ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к инвазивным медицинским устройствам, а конкретно к способам и устройствам для обнаружения смещения стыка в зонде, таком как катетер, который применяют в теле пациента.
УРОВЕНЬ ТЕХНИКИ
В некоторых диагностических и терапевтических методиках катетер вводят в камеру сердца и вводят в контакт с внутренней стенкой сердца. В таких методиках, как правило, важно, что дистальный кончик катетера входит в соприкосновение с эндокардом с давлением, достаточным для обеспечения хорошего контакта. Избыточное давление, однако, может послужить причиной нежелательного повреждения ткани сердца и даже перфорации стенки сердца.
Например, при внутрисердечной радиочастотной (RF) абляции катетер, имеющий электрод на своем дистальном кончике, вводят через сосудистую систему пациента в камеру сердца. Электрод вводят в контакт с участком (или участками) эндокарда, а RF энергию подают через катетер к электроду для того, чтобы произвести абляцию ткани сердца на данном участке. Для того чтобы получить желательный терапевтический эффект без излишнего повреждения ткани в процессе абляции, необходим надлежащий контакт между электродом и эндокардом.
Ряд патентных публикаций описывает катетеры со встроенными датчиками давления для распознавания контакта с тканью. В качестве одного примера публикация патентной заявки США 2007/0100332, чье раскрытие включено в данную заявку посредством ссылки, описывает системы и способы оценки контакта электрода с тканью для абляции ткани. Электромеханический датчик внутри трубки катетера генерирует электрические сигналы, соответствующие количеству движения электрода внутри дистальной части трубки катетера. Выходное устройство принимает электрические сигналы для оценки уровня контакта между электродом и тканью.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения, которые описаны ниже в данной работе, предоставляют новое устройство и способы обнаружения смещения стыка, генерируя и воспринимая магнитные поля с использованием магнитных измерительных преобразователей, таких как катушки, на противоположных сторонах стыка. Раскрытый вариант осуществления относится конкретно к применению данного вида устройства обнаружения в инвазивном медицинском зонде, в котором устройство обеспечивает показатель давления, прикладываемого на кончик зонда. Однако принципы настоящего изобретения можно применять аналогичным образом в вариантах использования других типов, которые требуют точного распознавания смещения стыка.
Вследствие этого, в соответствии с вариантом осуществления настоящего изобретения предоставлен медицинский зонд, включающий вводимую трубку, имеющую продольную ось и дистальный конец. Дистальный кончик расположен на дистальном конце вводимой трубки и сконфигурирован для введения в контакт с тканью тела. Стык соединяет дистальный кончик с дистальным концом вводимой трубки. Датчик стыка, заключенный внутри зонда, распознает положение дистального кончика относительно дистального конца вводимой трубки, причем датчик стыка включает первый и второй подузлы, которые расположены внутри зонда на противоположных соответствующих сторонах стыка, и каждый включает один или более магнитных измерительных преобразователей.
В некоторых вариантах осуществления магнитные измерительные преобразователи включают катушки, и первый подузел включает первую катушку, имеющую ось первой катушки, параллельную продольной оси вводимой трубки, а второй подузел включает две или более вторых катушек в различных соответствующих радиальных местоположениях внутри участка зонда, который отделен в осевом направлении от первого подузла. В одном варианте осуществления вторые катушки имеют оси соответствующих вторых катушек, которые являются параллельными продольной оси вводимой трубки. Дополнительно или альтернативно две или более вторых катушек включают, по меньшей мере, три вторые катушки, которые расположены внутри осевой плоскости зонда под разными соответствующими азимутальными углами вокруг продольной оси.
В раскрытом варианте осуществления датчик стыка сконфигурирован, чтобы генерировать сигнал, показывающий осевое смещение и ориентацию дистального кончика относительно дистального конца вводимой трубки. Обычно один из первого и второго подузлов присоединяют с возможностью приведения в действие электрическим током для излучения, по меньшей мере, одного магнитного поля, а другой из первого и второго подузлов присоединяют, чтобы выводить один или более сигналов в ответ на, по меньшей мере, одно магнитное поле, где сигналы показывают положение дистального кончика относительно дистального конца вводимой трубки.
В одном варианте осуществления зонд включает датчик положения для распознавания координат положения зонда относительно системы координат, которая отделена от зонда. Дополнительно или альтернативно, дистальный кончик включает электрод, который сконфигурирован, чтобы создавать электрический контакт с тканью.
В некоторых вариантах осуществления стык включает упругий элемент, который сконфигурирован, чтобы деформироваться в ответ на давление, прикладываемое к дистальному кончику, когда дистальный кончик входит в соприкосновению с тканью. Упругий элемент может включать трубчатую деталь из эластичного материала, имеющую винтовой срез вдоль участка длины детали.
В соответствии с вариантом осуществления настоящего изобретения также предоставлено устройство для выполнения медицинской процедуры на теле пациента. Устройство включает зонд, который включает вводимую трубку, имеющую продольную ось и дистальный конец; дистальный кончик, который расположен на дистальном конце вводимой трубки и сконфигурирован для введения в контакт с тканью тела; стык, который соединяет дистальный кончик с дистальным концом вводимой трубки; и датчик стыка, заключенный в зонд, для распознавания положения дистального кончика относительно дистального конца вводимой трубки, причем датчик стыка включает первый и второй подузлы, которые расположены внутри зонда на противоположных соответствующих сторонах стыка, каждый включает один или более магнитных измерительных преобразователей. Процессор присоединен для подачи тока к одному из первого и второго подузлов, заставляя тем самым один из подузлов генерировать, по меньшей мере, одно магнитное поле, и присоединен для получения и обработки одного или более сигналов, выводимых другим из первого и второго подузлов относительно указанного, по меньшей мере, одного магнитного поля так, чтобы обнаружить изменения в положении дистального кончика относительно дистального конца вводимой трубки.
