Изобретение относится к сельскохозяйственному машиностроению, в частности к грузоподъемной технике.
Известно устройство для поворота и изменения вылета стрелы крана, содержащее основание, раму, шарнирно установленные на ней под утлом друг к другу гидроцилиндры, штоки которых шарнирно соединены между собой и со стрелой, установленной на раме поворотной в горизонтальной плоскости оси с возможностью поворота в вертикальной плоскости, в котором, с целью расширения зоны действия и снижения динамических нагрузок, рама выполнена в виде Т-образной фермы, на концах горизонтальной перекладины которой закреплены корпуса гидроцилиндров, а вертикальная стойка фермы выполнена пустотелой для закрепления внутри нее поворотной оси, при этом ферма установлена на основании с возможностью поворота в горизонтальней плоскости посредством дополнительного привода, взаимодействующего с наружной поверхностью вертикальной стойки; дополнительный привод выполнен в виде гидровинтового механизма, включающего закрепленную на наружной поверхности вертикальной стойки Т-образной фермы обойму и размещенный внутри нее поршень с центральным отверстием, охватывающие вертикальную стойку, установленный с возможностью перемещения вдоль оси последней, зафиксированный от поворота вокруг нее и взаимодействующий с ней посредством винтовой нарезки, выполненной на сопрягаемых поверхностях поршня и стойки (SU, авторское свидетельство N 1813697, МПК5 B 66 C 23/82. Устройство для поворота и изменения вылета стрелы крана //Герасун В.М, Корсаков А. А. , Пындак В.И., Рогачев А.Ф., Строков В.Л. Заявлено 11.03.1991, опубликовано 07.05.1993).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, относятся ограниченная зона обслуживания в горизонтальной плоскости и сложность конструкции дополнительного привода.
Наиболее близким устройством того же назначения к заявленному объекту по совокупности признаков является манипулятор, содержащий плоское основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси основания опорно-поворотную колонку со смонтированными шарнирно на ней стрелой, рукоять с грузозахватным крюком, попарно установленные силовые гидроцилиндры управления стрелой и рукоятью и механизм поворота опорно-поворотной колонки кинематически связанного гидроприводом управления, содержащего гидроцилиндры (см. Навесной манипулятор "Волгоградский" //Инф. листок Волгоградского ЦНТИ N 230-97. Составители: В. М. Герасун, В.И. Пындак, А.Ф. Рогачев. - Волгоград. - 1997. - 4 с.).
К причинам, препятствующим достижению требуемого технического результата при использовании известного устройства, принятого за ближайший аналог, относятся ограниченная зона обслуживания в горизонтальной плоскости шарнирно-сочлененной стрелы и рукояти и неудовлетворительные динамические и кинематические характеристики механизма поворота.
Сущность изобретения заключается в следующем.
Задача, на решение которой направлено заявляемое изобретение, - расширение зоны обслуживания.
Технический результат - повышение диапазона углов поворота стрелы и вылета рукояти, упрощение конструкции и снижение динамических нагрузок на крайних участках поворота колонки.
Указанный технический результат при осуществлении изобретения достигается тем, что в известном манипуляторе, содержащем основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси опорно-поворотную колонку со смонтированной на ней стрелой, рукоять с грузозахватным крюком и гидропривод управления, включающий в себя гидроцилиндры и кинематически связанный с механизмом опорно-поворотной колонки, в заявленном манипуляторе согласно изобретению рукоять снабжена подвижными средней и внутренней частями, фиксируемыми относительно друг друга и рукояти, грузозахватный крюк смонтирован на свободном конце подвижной внутренней части, гидропривод управления опорно-поворотной колонкой размещен на вершине плоского основания, а механизм поворота содержит двуплечий рычаг, ось поворота которого совмещена с вертикальной осью поворота этой колонки, при этом гидроцилиндры упомянутого гидропривода расположены разнонаправленно и соединены своими штоками с дополнительными рычагами, один из которых закреплен на плоском основании, а другой - на поворотной колонке; свободные концы подвижных средней и внутренней частей рукояти снабжены парами оппозитно установленных ручек; он снабжен съемными пальцами для фиксации положения подвижных частей рукояти; рукоять, средняя и внутренняя подвижные части выполнены полыми и взаимно сопрягаемыми между собой своими соответствующими внешними и внутренними поверхностями; подвижные части рукояти снабжены попарно установленными упорами предельных положений.
За счет того, что рукоять стрелы снабжена подвижными частями, а опорно-поворотная колонка - механизмом ее поворота, обеспечивающим ее поворот в горизонтальной плоскости на угол не менее ± 90o от продольно-вертикальной плоскости, достигается указанный выше технический результат.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного изобретения, позволил установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения.
