДП только при включенном и исправно работающем ДРЛ (5);
- последовательная 2-звенная трансляция на КДП радиолокационных данных посадочного радиолокатора (1) - через ДРЛ (5) и модуль управления (10), что обуславливает получение на КДП параметров положения (координат) и движения о ВС, идущих на посадку, от ПРЛ (1) только при включенных и исправно работающих ДРЛ (5) и МУ (10);
- отсутствие в посадочном радиолокаторе (1) текущей информации о ВС, обнаруженных диспетчерским радиолокатором (5) в ближней зоне, приближающихся к зоне посадки, а также непосредственно в зоне посадки ПРЛ (1), что снижает потенциальные вероятностные характеристики обнаружения ВС каналов курса и глиссады ПРЛ (1), работающего в составе РСП-28М;
- отсутствие возможности передачи на КДП аэродрома радиолокационной и радиопеленгационной информации при выходе из строя МУ (10) и исправно работающих ПРЛ (1), ДРЛ (5), а также при других вариантах работоспособности отдельных составных частей РСП-28М.
Техническая проблема, решение которой обеспечивается при использовании изобретения, заключается в создании способа управления полетами и посадкой воздушных судов при помощи радиолокационной системы посадки (РСП) с повышенной достоверностью обнаружения воздушных судов в ближней аэродромной зоне и зоне посадки РСП, а также обеспечивающего возможность передачи данных о параметрах положения и движения ВС на КДП при различных вариантах работоспособности составных частей РСП.
Техническим результатом предлагаемого изобретения является повышение достоверности и вероятностных характеристик обнаружения воздушных судов в ближней аэродромной зоне и зоне посадки РСП, а также обеспечение возможности передачи данных о параметрах положения и движения ВС на КДП при различных вариантах работоспособности составных частей РСП.
Технический результат достигается тем, что в способе управления полетами и посадкой воздушных судов (ВС) при помощи радиолокационной системы посадки, включающем получение данных о местоположении ВС в воздушном пространстве ближней аэродромной зоны с использованием посадочного радиолокатора (ПРЛ), состоящего из канала курса (КК), канала глиссады (КГ) и аппаратуры объединения и передачи данных (АОПД) ПРЛ, диспетчерского радиолокатора (ДРЛ), состоящего из первичного канала (ПК), вторичного канала (ВК) и АОПД ДРЛ, модуля управления (МУ), состоящего из рабочего места (РМ) руководителя ближней зоны (РБЗ), РМ руководителя зоны посадки (РЗП), системы объективного контроля (СОК), двух станций радиосвязи и АОПД МУ, дизельной электростанции (ДЭС), согласно изобретению используют аппаратуру автоматического зависимого наблюдения вещательного типа (АЗН-В) и оптико-электронный модуль (ОЭМ) наблюдения в ПРЛ, аппаратуру передачи данных (АПД) в ДРЛ, а также автоматический радиопеленгатор (АРП) и источник бесперебойного питания в МУ для осуществления следующих действий:
- обнаружение текущей информации о помехово-целевой обстановке и ВС при помощи ДРЛ в ближней зоне и зоне посадки ВС с дальнейшей ее передачей в ПРЛ при помощи АПД;
- передача выходной информации ПРЛ с выхода 1 на дополнительный вход 4 МУ с ее дальнейшей трансляцией через АОПД МУ на командный диспетчерский пункт (КДП) независимо от состояния работы ДРЛ и МУ;
- передача выходной информации ПРЛ, поступающей на вход ПК ДРЛ,
- выполнение равномерного кругового сканирования воздушного пространства в горизонтальной плоскости путем излучения высокочастотных (ВЧ) зондирующих сигналов (ЗС) по ПК и ВЧ запросных сигналов по ВК совмещенными антеннами ПК и ВК ДРЛ;
- передача на вход приемников ПК и ВК ДРЛ соответственно радиолокационных сигналов, образующиеся в результате отражений ВЧ ЗС от ВС, а также ответных сигналов бортовых ответчиков ВС, излучаемых при приеме запросных сигналов ВК,
- обнаружение и обработка радиолокационных сигналов ПК и ВК для измерения параметров положения (координат) и движения (скоростей) ВС, находящихся в зонах действия ПК и ВК ДРЛ;
- получение в ПК ДРЛ дополнительной информации от независимых источников ПРЛ – КК, КГ, АЗН-В и ОЭМ;
- передача объединенной выходной информации ДРЛ, содержащей параметры положения и движения ВС в зонах действия ПРЛ, ПК и ВК через АОПД с выхода 2 ДРЛ на вход 1 модуля управления;
- передача выходной информации ДРЛ с дополнительного выхода 4 через дополнительную АПД также на дополнительный вход 3 ПРЛ и далее на дополнительные входы КК и КГ;
- передача выходной информации РМ РБЗ, РМ РЗП и СОК на входы АОПД МУ;
- получение АРП, установленным в МУ, информации о пеленгах ВС для использования на РМ РБЗ, РЗП и транслирование ее на КДП независимо от состояния работоспособности ДРЛ;
- передача выходной информации ПРЛ через дополнительный вход 4 МУ на дополнительный вход 4 АОПД МУ напрямую;
- передача выходной информации АРП на дополнительный вход 5 АОПД МУ напрямую;
- передача выходной информации ДРЛ на дополнительный вход 6 АОПД МУ напрямую;
- введение в состав МУ источника бесперебойного питания (ИБП),
- подача первичного питания от ДЭС на вход 3 МУ, к которому подключен вход ИБП в составе МУ через дополнительный вход 5 с дальнейшей подачей бесперебойного электропитания на АОПД МУ.
