Подвес мультиспектральной камеры к дрону относится к области лесного и сельского хозяйства и может быть использован для крепления мультиспектральной камеры к беспилотному летательному аппарату (далее дрон), оснащенному «П»-образными опорными стойками, например, серии DJI Phantom 4 с целью проведения дистанционного мониторинга наземных объектов с воздуха.
Известен подвес для мультиспектральной камеры Parrot sequoia для дрона DJI Phantom 4 Pro, содержащий кронштейн камеры, кронштейн датчика, корпус батареи [Parrot Sequoia mount for Phantom 4 and Phantom 4 Pro I ZCopters. - Электронный ресурс. - Режим доступа: https://zcopters.com/en/product/parrot-sequoia-mount-for-phantom-4-and-phantom-4-pro/ (дата обращения: 15.01.2022)].
Недостатком известного подвеса является частичное перекрытие датчиков дрона вертикальной штангой подвеса и недостаточная защита объектива дорогостоящей камеры, которая сильно выступает за габариты конструкции подвеса. Еще одним недостатком является высокая трудоемкость установки и снятия конструкции подвеса на дрон, обусловленная сложностью соединения его составных частей с помощью одноразовых стяжек.
Известен подвес для мультиспектральной камеры Parrot sequoia для дрона DJI Phantom 4 Pro, содержащий кронштейн камеры, кронштейн датчика, корпус батареи [2 Axis Parrot Gimbal For Dji Phantom 4 standard. - Электронный ресурс.- Режим доступа: https://copterlab.com/2-axis-parrot-sequoia-multispectral-sensor-camera-stabilized-gimbal-for-dji-phantom-4-standard (дата обращения: 15.01.2022)].
Недостатком известного подвеса является большой вес и перекрытие датчиков дрона. Еще одним недостатком является низкая технологичность конструкции, обусловленная сложностью соединения его составных частей и сложностью установки на дрон, а также высокой трудоемкостью изготовления, связанной с необходимостью использования поддержек при изготовлении составных частей путем печати на 3D принтере.
Известен подвес для мультиспектральной камеры Parrot sequoia для дрона Phantom 4 Pro UAV [Enterprise - Parrot Sequoia mount for Phantom 4 Pro UAV by VictorEriksson - Thingiverse. - Электронный ресурс. - Режим доступа: https://www.thingiverse.com/thing:3526045 (дата обращения: 15.01.2022)] включающий корпус с поворотной площадкой для крепления камеры, стойку с площадкой для крепления антенны. Корпус является составным. Элементы корпуса соединяется друг с другом посредством использования крепежных элементов в виде винтов с гайками.
Недостатком известного подвеса является большой вес, большая трудоемкость сборки/разборки, неравномерность распределения нагрузки на летательный аппарат.
Наиболее близким по своей сущности и взятым за прототип является известный подвес для мультиспектральной камеры Parrot sequoia для беспилотного летательного аппарата DJI Phantom 4 Pro (Описание к патенту RU 2728846, заявлено 18.12.2019, опубликовано 30.07.2020), включающий передний и задний кронштейны, площадку, демпферы, корпус для камеры, крышку корпуса, стойку с площадкой для датчика. Задний кронштейн выполнен с технологическими отверстиями под датчики беспилотного летательного аппарата и пазами для крепления площадки, корпус для камеры выполнен в виде крышки с пазами и основанием под крышку, передний кронштейн со стойкой под датчик выполнен разборным, а стойка с площадкой для датчика - с пазами.
Недостатками известного подвеса для мультиспектральной камеры Parrot sequoia для беспилотного летательного аппарата DJI Phantom 4 Pro являются: сложность сборки/разборки конструкции, обусловленная большим количеством соединений и использованием дополнительных крепежных элементов в виде винтов и специального инструмента для их установки; низкая технологичность конструкции, обусловленная необходимостью использования поддержек при изготовлении ее элементов на 3D принтере; неравномерность распределения нагрузки на корпус летательного аппарата, обусловленная консольным креплением корпуса камеры к корпусу летательного аппарата.
Технический результат предлагаемого подвеса мультиспектральной камеры к дрону заключается в повышении технологичности в изготовлении, снижении трудоемкости работ по ее сборке/разборке, в более равномерном распределении нагрузки на опорные стойки дрона со стороны мультиспектральной камеры.
