Устройство для калибровки радиолокационной станции по величине эффективной поверхности рассеяния при проведении динамических измерений радиолокационных характеристик космических и баллистических объектов.
Изобретение относится к области радиолокации и предназначено для обеспечения динамических измерений эффективной поверхности рассеяния (ЭПР) космических и баллистических объектов в миллиметровом, сантиметровом и дециметровом диапазонах длин волн.
Известны различные устройства для калибровки наземных радиолокационных измерительных комплексов (РИК), содержащие металлические эталонные отражатели (ЭО), устанавливаемые последовательно на малоотражающей вышке в дальней зоне излучения РИК [1]. Общий недостаток этих устройств состоит в низкой точности калибровки РИК.
Близким к предлагаемому устройству по технической сущности и достигаемому положительному эффекту является устройство калибровки одночастотной радиолокационной станции (РЛС) над морем, содержащее аттенюатор, подключенный к калибруемой РЛС, состоящей из последовательно соединенных передающего устройства, антенного переключателя, к первому и второму выходам которого подключены соответственно аттенюатор и приемопередающая антенна, и приемного устройства, к входу и выходу которого подключены соответственно аттенюатор и аналого-цифровой преобразователь с регистратором, а также содержащее металлический трехгранный уголковый отражатель, установленный на малоотражающей вышке в дальней зоне локации РЛС [2].
Недостатком данного устройства является ограниченная область его применения: только на полигонах с плоской, зеркально отражающей подстилающей поверхностью; для калибровки РЛС сантиметрового диапазона. Кроме того, для обеспечения потенциальной точности и воспроизводимости результатов калибровки измерительной РЛС необходимы стабилизация положения ЭО на вышке, а также периодическое равномерное изменение высоты его установки, в том числе в условиях взволнованной морской поверхности.
Известен космический аппарат с эталонными отражателями для юстировки и калибровки комплексов наземного и космического базирования - патент RU 2481248 «Космический аппарат с эталонными отражателями» [3].
Пусковая установка КА с эталонными отражателями взята за прототип. Пусковая установка состоит из цилиндрического контейнера, внутри которого размещается группа ЭО. Захват и подача очередного ЭО в исходное положение осуществляется с помощью пусковой каретки с пружинными толкателями, подпружиненными упорами и механизмом перемещения каретки с электропроводом. Тросовый механизм осуществляет подачу группы ЭО вперед после отделения очередного ЭО. Скорость отделения ЭО измеряется с помощью датчиков.
В прототипе для калибровки РЛС используются сферические эталонные отражатели.
Металлические сферы являются удобными эталонными рассеивателями, ЭПР которых могут быть вычислены точно [4] стр. 141, [5] стр. 204. Эталонная сфера обладает тем преимуществом для калибровки РЛС, что, в силу симметрии, величина ЭПР у нее постоянна [5] стр. 205.
Недостатком сферического отражателя является невозможность его использования для калибровки по величине ЭПР радиолокаторов, работающих на волнах круговой поляризации при параллельном приеме отраженных сигналов, так как для таких радиолокаторов отражатель сферической формы невидим [6] стр. 103. Другим недостатком сферического отражателя как эталона ЭПР, для РЛС, работающих на волнах горизонтальной, вертикальной, а также круговой поляризации при ортогональном приеме отраженных сигналов, является малая ЭПР сферы [6] стр.235. Так, например, при диаметре сферы 25 см и длине волны РЛС 7 см ее ЭПР составит всего 0,04 м2, а при длине волны РЛС 0,23 м ЭПР такого сферического отражателя равна 0,07 м2 [7] стр. 49, таблица 2.1.3. Значительно увеличить ЭПР сферического отражателя, т.е. его радиус, невозможно из-за габаритных ограничений КА. Кроме того, изготовить сферу больших размеров с высокой точностью чрезвычайно сложно, а вывести на орбиту почти невозможно [8] стр. 51.
Технический результат предполагаемого изобретения заключается в повышении эффективности калибровки РЛС и расширении функциональных возможностей устройства для калибровки РЛС по величине эффективной поверхности рассеяния при проведении динамических измерений радиолокационных характеристик космических и баллистических объектов.
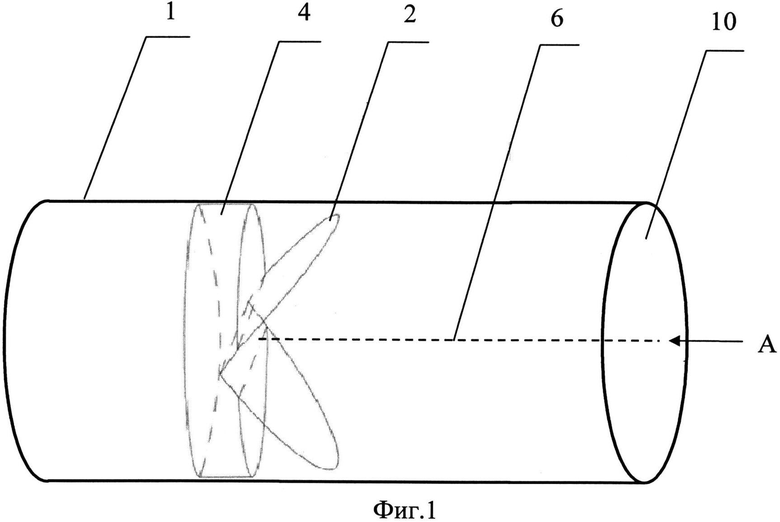
Указанный технический результат достигается тем, что устройство для калибровки РЛС по величине эффективной поверхности рассеяния при проведении динамических измерений радиолокационных характеристик космических и баллистических объектов содержит пусковую установку в виде цилиндрического контейнера 1 (см. фиг. 1). Внутри цилиндрического контейнера размещается эталонный отражатель, а сам цилиндрический контейнер размещается на борту космического аппарата или ракеты-носителя. При этом в качестве эталона эффективной поверхности рассеяния используется уголковый отражатель 2, грани которого состоят из двух плоских радиоотражающих полудисков 3, развернутых под фиксированным углом α в диапазоне от (90-Δ) до (90+Δ) градусов, где Δ определяется из соотношения:
0<Δ<18λ/а,
λ - длина волны калибруемой РЛС;
а - радиус полудиска грани уголкового отражателя (см. фиг. 1, фиг. 2).