Введение в состав ПРЛ (1) аппаратуры АЗН-В (18) позволяет организовать дополнительный канал обнаружения и получения координатной информации о ВС, оборудованных бортовой аппаратурой АЗН-В и находящихся в зонах действия ПРЛ (1), ДРЛ (5) и АРП (20) МУ (10) РСП.
Введение в состав ПРЛ (1) оптико-электронного модуля (19) позволяет организовать дополнительный канал обнаружения и получения точной координатной информации о положении ВС, идущих на посадку, на ближайшем к взлетно-посадочной полосе (ВПП) участке зоны посадки аэродрома, являющемся наиболее ответственным этапом посадки, а также воздушных судов, перемещающихся по ВПП аэродрома.
Преимуществом использования оптико-электронного модуля (19) в ПРЛ (1) является реализация возможности обнаружения и автоматического сопровождения ВС по дальности, азимуту и углу места с точной оценкой координат ВС не только в зоне посадки секторной зоны действия ПРЛ, но и в произвольном направлении. Например, при аварийной посадке ВС с отклонением от заданной линии посадки, в т.ч. за пределы секторной зоны действия ПРЛ.
Другим достоинством использования оптико-электронного модуля (19) в ПРЛ (1) является возможность выполнения работ по регламентной и текущей оперативной юстировке пространственного положения антенн курса и глиссады ПРЛ (1), а также организации текущего контроля погрешностей измерения угловых координат и дальности в каналах курса и глиссады ПРЛ (1).
Введение в состав ДРЛ (5) АПД (8) позволяет передавать в ПРЛ (1) текущую информацию о помехо-целевой обстановке и ВС, обнаруженных при помощи ДРЛ (5) в ближней зоне и зоне посадки ВС, в т.ч. в зоне действия каналов курса (2) и глиссады (3) ПРЛ (1), что обеспечивает в ПРЛ (1):
- предварительную подготовку к обнаружению ВС, перемещающихся из ближней зоны в зону посадки и зону действия ПРЛ (1);
- понижение уровня ложных тревог в зоне действия ПРЛ (1);
- увеличение вероятности правильного обнаружения ВС в зоне действия ПРЛ-2СТ.
Установка АРП (20) в модуле управления (10) создает условия для определения пеленга на ВС при выключенном или неисправном ДРЛ (5), а также непосредственной передачи радиопеленгационной информации от АРП на КДП при выключенном или неисправном модуле управления (10).
С целью реализации режима непосредственной передачи радиолокационной информации от ПРЛ (1), ДРЛ (5) и радиопеленгационной информации от АРП (10) на КДП в модуль управления (10) дополнительно устанавливается источник бесперебойного питания (21), подключаемый непосредственно к ДЭС (17). Благодаря ИБП (17), подключенной к ДЭС, радиолокационная информация от ПРЛ (1) и ДРЛ (5), а также радиопеленгационная информация от АРП (10) могут поступать на КДП для контроля и организации резервного управления полетами и посадкой ВС независимо от состояния работоспособности модуля управления (10).
Сущность технического решения поясняется фигурой, где на схеме радиолокационной системы посадки показаны следующие элементы:
1 - посадочный радиолокатор (ПРЛ),
2 - канал курса (КК),
3 - канал глиссады (КГ),
4 - аппаратура объединения и передачи данных (АОПД) посадочного радиолокатора,
5 - диспетчерский радиолокатор (ДРЛ),
6 - первичный канал (ПК),
7 - вторичный канал (ВК),
8 - аппаратура передачи данных (АПД),
9 - АОПД диспетчерского радиолокатора,
10 - модуль управления (МУ),
11 - рабочее место руководителя ближней зоны (РМ РБЗ),
12 - рабочее место руководителя зоны посадки (РМ РЗП),
13 - система объективного контроля (СОК),
141 и 142 - станции радиосвязи (СР),
15 - средства радиосвязи,
16 - аппаратура объединения и передачи данных модуля управления,
17 - дизельная электростанция (ДЭС)
18 - аппаратура автоматического зависимого наблюдения вещательного типа (АЗН-В),
19 – оптико-электронный модуль наблюдения,
20 - автоматический радиопеленгатор,
21 - источник бесперебойного питания (ИБП).