В некоторых вариантах осуществления устройство включает генератор магнитного поля для генерирования дополнительного магнитного поля рядом с телом и датчик положения в зонде для генерирования сигнала положения в ответ на дополнительное магнитное поле, где процессор присоединен, чтобы принимать и обрабатывать сигнал положения для того, чтобы вычислять координаты зонда относительно системы координат, которая отделена от зонда. В раскрытом варианте осуществления датчик положения включает, по меньшей мере, один магнитный измерительный преобразователь в одном из первого и второго подузлов.
В соответствии с вариантом осуществления настоящего изобретения дополнительно предоставлено устройство для распознавания перемещения стыка в узле, имеющем продольную ось, проходящую через стык. Устройство включает первый и второй сенсорные подузлы, которые помещены внутри узла на противоположных соответствующих сторонах стыка и каждый включает один или более магнитных измерительных преобразователей. Процессор присоединен для подачи тока к одному из первого и второго узлов, заставляя тем самым один из узлов генерировать, по меньшей мере, одно магнитное поле, и присоединен для получения и обработки одного или более сигналов, выводимых другим из первого и второго узлов относительно указанного, по меньшей мере, одного магнитного поля так, чтобы обнаружить изменения в расположении стыка.
В соответствии с вариантом осуществления настоящего изобретения дополнительно предоставлен способ выполнения медицинской процедуры на ткани в теле пациента. Способ включает использование в теле зонда, который включает вводимую трубку и дистальный кончик, который присоединен к дистальному концу вводимой трубки посредством стыка, который включает датчик стыка, который заключен внутрь зонда и включает первый и второй подузлы, которые расположены внутри зонда на противоположных соответствующих сторонах стыка, каждый включает один или более магнитных измерительных преобразователей. Зонд продвигают так, чтобы дистальный кончик входил в соприкосновение и оказывал давление на ткань для того, чтобы вызвать изменение в положении дистального кончика относительно дистального конца вводимой трубки. К одному из первого и второго подузлов подают ток, заставляя тем самым один из подузлов генерировать, по меньшей мере, одно магнитное поле. Один или более выходных сигналов принимаются другим из первого и второго подузлов соответственно, по меньшей мере, одному магнитному полю и обрабатываются так, чтобы обнаруживать изменение в положении дистального кончика.
В одном варианте осуществления продвижение зонда включает введение электрода на дистальном кончике в электрический контакт с тканью. Способ может включать подачу электрической энергии на электрод так, чтобы производить абляцию области ткани, с которой дистальный кончик введен в соприкосновение, где положение дистального кончика относительно дистального конца вводимой трубки изменяется в ответ на давление дистального кончика на ткань и где подача электрической энергии включает регулирование применения энергии соответственно давлению, в соответствии с индикацией положения дистального кончика, так чтобы электрическая энергия подавалась на электрод, когда давление находится в пределах требуемого диапазона.
Настоящее изобретение будет понятно более полно из следующего подробного описания вариантов его осуществления, взятого вместе с чертежами, на которых:
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
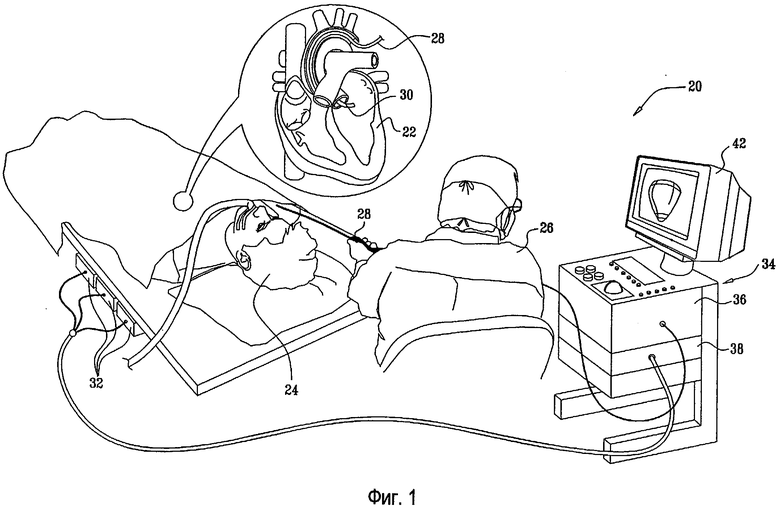
Фиг.1 представляет собой схематичную наглядную иллюстрацию медицинской системы, основанной на катетере, в соответствии с вариантом осуществления настоящего изобретения.
