Изобретение относится к лесомелиорации, в частности к механическому удалению древесно-кустарниковой растительности хвойных и лиственных пород, и может быть использовано при проведении лесоводственных уходов в лесных культурах при лесовосстановлении на вырубках.
Известна машина для заготовки деревьев с корнями (А.с. СССР № 409678; МПК А01G 23/02, А01G 23/08; опубл. 05.01.74), включающая в себя самоходное шасси с манипулятором, на конце которого установлена поворотная стойка, при этом в верхней части поворотной стойки расположен захват с приводом, а в нижней – горизонтальная, изогнутая в средней части балка с домкратами, вибратором и челюстным захватом.
Основными недостатками данной машины являются необходимость в наличии около корчуемого дерева опорной площади для предварительной установки манипулятора с домкратами и вибратором с целью очистки корневой системы от почвы, а также нецелесообразность применения машины для удаления тонкомерной поросли.
Известен манипулятор лесосечной машины (А.с. СССР № 623731; МПК B25J 5/00; опубл. 15.09.78), содержащий поворотную платформу с шарнирно связанной с ней стрелой, к которой последовательно шарнирно присоединены рукоять и захватное устройство, а также приводы, например, в виде гидроцилиндров, при этом с целью упрощения процесса управления движениями манипулятора один из гидроцилиндров шарнирно соединен с рукоятью и поворотной платформой, а другой – с рукоятью и стрелой.
Основными недостатками известного манипулятора являются сложность конструкции и ограниченность (в части горизонтального перемещения захватного устройства) выполняемых функций.
Известен манипулятор для лесозаготовительных работ (Пат. РФ № 2438854; МПК B25J 5/00, A01G 23/08; опубл. 10.01.2012), включающий в себя стрелу, рукоять, сочлененную посредством шарнирного соединения со стрелой, рабочий орган, прикрепленный к рукояти посредством шарнирного соединения, и систему управления, включающую гидроцилиндры привода стрелы, гидроцилиндр привода рукояти и гидроцилиндр привода рабочего органа, при этом гидроцилиндры привода стрелы установлены на балке, одним концом соединенной посредством шарнирного соединения с поворотной частью базовой машины, а другим – опирающейся на управляемое приводом колесо.
Недостатком данного манипулятора является необходимость в наличии в горизонтальной плоскости свободного пространства при осуществлении предварительной подготовки площадки для управляемого колеса с целью установки манипулятора в рабочем положении, что снижает мобильность базовой машины и, как следствие, уменьшает производительность выполняемых работ.
Известен манипулятор лесозаготовительной машины (Пат. РФ № 2090392; МПК B60P 3/40; опубл. 20.09.97), включающий в себя колонну с механизмом ее поворота, шарнирно сочлененные стрелу и рукоять и гидроцилиндры их управления, при этом манипулятор снабжен съемным упором, закрепленным на рукояти, и длина съемного упора больше ширины рукояти. Для погрузки или разгрузки сортиментов на рукояти устанавливается грейферный захват.
Основным недостатком известного манипулятора является невозможность ограничения съемным упором продольных колебаний грейферного захвата, устанавливаемого на рукояти манипулятора, в моменты подъема и перемещения им груза.
Известен манипулятор лесозаготовительной машины (А.с. СССР № 1299953; B66C 23/64, B25J 18/00; опубл. 30.03.87), включающий в себя опорно-поворотное устройство, на котором установлена стрела с телескопической рукоятью, выполненной из внутренней и наружной секций, при этом положение внутренней секции телескопической рукояти регулируется приводом от гидроцилиндра, захват, гидроцилиндр привода стрелы, гидроцилиндр привода телескопической рукояти и гидроцилиндры привода захвата. На наружной секции телескопической рукояти на оси смонтированы двойные Г-образные фиксаторы с пальцами и приводом. Между плечами двойных Г-образных фиксаторов установлены пружины растяжения и сжатия, при этом на внутренней секции телескопической рукояти выполнены отверстия с втулками, а пружины растяжения и сжатия удерживают в них пальцы двойных Г-образных фиксаторов. Для предотвращения полного самопроизвольного выдвижения внутренней секции телескопической рукояти из наружной на коренном конце внутренней секции в плоскости, перпендикулярной оси пальцев двойных Г-образных фиксаторов, в стакане установлены концевые подпружиненные фиксаторы. Принят за прототип.