Способ управления полетами и посадкой ВС при помощи радиолокационной системы посадки, получающей данные о местоположении ВС в воздушном пространстве ближней аэродромной зоны с использованием посадочного радиолокатора (ПРЛ) (1),состоящего из канала курса (2), канала глиссады (3) и аппаратуры объединения и передачи данных (4) посадочного радиолокатора (1), причем, выходы канала курса (2) и канала глиссады (3) подключены ко входам соответственно 1 и 2 АОПД (4), а выход АОПД (4) является выходом 1 ПРЛ (1), диспетчерский радиолокатор (5), состоящий из первичного канала (6), вторичного канала (7) и АОПД (9) диспетчерского радиолокатора, причем, вход ПК (6) является входом 1 ДРЛ (5) и подключен к выходу 1 ПРЛ (1) и входу 1 АОПД (9), выходы ПК (6) и ВК (7) подключены ко входам соответственно 2 и 3 АОПД (9), а выход 4 АОПД (9) является выходом 2 ДРЛ (5), модуль управления (10), состоящий из рабочего места руководителя ближней зоны (11), рабочего места руководителя зоны посадки (12), причем, входы 1 РМ РБЗ (11) и РМ РЗП (12) соединены вместе, являются входом 1 МУ и подключены к выходу 2 ДРЛ (5), системы объективного контроля (13), двух станций радиосвязи 141, 142 и АОПД (16) модуля управления, причем, выходы 2 РМ РБЗ (11), РМ РЗП (12) и выход СОК (13) соединены соответственно с входами 1, 2 и 3 АОПД (16) МУ (10), приемо-передающие выводы 3 РМ РБЗ (11) и РМ РЗП (12) подключены к приемо-передающим выводам соответственно СР 141 и 142, а выход АОПД (16) МУ (10) является выходом 2 МУ (10), дизельную электростанцию (17), выходы 1, 2 и 3 которой подключены соответственно к входу 2 ПРЛ (1), входу 3 ДРЛ (5) и входу 3 МУ (10).
Используют дополнительное получение независимых данных о местоположении ВС в воздушном пространстве. Для этого используют посадочный радиолокатор (1), дополнительно содержащий аппаратуру автоматического зависимого наблюдения вещательного типа (АЗН-В) (18), выход которой подключается к дополнительному входу 3 АОПД (4) ПРЛ (1), оптико-электронный модуль наблюдения (19), выход которой подключается к дополнительному входу 4 АОПД (4) ПРЛ (1), диспетчерский радиолокатор (5), дополнительно содержащий аппаратуру передачи данных (8), вход которой подключается к дополнительному выходу 5 АОПД (9) ДРЛ (5), а выход является дополнительным выходом 4 ДРЛ (5) и подключается к объединенным входам канала курса (2) и канала глиссады (3) ПРЛ (1), образующим дополнительный вход 3 ПРЛ (1), причем, выход 1 ПРЛ (1) соединяется с дополнительным входом 4 АОПД (16) МУ (10), образующим дополнительный вход 4 МУ (10), модуль управления (10), дополнительно содержащий автоматический радиопеленгатор (20), выход которого подключается к дополнительному входу 5 АОПД (16) МУ (10) и к соединенным вместе дополнительным входам 4 РМ РБЗ (11) и РМ РЗП (12) МУ (10), причем, объединенные входы 1 РМ РБЗ (11) и РМ РЗП (12) подключаются к дополнительному входу 6 АОПД (16) МУ (10), источник бесперебойного питания (21), вход которого является дополнительным входом 4 МУ (10) и соединяется с входом 3 МУ (10), а выход подключается к дополнительному входу 7 АОПД (16) МУ (10).
Осуществление предлагаемого способа состоит в следующем.
Совмещенные антенны канала курса (КК) (2) и канала глиссады (КГ) (3) ПРЛ (1) выполняют равномерное секторное сканирование воздушного пространства относительно линии посадки с излучением высокочастотных (ВЧ) ортогональных (например, с круговой правой и левой поляризацией) зондирующих сигналов (ЗС) Х (~3 см) диапазона соответственно в горизонтальной и вертикальной плоскостях. Линия посадки располагается в вертикальной плоскости, проходящей через ось ВПП, под углом ~2-4 град. относительно горизонтальной плоскости, Радиолокационные сигналы, образующиеся в результате отражений ЗС КК и КГ от ВС, попадают на вход приемников соответственно КК и КГ, обнаруживаются и обрабатываются с целью измерения параметров положения и движения ВС, находящихся в зонах действия КК и КГ.
АЗН-В (18) с неподвижной антенной выполняет круговой прием ВЧ сигналов, периодически излучаемых ВС с бортовой аппаратурой АЗН-В в L (~30 см) диапазоне, идентичном ВК, и содержащих бортовую информацию о параметрах положения и движения ВС. Цель использования аппаратуры АЗН-В – прием ВЧ сигналов, содержащих текущие координаты ВС, находящихся в ближней зоне и зоне посадки аэродрома.
ОЭМ (19) выполняет наблюдение в оптическом и инфракрасном диапазонах за ВС, находящимися в ближней части зоны действия ПРЛ (1). Цель использования ОЭМ (19) – точное измерение текущих координат сопровождаемых ВС, идущих на посадку на наиболее ответственном этапе посадки, включающем ближайший к ВПП участок линии посадки, а также ВС, передвигающихся по ВПП аэродрома.
Объединенная выходная информация ПРЛ (1), содержащая параметры положения и движения ВС в зонах действия КК (2), КГ (3), АЗН-В (18) и ОЭМ (19), через АОПД (4) с выхода 1 ПРЛ (1) поступает на вход 1 ДРЛ (5).