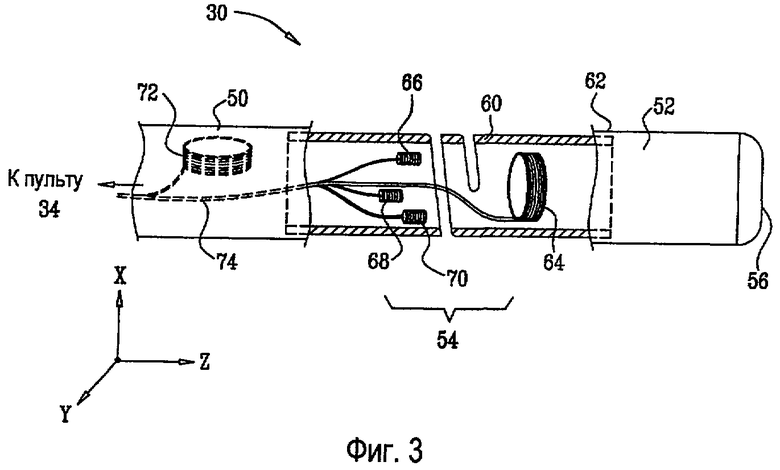
Фиг.2 представляет собой схематичное детальное изображение, показывающее дистальный кончик катетера в контакте с тканью эндокарда в соответствии с вариантом осуществления настоящего изобретения;
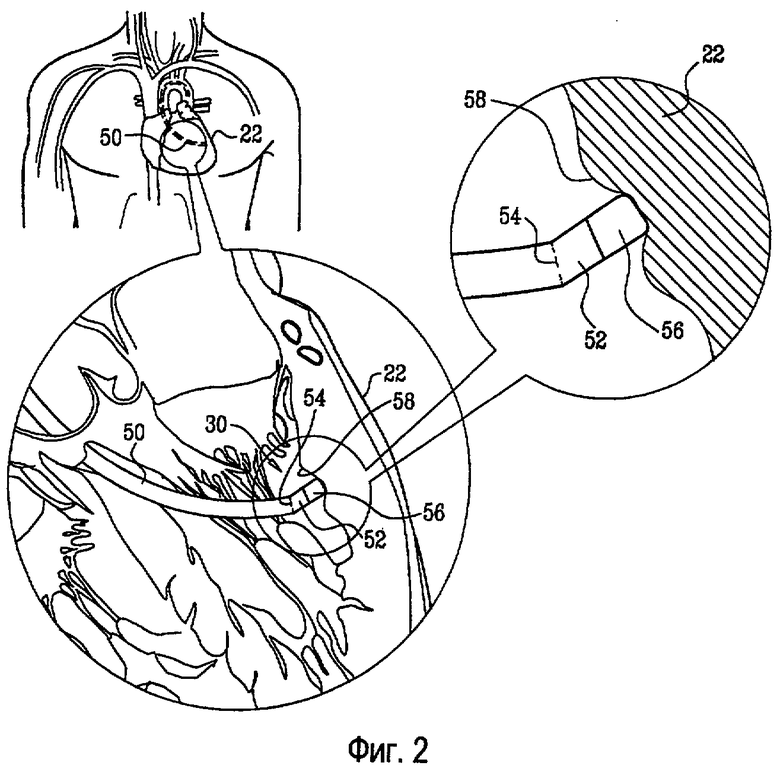
фиг.3 представляет собой схематичный разрез, показывающий детали дистального конца катетера в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Упомянутая выше патентная заявка США 11/868733 описывает катетер, чей дистальный кончик присоединен к дистальному концу вводимой трубки катетера посредством пружинного стыка, который деформируется в ответ на давление, прикладываемое на дистальный кончик, когда он входит в соприкосновение с тканью. Магнитный блок обнаружения положения внутри зонда, содержащий катушки на противоположных сторонах стыка, определяет положение дистального кончика относительно дистального конца вводимой трубки. Изменения в данном относительном положении показывают на деформацию пружины и, таким образом, обеспечивают индикацию давления.
Варианты осуществления настоящего изобретения, которые описаны далее в данной заявке, предоставляют новую конструкцию сенсорного блока, который способствует более точному измерению перемещения кончика. Конфигурация катушек в данной новой конструкции обеспечивает возможность точного определения очень маленьких отклонений сжатий стыка, соединяющего кончик катетера с вводимой трубкой. Вследствие этого давление на кончик может быть измерено с повышенной точностью, обеспечивая возможность использования относительно более жесткой пружины в катетере, что делает катетер более надежным и легким для манипулирования в теле.
Фиг.1 представляет собой схематичную наглядную иллюстрацию системы 20 для катетеризации сердца в соответствии с вариантом осуществления настоящего изобретения. Система 20 может быть основана, например, на системе CARTOTM, выпускаемой Biosense Webster Inc. (Diamond Bar, California). Данная система включает инвазивный зонд в виде катетера 28 и пульт управления 34. В варианте осуществления, описанном в данной заявке ниже, предполагается, что катетер 28 используется при проведении абляции ткани эндокарда, как известно в данной области. Альтернативно, катетер может быть использован, mutatis mutandis, для других терапевтических или диагностических целей в сердце или в других органах тела.
Оперирующий 26, такой как кардиолог, вводит катетер 28 через сосудистую систему пациента 24 таким образом, что дистальный конец 30 катетера входит в камеру сердца пациента 22. Оперирующий продвигает катетер таким образом, что дистальный кончик катетера входит в соприкосновение с тканью эндокарда в требуемом местоположении или местоположениях. Катетер 28 обычно присоединяют посредством подходящего соединительного провода на его проксимальном конце к пульту 34. Пульт может содержать генератор радиочастот (RF), который подает высокочастотную электрическую энергию через катетер для проведения абляции ткани в сердце в местоположениях, с которыми вошел в соприкосновение дистальный кончик. Альтернативно или дополнительно, катетер и система могут быть сконфигурированы для выполнения других терапевтических или диагностических процедур, известных в данной области.
