ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
[0001] Настоящее изобретение по существу относится к медицинской визуализации и, в частности, к калибровке датчика магнитного поля, прикрепленного к жесткому хирургическому инструменту.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] При выполнении множества медицинских процедур требуется размещение в организме определенных объектов, таких как датчики, трубки, катетеры, дозирующие устройства и имплантаты. Чтобы помочь врачам визуализировать объект и его окружение во время этих процедур, часто используют способы визуализации в режиме реального времени. Тем не менее, в большинстве случаев трехмерная визуализация в режиме реального времени является невозможной или нежелательной. Вместо этого часто используют системы для получения пространственных координат внутреннего объекта в режиме реального времени.
[0003] В патенте США № 8,190,389 (Kim и др.) описаны устройства и способы отслеживания местоположения медицинского устройства внутри организма человека или животного. Медицинское устройство включает в себя жесткий калибровочный корпус, имеющий принимающую канавку, первый калибровочный наконечник и второй калибровочный наконечник. Для отслеживания медицинского устройства первый калибровочный наконечник выполнен с возможностью размещения в известном положении относительно электромагнитного передатчика при получении по меньшей мере одного показания с использованием хирургической системы с визуализационным контролем, второй калибровочный наконечник выполнен с возможностью размещения в известном положении относительно электромагнитного передатчика при получении по меньшей мере одного дополнительного показания с использованием хирургической системы с визуализационным контролем, и хирургическая система с визуализационным контролем выполнена с возможностью калибрования до по существу жесткой формы медицинского устройства на основании полученных показаний.
[0004] В патенте США № 7,720,521 (Chang и др.) описаны устройства, системы и способы выполнения интервенционных и хирургических вмешательств под визуализационным контролем. Система включает в себя рабочее устройство, которое выполнено с возможностью введения в организм пациента и содержит один датчик, принимающий сигналы по меньшей мере от трех передатчиков. Впоследствии компьютер может анализировать принятые сигналы для вычисления (например, при помощи триангуляции) трехмерного положения датчика внутри организма.
[0005] В патенте США № 7,876,942 (Gilboa и др.) описаны система и способ оптического измерения положения жесткого или полужесткого инструмента и его наведения на цель. Система включает в себя камеру, прикрепленную к инструменту, и систему обработки, которая обрабатывает изображения с камеры для определения местоположения инструмента. В некоторых вариантах осуществления система может помогать пользователю наводить инструмент на цель путем оптического определения опорных контрольных точек, определенных на внешней поверхности организма, получения плоскости, содержащей цель, и представления пользователю местоположения наконечника инструмента и цели на плоскости.
[0006] Документы, включенные в настоящую заявку на патент путем ссылки, следует считать неотъемлемой частью заявки за исключением того, что, если определение терминов в этих включенных документах противоречит определениям, сделанным явным или неявным образом в настоящем описании, следует учитывать только определения настоящего описания.
[0007] Вышеприведенное описание представлено в качестве общего обзора уровня техники в данной области, и его не следует воспринимать, как признание того, что любая содержащаяся в нем информация составляет предшествующий уровень техники, противопоставляемый настоящей заявке на патент.
ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0008] В соответствии с вариантом осуществления настоящего изобретения обеспечен аппарат, включающий в себя генератор магнитного поля, первый датчик магнитного поля, калибровочное устройство и блок управления. Первый датчик магнитного поля предназначен для крепления к проксимальному концу жесткого хирургического инструмента, предназначенного для введения в живой организм, а калибровочное устройство включает в себя второй датчик магнитного поля и датчик приближения, причем первый и второй датчики поля генерируют соответствующие сигналы местоположения, реагирующие на магнитное поле, создаваемое генератором магнитного поля и проходящее через датчики. Датчик приближения генерирует сигнал приближения, указывающий на контакт с калибровочным устройством. Блок управления принимает сигналы от всех датчиков, определяет соответствующие координаты местоположения и ориентации датчиков магнитного поля на основании сигналов, вычисляет правило преобразования координат первого датчика магнитного поля и дистального конца инструмента, который приводят в контакт с калибровочным устройством, и затем применяет правило преобразования вместе с координатами первого датчика магнитного поля при обеспечении визуальной индикации местоположения дистального конца инструмента внутри организма.
[0009] В некоторых вариантах осуществления жесткий хирургический инструмент включает в себя жесткий эндоскоп. В дополнительных вариантах осуществления датчик приближения включает в себя индикатор контакта. В еще дополнительных вариантах осуществления датчик приближения выполнен с возможностью выбора из группы, состоящей из датчика усилия, оптического датчика и электрического датчика.
[0010] В одном варианте осуществления первый датчик магнитного поля выполнен с возможностью разъемного прикрепления к проксимальному концу жесткого хирургического инструмента. В другом варианте осуществления калибровочное устройство выполнено с возможностью размещения на контрольном объекте. В дополнительных вариантах осуществления контрольный объект включает в себя поверхность живого организма.
[0011] В некоторых вариантах осуществления аппарат включает в себя дисплей, выполненный с возможностью представления визуальной индикации местоположения дистального конца инструмента внутри организма. В дополнительных вариантах осуществления аппарат включает в себя запоминающее устройство, при этом процессор выполнен с возможностью сохранения в запоминающем устройстве вычисленного правила преобразования и считывания с запоминающего устройства правила преобразования. В еще дополнительных вариантах осуществления правило преобразования включает в себя ориентацию и расстояние между местоположением первого датчика магнитного поля и местоположением дистального конца.
