ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к области медицины и, более конкретно, оно относится к системе электромеханической стимуляции для лечения пациента, страдающего от симптомов тиннитуса или фантомного шума.
[0002] Более конкретно, изобретение относится к устройству для обеспечения такого лечения неинвазивным методом.
УРОВЕНЬ ТЕХНИКИ
[0003] Фантомный шум, или тиннитус, является нарушением слуха, которое может мешать правильному восприятию звуков и, в частности, разговорной речи. Фактически, тиннитус - это ощущение шумов, имеющих различные частоты и интенсивность, которые не связаны с каким-либо акустическим сигналом, поступающим из окружающей среды. Эти шумы можно услышать в одном ухе, в обоих ушах или, в общем случае, как шумы изнутри головы.
[0004] В частности, тиннитус можно услышать как одночастотный шум, например, свист, звон или тому подобное, и в этом случае его называют тональным тиннитусом, или его можно услышать как широкополосный шум, такой как свист, жужжание, шепот и тому подобное, в этом случае его называют нетональным тиннитусом. Симптомы тиннитуса являются достаточно частыми, могут иметь различную интенсивность и даже могут нарушать повседневную деятельность пациента, и его/ее сон, и даже вызывать серьезные когнитивные и поведенческие заболевания, которые могут серьезно повлиять на качество жизни пациента.
[0005] Тиннитус обычно лечится аудиоустройствами, которые настроены на предоставление пользователю терапевтических методов лечения, основанных на тональных сигналах, эффект которых состоит в том, чтобы маскировать определенную частоту симптомов тиннитуса.
[0006] Пример устройства такого типа раскрыт в патенте США 5325872 и содержит блок управления для подачи аудиосигнала с несущей частотой, которая может быть настроена соответствующим образом в заданном диапазоне, пока не будет найдено оптимальное значение, которое ослабляет или маскирует симптомы наилучшим образом.
[0007] Также известно хирургически имплантируемое устройство, описанное в патенте США 6077215, в котором наиболее внутренняя часть уха стимулируется электромеханическим преобразователем, имплантированным в сосцевидный отросток. Эти устройства инвазивны, вызывают побочные эффекты и, в любом случае, никогда не оказывались эффективными (Dobie RA. «A review of randomized clinical trials in tinnitus». Ларингоскопия 1999, 109, 1202.1211).
[0008] В патенте США 5788656 описан еще один пример системы стимуляции, содержащей электромеханическое устройство с электромагнитным управлением, которое должно быть расположено рядом с улиткой во внутреннем ухе. Это электромеханическое устройство может стимулировать улитку в диапазоне частот тиннитуса. В этом случае, несколько генераторов, работающих на низкой и на высокой частоте, соответственно, в пределах установленного диапазона от 400 Гц до 1000 Гц, обеспечивают стимулирующий сигнал управления. Посредством данной системы, пользователь может настроить терапевтическое лечение в соответствии с его/ее собственным нуждами, регулируя частоту колебаний воздействующего устройства.
[0009] Эта терапевтическая система также является инвазивной и не позволяет проводить стимулирующую терапию, которая эффективна для уменьшения или подавления симптомов в среднесрочной перспективе.
[0010] Патент США 2008/0064993 A1 описывает использование устройства, содержащего электромеханический преобразователь, который при установке в кость ротовой полости, такую как зубная кость или небная кость, обеспечивает механические колебания с частотой и амплитудой, которую можно регулировать. В частности, это устройство использует звуковую проводимость кости и может формировать акустический сигнал, который маскирует восприятие симптомов тиннитуса, накладывая на него механические колебания, которые подавляют симптомы тиннитуса, или добавляя приятные механические вибрации, которые отвлекают внимание пользователя от симптомов тиннитуса. Тем не менее, в патенте США 2008/0064993 A1 не указано, как определить частоты, подходящие для подавления симптомов тиннитуса, а используются только таблицы значений, полученные в результате исследований, проведенных на выборке пациентов, или выполненных специальных аудиологических тестов для каждого пользователя.
[0011] В патенте США 6210321 В1 описан еще один пример системы для уменьшения симптомов тиннитуса, включающий полужесткую мембрану, которая должна быть размещена снаружи уха на сосцевидной кости, в непосредственной близости от улитки. Мембрана выполнена с возможностью возбуждения посредством электрической стимуляции и передачи механических колебаний в улитку. В этом случае пользователь может получить индивидуальную терапию, отрегулировав параметры частоты и интенсивности стимуляции. Однако, эта настройка сложна и неудобна для пользователя.
[0012] Другие устройства для лечения тиннитуса описаны в патенте США 2015/164381 A1, патенте США 2013/163797 A1, патенте Европейского патентного ведомства EP 3184046 A1, патенте США 2016/250440 A1.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0013] Таким образом, отличительными признаками настоящего изобретения является предоставление электромеханической системы стимуляции для лечения симптомов тиннитуса, которая обеспечивает неинвазивное, легко настраиваемое терапевтическое лечение, которое сосредоточено на ощущениях пользователя.
[0014] Также отличительным признаком настоящего изобретения является создание системы электромеханической стимуляции для лечения симптомов тиннитуса, которая может быть легко отрегулирована как терапевтом, так и пользователем, таким образом, при обычном использовании системы в домашних условиях помощь терапевта практически не требуется.
[0015] Также отличительным признаком настоящего изобретения является создание системы электромеханической стимуляции для лечения симптомов тиннитуса, которая может применяться без хирургического вмешательства.
[0016] Еще одной особенностью настоящего изобретения является предоставление такой системы, которая может быть настроена с помощью устройств, обычно доступных для пользователя.
[0017] Эти и другие цели достигаются с помощью [1] системы электромеханической стимуляции для лечения симптомов тиннитуса, содержащей:
- проксимальный блок, выполненный с возможностью расположения вблизи уха пользователя, при этом проксимальный блок содержит:
- электромеханическое устройство, выполненное с возможностью передачи механических колебаний в ткани возле уха пользователя или, в любом случае, в череп пользователя, причем механические колебания имеют заданную частоту, интенсивность и форму волны;
- устройство для наложения, выполненное с возможностью поддержания электромеханического устройства в контакте с тканями, соответствующими костным отросткам головы, выбранным из височной кости, в частности, сосцевидным отростком; затылочной костью; лобной костью;
- блок управления, выполненный с возможностью для приведения в действие электромеханического устройства таким образом, что частота, интенсивность и форма волны механических колебаний могут быть изменены;
- приемопередающий элемент, выполненный с возможностью приема сигналов управления для блока управления;
- интерфейс ввода, выполненный с возможностью работы под управлением пользователя, содержащий:
- передающий элемент, выполненный с возможностью передачи управляющих сигналов на приемопередающий элемент проксимального блока;
- микроконтроллер, выполненный с возможностью излучать вышеуказанные сигналы управления в направлении вышеуказанного блока управления для генерации механических колебаний вышеуказанного электромеханического устройства в первом диапазоне частот, установленном в диапазоне от 20 Гц до 20 кГц, и с интенсивностью, меньшей, чем предварительно заданное предельное значение интенсивности, и вызывать повторение вышеуказанных механических колебаний для множества частот в этом диапазоне;
- устройство ввода, выполненное с возможностью:
- получения от пользователя команды начать генерирование механических колебаний посредством вышеуказанного электромеханического устройства на множестве разных частот,
- ожидания, пока генерируются механические колебания на вышеуказанных разных частотах;
- получения от вышеуказанного пользователя команды остановки сканирования частоты для прекращения изменения частоты механических колебаний на стационарной частоте, соответствующей текущей частоте сгенерированной механической вибрации таким образом, что пользователь может уведомить микроконтроллер о значении частоты, при котором он/она чувствует уменьшение симптомов тиннитуса;
- продолжения генерирования механических колебаний на вышеуказанной стационарной частоте.
[0018] Таким образом, устройство для наложения, которое выполнено с возможностью поддержания электромеханического устройства в контакте с тканями, соответствующими костным отросткам головы, выбранным из височной кости, в частности сосцевидного отростка, затылочной кости, лобной кости, имеет технический эффект, вызывая передачу механических колебаний в виде:
- слуховой стимуляция посредством костной проводимости;
- вестибулярной стимуляции посредством костной проводимости;
- тактильной стимуляции кожи;
- вибраторной проприоцептивной стимуляции,
достигая, таким образом, мультисенсорной стимуляции. Фактически, помимо достижения вестибулярной зоны посредством костной проводимости и уменьшения симптомов тиннитуса, колебания, доставляемые к коже подходящим способом, также обеспечивают, в более широком смысле, проприоцептивную локализацию зоны передачи вибростимуляции.
[0019] Кроме того, система: пытается определить возможные частоты такой мультисенсорной стимуляции, соответственно, генерирует механические колебания на всех частотах в установленном диапазоне от 20 Гц до 20 кГц, в частности, в диапазоне от 125 Гц до 8000 Гц, причем вышеуказанные частоты отличаются друг от друга, например на 1 Гц, ожидает команду остановки сканирования частоты для механических колебаний, которая возникает, когда пользователь ощущает уменьшение или исчезновение симптомов тиннитуса, и поддерживает частоту последующих механических колебаний на стационарном значении частоты. Такое решение позволяет индивидуально найти для каждого пользователя различные значения стационарной частоты, при которых у каждого пользователя исчезают или уменьшаются симптомы тиннитуса по интенсивности.
[0020] По сравнению с патентом США 2015/164381 A1, патентом США 2013/163797 A1, патентом Европейского патентного ведомства EP 3184046 A1, патентом США 2016/250440 A1 настоящее изобретение имеет отличия и преимущества, описанные ниже.
[0021] В настоящем изобретении мультисенсорные стимуляции используются для смягчения/подавления симптомов тиннитуса путем доставки механических колебаний в области кожи, расположенные вблизи височной кости и/или затылочной кости, и/или лобной кости, с интенсивностью ниже предварительно заданного порога интенсивности, который может быть порогом слышимости пациента, или с интенсивностью, немного превышающей порог слышимости, как описано ниже, чтобы избежать искажений или усиления слухового восприятия и способствовать применению устройства в течение 24 часов, что было бы неудобно и затруднительно при более высокой интенсивности. Мультисенсорные стимуляции включают в себя слуховую стимуляцию посредством костной проводимости, вестибулярную стимуляцию посредством костной проводимости, тактильную стимуляцию кожи и вибраторную проприоцептивную стимуляцию.
[0022] Колебания электромеханического устройства, например, механизма звуковой катушки, имеют интенсивность, которая обычно ниже или немного выше, чем порог слышимости. Тем не менее, колебания не генерируются с интенсивностью ниже порога тактильного восприятия и, следовательно, обеспечивают пользователя тактильным ощущением, которое вызывает проприоцепцию, то есть оно информирует пользователя об области тела, где наложено электромеханическое устройство, и где также передаются колебания на кожу. И наоборот, колебания систем предшествующего уровня техники имеют интенсивность, намного превышающую порог слышимости, поскольку они предназначены для того, чтобы заставить пользователя слышать звук, противоположный по фазе симптомам тиннитуса, или который должен охватывать симптомы тиннитуса. По этой причине, в таких системах предшествующего уровня техники проприоцепция экранируется излучаемым звуком.