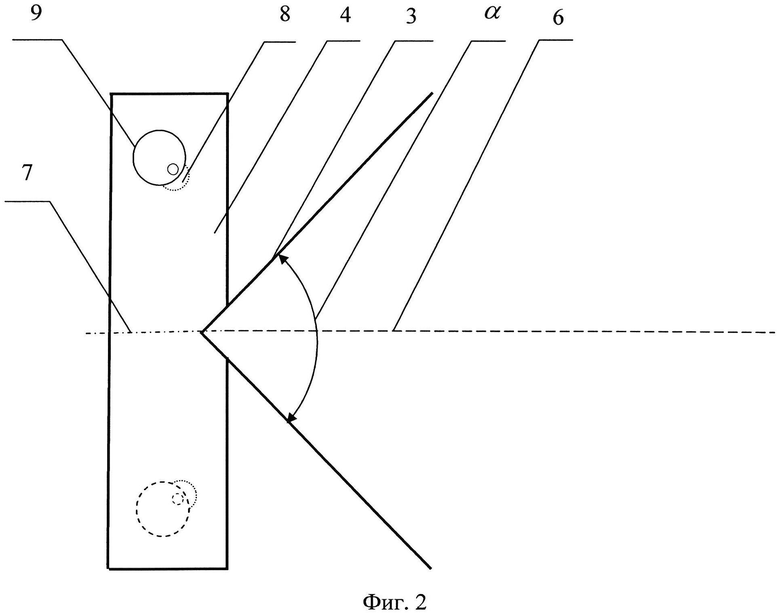
Дополнительно введено цилиндрическое основание 4, причем в верхней части цилиндрического основания симметрично относительно линии диаметра основания выполнен V-образный паз или углубление V-образной формы, где V-образно закреплен уголковый отражатель 2, грани которого состоят из двух плоских радиоотражающих полудисков 3, развернутых под фиксированным углом α (см. фиг. 1, фиг. 2).
При этом ребро 5 уголкового отражателя, грани которого состоят из двух плоских радиоотражающих полудисков 3, развернутых под фиксированным углом α, расположено по линии, совпадающей с диаметром основания. Причем биссектриса угла 6 между гранями в плоскости, перпендикулярной середине ребра уголкового отражателя, совпадает с продольной осью 7 цилиндрического основания 4. Кроме того, продольная ось 7 цилиндрического основания соосна продольной оси цилиндрического контейнера (см. фиг. 2, фиг. 3, фиг. 4).
Также дополнительно введен механизм выброса и закрутки уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, причем круговая частота закрутки или вращения ω уголкового отражателя вокруг продольной оси цилиндрического основания, совпадающей с биссектрисой угла между гранями в плоскости, перпендикулярной ребру уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, и проходящей через его середину, определяется из соотношения:
ω>12Fрлсπa/λ,
где Fрлс - частота следования импульсов излучения передатчика калибруемой РЛС;
а - радиус полудиска грани уголкового отражателя;
λ - длина волны калибруемой РЛС.
Сверх того, дополнительно введены контроллер управления, блок сопряжения контроллера управления с механизмом выброса и закрутки.
При этом вход контроллера управления подключен к системе управления космического аппарата или ракеты-носителя, а выход контроллера управления подключен к блоку сопряжения, при этом выход блока сопряжения подключен к механизму выброса и закрутки.
Причем контроллер управления и блок сопряжения соединены с энергосистемой КА либо РН.
Кроме того, механизм выброса и закрутки расположен внутри цилиндрического основания, на котором V-образно закреплен уголковый отражатель с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α.
Кроме того, механизм выброса и закрутки включает пороховые аккумуляторы давления с электровоспламенителями.
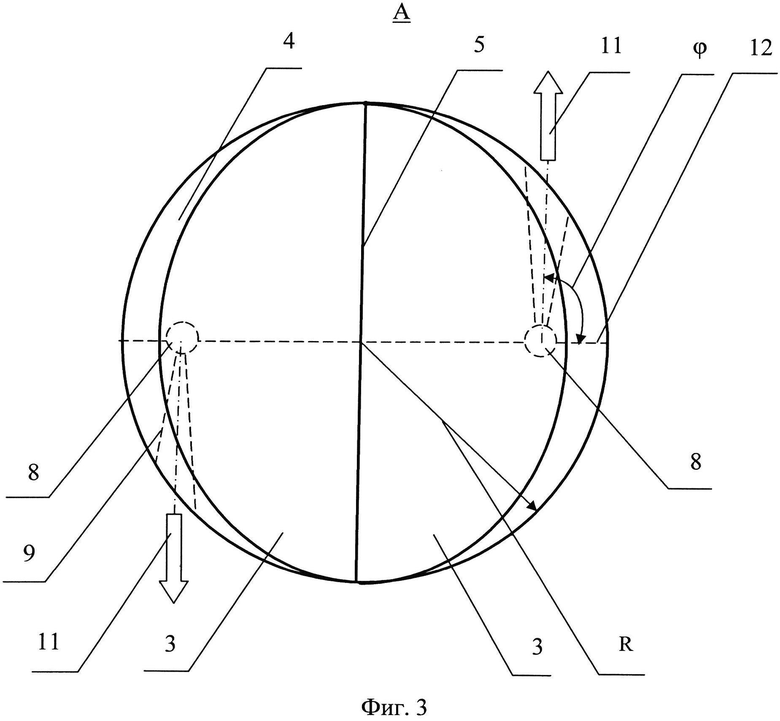
Кроме того, пороховые аккумуляторы давления 8 размещены по окружности внутри цилиндрического основания, причем радиус окружности меньше радиуса цилиндрического основания.
Кроме того, пороховые аккумуляторы давления 8 расположены симметрично относительно продольной оси цилиндрического основания.
Кроме того, векторы тяги пороховых аккумуляторов давления 8, расположенных симметрично относительно продольной оси цилиндрического основания, направлены в противоположные стороны и создают крутящий момент вокруг продольной оси цилиндрического основания.
Кроме того, сопла 9 пороховых аккумуляторов давления имеют угол наклона в диапазоне от 5 до 90 градусов относительно диаметра цилиндрического основания.
Кроме того, сопла 9 пороховых аккумуляторов давления имеют угол наклона в диапазоне от 0 до 90 градусов относительно продольной оси 7 цилиндрического основания.
Кроме того, сопла пороховых аккумуляторов давления расположены таким образом, что при воздействии газов сгорания пороховых аккумуляторов давления создается крутящий момент вокруг продольной оси цилиндрического основания либо по «по часовой стрелке», либо «против часовой стрелки».
Кроме того, при воздействии газов сгорания пороховых аккумуляторов давления одновременно осуществляется закрутка и выброс уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α.
Кроме того, механизм выброса и закрутки включает не менее двух пороховых аккумуляторов давления.
Кроме того, цилиндрический контейнер выполнен в виде стакана с таким внутренним диаметром, который обеспечивает размещение внутри стакана цилиндрического основания и уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, а также поступательное движение цилиндрического основания с уголковым отражателем вдоль продольной оси цилиндрического контейнера.
Кроме того, цилиндрический контейнер выполнен в виде стакана с таким внутренним диаметром, который обеспечивает вращательное движение цилиндрического основания с уголковым отражателем с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, вокруг продольной оси цилиндрического контейнера.
