Область техники
Изобретение относится к техническим средствам изучения и освоения морей и океанов, для проведения океанографических и геологических исследований, а именно, к автономному погружному оборудованию для мониторинга подводной инфраструктуры, картирования морских биоресурсов, а также их визуализации, для проведения инженерных изысканий под бурение и строительство на шельфе, и в конкретном варианте осуществления может быть использовано в составе подводно-аппаратного комплекса (ПАК) для картографирования объектов морского дна и их визуальной заверки.
Заявляемое техническое решение представляет собой оптический блок, предназначенный для использования в буксируемом устройстве для картографирования объектов морского дна и их визуальной заверки, погружаемом на глубину до 500 м, и в одном из вариантов исполнения включает оптические средства - видеокамеру и лазерные целеуказатели, закрепленные в блоке с обеспечением возможности фото-видео съемки морского дна.
Уровень техники
Из уровня техники известны отдельные устройства, аппараты и комплексы для проведения морской геофизической, гидрографической или фототелевизионной съемки, в т.ч. морского дна, а именно: подводный фотосъемочный комплекс [RU 47975 S], буксируемое подводное устройство [RU 2148003 С1], комплекс для гидрографических и геофизических работ на акваториях [RU 28257 U1], глубоководный фототелевизионный комплекс [RU 64587 U1], технологический комплекс для исследования шельфа [RU 16406 U1], морской геоакустический комплекс [RU 38233 U1], в которых присутствует оптический блок для фото-видео съемки морского дна.
Однако оптические блоки перечисленных устройств выполнены с возможностью регулировки лишь по одной оси, что ограничивает возможности для получения фотовидео изображений.
Из уровня техники известны оптические блоки, смонтированные в следующих буксируемых устройствах для картографирования объектов морского дна: DEEP OCEAN Phantom (http.//www.soest.hawaii.edu/pibhmc/cms/benthic-habitat-mapping/towed-camera-sleds/), в котором оптический блок смонтирован на П-образном профиле, который закреплен на несущей рамной конструкции посредством винта без обеспечения возможности регулирования угла поворота оптического блока. Для корректировки угла установки блока необходимо извлечь винт полностью, далее повернуть блок на требуемый угол, и затем винтом зафиксировать данное угловое положение оптического блока на раме, что не обеспечивает мобильности работы устройства при его эксплуатации; Phantom 500XTL-380 ROV (https://www.researchgate.net/figure/Deep-Ocean-Engineering-Phantom-500XTL-380-ROV-showing-a-camera-lasers-light-and_fig1_235194264), в котором оптический блок содержит треугольное основание с закрепленными на нем двумя целеуказателями, при этом блок закреплен на несущей рамной конструкции неподвижно, что создает неудобства при его эксплуатации и не обеспечивает требуемого качества съемки морского дна; аппарат (https://www.mdel.nzA), который также имеет в конструкции оптического блока лазерные целеуказатели, размещенные в отдельных хомутах-держателях, что увеличивает количество деталей, характеризуется сложностью изготовления устройства и снижением надежности при его эксплуатации.
Наиболее близким к заявляемому решению является оптический блок технологического комплекса для морских геологоразведочных работ («Абиссаль-3») (RU 106965 U1). Комплекс содержит забортную часть (ЗЧК), включающую фототелевизионный модуль (ФТМ), которые буксируются модулем заглубителя (МЗ) на разных удалениях от морского дна, при этом модуль заглубителя выполнен с возможностью стыковки с ФТМ в единый модуль на этапе вывода (приема) ФТМ за (на) борт судна-носителя. ФТМ содержит подключенные к блоку электроники телекамеру, цифровую фотокамеру, снабженный модемом связи блок телеметрии и блок светильников, который включает, по крайней мере, два светильника заливающего света и импульсный светильник, а также связанные входами-выходами с блоком электроники блок стабилизации альтитуды ФТМ над морским дном, блок лазерных масштабирующих элементов и подключенные к блоку электроники эхолот-альтиметр, датчик крена-дифферента и гидроакустический приемник для определения местоположения ФТМ относительно судна-носителя, причем вход-выход блока телеметрии кабель-тросом подключен к модулю МЗ. Блок лазерных масштабирующих элементов включает три лазера для формирования трех параллельных лазерных лучей с заданными расстояниями между ними с последующим определением размеров подводного объекта по его фотоизображению и точкам падения лазерных лучей на этот подводный объект. Модули размещены в сварных пространственных стержневых конструкциях (рамах), которые выполнены из труб круглого сечения и снабжены кронштейнами и ложементами, выполненными из листовой стали, на которых посредством ленточных хомутов или резьбовых соединений закреплено оборудование и герметичные боксы с аппаратурой.