[0023] Применительно к настоящему изобретению, пациент, фактически, не слышит никакого звука, исходящего от электромеханического устройства, поэтому проприоцепция играет наиболее важную роль. Другими словами, пациент тактильно воспринимает легкую вибрацию на своей коже, локализует ее (проприоцепция), и в то же время колебания передаются к костям головы, в непосредственной близости к области кожи, куда передаются колебания, то есть распространяется посредством костной проводимости, и, наконец, достигает слухового аппарата (вестибулярная стимуляция). Считается, что комбинация мультисенсорной стимуляции с определенной оптимальной частотой подавления симптомов тиннитуса, которая определяется пользователем, то есть комбинация двух основных характеристик изобретения, отличающих его от предшествующего уровня техники, позволяет получить терапевтический эффект подавления симптомов тиннитуса.
[0024] Кроме того, благодаря частоте сканирования, выполняемого во время стимуляции посредством костной проводимости, в соответствии с настоящим изобретением, нет необходимости определять или знать характерные особенности симптомов тиннитуса, в отличие от известных способов лечения. Фактически, именно пациент непосредственно выбирает стимуляцию, подходящую для подавления симптомов тиннитуса, даже если происхождение или параметры, характеризующие симптомы тиннитуса, неизвестны.
[0025] Прежде всего, преимущество устройства состоит в том, что было замечено, если пациент останавливает колебания после первого применения колебаний в течение нескольких часов, в течение которого он/она получает механические колебания с постоянной частотой, которая наилучшим образом смягчает симптомы тиннитуса, симптомы тиннитуса дополнительно уменьшаются в течение первого периода времени отсутствия шумов при тиннитусе, и, следовательно, может отключить колебания на время ожидания. Когда симптомы тиннитуса снова проявляются, пользователь должен просто начать второй этап применения колебаний на стационарной частоте, таким образом, время ожидания колебаний предпочтительно выбирается равным времени отсутствия шумов при тиннитусе, при этом второй этап применения колебаний поддерживается в течение второго периода времени колебаний и прекращается и отключается до тех пор, пока симптомы тиннитуса не проявятся снова, после второго времени отсутствия шумов при тиннитусе, более продолжительного, чем первый период времени отсутствия шумов при тиннитусе, и так далее. Фактически, было замечено, что если время колебаний и время ожидания при применении устройства согласно настоящего изобретения являются цикличными, время отсутствия шумов при тиннитусе всегда увеличивается, что показывает терапевтическую эффективность устройства.
[0026] Кроме того, система является настраиваемой индивидуально и простой в использовании, поскольку электромеханическое устройство может передавать механические колебания с различными частотами в ткани, расположенные вблизи уха пользователя, а пользователь может регулировать эти механические колебания с помощью интерфейса ввода.
[0027] Фактически, пользователь может легко проводить терапевтические сеансы в соответствии с его/ее потребностями с помощью персонального мобильного коммуникационного устройства, снабженного графическим дисплеем с сенсорным экраном, например, с помощью смартфона, в котором установлено мобильное приложение. Следовательно, пользователю не нужна какая-либо помощь со стороны терапевта.
[0028] В качестве альтернативы, элементом ввода может быть ПК, умные часы, умный телевизор или планшет. В этом случае пользователь может выполнять инструкции по запуску и остановке посредством клавиатуры, посредством устройства дистанционного управления или даже посредством устройства с сенсорным экраном.
[0029] [13] Преимущественно, устройство для наложения содержит опору, выполненную с возможностью установки рядом с костью черепа пользователя, в частности, выбранную из височной кости, затылочной кости и лобной кости, где слой кожи тоньше, и снаружи от уха, при этом опора имеет корпус для размещения, в частности, для размещения съемного электромеханического устройства. Таким образом, опора обеспечивает контакт электромеханического устройства с кожей, что позволяет использовать вышеупомянутые четыре типа стимуляции.
[0030] [14] В частности, устройство для наложения содержит клейкую подложку, содержащую:
- клеевой участок, выполненный с возможностью наложения рядом с упомянутой костью черепа;
- опорную часть, содержащую указанный корпус для размещения электромеханического устройства.
[0031] Таким образом, поскольку электромеханическое устройство выполнено с возможностью расположения в области кости и вне уха пользователя, для использования системы не требуется хирургическая операция. Это позволяет устранить риски и побочные эффекты, присущие хирургическим вмешательствам. Кроме того, поскольку электромеханическое устройство является съемным, нет необходимости постоянно носить опору. Опору можно прикрепить к пациенту, например, с помощью клея, который остается прикрепленным к коже в течение нескольких дней, в частности, столько, сколько требуется для проведения терапии, или, в любом случае, в течение нескольких дней, достаточных для нескольких замен клеевой подложки в течение всего лечения, кроме того, позволяя не носить электромеханическое устройство в промежуток времени между одним сеансом терапии и последующим сеансом.
[0031] [11] В частности, электромеханическое устройство представляет собой привод в виде звуковой катушки небольших размеров, содержащий выходной вал, который свободно перемещается в осевом направлении, в котором механическое усилие, создаваемое на валу, пропорционально силе тока, циркулирующего в своей собственной электрической катушке, и, следовательно, пропорционально интенсивности электрического воздействующего сигнала, полученного посредством блока управления, в единицу времени.
[0033] Таким образом, частота, интенсивность и форма волны механических колебаний, которые передаются к тканям в непосредственной близости от уха пользователя через выходной вал, могут быть изменены, что позволяет пользователю настраивать терапию в соответствии с его/ее потребностями.
[0034] Система в соответствии с настоящим изобретением и, в частности, привод звуковой катушки, расположенный на височной или затылочной, или передней кости, позволяет осуществлять мультисенсорную стимуляцию, при которой колебания передаются к кости через кожу по двум траекториям распространения, то есть первый путь через костную ткань, окружающую область, где применяется привод, и второй путь через жидкости и мягкие ткани вестибулярной области. Соответственно, благодаря импульсам, прикладываемым к коже, тактильное ощущение запускает проприоцептивную систему пациента, которая позволяет идентифицировать область, где стимулируется кожа. Считается, что связь мультисенсорной стимуляции с частотным сканированием для определения значения, снижающего симптомы тиннитуса, и передачей колебаний на этой частоте является причиной, по которой система, в соответствии с настоящим изобретением, может более эффективно лечить симптомы тиннитуса.
[0035] В качестве альтернативы, электромеханическое устройство может быть приводом в виде звуковой катушки, содержащим корпус в виде мембраны, который может вибрировать из-за возбуждений, вызванных силой тока, который циркулирует в катушке, окружающей этот корпус.
[0036] [11] В еще одном примерном варианте реализации настоящего изобретения, электромеханическое устройство может быть приводом пьезоэлектрического типа.
[0037] [2] Преимущественно, микроконтроллер выполнен с возможностью выполнения этапа точной настройки частоты механических колебаний после получения от пользователя инструкции остановки сканирования частоты.
[0038] В частности, после ощущения уменьшения симптомов тиннитуса на заданной частоте пользователь может взаимодействовать с устройством ввода посредством выполнения команды остановки сканирования частоты на частоте, на которой он/она ощутил уменьшение симптомов тиннитуса, то есть на вышеуказанной стационарной частоте, а затем, путем точного сканирования частот в ближайшей от стационарной частоты области, таким образом, более точно регулируя частоту, по сравнению со стационарной частотой, для дальнейшего уменьшения или подавления шума без какой-либо внешней помощи и в соответствии с его/ее собственным восприятием.
[0039] [3] Предпочтительно, микроконтроллер выполнен с возможностью осуществлять регулировку интенсивности механических колебаний при получении инструкции остановки сканирования частоты на вышеуказанной стационарной частоте.
[0040] Таким образом, регулировка интенсивности сигнала может улучшить терапию посредством использования значения интенсивности, наиболее подходящего для лечения симптомов тиннитуса.
[0041] [4] Преимущественно, микроконтроллер выполнен с возможностью регулировки интенсивности механических колебаний в конце этапа точной настройки частоты.
[0042] Таким образом, после того как первая серия механических колебаний будет доставлена на частотах в пределах первого диапазона, а затем вторая серия механических колебаний на частотах во втором диапазоне, более узком, чем первый диапазон, пользователь может выполнить третью настройку интенсивности сигнала, чтобы генерировать механические колебания электромеханического устройства, которые могут дополнительно уменьшить воспринимаемые симптомы тиннитуса.
[0043] [5] В качестве альтернативы, микроконтроллер может выполнить этап точной настройки интенсивности механических колебаний после получения команды остановки сканирования и после регулировки интенсивности механических колебаний.
[0044] Преимущество этого решения заключается в обеспечении стимуляции, более ориентированной на потребности пациента. Например, пользователь, который получил удовлетворительное уменьшение симптомов тиннитуса с помощью регулировки частоты или с помощью точной настройки частоты, может выполнить этап точной настройки интенсивности после команды остановки сканирования, что делает систему стимуляции еще более ориентированной на его/ее потребности.
[0045] [6] Преимущественно, микроконтроллер выполнен с возможностью изменения интенсивности механических колебаний, когда пользователь не ощутил никакого снижения симптомов тиннитуса в конце этапа регулировки частоты механических колебаний, то есть после сканирования всех частот в пределах предварительно заданного диапазона сканирования/регулировки. В частности, используемая стимуляция слабее, чем порог слышимости пользователя или имеет уровень интенсивности, который не может нарушать слух у пациента во время его/ее обычной деятельности.
[0046] Таким образом, пользователь, выполнив этап регулировки частоты, может принять решение об изменении интенсивности сигнала стимуляции и выполнить новый этап регулировки частоты, вызывая генерирование механических колебаний с новой интенсивностью.
[0047] [8] В частности, микроконтроллер выполнен с возможностью вызывать механические колебания, испускаемые электромеханическим устройством с интенсивностью в диапазоне от -20 дБ ПС (порога слышимости) до 200 дБ ПС.
[0048] В частности, значение предельной интенсивности, ниже которого микроконтроллер выполнен с возможностью изменения интенсивности механических колебаний, равно порогу слышимости пользователя, другими словами, микроконтроллер выполнен с возможностью вызывать механические колебания, создаваемые электромеханическим устройством с интенсивностью ниже или равной порогу слышимости.
[0049] В частности, предельное значение интенсивности, ниже которого микроконтроллер выполнен с возможностью изменения интенсивности механических колебаний, может быть равно порогу слышимости пользователя, увеличенному на 10% в дБ ПС. Более подробно, микроконтроллер выполнен с возможностью побуждать электромеханическое устройство излучать механические колебания с интенсивностью не более чем на 10% выше порога слышимости, в течение времени акклиматизации после получения инструкции начала генерирования механических колебаний, чтобы пользователь мог воспринимать создаваемые колебания как акустические колебания, а также выполнен с возможностью снижения интенсивности до значения ниже порога слышимости, по истечении времени акклиматизации.
[0050] [7] Преимущественно, электромеханическое устройство запрограммировано на автоматическую передачу механических колебаний через предварительно заданные интервалы времени.