[0012] Кроме того, в соответствии с вариантом осуществления настоящего изобретения обеспечен способ, включающий в себя прием от первого датчика магнитного поля, прикрепленного к проксимальному концу жесткого хирургического инструмента, сигналов первого местоположения, реагирующих на магнитное поле, создаваемое генератором магнитного поля и проходящее через первый датчик магнитного поля, прием от второго датчика магнитного в калибровочном устройстве сигналов второго местоположения, реагирующих на магнитное поле, создаваемое генератором магнитного поля и проходящее через второй датчик магнитного поля, прием от датчика приближения в калибровочном устройстве сигнала приближения, указывающего на контакт с калибровочным устройством, определение с помощью процессора соответствующих координат местоположения и ориентации датчиков магнитного поля на основании сигналов, вычисление правила преобразования координат первого датчика магнитного поля и дистального конца инструмента, приводимого в контакт с калибровочным устройством, и последующее применение правила преобразования вместе с координатами первого датчика магнитного поля при обеспечении визуальной индикации местоположения дистального конца инструмента, введенного в живой организм.
[0013] В соответствии с вариантом осуществления настоящего изобретения дополнительно обеспечен компьютерный программный продукт, используемый совместно с жестким хирургическим инструментом, имеющим первый датчик магнитного поля, прикрепленный к проксимальному концу жесткого хирургического инструмента, при этом продукт включает в себя энергонезависимый машиночитаемый носитель, на котором хранятся программные команды, при этом команды при их считывании компьютером инициируют прием компьютером от первого датчика магнитного поля сигналов первого местоположения, реагирующих на магнитное поле, создаваемое генератором магнитного поля и проходящее через первый датчик магнитного поля, прием от второго датчика магнитного в калибровочном устройстве сигналов второго местоположения, реагирующих на магнитное поле, создаваемое генератором магнитного поля и проходящее через второй датчик магнитного поля, прием от датчика приближения в калибровочном устройстве сигнала приближения, указывающего на контакт с калибровочным устройством, определение соответствующих координат местоположения и ориентации датчиков магнитного поля на основании сигналов, вычисление правила преобразования координат первого датчика магнитного поля и дистального конца инструмента, приводимого в контакт с калибровочным устройством, и последующее применение правила преобразования вместе с координатами первого датчика магнитного поля при обеспечении визуальной индикации местоположения дистального конца инструмента, введенного в живой организм.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0014] Настоящее изобретение описано в данном документе на основе примера осуществления со ссылкой на прилагаемые графические материалы, где:
[0015] на Фиг. 1 представлено схематическое наглядное изображение медицинской системы, содержащей жесткий хирургический инструмент, имеющий разъемно прикрепленный датчик магнитного поля, в соответствии с вариантом осуществления настоящего изобретения;
[0016] на Фиг. 2 представлена блок-схема, которая схематично иллюстрирует способ вычисления калибровочного вектора для жесткого хирургического инструмента, в соответствии с вариантом осуществления настоящего изобретения;
[0017] на Фиг. 3 представлена блок-схема, которая схематично иллюстрирует способ использования калибровочного вектора для определения местоположения дистального конца жесткого хирургического инструмента, введенного в полость организма пациента, в соответствии с вариантом осуществления настоящего изобретения;
[0018] на Фиг. 4 представлено схематическое наглядное изображение использования медицинской системы для выполнения процедуры в полости организма пациента в соответствии с вариантом осуществления настоящего изобретения; и
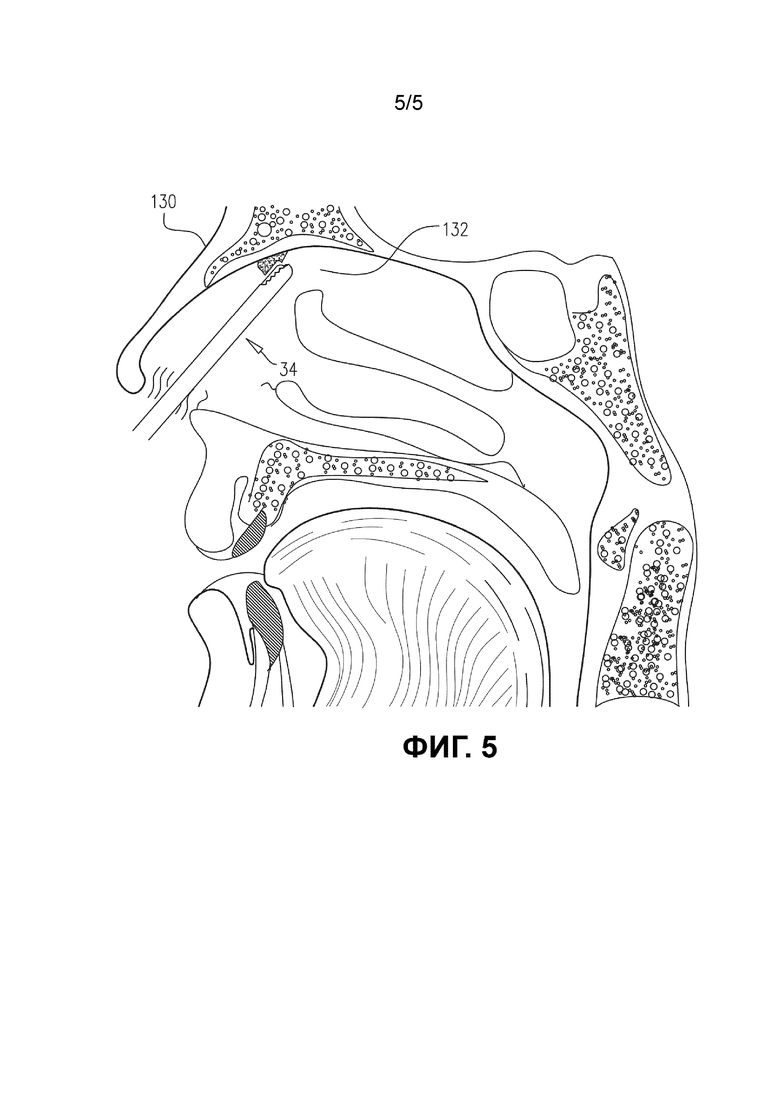
[0019] на Фиг. 5 представлено схематическое наглядное изображение дистального конца жесткого хирургического инструмента, введенного в полость организма пациента, в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0020] Во время отоларингологической процедуры с использованием жесткого хирургического инструмента, такого как жесткий эндоскоп, важно следить за дистальным концом инструмента, который может быть недоступен для прямого обзора во время процедуры. Одним из способов выполнения такого слежения является внедрение датчика магнитного поля в дистальный конец инструмента. Тем не менее существует множество инструментов, которые не имеют таких датчиков на дистальных концах, и при этом модернизация такого датчика является непрактичной.
