Изобретение относится к области радиотехники и может быть использовано в радиолокационных станциях (РЛС) с активными фазированными антенными решетками (АФАР) при цифровом формировании диаграммы направленности (ДН), применении в качестве зондирующих широкополосных линейно-частотно-модулированных (ЛЧМ) сигналов и электронном сканировании ДН в широком угловом секторе.
Для повышения информационных характеристик РЛС возникает необходимость применения широкополосных зондирующих сигналов для обеспечения высокой разрешающей способности по дальности, что необходимо для распознавания типов одиночных целей и оценки численного состава групповой цели, а также широкоугольного электронного сканирования ДН, что необходимо для увеличения потока информации, извлекаемой РЛС из окружающего пространства. При этом решение одной задачи противоречит другой, так как происходит искажение фазового распределения поля на апертуре антенны, что приводит к искажению ДН.
В связи с этим разработка способов формирования ДН АФАР при широкополосном зондировании пространства и широкоугольном электронном сканировании ДН представляет собой актуальную задачу.
Известны приемно-передающие модули (ППМ) активных фазированных антенных решеток (АФАР), предназначенные для формирования и электронного управления ДН, представленные в источниках патентной информации [1-6], недостатки которых состоят в том, что они пригодны для формирования ДН только относительно узкополосных АФАР. Данный недостаток обусловлен тем, что в каждом из этих ППМ осуществляется преобразование несущего колебания на промежуточную частоту, а ширина спектра зондирующего сигнала не может превышать 10% от частоты несущего колебания, в данном случае - промежуточной частоты.
Известны также ППМ [7, 8], которые характеризуются большими погрешностями формирования требуемого амплитудно-фазового распределения поля на апертуре АФАР, что объясняется применением аналоговых фазовращателей и аттенюаторов для решения этой задачи. А это в свою очередь приводит к искажениям пеленгационной характеристики и, как следствие - к значительным погрешностям измерения угловых координат целей. Анализ других источников патентной информации показал, что значительная часть известных технических предложений по разработке ППМ обладают теми же недостатками, что и приведенные выше.
Среди технических предложений, направленных на обеспечение работы АФАР при излучении и приеме широкополосных зондирующих ЛЧМ-сигналов и широкоугольном электронном санировании ДН, заслуживает внимания работа [9]. Проведенный авторами данной работы анализ показал, что в режиме излучения на линейный набег фазы накладывается дополнительный набег фазы, приводящий к искажениям амплитудно-фазового распределения поля на апертуре. Для коррекции искажений предложено и при излучении, и при приеме сигналов умножать дополнительный набег фазы на комплексно сопряженный с ним поправочный коэффициент, который должен формироваться синхронно с излучаемым и принимаемым сигналами. Однако момент поступления принимаемого сигнала заранее неизвестен, поэтому недостаток ППМ по техническому предложению [9] состоит в невозможности коррекции искажений амплитудно-фазового распределения поля на апертуре АФАР в режиме приема.
Указанный недостаток частично устранен в предложении [10], сущность которого иллюстрируется фигурами 1 и 2.
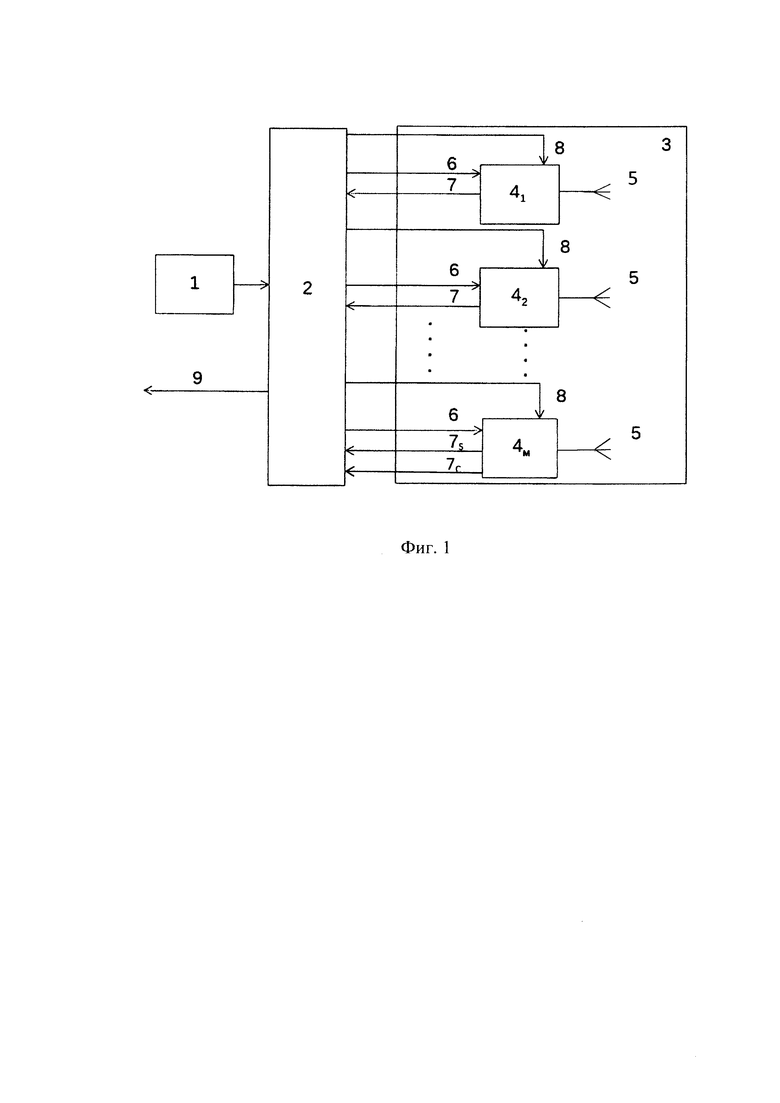
На фигуре 1 приведена структурная схема устройства формирования ДН АФАР, в состав которой входят цифровой синтезатор 1 ЛЧМ-сигнала, процессор 2 формирования ДН, блок 3 приемно-передающих модулей, в состав которого входят М цифровых ППМ 4 с излучателями 5. Входы 6 и выходы 7 каждого m-го ППМ 4 (где  ) подключены к соответствующим выходам и входам процессора 2. Входы 8 каждого m-го ППМ 4 подключены к выходам входящих в состав процессора 2 датчикам направления фазирования АФАР θϕ в режимах излучения и приема.
) подключены к соответствующим выходам и входам процессора 2. Входы 8 каждого m-го ППМ 4 подключены к выходам входящих в состав процессора 2 датчикам направления фазирования АФАР θϕ в режимах излучения и приема.
Работает представленное на фиг. 1 устройство формирования ДН следующим образом. В режиме излучения АФАР синтезатор 1 ЛЧМ-сигнала формирует комплексные отсчеты u(s) ЛЧМ-сигнала, следующие с периодом ΔТ, заданными параметрами девиации частоты Δƒ и длительности зондирующего импульса τu в соответствии с выражением