В отличие от прототипа выходная информация ПРЛ (1) с выхода 1 поступает также на дополнительный вход 4 МУ (10) с целью ее дальнейшей трансляции через АОПД (16) МУ (10) на КДП независимо от состояния работы ДРЛ (5) и МУ (10).
Совмещенные антенны ПК (6) и ВК (7) ДРЛ (5) выполняют равномерное круговое сканирование воздушного пространства в горизонтальной плоскости с излучением ВЧ ЗС L (~23 см) или S (~10 см) диапазонов по ПК и ВЧ запросных сигналов L (~30 см) диапазона по ВК. Радиолокационные сигналы, образующиеся в результате отражений ВЧ ЗС от ВС, а также ответные сигналы бортовых ответчиков ВС, излучаемые при приеме запросных сигналов ВК, попадают на вход приемников соответственно ПК и ВК, обнаруживаются и обрабатываются с целью измерения параметров положения (координат) и движения (скоростей) ВС, находящихся в зонах действия ПК (6) и ВК (7) ДРЛ (5).
Выходная информация ПРЛ (1), поступающая на вход ПК (6) ДРЛ (5), обеспечивает повышение вероятностных характеристик обнаружения ВС в ближней зоне и зоне посадки зоны действия ПК (6) благодаря поступлению в ПК (6) дополнительной информации от независимых источников ПРЛ (1) – КК (2), КГ (3), АЗН-В (18) и ОЭМ (19).
Объединенная выходная информация ДРЛ (1), содержащая параметры положения и движения ВС в зонах действия ПРЛ (1), ПК (6) и ВК (7), через АОПД (9) с выхода 2 ДРЛ (5) поступает на вход 1 модуля управления (10).
В отличие от прототипа выходная информация ДРЛ (5) с дополнительного выхода 4 МУ (10) через дополнительную АПД (8) поступает также на дополнительный вход 3 ПРЛ (1) и далее на дополнительные входы КК (2) и КГ (3) для ее использования с целью повышения вероятностных характеристик обнаружения ВС в КК (2) и КГ (3) ПРЛ (1).
Модуль управления (10) благодаря установленным рабочим местам РБЗ (11) и РЗП (12), на которых во время штатной работы РСП располагаются РБЗ и РЗП, и станциям радиосвязи 141 и 142 обеспечивает управление полетами и посадкой ВС путем наблюдения на мониторах рабочих мест текущей помехо-целевой воздушной обстановки, выдачи речевых команд и обмена речевыми сообщениями с экипажами по оперативному управлению положением ВС.
СОК (13), установленная в МУ (10), обеспечивает текущий визуальный и аудио контроль над действиями РБЗ и РЗП с регистрацией (записью) поступающей информации.
Выходная информация РМ РБЗ (11) , РМ РЗП (12). СОК (13) поступает на входы АОПД (16) МУ (10).
В отличие от прототипа АРП (20) устанавливается в МУ (10), что позволяет получать информацию о пеленгах ВС для использования на РМ РБЗ, РЗП и транслировать ее на КДП независимо от состояния работоспособности ДРЛ (5).
В предлагаемом способе управления полетами и посадкой ВС при помощи РСП в отличие от прототипа:
- через дополнительный вход 4 МУ (10) на дополнительный вход 4 АОПД (16) напрямую подается выходная информация ПРЛ (1);
- на дополнительный вход 5 АОПД (16) напрямую подается выходная информация АРП (20);
- на дополнительный вход 6 АОПД (16) напрямую подается выходная информация ДРЛ (5);
- в состав МУ (10) введен источник бесперебойного питания (ИБП) (21), вход которого через дополнительный вход 5 МУ (10) подключен к входу 3, на который поступает первичное питание от ДЭС (17), что обеспечивает гарантированным электропитанием АОПД (16).
Подача на дополнительные входы АОПД (16) выходной информации ПРЛ (1), АРП (20) и ДРЛ (5), а также использование ИБП (21) позволяют выполнять трансляцию соответствующей информации на КДП независимо от состояния работоспособности ДРЛ (5) и МУ (10).
Установка в состав ПРЛ (1) РСП дополнительной аппаратуры АЗН-В (18) и оптико-электронного модуля (ОЭМ) (19) обеспечивает повышение вероятностных характеристик обнаружения ВС в ПРЛ (1).
В предлагаемо способе вероятностные характеристики обнаружения ВС в каналах курса и глиссады ПРЛ (1) определяются согласно критерию Неймана-Пирсона, при котором при фиксированной вероятности ложной тревоги в ходе обработки радиолокационных сигналов, принятых на фоне внутриприемных шумов и пассивных помех, добиваются получения максимальной вероятности правильного обнаружения ВС [9].
Будем полагать, что при фиксированной вероятности ложной тревоги исходная вероятность правильного обнаружения ВС объединенного канала курс-глиссада ПРЛ (1) равна Р1, а аналогичные вероятности правильного обнаружения ВС для аппаратуры АЗН-В (18) и ОЭМ (19) – соответственно Р2 и Р3.
Вероятности противоположных событий, заключающихся в пропуске, т.е. необнаружении ВС для каналов курс-глиссада (2)-(3), АЗН-В (18) и ОЭМ (19) определяются соответственно выражениями
q1 = 1- P1,
q2 = 1- P2, (1)
q3 = 1- P3.