[0021] В вариантах осуществления настоящего изобретения обеспечены системы и способы калибровки датчика магнитного поля, который выполнен с возможностью разъемного прикрепления к жесткому хирургическому инструменту. Как описано ниже в настоящем документе, система включает в себя генератор магнитного поля, первый датчик магнитного поля, калибровочное устройство и блок управления, Первый датчик магнитного поля предназначен для крепления к проксимальному концу жесткого хирургического инструмента, выполненного с возможностью введения в живой организм, а калибровочное устройство включает в себя второй датчик магнитного поля и датчик приближения, причем первый и второй датчики поля генерируют соответствующие сигналы местоположения, реагирующие на магнитное поле, создаваемое генератором магнитного поля и проходящее через датчики. Датчик приближения генерирует сигнал приближения, указывающий на контакт с калибровочным устройством.
[0022] В вариантах осуществления, описанных в настоящем документе, блок управления принимает сигналы от всех датчиков, определяет соответствующие координаты местоположения и ориентации датчиков магнитного поля на основании сигналов, вычисляет правило преобразования координат первого датчика магнитного поля и дистального конца инструмента, который приводят в контакт с калибровочным устройством, и затем применяет правило преобразования вместе с координатами первого датчика магнитного поля при обеспечении визуальной индикации местоположения дистального конца инструмента внутри организма.
ОПИСАНИЕ СИСТЕМЫ
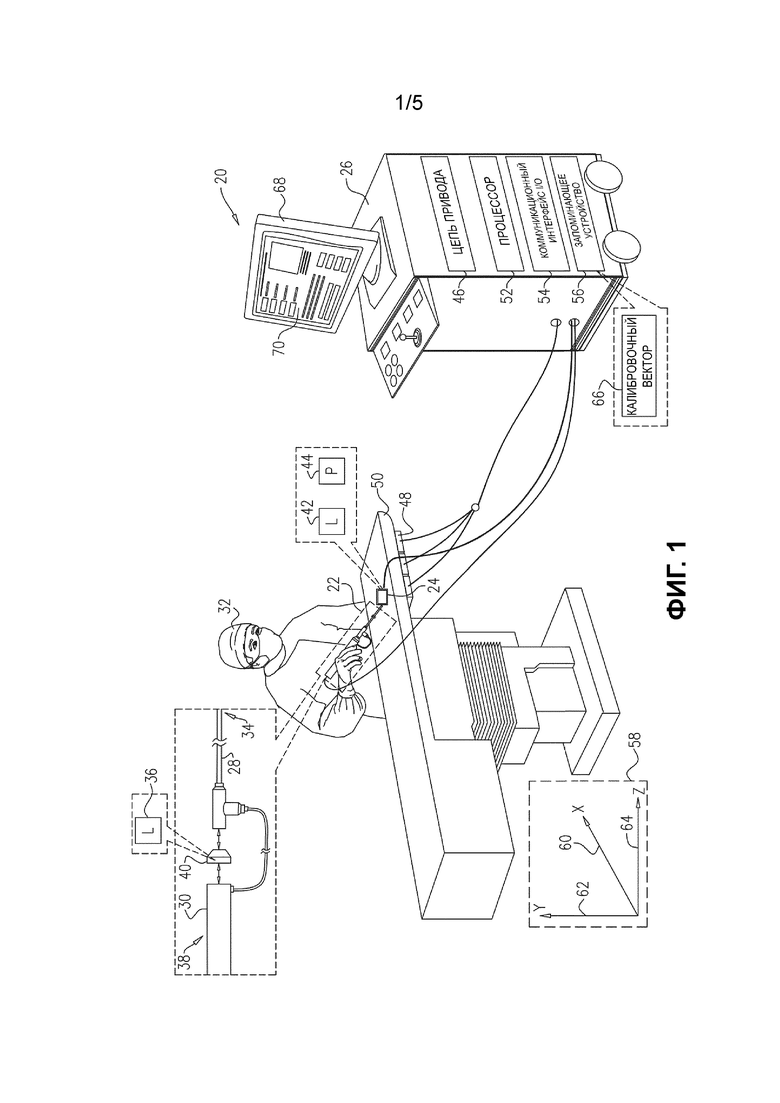
[0023] На Фиг. 1 представлено схематичное наглядное изображение медицинской системы 20, содержащей жесткий хирургический инструмент 22, калибровочное устройство 24 и пульт 26 управления, в соответствии с вариантом осуществления настоящего изобретения. В вариантах осуществления, описанных в настоящем документе, предполагается, что жесткий хирургический инструмент 22 используют для диагностического или терапевтического лечения, такого как малоинвазивная хирургия пазух пациента (не показан) на основе катетера. В альтернативном варианте осуществления жесткий хирургический инструмент 22 могут использовать mutatis mutandis для других терапевтических и/или диагностических целей.
[0024] Жесткий хирургический инструмент 22 содержит жесткую вводимую трубку 28, прикрепленную к рукоятке 30, которая выполнена с возможностью удерживания и манипулирования медицинским специалистом 32, чтобы вводить дистальный конец 34 вводимой трубки в полость, такую как носовая полость или околоносовая пазуха пациента (не показан). Жесткий хирургический инструмент 22 также содержит первый датчик 36 магнитного поля, прикрепленный к проксимальному концу 38 хирургического инструмента. В некоторых вариантах осуществления первый датчик 36 магнитного поля выполнен с возможностью разъемного прикрепления к проксимальному концу 38. В конфигурации, показанной на Фиг. 1, первый датчик 36 магнитного поля размещен внутри съемного фиксатора 40, который соединяют с рукояткой 30 и вводимой трубкой 28.