которые поступают на вход процессора 2 формирования ДН.
В процессоре 2 для заданных значений направления фазирования θϕ и номеров отсчетов s осуществляется умножение входного сигнала u(s) (1) на комплексные коэффициенты вида

компенсирующие набег фазы ЛЧМ-сигнала в зависимости от номера m ППМ 4 и выбранного направления фазирования θϕ, а также дополнительно на комплексные коэффициенты вида 

компенсирующие искажения фазового распределения поля на апертуре АФАР вследствие девиации частоты ЛЧМ-сигнала в режиме передачи в соответствии с номером га ППМ 4 по патенту [9].
При этом формируются М сигналов um(s, θϕ), соответствующих числу М цифровых ППМ 4, вида

Сигналы (4) с выходов процессора формирования ДН 2 поступают на входы соответствующих m-х ППМ 4.
В режиме приема принятые излучателями каждого m-го ППМ 4 сигналы усиливаются, преобразуются и квадратурные составляющие сигналов um с выхода 7 каждого m-го ППМ 4 поступают на соответствующие входы процессора 2, где путем суммирования этих сигналов формируется ДН, а суммарный сигнал 9 с выхода АФАР поступает в систему первичной обработки радиолокационной информации.
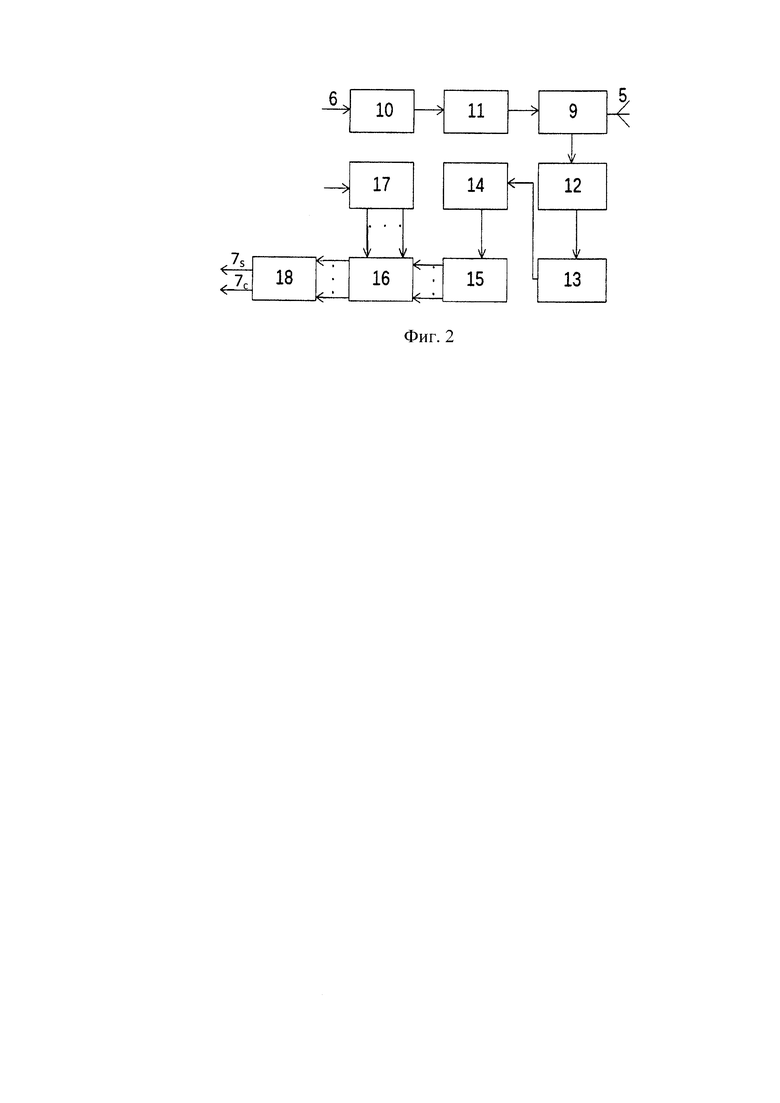
В состав структурной схемы ППМ 4, представленной на фигуре 2, входят два канала - передающий и приемный, а также общие для обоих каналов антенный переключатель 9 и излучатель 5.
В состав передающего канала (фиг. 2) входят цифро-аналоговый преобразователь (ЦАП) 10 и усилитель мощности 11. Передающий канал выполняет следующие операции. Цифро-аналоговый преобразователь 10 преобразует поступающие на его вход цифровые ЛЧМ-сигналы (4) в аналоговые ЛЧМ-сигналы несущей частоты. Сигналы с выхода ЦАП 10 усиливаются усилителем мощности 11, через антенный переключатель 9 подаются на излучатель 5 и излучаются в пространство. В результате суперпозиции излучаемых каждым m-м излучателем электромагнитных волн формируется ДН АФАР в режиме передачи в соответствии с соотношением:

В состав приемного канала цифрового ППМ 4 (фиг. 2) входят устройство защиты 12, малошумящий усилитель (МШУ) 13, аналого-цифровой преобразователь (АЦП) 14, блок 15 цифровых полосовых фильтров, блок 16 комплексных умножителей, блок 17 формирования весовых комплексных коэффициентов и блок 18 цифровых комплексных сумматоров. Квадратурные выходы 7 (7s и 7с) блока 18 сумматоров являются квадратурными выходами цифрового ППМ 4.
Цифровое формирование ДН АФАР в режиме приема осуществляются следующим образом. Принятый излучателем 5 отраженный от цели сигнал усиливается МШУ 13, преобразуется в цифровую форму АЦП 14, то есть как и в передающем канале - без преобразования на промежуточную частоту. Оцифрованный сигнал поступает на вход блока 15 цифровых полосовых фильтров, осуществляющих деление широкого спектра принимаемого сигнала на узкополосные участки спектра. В состав блока 15 входят I цифровых фильтров, ширина полосы пропускания каждого из которых  удовлетворяет критерию узкополосности [11]
удовлетворяет критерию узкополосности [11]

где с - скорость света; La -линейны размер апертуры антенны в соответствующей плоскости.
В качестве делителей широкополосного спектра на узкополосные участки применены цифровые полосовые КИХ-фильтры, обеспечивающие высокую точность формирования пеленгационной характеристики АФАР и возможность их реализации в виде специализированных программируемых логических интегральных схем [12-14]. Проведенный в работе [14] анализ показал, что современная элементная база позволяет производить цифровую обработку сигналов в реальном масштабе времени на частотах до 1,5 ГГц, а в ближайшие годы до 20 ГГц.
С выходов блока 15 узкополосные сигналы поступают на первые входы блока 16 комплексных умножителей, на вторые входы которого от блока 17 поступают весовые комплексные коэффициенты Wi по числу I узкополосных сигналов. При падении волны на апертуру АФАР с направления θпад по отношению к нормали к апертуре каждый i-й сигнал на входе каждого m-го ППМ 4 получает фазовый сдвиг

где ωi=2πƒi - центральная частота i-го узкополосного спектра.
Для компенсации этой фазы комплексная огибающая каждого i-го сигнала  в блоке 16 умножается на комплексно сопряженный с ним коэффициент
в блоке 16 умножается на комплексно сопряженный с ним коэффициент

Сигналы с выхода блока 16 поступают на вход блока 18 цифровых сумматоров. В результате суммирования на выходе 7 блока 18, являющегося выходом m-го цифрового ППМ 4, формируется комплексная огибающая сигнала

Напряжение (9) с выхода 7 каждого т-го цифрового ППМ поступает на соответствующий вход процессора 2, где в результате их суммирования формируется сигнал с выхода АФАР

Это напряжение с выхода 9 процессора 2 поступает в систему первичной обработки радиолокационной информации РЛС, где используется для обнаружения сигнала и измерения координат объекта наблюдения (цели).
Напряжение (10) принимает максимальное значение при условии θϕ=θпад, т.е. при фазировании антенны в направлении на цель:

Деление выражения (10) на выражение (11) дает соотношение (12), определяющее нормированную ДН АФАР в режиме приема