Следовательно, заявленное изобретение соответствует требованию "новизна" по действующему законодательству.
Для проверки соответствия заявленного изобретения требованию "изобретательского уровня" заявитель провел дополнительный поиск известных решений с целью выявления признаков, совпадающих с отличительными от ближайшего аналога признаками заявленного изобретения, результаты которого показывают, что заявленное изобретение не следует для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителем, не выявлено влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение технического результата.
Следовательно, заявленное изобретение соответствует требованию "изобретательский уровень" по действующему законодательству.
Изобретение поясняется чертежами.
На фиг. 1 схематично в аксонометрическом изображении представлен манипулятор.
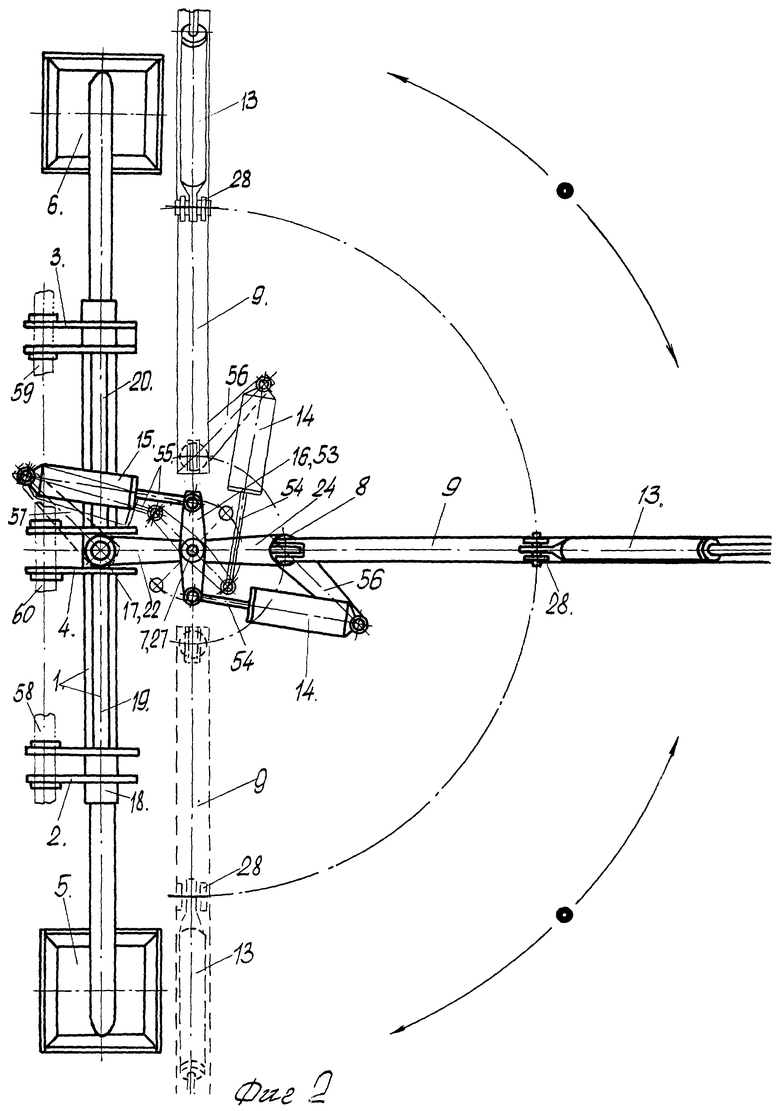
На фиг. 2 - то же, вид в плане.
