ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
[0001] Настоящее изобретение относится по существу к медицинским зондам и, в частности, к инвазивным медицинским зондам, включающим режущий конец.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Некоторые медицинские зонды (например, дебридеры) включают в себя режущие лезвия (также известные как режущие концы), которые можно использовать для удаления ткани во время инвазивной медицинской процедуры. Эти медицинские зонды, как правило, включают в себя датчики положения, которые можно использовать для отслеживания текущего местоположения и ориентации режущего лезвия.
[0003] В патенте США № 7,720,521 Chang et al. описано устройство для проведения операций внутри полости уха, носа, горла и в околоносовой пазухе. Устройство включает в себя датчик, который можно использовать для определения местоположения терапевтического устройства (например, иглы, дебридера или резака), прикрепленного к устройству.
[0004] В заявке на патент США 2008/0118725 Lloyd описана система визуального подтверждения регистрации и обратной связи компьютерной томографии (КТ). Система выполнена с возможностью отслеживания различных типов хирургических устройств внутри пациента во время медицинской процедуры.
[0005] В патенте США № 7,559,925 Goldfarb et al. описаны устройства для облегчения визуального контроля в хирургической среде. Эти устройства включают в себя флюороскоп, первое устройство ввода (например, направитель в пазухе, направляющий катетер или направляющая трубка), которое выполнено с возможностью ввода под прямым визуальным контролем (например, с помощью флюороскопа), второе устройство ввода (например, проволочный направитель или удлиненный зонд) и рабочее устройство (например, баллонный катетер, дилатационный катетер, дебридер или резак).
[0006] В заявке на патент США 2005/0054900 Mawn et al. описан глазной орбитальный хирургический аппарат и навигационная система с визуальным контролем. Аппарат и система включают в себя гибкий эндоскоп, жесткий эндоскоп, имеющий магнитный наконечник для отслеживания, и магнитную систему слежения, выполненную с возможностью определения магнитного наконечника для отслеживания в трехмерном пространстве и передачи данных о местоположении магнитного наконечника для отслеживания в аппарат для сбора и обработки физических пространственных данных.
[0007] Вышеприведенное описание представлено в качестве общего обзора уровня техники в данной области, и его не следует воспринимать, как признание того, что любая содержащаяся в нем информация составляет предшествующий уровень техники, противопоставляемый настоящей заявке на патент.
[0008] Документы, включенные в настоящую заявку на патент путем ссылки, следует считать неотъемлемой частью заявки за исключением того, что, если определение терминов в этих включенных документах противоречит определениям, сделанным явным или неявным образом в настоящем описании, следует учитывать только определения настоящего описания.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0009] В соответствии с одним вариантом осуществления настоящего изобретения обеспечивается медицинский аппарат, включающий в себя вводимую трубку, имеющую проксимальный конец и дистальный конец, для введения в полость тела, включающего в себя одну или более анатомических структур. Этот медицинский аппарат также включает в себя режущее лезвие, установленное на дистальном конце вводимой трубки, ручку, прикрепленную к проксимальному концу и включающую в себя предупреждающее устройство, которое генерирует различные чувствительные выходные сигналы в ответ на получение различных активирующих сигналов, и датчик положения, закрепленный в заданном расположении относительно вводимой трубки. Медицинский аппарат дополнительно включает в себя процессор, выполненный с возможностью получения от системы визуализации трехмерного (3D) изображения полости тела, определения по 3D-изображению 3D-местоположений соответствующих структур для каждой из одной или более анатомических структур, получения от датчика положения сигнала положения, указывающего 3D-местоположение режущего лезвия внутри полости тела, определения на основании 3D-местоположения лезвия и 3D-местоположений соответствующих структур близости режущего лезвия к данной анатомической структуре и передачи данного активирующего сигнала на устройство предупреждения в ответ на определенную близость к данной анатомической структуре.
[0010] В некоторых вариантах осуществления устройство предупреждения выполнено с возможностью отсоединения от ручки. В дополнительных вариантах осуществления устройство предупреждения включает в себя подсвечивающее устройство или устройство генерирования звука. В вариантах осуществления, в которых устройство предупреждения включает в себя подсвечивающее устройство, причем чувствительный выходной сигнал, генерируемый подсвечивающим устройством в ответ на определенную близость к данной анатомической структуре, включает в себя свет различного цвета, различной интенсивности или различной продолжительности. В вариантах осуществления, в которых устройство предупреждения включает в себя устройство генерирования звука, чувствительный выходной сигнал, генерируемый устройством генерирования звука в ответ на определенную близость к данной анатомической структуре, включает в себя звуки, имеющие различные тоны, различные частоты, различные уровни громкости, различную продолжительность, различные скорости повторения или различные синтезированные слова.
[0011] Медицинский аппарат может включать в себя дисплей, а процессор может быть выполнен с возможностью представления на дисплее чувствительного выходного сигнала в ответ на определенную близость к данной анатомической структуре. В дополнительных вариантах осуществления датчик положения включает в себя трехосную спираль. В дополнительных вариантах осуществления система визуализации включает в себя компьютерный томограф.
[0012] В некоторых вариантах осуществления система визуализации включает в себя систему координат изображения, в которой датчик положения включает в себя систему координат датчика, и в которой процессор выполнен с возможностью регистрации системы координат датчика в системе координат изображения перед получением сигнала положения, указывающего 3D-местоположение режущего лезвия внутри полости тела. В дополнительных вариантах осуществления медицинский аппарат включает в себя двигатель, установленный внутри ручки и выполненный с возможностью вращения режущего лезвия на множестве частот вращения, и причем процессор выполнен с возможностью уменьшения частоты вращения режущего лезвия при приближении режущего лезвия к заданной анатомической структуре.
[0013] В дополнительных вариантах осуществления анатомические структуры в 3D-изображении включают в себя различные рентгеноконтрастности ткани, и причем процессор выполнен с возможностью определения 3D-местоположения заданной структуры путем обнаружения различных рентгеноконтрастностей в 3D-изображении, сегментирования 3D-изображения на основании определенных различных рентгеноконтрастностей на множество участков и определения соответствующих 3D-местоположений этих участков. В одном варианте осуществления процессор выполнен с возможностью формулирования идентификации данного участка из множества участков, и причем активирующий сигнал включает в себя эту идентификацию.
[0014] В соответствии с одним вариантом осуществления настоящего изобретения также обеспечивается способ, включающий в себя этапы, на которых получают от системы визуализации трехмерное (3D) изображение полости тела, включающего в себя одну или более анатомических структур, определяют по 3D-изображению 3D-местоположения соответствующих структур для каждой из одной или более анатомических структур, получают от медицинского зонда, имеющего вводимую трубку и датчик положения, закрепленный в заданном расположении относительно вводимой трубки, сигнал положения, указывающий 3D-местоположение режущего лезвия, установленного на дистальном конце вводимой трубки и введенного в полость тела, определяют с помощью процессора на основании 3D-местоположения лезвия и 3D-местоположений соответствующих структур близость режущего лезвия к данной анатомической структуре, передают на устройство предупреждение, установленное на ручке, прикрепленной к проксимальному концу вводимой трубки и выполненное с возможностью генерирования различных чувствительных выходных сигналов в ответ на получение различных активирующих сигналов, данный активирующий сигнал в ответ на определенную близость к данной анатомической структуре, получают с помощью устройства предупреждения данный активирующий сигнал и генерируют с помощью устройства предупреждения данный чувствительный выходной сигнал в ответ на полученный активирующий сигнал.