Калибровочное устройство 24 содержит второй датчик 42 магнитного поля и датчик 44 приближения. В некоторых вариантах осуществления датчик 44 приближения содержит индикатор контакта, который генерирует сигналы приближения, которые могут обеспечивать индикацию при касании датчика приближения. Например, датчик 44 приближения может содержать датчик усилия, который указывает на контакт за счет изменения усилия, оптический датчик, который указывает на контакт за счет изменения интенсивности света, или электрический датчик, который указывает на контакт за счет изменения электрического параметра, такого как ток.
[0025] В вариантах осуществления, описанных в настоящем документе, в медицинской системе 20 используется определение местоположения посредством магнитных полей для определения координат местоположения дистального конца 34 хирургического инструмента 22. Для применения определения местоположения посредством магнитных полей пульт 26 управления содержит цепь 46 привода, которая приводит в действие генераторы 48 поля (также собирательно именуемые в настоящем документе генератором магнитного поля) для создания магнитных полей в трехмерном (3D) объеме над столом 50, при этом 3D объем включает в себя калибровочное устройство 24. Как правило, генераторы 48 поля содержат катушки, которые расположены ниже калибровочного устройства 24 в известных местоположениях снаружи относительно калибровочного устройства.
[0026] В дополнение к цепи 46 привода пульт 26 управления содержит процессор 52, коммуникационный интерфейс 54 ввода/вывода (I/O) и запоминающее устройство 56. Запоминающее устройство 56 может содержать любое приемлемое энергозависимое и/или энергонезависимое запоминающее устройство, такое как оперативное запоминающее устройство, жесткий диск или твердотельный диск. Коммуникационный интерфейс 54 I/O позволяет пульту управления передавать сигналы от датчиков 36 и 42 магнитного поля и датчика 44 приближения или на них. Датчики 36 и 42 магнитного поля, датчик 44 приближения и процессор 52 - все соединены с коммуникационным интерфейсом 54 I/O посредством проводных и/или беспроводных соединений.
[0027] В некоторых вариантах осуществления каждый из датчиков магнитного поля содержит комплект из трех ортогональных сенсорных катушек, а генераторы 48 поля содержат три ортогонально ориентированных генераторных катушки. Генераторные катушки обеспечивают передачу изменяющихся магнитных полей в область в 3D объеме, при этом изменяющиеся магнитные поля проходят через датчики магнитного поля и индуцируют в них сигналы, при этом процессор 52 может анализировать эти сигналы для определения местоположения и ориентации датчиков магнитного поля (например, относительно катушек в генераторе 48 поля) в координатной системе 58, содержащей ось 60 X, ось 62 Y и ось 64 Z. Способы отслеживания местоположения посредством магнитных полей описаны, например, в патентах США 5,391,199, 6,690,963, 5,443,489, 6,788,967, 5,558,091, 6,172,499 и 6,177,792, содержание которых включено в настоящий документ путем ссылки.
[0028] В вариантах осуществления настоящего изобретения процессор 52 обеспечивает калибровку жесткого хирургического инструмента 22 путем вычисления оправила преобразования координат первого датчика магнитного поля и дистального конца 34. В некоторых вариантах осуществления процессор 52 может сохранять в запоминающем устройстве 56 правило преобразования в виде калибровочного вектора 66, соответствующего смещению между первым датчиком магнитного поля и дистальным концом 34. Во время калибровки процессор 52 приводит в действие дисплей 68 (например, светодиодный монитор) для представления информации 70 о местоположении для датчиков магнитного поля и правила преобразования.
[0029] Процессор 52, как правило, содержит компьютер общего назначения с приемлемыми цепями входного каскада и интерфейса для приема сигналов от жесткого хирургического инструмента 22, калибровочного устройства 24 и управления другими компонентами пульта 26 управления. Для выполнения описанных в настоящем документе функций на процессоре 52 может быть установлено программное обеспечение. Программное обеспечение может быть загружено в пульт 26 управления в электронной форме, например по сети, или оно может быть предоставлено на энергонезависимом материальном носителе, таком как оптический, магнитный или электронный носитель информации. В альтернативном варианте осуществления некоторые или все функции процессора 52 могут осуществляться специализированными или программируемыми компонентами цифровых аппаратных средств.
