Изобретение относится к грузоподъемному оборудованию и может быть использовано, например, для валки, пакетирования и трелевки в лесной промышленности и лесном хозяйстве.
Известен манипулятор, включающий опорно-поворотное устройство, установленную на нем стрелу с ее приводом, на свободном конце стрелы шарнирно установлена рукоять и ее привод, установленный над стрелой (Кусакин Н.Ф. Устройство и эксплуатация трелевочных тракторов: Учеб. пособие для профтехучилищ. - М.: Лесн. пром-сть, 1985. - 272 с., см. стр.136, рис.79).
Известный манипулятор имеет повышенную массу и габариты из-за части рукояти, расположенной выше шарнира крепления ее к стреле и служащей плечом привода рукояти.
Наиболее близким решением из известных является манипулятор, включающий опорно-поворотное устройство, шарнирно установленную на нем стрелу с ее приводом, на свободном конце стрелы шарнирно установлена рукоять, привод которой установлен под стрелой (Кусакин Н.Ф. Устройство и эксплуатация трелевочных тракторов: Учеб. Пособие для профтехучилищ. - М.: Лесн. пром-сть, 1985. - 272 с., см. стр.151, рис.88).
Данный манипулятор обладает тем недостатком, что рукоять подвергается скручивающим усилиям по всей длине и изгибающим усилиям на длине ниже крепления к ней ее привода.
Технический результат заключается в повышении надежности и увеличении долговечности.
Технический результат достигается тем, что манипулятор включает опорно-поворотное устройство, установленную шарнирно на нем стрелу с ее приводом, на свободном конце стрелы шарнирно установлена рукоять, привод которой размещен под стрелой, и привод рукояти одним концом, например корпусом, шарнирно соединен с шарниром соединения стрелы с опорно-поворотным устройством, а другим концом, например, штоком, шарнирно соединен со свободным концом рукояти.
В предлагаемом манипуляторе исключается влияние изгибающих моментов на конструкцию рукояти, т.к. при виде сбоку стрела, рукоять и привод рукояти образуют шарнирный трехзвенник, а исключение изгибающих моментов повышает надежность и увеличивает долговечность конструкции.
В патентной и научно-технической литературе подобной конструкции манипулятора нами не обнаружено.
На чертеже изображена схема манипулятора, вид сбоку.
Манипулятор включает опорно-поворотное устройство 1 с колонной 2, на которой шарнирно установлена стрела 3 с ее приводом 4, выполненным в виде гидроцилиндра. На свободном конце стрелы 3 шарнирно установлена рукоять 5, к концу которой прикреплено грузозахватное устройство 6 с гидроприводами 7. Привод 8 рукояти 5 выполнен в виде телескопического многозвенного гидроцилиндра, одним концом, например корпусом, шарнирно прикреплен к оси 9 крепления стрелы 3 к колонне 2, а другим, например штоком - к оси 10 крепления грузозахватного устройства 6 к рукояти 5. В случае установки манипулятора на трелевочную машину для подтягивания грузозахватного устройства 6 устанавливают дополнительный трособлочный привод рукояти 5, включающий, например, лебедку 11, закрепленную на поворотной колонне 2, направляющий блок 12, установленный на оси 9, и трос 13, свободный конец которого пропущен через блок 12 и соединен с рукоятью 5 на конце крепления грузозахватного устройства 6.
Манипулятор работает следующим образом.
Для увеличения вылета манипулятора рукоять 5 отталкивается приводом 8, при этом штоки секций выдвигаются. После захвата груза устройством 6 стрела 3 поднимается посредством ее гидропривода 4, привод 8 ставится в «плавающее» положение и рукоять 5 под действием весов груза, захватного устройства 6 и собственного веса рукояти 5 поворачивается в сторону стрелы 3 до нужного вылета манипулятора, далее привод 8 ставят в запертое положение и груз переносится в нужное место поворотом манипулятора в горизонтальной плоскости и гидроприводом 4 стрелы 3. При установке манипулятора на трелевочной машине увеличение вылета манипулятора осуществляется вышеописанным способом. После захвата груза устройством 6 стрела 3 поднимается гидроприводом 4, привод 8 становится в «плавающее» положение и рукоять 5 подтягивается к опорно-поворотному устройству 1 приводом 11 посредством троса 13 до нужного вылета. Далее укладка груза осуществляется вышеописанным способом.