[0015] В соответствии с одним вариантом осуществления настоящего изобретения дополнительно обеспечивается компьютерный программный продукт, используемый в сочетании с медицинским зондом, имеющим вводимую трубку и датчик положения, закрепленный в заданном расположении относительно вводимой трубки, причем продукт включает в себя энергонезависимый машиночитаемый носитель, в котором хранятся программные команды, которые предписывают компьютеру при их считывании получать от системы визуализации трехмерное (3D) изображение полости тела, включающее в себя одну или более анатомических структур, определять по 3D-изображению 3D-местоположения соответствующих структур для каждой из одной или более анатомических структур, получать от датчика положения сигнал положения, указывающий 3D-местоположение режущего лезвия, установленного на дистальном конце вводимой трубки и введенного в полость тела, определять на основании 3D-местоположения лезвия и 3D-местоположений соответствующих структур близость режущего лезвия к данной анатомической структуре и передавать на устройство предупреждения, установленное на ручке, прикрепленной к проксимальному концу вводимой трубки, и выполненное с возможностью генерирования множества чувствительных выходных сигналов в ответ на получение соответствующего множества активирующих сигналов, данный активирующий сигнал в ответ на определенную близость к данной анатомической структуре.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0016] Настоящее изобретение описано в данном документе на основе примера осуществления со ссылкой на прилагаемые графические материалы, где:
[0017] на фигурах 1A и 1B, которые вместе относятся к фигуре 1, представлены схематичные графические изображения медицинской системы, содержащей медицинский зонд, имеющий предупреждающий модуль на основе местоположения в соответствии с вариантом осуществления настоящего изобретения;
[0018] на фигуре 2 представлена блок-схема, на которой схематически проиллюстрирован способ генерирования медицинским зондом чувствительного выходного сигнала, когда режущее лезвие на медицинском зонде находится в близости к чувствительной области у пациента в соответствии с вариантом осуществления настоящего изобретения;
[0019] на фигуре 3 представлен схематический подробный вид, на котором показан дистальный конец медицинского зонда, введенный в полость пазухи пациента, в соответствии с вариантом осуществления настоящего изобретения; и
[0020] на фигуре 4 представлено схематичное графическое изображение, на котором показан фрагмент изображения трехмерной компьютерной томографии (КТ) пациента, сгенерированного в ответ на получение данных изображения со сканера КТ в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
ОБЩЕЕ ОПИСАНИЕ
[0021] Инвазивные медицинские зонды, такие как дебридеры, могут содержать режущие концы (например, лезвие), которые во время медицинской процедуры могут плотно приближаться к чувствительным областям в организме пациента. Примеры чувствительных областей включают в себя глаз, оптический нерв, сонную артерию и мозг. Поэтому важно уведомлять оперирующего врача о моменте приближения режущего конца медицинского зонда к данной чувствительной области. Одним из способов отслеживания режущего конца является использование флюороскопии. Однако применение флюороскопии следует сводить к минимуму из-за ее ионизирующего свойства.
[0022] В вариантах осуществления настоящего изобретения аппарат включает в себя медицинский зонд (например, дебридер), который можно использовать для проведения инвазивных медицинских процедур на пациенте. Медицинский зонд содержит вводимую трубку, содержащую проксимальный конец и дистальный конец, для введения в полость тела, имеющую одну или более анатомических структур. Медицинский зонд также содержит режущее лезвие, установленное на дистальном конце вводимой трубки, и ручку, прикрепленную к проксимальному концу. Медицинский зонд дополнительно содержит на устройстве предупреждения, которое генерирует различные чувствительные выходные сигналы в ответ на получение различных активирующих сигналов, и датчик положения, закрепленный в заданном расположении относительно вводимой трубки.
[0023] Аппарат также содержит процессор, выполненный с возможностью получения от системы визуализации трехмерного (3D) изображения полости тела и определения по 3D-изображению соответствующих 3D-местоположений для каждой из одной или более анатомических структур. Процессор дополнительно выполнен с возможностью получения от датчика положения сигнала положения, указывающего 3D-местоположение режущего лезвия внутри полости тела, и определения на основании 3D-местоположения лезвия и 3D-местоположений соответствующих структур близости режущего лезвия к данной анатомической структуре.
[0024] Процессор выполнен с возможностью передачи после определения того, что режущее лезвие находится в близости к данной анатомической структуре, данного активирующего сигнала на устройство предупреждения в ответ на определенную близость к данной анатомической структуре, а устройство предупреждения выполнено с возможностью генерирования данного чувствительного выходного сигнала при получении данного активирующего сигнала. Данный чувствительный выходной сигнал может содержать визуальное и/или звуковое уведомление.
[0025] В описанных в настоящем документе вариантах осуществления устройство предупреждения может генерировать различные чувствительные выходные сигналы для различных расстояний между режущим лезвием и различными анатомическими структурами. Поэтому медицинские системы, реализующие варианты осуществления настоящего изобретения, могут помогать в предотвращении случайного повреждения чувствительных анатомических структур (например, артерий и нервов) при проведении инвазивных медицинских процедур.
ОПИСАНИЕ СИСТЕМЫ
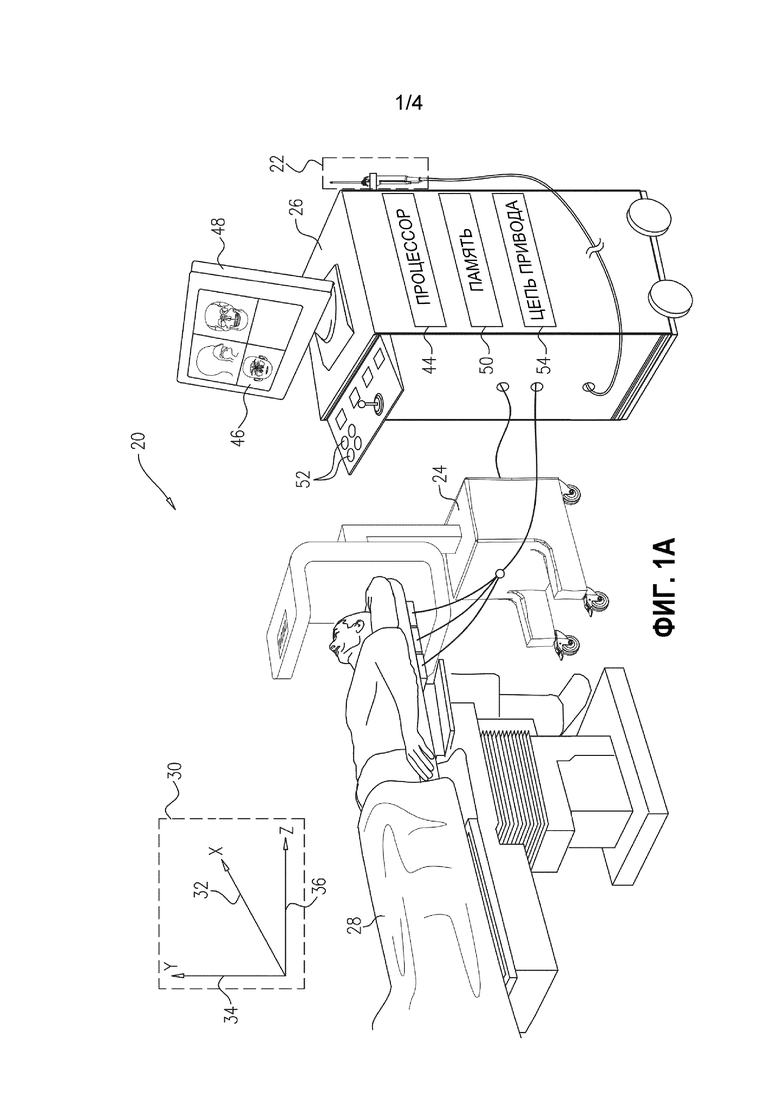
[0026] В соответствии с одним вариантом осуществления настоящего изобретения фигуры 1A и 1B, которые вместе относятся к фигуре 1, представляют собой схематичные графические изображения медицинской системы 20, содержащей медицинский зонд 22, выполненный с возможностью генерирования предупреждающих сигналов на основании местоположения. В примере, показанном на фигуре 1A, медицинская система 20 содержит медицинскую систему визуализации, содержащую сканер 24 компьютерной томографии (КТ), пульт 26 управления и медицинский зонд 22. В вариантах осуществления, описанных в настоящем документе, предполагается, что медицинский зонд 22 используют для диагностической или терапевтической обработки, такой как малоинвазивная хирургия пазух на основе катетера на пациенте 28. В альтернативном варианте осуществления медицинский зонд 22 могут использовать mutatis mutandis для других терапевтических и/или диагностических целей.