Кроме того, в торце цилиндрического контейнера со стороны выхода уголкового отражателя установлена легко разрушаемая заглушка 10.
Кроме того, цилиндрическое основание изготовлено из радиопрозрачного материала.
Кроме того, радиус цилиндрического основания определяется из соотношения:
R≥acos(90-α/2),
где а - радиус полудиска грани уголкового отражателя;
α - угол между гранями уголкового отражателя.
Кроме того, на поверхность верхней части цилиндрического основания помещен слой материала, поглощающего радиоволны в диапазоне работы калибруемой РЛС.
Кроме того, на внешней стороне граней уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, помещен слой материала, поглощающего радиоволны в диапазоне работы калибруемой РЛС.
Кроме того, пространство между верхней частью цилиндрического основания и тыльной стороной уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, заполнено материалом, поглощающим радиоволны в диапазоне работы калибруемой РЛС.
Кроме того, верхняя часть цилиндрического основания представляет собой две наклонные плоскости, образованные сечением цилиндрического основания двумя плоскостями, пересекающимися по диаметру основания, причем угол β наклона плоскостей может принимать значения от 0 до (45-Δ/2) градусов, где Δ определяется из соотношения:
0<Δ<18λ/a,
где λ - длина волны калибруемой РЛС;
α - радиус полудиска грани уголкового отражателя.
Предлагаемое устройство для калибровки РЛС по величине ЭПР поясняется чертежами на фиг.1-11.
Фиг. 1 - общий вид цилиндрического контейнера 1 с размещенным внутри уголковым отражателем 2 с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, на цилиндрическом основании 4, где 6 - биссектриса угла между гранями в плоскости, перпендикулярной середине ребра уголкового отражателя, 10 - легко разрушаемая заглушка.
Фиг. 2 - вид V-образно закрепленного на цилиндрическом основании уголкового отражателя с гранями из двух плоских радиоотражающих полудисков 3, развернутых под фиксированным углом α, где 4 -цилиндрическое основание, 6 - биссектриса угла между гранями в плоскости, перпендикулярной середине ребра уголкового отражателя, 7 - продольная ось цилиндрического основания, 8 - пороховые аккумуляторы давления, 9 - сопла пороховых аккумуляторов давления.
Фиг. 3 - вид V-образно закрепленного на цилиндрическом основании уголкового отражателя с гранями из двух плоских радиоотражающих полудисков 3, развернутых под фиксированным углом α, где 5 - ребро уголкового отражателя с гранями из двух плоских радиоотражающих полудисков 3, развернутых под фиксированным углом α, 8 - пороховые аккумуляторы давления, 9 - сопла пороховых аккумуляторов давления, 11 -направление вектора тяги пороховых аккумуляторов давления, 12 - диаметр цилиндрического основания, φ - угол наклона вектора тяги пороховых аккумуляторов давления относительно диаметра цилиндрического основания.
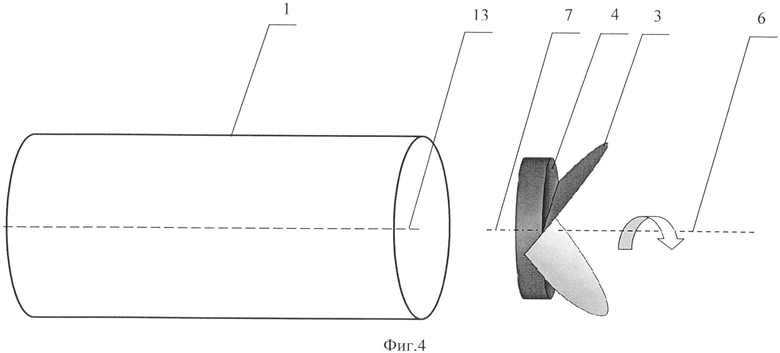
Фиг. 4 - вид V-образно закрепленного на цилиндрическом основании уголкового отражателя с гранями из двух плоских радиоотражающих полудисков 3, развернутых под фиксированным углом α, после выхода из контейнера 1, где 6 - биссектриса угла между гранями в плоскости, перпендикулярной середине ребра уголкового отражателя, 7 - продольная ось цилиндрического основания, 13 - продольная ось цилиндрического контейнера.
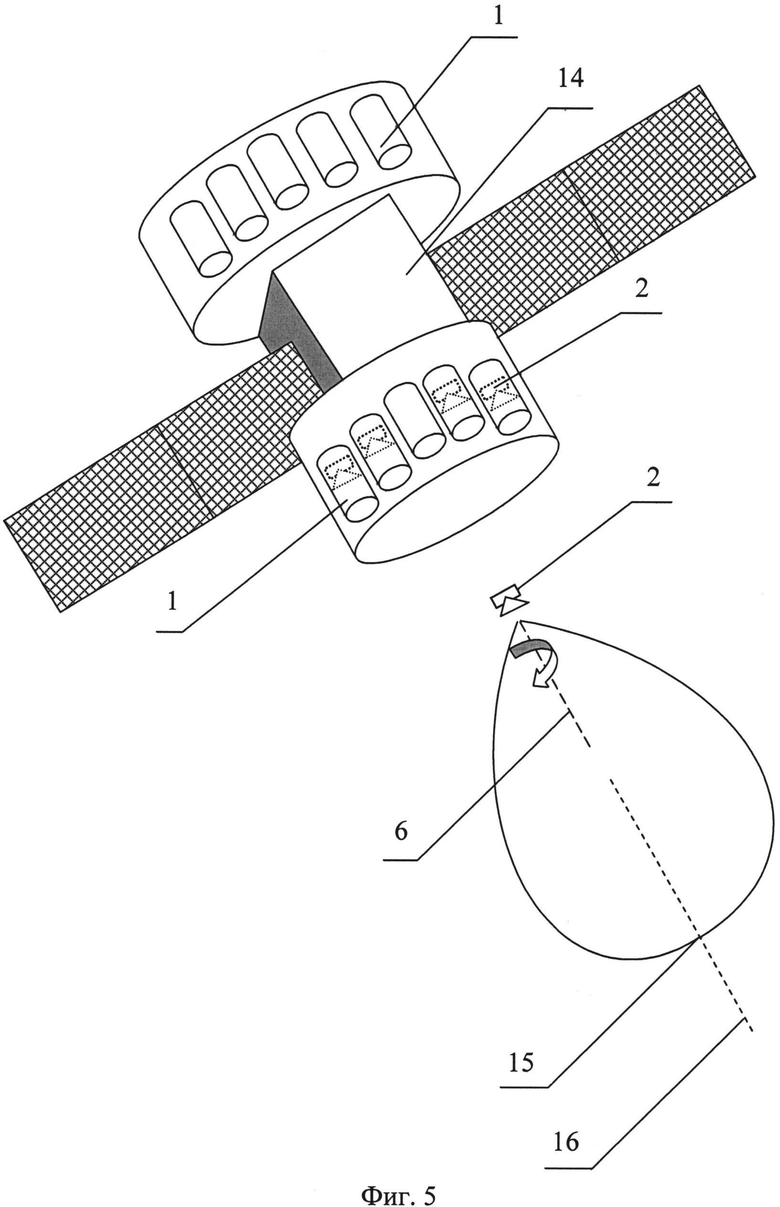
Фиг. 5 - общий вид космического аппарата 14 с размещенными на нем цилиндрическими контейнерами 1, внутри которых находятся V-образно закрепленные на цилиндрическом основании уголковые отражатели 2 с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, где 15 - максимум основного лепестка индикатрисы рассеяния уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, 16 - направление на калибруемую РЛС.