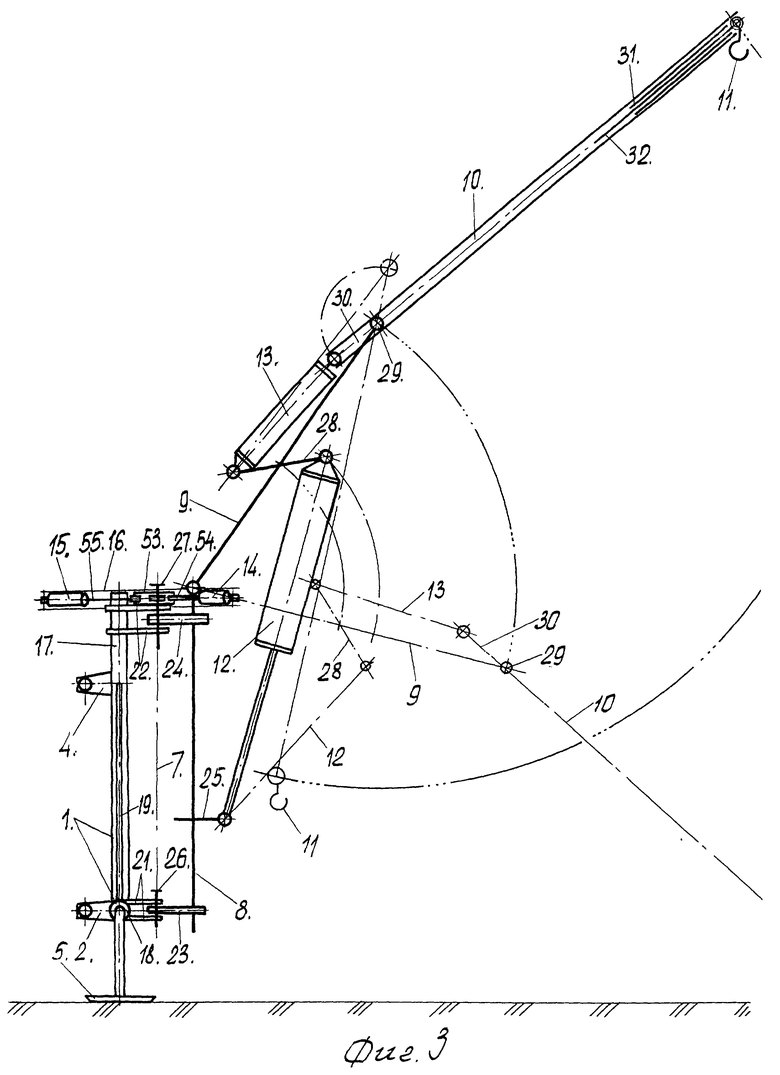
На фиг. 3 - то же, вид сбоку.
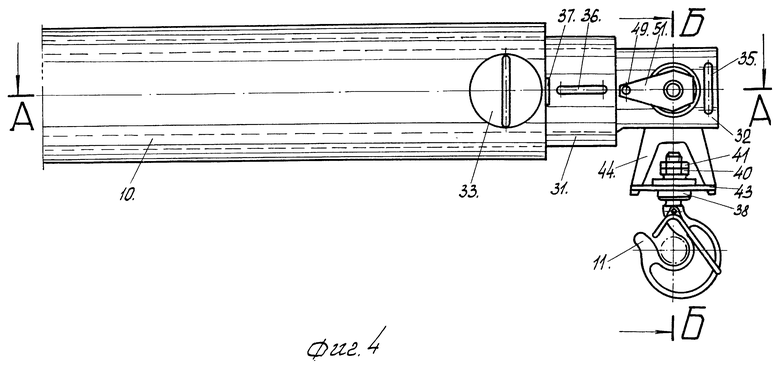
На фиг. 4 изображен конечный участок рукояти с крюковым захватом, вид справа.
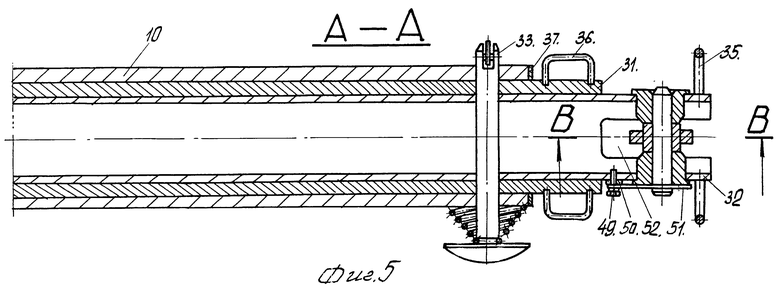
На фиг. 5 - сечение А-А на фиг. 4, диаметральное сечение полости рукояти со средней и внутренней подвижными частями.
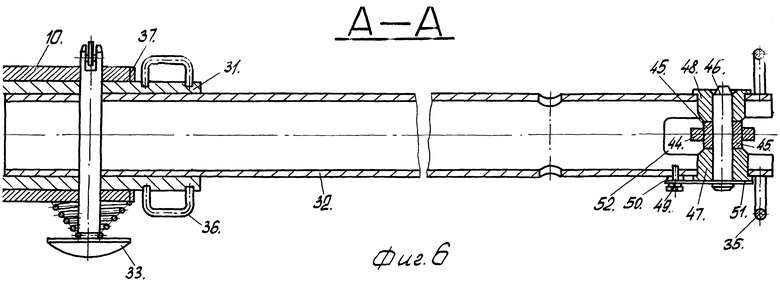
На фиг. 6 - то же, при выдвинутой внутренней части рукояти.