[0051] Таким образом, могут быть получены индивидуальные программы стимулирующей терапии, в которых, например, обеспечивается доставка механических колебаний на предварительно заданных частотах в течение предварительно заданных периодов времени. Например, если по истечении времени, в течение которого устройство выключено, пользователь понимает, что симптомы тиннитуса исчезли, время в режиме ожидания устройства может быть увеличено или сокращено в том случае, если наоборот, симптомы тиннитуса возникают снова до того, как прошло время ожидания.
[0052] [12] Преимущественно, микроконтроллер выполнен с возможностью выполнения этапа регулировки формы волны механических колебаний. Эта регулировка может быть выполнена, когда пользователь не испытал какого-либо улучшения состояния во время сканирования частоты с заданной формой волны колебаний, и, следовательно, может повторить сканирование для другой формы волны.
[0053] Таким образом, с помощью системы стимуляции в соответствии с настоящим изобретением пользователь может обеспечить выполнение различных вариантов механической стимуляции для того, чтобы добиться уменьшения симптомов тиннитуса.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0054] Дополнительные характеристики и/или преимущества настоящего изобретения будут лучше понятны из последующего описания, приведенного в качестве примера варианта его реализации, а также примеров вариантов его реализации, приводимых в качестве примера, но не исчерпывающих, со ссылкой на прилагаемые графические материалы, на которых:
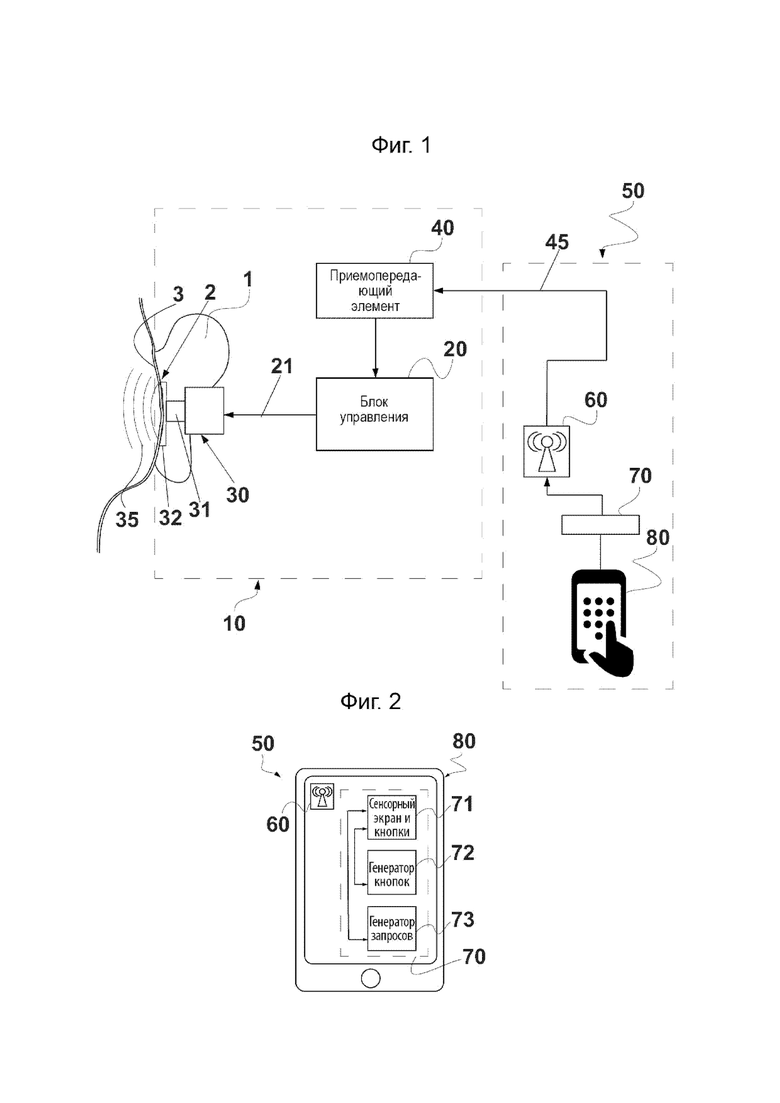
- Фиг. 1 схематически иллюстрирует пример электромеханической системы стимуляции для лечения симптомов тиннитуса, в соответствии с настоящим изобретением, содержащий проксимальный блок и интерфейс ввода, которые могут обмениваться данными друг с другом для доставки механических колебаний к тканям, расположенным в непосредственной близости к уху пользователя;
- Фиг. 2 иллюстрирует структурную схему, в соответствии с настоящим изобретением, виртуальных устройств для управления интерфейсом ввода интерфейса микроконтроллера и расположенных в устройстве ввода;
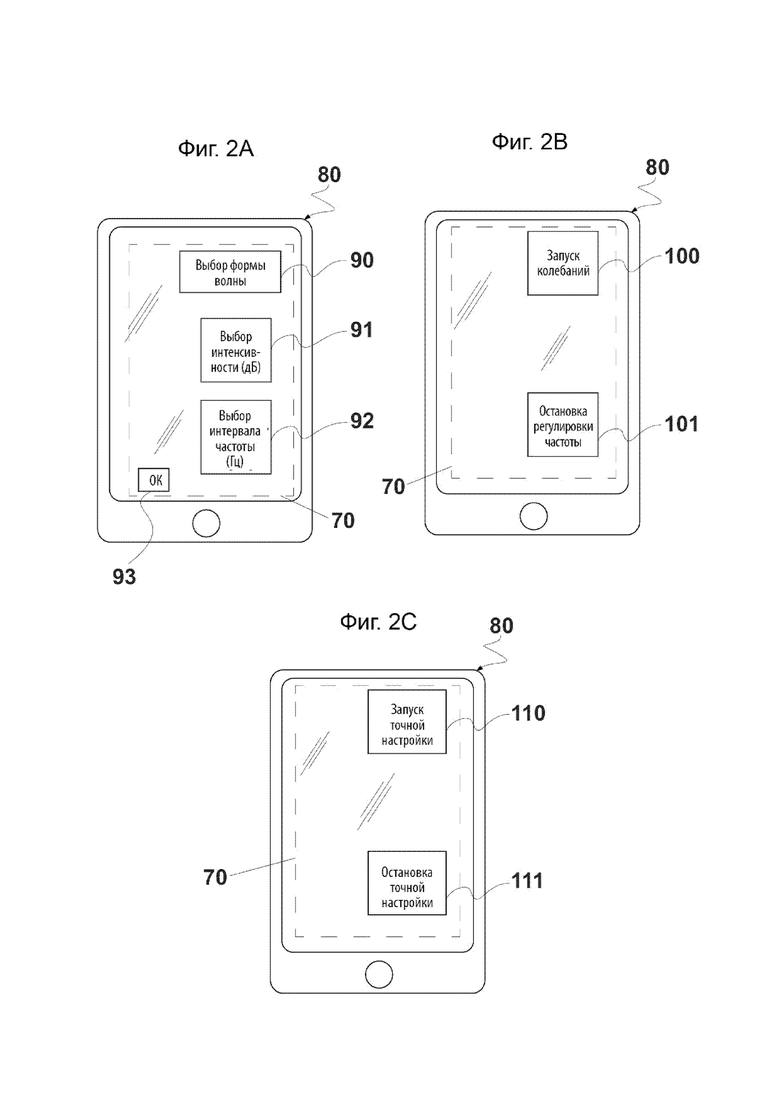
- Фиг. 2А, 2В, 2С иллюстрируют примеры экранов интерфейса микроконтроллера, в соответствии с настоящим изобретением, которые доступны в устройстве ввода;