КАЛИБРОВКА ЖЕСТКОГО ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА
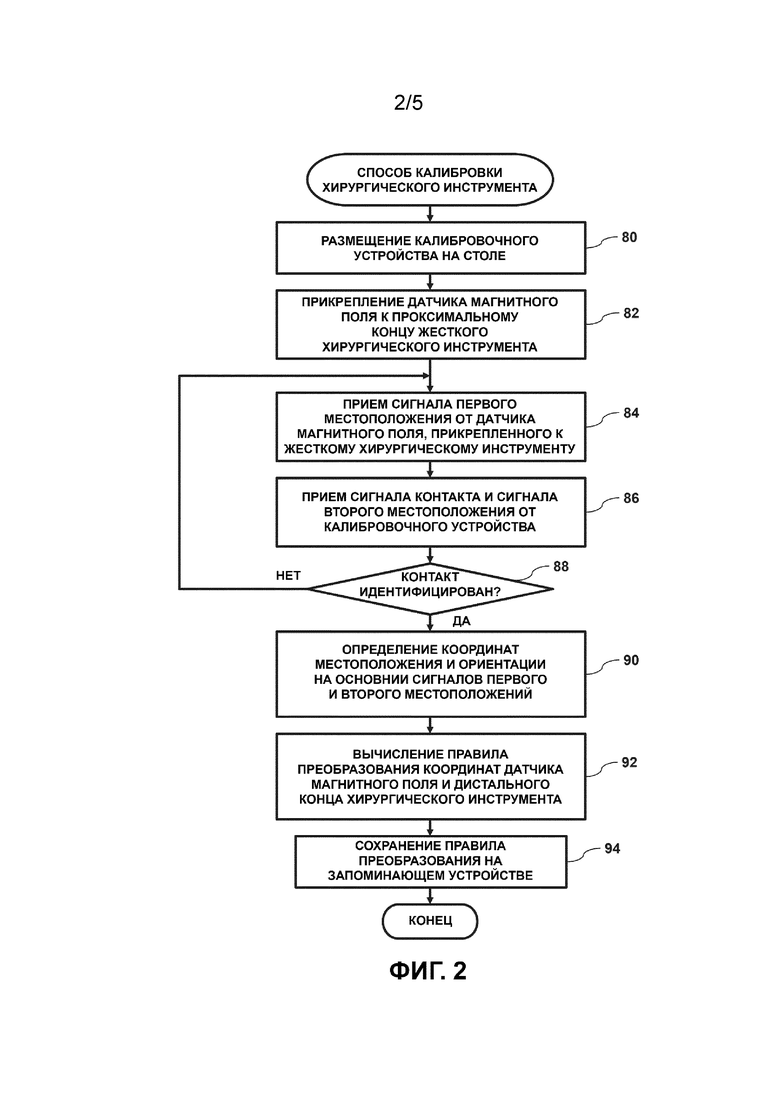
[0030] На Фиг. 2 представлена блок-схема, которая схематично иллюстрирует способ калибровки жесткого хирургического инструмента 22 в соответствии с вариантом осуществления настоящего изобретения. На стадии 80 размещения медицинский специалист 32 помещает калибровочное устройство 24 на стол 50, и на стадии 82 прикрепления медицинский специалист прикрепляет первый датчик 36 магнитного поля к проксимальному концу 38 жесткого хирургического инструмента 22. В примере, показанном на Фиг. 1, медицинский специалист 32 прикрепляет датчик магнитного поля посредством прикрепления одного конца съемного фиксатора 40 к рукоятке 30 и прикрепления другого конца съемного фиксатора к вводимой трубке 28.
[0031] После размещения калибровочного устройства 24 на столе 50 и прикрепления первого датчика 36 магнитного поля к проксимальному концу 38 медицинский специалист манипулирует рукояткой 30 таким образом, чтобы дистальный конец 34 вводимой трубки 28 перемещался по направлению к калибровочному устройству. На первой стадии 84 приема процессор 52 принимает сигнал первого местоположения от первого датчика 36 магнитного поля, и на второй стадии 86 приема процессор принимает сигнал контакта от датчика 44 приближения и сигнал второго местоположения от второго датчика 42 магнитного поля.
[0032] На стадии 88 сравнения, если сигнал контакта не указывает на контакт (например, посредством дистального конца 34) с калибровочным устройством 24, способ возвращают к стадии 84. Однако если сигнал контакта указывает на контакт с калибровочным устройством 24, то на стадии 90 определения процессор 52 определяет на основании сигналов местоположения координаты местоположения и ориентации для датчиков 36 и 42 магнитного поля. На стадии 92 вычисления процессор 52 вычисляет на основании установленной длины вводимой трубки 28 правило преобразования координат местоположения и ориентации для датчика 36 магнитного поля и дистального конца 34. В некоторых вариантах осуществления правило преобразования содержит ориентацию и расстояние между местоположениями первого датчика 36 магнитного поля и дистального конца 34 в координатной системе 58.
[0033] И, наконец, на стадии 94 сохранения процессор 52 сохраняет в запоминающем устройстве 56 правило преобразования, и способ завершается. В некоторых вариантах осуществления процессор может сохранять в запоминающем устройстве 56 правило преобразования в виде калибровочного вектора 66.