На фиг. 7 - то же, при выдвинутых внутренней и средней частях рукояти.
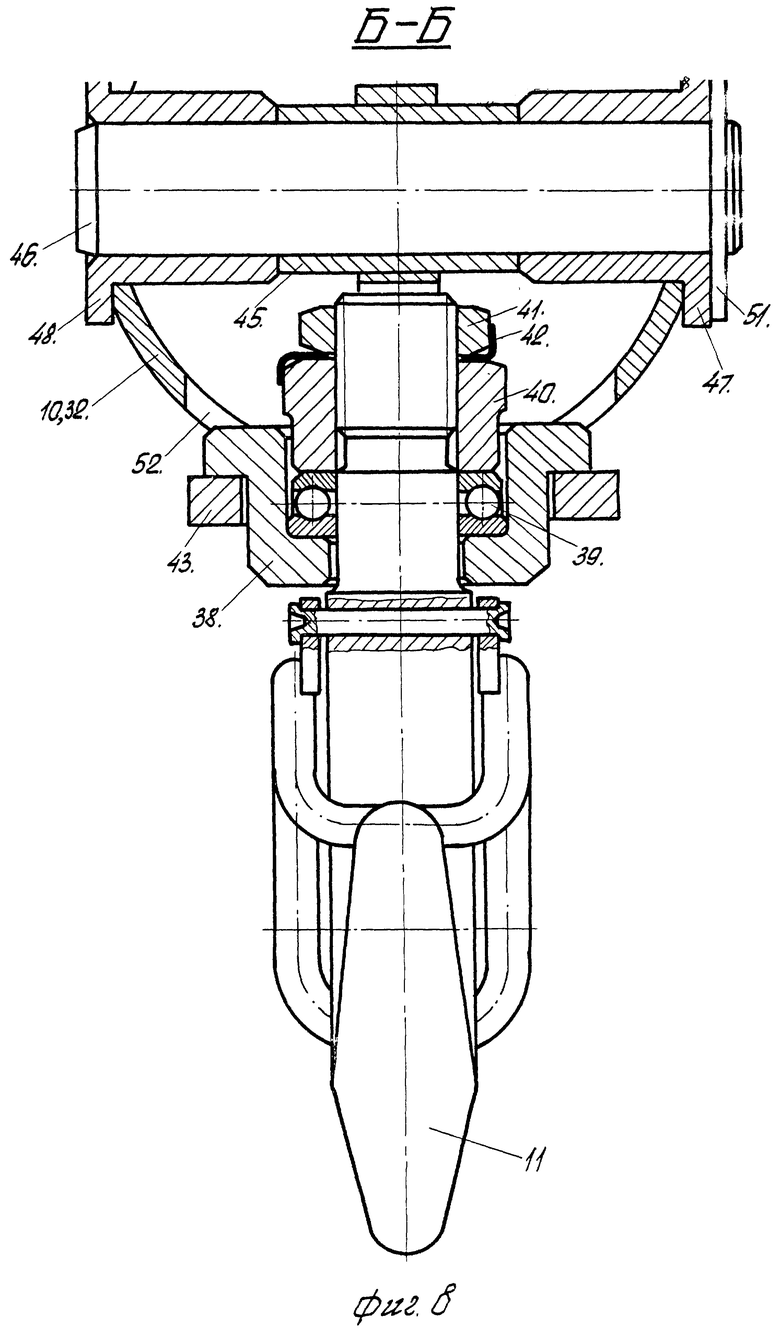
На фиг. 8 - сечение Б-Б на фиг. 4, узел шарнирного соединения крюкового захвата с концевой частью рукояти.