Недостатками известного манипулятора являются сложность конструкции, выражающаяся в большом количестве элементов привода и фиксации внутренней секции телескопической рукояти, возможность обрыва пружин растяжения элементов фиксации внутренней секции, необходимость предварительной регулировки пружин сжатия и расположения телескопической рукояти в определенном положении для обеспечения ее выдвижения или задвижения под действием силы тяжести, а также невозможность осуществления вибрирования внутренней секции телескопической рукояти манипулятора с закрепленным на ней захватом, что ограничивает область применения манипулятора (например, не позволяет использовать его при выдергивании нежелательной древесно-кустарниковой растительности с корневой системой).
Технической задачей, на решение которой направлено заявляемое изобретение, является упрощение конструкции и повышение надежности манипулятора, а также расширение области его применения.
Это достигается тем, что манипулятор лесохозяйственной машины, включающий в себя опорно-поворотное устройство, на котором установлена стрела с телескопической рукоятью, выполненной из внутренней и наружной секций, при этом положение внутренней секции телескопической рукояти регулируется приводом от гидроцилиндра, захват, гидроцилиндр привода стрелы, гидроцилиндр привода телескопической рукояти и гидроцилиндры привода захвата, согласно изобретению, дополнительно содержит гидропульсатор, подсоединенный к гидросистеме лесохозяйственной машины через отдельную секцию распределителя, при этом полости гидроцилиндра положения внутренней секции телескопической рукояти соединены с гидропульсатором через обратные клапаны, кроме того, для ограничения колебаний захвата в продольной плоскости захват соединен с наружной секцией телескопической рукояти при помощи ограничителя, выполненного в виде троса, длина которого обеспечивает вертикальное положение захвата при горизонтальном положении полностью выдвинутой внутренней секции телескопической рукояти.
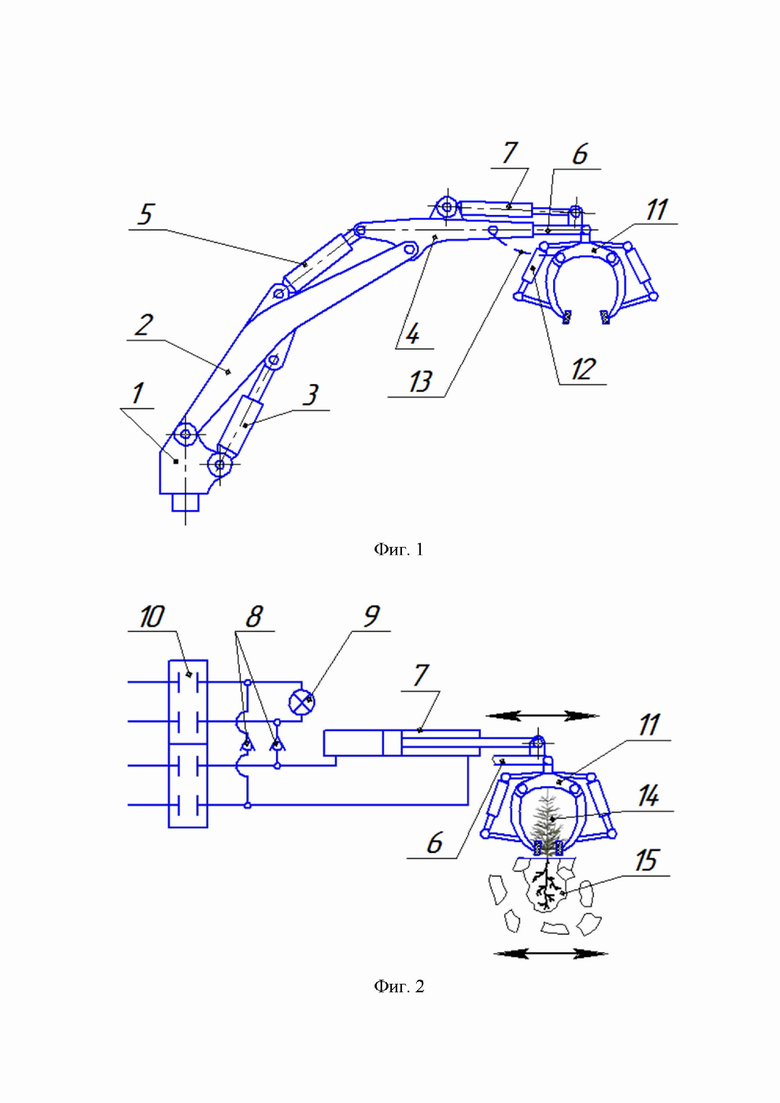
На фиг. 1 представлен общий вид манипулятора лесохозяйственной машины; на фиг. 2 – схема гидравлической системы управления колебанием внутренней секции телескопической рукояти манипулятора; на фиг. 3 – схема рабочего процесса манипулятора лесохозяйственной машины при удалении нежелательной древесно-кустарниковой растительности.