Пульт 34 использует магнитное обнаружение положения, чтобы определить координаты положения дистального конца 30 катетера 28 внутри сердца 22. С этой целью схема задающего генератора в пульте 34 приводит в действие генераторы сигналов частоты полей 32, чтобы генерировать магнитные поля вблизи тела пациента 24. Обычно генераторы сигналов частоты полей содержат катушки, которые помещают ниже туловища пациента в известных положениях вне пациента. Данные катушки генерируют магнитные поля внутри тела в предварительно определенном рабочем пространстве, которое заключает сердце 22. Датчик магнитного поля внутри дистального конца 30 катетера 28 (показан на фиг.3) генерирует электрические сигналы в ответ на данные магнитные поля. Процессор сигналов 36 обрабатывает данные сигналы для того, чтобы определить координаты положения дистального конца, включающие обычно как координаты местоположения, так и ориентации. Данный способ обнаружения положения выполняется в упомянутой выше системе CARTO и подробно описан в патентах США 5391199, 6690963, 6484118, 6239724, 6618612 и 6332089, в патентной публикации РСТ WO 96/05768 и в публикациях патентных заявок США 2002/0065455 А1, 2003/0120150 А1 и 2004/0068178 А1, все раскрытия которых включены в данную заявку посредством ссылки.
Процессор 36 обычно содержит вычислительное устройство общего назначения с подходящим устройством предварительной обработки и интерфейсными схемами для приема сигналов от катетера 28 и управления другими компонентами пульта 34. Программное обеспечение может содержать программу выполнения процессором функций, описанных в данной заявке. Программное обеспечение можно загружать в пульт 34 в электронном виде, например через сеть, или его можно предоставлять на материальном носителе, таком как носитель с оптической, магнитной или электронной памятью. Альтернативно, некоторые или все функции процессора 36 могут выполняться специализированными или программируемыми цифровыми компонентами аппаратных средств. Основываясь на сигналах, принимаемых от катетера или других компонентов системы 20, процессор 36 приводит в действие дисплей 42, чтобы предоставить оперирующему 26 визуальную обратную связь относительно положения дистального конца 30 в теле пациента, а также относительно перемещения дистального кончика катетера и информацию о состоянии и рекомендации относительно выполняемой процедуры.
Альтернативно или дополнительно система 20 может включать автоматический механизм для манипулирования и управления катетером 28 внутри тела пациента 24. Подобные механизмы обычно способны управлять как продольным движением катетера (продвигать/втягивать), так и поперечным движением (отклонение/наведение) дистального конца катетера. Некоторые механизмы такого типа используют для данной цели, например магнитные поля постоянного тока. В таких вариантах осуществления процессор 36 генерирует управляющий импульс для управления движением катетера на основании сигналов, предоставляемых датчиком магнитного поля в катетере. Данные сигналы указывают как на положение дистального конца катетера, так и на силу, прикладываемую на дистальный конец, как дополнительно объясняется в данной заявке ниже.
Фиг.2 представляет собой схематичный разрез камеры сердца 22, показывающий дистальный конец 30 катетера 28 внутри сердца в соответствии с вариантом осуществления настоящего изобретения. Катетер содержит вводимую трубку 50, которую обычно вводят в сердце чрескожно через кровеносный сосуд, такой как полая вена или аорта. Электрод 56 на дистальном кончике 52 катетера входит в соприкосновение с тканью эндокарда 58. Давление, прикладываемое дистальным кончиком на эндокард, локально деформирует ткань эндокарда, так что электрод 56 входит в контакт с тканью на относительно большой площади. В нарисованном примере электрод входит в соприкосновение с эндокардом под углом, а не прямо. Дистальный кончик 52 вследствие этого изгибается на упругом стыке 54 относительно дистального конца вводимой трубки 50 катетера. Изгиб облегчает оптимальный контакт между электродом и тканью эндокарда.
Вследствие упругих свойств стыка 54 угол изгибания и осевое смещение стыка пропорциональны давлению, прикладываемому тканью 58 на дистальный кончик 52 (или, равнозначно, давлению, прикладываемому дистальным кончиком на ткань). Измерение угла изгиба и осевого смещения, таким образом, обеспечивает показание данного давления. Показание давления может быть использовано оперирующим с помощью катетера 20, обеспечивающего, что дистальный кончик давит на эндокард достаточно прочно, чтобы предоставить необходимый терапевтический или диагностический результат, но не настолько сильно, чтобы стать причиной нежелательного повреждения ткани.
Фиг.3 представляет собой схематичный разрез дистального конца 30 катетера 28, показывающий детали конструкции катетера в соответствии с вариантом осуществления настоящего изобретения. Вводимая трубка 50 связана с дистальным кончиком 52 посредством стыка 54, как отмечалось выше. Вводимую трубку покрывают гибким, изолирующим материалом 62, таким как Celcon®, Teflon® или, например, жаропрочным полиуретаном. Область стыка 54 также покрыта гибким изолирующим материалом, который может быть таким же, как материал 62, или может быть специально приспособлен, чтобы обеспечивать возможность свободного изгибания и сжатия стыка. (Данный материал срезан на фиг.3 для того, чтобы продемонстрировать внутреннюю структуру катетера.) Дистальный кончик 52 может быть покрыт, по меньшей мере, частично электродом 56, который обычно изготавливают из электропроводного материала, такого как платиноиридиевый сплав. Альтернативно, могут быть использованы другие подходящие материалы, как будет ясно квалифицированным специалистам в данной области. Кроме того, альтернативно, для некоторых областей применения дистальный кончик может быть изготовлен без покрывающего электрода. Дистальный кончик обычно относительно жесткий по сравнению с гибкой вводимой трубкой.