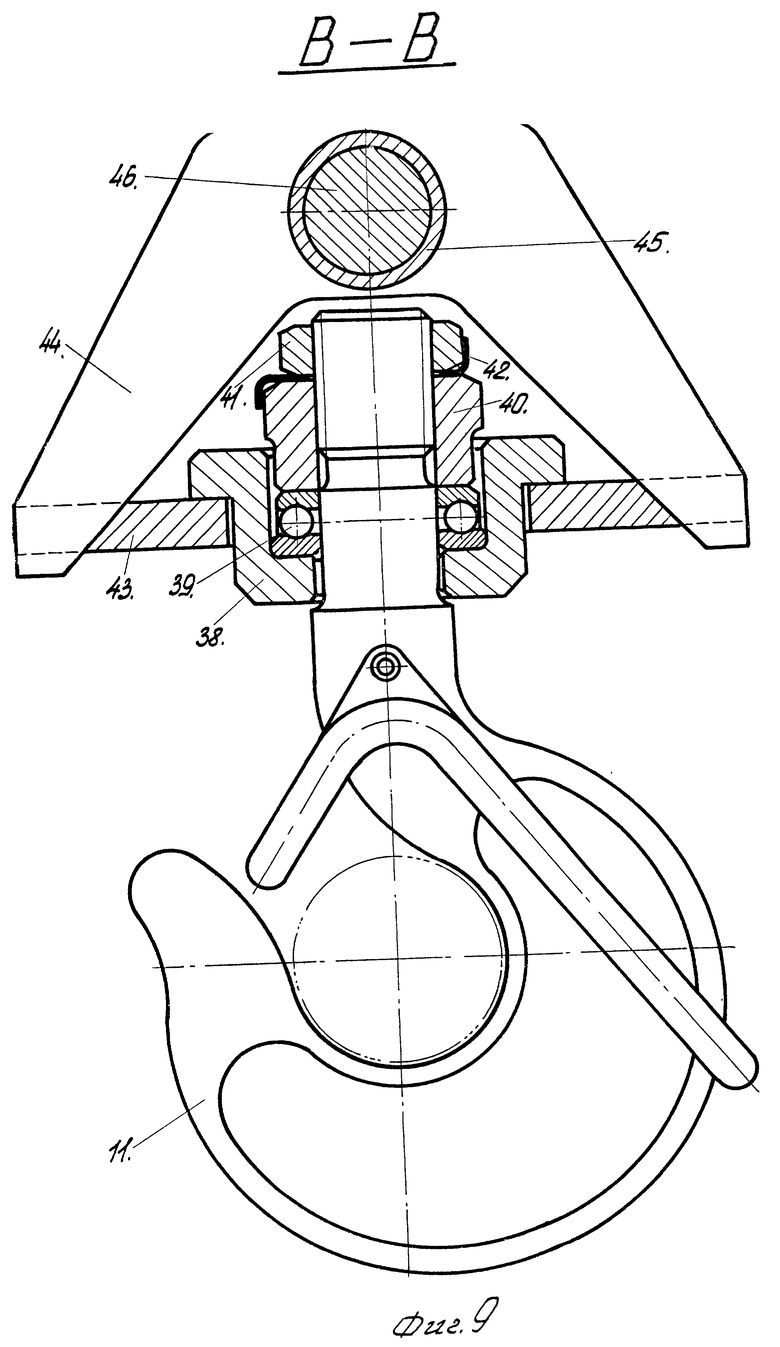
На фиг. 9 - сечение В-В на фиг. 5, размещение крюкового захвата в опорном стакане узла шарнирного соединения в концевой части рукояти.
Сведения, подтверждающие возможность реализации заявленного изобретения, заключаются в следующем.
Манипулятор содержит основание 1 с кронштейнами навески 2, 3 и 4 и выдвижными левой и правой опорами 5 и 6, закрепленную с возможностью поворота вокруг вертикальной оси 7 основания 1 опорно-поворотную колонку 8 со смонтированной на ней стрелой 9, рукоять 10 с грузозахватным крюком 11, гидроприводы 12 и 13 управления, соответственно, стрелы 9 и рукояти 10, и гидропривод управления, включающий в себя гидроцилиндры 14 и 15 и кинематически связанный с механизмом 16 поворота опорно-поворотной колонки 8 (см. фиг. 1-3).
Основание 1 выполнено плоским из полого металлопроката соответствующего профиля и сечения. Основание 1 содержит стойку 17, балку 18 и раскосы 19 и 20. Стойка 17, балка 18 и раскосы 19 и 20 взаимно соединены сварными швами, места сопряжений усилены косынками и образуют единый неразъемный узел. На вершине стойки 17 основания 1 размещен кронштейн навески 4. Балка 18 несет на себе кронштейны навески 2 и 3. Кронштейны 2-4 образуют присоединительный треугольник для соединения с тягами гидронавески агрегатируемого трактора. В полости балки 18 размещены выдвижные левая и правая опоры 5 и 6. Рабочее и нерабочее положения опор 5 и 6 в полости балки 18 основания 1 зафиксировано пальцами. Стойка 17 основания 1 снабжена вертикально разнесенными, соосно и попарно установленными на вертикальной оси 7 кронштейнами 21 и 22.
Опорно-поворотная колонка 8 выполнена из толстостенной полой балки квадратного или круглого сечения. Колонка 8 имеет кронштейны 23, 24, 25 и дополнительный рычаг. Пары кронштейнов 21, 22 и 23, 24 взаимно соединены осями поворота 26 и 27. Положение осей поворота 26 и 27 совмещено с вертикальной осью поворота 7 опорно-поворотной колонки 8 для поворота вокруг основания 1.