На фиг. 6 представлена блок-схема взаимосвязи системы управления (СУ) КА либо РН, контроллера управления (КУ), блока сопряжения (БС) контроллера управления с механизмом выброса и закрутки (МВИЗ) и энергосистемой (ЭС) КА либо РН, содержащая:
17 - систему управления КА либо РН (СУ);
18 - контроллер управления (КУ);
19 - энергосистему КА либо РН (ЭС);
20 - блок сопряжения (БС);
21 - механизм выброса и закрутки (МВИЗ).
Информационная связь на фиг. 6 обозначена стрелкой 
Вход контроллера управления подключен к системе управления КА
либо РН, выход КУ подключен к входу блока сопряжения, а выход БС подключен к механизму выброса и закрутки.
Отдельными линиями связи контроллер управления и блок сопряжения соединены с энергосистемой КА либо РН (на фиг. 6 обозначены тонкой сплошной линией).
Механизм выброса и закрутки соединен с энергосистемой КА либо РН через блок сопряжения (на фиг. 6 соединение обозначено тонкой сплошной линией).
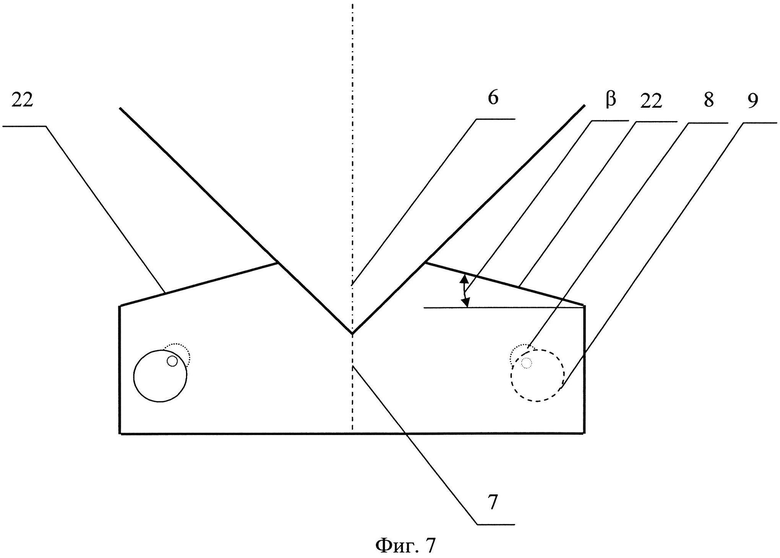
Фиг. 7 - вид V-образно закрепленного на цилиндрическом основании уголкового отражателя с гранями из двух плоских радиоотражающих полудисков. При этом на фиг. 7 обозначены: 22 - верхняя часть цилиндрического основания, β - угол наклона верхней части цилиндрического основания, 6 - биссектриса угла между гранями в плоскости, перпендикулярной середине ребра уголкового отражателя, 7 - продольная ось цилиндрического основания, 8 - пороховые аккумуляторы давления, 9 - сопла пороховых аккумуляторов давления.
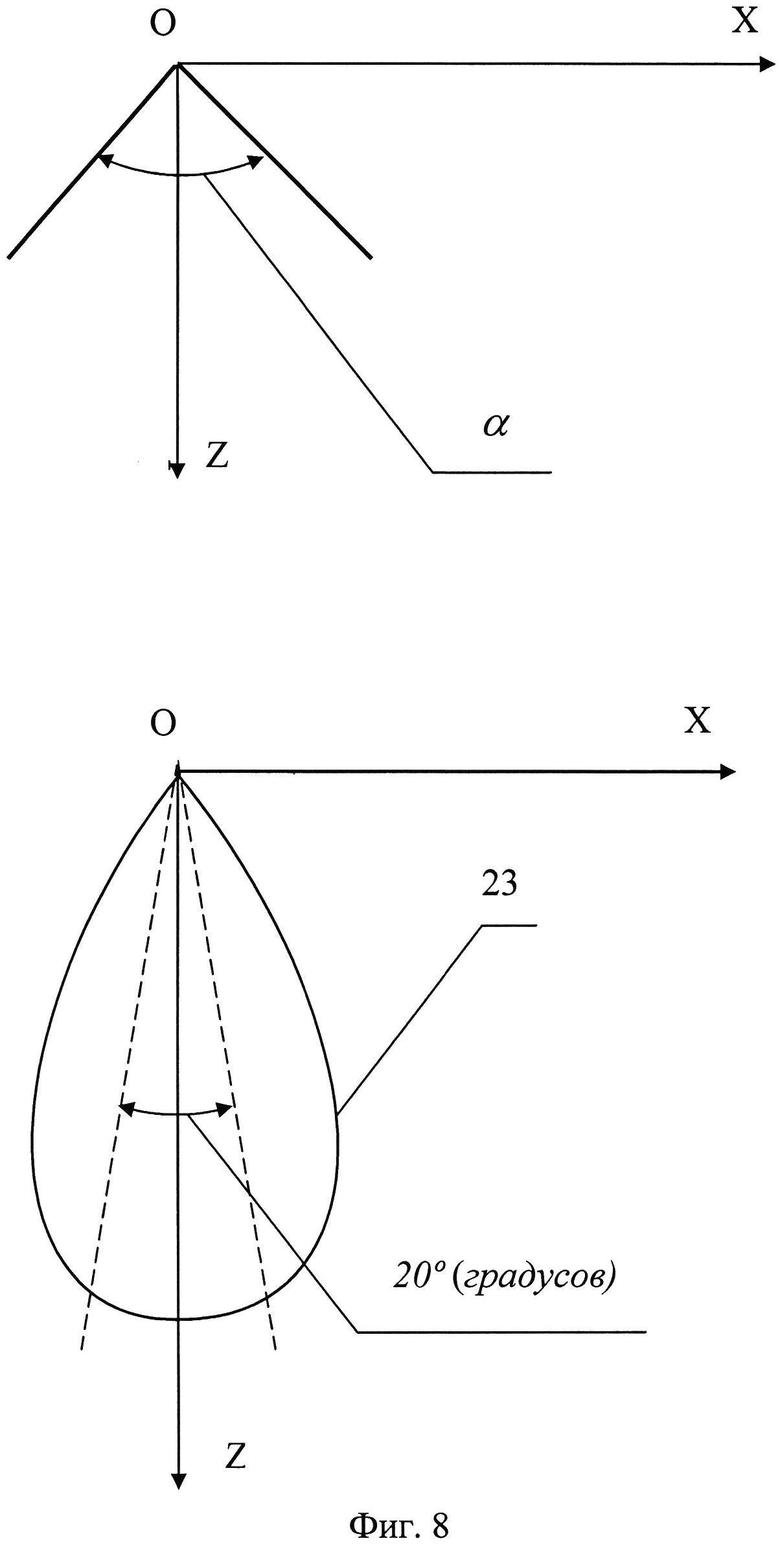
На фиг. 8 представлено сечение плоскостью XOZ основного лепестка пространственной индикатрисы рассеяния 23 уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α в диапазоне от (90-Δ) градусов до (90+Δ) градусов, где Δ определяется из соотношения:
0<Δ<18λ/а,
λ - длина волны калибруемой РЛС;
а - радиус полудиска грани уголкового отражателя.