Необходимо отметить, что особенность формирования ДН АФАР на прием по прототипу состоит в том, что это формирование осуществляется для каждого i-го узкополосного сигнала отдельно с последующим объединением полученных результатов. Таким образом ДН на прием формируется как для случая узкополосного сигнала, что исключает искажения фазового распределения поля на апертуре АФАР при приеме широкополосных ЛЧМ-сигналов, вызванные девиацией частоты сигнала, т.е. прототип обеспечивает цифровое формирование ДН АФАР как на передачу, так и на прием, когда момент поступления на вход приемного устройства отраженного от цели сигнала неизвестен. В этом состоит его достоинство.
Вместе с тем, принятый в качестве прототипа цифровой ППМ АФАР по патенту [10] имеет существенный недостаток, состоящий в том, что не только структуры его каналов, формирующие ДН АФАР в режимах излучения и приема отличаются одна от другой, но и алгоритмы формирования ДН в упомянутых режимах совершенно разные. В таком случае весьма высока вероятность несовпадения ее диаграмм направленности не только по форме, но и по положению их главных лепестков, т.е. к расфазированию приемно-передающей антенны РЛС, что приведет к снижению отношения сигнал-шум, вероятности обнаружения цели и к росту ошибок измерения ее координат.
В соответствии с изложенным, целью изобретения является разработка цифрового ППМ АФАР, обеспечивающего согласованное формирование ее ДН в режимах излучения и приема широкополосных ЛЧМ-сигналов при широкоугольном электронном обзоре пространства, исключающее расфазирование АФАР в режимах излучения и приема.
Указанная цель достигается тем, что в состав цифрового ППМ устройства формирования диаграммы направленности АФАР импульсной РЛС, включающего передающий и приемный каналы, а также общие для обоих каналов антенный переключатель с излучателем, блок цифровых полосовых фильтров и блок формирования цифровых весовых коэффициентов, вход которого подключен к выходу входящего в состав процессора формирования диаграммы направленности АФАР датчика направления максимума излучения АФАР, причем в состав передающего канала входят последовательно включенные цифро-аналоговый преобразователь и усилитель мощности, выход которого подключен к входу антенного переключателя, а в состав приемного канала входят последовательно включенные устройство защиты, малошумящий усилитель (МШУ) и аналого-цифровой преобразователь (АЦП), кроме того, в состав приемного канала цифрового ППМ входят первый блок цифровых комплексных умножителей и первый блок цифровых комплексных сумматоров, вход которого подключен к выходу первого блока цифровых комплексных умножителей, а его квадратурные выходы являются выходами приемного канала соответствующего цифрового ППМ и соединены с соответствующими входами процессора формирования диаграммы направленности АФАР. Согласно предлагаемому техническому решению входящий в состав цифрового ППМ блок формирования цифровых весовых коэффициентов, вход которого подключен к выходу входящего в состав процессора формирования диаграммы направленности датчика направления фазирования АФАР в режимах излучения и приема, дополнительно снабжен второй группой выходов, при этом в состав передающего канала цифрового ППМ дополнительно введены второй блок цифровых комплексных умножителей и второй блок цифровых комплексных сумматоров, вход которого подключен к выходу второго блока цифровых комплексных умножителей, а выход подключен к входу цифро-аналогового преобразователя (ЦАП), кроме того, в состав цифрового ППМ дополнительно введены первый коммутатор на два положения, выход которого соединен с входом входящего в состав цифрового ППМ блока цифровых полосовых фильтров, его первый вход через процессор формирования диаграммы направленности соединен с выходом цифрового синтезатора линейно-частотно-модулированного сигнала, а второй вход подключен к выходу АЦП приемного канала, и второй коммутатор на два положения, входы которого связаны с выходами блока цифровых полосовых фильтров, а первая группа выходов второго коммутатора подключена к первым входам первого блока цифровых комплексных умножителей, второй вход которого подключен к первой группе выходов блока формирования цифровых весовых коэффициентов, при этом вторая группа выходов второго коммутатора подключена к первым входам второго блока цифровых комплексных умножителей, второй вход которого подключен ко второй группе выходов блока формирования цифровых весовых коэффициентов.