[0027] Перед выполнением инвазивной медицинской процедуры на пациенте 28 компьютерный томограф 24 генерирует электрические сигналы, содержащие данные изображения для полости (например, носа или околоносовой пазухи) пациента, и передает сгенерированные данные изображения на пульт 26 управления. Компьютерный томограф 24 генерирует данные изображения в системе 30 координат изображения, содержащей ось Х 32, ось Y 34 и ось Z 36.
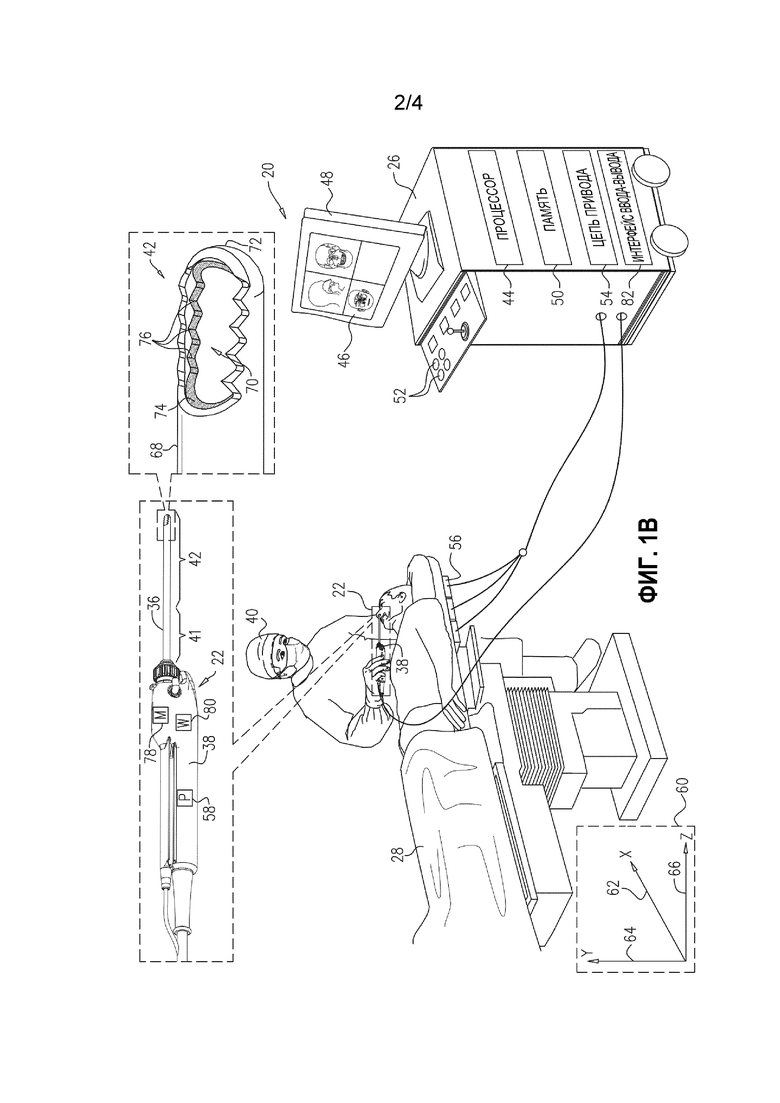
[0028] Как показано на фигуре 1B, медицинский зонд 22 содержит ручку 38, выполненную с возможностью захвата и манипулирования пользователем 40 для введения дистального конца 42 медицинского зонда в полость, такую как носовая полость или околоносовая пазуха, пациента 28. В конфигурации, показанной на фигуре 1, пульт 26 управления содержит процессор 44, который преобразует полученные данные изображения в изображение 46 и представляет изображение на дисплее 48 в качестве информации о медицинской процедуре.
[0029] В качестве примера предполагается, что дисплей 48 содержит плоскопанельный дисплей, такой как жидкокристаллический дисплей, светодиодный дисплей, органический светодиодный дисплей или плазменный дисплей. При этом для реализации вариантов осуществления настоящего изобретения также можно применять другие дисплейные устройства. В некоторых вариантах осуществления дисплей 48 может содержать сенсорный экран, который может быть выполнен с возможностью приема входных сигналов от пользователя 40 в дополнение к представлению изображения 46.
[0030] На основании сигналов, полученных от медицинского зонда 22 и других компонентов медицинской системы 20, панель 26 управления активирует дисплей 48 для обновления изображения 46 для представления текущего расположения дистального конца 42 в теле пациента, а также информации о состоянии и инструкций касательно текущей медицинской процедуры. Процессор 44 хранит данные, представляющие изображение 46, в памяти 50. В некоторых вариантах осуществления пользователь 40 может управлять изображением 46, используя одно или более устройств 52 ввода данных. В вариантах осуществления, в которых дисплей 48 содержит сенсорный экран, пользователь 40 может управлять изображением 46 через сенсорный экран.
[0031] Процессор 44, как правило, содержит компьютер общего назначения с цепями фронтального конца и интерфейса, подходящими для приема сигналов от медицинского зонда 22 и контроля других компонентов панели 26 управления. Для выполнения описанных в настоящем документе функций на процессоре 44 может быть установлено программное обеспечение. Программное обеспечение может быть загружено в пульт 26 управления в электронной форме, например по сети, или оно может быть предоставлено на энергонезависимом материальном носителе, таком как оптический, магнитный или электронный носитель информации. В альтернативном варианте осуществления некоторые или все функции процессора 44 могут осуществляться специализированными или программируемыми компонентами цифровых аппаратных средств.