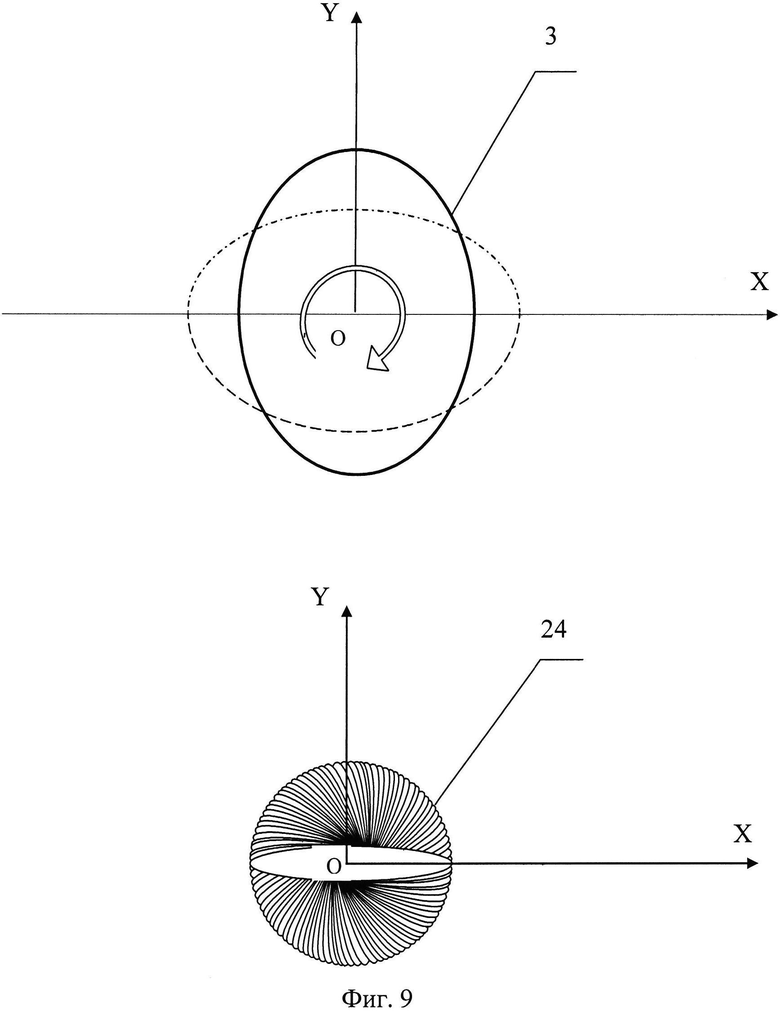
На фиг. 9 представлено сечение плоскостью XOY основного лепестка пространственной индикатрисы рассеяния 24, вращающегося уголкового отражателя вокруг биссектрисы угла между гранями в плоскости, перпендикулярной середине ребра уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α в диапазоне от (90-Δ) градусов до (90+Δ) градусов.
Для сравнения представлены:
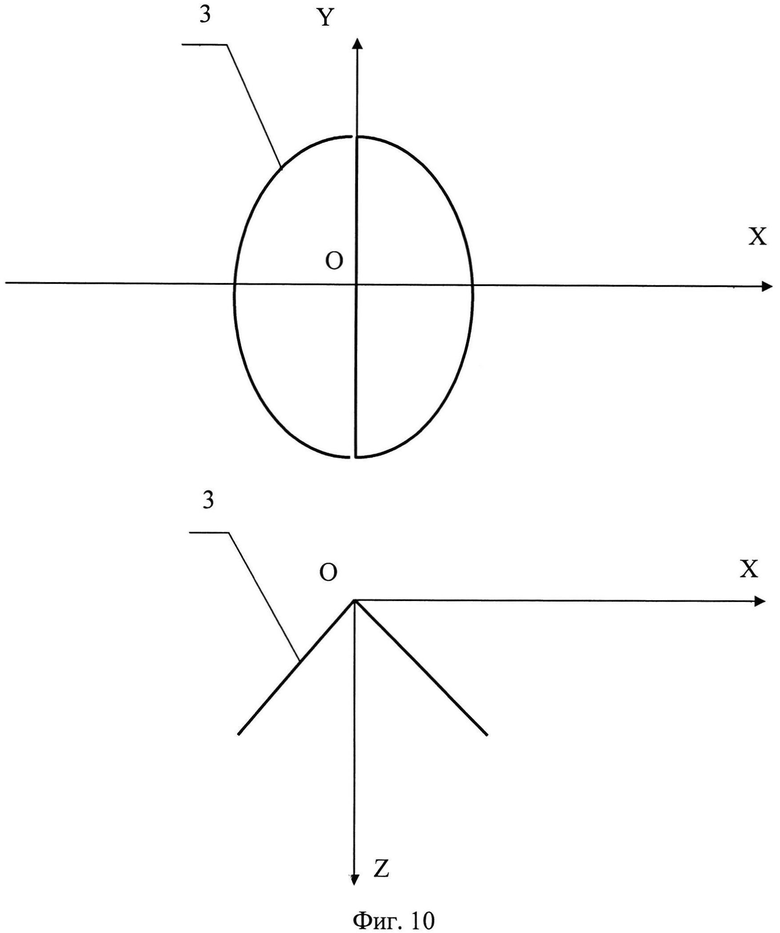
- на фиг. 10 - уголковый отражатель с гранями из двух плоских радиоотражающих полудисков с прямым углом между гранями в статическом состоянии (неподвижный);
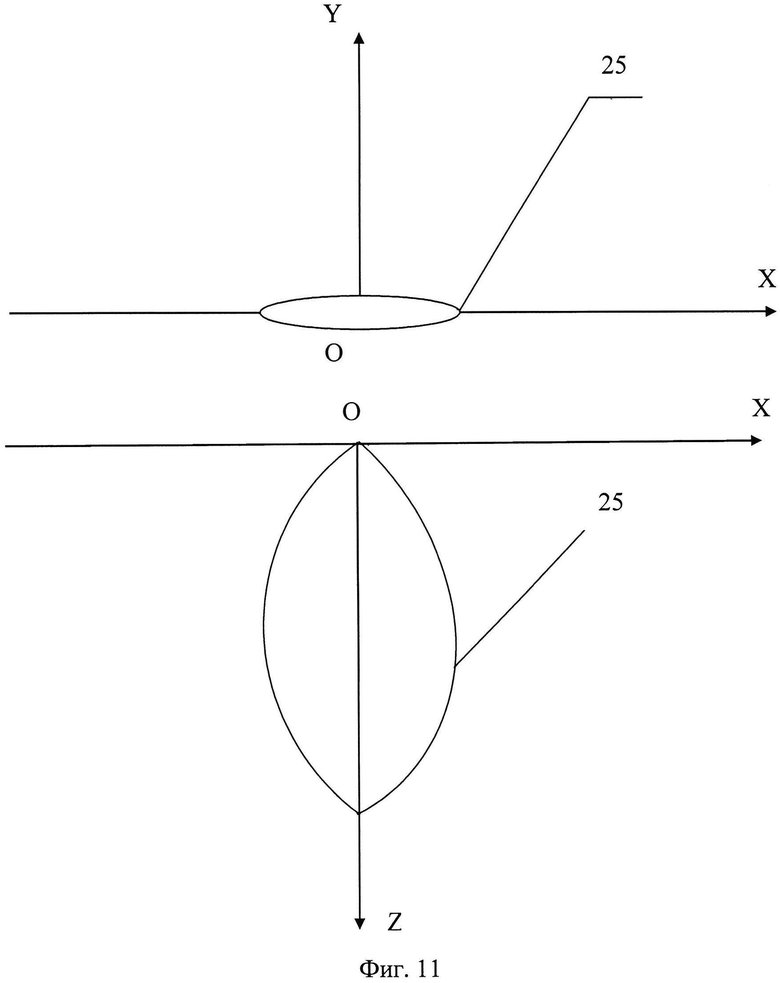
- на фиг. 11 - сечения плоскостями XOY и XOZ основного лепестка пространственной индикатрисы рассеяния статического (неподвижного) уголкового отражателя с гранями из двух плоских радиоотражающих полудисков с прямым углом между гранями.
Предлагаемое устройство для калибровки РЛС по величине ЭПР при проведении динамических измерений эффективной поверхности рассеяния баллистических и космических объектов содержит пусковую установку в виде цилиндрического контейнера 1, внутри которого размещается эталонный отражатель (фиг. 1). При этом в качестве эталона эффективной поверхности рассеяния используется уголковый отражатель 2 с гранями из двух плоских радиоотражающих полу дисков 3, развернутых под фиксированным углом α в диапазоне от (90-Δ) до (90+Δ) градусов, где Δ определяется из соотношения:
0<Δ<18λ/а,
λ - длина волны калибруемой РЛС;
а - радиус полудиска грани уголкового отражателя (см. фиг. 1, фиг. 2).
Дополнительно введено цилиндрическое основание 4, причем в верхней части цилиндрического основания симметрично относительно линии диаметра основания выполнен V-образный паз или углубление V-образной формы, где V-образно закреплен уголковый отражатель с гранями из двух плоских радиоотражающих полу дисков 3, развернутых под фиксированным углом α (см. фиг. 2).
При этом ребро уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, расположено по линии, совпадающей с диаметром основания. Причем биссектриса угла между гранями в плоскости, перпендикулярной середине ребра уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, совпадает с продольной осью цилиндрического основания.
Также дополнительно введены контроллер управления, механизм выброса и закрутки уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, блок сопряжения контроллера управления с механизмом выброса и закрутки.
При этом информационный вход контроллера управления подключен к системе управления космического аппарата или ракеты-носителя, кроме того, информационный выход контроллера управления подключен к информационному входу блока сопряжения, а выход блока сопряжения подключен к механизму выброса и закрутки, причем контроллер управления и блок сопряжения соединены с энергосистемой КА либо РН.