- Фиг. 3 иллюстрирует пример блок-схемы микроконтроллера, в соответствии с настоящим изобретением, для генерирования механических колебаний с переменной частотой в предварительно заданном диапазоне;
- Фиг. 4 иллюстрирует примерную блок-схему микроконтроллера, в соответствии с настоящим изобретением, аналогичную Фиг. 3, включающую этап точной настройки частоты механических колебаний;
- Фиг. 5 иллюстрирует примерную блок-схему микроконтроллера, в соответствии с настоящим изобретением, аналогичную Фиг. 4, включающую этап регулировки интенсивности механических колебаний;
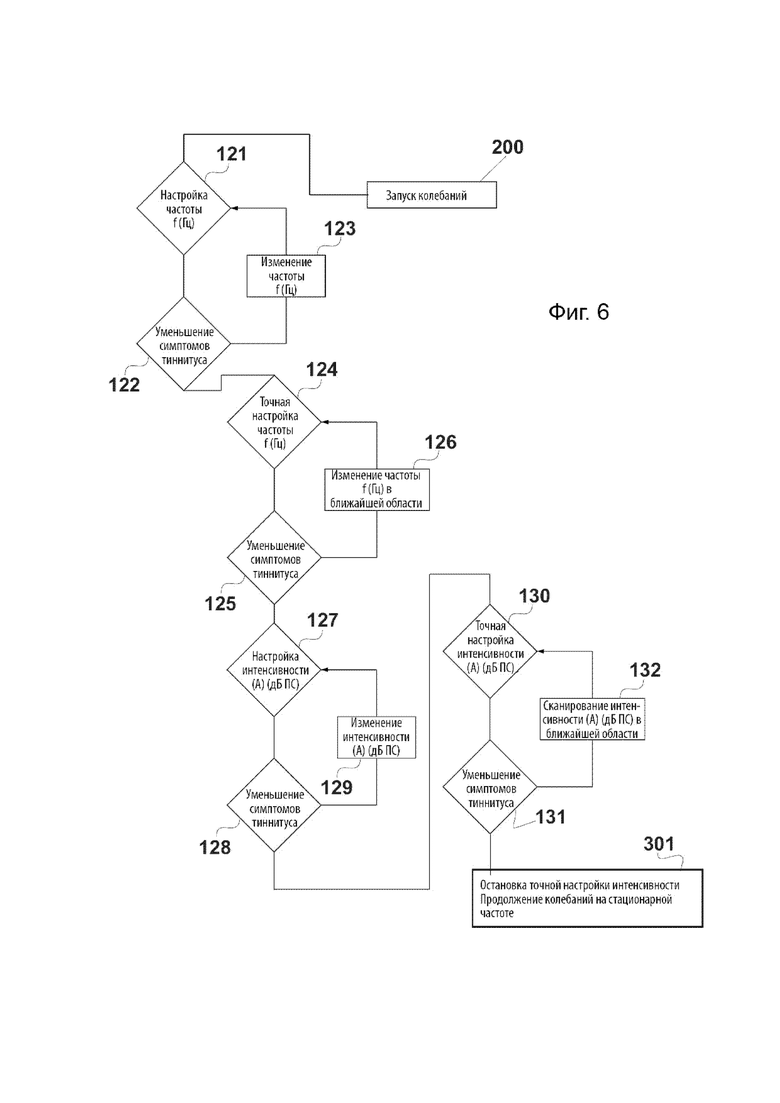
- Фиг. 6 иллюстрирует примерную блок-схему микроконтроллера, в соответствии с настоящим изобретением, аналогичную Фиг. 5, включающую этап точной настройки интенсивности;
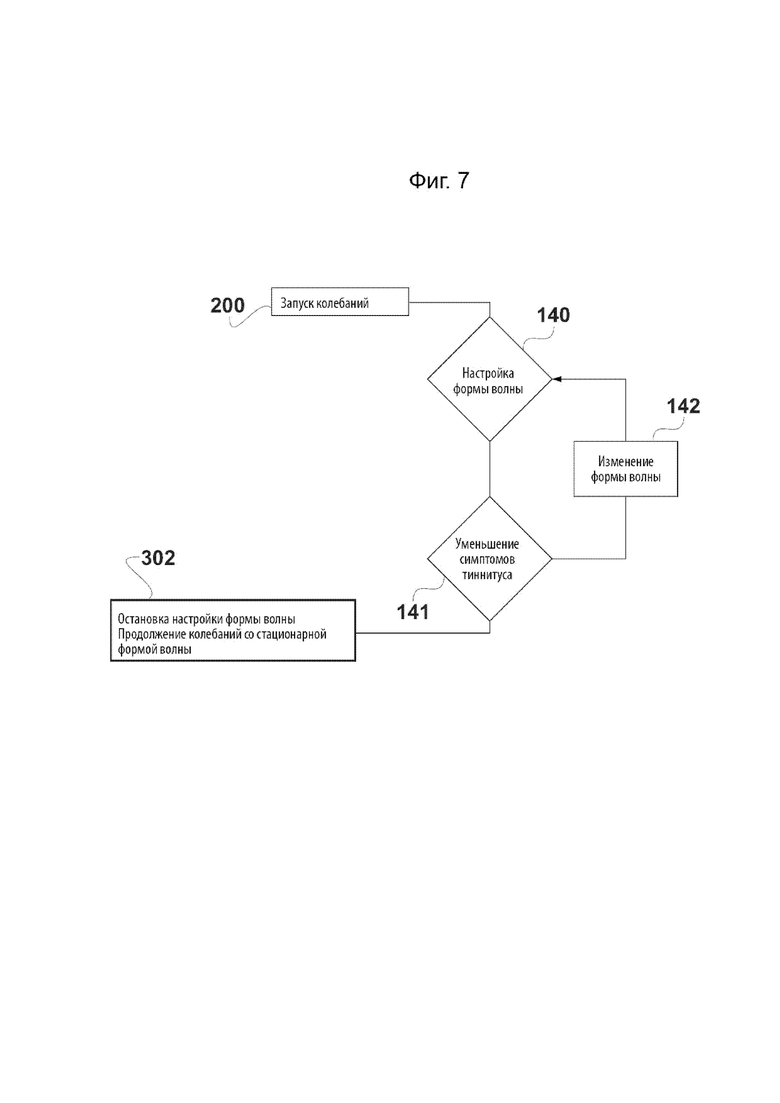
- Фиг. 7 иллюстрирует примерную блок-схему микроконтроллера, в соответствии с настоящим изобретением, включающую этап регулировки формы волны механических колебаний;
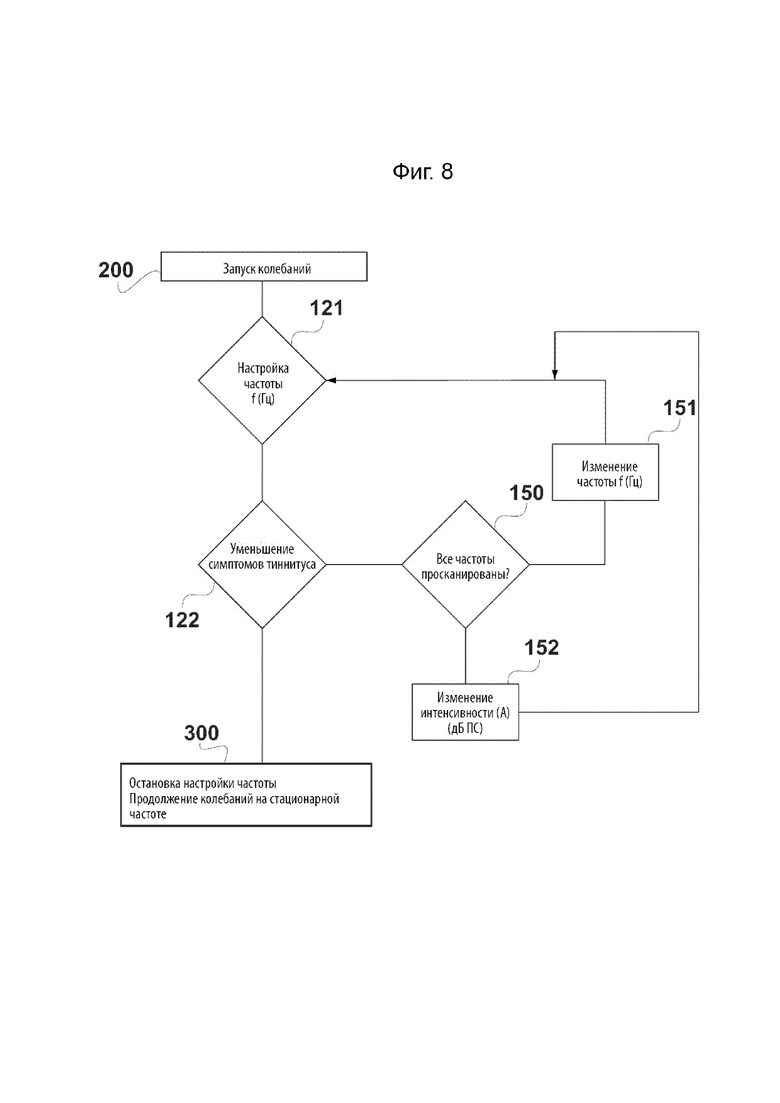
- Фиг. 8 иллюстрирует примерную блок-схему микроконтроллера, в соответствии с настоящим изобретением, включающую этап изменения интенсивности механических колебаний, если в конце этапа регулировки частоты пользователь не заметил какого-либо уменьшения симптомов тиннитуса;
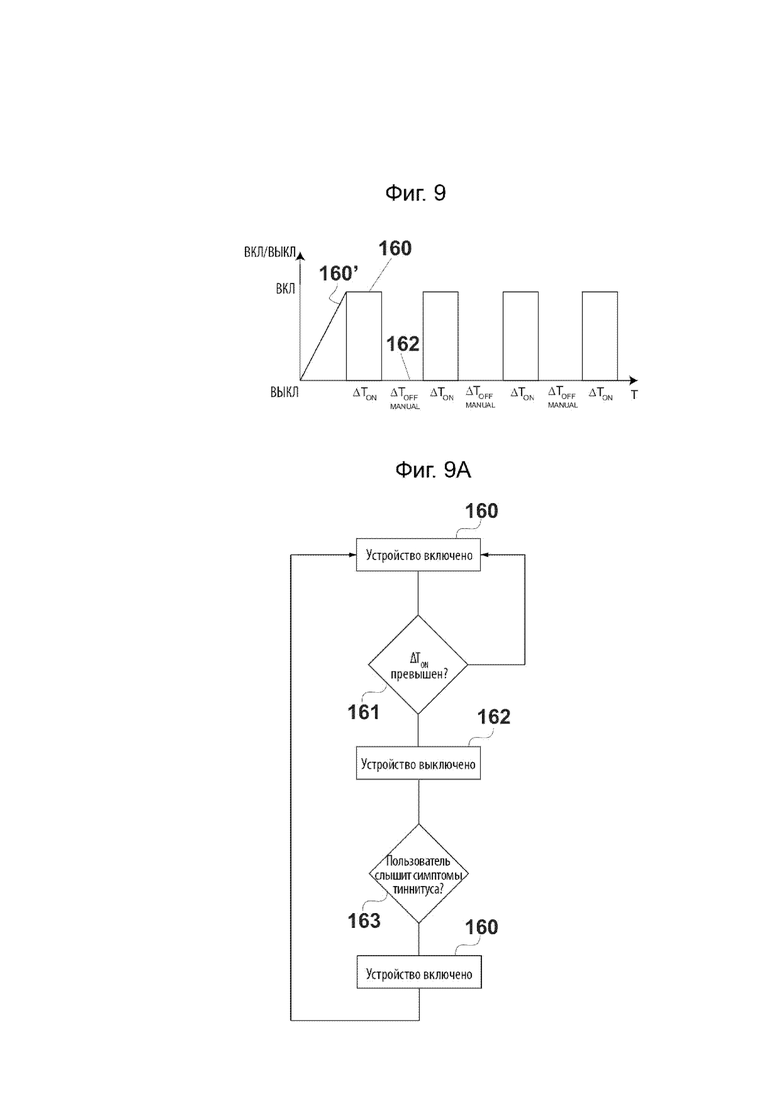
- Фиг. 9 иллюстрирует временную диаграмму работы электромеханического устройства в ручном режиме работы;
- Фиг. 9А иллюстрирует примерную блок-схему для приведения в действие схемы на Фиг. 9;
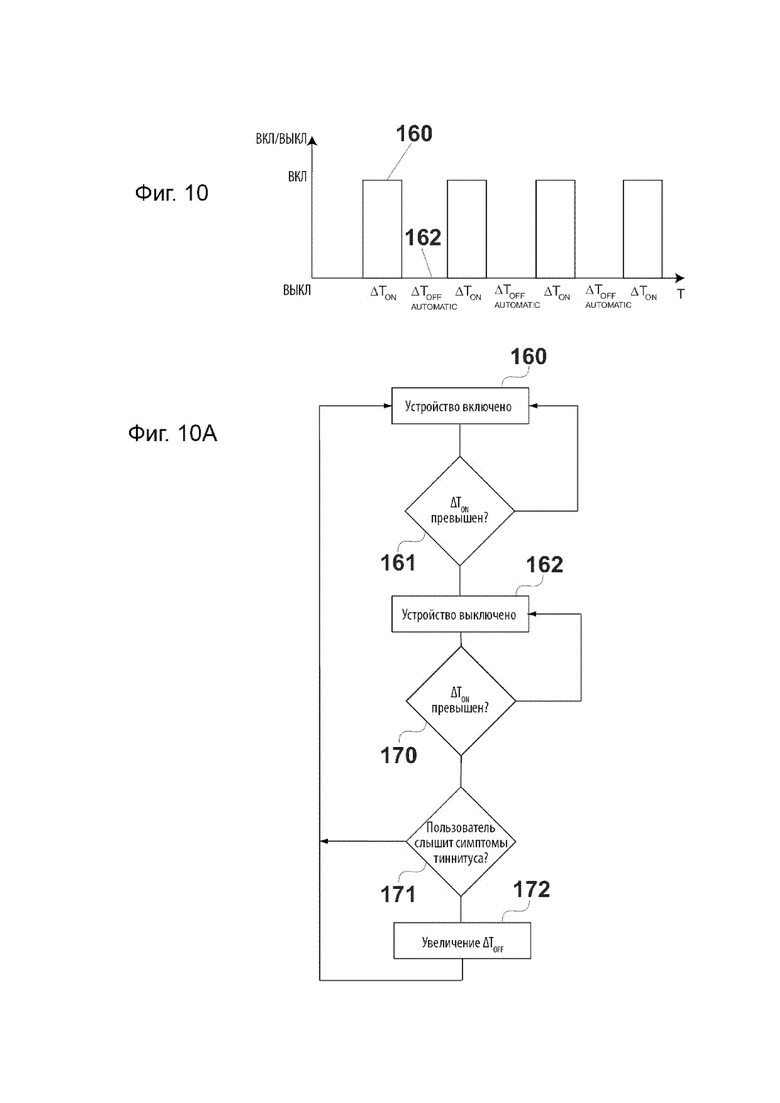
- Фиг. 10 иллюстрирует временную диаграмму работы электромеханического устройства в автоматическом режиме работы;
- Фиг. 10A иллюстрирует примерную блок-схему для приведения в действие схемы на Фиг. 10.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0055] Фиг. 1 иллюстрирует возможный пример варианта реализации системы электромеханической стимуляции для лечения симптомов тиннитуса. Система содержит проксимальный блок 10, выполненный с возможностью расположения рядом с ухом 1 пользователя, и интерфейс 50 ввода, выполненный с возможностью его работы под управлением пользователя, для обмена данными с проксимальным блоком 10.
