Изобретение относится к лесному машиностроению и может быть использовано в лесном хозяйстве при обработке растущих деревьев (срезание нижних ветвей при уходе за деревом, обрезка кроны при ландшафтной лесообработке, заготовка черенков с элитных деревьев и др.) и при заготовке сортиментов непосредственно со стоящих деревьев, отведенных в рубку.
Известна машина для обработки деревьев на базе автомобильного подъемника АГП-28 (см. книгу: Мазуркин П.М., Пинчук В.М., Котиков В.И. Манипуляторные кусторезы. Йошкар-Ола: издание МарПИ, 1992, с.87, рис. 5.10), включающая трелевочный трактор, подъемник типа АГП, поворотную платформу, штангу, рабочий орган.
Недостатком является сложность наводки рабочего органа одновременно двумя гидроцилиндрами подъемника, из-за чего снижается маневренность манипулирования и низкая маневренность в лесу.
Известен также манипулятор машины для обработки деревьев по патенту №2135347, содержащий стрелу, телескопическую рукоять с шарнирно-сочлененной фермой из взаимосвязанных пантографных двухзвенников, гидроцилиндров перемещения телескопической рукояти и стрелы.
Недостатком является сложность наводки рабочего органа одновременно двумя гидроцилиндрами (стрелы и рукояти) манипулятора, из-за чего снижается маневренность манипулирования.
Технический результат - повышение маневренности манипулятора при доставке рабочего органа вертикальным перемещением к месту обработки.