Предлагаемое устройство для калибровки РЛС по величине ЭПР при проведении динамических измерений эффективной поверхности рассеяния баллистических и космических объектов работает следующим образом. Прежде всего его размещают на борту КА либо ракеты-носителя (РН). После вывода КА на целевую орбиту либо осуществления запуска РН на высоту более 100 км с помощью системы управления КА либо РН производится ориентация продольной оси цилиндрического контейнера вдоль линии визирования калибруемой РЛС. Затем от системы управления КА либо РН поступает сигнал на контроллер управления. По сигналу контроллера управления через блок сопряжения от энергосистемы КА либо РН на механизм выброса и закрутки подается напряжение на электровоспламенитель и приводятся в действие пороховые аккумуляторы давления механизма выброса и закрутки. Под действием газов сгорания пороховых аккумуляторов давления цилиндрическое основание с V-образно закрепленным уголковым отражателем с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом от, выбрасывается из цилиндрического контейнера. Одновременно за счет наклона сопел пороховых аккумуляторов давления уголковому отражателю с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, придается вращательное движение вокруг оси цилиндрического основания, совпадающей с биссектрисой угла между гранями в плоскости, перпендикулярной середине ребра УО. При этом максимум основного лепестка индикатрисы рассеяния УО 15 оказывается направленным на калибруемую РЛС 16 (см. фиг. 5).
Использование уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α в диапазоне от (90-Δ) до (90+Δ) градусов, позволяет достичь «уплощения» формы основного лепестка индикатрисы рассеяния УО в горизонтальной плоскости. Тем самым сектор углов основного лепестка индикатрисы рассеяния УО в горизонтальной плоскости, в котором его ЭПР является практически постоянной величиной, составляет 20°(±10°), [6], стр. 150, рис. 4.7, кривые 2, 3.
При этом Δ определяется из соотношения:
0<Δ<18λ/а,
где λ - длина волны калибруемой РЛС;
а - радиус полудиска грани уголкового отражателя.
Введение цилиндрического основания, на котором V-образно закреплен уголковый отражатель, позволяет совместить биссектрису угла между гранями в плоскости, перпендикулярной середине ребра уголкового отражателя, с продольной осью цилиндрического контейнера и обеспечить при этом в момент отделения ориентацию максимума основного лепестка индикатрисы рассеяния уголкового отражателя в направлении калибруемой РЛС.