[0056] В проиллюстрированном примере проксимальный блок 10 расположен в зоне, близкой к сосцевидному отростку, но он может быть расположен как на сосцевидных отростках, так и на лбу пользователя.
[0057] Проксимальный блок 10 содержит электромеханическое устройство 30, его устройство наложения 32, блок управления 20 и приемопередающий элемент 40, выполненный с возможностью приема сигналов 45 управления для блока управления 20.
[0058] В частности, блок 20 управления представляет собой аппаратный компонент, выполненный с возможностью генерации воздействующего сигнала 21 для электромеханического устройства 30, реагирующего на сигналы управления 45, передаваемые приемопередающим элементом 40. Частота f и интенсивность A воздействующего сигнала 21 могут быть изменены, а сигнал может иметь различные формы волны. Это позволяет использовать для каждого пациента разные параметры частоты f, интенсивности A и различные формы волны механических колебаний 35, излучаемых электромеханическим устройством 30. Блок управления 20 также позволяет комбинировать конкретные значения таких параметров воздействующего сигнала 21, при которых пользователь воспринимает остановку или уменьшение симптомов тиннитуса.
[0059] Например, блок управления 20 может быть микроконтроллером, содержащим ЦП (центральный процессор), в котором могут содержаться резидентные рабочие инструкции для генерации воздействующих сигналов 21, 45, которые должны быть переданы в электромеханическое устройство 30 таким образом, что блок управления 20 может автономно отправлять воздействующие сигналы 21 на электромеханическое устройство 30. В качестве альтернативы, блок управления 20 может иметь библиотеку воздействующих сигналов 21, которые отличаются друг от друга и могут быть сгенерированы путем передачи сигналов 45 управления от интерфейса ввода 50. В частности, блок 20 управления может быть реализован платформой Arduino, содержащей микропроцессор.
[0060] Электромеханическое устройство может быть исполнительным механизмом 30 в виде звуковой катушки, содержащий осевой подвижный выходной вал 31, в котором механическая сила, генерируемая валом 31, пропорциональна силе тока, циркулирующего в его электрической катушке, и, таким образом, интенсивности электрического воздействующего сигнала 21, обеспечиваемого блоком управления 20 в единицу времени. В соответствии с примерным вариантом реализации изобретения, который не проиллюстрирован, электромеханическое устройство 30 все еще может быть исполнительным механизмом в виде звуковой катушки, который также содержит мембрану, помимо вала 31, при этом указанная мембрана свободна вибрировать в ответ на возбуждение, вызванное током, циркулирующим в катушке исполнительного механизма. В дополнительном примерном варианте реализации настоящего изобретения, который не проиллюстрирован, электромеханическое устройство 30 может представлять собой пьезоэлектрический исполнительный механизм.
[0061] Электромеханическое устройство 30 выполнено с возможностью доставки механических колебаний 35 к тканям возле уха 1 пользователя через подвижный элемент, например, вал 31 или мембрану исполнительного механизма звуковой катушки, которая доставляет механические колебания 35 к тканям 2 вблизи уха 1 пользователя. Частота f, интенсивность A и форма волны механических колебаний 35 могут быть отрегулированы так, чтобы пользователь мог настроить терапию в соответствии с его/ее потребностями.
[0062] Устройство 32 для наложения выполнено с возможностью поддержания электромеханического устройства 30, в частности также всего проксимального блока 10, в контакте с внешними тканями, такими как кожа 2 на выступающей кости 3 головы, например, височной костью, в частности, сосцевидным отростком или сосцевидным отростком апофиза 3, затылочной костью или даже лобной костью, при этом последняя не проиллюстрирована. В частности, устройство 32 для наложения содержит опору, выполненную с возможностью установки на указанной выше выступающей кости 3 и имеет корпус для размещения электромеханического устройства 30, предпочтительно съемным способом. Опора может иметь клеевую часть для прикрепления к коже 2 и опорную часть, которая может быть съемной относительно клеевой части, содержащей корпус для размещения электромеханического устройства 30. Это устройство для наложения настроено таким образом, что усилие, требуемое для удаления электромеханического устройства 30 из опорного участка и/или опорной части от клеевой части слабее, чем усилие, необходимое для отделения клеевой части от кожи пациента 2. Подробное описание этого устройства не приводится, поскольку специалист может легко его реализовать.
[0063] Интерфейс ввода 50 содержит передающий элемент 60, микроконтроллер 70 и устройство ввода 80.
Микроконтроллер 70 выполнен с возможностью приведения в действие генерации механических колебаний 35, имеющих множество частот f, установленных в заданном диапазоне, посредством излучения воздействующего сигнала 45. Более подробно, воздействующий сигнал 21, 45 выполнен с возможностью вызывать приведение в действие электромеханического устройства 30 блоком 20 управления на предварительно определенной частоте f, установленной в диапазоне от 20 Гц до 20 кГц, в частности в таком более узком диапазоне, например 125 Гц ÷ 8000 Гц. Микроконтроллер 70 также может вызывать повторение множества частот этого диапазона в качестве частот воздействия.
[0065] Устройство 80 ввода выполнено с возможностью получения инструкций от пользователя, в частности инструкции для запуска этапа 200 (Фиг. 3-8) доставки механических колебаний, причем указанная инструкция также запускает этап 121 изменения или регулировки частоты f механических колебаний 35, который заключается в изменении этого параметра, начиная с предварительно заданного значения. Устройство 80 ввода также выполнено с возможностью ожидания и получения от пользователя инструкции 300 остановки сканирования частоты на этапе 121 регулировки частоты, когда пользователь воспринимает значительное уменьшение или остановку симптомов тиннитуса, а также выполнено с возможностью продолжения генерирования колебаний 35 в течение предварительно заданного времени при сохранении неизменной частоты на значении, используемом при вводе команды остановки сканирования частоты, когда этап регулировки частоты f механических колебаний 35 прекращается.
[0066] Другие команды запуска/остановки могут передаваться устройством 80 ввода, как будет объяснено при описании некоторых примерных вариантов реализации системы со ссылкой на Фиг. 3-8.
[0067] Микроконтроллер 70 может быть интегрирован с устройством ввода 80 в одном устройстве. Например, устройство ввода 80 может представлять собой смартфон, планшет, ПК, умный телевизор или умные часы. В этих случаях микроконтроллер 70 определяет «мобильное приложение», которое можно запустить на устройстве ввода 80, на котором оно установлено. В качестве альтернативы, устройством ввода 80 может быть ПК. В этом случае микроконтроллер 70 определяет программное обеспечение, установленное на ПК.
[0068] Передающий элемент 60, который выполнен с возможностью передачи управляющих сигналов 45, генерируемых микроконтроллером 70, на приемопередающий элемент 40, представляющий собой антенну Bluetooth, которая находится внутри или снаружи устройства ввода 80.
[0069] В качестве альтернативы, в других примерных вариантах реализации настоящего изобретения, которые не проиллюстрированы, передача управляющих сигналов 45 от устройств интерфейса/ввода 50, 80 на проксимальный блок может происходить другим способом, например, это может быть передача по кабелю.
[0070] На Фиг. 2 проиллюстрирована возможная схема последовательности операций, в которой виртуальные устройства 71, 72, 73 выполнены с возможностью управления интерфейсом ввода 50 микроконтроллера 70 и установлены в устройстве ввода 80. В частности, в примере, проиллюстрированном на Фиг. 2, устройство ввода 80 представляет собой персональное мобильное коммуникационное устройство, например, выбранное из вышеуказанных типов, в котором графический интерфейс управляется тремя основными виртуальными блоками, то есть генератором 73 запросов, генератором 72 кнопок и виртуальным устройством 71 с сенсорным экраном. В этом случае передающий элемент 60 для передачи сигналов управления представляет собой антенну Bluetooth, также встроенную в устройство ввода 80.
[0071] На Фиг. 2А проиллюстрирован пример экрана интерфейса микроконтроллера 70, который определяет «мобильное приложение», установленное в устройстве ввода 80, как правило, если последний представляет собой персональное мобильное коммуникационное устройство.
[0072] После установки приложения на устройство ввода 80 пользователь может выбрать параметры формы волны 90, интенсивности 91 и частотного диапазона 92, с которыми/внутри которого должны генерироваться механические колебания 35. Этап 93 подтверждения операции позволяет пользователю просматривать следующий экран, проиллюстрированный на Фиг. 2В, и вводить инструкции для запуска генерации и передачи механических колебаний 35 и регулировки по меньшей мере частоты этих механических колебаний с помощью кнопки 100 запуска. Как и ожидалось, и как это будет лучше описано в дальнейшем, пользователь может остановить этап 121 регулировки частоты с помощью экранной кнопки 101 остановки, в частности, если он/она ощущает уменьшение симптомов тиннитуса.
[0073] На Фиг. 2С проиллюстрирован примерный экран интерфейса микроконтроллера 70, следующий за экраном на Фиг. 2B в примерном варианте реализации системы, описанном ниже. После команды 101 остановки сканирования частоты этот экран позволяет оператору вводить команду 110 запуска этапа точной настройки f частоты воздействующего сигнала 45 и этапа 111 остановки этапа точной настройки.