[0032] В описанных в настоящем документе вариантах осуществления в медицинской системе 20 используют определение положения на основании магнитного поля для определения координат расположения (то есть местоположения и ориентации) дистального конца 42 медицинского зонда 22 внутри тела пациента 28. Для реализации определения положения на основании магнитного поля пульт 26 управления содержит цепь 54 привода, которая приводит в действие генераторы 56 поля для создания магнитных полей внутри тела пациента 26. Как правило, генераторы 56 поля содержат три перпендикулярно ориентированные катушки, которые размещают ниже туловища пациента в известных местоположениях вне тела пациента 28. Эти катушки генерируют магнитные поля в заданном рабочем пространстве, которое охватывает полость, такую как околоносовая пазуха. Датчик 58 магнитного поля (как правило, трехосная катушка, в настоящем документе также относящаяся к датчику 58 положения), закрепленный внутри ручки 38 медицинского зонда 22, генерирует электрические сигналы в ответ на магнитные поля от катушек генератора, таким образом позволяя процессору 44 определять положение дистального конца 42 внутри полости в теле пациента 28, так как смещение между датчиком 58 и дистальным концом 42 известно.
[0033] Положение датчика 58 и, таким образом, дистального конца 42 определяют по отношению к системе 60 координат, также называемой в настоящем документе системой 60 координат датчика, определяемой генераторами 56 поля. Для нахождения соответствия между сигналами, генерируемыми в датчике 58, и положением датчика поле от генераторов 56 калибруют перед расположением пациента 28 в поле. Калибровка, как правило, содержит получение процессором 44 калибровочных сигналов от датчика калибровки, такого как датчик 28, при этом датчик калибровки расположен в известных измеренных местоположениях относительно генераторов 56. Впоследствии процессор 44 способен формировать соответствие между известными местоположениями и калибровочными сигналами и использовать это соответствие для определения местоположения датчика 58 в системе 60 по сигналам, генерируемым датчиком.
[0034] Дополнительные способы отслеживания положения посредством магнитных полей описаны, например, в патентах США 5,391,199, 6,690,963, 5,443,489, 6,788,967, 5,558,091, 6,172,499 и 6,177,792, содержание которых раскрыто в настоящем документе путем ссылки. Сигналы, генерируемые датчиком 58 магнитного поля, указывают текущее местоположение дистального конца 42 в системе 60 координат датчика, содержащей ось Х 62, ось Y 64 и ось Z 66. В примере, показанном на фигуре 1, ось Х 62 по существу соответствует оси Х 32, ось Y 64 по существу соответствует оси Y 34, и ось Z 66 по существу соответствует оси Z 36.
[0035] В примере, показанном на фигуре 1B, медицинский зонд содержит наружную трубку 68 (в настоящем документе также называемую вводимой трубкой), имеющую проксимальный конец 41, прикрепленный к ручке 38, и дистальный конец 42, содержащий отверстие 70 радиального режущего окна в близости к дистальному наконечнику 72 наружной трубки. Медицинский зонд 22 также содержит внутреннюю трубку 74, которая расположена внутри наружной трубки 68 и содержит режущее лезвие 76 (также известное как режущий конец, так как оно расположено на дистальном конце 42). В действии, когда режущее лезвие 76 проходит через отверстие 70 радиального режущего окна, режущее лезвие может удалять любую биологическую ткань, выступающую вовнутрь режущего окна. Ручка 38 также содержит двигатель 78, который вращает внутреннюю трубку 74 внутри наружной трубки 68, таким образом позволяя режущему лезвию 76 проходить через отверстие 70 радиального режущего окна.
[0036] В конфигурации, показанной на фигуре 1B, датчик 58 положения прикреплен к ручке 38 в заданном расположении относительно вводимой трубки 68 и режущего лезвия 76. В альтернативном варианте осуществления датчик 58 положения могут прикреплять к вводимой трубке 68 в заданном расположении относительно режущего лезвия 76.
[0037] В дополнение к датчику 58 положения и двигателю 78 ручка 38 также содержит устройство 80 предупреждения и интерфейс 82 передачи данных ввода/вывода (I/O), который позволяет пульту управления передавать сигналы от и/или передавать сигналы к цепи 54 привода, датчику 58 положения, двигателю 78 и устройству 80 предупреждения. Цепь 54 привода, датчик 58 положения, двигатель 78 и устройство 80 предупреждения связаны с интерфейсом 82 ввода-вывода в пульте 26 управления посредством проводных соединений (не показаны) и/или беспроводных соединений, таким образом позволяя пульту управления (а) получать сигналы положения от датчика 58 положения, (b) контролировать скорость вращения двигателя 78 и (с) передавать активирующий сигнал на устройство 80 предупреждения.
[0038] Устройство 80 предупреждения генерирует чувствительные выходные сигналы и содержит одно или более подсвечивающих устройств (например, светодиодов), которые могут передавать визуальный чувствительный выходной сигнал, и/или устройство генерирования звука (например, динамик), которое может генерировать слышимый чувствительный выходной сигнал. В вариантах осуществления настоящего изобретения устройство 80 предупреждения может передавать различные типы чувствительных выходных сигналов в ответ на различные активирующие сигналы. В вариантах осуществления, в которых устройство 80 предупреждения содержит одно или более подсвечивающих устройств, различные типы чувствительных выходных сигналов могут включать в себя различные цвета (например, зеленый, желтый и синий), различную интенсивность, различную продолжительность и различные скорости повторения (то есть мигание). В вариантах осуществления, в которых устройство 80 предупреждения содержит динамик, различные типы чувствительных выходных сигналов могут включать в себя звуки, имеющие различные тоны/частоты, различные уровни громкости, различную продолжительность, различные скорости повторения (то есть пиканье) и синтезированные слова (например, «предупреждение»). В некоторых вариантах осуществления устройство 80 предупреждения может быть разъемно прикреплено (то есть может быть выполнено с возможностью отсоединения) к ручке 38.