Будем полагать, что при одновременной работе в ПРЛ (1) канала курс-глиссада (2)-(3), дополнительных каналов АЗН-В (18) и ОЭМ (19) воздушное судно обнаруживается при условии его обнаружения хотя бы в одном из указанных каналов.
Ввиду независимости процедур обнаружения ВС в каналах курс-глиссада (2)-(3), АЗН-В (18) и ОЭМ (19), вероятность обнаружения ВС хотя бы в одном из 3-х каналов ПРЛ (1) можно найти с использованием известного выражения [10]
Р1/3 = P1×P2×P3 + q1×P2×P3 + P1×q2×P3 + P1× P2×q3 +
+ q1×q2×P3 + q 1×P 2×q3 + P1×q2×q3. (2)
В частном случае при выполнении условий
P1=P2=P3=Р, (3)
q1=q2=q3=q
выражение (2) преобразуется к виду
Р1/3 = P3 + 3q×P2 + 3q2×P. (4)
Для характерного примера при Р=0,8 и q=0,2 из выражения (4) получим
Р1/3 = 0,992. (5)
Отметим, что при наличии в ПРЛ (1) 3-х каналов обнаружения (курс-глиссада, АЗН-В и ОЭМ) критерий обнаружения может сводиться к обнаружению сигналов ВС не менее чем в двух каналах, при котором для рассматриваемого примера получим
Как следует из выражений (4), (5) и (6), введение дополнительных каналов АЗН-В и ОЭМ обнаружения ВС обеспечивает повышение вероятности правильного обнаружения.
В частном случае для рассматриваемого примера при выполнении условий (3) вероятность правильного обнаружения ВС в ПРЛ с тремя каналами увеличивается от исходного значения P1=0,8 до величины:
- Р1/3 =0,992 при критерии обнаружения с учетом обнаружения ВС хотя бы в одном из 3-х каналов ПРЛ согласно (5),
- Р2/3 =0,896 при критерии обнаружения с учетом обнаружения ВС в 2-х или 3-х каналах ПРЛ согласно (6).
В отличие от прототипа выходная информация ПРЛ (1) подается не только в ДРЛ (5), но и одновременно на вход 4 АОПД (16) модуля управления (10), что позволяет через АОПД (16) МУ (10) выполнять трансляцию выходной информации ПРЛ (1) независимо от текущего состояния работы ДРЛ (5).
Введение в состав ДРЛ (5) аппаратуры передачи данных (8) позволяет передавать от ДРЛ (5) в каналы курса (2) и глиссады (3) ПРЛ (1) текущую информацию о положении и координатах воздушных судов, приближающихся к зоне посадки и обнаруженных диспетчерским радиолокатором (5) в ближней зоне, а также находящийся в зоне посадки, что повышает потенциальные вероятностные характеристики обнаружения ВС в каналах курса (2) и глиссады (3) ПРЛ (1), работающего в составе РСП.
Как и ранее, будем полагать, что при фиксированной вероятности ложной тревоги исходная вероятность правильного обнаружения ВС объединенного канала курс-глиссада ПРЛ равна Р1, а аналогичная вероятность правильного обнаружения ВС для аппаратуры ДРЛ равна РДРЛ.
Соответствующие вероятности противоположных событий, заключающихся в пропуске, т.е. необнаружении ВС для канала курс-глиссада и ДРЛ определяются соответственно выражениями
q1 = 1- P1, (7)
qДРЛ = 1- PДРЛ.
Будем полагать, что при одновременной работе в ПРЛ канала курс-глиссада и ДРЛ воздушное судно обнаруживается при условии его обнаружения хотя бы в одном из указанных каналов.
Ввиду независимости процедур обнаружения ВС в канале курс-глиссада и в ДРЛ, вероятность обнаружения ВС хотя бы в одном из каналов ПРЛ и ДРЛ можно найти с использованием выражения, аналогичного выражению (2)
Р1/2 = P1×PДРЛ + q1×PДРЛ + P1×qДРЛ. (8)
В частном случае при выполнении условий
P1=PДРЛ=РПД, (9)
q1=qДРЛ=qПД
выражение (8) преобразуется к виду
Р1/2 = PПД2 + 2qПД×PПД. (10)
Для характерного примера при РПД=0,8 и qПД=0,2, используя выражение (10), получим
Р1/2 =0,96. (11)
Как следует из выражения (11), дополнительная передача текущей информации об обнаруженных воздушных судах от ДРЛ (5) в каналы курса (2) и глиссады (3) ПРЛ (1), обеспечивает повышение вероятности правильного обнаружения ВС канала курс-глиссада.
В частном случае для рассматриваемого примера при выполнении условий (9) вероятность правильного обнаружения ВС в канале курс-глиссада ПРЛ увеличивается согласно выражению (11) с P1=0,8 до величины Р1/2 =0,96.
Выполним оценку степени повышения вероятности правильного обнаружения ВС в ПРЛ (1) при одновременном использовании каналов обнаружения курс-глиссада (2)-(3), АЗН-В (18) и ОЭМ (19) в ПРЛ (1), а также канала ДРЛ, по которому информация о ВС, обнаруженных в зоне действия ПРЛ, поступает от ДРЛ (5) в ПРЛ (1).