Этот технический результат достигается тем, что на противоположном конце опорной секции шарнирно закреплено коромысло. Коромысло через тягу шарнирно соединено со стрелой. Коромысло соединено также с платформой машины шарнирно через кулису.
Опорные шарниры платформы расположены вертикально, что позволяет создавать вышки-подъемники на короткобазовых колесных шасси. При этом рабочий орган в виде люльки или пильный механизм будет подниматься вдоль ствола дерева.
Сущность технического решения заключается в том, что манипулятор управляется одним гидроцилиндром вместо двух, что упрощает вертикальную доставку рабочего органа к месту обработки, например, растущего дерева.
Совокупность функционально-конструктивных признаков, изложенных в техническом решении, позволяет управлять манипулятором при помощи одного гидроцилиндра при вертикальной доставке рабочего органа к месту обработки, например, растущего дерева.
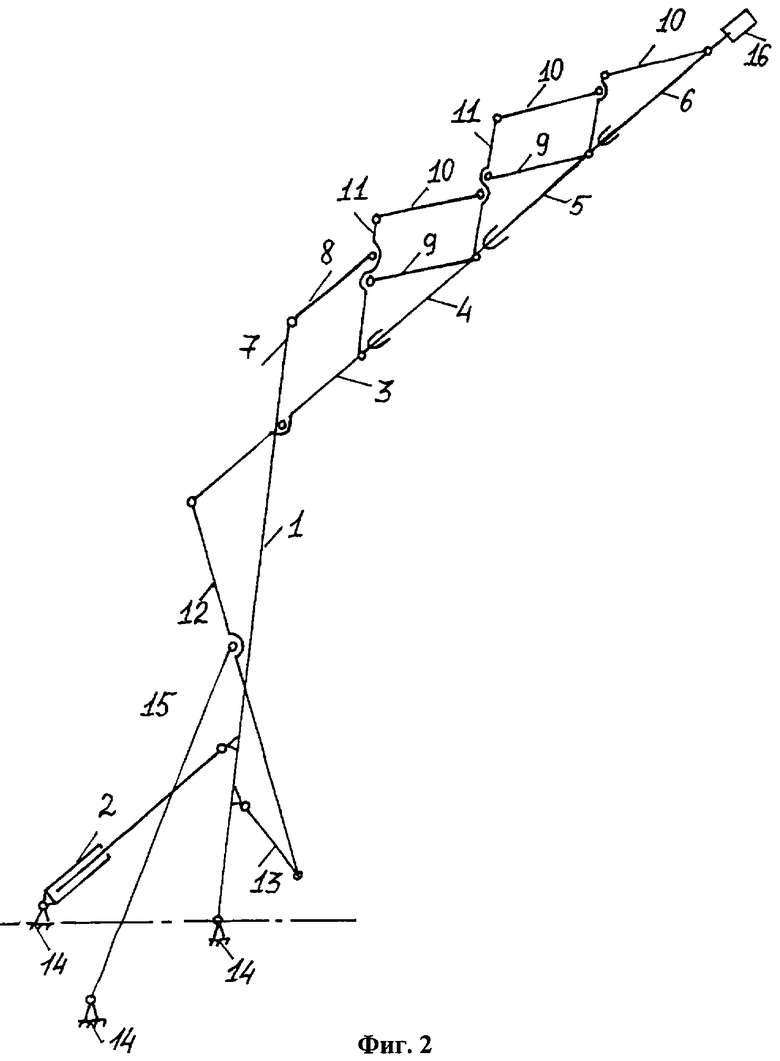
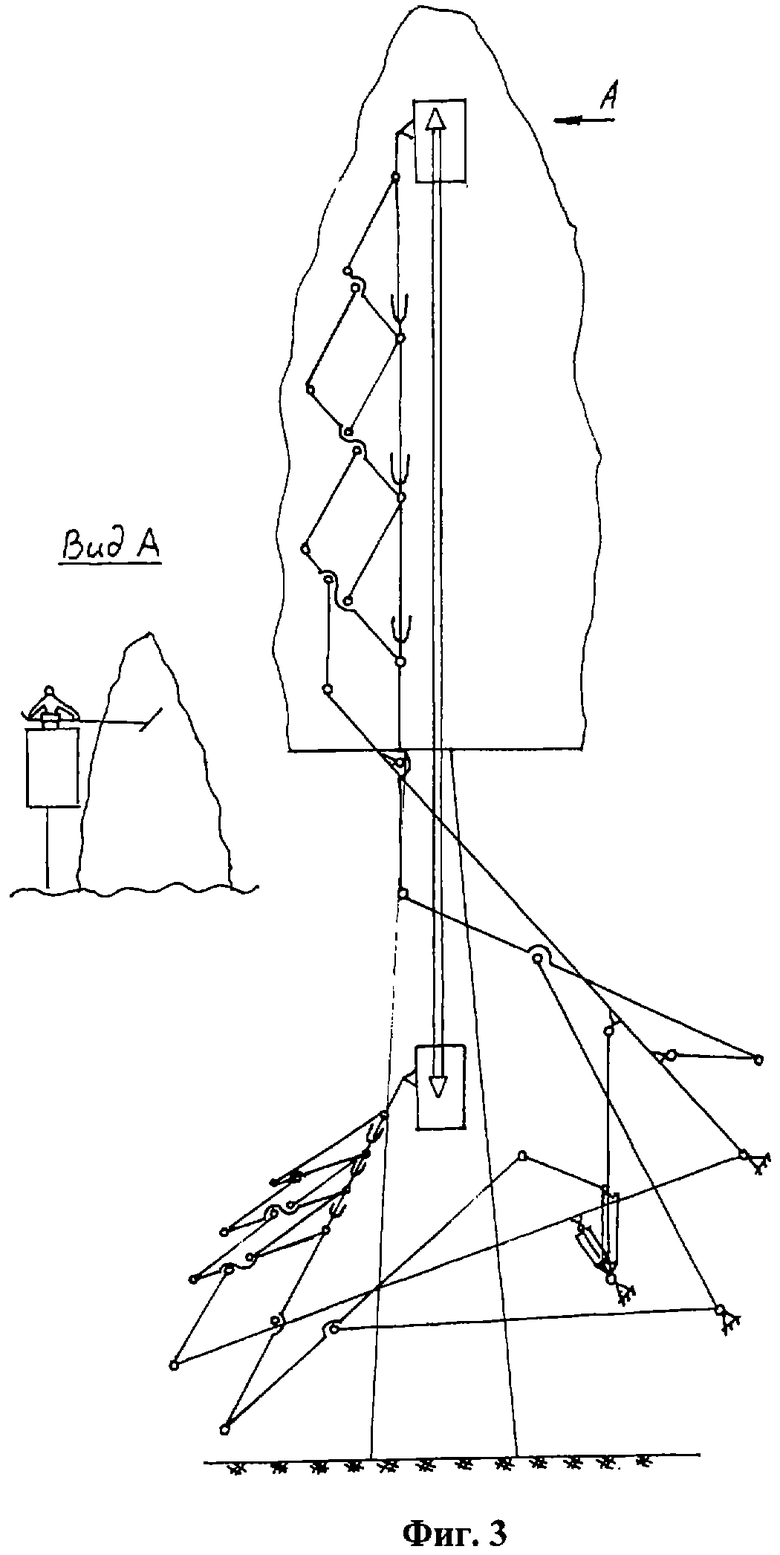
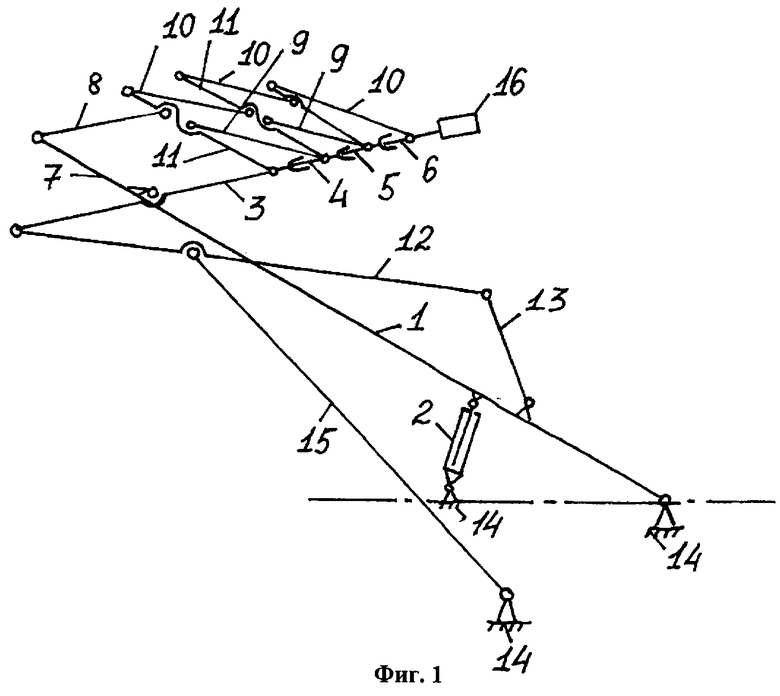
На фиг.1 показана схема конструкции манипулятора для обработки деревьев (при втянутом положении подвижных секций телескопической рукояти), на фиг.2 - то же, при вытянутом положении подвижных секций телескопической рукояти, на фиг.3 показана траектория вертикального движения рабочего органа.