ГЕНЕРИРОВАНИЕ ПРЕДУПРЕЖДЕНИЯ ЧУВСТВИТЕЛЬНОЙ ОБЛАСТИ
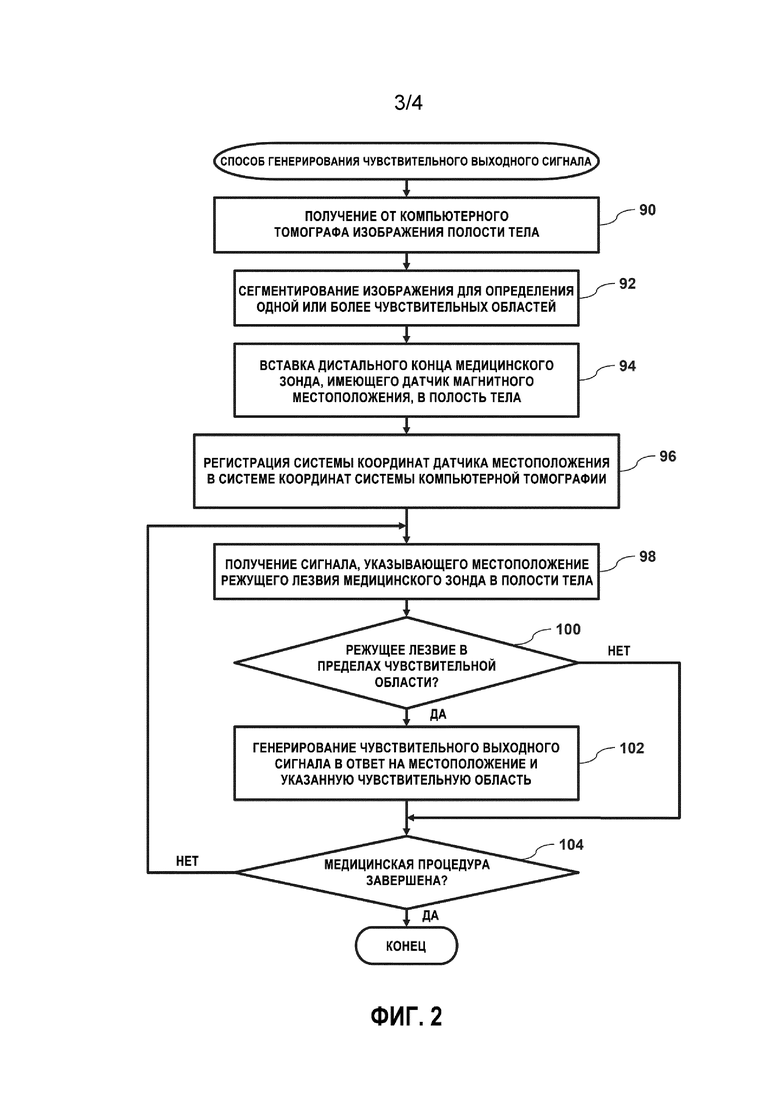
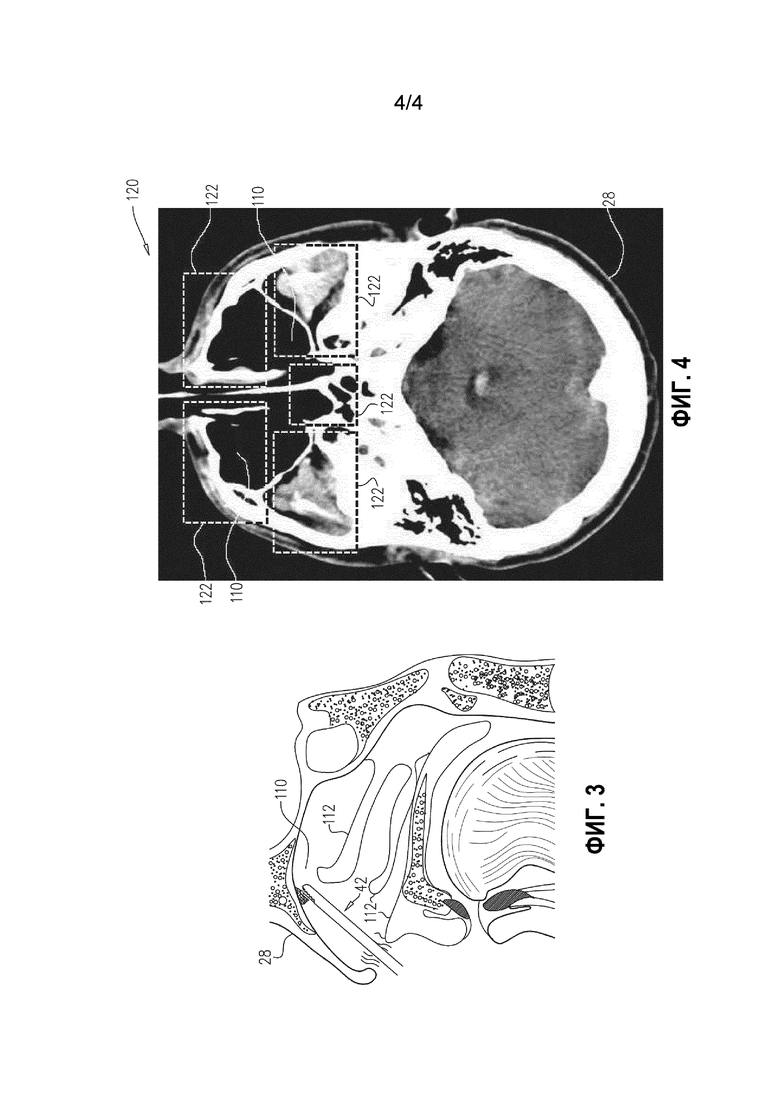
[0039] Фигура 2 представляет собой блок-схему, на которой схематически проиллюстрирован способ генерирования медицинским зондом 22 чувствительного выходного сигнала, когда режущее лезвие 76 находится в близости к чувствительной области в теле пациента 28, фигура 3 представляет собой схематический подробный вид, на котором показан дистальный конец 42, введенный в полость 110 пазухи пациента, и фигура 4 представляет собой схематичное графическое изображение, на котором показан фрагмент 120 изображения трехмерной компьютерной томографии, сгенерированного процессором 44 в ответ на получение данных изображения с компьютерного томографа 23 в соответствии с вариантами осуществления настоящего изобретения. Как показано на фигуре 3, пациент 28 имеет множество анатомических структур 112, и в вариантах осуществления настоящего изобретения чувствительная область содержит данную анатомическую структуру 112, такую как глаз, нерв (например, зрительный нерв) или артерию (например, сонную артерию).
[0040] На стадии 90 получения процессор 44 получает трехмерные (3D) данные изображения от компьютерного томографа 24, сохраняет данные изображения в память 50 и генерирует на основании полученных данных изображения трехмерное изображение. Несмотря на то, что в описанных в настоящем документе вариантах осуществления описано получение 3D-данных изображения от компьютерного томографа 24, получение 3D-данных изображения от любого другого типа медицинской системы визуализации считают находящимся в пределах сущности и объема настоящего изобретения.
[0041] На стадии 92 сегментации процессор 44 сегментирует полученное 3D-изображение на множество участков 122 и определяет соответствующие 3D-местоположения участков. В действии каждый участок 122 может содержать по меньшей мере одну анатомическую структуру 112. В альтернативном варианте осуществления процессор 44 может представлять фрагмент 120 изображения в качестве изображения 46 на дисплее 48, и пользователь 40 может использовать устройства 52 ввода, чтобы вручную переносить очертания фрагмента изображения (например, 3D-изображения) на участки 122. В некоторых вариантах осуществления данная чувствительная область может содержать один или более участков 122.
[0042] 3D-изображение пациента 28, формируемое сканером 24 компьютерной томографии, обычно содержит различные серые шкалы для представления различных рентгеноконтрастностей ткани (например, для костной ткани, нервной ткани и ткани головного мозга). Для автоматической сегментации полученного 3D-изображения на множество участков 122 процессор 44 может сначала определять распознаваемый признак данной анатомической структуры 112 в теле пациента 28, а затем анализировать рентгеноконтрастности ткани в близости к идентифицируемому признаку. Например, для сегментации глаза и зрительного нерва в полученном 3D-изображении процессор 44 может:
• Идентифицировать глазницу по ее форме и первой рентгеноконтрастности, указывающей на кость.
• Идентифицировать глаз как сферическую форму в глазнице, имеющую вторую рентгеноконтрастность, указывающую на ткань склеры.
• Идентифицировать зрительный нерв как ткань, проходящую от глаза, имеющую третью рентгеноконтрастность, указывающую на нервную ткань.