Таким образом, отличия предлагаемого цифрового приемно-передающего модуля АФАР от прототипа состоят в следующем:
входящий в состав ППМ блок формирования цифровых весовых коэффициентов, вход которого подключен к выходу входящего в состав процессора формирования диаграммы направленности датчика направления фазирования АФАР в режиме излучения и приема, дополнительно снабжен второй группой выходов;
в состав передающего канала цифрового ППМ дополнительно введены второй блок цифровых комплексных умножителей и второй блок цифровых комплексных сумматоров, вход которого подключен к выходу второго блока цифровых комплексных умножителей, а выход подключен ко входу цифро-аналогового преобразователя (ЦАП);
в состав цифрового ППМ дополнительно введены первый коммутатор на два положения, выход которого соединен с входом (входящего в состав цифрового ППМ) блока цифровых полосовых фильтров, его первый вход через процессор формирования диаграммы направленности АФАР соединен с выходом цифрового синтезатора линейно-частотно-модулированного сигнала, а второй вход подключен к выходу АЦП приемного канала, и второй коммутатор на два положения, входы которого связаны с выходами блока цифровых полосовых фильтров, а первая группа выходов второго коммутатора подключена к первым входам первого блока цифровых комплексных умножителей, второй вход которого подключен к первой группе выходов блока формирования цифровых весовых коэффициентов, при этом вторая группа выходов второго коммутатора подключена к первым входам второго блока цифровых комплексных умножителей, второй вход которого подключен ко второй группе выходов блока формирования цифровых весовых коэффициентов.
Данные отличия от прототипа позволяют обеспечить согласованное формирование ДН АФАР в режимах излучения и приема широкополосных ЛЧМ-сигналов при широкоугольном электронном обзоре пространства, исключая при этом ее расфазирование.
Вариант технической реализации предлагаемого цифровой приемно-передающий модуля АФАР иллюстрируется фигурами 3 и 4. На фигуре 3 приведена структурная схема устройства формирования ДН, в состав которой входит цифровой синтезатор 19 ЛЧМ-сигнала, процессор 20 формирования ДН, блок 21 приемно-передающих модулей (ППМ), в состав которого входят М цифровых ППМ 22 с излучателями 23. Входы 24 и выходы 25 каждого цифрового ППМ 22 подключены к соответствующим выходам и входам процессора 20. Входы 26 каждого цифрового ППМ 22 подключены к входящим в состав процессора 20 датчикам направления фазирования АФАР θϕ в режимах передачи и приема.
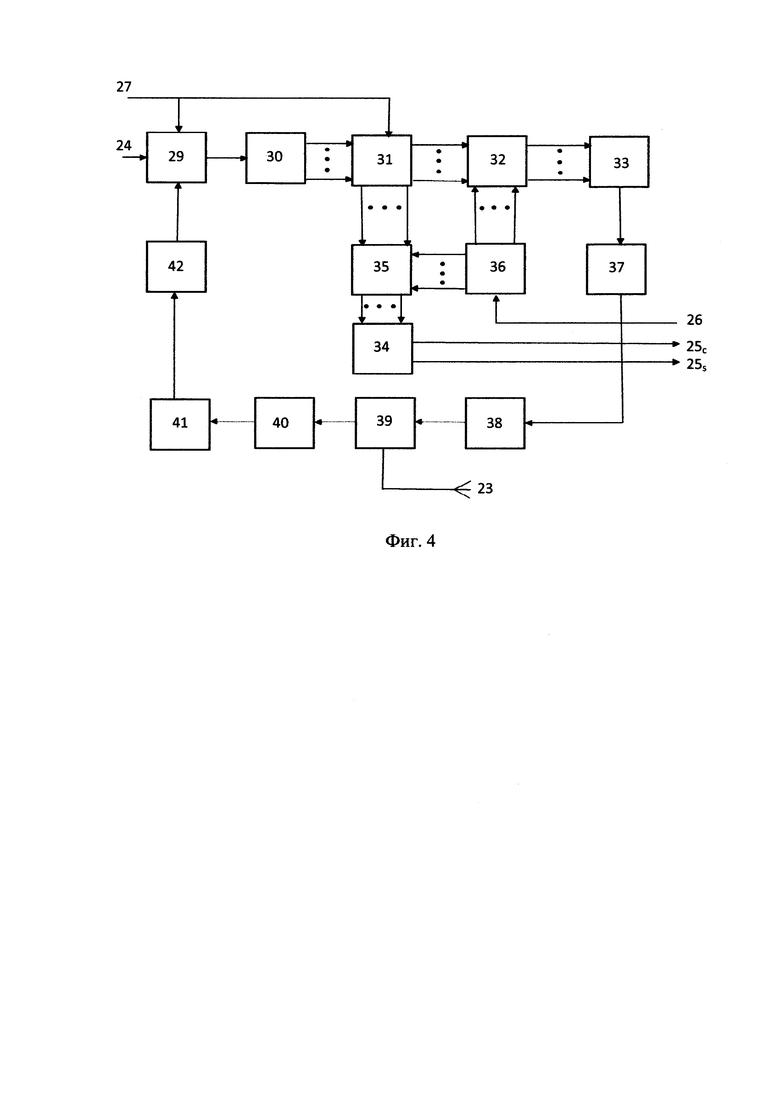
В состав структурной схемы ППМ 22, представленной на фигуре 4, входят два канала - передающий и приемный, а также общие для обоих каналов антенный переключатель 39, излучатель 23, первый коммутатор 29, второй коммутатор 31, блок 36 формирования цифровых весовых коэффициентов и блок 30 цифровых полосовых фильтров.
В состав передающего канала входят цифро-аналоговый преобразователь (ЦАП) 37, усилитель мощности 38, а также второй блок 32 цифровых комплексных умножителей и второй блок 33 цифровых комплексных сумматоров,
В состав приемного канала ППМ 22 входят последовательно включенные устройство защиты 40, малошумящий усилитель (МШУ) 41 и аналого-цифровой преобразователь (АЦП) 42, а также первый блок 35 цифровых комплексных умножителей и первый блок 34 цифровых комплексных сумматоров, квадратурные выходы 25 с и 25s которого являются выходами приемного канала соответствующего цифрового ППМ 22.
Работает представленное на фигурах 3 и 4 устройство следующим образом.
В режиме излучения синтезатор 19 формирует цифровой зондирующий ЛЧМ-сигнал длительностью τu с девиацией частоты Δƒc. Эти импульсы поступают на вход процессора 20, распределяющего их по входам 24 всех М ППМ 22 (фиг. 3). В каждом ППМ эти импульсы через переключатель каналов 29 поступают на вход блока 30 цифровых полосовых фильтров, который разделяет широкий спектр зондирующего сигнала  на I узкополосных участков спектра:
на I узкополосных участков спектра:  где спектр
где спектр  удовлетворяет критерию узкополосности (6) [11]. Комплексные огибающие сформированных таким образом узкополосных сигналов в каждом m-м ППМ 22 могут быть представлены в виде
удовлетворяет критерию узкополосности (6) [11]. Комплексные огибающие сформированных таким образом узкополосных сигналов в каждом m-м ППМ 22 могут быть представлены в виде