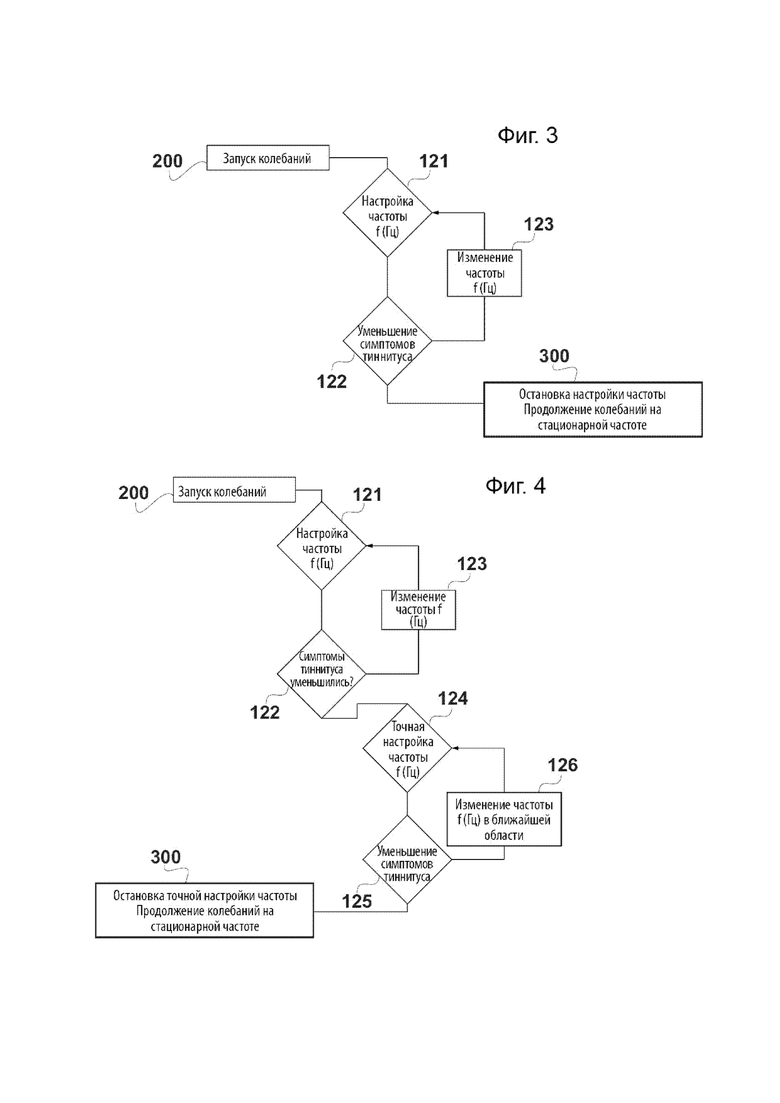
[0074] Фиг. 3 иллюстрирует блок-схему работы микроконтроллера 70 для генерации механических колебаний 35. Инструкция пользователя вызывает этап 200 генерирования механических колебаний 35 и, в то же время, этап 121 регулировки частоты f для запуска.
[0075] Этап регулировки частоты f механических колебаний 35 обеспечивает выполнение этапа изменения частоты колебаний 35, которые доставляются при сканировании предварительно заданного диапазона частот f, в предварительно заданные интервалы времени, которые могут быть выбраны пользователем.
[0076] Если пользователь ощущает уменьшение 122 симптомов тиннитуса, он/она может ввести инструкцию остановки сканирования частоты посредством устройства ввода 80. Это событие вызывает прерывание 300 сканирования частоты 121 на значении частоты, при котором доставлялись механические колебания 35, когда была введена команда остановки, а стимуляция, то есть доставка колебаний 35, продолжается с фиксированным значением частоты, равным частоте снижения симптомов тиннитуса, которая определяется, как описано выше.
[0077] Напротив, если пользователь не ощущает какого-либо значительного уменьшения 122 симптомов тиннитуса при отсутствии команды остановки сканирования частоты, подача механических колебаний 35 продолжается с этапа 123 изменения сканируемого диапазона частот, и с нового этапа 121 регулировки частоты, где частота f изменяется в диапазоне частот, отличном от диапазона, сканированного ранее. Этап выполняется таким образом с различными этапами 121 регулировки частоты, при условии, что пользователь не ощущает какого-либо значительного уменьшения 122 симптомов тиннитуса.
[0078] На Фиг. 4 проиллюстрирована блок-схема работы микроконтроллера 70, аналогичная проиллюстрированной на Фиг. 3, примерного варианта осуществления системы, в которой дополнительно предусмотрен этап 124 точной настройки частоты f воздействующего сигнала 45 и, следовательно, доставки механических колебаний 35.
[0079] В этом случае, при отсутствии команды остановки сканирования частоты на этапе 121 регулировки частоты, микроконтроллер 70 действует так же, как на Фиг. 3, посредством этапа 123 изменения сканируемого диапазона частот, и с новой генерацией механических колебаний 35 вместе с этапом 121 регулировки частоты f путем сканирования другого частотного диапазона.
Напротив, если пользователь, в то время как механические колебания 35 доставляются с частотой f, установленной в заданном диапазоне, воспринимает значительное уменьшение 122 симптомов тиннитуса, он/она может уведомить об этом событии микроконтроллер 70, который выполняет этап 124 точной настройки частоты f. Другими словами, микроконтроллер 70 сужает диапазон частот для сканирования при доставке последующих механических колебаний 35, то есть он выбирает новый диапазон частот f, который находится в ближайшей области значения частоты, при котором уменьшение симптомов тиннитуса было воспринято и зарегистрировано, и продолжает новый этап настройки, на этот раз - этап точной настройки частоты f, побуждающий последний сканировать эту ближайшую область.
Если пользователем ощущается дальнейшее уменьшение симптомов тиннитуса 125, последний может предоставить команду остановки сканирования частоты для этапа точной настройки, чтобы вызвать остановку 300 точной настройки 124 частоты на значении, при котором доставлялись механические колебания 35, когда была введена эта команда остановки сканирования, а стимуляция, то есть доставка колебаний 35, продолжается с фиксированным значением частоты, равным дополнительной частоте уменьшения симптомов тиннитуса, которая идентифицируется, как описано выше.
Напротив, если пользователь не видит дальнейшего значительного уменьшения 125 симптомов тиннитуса при отсутствии инструкции остановки сканирования частоты для этапа точной настройки, доставка механических колебаний 35 продолжается с этапа 126 изменения сканируемой ближайшей области частоты, как новой ближайшей области для значения, которое вызвало предыдущее уменьшение, и с этапа 124 точной настройки частоты f путем сканирования этой новой ближайшей области. Этап продолжается таким образом с новыми этапами точной настройки 124 частоты, пока пользователь не обнаружит какого-либо значительного уменьшения 125 симптомов тиннитуса.
[0080] Таким образом, пользователь может более точно определить частоту, при которой происходит дальнейшее уменьшение 125 симптомов тиннитуса, то есть он/она может проверить частоту или частоты, наиболее близкие к частоте фантомного шума, таким образом, улучшая процесс его снижения.
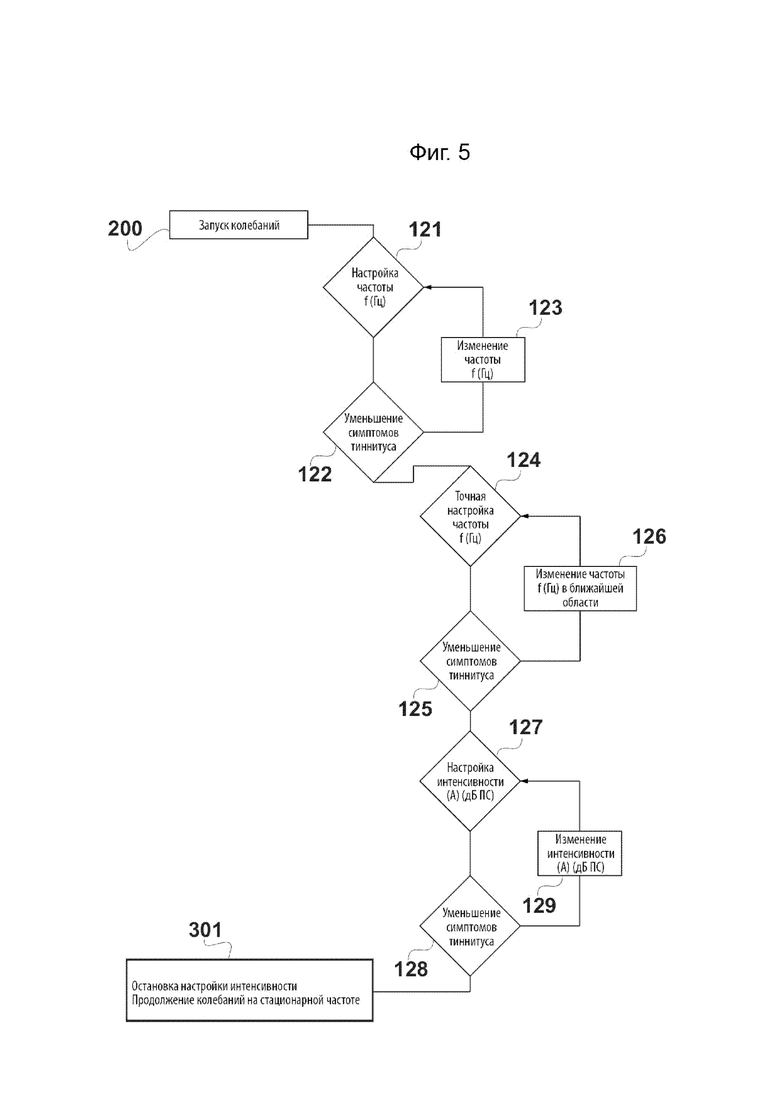
[0081] На Фиг. 5 проиллюстрирована блок-схема работы микроконтроллера 70, аналогичная схеме, проиллюстрированной на Фиг. 4, в примерном варианте реализации системы, в которой дополнительно предусмотрен этап 127 для регулировки интенсивности воздействующего сигнала 45 и, следовательно, выполнения доставки механических колебаний 35.
При отсутствии команды остановки сканирования частоты микроконтроллер 70 работает так же, как на Фиг. 4.
Напротив, если в то время как механические колебания 35 доставляются с частотой f, установленной в заданной ближайшей области значения, снижающего симптомы тиннитуса, пользователь воспринимает его дальнейшее уменьшение, он/она может уведомить об этом событии микроконтроллер 70, который выполняет этап 127 регулировки интенсивности воздействующего сигнала 45 и, следовательно, доставки механических колебаний 35.
Этот этап 127 регулировки интенсивности А механических колебаний 35 обеспечивает этап изменения интенсивности А колебаний 35, доставляемых путем сканирования предварительно заданного диапазона интенсивности А в соответствии с предварительно заданными уровнями увеличения и уменьшения, которые могут быть выбраны пользователем.
Если пользователь ощущает дальнейшее уменьшение симптомов тиннитуса 128, он может предоставить команду остановки сканирования интенсивности, чтобы вызвать остановку 301 регулировки 127 интенсивности А на значении, при котором доставлялись механические колебания 35, когда была введена эта инструкция остановки сканирования, а стимуляция, то есть доставка колебаний 35, продолжается с фиксированным значением интенсивности, равным интенсивности уменьшения симптомов тиннитуса, которая идентифицируется, как описано выше.