• Сегментировать первый участок, содержащий глазницу и глаз, и второй участок, содержащий зрительный нерв.
[0043] В альтернативном варианте осуществления или дополнительно пользователь 40 может вручную сегментировать полученное 3D-изображение путем:
• Идентификации распознаваемого признака данной анатомической структуры 112 (например, глазницы) в данном фрагменте 120 3D-изображения, представленного на изображении 46.
• Идентификации зрительного нерва путем определения в данном фрагменте ткани, имеющей рентгеноконтрастность, указывающую на нервную ткань, которая проходит от глазницы.
• Манипуляции устройством (-ами) 52 ввода для очерчивания и выбора (то есть на изображении 46) данного участка 122, который включает в себя идентифицируемую ткань (то есть зрительный нерв).
[0044] Стадии 90 и 92 обычно выполняют перед проведением медицинской процедуры на теле пациента 28. Чтобы начать медицинскую процедуру, пользователь 40 манипулирует ручкой 38 таким образом, что на стадии 94 введения дистальный конец 42 входит в полость тела пациента 28.
[0045] На стадии 96 регистрации процессор 44 регистрирует систему 30 координат изображения в системе 60 координат датчика и на стадии 98 получения процессор получает сигналы от датчика 58 магнитного поля, указывая местоположение режущего лезвия 76 в полости тела. В некоторых вариантах осуществления процессор 44 может вычислять на основании полученных сигналов местоположение датчика 58 положения и добавлять вектор (определяемый по ранее выполненной калибровке) к вычисляемому местоположению для определения местоположения режущего лезвия 76. В некоторых вариантах осуществления процессор 44 также может определять ориентацию режущего лезвия 76.
[0046] Для регистрации систем координат процессор 44 может представлять изображение 46 на дисплее 48, а пользователь 40 может манипулировать ручкой 38 таким образом, чтобы дистальный наконечник 72 взаимодействовал с идентифицируемым признаком пациента 28 (например, коронарной пазухой устья, также известной как отверстие коронарной пазухи или просто "OS"), который присутствует на изображении и имеет местоположение изображения в системе 30 координат изображения. Когда дистальный наконечник 72 взаимодействует с идентифицируемым признаком (например, данной анатомической структурой) на изображении 46, пользователь 40 может выбирать данный идентифицируемый признак (например, манипулируя данным устройством ввода 52, помещая на дисплее курсор над данным идентифицируемым признаком). После получения сигнала регистрации процессор 44 может определять на основании сигналов, полученных от датчика 58 положения, магнитное месторасположение дистального наконечника в системе 60 координат датчика. Процессор 44 может вычислять на основании магнитного местоположения и местоположения изображения вектор регистрации, который можно использовать для регистрации системы 30 координат изображения в системе 60 координат датчика.
[0047] Как описано ниже в настоящем документе, процессор 44 выполнен с возможностью передачи различных активирующих сигналов на устройство 80 предупреждения, а устройство предупреждения выполнено с возможностью генерирования различных типов визуальных и/или звуковых чувствительных выходных сигналов в ответ на передаваемый активирующий сигнал. На этапе 100 первого сравнения, если местоположение режущего лезвия 76 находится в пределах данного чувствительного участка (то есть режущее лезвие находится в близости к данной анатомической структуре 112 в данном чувствительном участке), процессор 44 может передавать данный активирующий сигнал на устройство 80 предупреждения, и после получения данного активирующего сигнала устройство предупреждения может генерировать данный чувствительный выходной сигнал на этапе 102 генерирования.
[0048] В вариантах осуществления настоящего изобретения активирующие сигналы и чувствительные выходные сигналы зависят от данной чувствительной области и местоположения режущего лезвия 76 в пределах данной чувствительной области. Иными словами, процессор 44 может передавать различные активирующие сигналы на устройство 80 предупреждения на основании (a) данной анатомической структуры в близости к режущему лезвию 76 и (b) расстояния между режущим лезвием и данной анатомической структурой.
[0049] В одном варианте осуществления анатомические структуры содержат кровеносные сосуды и нервы, и процессор 44 может назначать высокий уровень важности артериям (например, сонной артерии), средний уровень важности нервам (например, зрительному нерву) и низкий уровень важности пустому пространству в полости тела и передавать различные активирующие сигналы на основании соответствующих уровней важности. Например, если устройство 80 предупреждения содержит светодиод (СИД), то СИД может быть выполнен с возможностью:
• Испускания красного света при получении первого активирующего сигнала, указывающего, что режущее лезвие 76 находится в близости к артерии.
• Испускания желтого света при получении активирующего сигнала среднего уровня важности, указывающего, что режущее лезвие 76 находится в близости к нерву.
• Испускания зеленного света при получении активирующего сигнала низкого уровня важности, указывающего, что режущее лезвие 76 не находится в близости к любой критической анатомической структуре 112 (например, артериям или нервам).
[0050] В другом примере устройство 80 предупреждения содержит устройство генерирования звука (то есть схему и динамик), которое может генерировать выходной аудиосигнал, содержащий синтезированную речь, которая идентифицирует данную анатомическую структуру 112 (например, «зрительный нерв») и расстояние между лезвием 76 и данной анатомической структурой (например, «пять миллиметров»). В дополнительном примере устройство 80 предупреждения может содержать дисплей (например, СИД-экран), установленный на ручке, и процессор 44 может представлять данную анатомическую структуру и расстояние на дисплее зонда (например, «мозг 5 мм»).
[0051] В некоторых вариантах осуществления устройство 80 предупреждения может быть выполнено с возможностью передачи чувствительных выходных сигналов, указывающих расстояние до данной анатомической структуры 112. Продолжая пример, в котором устройство 80 предупреждения содержит СИД, СИД может мигать быстрее, если принимаемый активирующий сигнал указывает на то, что режущее лезвие приближается к данной анатомической структуре, и мигать медленнее, если принимаемый активирующий сигнал указывает на то, что режущее лезвие отдаляется от данной анатомической структуры. Как описано выше, различные чувствительные выходные сигналы могут также содержать различные звуки.
[0052] Дополнительно или альтернативно процессор 44 может представлять данный чувствительный выходной сигнал на дисплее 48. Чтобы представлять данный чувствительный выходной сигнал на дисплее 48, процессор 44 может представлять на дисплее сообщение (например, значок, представляющий данную анатомическую структуру 112) с различными визуальными эффектами (например, цвета, интенсивность, размер или частота мигания) для указания текущего расстояния между режущим лезвием и данной анатомической структурой 112. Сообщение на дисплее 48 также может включать в себя текст, идентифицирующий данную анатомическую структуру 112, и расстояние между режущим лезвием и данной анатомической структурой 112 (например, «мозг 5 мм»).
[0053] В дополнительных вариантах осуществления процессор 44 может регулировать скорость двигателя 78 (и, следовательно, скорость вращения режущего лезвия 76) на основании расстояния между режущим лезвием и данной анатомической структурой 112. Например, процессор 44 может снижать скорость двигателя по мере приближения режущего лезвия к анатомической структуре (например, артерии или нерву, как описано выше). В некоторых вариантах осуществления процессор 44 может отключать двигатель 78, когда режущее лезвие находится слишком близко (например, 2 мм) к анатомической структуре, такой как сонная артерия или глаз. Другими словами, процессор 44 может управлять двигателем 78 таким образом, что скорость вращения двигателя непосредственно связана с расстоянием между режущим лезвием 76 и данной анатомической структурой 112 (то есть более высокие скорости при больших расстояниях и более низкие скорости при меньших расстояниях).