Для упрощения проведения оценки примем, что условия (3) и (9) выполняются, при этом вероятности правильного обнаружения РПД ВС и вероятности пропуска qПД по каналам курс-глиссада, АЗН-В, ОЭМ и ДРЛ соответственно равны между собой
Ввиду независимости процедур обнаружения ВС для общего случая в N каналах ПРЛ и ДРЛ, вероятность обнаружения ВС хотя бы в одном из N каналов можно найти с использованием известного выражения [10]
Р1/N =  , (12)
, (12)
где  – число сочетаний из N по (N-i),
– число сочетаний из N по (N-i),
i – целочисленный индекс, дополняющий количество каналов, по которым выполняется обнаружение ВС, до N, i = 0÷(N-1).
Для рассматриваемого случая N=4, когда ВС считается обнаруженным при его обнаружении хотя бы в одном из 4-х каналов курс-глиссада, АЗН-В, ОЭМ ПРЛ (1) и ДРЛ (5), выражение (12) примет вид
Р1/4 = 
 (13)
(13)
При PПД=0,8 и qПД=0,2 из выражения (13) получим
Р1/4 =0,9984. (14)
Как следует из выражения (14), дополнительная передача текущей информации об обнаруженных воздушных судах от ДРЛ (5) в ПРЛ (1) с учетом использования каналов АЗН-В (4) и ОЭМ (5) обеспечивает значительной повышение вероятности правильного обнаружения ВС в ПРЛ (1) Р1/4 =0,9984 по сравнению с исходной вероятностью обнаружения канала курс-глиссада P1=0,8.
В предлагаемом способе управления полетами и посадкой ВС при помощи РСП в качестве аппаратуры АЗН-В (18) может быть использована четырехканальная резервируемая наземная станция СОТА-X4 [11], в качестве оптико-электронного модуля (19) - оптико-электронный комплекс разведки и целеуказания типа «Астрон-4К» [12], в качестве ПРЛ (1) - посадочный радиолокатор ПРЛ-2СТ ТБИС.462414.022, в качестве ДРЛ (5) – серийный аэродромный обзорный радиолокатор АОРЛ-1АС ЕЛ1.231.020-17, изготавливаемый АО «ЧРЗ «Полет», а в качестве модуля управления (10) – кабина связи К-2СТ ТБИС.461212.001.
Посадочный радиолокатор ПРЛ-2СТ и кабина связи К-2СТ разработаны АО «ЧРЗ» Полет» в 2021 году и совместно с серийным аэродромным обзорным радиолокатором АОРЛ-1АС образуют перспективную радиолокационную систему посадки РСП-2СТ.
Эффективность нового способа управления полетами и посадкой ВС при помощи РСП подтверждена положительными результатами моделирования его применения при использовании новой радиолокационной системы посадки РСП-2СТ, разработанной в 2021 году в АО «ЧРЗ «Полет».
Использование способа управления полетами и посадкой ВС при помощи РСП-2СТ с дополнительными устройствами АЗН-В (18) и ОЭМ (19) в составе ПРЛ (1), АПД (8) в составе ДРЛ (5), а также АРП (20) и ИБП (21) в составе модуля управления (10) с дополнительным связями для передачи радиолокационной и радиопеленгационной информации позволяет повысить достоверность и вероятностные характеристики обнаружения воздушных судов в ПРЛ (1) и ДРЛ (2) РСП, обеспечить возможность трансляции радиолокационной, оптико-электронной информации от ПРЛ (1) и ДРЛ (5), а также радиопеленгационной информации от АРП (20) на КДП при различных вариантах работоспособности составных частей РСП.
Литература
1. Волков С.И., Каргапольцев А.А., Курилов Н.Н. Радиолокационная система посадки РСП-6М2: Учебное пособие. / Государственное образовательное учреждение высшего профессионального образования «Московский государственный институт радиотехники, электроники и автоматики (технический университет)». – М., 2010. – 153 с.
2. Описание РСП-7 [онлайн, найдено в Интернете на http://museum.radioscanner.ru/avionika/aviomuzejs/rsp_7/rsp_7.html ].
3. РСП-10МН. Радиолокационная система посадки. Техническое описание. ЕИ1.001.013ТО1 [онлайн, найдено в Интернете на https://booksee.org/book/614685 или https://studopedya.ru/2-49583.html ].
4. Описание AN/TPN-31 [онлайн, найдено в Интернете на https://www.radartutorial.eu/19.kartei/03.atc/karte047.ru.html или https://www.mobileradar.org/Documents/TPN-31.pdf ].
5. Tactical Area Surveillance and Precision Approach Landing System AN/MPN-25. [онлайн, найдено в Интернете на https://www.radartutorial.eu/19.kartei/03.atc/pubs/datasheet_MPN_25.pdf или
https://www.l3harris.com/all-capabilities/mpn-25-military-air-traffic ].