Напротив, если пользователь не видит дальнейшего значительного уменьшения 128 симптомов тиннитуса при отсутствии команды остановки сканирования интенсивности, доставка механических колебаний 35 продолжается с этапа 129 изменения диапазона интенсивности, подлежащего сканированию, и с новым этапом 127 регулировки интенсивности, в котором интенсивность A изменяется в пределах диапазона интенсивности, отличного от сканированного ранее диапазона. Этап выполняется таким образом с этапами 127 регулировки интенсивности до тех пор, пока пользователь не почувствует какого-либо дальнейшего значительного уменьшения 128 симптомов тиннитуса.
[0082] На Фиг. 6 показана блок-схема работы микроконтроллера 70, аналогичная схеме на Фиг. 5 в примерном варианте реализации системы, в которой дополнительно предусмотрен этап 130 точной настройки интенсивности воздействующего сигнала 45 и, следовательно, доставляемых механических колебаний 35.
[0083] В этом случае, при отсутствии команды остановки сканирования интенсивности для этапа 127 регулировки интенсивности А, микроконтроллер 70 работает так же, как на Фиг. 5.
Напротив, если в то время как механические колебания 35 доставляются с интенсивностью А, установленной в заданном диапазоне, пользователь воспринимает значительное уменьшение симптомов тиннитуса 128, он/она может уведомить об этом событии микроконтроллер 70, который выполняет этап 130 точной настройка интенсивности А. Другими словами, микроконтроллер 70 сужает диапазон интенсивности, подлежащий сканированию при доставке последующих механических колебаний 35, то есть он выбирает диапазон интенсивности, который является ближайшей областью значения А интенсивности, при котором воспринимается и регистрируется уменьшение симптомов тиннитуса, и переходит к этапу настройки, на этот раз к этапу точной настройки интенсивности А, заставляя последний сканировать эту ближайшую область.
Если пользователь ощущает дальнейшее уменьшение симптомов тиннитуса 131, последний может предоставить команду остановки сканирования интенсивности для этапа точной настройки, чтобы вызвать остановку 301 точной настройки 130 интенсивности на значении, при котором доставлялись механические колебания 35, когда была введена эта команда остановки сканирования, а стимуляция, то есть доставка колебаний 35, продолжается с фиксированным значением интенсивности, равным дополнительной интенсивности, снижающей симптомы тиннитуса, которая идентифицируется, как описано выше.
Напротив, если пользователь не видит дальнейшего значительного уменьшения 131 симптомов тиннитуса при отсутствии инструкции остановки сканирования для этапа точной настройки интенсивности, генерирование механических колебаний 35 продолжается с этапом 132 изменения диапазона интенсивности А, который будет сканироваться как новая ближайшая область значения, вызвавшего предыдущее уменьшение, и с шагом 130 точной настройки интенсивности A путем сканирования этой новой ближайшей области. Этап выполняется таким образом с новыми этапами точной настройки 130 интенсивности, при условии, что пользователь не ощущает какого-либо значительного уменьшения 131 симптомов тиннитуса.
[0084] В примерном варианте реализации системы, который не проиллюстрирован на схемах, описанных выше, но который может быть легко получен из них, может быть предусмотрен этап регулировки или сканирования интенсивности A, и, предпочтительно, также этап точной настройки, то есть точной настройки интенсивности A без выполнения этапа точной настройки или точной регулировки частоты воздействующего сигнала 45 и, следовательно, механических колебаний 35.
[0085] На Фиг. 7 проиллюстрирована блок-схема последовательности операций работы микроконтроллера 70 в примерном варианте реализации системы, включающем в себя этап 140 регулировки формы волны воздействующего сигнала 45 и, следовательно, механических колебаний 35. В этом случае инструкция пользователя запускает этап 200 генерирования механических колебаний 35, который начинается одновременно с этапом регулировки частоты и включает в себя этап сканирования предварительно заданного диапазона частот f, который может быть выбран пользователем. Перед этой настройкой частоты или на каждом этапе сканирования частоты микроконтроллер 70 может выполнить этап 140 регулировки формы волны, выбрав форму волны из заранее определенной библиотеки, которая находится в интерфейсе ввода 50, для генерации механических колебаний. Более подробно, в первом случае, если пользователь не ощущает какого-либо значительного уменьшения 141 симптомов тиннитуса, предоставляется этап 142 изменения типа формы волны, пока не будет получен желаемый эффект уменьшения симптомов тиннитуса 141. Затем пользователь может уведомить об этом событии микроконтроллер 70, предоставив команду остановки сканирования для регулировки формы волны, чтобы вызвать остановку 302 этапа 140 сканирования типов формы волны на таком типе, с которым доставлялись механические колебания 35 при вводе этой инструкции остановки, а стимуляция, то есть доставка колебаний 35, продолжается с этим типом формы волны.
[0086] Диаграмма на Фиг. 8 относится к модификации системы, в которой предусмотрена возможность изменения интенсивности воздействующего сигнала 45 и, следовательно, механических колебаний 35, если после генерирования механических колебаний 35 и после изменения их частоты посредством полного сканирования предварительно заданного частотного диапазона, пользователь не заметил какого-либо значительного уменьшения симптомов тиннитуса. В этом случае, если не получено уменьшение 122 симптомов тиннитуса после предоставления инструкции для запуска этапа 200 генерирования механических вибраций 35 и одновременного этапа 121 регулировки их частоты, пользователь может запустить изменение интенсивности сигнала 152 и обеспечить продолжение генерации 200 механических колебаний 35 посредством запуска нового этапа 121 регулировки частоты с использованием нового значение интенсивности, а затем он/она может остановить эту настройку частоты механических колебаний 35, посредством ввода команды остановки сканирования частоты, при ощущении значительного уменьшения 122 симптомов тиннитуса. Если после первого этапа 121 регулировки частоты механических колебаний 35 пользователь не ощущает какого-либо значительного уменьшения симптомов тиннитуса, и если этап 150 проверки обнаруживает, что частотный диапазон не был полностью просканирован, предоставляется этап 151 изменения частоты f диапазона механических колебаний 35.
[0087] В частности, микроконтроллер 70 выполнен с возможностью доставки колебаний 35 с интенсивностью ниже, чем порог слышимости пациента. В примерном варианте реализации изобретения, который не проиллюстрирован, этап акклиматизации предоставляется в начале этапа 200 доставки механических колебаний, то есть сразу после получения команды его запуска, а микроконтроллер 70 выполнен с возможностью доставки колебаний 35, интенсивность которых выше не более чем на 10% от абсолютного значения в дБ ПС порога слышимости пациента, чтобы помочь пациенту идентифицировать механические колебания 35, генерируемые электромеханическим устройством 30.
[0088] Фиг. 9 представляет собой диаграмму, иллюстрирующую период доставки ON и период времени ожидания OFF электромеханического устройства 30 в ручном режиме работы. Более подробно, определены временные интервалы 160 доставки (ΔTON), 160', а также временные интервалы 162 ожидания (ΔTOFF MANUAL) электромеханического устройства 30, которые пользователь может выбирать в соответствии со своими потребностями с помощью предоставления инструкций через устройство ввода 80.
[0089] Фиг. 9A представляет собой пример блок-схемы работы электромеханического устройства 30 в ручном режиме работы, согласно Фиг. 9. В этом режиме пользователь предоставляет инструкции 160 включения и инструкции 162 выключения на основе своего восприятия симптомов 163 тиннитуса, и в соответствии с временными интервалами 160 доставки на основе своего собственного восприятия.
[0090] Напротив, Фиг. 10 представляет собой схему, иллюстрирующую значения доставки ON и значения периода ожидания OFF электромеханического устройства 30 в автоматическом режиме работы. В частности, электромеханическое устройство 30 может быть запрограммировано для автоматической передачи механических колебаний 35 через предварительно определенные интервалы времени, обеспечивая оба временных интервала 160 или ΔTON в течение которых электромеханическое устройство 30 работает и доставляет стимуляции на частоте f, с интенсивностью A, и с предварительно заданной формой волны, а также временные интервалы 162 в режиме ожидания, в течение которых электромеханическое устройство 30 не работает, т.е. могут быть определены временные интервалы режима ожидания (ΔTOFF AUTOMATIC).
[0091] В частности, в автоматическом режиме работы могут быть получены индивидуальные программы терапевтической стимуляции, в которых механические колебания 35 доставляются с частотами f, интенсивностями A и с предварительно заданными формами волны колебаний в течение предварительно заданных периодов времени, которые чередуются с этапами периода ожидания. В частности, если пользователь ощущает значительное уменьшение или прекращение симптомов тиннитуса после предварительно заданного интервала времени, в течение которого устройство не работает, время ожидания устройства может быть увеличено или может быть сокращено, если, наоборот, симптомы тиннитуса возникают снова во время одного из этих периодов ожидания.
[0092] На Фиг. 10А показана блок-схема работы электромеханического устройства 30 в автоматическом режиме работы. В течение интервала времени 160 доставки механических колебаний, в котором электромеханическое устройство 30 включено, система подсчитывает время 161, истекшее после начала этого интервала, и если это время превышает предварительно заданный порог времени доставки, начинается этап ожидания 162 электромеханического устройства 30. В противоположном случае, электромеханическое устройство 30 продолжает этап 160 доставки. Этап 162 ожидания электромеханического устройства 30 продолжается до тех пор, пока время 170 режима ожидания OFF не превысит запрограммированную продолжительность. Перед тем, как снова активировать электромеханическое устройство 30, чтобы начать новый этап доставки, предоставляется этап 171 запроса, на котором пользователю выдается запрос, слышит ли еще он/она симптомы тиннитуса. Если это так, начинается новый этап 160 доставки, тогда как, если симптомы тиннитуса исчезают, выполняется этап 172 продления времени ожидания.