[0054] В заключение способ заканчивается на этапе 104 второго сравнения, если медицинская процедура завершена. Если медицинская процедура не завершена, то способ продолжается с этапа 98. Возвращаясь к этапу 100, если режущее лезвие 76 находится не в пределах данной чувствительной области, то способ продолжается с этапа 104.
[0055] Следует понимать, что описанные выше варианты осуществления приведены лишь для примера, и что настоящее изобретение не ограничено вариантами, показанными и подробно описанными в настоящем документе выше. Напротив, объем настоящего изобретения включает в себя и комбинации, и подкомбинации различных элементов, описанных в настоящем документе выше, а также их варианты и модификации, которые могут быть предложены специалистами в данной области после прочтения приведенного выше описания и которые не были описаны на предшествующем уровне техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ ВИЗУАЛИЗАЦИИ НА ДИСПЛЕЕ ИЗОБРАЖЕНИЯ ЧАСТИЧНО УПЛОЩЕННОЙ ПОВЕРХНОСТИ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ПОЛОСТИ, А ТАКЖЕ ПОСТОЯННЫЙ МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2020 |
|
RU2735068C1 |
| Способ повторного использования данных в системе обработки и отображения электрической активности сердца | 2020 |
|
RU2758749C1 |
| ЧУВСТВИТЕЛЬНЫЙ К ДАВЛЕНИЮ ЗОНД С ВЫСОКОЙ ЧУВСТВИТЕЛЬНОСТЬЮ | 2009 |
|
RU2517599C2 |
| НАПРАВЛЯЕМЫЕ УЛЬТРАЗВУКОМ БИОПСИИ В ТРЕХ ИЗМЕРЕНИЯХ | 2013 |
|
RU2629237C2 |
| ГОЛОГРАФИЧЕСКИЕ ПОЛЬЗОВАТЕЛЬСКИЕ ИНТЕРФЕЙСЫ ДЛЯ МЕДИЦИНСКИХ ПРОЦЕДУР | 2012 |
|
RU2608322C2 |
| ГИБКИЙ КАБЕЛЬ СО ВСТРОЕННЫМИ ДАТЧИКАМИ ДЛЯ ДИНАМИЧЕСКОГО ОТСЛЕЖИВАНИЯ ИНСТРУМЕНТА | 2011 |
|
RU2597136C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ УЛЬТРАЗВУКОВАЯ СИСТЕМА | 2018 |
|
RU2759235C2 |
| ЗВУКОВЫЕ РАСШИРЕНИЯ ДЛЯ МЕДИЦИНСКИХ СИСТЕМ | 2014 |
|
RU2675453C2 |
| КАЛИБРОВКА ЖЕСТКОГО ОТОЛАРИНГОЛОГИЧЕСКОГО ИНСТРУМЕНТА | 2018 |
|
RU2771799C2 |
| ТРЕХМЕРНОЕ ПРЕДСТАВЛЕНИЕ ЭЛЕКТРИЧЕСКОЙ АКТИВНОСТИ | 2020 |
|
RU2758748C1 |
Группа изобретений относится к медицине. Аппарат, включающий в себя трубку, имеющую проксимальный конец и дистальный конец, для введения в полость тела, включающую в себя анатомические структуры, и лезвие, установленное на дистальном конце. Аппарат также включает в себя ручку на проксимальном конце и включает в себя устройство, которое генерирует чувствительные выходные сигналы при получении активирующих сигналов, и датчик положения, закрепленный в заданном расположении относительно трубки. Аппарат дополнительно включает в себя процессор, выполненный с возможностью получения изображения полости, определения по изображению местоположений для каждой из структур, получения от датчика сигнала положения, указывающего местоположение лезвия в полости, определения на основании местоположения лезвия и местоположений соответствующих структур близости лезвия к данной структуре и передачи на устройство предупреждения данного активирующего сигнала в ответ на близость к данной структуре. Применение данной группы изобретений позволит плотно приближаться к чувствительным областям в организме пациента. 3 н. и 21 з.п. ф-лы, 4 ил.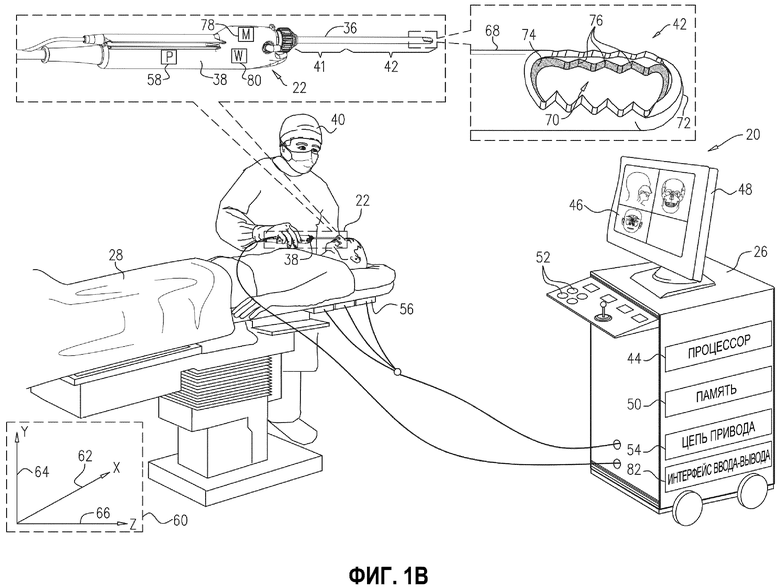
1. Медицинский аппарат для проведения инвазивных процедур, содержащий:
инвазивный медицинский зонд, снабженный:
вводимой трубкой, имеющей проксимальный конец и дистальный конец, для введения в полость тела, содержащую одну или более анатомических структур;
режущим лезвием, установленным на дистальном конце вводимой трубки;
ручкой, прикрепленной к проксимальному концу и содержащей устройство предупреждения, которое генерирует различные чувствительные выходные сигналы в ответ на получение различных активирующих сигналов; и
датчиком положения, закрепленным в заданном расположении относительно вводимой трубки; и
процессор, выполненный с возможностью:
получения от системы визуализации трехмерного (3D) изображения полости тела,
определения по 3D-изображению 3D-местоположений соответствующих структур для каждой из одной или более анатомических структур на основе сигналов, полученных от датчика положения, для регистрации системы координат 3D-изображения в системе координат датчика,
получения от датчика положения сигнала положения, указывающего 3D-местоположение режущего лезвия внутри полости тела,
определения на основании 3D-местоположения лезвия и 3D-местоположений соответствующих структур близости режущего лезвия к данной анатомической структуре,и
передачи данного активирующего сигнала на устройство предупреждения в ответ на определенную близость к данной анатомической структуре.
2. Медицинский аппарат по п. 1, в котором устройство предупреждения выполнено с возможностью отсоединения от ручки.
3. Медицинский аппарат по п. 1, в котором устройство предупреждения содержит подсвечивающее устройство или устройство генерирования звука.