Использование механизма выброса и закрутки уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, позволяет отделить его от КА либо РН. Сверх того, позволяет придать уголковому отражателю из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, вращательное движение вокруг оси, совпадающей с биссектрисой угла между гранями УО в плоскости, перпендикулярной середине ребра УО. При этом позволяет сохранить ориентацию основного лепестка индикатрисы рассеяния и обеспечить постоянное значение ЭПР уголкового отражателя из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, в направлении РЛС в течение всего сеанса калибровки РЛС по величине ЭПР.
Применение закрутки уголкового отражателя из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, с круговой частотой
ω>12Fрлсπa/λ,
где Fрлс - частота следования импульсов излучения передатчика калибруемой РЛС;
a - радиус полудиска грани уголкового отражателя;
λ - длина волны калибруемой РЛС,
позволяет получить эффективный отражатель с относительно широкой индикатрисой рассеяния 23, не менее 30 градусов на уровне минус 3 дБ (при условии 2πа/λ>>1) и «уплощенной» формой основного лепестка индикатрисы рассеяния 24 в двух плоскостях - вертикальной и горизонтальной (см. фиг. 8, фиг. 9).
При этом ширина основного лепестка индикатрисы рассеяния в обеих плоскостях (вертикальной и горизонтальной) уголкового отражателя, вращающегося вокруг оси, совпадающей с биссектрисой угла между гранями, в плоскости, перпендикулярной середине ребра, одинакова и равна ширине основного лепестка индикатрисы рассеяния статического (неподвижного) уголкового отражателя в горизонтальной плоскости 25 (см. фиг. 11).
Тем самым сектор углов основного лепестка индикатрисы рассеяния УО, в котором его ЭПР является практически постоянной величиной, в вертикальной и горизонтальной плоскости составляет 20° (±10°) (см. фиг. 8, фиг. 9).
Использование контроллера управления, блока сопряжения, а также информационной связи данных элементов устройства с системой управления космического аппарата или ракеты-носителя и подключение устройства к энергосистеме КА либо РН позволяет перед отделением УО осуществить ориентацию продольной оси цилиндрического контейнера вдоль линии визирования калибруемой РЛС, а затем привести в действие устройство для калибровки РЛС.
Следует отметить, что с увеличением ЭПР эталонного отражателя эффективность калибровки растет [9] стр. 65. Так, в качестве примера, значение ЭПР при радиусе полудиска грани уголкового отражателя 12,5 см в направлении РЛС, работающей на длине волны 7 см, составит 5 м2, что в 125 раз больше ЭПР сферического отражателя диаметром 25 см [1] стр. 49, таблица 2.1.3. При этом дальность обнаружения уголкового отражателя, а значит и дальность, на которой возможно калибровать РЛС по величине ЭПР, увеличится в 3 раза по сравнению со сферическим отражателем диаметром 25 см.
Отсюда следует, что эффективность калибровки РЛС при использовании в предлагаемом устройстве уголкового отражателя с углом α между гранями, заданным в определенном диапазоне градусов, вращающегося вокруг оси, совпадающей с биссектрисой угла между гранями, по сравнению с использованием для этой цели сферического отражателя диаметром 25 см, значительно выше.
Таким образом, предлагаемое устройство для калибровки РЛС, информационная связь элементов устройства с системой управления космического аппарата или ракеты-носителя и подключение устройства к энергосистеме КА либо РН позволяют получить свойства, отличные от свойств известных решений, а именно:
- высокоэффективную поверхность рассеяния (большую ЭПР) и постоянное значение ЭПР в направлении калибруемой РЛС;
- широкую индикатрису рассеяния 24 в горизонтальной и вертикальной плоскости (не менее 30 градусов) за счет вращения уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, вокруг оси, совпадающей с биссектрисой угла между гранями УО, в плоскости, перпендикулярной ребру и проходящей через его середину с частотой:
ω>12Fрлсπa/λ,
где Fрлс - частота следования импульсов излучения передатчика калибруемой РЛС;
a - радиус полудиска грани уголкового отражателя;
λ - длина волны калибруемой РЛС (см. фиг. 9).
Это позволяет сделать вывод о возможности применения предлагаемого устройства как эталона ЭПР для калибровки РЛС при динамических измерениях ЭПР космических и баллистических объектов.
Источники информации
1. Дибдал Р.Б. Методы измерения эффективной площади отражения радиолокационных целей. ТИИЭР. 1987. Т. 75. №4. С. 78-99.
2. Леонтьев В.В. Методика калибровки РЛС при измерении эффективной площади рассеяния цели над морем. Измерительная техника. 2002. №11. С. 37-40.
3. Патент RU №2481248, 27.12.2011. Космический аппарат с эталонными отражателями / Савельев Б.И. Открытое акционерное общество "Военно-промышленная корпорация "Научно-производственное объединение машиностроения".
4. Перунов Ю.М., Мацукевич В.В., Васильев А.А. Зарубежные радиоэлектронные средства / под ред. Перунова Ю.М. Кн. 3. Антенны. М.: Радиотехника. 2010. С. 141.
5. Майзельс Е.Н., Торгованов В.А. Измерение характеристик рассеяния радиолокационных целей / под ред. Колосова М.А. М.: Советское радио. 1972. С. 144-145, с. 193-194, с. 204-213.
6. Кобак В.О. Радиолокационные отражатели / под ред. Леонтьевского О.Н. М.: Советское радио. 1975. С. 103, с. 139, с. 144, с. 146, с. 150, с. 152, с. 235.
7. Малые космические аппараты информационного обеспечения / под ред. Фатеева В.Ф. М.: Радиотехника. 2010. С. 47-50, с. 259.
8. Леонов А.И., Леонов С.А., Нагулинко Ф.В. и др. Испытания РЛС / под ред. Леонова А.И. М.: Радио и связь. 1990. С. 37, с 51.
9. Фатеев В.Ф. Современный взгляд на развитие космического эшелона информационных средств ВКО. Воздушно космическая оборона. 2014. №1. С. 65.

Изобретение относится к области радиолокации и предназначено для обеспечения динамических измерений эффективной поверхности рассеяния (ЭПР) космических и баллистических объектов в миллиметровом, сантиметровом и дециметровом диапазонах длин волн. Достигаемый технический результат - повышение эффективности калибровки радиолокационных станций и расширение функциональных возможностей. Указанный результат достигается за счет того, что устройство содержит пусковую установку в виде цилиндрического контейнера, внутри которого размещается эталонный отражатель. В качестве эталона эффективной поверхности рассеяния используется уголковый отражатель с гранями из двух плоских радиоотражающих полудисков, развернутых определенным образом. Устройство также содержит цилиндрическое основание, на котором V-образно закреплен уголковый отражатель. Ребро уголкового отражателя расположено по линии, совпадающей с диаметром основания, а биссектриса угла между гранями в плоскости, перпендикулярной середине ребра уголкового отражателя, совпадает с продольной осью цилиндрического основания. Продольная ось цилиндрического основания соосна продольной оси цилиндрического контейнера. В состав устройства также входят механизм выброса и закрутки уголкового отражателя, контроллер управления, блок сопряжения контроллера управления с механизмом выброса и закрутки. Вход контроллера управления подключен к системе управления космического аппарата или ракеты-носителя, а выход контроллера управления подключен к блоку сопряжения, выход блока сопряжения подключен к механизму выброса и закрутки. 19 з.п. ф-лы, 11 ил.