Манипулятор лесохозяйственной машины включает в себя опорно-поворотное устройство 1, установленную на нем стрелу 2 с приводом от гидроцилиндра 3 и телескопической рукоятью 4 с приводом от гидроцилиндра 5. Телескопическая рукоять 4 выполнена из внутренней 6 и наружной секций, при этом положение внутренней секции 6 телескопической рукояти 4 регулируется приводом от гидроцилиндра 7, полости которого соединены через обратные клапаны 8 с гидропульсатором 9, который подсоединен к гидросистеме лесохозяйственной машины через отдельную секцию распределителя 10. К телескопической рукояти 4 прикреплен захват 11 с приводом от гидроцилиндров 12, при этом для ограничения колебаний захвата 11 в продольной плоскости захват 11 соединен с наружной секцией телескопической рукояти 4 при помощи ограничителя 13, выполненного в виде троса, длина которого обеспечивает вертикальное положение захвата 11 при горизонтальном положении полностью выдвинутой внутренней секции 6 телескопической рукояти 4.
Манипулятор лесохозяйственной машины работает следующим образом.
На очищаемой территории осуществляют передвижение лесохозяйственной машины с установленным на ней манипулятором к произрастающей древесно-кустарниковой растительности 14. Затем приводится в движение опорно-поворотное устройство 1, а гидроцилиндрами 3, 5 и 7 – установленная на опорно-поворотном устройстве 1 стрела 2, телескопическая рукоять 4 и внутренняя секция 6 телескопической рукояти 4, при этом захват 11 размещается вокруг древесно-кустарниковой растительности 14. После этого, приводя в действие гидроцилиндры 12, выполняют захват древесно-кустарниковой растительности 14 захватом 11, гидроцилиндрами 3 и 5 приводят в движение стрелу 2 и телескопическую рукоять 4 и осуществляют механическое удаление древесно-кустарниковой растительности 14 посредством ее выдергивания с корневой системой и комом почвы 15.
Выдернутая с корневой системой древесно-кустарниковая растительность 14 отряхивается от кома почвы 15 за счет вибрации, создаваемой гидроцилиндром 7 положения внутренней секции 6 телескопической рукояти 4. Для этого осуществляют подачу рабочей жидкости от отдельной секции распределителя 10 лесохозяйственной машины через гидропульсатор 9 и обратные клапаны 8 в виде пульсирующего потока, энергия которого превращается в механическую вибрацию внутренней секции 6 телескопической рукояти 4. В результате вибрации ком почвы 15 разрушается, при этом вибрация на оператора лесохозяйственной машины не передается, так как вибрирующая внутренняя секция 6 телескопической рукояти 4 свободно перемещается в своих направляющих, а чрезмерные возвратно-вращательные движения захвата 11 с древесно-кустарниковой растительностью 14 в продольной плоскости лесохозяйственной машины погашаются ограничителем 13.
После окончания процесса очистки корневой системы древесно-кустарниковой растительности 14 от кома почвы 15 выключают отдельную секцию распределителя 10 лесохозяйственной машины, и рабочая жидкость к гидроцилиндру 7 положения внутренней секции 6 телескопической рукояти 4 подается мимо гидропульсатора 9, который отключается и прекращает создавать пульсирующий поток рабочей жидкости.