4. Медицинский аппарат по п. 3, в котором чувствительный выходной сигнал, генерируемый подсвечивающим устройством в ответ на определенную близость к данной анатомической структуре, содержит свет различных цветов, различной интенсивности или различной продолжительности.
5. Медицинский аппарат по п. 3, в котором чувствительный выходной сигнал, генерируемый устройством генерирования звука в ответ на определенную близость к данной анатомической структуре, содержит звуки, имеющие различные тоны, различные частоты, различные уровни громкости, различную продолжительность, различные скорости повторения или различные синтезированные слова.
6. Медицинский аппарат по п. 1, содержащий дисплей, в котором процессор выполнен с возможностью представления на дисплее чувствительного выходного сигнала в ответ на определенную близость к данной анатомической структуре.
7. Медицинский аппарат по п. 1, в котором датчик положения содержит трехосную катушку.
8. Медицинский аппарат по п. 1, в котором система визуализации содержит систему координат изображения, причем датчик положения содержит систему координат датчика, и при этом перед получением сигнала положения, указывающего 3D-местоположение режущего лезвия внутри полости тела, процессор выполнен с возможностью регистрации системы координат датчика в системе координат изображения.
9. Медицинский аппарат по п. 1, содержащий двигатель, установленный внутри ручки и выполненный с возможностью вращения режущего лезвия, при этом процессор выполнен с возможностью уменьшения частоты вращения режущего лезвия при приближении режущего лезвия к данной анатомической структуре.
10. Медицинский аппарат по п. 1, в котором анатомические структуры в 3D-изображении имеют различную рентгеноконтрастность ткани, и при этом процессор выполнен с возможностью определения 3D-местоположения данной структуры путем обнаружения различной рентгеноконтрастности в 3D-изображении, сегментирования 3D-изображения на основании определенной различной рентгеноконтрастности на участки и обнаружения соответствующих 3D-местоположений этих участков.
11. Медицинский аппарат по п. 11, в котором процессор выполнен с возможностью формулирования идентификации данного участка из сегментированных участков, и при этом активирующий сигнал содержит эту идентификацию.
12. Способ генерирования чувствительного выходного сигнала инвазивным медицинским зондом, имеющим вводимую трубку, датчик положения, закрепленный в заданном расположении относительно вводимой трубки, и режущее лезвие, установленное на дистальном конце вводимой трубки, включающий этапы, на которых:
получают от системы визуализации трехмерное (3D) изображение полости тела, содержащей одну или более анатомических структур;
определяют по 3D-изображению 3D-местоположения соответствующих структур для каждой из одной или более анатомических структур на основе сигналов, полученных от датчика положения, для регистрации системы координат 3D-изображения в системе координат датчика;
получают от медицинского зонда сигнал положения, указывающий 3D-местоположение режущего лезвия, введенного в полость тела;
определяют с помощью процессора на основании 3D-местоположения лезвия и 3D-местоположений соответствующих структур близость режущего лезвия к данной анатомической структуре;
передают на устройство предупреждения, установленное на ручке, прикрепленной к проксимальному концу вводимой трубки, и выполненное с возможностью генерирования различных чувствительных выходных сигналов в ответ на получение различных активирующих сигналов, данный активирующий сигнал в ответ на определенную близость к данной анатомической структуре;
получают с помощью устройства предупреждения данный активирующий сигнал и
генерируют с помощью устройства предупреждения данный чувствительный выходной сигнал в ответ на полученный активирующий сигнал.
13. Способ п. 12, в котором устройство предупреждения выполнено с возможностью отсоединения от ручки.
14. Способ по п. 12, в котором устройство предупреждения содержит подсвечивающее устройство или устройство генерирования звука.
15. Способ по п. 14, в котором чувствительный выходной сигнал, генерируемый подсвечивающим устройством в ответ на определенную близость к данной анатомической структуре, содержит свет различных цветов, различной интенсивности или различной продолжительности.
16. Способ по п. 14, в котором чувствительный выходной сигнал, генерируемый устройством генерирования звука в ответ на определенную близость к данной анатомической структуре, содержит звуки, имеющие различные тоны, различные частоты, различные уровни громкости, различную продолжительность, различные скорости повторения или различные синтезированные слова.
17. Способ по п. 12, включающий представление на дисплее чувствительного выходного сигнала в ответ на определенную близость к данной анатомической структуре.
18. Способ по п. 12, в котором датчик положения содержит трехосную катушку.
19. Способ по п. 12, в котором система визуализации содержит компьютерный томограф.
20. Способ по п. 11, в котором система визуализации содержит систему координат изображения, причем датчик положения содержит систему координат датчика, включающий регистрацию системы координат датчика в системе координат изображения перед получением сигнала положения, указывающего 3D-местоположение режущего лезвия внутри полости тела.
21. Способ по п. 12, в котором медицинский зонд содержит двигатель, установленный внутри ручки и выполненный с возможностью вращения режущего лезвия, включающий уменьшение частоты вращения режущего лезвия при приближении режущего лезвия к данной анатомической структуре.
22. Способ по п. 12, в котором анатомические структуры на 3D-изображении имеют различную рентгеноконтрастность ткани, и при этом определение 3D-местоположения данной структуры включает в себя обнаружение различной рентгеноконтрастности в 3D-изображении, сегментирование 3D-изображения на основании определенной различной рентгеноконтрастности на участки и обнаружение соответствующих 3D-местоположений этих участков.
23. Способ по п. 22, включающий формулирование идентификации данного участка из сегментированных участков, и при этом активирующий сигнал содержит эту идентификацию.
24. Машиночитаемый носитель для медицинского аппарата, содержащего инвазивный медицинский зонд, имеющий вводимую трубку, датчик положения, закрепленный в заданном расположении относительно вводимой трубки, и режущее лезвие, установленное на дистальном конце вводимой трубки, причем на машиночитаемом носителе сохранен программный продукт, который содержит программные команды, которые предписывают компьютеру при их считывании:
получать от системы визуализации трехмерное (3D) изображение полости тела, содержащей одну или более анатомических структур;
определять по 3D-изображению 3D-местоположения соответствующих структур для каждой из одной или более анатомических структур на основе сигналов, полученных от датчика положения, для регистрации системы координат 3D-изображения в системе координат датчика;
получать от датчика положения сигнал положения, указывающий 3D-местоположение режущего лезвия, введенного в полость тела;
определять на основании 3D-местоположения лезвия и 3D-местоположений соответствующих структур близость режущего лезвия к данной анатомической структуре и
передавать на устройство предупреждения, установленное на ручке, прикрепленной к проксимальному концу вводимой трубки, и выполненное с возможностью генерирования чувствительных выходных сигналов в ответ на получение соответствующих активирующих сигналов, данный активирующий сигнал в ответ на определенную близость к данной анатомической структуре.
| US 20170156799 A1, 08.06.2017 | |||
| US 20160220314 A1, 04.08.2016 | |||
| US 20160242855 A1, 25.08.2016 | |||
| ВЕНТИЛЯЦИОННО-ОЧИСТИТЕЛЬНАЯ УСТАНОВКА ДЛЯ КАБИНЫ ВОДИТЕЛЯ ТРАКТОРА ИЛИ КОМБАЙНА | 0 |
|
SU169319A1 |