Технический результат достигается тем, что у подвеса мультиспектральной камеры к дрону, включающего передний кронштейн, корпус для камеры, крышку корпуса, стойку со смонтированной на ней площадкой, на двух расположенных напротив друг друга боковых стенках корпуса выполнены утолщения со сквозными отверстиями, при этом на одной из этих боковых стенок корпуса выполнен выступ, в котором выполнено глухое отверстие, внутренний диаметр которого соответствует наружному диаметру стойки, при этом в верхней части корпуса по углам выполнены цилиндрические стойки, крышка корпуса выполнена перфорированной сквозными отверстиями, причем по углам крышки соосно цилиндрическим стойкам корпуса выполнены цилиндрические бобышки с глухими отверстиями, внутренний диаметр которых соответствует наружному диаметру цилиндрических стоек корпуса, при этом в центральной части одной из боковых сторон крышки выполнен выступ со сквозным отверстием, внутренний диаметр которого соответствует наружному диаметру стойки, а по краям направляющие прямоугольные выступы, передний кронштейн выполнен с плоской верхней гранью, причем на боковой стороне выполнен выступ, в котором выполнено сквозное отверстие, внутренний диаметр которого соответствует наружному диаметру стойки, при этом в нижней части переднего кронштейна выполнены вырезы, соответствующие наружным размерам выступа со сквозным отверстием и направляющим прямоугольным выступам, выполненным на боковой стороне крышки корпуса, в сквозные отверстия утолщений боковых стенок корпуса вставлены балки с соответствующим наружным диаметром, при этом по торцам балок установлены крепежные клипсы.
На фиг. 1 представлен общий вид подвеса мультиспектральной камеры к дрону в сборе.
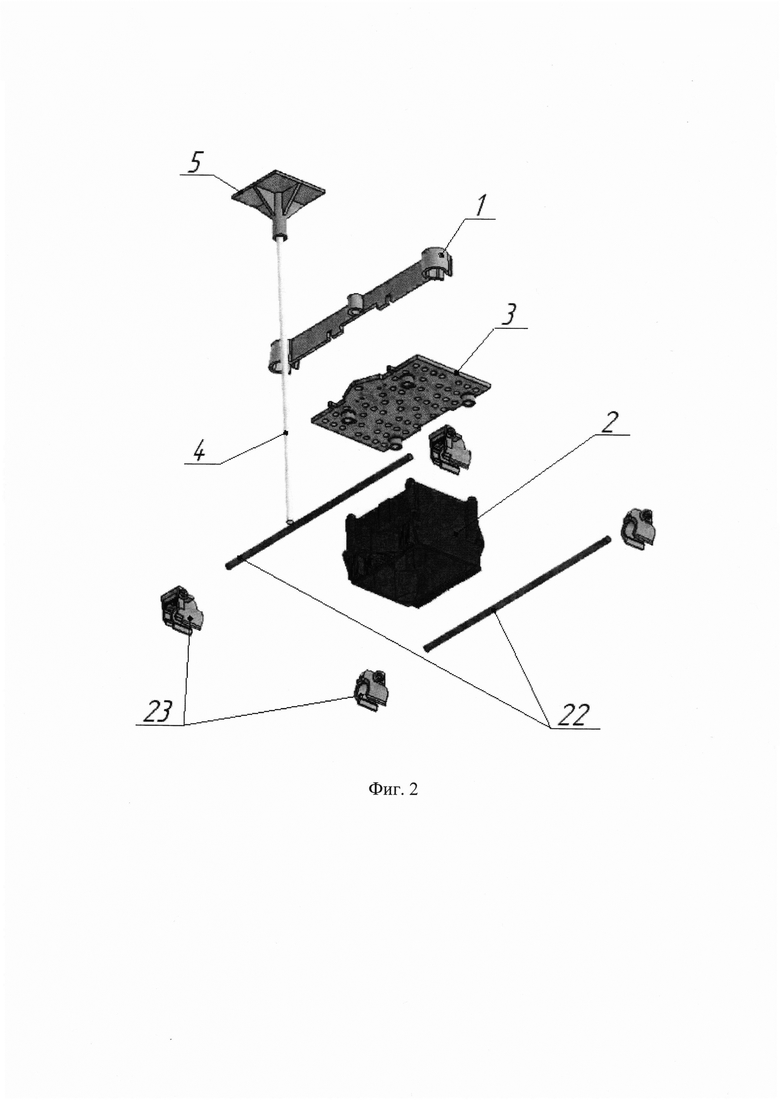
На фиг. 2 представлен общий вес подвеса мультиспектральной камеры к дрону с разнесением конструктивных элементов.