6. В.А. Воробьев, Д.А. Чистилин, А.Г. Попов. Краткий обзор и сравнительный анализ радиолокационных систем посадки РСП-27 и AN/MPN-25. «Воздушно-космические силы. Теория и практика», № 8, декабрь 2018, с. 67-76. [онлайн, найдено в Интернете на http://академия-ввс.рф/images/docs/vks/8-2018/67-76.pdf ].
7. Межгосударственный авиационный комитет. Авиационные правила. Часть 170 «Сертификация оборудования аэродромов и воздушных трасс» (АП-170). Том II «Сертификационные требования к оборудованию аэродромов и воздушных трасс». Издание третье, 2013.
8. Галкин Ф.Б., Синицын В.А., Синицын Е.А., Чернышков А.П. Радиолокационные системы посадки: Вестник БГТУ «Военмех». / ФГБ ОУ ВПО «Балтийский государственный технический университет» «Военмех» им. Д.Ф.Устинова. СПб., 2020, №12, с. 45-51.
9. Теоретические основы радиолокации. Учебное пособие для вузов / А.А. Коростелев, Н.Ф. Клюев, Ю.А. Мельник и др.; Под ред. В.Е. Дулевича. – 2-е издан., перераб. и доп. – М.: Сов. Радио, 1978. – 608 с.
10. Вентцель Е.С. Теория вероятностей: Учебник для вузов / Е.С. Вентцель. – 10-е издан., стер. – М.: Высш. шк., 2006. – 573 с.
11. Аппаратура автоматического зависимого наблюдения вещетельного типа СОТА-Х4 [онлайн, найдено в Интернете на http://npp-crts.ru/production/aznv/].
12. Астрон-4К. Оптико-электронный комплекс разведки и целеуказания [онлайн, найдено в Интернете на https://astrohn.ru/product/astrohn-4k/].
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационная система посадки | 2021 |
|
RU2779160C1 |
| Способ посадки воздушных судов при помощи посадочного радиолокатора | 2021 |
|
RU2780735C1 |
| Посадочный радиолокатор | 2021 |
|
RU2779294C1 |
| Посадочный радиолокатор | 2019 |
|
RU2721785C1 |
| ПОСАДОЧНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2556708C1 |
| Активная радиолокационная система захода и посадки | 2019 |
|
RU2705855C1 |
| Система захода и посадки на взлётно-посадочную полосу воздушного судна с бортовой РЛС | 2019 |
|
RU2728208C1 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАВОДА НА ПОСАДКУ | 2000 |
|
RU2200961C2 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС РАДИОЛОКАЦИОННОЙ АППАРАТУРЫ | 2001 |
|
RU2199719C1 |
Изобретение относится к способу управления полетами и посадкой воздушных судов (ВС) в ближней зоне и зоне посадки аэродрома при помощи радиолокационной системы посадки. Техническим результатом является повышение вероятностных характеристик, достоверности обнаружения, наблюдения и сопровождения ВС, выполняющих полеты и посадку в воздушном пространстве ближней аэродромной зоны, а также обеспечение возможности получения и передачи данных о параметрах положения и движения ВС на командный диспетчерский пункт аэродрома при различных вариантах работоспособности составных частей радиолокационной системы посадки. Упомянутый технический результат достигается тем, что согласно способу управления полетами и посадкой воздушных судов (ВС) при помощи радиолокационной системы посадки, включающему получение данных о местоположении ВС в воздушном пространстве ближней аэродромной зоны с использованием посадочного радиолокатора (ПРЛ), состоящего из канала курса, канала глиссады и аппаратуры объединения и передачи данных (АОПД) ПРЛ, диспетчерского радиолокатора (ДРЛ), состоящего из первичного канала, вторичного канала и АОПД ДРЛ, модуля управления (МУ), состоящего из рабочего места (РМ) руководителя ближней зоны, РМ руководителя зоны посадки, системы объективного контроля, двух станций радиосвязи и АОПД МУ, используют дополнительное получение независимых данных о местоположении ВС в воздушном пространстве путем введения аппаратуры автоматического зависимого наблюдения вещательного типа и оптико-электронного модуля наблюдения в ПРЛ, аппаратуры передачи данных в ДРЛ, а также автоматического радиопеленгатора и источника бесперебойного питания в МУ. 1 ил.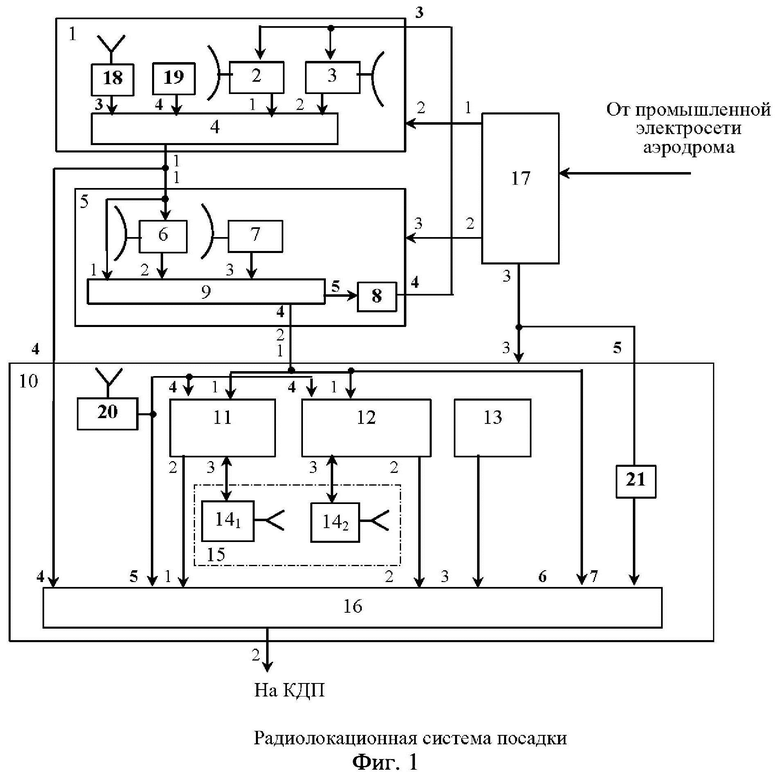