Предлагаемая конструкция манипулятора позволяет устранить изгибающие моменты на конструкцию рукояти, а это повышает надежность и увеличивает долговечность.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2251479C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158709C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166473C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2166472C1 |
| СПОСОБ И МАШИНА ДЛЯ ТРЕЛЕВКИ | 2002 |
|
RU2224417C2 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168456C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167100C1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА ЛЕСОЗАГОТОВИТЕЛЬНОЙ МАШИНЫ | 2000 |
|
RU2167515C1 |
Изобретение относится к грузоподъемному оборудованию и может быть использовано в лесной промышленности и лесном хозяйстве. Манипулятор включает опорно-поворотное устройство, стрелу с приводом и рукоять. Привод рукояти выполнен в виде телескопического многозвенного цилиндра, один конец которого шарнирно прикреплен к оси крепления стрелы к опорно-поворотному устройству, а другой конец шарнирно прикреплен к оси крепления грузозахватного устройства к рукояти. Привод рукояти дополнительно снабжен трособлочным приводом. Достигается повышение надежности и увеличение долговечности. 1 з.п. ф-лы, 1 ил.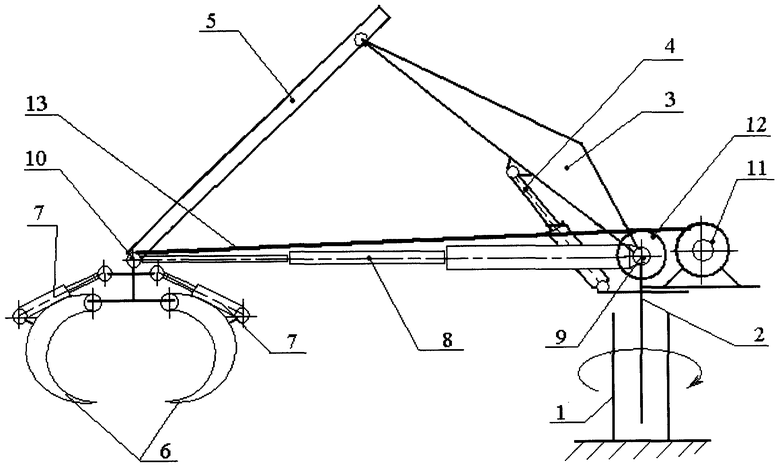
1. Манипулятор, включающий опорно-поворотное устройство, шарнирно установленную на нем стрелу с ее приводом, на свободном конце стрелы шарнирно установлена рукоять, привод которой установлен под стрелой, отличающийся тем, что привод рукояти, например телескопический многозвенный гидроцилиндр, одним концом, например корпусом, шарнирно прикреплен к оси крепления стрелы к опорно-поворотному устройству, а другим концом, например штоком, прикреплен шарнирно к оси крепления грузозахватного устройства к рукояти.
2. Манипулятор по п.1, отличающийся тем, что привод рукояти снабжен дополнительным трособлочным приводом, включающим, например, лебедку, установленную на опорно-поворотном устройстве, свободный конец троса которой пропущен через блок, установленный на оси соединения стрелы с опорно-поворотным устройством, и закреплен на конце рукояти у грузозахватного устройства.
| Манипулятор | 1989 |
|
SU1768497A1 |
| МАНИПУЛЯТОР | 2006 |
|
RU2312056C1 |
| СПОСОБ ОРГАНИЗАЦИИ ПАРАЛЛЕЛЬНО-КОНВЕЙЕРНЫХ ВЫЧИСЛЕНИЙ В ОДНОРОДНОЙ ВЫЧИСЛИТЕЛЬНОЙ СРЕДЕ С КОММУТАЦИОННО-ПОТОКОВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2558613C2 |
| Гидравлический кран-манипулятор | 1970 |
|
SU544606A1 |