На фиг. 3 представлен общий вид корпуса камеры.
На фиг. 4 представлен общий вид крышки корпуса.
На фиг. 5 представлен общий вид переднего кронштейна.
На фиг. 6 представлен подвес мультиспектральной камеры, установленный на дрон.
Подвес мультиспектральной камеры к дрону включает передний кронштейн 1, корпус 2 для камеры, крышку 3 корпуса 2, стойку 4 со смонтированной на ней площадкой 5 под датчик освещенности.
На двух расположенных напротив друг друга боковых стенках корпуса 2 выполнены утолщения 17 со сквозными отверстиями 6. На одной из данных боковых стенок корпуса 2 выполнен выступ 7, в котором выполнено глухое отверстие 8, внутренний диаметр которого соответствует наружному диаметру стойки 4. В верхней части корпуса 2 по углам выполнены цилиндрические стойки 9.
Крышка 3 корпуса 2 выполнена перфорированной сквозными отверстиями 10. По углам крышки 3 соосно цилиндрическим стойкам 9 корпуса 2 выполнены цилиндрические бобышки 11 с глухими отверстиями 12, внутренний диаметр которых соответствует наружному диаметру цилиндрических стоек 9 корпуса 2. В центральной части одной из боковых сторон крышки 3 выполнен выступ 13 со сквозным отверстием 14, внутренний диаметр которого соответствует наружному диаметру стойки 4, а по краям направляющие прямоугольные выступы 15.
Передний кронштейн 1 выполнен с плоской верхней гранью 16, причем на боковой стороне выполнен выступ 18, в котором выполнено сквозное отверстие 19, внутренний диаметр которого соответствует наружному диаметру стойки 4. При этом в нижней части переднего кронштейна 1 выполнены вырезы 20, 21, соответствующие наружным размерам выступа 13 и направляющим прямоугольным выступам 15, выполненным на боковой стороне крышки 3 корпуса 2.
В сквозные отверстия 6 утолщений 17 боковых стенок корпуса 2 вставлены балки 22 с соответствующим наружным диаметром. По торцам балок 22 установлены крепежные клипсы 23.
Работает подвес мультиспектральной камеры к дрону следующим образом. Сборку подвеса мультиспектральной камеры к дрону начинают с установки балок 22 в сквозные отверстия 6 утолщений 17 боковых стенок корпуса 2. Затем на торцы балок 22 устанавливают крепежные клипсы 23. Внутрь корпуса 2 помещают мультиспектральную камеру (на фиг. не показано). Сверху на корпус 2 устанавливают крышку 3 таким образом, чтобы выступ 7 корпуса 2 и выступ 13 крышки 2 находились с одной стороны. Фиксируют крышку 3 на корпусе 2 путем ее прижатия таким образом, чтобы цилиндрические стойки 9, выполненные в верхней части корпуса 2 по его углам, вошли в отверстия 12 цилиндрических бобышек 11 крышки 3. Далее данная конструкция устанавливается на дрон 24 путем фиксации крепежных клипс 23 на горизонтальных участках опорных стоек дрона таким образом, чтобы выступ 7 корпуса 2 и выступ 13 крышки 2 были обращены в сторону передней части дрона. Затем на вертикальные участки опорных стоек дрона, в их передней части, устанавливается передний кронштейн 1. Передний кронштейн 1 устанавливается таким образом, чтобы выступы 13 и 15 входили в соответствующие вырезы 20, 21 нижней части крошнтейна 1. Затем в отверстие 19 выступа 18 переднего кронштейна 1, в отверстие 14 выступа 13 крышки 3, в отверстие 8 выступа 7 корпуса 1 устанавливают стойку 4 со смонтированной на ней площадкой 5. К площадке 5 крепят датчик освещенности (на фиг. не показан).