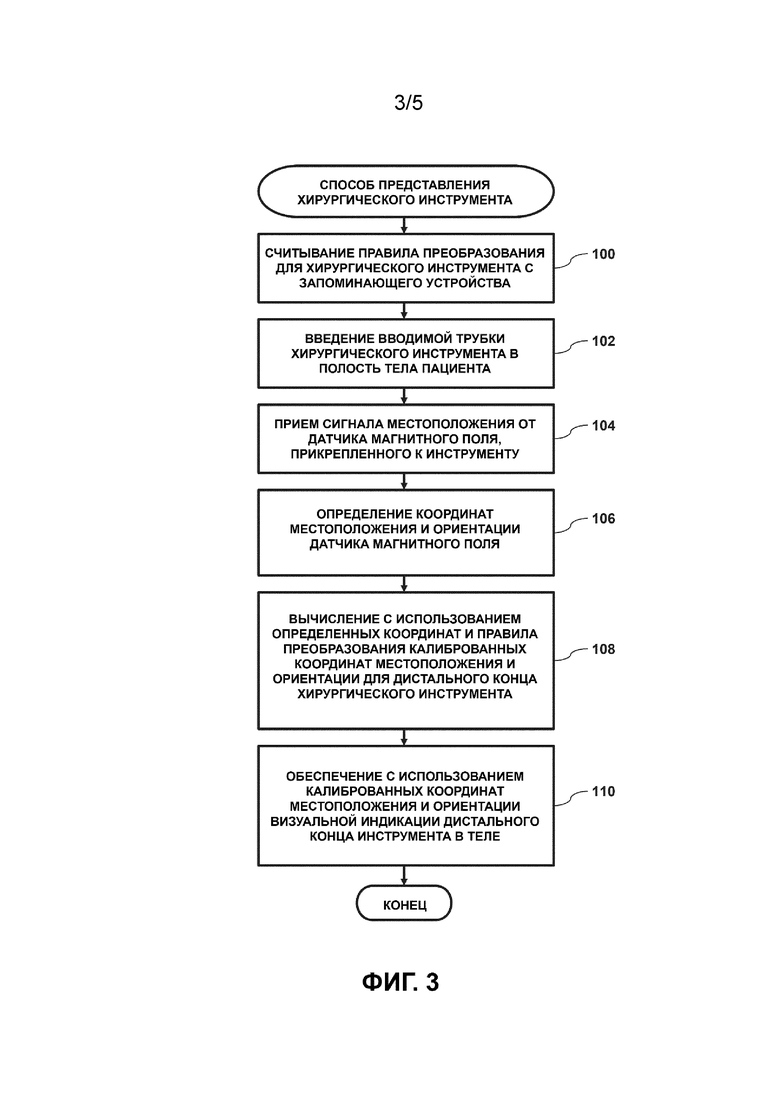
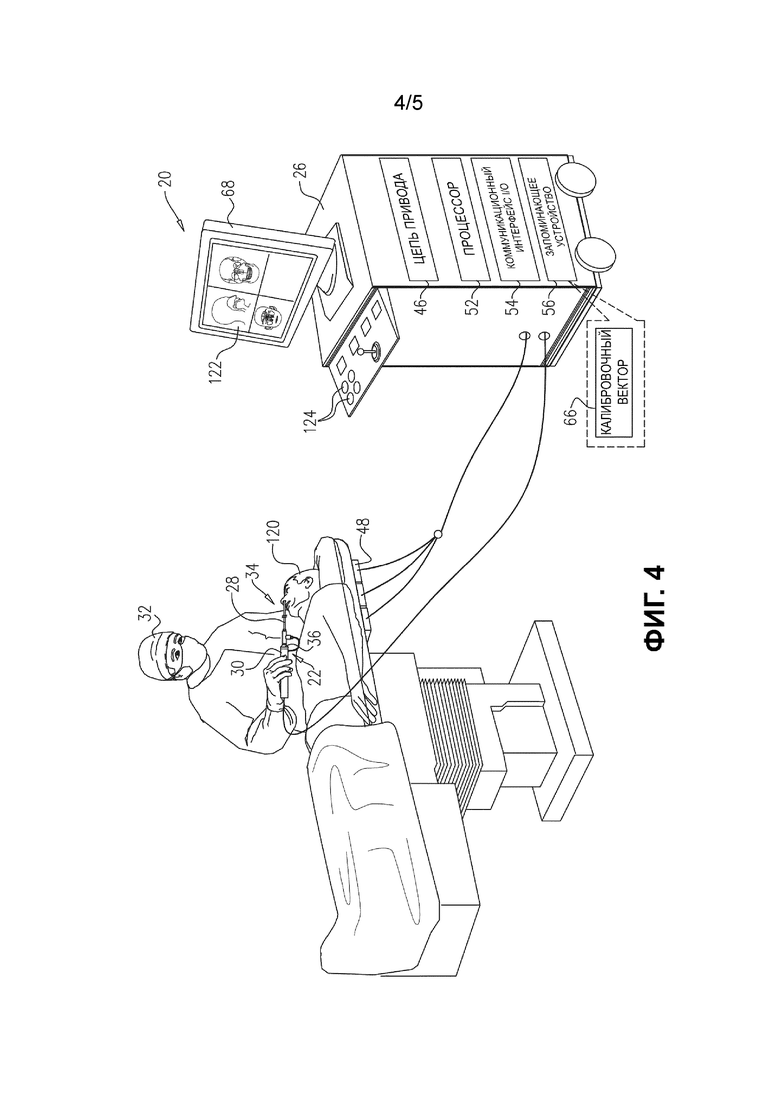
[0034] На Фиг. 3 представлена блок-схема, которая схематически изображает способ отображения дистального конца 34 жесткого хирургического инструмента на дисплее 68; на Фиг. 4 представлено схематическое наглядное изображение медицинского специалиста 32, использующего медицинскую систему 20 для выполнения процедуры на пациенте 120 (также именуемом в настоящем документе живым организмом); и на Фиг. 5 представлено схематическое наглядное изображение дистального конца 34 жесткого хирургического инструмента внутри головы 130 пациента в соответствии с вариантом осуществления настоящего изобретения. В некоторых вариантах осуществления калибровочное устройство 24 выполнено с возможностью размещения на пациенте 120, как правило, перед процедурой или во время ее проведения. Следует понимать, что калибровочное устройство 24 выполнено с возможностью размещения на любом контрольном объекте, таком как стол 50 или пациент 120, при условии, что сигналы от датчика 42 магнитного поля, генерируемые в ответ на поля, создаваемые генераторами 48, позволяют процессору 52 измерять местоположение и ориентацию калибровочного устройства.
[0035] Во время процедуры генераторы 48 магнитного поля передают изменяющиеся магнитные поля в заранее определенный рабочий объем, который содержит полость, такую как околоносовая пазуха пациента 120, при этом изменяющиеся магнитные поля индуцируют сигналы в первом датчике 36 магнитного поля, а процессор 52 анализирует эти сигналы для определения местоположения и ориентации первого датчика магнитного поля относительно генератора магнитного поля. Кроме того, во время процедуры процессор 52 может отображать на дисплее 68 информацию о процедуре, такую как изображение 122, которое показывает текущее местоположение дистального конца 34 внутри пациента 120. В некоторых вариантах осуществления пульт 26 управления может содержать одно или более устройств 124 ввода, которые медицинский специалист может использовать во время процедуры, чтобы манипулировать изображением.
[0036] На стадии 100 считывания процессор 52 считывает калибровочный вектор 66 из запоминающего устройства 56, и на стадии 102 введения медицинский специалист 32 вводит дистальный конец вводимой трубки 28 в полость организма пациента 120. В примере, показанном на Фиг. 5, полость организма содержит полость 132 пазухи в голове 130.