где ϕim(θизл) - набег фазы на m-м излучателе при излучении сигнала в направлении θизл:

ωi=2πƒi - центральная частота i-го узкополосного спектра, d - шаг антенной решетки, с - скорость света, Uim - амплитуда i-го сигнала.
Для компенсации набега фазы ϕim(θизл) комплексная огибающая каждого i-го сигнала умножается на комплексно сопряженный с ним весовой коэффициент

где θϕ - значения возможного направления излучения в пределах сектора электронного сканирования ДН АФАР.
Для этого все I узкополосных сигналов через переключатель каналов 31 поступают на первый вход второго блока цифровых комплексных умножителей 32, на вторые входы которого поступают цифровые коэффициенты Wi, сформированные в блоке 36 в соответствии с (15) по информации о заданном направлении излучения, поступающей с выхода 26 процессора 20 на соответствующий вход m-го ППМ.
В результате суммирования полученных произведений в блоке цифровых сумматоров 33 формируется комплексная огибающая зондирующего сигнала на выходе каждого m-го ППМ:

Этот сигнал преобразуется ЦАП 37 в аналоговую форму, усиливается по мощности УМ 38, через антенный переключатель 39 поступает на излучатель 23 каждого ППМ 22 и излучается в пространство. В результате суперпозиции всех М электромагнитных волн формируется нормированная ДН АФАР в режиме передачи в соответствии с соотношением

При выполнении условия θϕ=θизл нормированная диаграмма направленности Fпрд (θизл=θϕ) принимает максимальное значение Fпрд - 1.
Это означает, что АФАР сфазирована в заданном направлении θизл, иными словами ось главного лепестка ДН АФАР составляет угол θизл с нормалью к апертуре АФАР.
В режиме приема принятый излучателем 23 сигнал через антенный переключатель 39 и устройство защиты 40 поступает на вход МШУ 41, после усиления преобразуется в цифровую форму АЦП 42 и через первый переключатель каналов 29 поступает на вход блока 30 цифровых полосовых фильтров, который делит широкий спектр  на I узкополосных участков спектра
на I узкополосных участков спектра  , где спектр
, где спектр  удовлетворяет критерию узкополосности (6) [11].
удовлетворяет критерию узкополосности (6) [11].
При падении волны на апертуру АФАР с направления θпад относительно нормали к апертуре АФАР каждый i-й узкополосный сигнал на входе каждого m-го ППМ 4 получает фазовый сдвиг

Поэтому комплексную огибающую каждого i-го узкополосного сигнала можно представить в виде

Для компенсации фазового сдвига ϕim(θпад) необходимо комплексную огибающую (19) умножить на комплексно сопряженный с ней весовой коэффициент

где ωi=2πƒi - центральная частота i-го узкополосного спектра; θϕ - возможное направление падения волны на апертуру АФАР в пределах сектора электронного сканирования ДН АФАР.
Для этого все i-е узкополосные сигналы через второй переключатель 31 каналов поступают на первые входы первого блока 35 цифровых комплексных умножителей, на вторые входы которого поступают цифровые коэффициенты (20), сформированные блоком цифровых весовых коэффициентов 36 по информации, поступающей с выхода 26 процессора 20 на соответствующие входы каждого m-го ППМ 22. В результате перемножения формируются сигналы, комплексные огибающие которых можно записать в виде

Все эти I сигналов поступают на вход первого блока 34 цифровых комплексных сумматоров, в результате на выходе сумматора комплексная огибающая сигнала будет иметь вид

Это напряжение с выхода 25 каждого m-го цифрового ППМ поступает на соответствующий вход процессора 20, где в результате их суммирования формируется сигнал с выхода АФАР

Это напряжение с выхода 28 процессора 20 (фигура 3) поступает в систему первичной обработки радиолокационной информации РЛС, где используется для обнаружения сигнала и измерения координат цели. Напряжение (23) принимает максимальное значение при условии θϕ=θпад, т.е. при фазировании антенны в направлении на цель:

Деление выражения (23) на (24) дает соотношение (25), определяющее нормированную ДН АФАР в режиме приема