Стык 54 содержит упругий соединительный элемент 60. В данном варианте осуществления соединительный элемент имеет форму трубчатой детали из эластичного материала с винтовым срезом вдоль части своей длины. Например, соединительный элемент может содержать сверхупругий сплав, такой как никельтитановый (Нитинол). Винтовой срез заставляет трубчатую деталь вести себя как пружина в ответ на усилие, прикладываемое на дистальный кончик 52. Дополнительные подробности касательно изготовления и характеристик данного вида соединительного элемента представлены в патентной заявке США 12/134592, поданной 6 июня 2008 г., которая переуступлена на имя правопреемника настоящей патентной заявки и чье раскрытие включено в данную заявку посредством ссылки. Альтернативно, соединительный элемент может содержать цилиндрическую пружину или любой другой подходящий вид упругого компонента с необходимыми характеристиками прочности и гибкости.
Жесткость соединительного элемента 60 определяет диапазон относительного смещения между кончиком 52 и вводимой трубкой 50 в ответ на усилия, прикладываемые на дистальный кончик. Такие усилия возникают, когда дистальный кончик нажимает на эндокард в процессе процедуры абляции. Необходимое давление для хорошего электрического контакта между дистальным кончиком и эндокардом в процессе абляции составляет порядка 20-30 грамм. Соединительный элемент сконфигурирован для обеспечения возможности осевого смещения (т.е. бокового перемещения вдоль оси катетера 28) и углового отклонения дистального кончика пропорционально давлению на кончик. Измерение смещения и отклонения процессором 36 предоставляет показание давления и, таким образом, помогает обеспечивать, чтобы в процессе абляции прикладывалось правильное давление.
Блок определения положения стыка, содержащий катушки 64, 66, 68 и 70 внутри катетера 28, обеспечивает точное считывание положения дистального кончика 52 относительно дистального конца вводимой трубки 50, включая осевое смещение и угловое отклонение. Данные катушки представляют собой один тип магнитного измерительного преобразователя, который может быть использован в вариантах осуществления настоящего изобретения. «Магнитный измерительный преобразователь» в контексте настоящей патентной заявки и в формуле изобретения означает устройство, которое генерирует магнитное поле в ответ на прикладываемый электрический ток и/или выводит электрический сигнал в ответ на прикладываемое магнитное поле. Хотя в вариантах осуществления, описанных в данной заявке, в качестве магнитных измерительных преобразователей используются катушки, в альтернативных вариантах осуществления могут быть использованы другие типы магнитных измерительных преобразователей, как будет ясно квалифицированным специалистам в данной области.
Катушки в катетере 28 поделены между двумя подузлами на противоположных сторонах стыка 54: один подузел содержит катушку 64, которой управляют током через кабель 74 от пульта 34, чтобы генерировать магнитное поле. Данное поле воспринимает второй подузел, содержащий катушки 66, 68 и 70, которые помещены на участке катетера, который отделен от катушки 64 в осевом направлении. (Термин «осевой», как использовано в контексте настоящей патентной заявки и в формуле изобретения, относится к направлению продольной оси дистального конца 30 катетера 28, которое обозначено как Z-направление на фиг.3. Осевая плоскость представляет собой плоскость, перпендикулярную к данной продольной оси, а осевой участок представляет собой часть катетера, заключенную между двумя осевыми плоскостями.) Катушки 66, 68 и 70 испускают электрические сигналы в ответ на магнитное поле, сгенерированное катушкой 64. Данные сигналы подаются посредством кабеля 74 в процессор 36, который обрабатывает сигналы для того, чтобы измерить осевое смещение и угловое отклонение стыка 54.
Катушки 66, 68 и 70 закреплены в катетере 28 в различных радиальных местоположениях. (Термин «радиальный» относится к координатам относительно оси катетера, т.е. координатам в плоскости X-Y на фиг.3.) Конкретно, в данном варианте осуществления катушки 66, 68 и 70 все расположены в одной осевой плоскости с различными азимутальными углами вокруг оси катетера. Например, три катушки могут быть азимутально разнесены на 120о на одинаковом расстоянии от оси.
Оси катушек 64, 66, 68 и 70 являются параллельными оси катетера (и, таким образом, друг другу до тех пор, пока стык 54 остается неотклоненным). Следовательно, катушки 66, 68 и 70 будут выводить сильные сигналы в ответ на поле, сгенерированное катушкой 64, и сигналы будут сильно изменяться в зависимости от расстояния катушек 66, 68 и 70 от катушки 64. (Альтернативно, ось катушки 64 и/или катушек 66, 68 и 70 может быть расположена под углом относительно оси катетера до тех пор, пока оси имеют достаточный параллельный компонент для того, чтобы давать значительные сигналы.) Угловое отклонение кончика 52 будет вызывать дифференцированное изменение сигналов, выводимых катушками 66, 68 и 70, в зависимости от направления и величины отклонения, поскольку одна или две из данных катушек будет перемещаться относительно ближе к катушке 64. Сжимающее смещение кончика будет вызывать увеличение сигналов от всех катушек 66, 68 и 70.