1. Устройство для калибровки радиолокационной станции по величине эффективной поверхности рассеяния при проведении динамических измерений радиолокационных характеристик космических и баллистических объектов, содержащее пусковую установку в виде цилиндрического контейнера, внутри которого размещается эталонный отражатель, отличающееся тем, что цилиндрический контейнер размещается на борту космического аппарата или ракеты-носителя, а в качестве эталона эффективной поверхности рассеяния используется уголковый отражатель с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α в диапазоне от (90-Δ) до (90+Δ) градусов, где Δ определяется из соотношения:
0<Δ<18λ/a,
λ - длина волны калибруемой радиолокационной станции (РЛС);
a - радиус полудиска грани уголкового отражателя,
также, дополнительно введено цилиндрическое основание, причем в верхней части цилиндрического основания симметрично относительно линии диаметра основания выполнен V-образный паз или углубление V-образной формы, где V-образно закреплен уголковый отражатель с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, при этом ребро уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, расположено по линии, совпадающей с диаметром основания, причем биссектриса угла между гранями в плоскости, перпендикулярной середине ребра уголкового отражателя из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, совпадает с продольной осью цилиндрического основания, кроме того, продольная ось цилиндрического основания соосна продольной оси цилиндрического контейнера, также дополнительно введены механизм выброса и закрутки уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, причем круговая частота закрутки или вращения ω уголкового отражателя вокруг продольной оси цилиндрического основания, совпадающей с биссектрисой угла между гранями, в плоскости, перпендикулярной ребру уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, и проходящей через его середину, определяется из соотношения:
ω>12Fрлсπa/λ,
где Fрлс - частота следования импульсов излучения передатчика калибруемой РЛС;
a - радиус полудиска грани уголкового отражателя;
λ - длина волны калибруемой РЛС,
сверх того, дополнительно введен контроллер управления, блок сопряжения контроллера управления с механизмом выброса и закрутки, при этом вход контроллера управления подключен к системе управления космического аппарата или ракеты-носителя, а выход контроллера управления подключен к входу блока сопряжения, при этом выход блока сопряжения подключен к механизму выброса и закрутки, кроме того, контроллер управления и блок сопряжения соединены с энергосистемой КА либо РН.
2. Устройство по п. 1, отличающееся тем, что механизм выброса и закрутки расположен внутри цилиндрического основания, на котором V-образно закреплен уголковый отражатель с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α.
3. Устройство по п. 2, отличающееся тем, что механизм выброса и закрутки включает пороховые аккумуляторы давления с электровоспламенителями.
4. Устройство по п. 3, отличающееся тем, что пороховые аккумуляторы давления размещены по окружности внутри цилиндрического основания, причем радиус окружности меньше радиуса цилиндрического основания.
5. Устройство по п. 3, отличающееся тем, что пороховые аккумуляторы давления расположены симметрично относительно продольной оси цилиндрического основания.
6. Устройство по п. 5, отличающееся тем, что векторы тяги, пороховых аккумуляторов давления, расположенных симметрично относительно продольной оси цилиндрического основания, направлены в противоположные стороны и создают крутящий момент вокруг продольной оси цилиндрического основания.
7. Устройство по п. 3, отличающееся тем, что сопла пороховых аккумуляторов давления имеют угол наклона в диапазоне от 5 до 90 градусов относительно диаметра цилиндрического основания.
8. Устройство по п. 3, отличающееся тем, что сопла пороховых аккумуляторов давления имеют угол наклона в диапазоне от 0 до 90 градусов относительно продольной оси цилиндрического основания.
9. Устройство по п. 3, отличающееся тем, что сопла пороховых аккумуляторов давления расположены таким образом, что при воздействии газов сгорания пороховых аккумуляторов давления создается крутящий момент вокруг продольной оси цилиндрического основания либо «по часовой стрелке», либо «против часовой стрелки».
10. Устройство по п. 3, отличающееся тем, что при воздействии газов сгорания пороховых аккумуляторов давления одновременно осуществляется закрутка и выброс уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α.
11. Устройство по п. 1, отличающееся тем, что механизм выброса и закрутки включает не менее двух пороховых аккумуляторов давления.
12. Устройство по п. 1, отличающееся тем, что цилиндрический контейнер выполнен в виде стакана с таким внутренним диаметром, который обеспечивает размещение внутри стакана цилиндрического основания с уголковым отражателем с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, а также поступательное движение цилиндрического основания с уголковым отражателем вдоль продольной оси цилиндрического контейнера.
13. Устройство по п. 1, отличающееся тем, что цилиндрический контейнер выполнен в виде стакана с таким внутренним диаметром, который обеспечивает вращательное движение цилиндрического основания с уголковым отражателем с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, вокруг продольной оси цилиндрического контейнера.
14. Устройство по п. 1, отличающееся тем, что в торце цилиндрического контейнера со стороны выхода уголкового отражателя установлена легко разрушаемая заглушка.
15. Устройство по п. 1, отличающееся тем, что цилиндрическое основание изготовлено из радиопрозрачного материала.
16. Устройство по п. 1, отличающееся тем, что радиус цилиндрического основания определяется из соотношения:
R≥acos(90-α/2),
где a - радиус полудиска грани уголкового отражателя;
α - угол между гранями уголкового отражателя.
17. Устройство по п. 1, отличающееся тем, что на поверхность верхней части цилиндрического основания помещен слой материала, поглощающего радиоволны в диапазоне работы калибруемой РЛС.
18. Устройство по п. 1, отличающееся тем, что на внешней стороне граней уголкового отражателя из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, помещен слой материала, поглощающего радиоволны в диапазоне работы калибруемой РЛС.
19. Устройство по п. 1, отличающееся тем, что пространство между верхней частью цилиндрического основания и тыльной стороной уголкового отражателя с гранями из двух плоских радиоотражающих полудисков, развернутых под фиксированным углом α, заполнено материалом, поглощающим радиоволны в диапазоне работы калибруемой РЛС.
20. Устройство по п. 1, отличающееся тем, что верхняя часть цилиндрического основания представляет собой две наклонные плоскости, образованные сечением цилиндрического основания двумя плоскостями, пересекающимися по диаметру цилиндрического основания, причем угол β наклона плоскостей может принимать значения от 0 до (45-Δ/2) градусов, где Δ определяется из соотношения:
0<Δ<18λ/a,
λ - длина волны калибруемой РЛС;
a - радиус полудиска грани уголкового отражателя.