Таким образом, основная особенность предлагаемого устройства состоит в том, что цифровое формирование ДН АФАР осуществляется для каждого i-го узкополосного сигнала с последующим объединением полученных результатов не только в режиме приема, как это делается по прототипу, но и в режиме передачи, что прежде всего позволяет обеспечить согласованную точность управления лучом АФАР в режимах передачи и приема, т.е. исключить расфазировку передающего и приемного каналов ППМ, что в конечном счете позволяет обеспечить максимальное отношение сигнал-шум на входе приемного устройства РЛС.
Достигнуто упрощение технической реализации ППМ за счет того, что блок 30 цифровых полосовых фильтров является общим для передающего и приемного каналов ППМ, а также в состав обоих каналов ППМ входят одинаковые блоки цифровых комплексных умножителей (блоки 32 и 35) и сумматоров (блоки 33 и 34).
Проведенный авторами анализ источников научно-технической и патентной информации позволяет сделать вывод о новизне предлагаемых технических решений.
Источники информации
1. Патент РФ №2495447, G01S 3/80. 20.05.2013. Способ формирования диаграммы направленности.
2. Патент РФ №2495449, G01S 7/26. 10.10.2013. Устройство формирования диаграммы направленности активной фазированной антенной решетки.
3. Патент РФ №2451373, H01Q 3/26. 20.05.2013. Активная фазированная антенная решетка.
4. Патент США №5943010, H01Q 3/24. 1999-08-24. Direct digital synthesizer driven other publications phased array antenna.
5. Патент США №6784837, H01Q 3/22; HO1C 3/24; H01Q 3/26. 2003-08-21. Transmit/receiver module for active phased array antenna.
6. Патент США №6441783, H01Q 3/22; HO1C 3/24; HO1Q 3/26. 2002-08-27. Circuit module for a phased array/ M. Dean.
7. Патент РФ №2644456, H01Q 3/26. 12.02.2018. Способ формирования расширенной диаграммы направленности фазированной антенной решетки.
8. Патент РФ №2338307, H01Q 21/00, H01Q 3/26, H01Q 25/02. 10.11.2008. Активная фазированная антенная решетка.
9. Патент РФ №2516683, H01Q 21/00. 20.05.2014. Способ цифрового формирования диаграммы направленности активной фазированной антенной решетки при излучении и приеме линейно-частотно-модулированного сигнала.
10. Патент РФ №2732803, H01Q 21/00. 21.09.2020. Способ цифрового формирования диаграммы направленности активной фазированной антенной решетки при излучении и приеме линейно-частотно-модулированного сигнала.
11. Кольцов Ю.В. Особенности применения различных определений сверхширокополосных сигналов в антенной технике, связи и локации. // Антенны, 2008 г., вып. 6 (133), с. 31-42.
12. Frenzel L. High-Speed Data Converters Make Direct-Sampling Receivers Practical./ Electronic Design. Feb 12, 2019. - URL: https://www.electronicdesign. com/analog/high-speed-data-converters-make-direct-sampling-receivers-practical.
13. Multicore Fixed and Floating-Point Digital Signal Processor. Check for Evaluation Modules (EVM): TMS320C6678. Texas Instruments. TMS320C6672. SPRS708E-November 2010-Revised March 2014.
14. Speed per Milliwatt Rations for Fixed-Points Parcaged Processors/ Berkeley Design Technolog. Inc. Nov. 2013.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЦИФРОВОГО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ ПРИ ИЗЛУЧЕНИИ И ПРИЕМЕ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2021 |
|
RU2773648C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ШИРОКОПОЛОСНОГО ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА ПРИ ШИРОКОУГОЛЬНОМ ЭЛЕКТРОННОМ СКАНИРОВАНИИ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ | 2021 |
|
RU2774156C1 |
| СПОСОБ ЦИФРОВОГО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЁТКИ ПРИ ИЗЛУЧЕНИИ И ПРИЕМЕ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2020 |
|
RU2732803C1 |
| ЦИФРОВОЙ ПРИЕМНЫЙ МОДУЛЬ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2019 |
|
RU2722408C1 |
| АНАЛОГО-ЦИФРОВОЙ ПРИЕМНЫЙ МОДУЛЬ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2017 |
|
RU2692417C2 |
| СПОСОБ ВСТРОЕННОГО КОНТРОЛЯ ХАРАКТЕРИСТИК ЦИФРОВОЙ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ | 2020 |
|
RU2752553C1 |
| МНОГОЛУЧЕВАЯ САМОФОКУСИРУЮЩАЯСЯ АНТЕННАЯ РЕШЕТКА | 2014 |
|
RU2577827C1 |
| СПОСОБ ЦИФРОВОГО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ ПРИ ИЗЛУЧЕНИИ И ПРИЕМЕ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА | 2012 |
|
RU2516683C9 |
| Способ управления лучом в активной фазированной антенной решетке | 2023 |
|
RU2805384C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |

Изобретение относится к антенной технике, а именно, к активным фазированным антенным решеткам (АФАР) с цифровым формированием и управлением диаграммой направленности (ДН). Технический результат - обеспечение согласованного формирования ДН АФАР в режимах излучения и приема широкополосных линейно-частотно-модулированных (ЛЧМ) сигналов. Технический результат достигается тем, что цифровой приемно-передающий модуль (ППМ) АФАР импульсной РЛС, включающий передающий и приемный каналы, а также общие для обоих каналов антенный переключатель с излучателем, блок цифровых полосовых фильтров и блок формирования цифровых весовых коэффициентов, вход которого подключен к выходу входящего в состав процессора формирования ДН датчика направления максимума излучения АФАР, причем в состав передающего канала входят последовательно включенные ЦАП и усилитель мощности, выход которого подключен к входу антенного переключателя, а в состав приемного канала входят последовательно включенные устройство защиты, малошумящий усилитель (МШУ) и АЦП. 4 ил.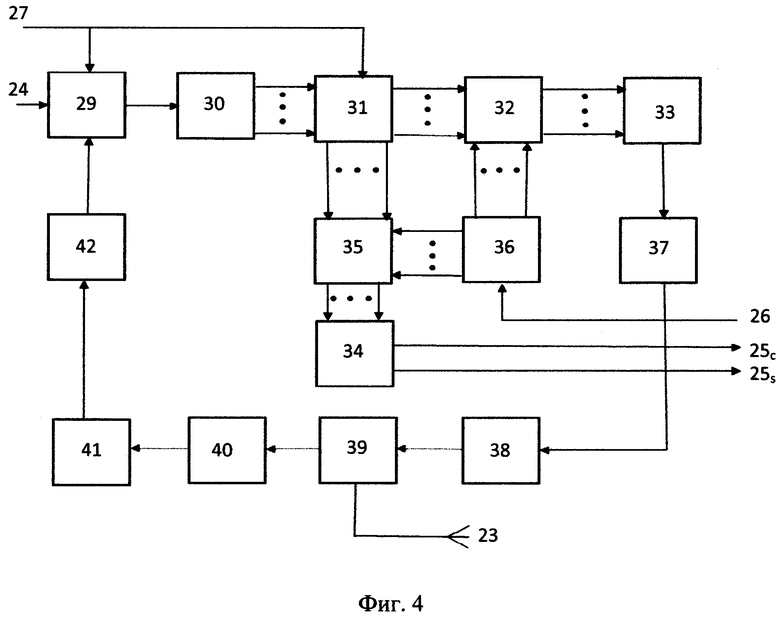
Цифровой приемно-передающий модуль (ППМ) активной фазированной антенной решетки (АФАР) импульсной РЛС, включающий передающий и приемный каналы, а также общие для обоих каналов антенный переключатель с излучателем, блок цифровых полосовых фильтров и блок формирования цифровых весовых коэффициентов, вход которого подключен к выходу входящего в состав процессора формирования диаграммы направленности датчика направления максимума излучения АФАР, причем в состав передающего канала входят последовательно включенные цифро-аналоговый преобразователь и усилитель мощности, выход которого подключен к входу антенного переключателя, а в состав приемного канала входят последовательно включенные устройство защиты, малошумящий усилитель (МШУ) и аналого-цифровой преобразователь (АЦП), кроме того, в состав приемного канала цифрового ППМ входят первый блок цифровых комплексных умножителей и первый блок цифровых комплексных сумматоров, вход которого подключен к выходу первого блока цифровых комплексных умножителей, а его квадратурные выходы являются выходами приемного канала соответствующего цифрового ППМ и соединены с соответствующими входами процессора формирования диаграммы направленности АФАР, отличающийся тем, что входящий в состав цифрового ППМ блок формирования цифровых весовых коэффициентов, вход которого подключен к выходу входящего в состав процессора формирования диаграммы направленности датчика направления фазирования АФАР в режимах излучения и приема, дополнительно снабжен второй группой выходов, при этом в состав передающего канала цифрового ППМ дополнительно введены второй блок цифровых комплексных умножителей и второй блок цифровых комплексных сумматоров, вход которого подключен к выходу второго блока цифровых комплексных умножителей, а выход подключен к входу цифро-аналогового преобразователя (ЦАП), кроме того, в состав цифрового ППМ дополнительно введены первый коммутатор на два положения, выход которого соединен с входом входящего в состав цифрового ППМ блока цифровых полосовых фильтров, его первый вход через процессор формирования диаграммы направленности АФАР соединен с выходом цифрового синтезатора линейно-частотно-модулированного сигнала, а второй вход подключен к выходу АЦП приемного канала, и второй коммутатор на два положения, входы которого связаны с выходами блока цифровых полосовых фильтров, а первая группа выходов второго коммутатора подключена к первым входам первого блока цифровых комплексных умножителей, второй вход которого подключен к первой группе выходов блока формирования цифровых весовых коэффициентов, при этом вторая группа выходов второго коммутатора подключена к первым входам второго блока цифровых комплексных умножителей, второй вход которого подключен ко второй группе выходов блока формирования цифровых весовых коэффициентов.
| СПОСОБ ЦИФРОВОГО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЁТКИ ПРИ ИЗЛУЧЕНИИ И ПРИЕМЕ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2020 |
|
RU2732803C1 |
| СПОСОБ ЦИФРОВОГО ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АКТИВНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ ПРИ ИЗЛУЧЕНИИ И ПРИЕМЕ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННОГО СИГНАЛА | 2012 |
|
RU2516683C9 |
| Способ формирования расширенной диаграммы направленности фазированной антенной решетки | 2016 |
|
RU2644456C1 |
| АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2007 |
|
RU2338307C1 |
| US 5861843 A1, 19.01.1999 | |||
| US 10090605 B2, 02.10.2018. | |||