Процессор 36 анализирует сигналы, выводимые катушками 66, 68 и 70, для того, чтобы измерить отклонение и смещение стыка 54. Сумма изменений в сигналах дает масштаб сжатия, тогда как разность изменений дает отклонение. Направление вектора разницы дает показатель направления изгиба. Для измерения точной зависимости сигналов от отклонения и смещения стыка может быть использована подходящая методика калибровки.
В дополнение к конфигурации, показанной и описанной выше, в сенсорных подузлах также могут быть использованы различные другие конфигурации катушек. Например, положения подузлов могут быть взаимно заменены так, чтобы генерирующая поле катушка находилась на проксимальной стороне стыка 54, а воспринимающие обмотки находились на дистальном кончике. В качестве еще одной альтернативы, катушки 66, 68 и 70 могут быть задействованы в качестве генераторов поля (с использованием временного и/или частотного разделения для распознавания полей), тогда как катушка 64 служит в качестве датчика. Размеры и количество катушек на фиг.3 показаны исключительно в виде примера, и аналогичным образом может быть использовано большее или меньшее количество катушек во всевозможных различных положениях при условии, что один из подузлов содержит, по меньшей мере, две катушки в различных радиальных положениях, чтобы обеспечить возможность дифференциального измерения отклонения стыка.
Перед калиброванием соотношение между давлением на кончик 52 и перемещением стыка 54 может быть использовано процессором 36 для преобразования сигналов катушек в показатели давления. На основании совместного определения смещения и отклонения данная система определения давления правильно определяет показания давления независимо от того, входит ли электрод в соприкосновение с эндокардом прямо или под углом. Определение давления невосприимчиво к колебаниям температуры и свободно от дрейфа в отличие, например, от пьезоэлектрических датчиков. Вследствие высокой чувствительности к движению стыка, которая обеспечивается расположением катушек 64, 66, 68 и 70, показанным на фиг.3, процессор 36 с высокой точностью может измерять маленькие смещения и отклонения. Вследствие этого соединительный элемент 60 может быть изготовлен относительно жестким, а процессор 36 будет все-таки в состоянии точно определять и измерять давление на кончике 52. Жесткость соединительного элемента позволяет оперирующему более легко поворачивать и управлять катетером.
Одна или более катушек 64, 66, 68 и 70 также могут быть использованы для вывода сигналов в ответ на магнитные поля, генерируемые генераторами сигналов частоты полей 32, и, таким образом, служить в качестве катушек определения положения. Процессор 36 обрабатывает данные сигналы для того, чтобы определить координаты (положение и ориентацию) дистального конца 30 во внешней системе координат, которая определяется генераторами сигналов частоты полей. Дополнительно или альтернативно для этой цели в дистальном конце катетера могут быть размещены одна или более дополнительных катушек (или других магнитных датчиков). Катушки определения положения в дистальном конце 30 катетера 28 обеспечивают пульту возможность 34 выводить как местоположение, так и ориентацию катетера в теле, и смещение и отклонение кончика 52, а также давление на кончик.
Хотя работа магнитного узла определения положения и его использование в определении давления описаны выше в контексте абляции, основанной на катетере, принципы настоящего изобретения аналогичным образом могут быть применены в других областях применения, которые требуют точного определения перемещения стыка, и особенно в терапевтических и диагностических областях применения, которые используют инвазивные зонды как в сердце, так и в других органах тела. В качестве одного примера устройства и методики для определения положения и давления, которые воплощены в системе 20, могут быть применены в направлении и управлении использования вводимой оболочки катетера. Если положением оболочки не управлять соответствующим образом и при ее введении использовать избыточное усилие, оболочка может перфорировать стенку сердца или сосудистую ткань. Этого можно, по существу, избежать, определяя положение и давление на дистальный кончик оболочки. В этом смысле термин «дистальный кончик», как используется в данной заявке, необходимо понимать как включение любого вида конструкции на дистальном конце зонда, которую можно изгибать и/или перемещать относительно основного корпуса зонда.
Таким образом, должно быть ясно, что варианты осуществления, описанные выше, приведены посредством примера, и настоящее изобретение не ограничено тем, что было конкретно показано и описано выше. Точнее, объем правовых притязаний настоящего изобретения включает как комбинации, так и подкомбинации различных признаков, описанных в данной заявке выше, а также их варианты и модификации, которые могли бы прийти на ум квалифицированным специалистам в данной области при чтении вышеизложенного описания и которые не раскрыты в предыдущем уровне техники.