Стрела 9 соединена шарнирно с верхней частью опорно-поворотной колонки 8. Стрела 9 снабжена кронштейном 28. Кронштейн 28 стрелы 9 осями связан с основаниями силовых гидроцилиндров 12 и 13 управления стрелой и рукоятью 10. Шток силового гидроцилиндра 12 шарнирно соединен с кронштейном 25 опорно-поворотной колонки 8. Стрела 9 с рукоятью 10 соединена осью 29. Шток силового цилиндра 13 шарнирно соединен с плечом 30 рукояти 10.
Рукоять 10 выполнена составной. Рукоять 10 снабжена подвижными средней и внутренней частями 31 и 32. Положения средней части 31 и внутренней части 32 относительно друг друга и рукояти 10 выполнены фиксируемыми. Манипулятор снабжен съемными пальцами 33 и 34 для фиксации положения подвижных частей 31 и 32 рукояти 10. Положение каждой подвижной части 31 (32) рукояти 10 зафиксировано идентичным по конструкции пальцем 33 (34). Рукоять 10, средняя подвижная часть 31 и внутренняя подвижная часть 32 выполнены полыми и взаимно сопрягаемыми между собой своими соответствующими внешними и внутренними поверхностями. Свободные концы подвижных средней и внутренней частей 31 и 32 рукояти 10 снабжены парами оппозитно установленных ручек 35 и 36. Подвижные средняя часть 31 и внутренняя часть 32 рукояти 10 снабжены попарно установленными упорами 37 предельных положений (см. фиг. 4-7).
Грузозахватный крюк 11 смонтирован на свободном конце подвижной внутренней части 32. Грузозахватный крюк 11 (см. фиг. 1-9) в опорном стакане 38 (см. фиг. 8 и 9) установлен посредством упорного шарикоподшипника 39 и зафиксирован в стакане 38 гайкой 40 и контргайкой 41 через фасонную шайбу 42. Опорный стакан 36 закреплен на планке 43 подвеса 44. Подвес 44 имеет  образную форму и своими нижними полками размещен в пазах планки 43. Подвес 44 с планкой 43 соединен сварными швами. Подвес 44 снабжен опорной втулкой 45.
образную форму и своими нижними полками размещен в пазах планки 43. Подвес 44 с планкой 43 соединен сварными швами. Подвес 44 снабжен опорной втулкой 45.
Подвес 44 грузозахватного крюка 11 размещен в полости подвижной внутренней части 32 рукояти 10. Опорная втулка 45 размещена на оси 46, установленной во втулках 47 и 48. Втулки 47 и 48 на конце внутренней части 32 установлены соосно. Положение оси 46 на конце подвижной части 32 рукояти 10 зафиксировано стопорным болтом 49, ввернутым в резьбовую бонку 50 через отверстие планки 51 оси 46. Планке 51 придана соответствующая форма и с осью 46 она соединена замкнутым кольцевым швом электросварки. Продольный паз 52 на нижней части внутренней подвижной части 32 рукояти 10 обеспечивает рабочее состояние грузозахватного крюка 11 при любых положениях стрелы 9 и рукояти 10. Описанная конструкция рукояти 10 обеспечивает выполнение широкого спектра погрузочных работ, а также существенно увеличивает зону обслуживания в части удаления от агрегатируемого трактора, так и по высоте погрузки сельскохозяйственных грузов.
Гидропривод управления опорно-поворотной колонкой 8 размещен на вершине плоского основания 1 и кинематически связан механизмом 16 поворота колонки. Механизм 16 поворота колонки 8 содержит двуплечий рычаг 53. Ось поворота рычага 53 совмещена с вертикальной осью 7 поворота этой колонки 8, в частности совмещена с осью 27 (см. фиг. 1-3). Силовые гидроцилиндры 14 и 15 упомянутого гидропривода опорно-поворотной колонки 8 расположены разнонаправленно и соединены своими штоками 54 и 55 с дополнительными рычагами 56 и 57. Рычаг 57 закреплен на плоском основании 1. Другой рычаг 56 установлен на поворотной колонке 8. Положение рычагов 57 и 56 на основании 1 и колонке 8 выбрано таким, чтобы обеспечить поворот стрелы 9 и рукояти 10 с грузозахватным крюком 11 в горизонтальной плоскости на угол не менее ± 90o от продольно-вертикальной плоскости симметрии погрузочного агрегата.
Манипулятор работает следующим образом.