Такое исполнение заявляемого манипулятора лесохозяйственной машины позволяет упростить конструкцию, повысить надежность и, кроме того, использовать его при удалении нежелательной древесно-кустарниковой растительности на вырубках, что увеличит производительность машинно-тракторных агрегатов вследствие выдергивания древесно-кустарниковой растительности с корневой системой, тем самым, обеспечивая уменьшение (вплоть до полного исключения) необходимости повторной обработки ранее очищенных территорий, а также повысит качество удаления нежелательной древесно-кустарниковой растительности вследствие вибрационной очистки ее корневой системы от кома почвы, что способствует уменьшению доли ручного труда работников лесохозяйственных организаций, сокращению затрат на вывоз и последующую утилизацию порубочных остатков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированный агрегат биомелиорации земель с переработкой лесокустарника для утилизации щепы, древесной золы и подсева семян | 2020 |
|
RU2740173C1 |
| ЛЕСНАЯ МАШИНА | 2013 |
|
RU2535162C1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 1996 |
|
RU2127038C1 |
| Способ биомелиорации неиспользуемых деградированных земель с низкой несущей способностью при окультуривании почв для восстановления агропроизводства и устройство для его осуществления | 2022 |
|
RU2789864C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| Комбинированный агрегат биомелиорации неиспользуемых сельскохозяйственных угодий в степной, черноземной, сухостепной, полупустынных зонах | 2022 |
|
RU2792138C1 |
| МАНИПУЛЯТОР | 2007 |
|
RU2356827C1 |
| РЕКУПЕРАТИВНЫЙ ГИДРОПРИВОД ЛЕСНОГО МАНИПУЛЯТОРА | 2011 |
|
RU2461182C1 |
| Стрела грузоподъемного средства | 2022 |
|
RU2784541C1 |
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2242115C2 |

Изобретение относится к области лесного хозяйства. Манипулятор лесохозяйственной машины содержит опорно-поворотное устройство (1), на котором установлена стрела (2) с телескопической рукоятью (4), выполненной из внутренней (6) и наружной секций, и захват (11) с приводными гидроцилиндрами (12). Привод стрелы (2) осуществляется гидроцилиндром (3), а привод телескопической рукояти (4) – гидроцилиндром (5). Положение внутренней секции (6) телескопической рукояти (4) регулируется приводом от гидроцилиндра (7). К гидросистеме лесохозяйственной машины через отдельную секцию распределителя подсоединен гидропульсатор. Полости гидроцилиндра (7) положения внутренней секции (6) телескопической рукояти (4) соединены с гидропульсатором через обратные клапаны. Для ограничения колебаний захвата (11) в продольной плоскости, захват (11) соединен с наружной секцией (6) телескопической рукояти (4) при помощи ограничителя (13), выполненного в виде троса, длина которого обеспечивает вертикальное положение захвата (11) при горизонтальном положении полностью выдвинутой внутренней секции (6) телескопической рукояти (4). Обеспечивается упрощение конструкции и повышение надежности манипулятора, а также расширение области его применения. 3 ил.
Манипулятор лесохозяйственной машины, включающий в себя опорно-поворотное устройство, на котором установлена стрела с телескопической рукоятью, выполненной из внутренней и наружной секций, при этом положение внутренней секции телескопической рукояти регулируется приводом от гидроцилиндра, захват, гидроцилиндр привода стрелы, гидроцилиндр привода телескопической рукояти и гидроцилиндры привода захвата, отличающийся тем, что дополнительно содержит гидропульсатор, подсоединенный к гидросистеме лесохозяйственной машины через отдельную секцию распределителя, при этом полости гидроцилиндра положения внутренней секции телескопической рукояти соединены с гидропульсатором через обратные клапаны, кроме того, для ограничения колебаний захвата в продольной плоскости, захват соединен с наружной секцией телескопической рукояти при помощи ограничителя, выполненного в виде троса, длина которого обеспечивает вертикальное положение захвата при горизонтальном положении полностью выдвинутой внутренней секции телескопической рукояти.
| SU 1299953 A1, 30.03.1987 | |||
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА ДЛЯ ВАЛКИ ДЕРЕВЬЕВ С КОМЛЕМ | 1993 |
|
RU2065689C1 |
| BR 8806647 A, 31.07.1990 | |||
| РУЧНОЙ КУХОННЫЙ ЭЛЕКТРОБЫТОВОЙ ПРИБОР С НАКЛАДНЫМ ЛИЦЕВЫМ ЭЛЕМЕНТОМ | 2013 |
|
RU2606179C2 |
| US 4403427 A, 13.09.1983. | |||