Изобретение относится к инвазивным медицинским устройствам. Медицинский зонд содержит вводимую трубку, имеющую продольную ось и дистальный конец, дистальный кончик, расположенный на дистальном конце вводимой трубки и сконфигурированный для введения в контакт с тканью тела, стык, который соединяет дистальный кончик с дистальным концом вводимой трубки, и датчик стыка, заключенный внутри зонда, для распознавания положения дистального кончика относительно дистального конца вводимой трубки, причем датчик стыка содержит первый и второй подузлы, которые расположены внутри зонда на противоположных соответствующих сторонах стыка, и каждый подузел содержит один или более магнитных измерительных преобразователей. Стык содержит упругий элемент, который сконфигурирован, чтобы деформироваться в ответ на давление, прикладываемое на дистальный кончик, когда он входит в соприкосновение с тканью, при этом упругий элемент содержит трубчатую деталь из эластичного материала, имеющую винтовой срез вдоль части длины детали. Устройство для исполнения медицинской процедуры включает зонд и процессор, который присоединен с возможностью подавать ток к одному из первого и второго подузлов, заставляя тем самым один из подузлов генерировать, по меньшей мере, одно магнитное поле, и для приема и обработки одного или более сигналов, выводимых другим из первого и второго подузлов относительно указанного, чтобы обнаруживать изменения в положении дистального кончика относительно дистального конца вводимой трубки. Устройство для обнаружения перемещения стыка в узле содержит первый и второй сенсорные подузлы, которые расположены внутри узла на противоположных соответствующих сторонах стыка, при этом каждый подузел содержит один или более магнитных измерительных преобразователей, и процессор, выполненный с возможностью обнаруживания посредством обработки одного или более сигналов осевое сжатие стыка и угловое отклонение стыка. Способ выполнения медицинской процедуры на ткани в теле пациента включает применение в теле зонда и продвижение его таким образом, чтобы дистальный кончик входил в соприкосновение и прикладывал давление на ткань, подачу тока к одному из первого и второго подузлов и прием и обработку одного или более сигналов, выводимых другим из первого и второго подузлов относительно указанного, по меньшей мере, одного магнитного поля так, чтобы обнаруживать изменение в положении дистального кончика. Использование изобретения позволяет повысить надежность и легкость манипулирования катетером в теле. 4 н. и 23 з.п. ф-лы, 3 ил.
1. Медицинский зонд, содержащий:
вводимую трубку, имеющую продольную ось и имеющую дистальный конец;
дистальный кончик, который расположен на дистальном конце вводимой трубки и сконфигурирован для введения в контакт с тканью тела;
стык, который соединяет дистальный кончик с дистальным концом вводимой трубки; и
датчик стыка, заключенный внутри зонда, для распознавания положения дистального кончика относительно дистального конца вводимой трубки, причем датчик стыка содержит первый и второй подузлы, которые расположены внутри зонда на противоположных соответствующих сторонах стыка, и каждый подузел содержит один или более магнитных измерительных преобразователей;
где стык содержит упругий элемент, который сконфигурирован, чтобы деформироваться в ответ на давление, прикладываемое на дистальный кончик, когда дистальный кончик входит в соприкосновение с тканью, при этом упругий элемент содержит трубчатую деталь из эластичного материала, имеющую винтовой срез вдоль части длины детали.
2. Зонд по п.1, в котором магнитный измерительный преобразователь содержит катушки и где первый подузел содержит первую катушку, имеющую ось первой катушки, параллельную продольной оси вводимой трубки, и где второй подузел содержит две или более вторых катушек в разных соответствующих радиальных местоположениях в пределах участка зонда, который отделен в осевом направлении от первого подузла.
3. Зонд по п.2, где вторые катушки имеют соответствующие оси вторых катушек, которые являются параллельными продольной оси вводимой трубки.
4. Зонд по п.2, где две или более вторых катушек представляют собой, по меньшей мере, три вторых катушки.
5. Зонд по п.4, где, по меньшей мере, три вторых катушки расположены в пределах осевой плоскости зонда под разными соответствующими азимутальными углами вокруг продольной оси.
6. Зонд по п.1, где датчик стыка сконфигурирован для генерирования сигнала, показывающего осевое смещение и ориентацию дистального кончика относительно дистального конца вводимой трубки.
7. Зонд по п.6, где один из первого и второго подузлов присоединен для приведения в действие электрическим током, чтобы излучать, по меньшей мере, одно магнитное поле, а другой из первого и второго подузлов присоединен, чтобы выводить один или более сигналов в ответ на, по меньшей мере, одно магнитное поле, где сигналы показывают положение дистального кончика относительно дистального конца вводимой трубки.
8. Зонд по п.1, содержащий датчик положения для определения координат положения зонда относительно системы координат, которая отделена от зонда.
9. Зонд по п.1, где дистальный кончик содержит электрод, который сконфигурирован для создания электрического контакта с тканью.
10. Устройство для исполнения медицинской процедуры на теле пациента, причем устройство содержит:
зонд по любому из пп.1-9; и
процессор, который присоединен, чтобы подавать ток к одному из первого и второго подузлов, заставляя тем самым один из подузлов генерировать, по меньшей мере, одно магнитное поле, и который присоединен для приема и обработки одного или более сигналов, выводимых другим из первого и второго подузлов относительно указанного, по меньшей мере, одного магнитного поля, для того, чтобы обнаруживать изменения в положении дистального кончика относительно дистального конца вводимой трубки.
11. Устройство по п.10, где магнитные измерительные преобразователи содержат катушки и где первый подузел содержит первую катушку, имеющую ось первой катушки, параллельную продольной оси вводимой трубки, и где второй подузел содержит две или более вторых катушек в разных соответствующих радиальных местоположениях в пределах участка зонда, который отделен в осевом направлении от первого подузла.
12. Устройство по п.10, где изменения в положении дистального кончика, обнаруженные процессором, включают дистальное осевое смещение дистального кончика и отклонение дистального кончика относительно дистального конца вводимой трубки.