Агрегатируемый трактор, в частности гусеничный тягач класса тяги 3 при грузоподъемности манипулятора 1,5 т, тягами навесной системы соединяют посредством пальцев 58, 59 и 60 (см. фиг. 1) соответственно с кронштейнами навески 2, 3 и 4. Из центральной верхней тяги навески трактора удаляют упругий элемент. Тяги трактора соединяют с плоским основанием 1 манипулятора по "трехточечной" схеме навески. Гидронавеской трактора основание 1 переводят в транспортное положение. Левую и правую опоры 5 и 6 переводят в рабочее положение. Основание 1 навеской трактора устанавливают в рабочее положение. Проверяют по отвесу положение стойки 17. Изменением длины верхней тяги (за счет резьбовой пары) устанавливают требуемое положение плоского основания 1. Раздельно-агрегатную гидравлическую систему трактора рукавами высокого давления соединяют с трубопроводами гидроприводов управления стрелой 9, рукоятью 10 и механизма 16 поворота опорной колонки 8.
Рассмотрим технологические процессы погрузки кип из прессованных корней солодки в крупно- и среднетоннажные контейнеры и погрузки-разгрузки стоечных поддонов с корневой массой лакрицы при сборе после добычи и доставки ее на пункт первичной подработки.
При уборке корневой массы лакрицы корни и корневища солодки голой (Glycyrrhiza glabrah.) вручную укладывают в стоечные поддоны. Поддоны размещают на убранных полосах. Погрузочный агрегат, включающий трактор и заявленный манипулятор, дополняют прицепной тракторной тележкой ПТС-6,0 или ПСЕ-12.5Ф. При остановке агрегата тракторист управляет описанным манипулятором не выходя из кабины трактора. Управляя левой и правой ручками гидрозолотника гидросистемы трактора, тракторист соответственно манипулирует силовыми гидроцилиндрами 12 и 13 стрелы 9 и рукояти 10. Средней ручкой гидрозолотника управляют гидроцилиндрами 14 и 15 механизма 16 поворота опорно-поворотной колонки 8.
При заполненных контейнерах в зев грузозахватного крюка вводят стропы контейнера, управляя левой и правой ручками секций гидрозолотников. Контейнер приподнимается на заданную высоту и далее перемещается в требуемом направлении в радиальной плоскости опорно-поворотной колонки 8. Затем механизатор приводит в действие среднюю ручку гидрозолотника управления гидросистемой трактора. При подаче масла под давлением через гидравлически соединенные рукава масло подается в бесштоковую полость гидроцилиндра 14 и параллельно в штоковую полость гидроцилиндра 15. При заполнении упомянутых полостей шток 54 выдвигается из гильзы цилиндра 14, а шток 55 втягивается в полость гильзы цилиндра 15. Это приводит к тому, что левое плечо двуплечего рычага 53 механизма 16 поворота колонки приближается к дополнительному рычагу 57 основания 1, поворачиваясь вокруг вертикальной оси 27. В то же время поворот опорно-поворотной колонки 8 вокруг осей 27 и 26 ускоряется благодаря тому, что шток 54 гидроцилиндра 14 выдвигается из гильзы и перемещает дополнительный рычаг 56, поворачивая опорно-поворотную колонку 8, а вместе с ней стрелу 9 и рукоять 10. Манипулируя положением штоков силовых гидроцилиндров 12 и 13, оператор опускает заполненный стоечный контейнер на поверхность платформы тракторной тележки. Разгрузку контейнеров с корневой массой солодки после доставки на пункт первичной подработки проводят в обратном порядке.
Рассмотрим технологический процесс погрузки кип из спрессованных корней солодки в крупно- и среднетоннажные контейнеры. По требованию ГОСТ 22839-79 масса прессованной кипы должна быть в пределах 200 кг с отклонением по массе в пределах ± 10%. Кипа должна быть надлежащим образом перевязана металлическими или латунными полосами шириной 20 мм и толщиной не менее 0,7 мм. При загрузке крупнотоннажных контейнеров подвижную внутреннюю часть 32 и среднюю подвижную часть 31 выдвигают из полости рукояти таким образом, как представлено на фиг. 7. Для этого механизатор сначала палец 33 удаляет из крайнего отверстия. Усилием пары рук механизатора, приложенных к ручкам 35, подвижную часть 32 выдвигают из полости средней подвижной части 31 рукояти 10. При крайнем положении внутренней подвижной части 32 палец 33 устанавливают в положение, изображенное на фиг. 7. За пару оппозитно установленных ручек 36 среднюю подвижную секцию 31 выдвигают из полости рукояти 10. Крайнее выдвинутое положение средней части 31 в полости рукояти 10 фиксируют пальцем 34. Рабочее положение пальца 34 показано на фиг. 7. Погрузку кип из корней солодки массой 200 кг в крупнотоннажные контейнеры производят так же, как и стоечных контейнеров на платформу тракторной тележки.