[0093] Приведенное выше описание некоторых примеров конкретных вариантов реализации настоящего изобретения полностью раскрывает изобретение с принципиальной точки зрения таким образом, что другие специалисты, применяя текущие знания, смогут модифицировать и/или адаптировать определенные приведенные в качестве примера варианты реализации настоящего изобретения для различных применений без дополнительных исследований и без отступления от изобретения, и, соответственно, подразумевается, что такие адаптации и модификации следует считать эквивалентами определенных вариантов реализации настоящего изобретения. По этой причине, средства и материалы для реализации различных функций, описанных в настоящем документе, могут иметь различную природу без отступления от объема настоящего изобретения. Следует понимать, что фразеология или терминология, используемая в настоящем документе, предназначена для описания, а не для ограничения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛУХОВОЙ ПРИБОР | 2011 |
|
RU2544292C2 |
| УСТРОЙСТВО ОТ УКАЧИВАНИЯ | 2007 |
|
RU2479326C2 |
| СПОСОБ АКТИВНОГО ПОДАВЛЕНИЯ ТИНИТУСА | 2017 |
|
RU2726923C2 |
| СПОСОБ РЕАБИЛИТАЦИИ СЛУХА С ИСПОЛЬЗОВАНИЕМ УЛЬТРАЗВУКОВОГО ИЗЛУЧЕНИЯ | 2013 |
|
RU2539365C1 |
| СПОСОБ ОБУЧЕНИЯ ЛЮДЕЙ С НАРУШЕНИЕМ СЛУХА 1 - 4 СТЕПЕНИ И ДЕФЕКТАМИ РЕЧИ НА ТРЕНАЖЕРЕ СЛУХОРЕЧЕВОГО РАЗВИТИЯ | 2018 |
|
RU2713984C1 |
| НАПРАВЛЕННОЕ МАСКИРОВАНИЕ ЗВУКА | 2013 |
|
RU2647213C2 |
| СПОСОБ МНОГОУРОВНЕВОГО ТОНАЛЬНОГО АДАПТИВНОГО СКРИНИНГА В РАСШИРЕННОМ ДИАПАЗОНЕ ЗВУКОВЫХ ЧАСТОТ | 2024 |
|
RU2831419C1 |
| ВСПОМОГАТЕЛЬНЫЕ СЛУХОВЫЕ УСТРОЙСТВА | 2020 |
|
RU2801638C1 |
| ИМПЛАНТИРУЕМОЕ УСТРОЙСТВО СО СРЕДСТВАМИ СВЯЗИ | 2010 |
|
RU2573184C2 |
| СИСТЕМА И СПОСОБ ФОРМИРОВАНИЯ И ЗАПИСИ СТАБИЛЬНЫХ СЛУХОВЫХ РЕАКЦИЙ С ПОМОЩЬЮ РЕЧЕПОДОБНОГО СТИМУЛА | 2016 |
|
RU2725746C2 |
Заявленное изобретение относится к медицинской технике и предназначено для лечения симптомов тиннитуса. Технический результат заключается в упрощении настройки системы при отсутствии инвазивного вмешательства. Система электромеханической стимуляции содержит проксимальный блок, выполненный с возможностью размещения вблизи уха пользователя, и интерфейс ввода, выполненный с возможностью работы под управлением пользователя. Проксимальный блок содержит электромеханическое устройство, выполненное с возможностью передачи механических колебаний с заранее заданной частотой, интенсивностью и формой волны к тканям, расположенным вблизи уха пользователя; блок управления, выполненный с возможностью приведения в действие электромеханического устройства таким образом, что частота, интенсивность и форма волны механических колебаний могут быть изменены; приемопередающий элемент, предназначенный для приема сигналов управления для блока управления. Интерфейс ввода содержит передающий элемент и микроконтроллер, выполненный с возможностью испускать управляющие сигналы для генерирования механических колебаний электромеханического устройства на первой частоте от 20 Гц до 20 кГц и побуждать повторение колебаний для всего множества частот в этом диапазоне. 12 з.п. ф-лы, 15 ил.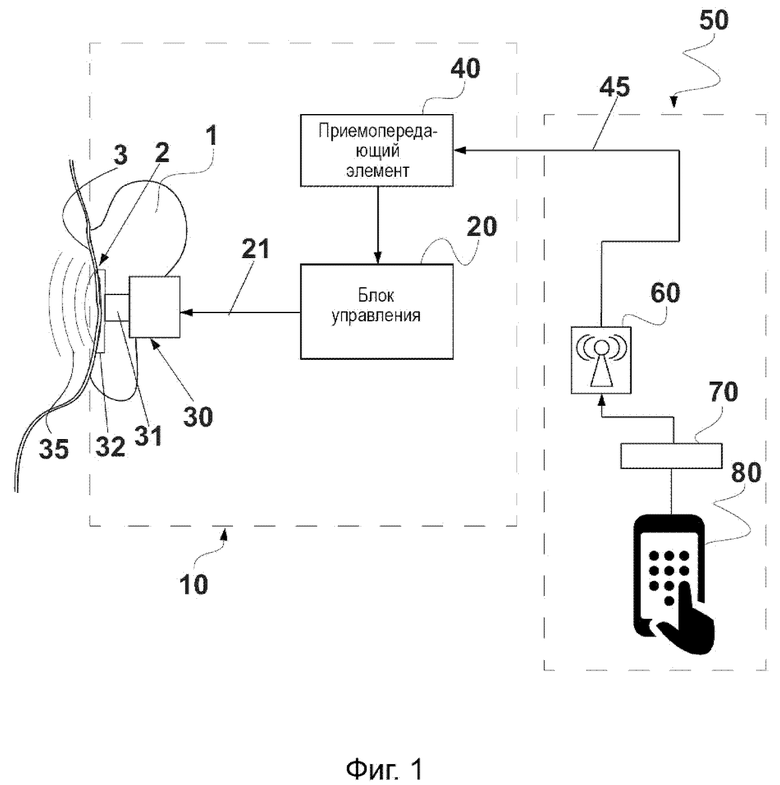
1. Система электромеханической стимуляции для лечения симптомов тиннитуса, содержащая:
- проксимальный блок (10), выполненный с возможностью размещения вблизи уха пользователя (1), причем указанный проксимальный блок (10) содержит:
- электромеханическое устройство (30), выполненное с возможностью передачи механических колебаний (35), имеющих заданную частоту (f), интенсивность (A) и форму волны, к тканям, находящимся вблизи указанного уха пользователя (1),
причем указанное электромеханическое устройство (30) представляет собой устройство, выбранное между исполнительным механизмом в виде звуковой катушки и пьезоэлектрическим исполнительным механизмом;
- устройство (32) для поддержания электромеханического устройства (30) в контакте с тканями (2), соответствующими костным отросткам (3) головы, выбранным из височной кости, в частности сосцевидного отростка; затылочной кости; лобной кости;
- блок (20) управления, выполненный с возможностью приведения в действие указанного электромеханического устройства (30) таким образом, что вышеуказанная частота (f), вышеуказанная интенсивность (A) и указанная форма волны вышеуказанных механических колебаний (35) могут быть изменены;
- приемопередающий элемент (40), выполненный с возможностью приема сигналов (45) управления для указанного блока (20) управления;
- интерфейс (50) ввода, выполненный с возможностью работы под управлением вышеуказанного пользователя и содержащий:
- передающий элемент (60), выполненный с возможностью передачи сигналов (45) управления на указанный приемопередающий элемент (40) указанного проксимального блока (10);
- микроконтроллер (70), выполненный с возможностью излучения указанных сигналов (45) управления в направлении указанного блока (20) управления для генерации механических колебаний (35) указанного электромеханического устройства (30) с первой частотой (f), установленной в диапазоне от 20 Гц до 20 кГц и с интенсивностью ниже предварительно заданного предельного значения интенсивности, и для побуждения к повторению указанных механических колебаний (35) для множества частот в указанном диапазоне;
- устройство (80) ввода, выполненное с возможностью:
- принимать от указанного пользователя инструкцию для начала генерирования указанных механических колебаний (35) посредством указанного электромеханического устройства на множестве различных частот;
- находиться в режиме ожидания;
- получать от указанного пользователя команду остановки сканирования частоты для прекращения изменения частоты указанных механических колебаний (35) на стационарной частоте, соответствующей текущей частоте генерируемых указанных механических колебаний, так, что указанный пользователь может уведомлять указанный микроконтроллер (70) о значении частоты, при котором он/она ощущает уменьшение указанных симптомов тиннитуса;
- продолжать генерировать механические колебания на стационарной частоте.
2. Система стимуляции по п.1, отличающаяся тем, что указанный микроконтроллер (70) выполнен с возможностью выполнения этапа точной настройки указанной частоты (f) указанных механических колебаний (35) после приема указанной команды остановки сканирования частоты, при этом указанный этап точной настройки включает повторение указанных механических колебаний (35) на частотах (f) в области частоты (f) одного из указанных механических колебаний (35), генерируемых при приеме указанной команды остановки сканирования частоты.
3. Система стимуляции по п.1, отличающаяся тем, что указанный микроконтроллер (70) выполнен с возможностью выполнять регулировку интенсивности (А) указанных механических колебаний (35) после приема указанной команды остановки сканирования частоты на указанной стационарной частоте.
4. Система стимуляции по п.2, отличающаяся тем, что указанный микроконтроллер (70) выполнен с возможностью выполнять регулировку интенсивности (А) указанных механических колебаний (35) в конце указанного этапа точной настройки указанной частоты (f).
5. Система стимуляции по п.1 или 3, отличающаяся тем, что указанный микроконтроллер (70) выполнен с возможностью выполнять этап точной настройки интенсивности (А) указанных механических колебаний (35) после приема указанной инструкции остановки сканирования и после указанной регулировки интенсивности (А) указанных механических колебаний (35).
6. Система стимуляции по п.1, отличающаяся тем, что указанный микроконтроллер (70) выполнен с возможностью изменения интенсивности (А) указанных механических колебаний (35) таким образом, что указанный пользователь может изменять указанную интенсивность, если не наблюдается уменьшение указанных симптомов тиннитуса в конце указанных механических колебаний (35).
7. Система стимуляции по п.1, отличающаяся тем, что указанное электромеханическое устройство (30) запрограммировано для автоматической передачи механических колебаний (35) с заранее заданными интервалами времени.
8. Система стимуляции по п.1, отличающаяся тем, что указанный микроконтроллер (70) выполнен с возможностью изменения указанных механических колебаний (35), излучаемых указанным электромеханическим устройством (30), в диапазоне интенсивности (А) от -20 дБ ПС (порога слышимости) до 200 дБ ПС.
9. Система стимуляции по п.1, отличающаяся тем, что указанный микроконтроллер (70) выполнен с возможностью изменения указанных механических колебаний (35), излучаемых указанным электромеханическим устройством (30), с интенсивностью, меньшей или равной порогу слышимости.
10. Система стимуляции по п.8, отличающаяся тем, что указанный микроконтроллер (70) выполнен с возможностью:
- побуждать указанное электромеханическое устройство (30) излучать механические колебания (35) с интенсивностью не более чем на 10% выше порога слышимости в течение времени акклиматизации после указанной инструкции начала генерирования механических колебаний (35);
- уменьшать указанную интенсивность до значения ниже, чем указанный порог слышимости после указанного времени акклиматизации.
11. Система стимуляции по п.1, отличающаяся тем, что указанный микроконтроллер (70) выполнен с возможностью выполнять этап регулировки формы волны указанных механических колебаний (35).
12. Система стимуляции по п.1, отличающаяся тем, что указанное устройство (32) для поддержания электромеханического устройства (30) в контакте с тканями (2), соответствующими костным отросткам (3) головы, содержит опору, выполненную с возможностью быть установленной рядом с костью (3) черепа пользователя, при этом указанная кость, в частности, выбрана среди височной кости, затылочной кости, лобной кости и снаружи указанного уха пользователя, а указанная опора имеет корпус для размещения, в частности для съемного размещения указанного электромеханического устройства (30).
13. Система стимуляции по п.12, отличающаяся тем, что указанная опора является клеевой опорой, содержащей:
- клеевую часть, предназначенную для нанесения рядом с указанной костью (3) черепа;
- опорный участок, содержащий указанный корпус для размещения электромеханического устройства (30), в частности, съемным способом.
| Способ установки импланта среднего уха в сочетании с мониторингом лицевого нерва | 2016 |
|
RU2616174C1 |
| US 20150164381 A1, 18.06.2015 | |||
| WO 2015020753 A2, 12.02.2015 | |||
| EP 3184046 A1, 28.06.2017 | |||
| US 20160250440 A1, 01.09.2016. | |||