[0037] На стадии 104 приема процессор 52 принимает сигнал местоположения от первого датчика 36 магнитного поля, и на стадии 106 определения процессор определяет на основании полученного сигнала местоположения с использованием описанных выше вариантов осуществления координаты местоположения и ориентации в координатной системе 58 для первого датчика магнитного поля. На стадии 108 вычисления процессор 52 использует определенные координаты местоположения и ориентации и правило преобразования калибровочного вектора 66 для вычисления координат местоположения и ориентации для дистального конца 34. Наконец, на стадии 110 визуализации процессор 52 использует вычисленные координаты местоположения и ориентации для обеспечения на изображении 122 визуальной индикации дистального конца 34 в пациенте 122, и способ завершается.
[0038] Следует понимать, что описанные выше варианты осуществления приведены лишь для примера, и что настоящее изобретение не ограничено вариантами, показанными и подробно описанными в настоящем документе выше. Напротив, объем настоящего изобретения включает в себя и комбинации, и подкомбинации различных элементов, описанных в настоящем документе выше, а также их варианты и модификации, которые могут быть предложены специалистами в данной области после прочтения приведенного выше описания и которые не были описаны на предшествующем уровне техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ДЕБРИДЕРА | 2018 |
|
RU2781623C2 |
| УПРАВЛЯЕМЫЙ МИКРОМАНИПУЛЯТОРОМ ЛОКАЛЬНЫЙ ВИД С НЕПОДВИЖНЫМ ОБЩИМ ВИДОМ | 2013 |
|
RU2653836C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ВИЗУАЛИЗАЦИИ НА ДИСПЛЕЕ ИЗОБРАЖЕНИЯ ЧАСТИЧНО УПЛОЩЕННОЙ ПОВЕРХНОСТИ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ПОЛОСТИ, А ТАКЖЕ ПОСТОЯННЫЙ МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2020 |
|
RU2735068C1 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ОРИЕНТИРА | 2010 |
|
RU2568739C2 |
| СИСТЕМЫ ПОДАЧИ ЭНЕРГИИ И ИХ ПРИМЕНЕНИЕ | 2016 |
|
RU2721647C2 |
| ЧУВСТВИТЕЛЬНЫЙ К ДАВЛЕНИЮ ЗОНД С ВЫСОКОЙ ЧУВСТВИТЕЛЬНОСТЬЮ | 2009 |
|
RU2517599C2 |
| СЛЕДЯЩЕЕ УСТРОЙСТВО ДЛЯ ТОКОВОЙ ЛОКАЛИЗАЦИИ | 2009 |
|
RU2527152C2 |
| СПОСОБ И СИСТЕМА ЭЛЕКТРОМАГНИТНОГО СЛЕЖЕНИЯ В МЕДИЦИНСКОЙ ПРОЦЕДУРЕ | 2009 |
|
RU2519300C2 |
| КАТЕТЕР С ПОСЛЕДОВАТЕЛЬНО СОЕДИНЕННЫМИ СЕНСОРНЫМИ СТРУКТУРАМИ И СПОСОБЫ КАЛИБРОВКИ И ОБНАРУЖЕНИЯ | 2013 |
|
RU2655294C2 |
| Узел иглы, включающий выровненный магнитный элемент | 2013 |
|
RU2669621C2 |
Группа изобретений относится к медицинской технике. Аппарат включает в себя генератор магнитного поля, первый датчик магнитного поля, предназначенный для крепления к проксимальному концу хирургического инструмента, предназначенного для введения в организм, и калибровочное устройство, которое включает в себя второй датчик магнитного поля и датчик приближения. Датчики поля генерируют соответствующие сигналы местоположения, реагирующие на магнитное поле, создаваемое генератором и проходящее через датчики поля. Аппарат включает в себя блок управления, который принимает сигналы от всех датчиков, определяет соответствующие координаты местоположения и ориентации датчиков поля на основании сигналов, вычисляет правило преобразования координат первого датчика и дистального конца инструмента, который приводят в контакт с калибровочным устройством, и впоследствии применяет правило преобразования вместе с координатами первого датчика при обеспечении визуальной индикации местоположения дистального конца внутри организма. 3 н. и 17 з.п. ф-лы, 5 ил.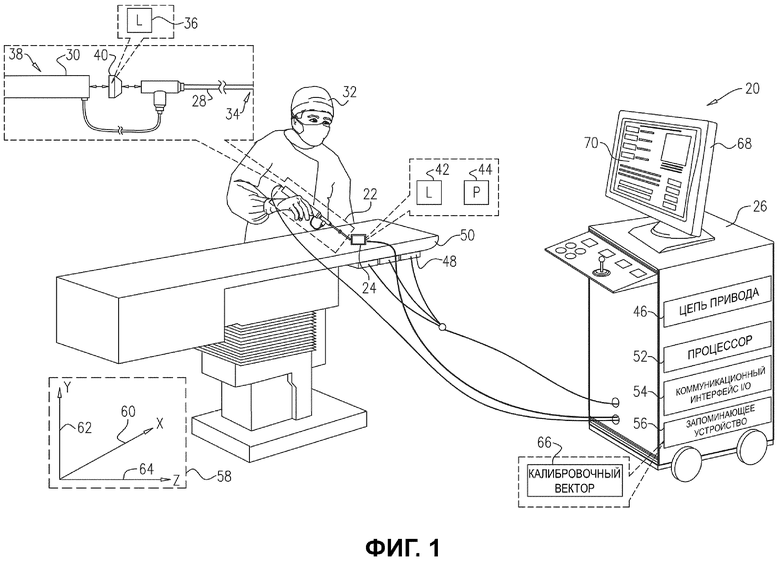
1. Аппарат для калибровки датчика магнитного поля, прикрепленного к жесткому хирургическому инструменту, содержащий:
генератор магнитного поля;
первый датчик магнитного поля, прикрепленный к проксимальному концу жесткого хирургического инструмента, выполненного с возможностью введения в живой организм;
калибровочное устройство, включающее в себя второй датчик магнитного поля и датчик приближения, причем первый и второй датчики поля генерируют соответствующие сигналы местоположения, реагирующие на магнитное поле, создаваемое генератором магнитного поля и проходящее через датчики, и при этом датчик приближения генерирует сигнал приближения, указывающий на контакт с калибровочным устройством; и
блок управления, который принимает сигналы от всех датчиков, определяет соответствующие координаты местоположения и ориентации датчиков магнитного поля на основании сигналов, вычисляет правило преобразования координат первого датчика магнитного поля и дистального конца инструмента, который приводят в контакт с калибровочным устройством, и затем применяет правило преобразования вместе с координатами первого датчика магнитного поля при обеспечении визуальной индикации местоположения дистального конца инструмента внутри организма.