При загрузке лакричного сырья в среднетоннажные контейнеры палец 33 извлекают из соосных отверстий частей 32 и 31 рукояти 10. За пару ручек 35 внутреннюю часть 32 утапливают (задвигают) в полость средней части 31 рукояти 10. При загрузке малотоннажных контейнеров из средней части 31 выдвигают лишь внутреннюю подвижную часть 32 так, как показано на фиг. 6.
Все операции по управлению положением грузозахватного крюка 11 производятся вышеописанными действиями механизатора.
Описанные конструкции рукояти и механизма поворота опорно-поворотной колонки обеспечивают высокую степень надежности, упрощают конструкцию манипулятора и расширяют зону его работы как в горизонтальной плоскости, так и по высоте подъема и удаленности от плоского основания. В транспортном положении заявленный манипулятор имеет минимальные размеры.
Таким образом, изложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
средство, воплощающее заявленное изобретение при его осуществлении, предназначено для использования в сельскохозяйственном машиностроении;
для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте нижеприведенной формулы изобретения, подтверждена возможность его осуществления с помощью вышеописанных в заявке или известных до даты приоритета средств и методов;
средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить достижение усматриваемого заявителем технического результата.
Следовательно, заявленное изобретение соответствует требованию "промышленная применимость" по действующему законодательству.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158709C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166473C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305636C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305638C1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2305639C1 |

Изобретение относится к грузоподъемным машинам и может быть использовано в сельскохозяйственном машиностроении. Манипулятор содержит основание с кронштейнами навески и выдвижными опорами, закрепленную с возможностью поворота вокруг вертикальной оси опорно-поворотную колонку со смонтированной на ней стрелой, рукоять с грузозахватным крюком, гидроприводы управления стрелой и рукоятью и гидропривод управления, включающий в себя гидроцилиндры и кинематически связанный с механизмом поворота опорно-поворотной колонки. Рукоять снабжена подвижными средней и внутренней частями, фиксируемыми относительно друг друга и рукояти, грузозахватный крюк смонтирован на свободном конце подвижной внутренней части, гидропривод управления опорно-поворотной колонкой размещен на вершине плоского основания, а механизм поворота содержит двуплечий рычаг, ось поворота которого совмещена с вертикальной осью поворота этой колонки. Гидроцилиндры упомянутого гидропривода расположены разнонаправленно и соединены своими штоками с дополнительными рычагами, один из которых закреплен на плоском основании, а другой - на поворотной колонке. Изобретение обеспечивает расширение зоны обслуживания манипулятора. 4 з.п. ф-лы, 9 ил.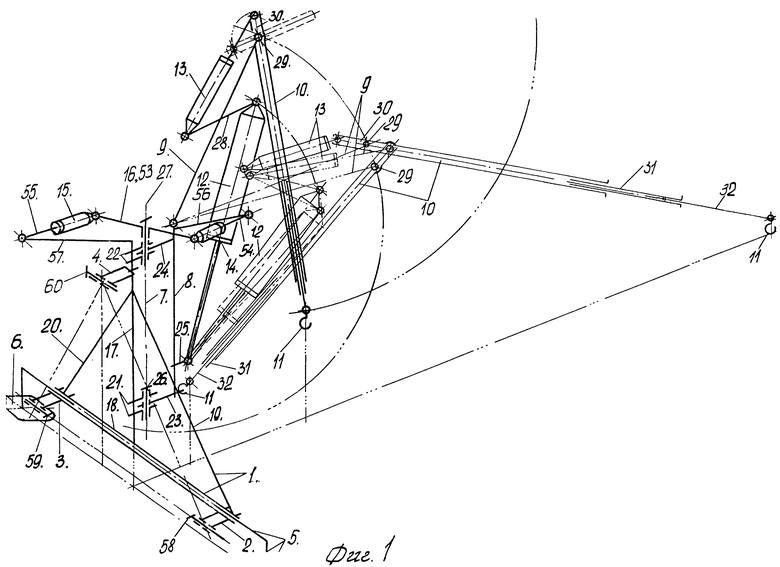
| Канальная печь-сушильня | 1920 |
|
SU230A1 |
| Электрическое сопротивление для нагревательных приборов и нагревательный элемент для этих приборов | 1922 |
|
SU1997A1 |
| Способ контроля геометрии многолезвийного режущего инструмента | 1984 |
|
SU1229557A1 |
| US 3533515 A, 13.10.1970 | |||
| Механизм поворота колонны стрелового крана | 1987 |
|
SU1463708A1 |