Перфорирование крышки корпуса отверстиями способствует снижению ее массы и обеспечению лучших условий вентиляции внутреннего пространства корпуса камеры.
Благодаря тому, что на двух расположенных напротив друг друга боковых стенках корпуса выполнены утолщения со сквозными отверстиями обеспечивается возможность установки в них балок, выполненных с соответствующим наружным диаметром. Наличие балок с установленными по их торцам крепежными клипсами позволяет обеспечить более равномерное распределение нагрузки на опорные стойки дрона со стороны мультиспектральной камеры, за счет замены консольного крепления, что свойственно прототипу, на двустороннюю опору.
Благодаря тому, что в верхней части корпуса по углам выполнены цилиндрические стойки, а по углам крышки соосно цилиндрическим стойкам корпуса выполнены цилиндрические бобышки с глухими отверстиями, внутренний диаметр которых соответствует наружному диаметру цилиндрических стоек корпуса, обеспечивается возможность правильного позиционирования и фиксации крышки относительно корпуса камеры без использования дополнительных крепежных элементов. Благодаря тому, что в нижней части переднего кронштейна выполнены вырезы соответствующие наружным размерам выступа со сквозным отверстием крышки и направляющим прямоугольным выступам, выполненным на боковой стороне крышки, обеспечивается правильность позиционирования, установленной на корпус камеры крышки, относительно кронштейна. Все это способствует повышению технологичности конструкции и снижению трудоемкости работ по ее сборке/разборке за счет отсутствия необходимости использования дополнительных крепежных деталей.
Благодаря тому, что на одной из боковых стенок корпуса выполнен выступ, в котором выполнено глухое отверстие, внутренний диаметр которого соответствует наружному диаметру стойки, выполнению в центральной части одной из боковых сторон крышки выступа со сквозным отверстием, внутренний диаметр которого соответствует наружному диаметру стойки, выполнению на боковой стороне переднего кронштейна выступа, в котором выполнено сквозное отверстие, внутренний диаметр которого соответствует наружному диаметру стойки, обеспечивается возможность установки в упомянутые отверстия стойки, которая обеспечивает целостность конструкции и предотвращает самопроизвольное смещение отдельных ее конструктивных элементов. Все это, а также крепление переднего кронштейна к вертикальным участкам опорных стоек дрона и балок посредством крепежных клипс к горизонтальным участкам опорных стоек дрона, обеспечивает повышение технологичности конструкции и снижение трудоемкости работ по сборке/разборке подвеса мультиспектральной камеры к дрону.
Благодаря тому, что все конструктивные элементы, в том числе и передний кронштейн, который выполнен с плоской верхней гранью имеют плоскую поверхность, которую можно использовать в качестве базовой при изготовлении кронштейна на бытовом одноструйном 3D принтере при минимальном количестве поддержек, что обеспечивает повышение технологичности конструкции в изготовлении, за счет уменьшения трудоемкости работ по ее изготовлению.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕС МУЛЬТИСПЕКТРАЛЬНОЙ КАМЕРЫ К ДРОНУ | 2022 |
|
RU2780022C1 |
| ПОДВЕС МУЛЬТИСПЕКТРАЛЬНОЙ КАМЕРЫ К ДРОНУ | 2024 |
|
RU2838711C1 |
| Подвес для мультиспектральной камеры parrot sequoia для беспилотного летательного аппарата DJI Phantom 4 Pro | 2019 |
|
RU2728846C1 |
| Подвес для мультиспектральной камеры на беспилотный летательный аппарат | 2021 |
|
RU2752037C1 |
| ОПТИЧЕСКИЙ БЛОК БУКСИРУЕМОГО УСТРОЙСТВА ДЛЯ КАРТОГРАФИРОВАНИЯ ОБЪЕКТОВ МОРСКОГО ДНА И ИХ ВИЗУАЛЬНОЙ ЗАВЕРКИ | 2018 |
|
RU2694172C1 |