Способ управления полетами и посадкой воздушных судов (ВС) при помощи радиолокационной системы посадки, включающий получение данных о местоположении ВС в воздушном пространстве ближней аэродромной зоны с использованием посадочного радиолокатора (ПРЛ), состоящего из канала курса (КК), канала глиссады (КГ) и аппаратуры объединения и передачи данных (АОПД) ПРЛ, диспетчерского радиолокатора (ДРЛ), состоящего из первичного канала (ПК), вторичного канала (ВК) и АОПД ДРЛ, модуля управления (МУ), состоящего из рабочего места (РМ) руководителя ближней зоны (РБЗ), РМ руководителя зоны посадки (РЗП), системы объективного контроля (СОК), двух станций радиосвязи и АОПД МУ, дизельной электростанции (ДЭС), отличающийся тем, что используют аппаратуру автоматического зависимого наблюдения вещательного типа (АЗН-В) и оптико-электронный модуль (ОЭМ) наблюдения в ПРЛ, аппаратуру передачи данных (АПД) в ДРЛ, а также автоматический радиопеленгатор (АРП) и источник бесперебойного питания в МУ для осуществления следующих действий:
- обнаружение текущей информации о помехово-целевой обстановке и ВС при помощи ДРЛ в ближней зоне и зоне посадки ВС с дальнейшей ее передачей в ПРЛ при помощи АПД;
- передача выходной информации ПРЛ с выхода (1) на дополнительный вход (4) МУ с ее дальнейшей трансляцией через АОПД МУ на командный диспетчерский пункт (КДП) независимо от состояния работы ДРЛ и МУ;
- передача выходной информации ПРЛ, поступающей на вход ПК ДРЛ;
- выполнение равномерного кругового сканирования воздушного пространства в горизонтальной плоскости путем излучения высокочастотных (ВЧ) зондирующих сигналов (ЗС) по ПК и ВЧ запросных сигналов по ВК совмещенными антеннами ПК и ВК ДРЛ;
- передача на вход приемников ПК и ВК ДРЛ соответственно радиолокационных сигналов, образующихся в результате отражений ВЧ ЗС от ВС, а также ответных сигналов бортовых ответчиков ВС, излучаемых при приеме запросных сигналов ВК;
- обнаружение и обработка радиолокационных сигналов ПК и ВК для измерения координат и скоростей ВС, находящихся в зонах действия ПК и ВК ДРЛ;
- получение в ПК ДРЛ дополнительной информации от независимых источников ПРЛ – КК, КГ, АЗН-В и ОЭМ;
- передача объединенной выходной информации ДРЛ, содержащей измеренные координаты и скорости ВС в зонах действия ПРЛ, ПК и ВК через АОПД с выхода (2) ДРЛ на вход (1) модуля управления;
- передача выходной информации ДРЛ с дополнительного выхода (4) МУ через дополнительную АПД также на дополнительный вход (3) ПРЛ и далее на дополнительные входы КК и КГ;
- передача выходной информации РМ РБЗ, РМ РЗП и СОК на входы АОПД МУ;
- получение АРП, установленным в МУ, информации о пеленгах ВС для использования на РМ РБЗ, РЗП и транслирование ее на КДП независимо от состояния работоспособности ДРЛ;
- передача выходной информации ПРЛ через дополнительный вход (4) МУ на дополнительный вход (4) АОПД МУ напрямую;
- передача выходной информации АРП на дополнительный вход (5) АОПД МУ напрямую;
- передача выходной информации ДРЛ на дополнительный вход (6) АОПД МУ напрямую;
- введение в состав МУ 10 источника бесперебойного питания (ИБП);
- подача первичного питания от ДЭС на вход (3) МУ, к которому подключен вход ИБП в составе МУ через дополнительный вход (5), с дальнейшей подачей бесперебойного электропитания на АОПД МУ.
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |
| Аэродромный радиолокационный комплекс управления воздушным движением | 2016 |
|
RU2697504C2 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| Способ подсочки лиственницы | 1961 |
|
SU151147A1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| US 20210358310 A1, 18.11.2021 | |||
| US 20210132634 A1, 06.05.2021 | |||
| Кузьменков, В | |||
| Ю.: Применение оптико-электронных измерений в посадочном радиолокаторе / Радиотехнические и телекоммуникационные системы | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| - | |||