Манипулятор машины для обработки деревьев включает стрелу 1, гидроцилиндр 2 перемещения стрелы. К стреле шарнирно прикреплена телескопическая рукоять с опорной секцией 3 и подвижными секциями 4, 5 и 6. На гуське 7 стрелы шарнирно закреплена тяга 8, соединенная с шарнирно-сочлененной фермой. Ферма содержит двухзвенники. Каждый двухзвенник, кроме последнего, снабжен дополнительным звеном 9, которое установлено параллельно второму звену 10 двухзвенника и соединено с первым поворотным звеном 11 соседнего двухзвенника для образования пантографа. Шарнирно-сочлененная ферма, опорная секция 3 и подвижные секции 4, 5 и 6 совместно образуют телескопическую рукоять. На противоположном конце опорной секции 3 шарнирно закреплено коромысло 12, которое через тягу 13 шарнирно соединено со стрелой 1. Коромысло 12 соединено также с платформой 14 машины шарнирно через кулису 15. На конце рукояти установлен рабочий орган 16. Стрела 1 и гидроцилиндр 2 установлены на платформе 14 машины.
Манипулятор машины работает следующим образом.
Рабочий орган 16 необходимо доставить, например, на заданную высоту при вертикальном перемещении. Для этого поворотом платформы 14 машины и гидроцилиндром 2 устанавливают стрелу 1. При этом кулиса 15 изменяет положение тяги 13 посредством коромысла 12. Одновременно опорная секция 3 телескопической рукояти поворачивается относительно оси крепления к стреле. При этом тяга 8 воздействует на шарнирно-сочлененную ферму, двухзвенники которой выдвигают подвижные секции 4, 5 и 6 относительно опорной секции 3 телескопической рукояти.
При втягивании штока гидроцилиндра 1 общая рукоять складывается, а стрела занимает первоначальное положение.
Предложенное изобретение позволяет создавать машины для вертикальной доставки люльки с рабочим или с рабочим органом на заданную высоту.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2251479C2 |
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 1998 |
|
RU2135347C1 |
| МАШИНА ЛЕСОЗАГОТОВИТЕЛЬНАЯ | 1998 |
|
RU2141755C1 |
| ВАЛОЧНО-РАСКРЯЖЕВОЧНАЯ МАШИНА | 1992 |
|
RU2044466C1 |
| Манипулятор лесохозяйственной машины | 2022 |
|
RU2780834C1 |
| Манипулятор | 1978 |
|
SU815279A1 |
| Манипулятор | 1980 |
|
SU897495A1 |
| Валочно-пакетирующая машина | 1973 |
|
SU447134A1 |
| МАШИНА ДЛЯ РУБКИ ДЕРЕВЬЕВ | 1990 |
|
RU2016505C1 |
| Лесозаготовительная машина | 1981 |
|
SU973077A1 |
Изобретение относится к лесному машиностроению и может быть использовано в лесном хозяйстве при обработке растущих деревьев. Манипулятор машины для обработки деревьев содержит стрелу, телескопическую рукоять. На рукояти установлены шарнирно-сочлененная ферма из взаимосвязанных двухзвенников, гидроцилиндр перемещения стрелы. На противоположном конце опорной секции телескопической рукояти закреплено коромысло, которое через тягу шарнирно соединено со стрелой и через кулису с платформой машины. Для перемещения рабочего органа по вертикали шарниры опор на платформе машины установлены также относительно друг друга по вертикали. Изобретение повышает маневренность манипулятора при доставке рабочего органа вертикальным перемещением к месту обработки. 1 з.п. ф-лы, 3 ил.
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 1998 |
|
RU2135347C1 |
| РУЧНОЙ КУХОННЫЙ ЭЛЕКТРОБЫТОВОЙ ПРИБОР С НАКЛАДНЫМ ЛИЦЕВЫМ ЭЛЕМЕНТОМ | 2013 |
|
RU2606179C2 |
| МАШИНА ДЛЯ БЕСЧОКЕРНОИ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 0 |
|
SU178601A1 |