13. Устройство по п.10, где стык содержит упругий элемент, который сконфигурирован, чтобы деформироваться в ответ на давление, прикладываемое на дистальный кончик, когда дистальный кончик входит в соприкосновение с тканью.
14. Устройство по п.13, где процессор сконфигурирован, чтобы генерировать выходной сигнал соответственно обнаруженным изменениям в положении, который показывает давление, прикладываемое на дистальный кончик.
15. Устройство по п.10, содержащее генератор магнитного поля для генерирования дополнительного магнитного поля рядом с телом и датчик положения в зонде для генерирования сигнала положения в ответ на дополнительное магнитное поле, где процессор присоединен для приема и обработки сигнала положения для того, чтобы вычислять координаты зонда относительно системы координат, которая отделена от зонда.
16. Устройство по п.15, где датчик положения содержит, по меньшей мере, один из магнитных измерительных преобразователей в одном из первого и второго подузлов.
17. Устройство для обнаружения перемещения стыка в узле, имеющем продольную ось, проходящую через стык, причем устройство содержит:
первый и второй сенсорные подузлы, которые расположены внутри узла на противоположных соответствующих сторонах стыка, и каждый подузел содержит один или более магнитных измерительных преобразователей; и
процессор, который присоединен, чтобы подавать ток к одному из первого и второго подузлов, заставляя тем самым один из подузлов генерировать, по меньшей мере, одно магнитное поле, и который присоединен, чтобы получать и обрабатывать один или более сигналов, выводимых другим из первого и второго подузлов относительно указанного, по меньшей мере, одного магнитного поля так, чтобы обнаруживать изменения в расположении стыка;
где процессор сконфигурирован таким образом, чтобы обнаруживать посредством обработки одного или более сигналов осевое сжатие стыка и угловое отклонение стыка.
18. Устройство по п.17, где магнитный измерительный преобразователь содержит катушки и где первый подузел содержит первую катушку, имеющую ось первой катушки, параллельную продольной оси вводимой трубки, и где второй подузел содержит две или более вторых катушек в разных соответствующих радиальных местоположениях в пределах участка узла, который отделен в осевом направлении от первого подузла.
19. Устройство по п.17, где стык содержит упругий элемент, который сконфигурирован, чтобы деформироваться в ответ на давление, прикладываемое на узел, и где процессор сконфигурирован, чтобы генерировать выходной сигнал, соответственно обнаруженным изменениям в расположении, который показывает давление, прикладываемое на узел.
20. Способ выполнения медицинской процедуры на ткани в теле пациента, причем способ включает:
применение в теле зонда по любому из пп.1-9,
продвижение зонда таким образом, чтобы дистальный кончик входил в соприкосновение и прикладывал давление на ткань для того, чтобы вызвать изменение в положении дистального кончика относительно дистального конца вводимой трубки;
подачу тока к одному из первого и второго подузлов, заставляя тем самым один из подузлов генерировать, по меньшей мере, одно магнитное поле; и
прием и обработку одного или более сигналов, выводимых другим из первого и второго подузлов относительно указанного, по меньшей мере, одного магнитного поля так, чтобы обнаруживать изменение в положении дистального кончика.
21. Способ по п.20, где магнитные измерительные преобразователи содержат катушки и где первый подузел содержит первую катушку, имеющую ось первой катушки, параллельную продольной оси вводимой трубки, и где второй подузел содержит две или более вторых катушек в разных соответствующих радиальных местоположениях в пределах участка зонда, который отделен в осевом направлении от первого подузла.
22. Способ по п.20, где обработка одного или более сигналов включает в себя обнаружение осевого смещения и ориентации дистального кончика относительно дистального конца вводимой трубки.
23. Способ по п.20, где стык содержит упругий элемент, который сконфигурирован, чтобы деформироваться в ответ на давление на дистальный кончик, и где обработка одного или более сигналов включает в себя генерирование, соответственно обнаруженному изменению в положении, показания давления, приложенного на дистальный кончик.
24. Способ по п.20, включающий в себя генерирование дополнительного магнитного поля рядом с телом и обнаружение сигнала положения, выводимого одним из первого и второго подузлов, в ответ на дополнительное магнитное поле для того, чтобы вычислять координаты зонда относительно системы координат, которая отделена от зонда.
25. Способ по п.20, где продвижение зонда включает в себя введение электрода на дистальном кончике в электрический контакт с тканью.
26. Способ по п.25, включающий в себя подачу электрической энергии на электрод так, чтобы провести абляцию области ткани, с которой вошел в соприкосновение дистальный кончик.
27. Способ по п.26, где положение дистального кончика относительно дистального конца вводимой трубки меняется в ответ на давление дистального кончика на ткань и где подача электрической энергии включает в себя регулирование применения энергии соответственно давлению, в соответствии с индикацией положения дистального кончика, так чтобы электрическая энергия подавалась на электрод, когда давление находится в пределах требуемого диапазона.
| US 2001047133 A1, 29.11.2001 | |||
| US 2002065455 A1, 30.05.2002 | |||
| US 6892091 B1, 10.05.2005 | |||
| US 2007106114 A1, 10.05.2007 | |||
| Лапчатый зажим для прикрепления глухого фланца к фланцам паровозных, паропроводных труб и арматурных частей при гидравлическом их испытании | 1926 |
|
SU9382A1 |
| ФОТОМАТРИЧНОЕ УСТРОЙСТВО | 1999 |
|
RU2195981C2 |