2. Аппарат по п.1, в котором жесткий хирургический инструмент содержит жесткий эндоскоп.
3. Аппарат по п.1, в котором датчик приближения содержит индикатор контакта.
4. Аппарат по п.3, в котором датчик приближения выбирают из группы, состоящей из датчика усилия, оптического датчика и электрического датчика.
5. Аппарат по п.1, в котором первый датчик магнитного поля выполнен с возможностью разъемного прикрепления к проксимальному концу жесткого хирургического инструмента.
6. Аппарат по п.1, в котором калибровочное устройство выполнено с возможностью размещения на контрольном объекте.
7. Аппарат по п.6, в котором контрольный объект содержит поверхность живого организма.
8. Аппарат по п.1, содержащий дисплей, выполненный с возможностью представления визуальной индикации местоположения дистального конца инструмента внутри организма.
9. Аппарат по п.1, содержащий запоминающее устройство, при этом процессор выполнен с возможностью сохранения в запоминающем устройстве вычисленного правила преобразования и считывания с запоминающего устройства правила преобразования.
10. Аппарат по п.1, в котором правило преобразования включает в себя ориентацию и расстояние между местоположением первого датчика магнитного поля и местоположением дистального конца.
11. Способ калибровки датчика магнитного поля, прикрепленного к жесткому хирургическому инструменту, включающий этапы, на которых:
принимают от первого датчика магнитного поля, прикрепленного к проксимальному концу жесткого хирургического инструмента, сигналы первого местоположения, реагирующие на магнитное поле, создаваемое генератором магнитного поля и проходящее через первый датчик магнитного поля;
принимают от второго датчика магнитного поля в калибровочном устройстве сигналы второго местоположения, реагирующие на магнитное поле, создаваемое генератором магнитного поля и проходящее через второй датчик магнитного поля;
принимают от датчика приближения в калибровочном устройстве сигнал приближения, указывающий на контакт с калибровочным устройством;
определяют с помощью процессора соответствующие координаты местоположения и ориентации датчиков магнитного поля на основании сигналов;
вычисляют правило преобразования координат первого датчика магнитного поля и дистального конца инструмента, приводимого в контакт с калибровочным устройством; и
впоследствии применяют правило преобразования вместе с координатами первого датчика магнитного поля при обеспечении визуальной индикации местоположения дистального конца инструмента, введенного в живой организм.
12. Способ по п.11, в котором жесткий хирургический инструмент содержит жесткий эндоскоп.
13. Способ по п.11, в котором датчик приближения содержит индикатор контакта.
14. Способ по п.13, в котором датчик приближения выбирают из группы, состоящей из датчика усилия, оптического датчика и электрического датчика.
15. Способ по п.11, в котором первый датчик магнитного поля разъемно прикреплен к проксимальному концу жесткого хирургического инструмента.
16. Способ по п.11, в котором калибровочное устройство размещают на контрольном объекте.
17. Способ по п.11, в котором представление визуальной индикации включает в себя представление на дисплее местоположения дистального конца инструмента внутри организма.
18. Способ по п.11, включающий этапы, на которых сохраняют в запоминающем устройстве вычисленное правило преобразования и впоследствии считывают с запоминающего устройства правило преобразования.
19. Способ по п.11, в котором правило преобразования содержит ориентацию и расстояние между местоположением первого датчика магнитного поля и местоположением дистального конца.
20. Энергонезависимый машиночитаемый носитель, на котором хранятся программные команды компьютерного программного продукта, используемого совместно с жестким хирургическим инструментом, имеющим первый датчик магнитного поля, прикрепленный к проксимальному концу жесткого хирургического инструмента, причем команды при их считывании компьютером инициируют:
прием компьютером от первого датчика магнитного поля сигналов первого местоположения, реагирующих на магнитное поле, создаваемое генератором магнитного поля и проходящее через первый датчик магнитного поля;
прием от второго датчика магнитного поля в калибровочном устройстве сигналов второго местоположения, реагирующих на магнитное поле, создаваемое генератором магнитного поля и проходящее через второй датчик магнитного поля;
прием от датчика приближения в калибровочном устройстве сигнала приближения, указывающего на контакт с калибровочным устройством;
определение соответствующих координат местоположения и ориентации датчиков магнитного поля на основании сигналов;
вычисление правила преобразования координат первого датчика магнитного поля и дистального конца инструмента, приводимого в контакт с калибровочным устройством; и
последующее применение правила преобразования вместе с координатами первого датчика магнитного поля при обеспечении визуальной индикации местоположения дистального конца инструмента, введенного в живой организм.
| US 2008125720 A1, 29.05.2008 | |||
| WO 2006116597 A2, 02.11.2006 | |||
| WO 2007113815 A2, 11.10.2007 | |||
| RU 2015110976 A, 20.10.2016 | |||
| МЕДИЦИНСКИЙ ИНТЕРФЕЙС СЛЕЖЕНИЯ, ОБЕСПЕЧИВАЮЩИЙ ИНТЕРВЕНЦИОННУЮ ИНФОРМАЦИЮ | 2013 |
|
RU2635289C2 |