| МНОГОЗАРЯДНЫЙ ГАЗОБАЛЛОННЫЙ РЕВОЛЬВЕР | 1998 |
|
RU2137082C1 |
| ПЕТЛЯ ДВЕРНАЯ | 2007 |
|
RU2353744C1 |
| Набор-конструктор для возведения опоры системы видеонаблюдения | 2020 |
|
RU2745377C1 |
| УСТРОЙСТВО ДЛЯ ВЗЯТИЯ ОБРАЗЦОВ ПОЧВЫ | 1990 |
|
RU2087707C1 |
| УНИВЕРСАЛЬНЫЙ ПРОТЕЗ ТЕЛА ПОЗВОНКА ДЛЯ ЛЕЧЕНИЯ ПЕРЕЛОМОВЫВИХОВ И СТАБИЛИЗАЦИИ ШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА И СПОСОБ РЕПОЗИЦИИ ВЫВИХА ПОЗВОНКА С ИСПОЛЬЗОВАНИЕМ ЭТОГО УСТРОЙСТВА | 2012 |
|
RU2482818C1 |





Изобретение относится к области авиации, в частности к устройствам крепления средств визуализации к беспилотным летательным аппаратам. Подвес мультиспектральной камеры к дрону включает передний кронштейн, корпус для камеры, крышку корпуса, стойку со смонтированной на ней площадкой. На двух расположенных напротив друг друга боковых стенках корпуса выполнены утолщения со сквозными отверстиями, при этом на одной из этих боковых стенок корпуса выполнен выступ, в котором выполнено глухое отверстие, внутренний диаметр которого соответствует наружному диаметру стойки. В верхней части корпуса по углам выполнены цилиндрические стойки. Крышка корпуса выполнена перфорированной сквозными отверстиями, причем по углам крышки соосно цилиндрическим стойкам корпуса выполнены цилиндрические бобышки с глухими отверстиями, внутренний диаметр которых соответствует наружному диаметру цилиндрических стоек корпуса. В сквозные отверстия утолщений боковых стенок корпуса вставлены балки с соответствующим наружным диаметром, при этом по торцам балок установлены крепежные клипсы. Обеспечивается снижение трудоемкости работ по сборке/разборке, равномерное распределение нагрузки со стороны мультиспектральной камеры на корпус дрона. 6 ил.
Подвес мультиспектральной камеры к дрону, включающий передний кронштейн, корпус для камеры, крышку корпуса, стойку со смонтированной на ней площадкой, отличающийся тем, что на двух расположенных напротив друг друга боковых стенках корпуса выполнены утолщения со сквозными отверстиями, при этом на одной из этих боковых стенок корпуса выполнен выступ, в котором выполнено глухое отверстие, внутренний диаметр которого соответствует наружному диаметру стойки, при этом в верхней части корпуса по углам выполнены цилиндрические стойки, крышка корпуса выполнена перфорированной сквозными отверстиями, причем по углам крышки соосно цилиндрическим стойкам корпуса выполнены цилиндрические бобышки с глухими отверстиями, внутренний диаметр которых соответствует наружному диаметру цилиндрических стоек корпуса, при этом в центральной части одной из боковых сторон крышки выполнен выступ со сквозным отверстием, внутренний диаметр которого соответствует наружному диаметру стойки, а по краям - направляющие прямоугольные выступы, передний кронштейн выполнен с плоской верхней гранью, причем на боковой стороне выполнен выступ, в котором выполнено сквозное отверстие, внутренний диаметр которого соответствует наружному диаметру стойки, при этом в нижней части переднего кронштейна выполнены вырезы, соответствующие наружным размерам выступа со сквозным отверстием и направляющим прямоугольным выступам, выполненным на боковой стороне крышки корпуса, в сквозные отверстия утолщений боковых стенок корпуса вставлены балки с соответствующим наружным диаметром, при этом по торцам балок установлены крепежные клипсы.
| Подвес для мультиспектральной камеры parrot sequoia для беспилотного летательного аппарата DJI Phantom 4 Pro | 2019 |
|
RU2728846C1 |
| Подвес для мультиспектральной камеры на беспилотный летательный аппарат | 2021 |
|
RU2752037C1 |
| CN 108382585 A, 10.08.2018 | |||
| KR 1020170087268 A, 28.07.2017 | |||
| CN 210235341 U, 03.04.2020. | |||