Однако известный оптический блок комплекса не обеспечивает возможность выставления точной соосности всех компонентов и закреплением их в одном положении, требует контроля и юстировки.
Раскрытие изобретения
Задачей настоящего изобретения является устранение недостатков, присущих перечисленным выше аналогам, посредством разработки надежной конструкции оптического блока буксируемого устройства (или буксируемого тела) для картографирования объектов морского дна и их визуальной заверки при погружении на глубину до 500 м.
Техническим результатом изобретения является создание оптического блока, компактного и более надежного в эксплуатации, обеспечивающего легкую замену оптических элементов, их регулировку, точность и надежность фиксации параметров оптической съемки при упрощении конструкции блока.
Поставленная задача решается тем, что узел крепления оптического блока в буксируемом устройстве для картографирования объектов морского дна и их визуальной заверки, включает переднее основание, выполненное с возможностью закрепления в нем передней части корпуса видеокамеры и четырех лазерных целеуказателей с обеспечением параллельного размещения оптических осей лазерных целеуказателей и видеокамеры, и заднее основание, выполненное с возможностью закрепления задней части видеокамеры, при этом основания закреплены между боковыми пластинами с возможностью углового перемещения оснований в плоскости, параллельной боковым пластинам, при этом переднее основание выполнено в виде хомута, состоящего из двух разъемных элементов -полухомутов, при соединении образующих центральное посадочное отверстие для размещения передней части корпуса видеокамеры, при этом каждый из элементов выполнен со стяжными «ушками» для соединения полухомутов между собой с обеспечением фиксации видеокамеры в центральном посадочном отверстии и крепления к боковым пластинам, и снабжен двумя выступающими площадками с отверстиями и прорезями для фиксации двух лазерных целеуказателей.
Для углового перемещения оснований с закрепленными в них видеокамерой и лазерными целеуказателями в плоскости, параллельной боковым пластинам, боковые пластины выполнены с двумя сквозными дугообразными прорезями, обеспечивающими поворот хомутов с закрепленными в них видеокамерой на угол не более 90°, а также отверстиями для крепления к раме буксируемого устройства. Крепление оснований к боковым пластинам может быть реализовано посредством уголков, каждый из которых снабжен двумя крепежными отверстиями, одно из которых выполнено на одной стороне уголка и предназначено для соединения с боковой пластиной в месте размещения дугообразной прорези, второе крепежное отверстие выполнено на второй стороне уголка и имеет протяженную форму для обеспечения соединения с «ушками» хомута.
Полухомуты со стороны посадочного отверстия для видеокамеры снабжены кольцевым пазом с размещенным в нем уплотнительным материалом для обеспечения плотной фиксации корпуса видеокамеры в основании. Выступающие площадки полухомутов выполнены с обеспечением размещения в хомуте четырех лазерных целеуказателей на равноудаленном расстоянии друг от друга с параллельным расположением их оптических осей. Центры отверстий для целеуказателей расположены на расстоянии 160-170 мм от фокусной точки видеокамеры или на расстоянии 20-30 мм от корпуса камеры. Полухомуты выполнены из полиэтилена высокого давления толщиной 10-20 мм для обеспечения гальванической развязки между рамной конструкцией и корпусом видеокамеры.
Поставленная задача решается также тем, что оптический блок буксируемого устройства для картографирования объектов морского дна и их визуальной заверки включает узел крепления в буксируемом устройстве, описанной выше конструкции, в котором в переднем и заднем основаниях закреплена видеокамера, а в отверстиях выступающих площадок переднего основания закреплены четыре лазерных целеуказателя с обеспечением параллельного размещения оптических осей лазерных целеуказателей и видеокамеры.
В качестве видеокамеры может быть использована модель US Lasers M650-5I, мощностью 5 мВ, с длиной волны 650 нМ. Видеокамера и лазерные целеуказатели герметично размещены в отдельных цилиндрических корпусах, выполненных из алюминиевого сплава с толщиной стенок не менее 5 мм.
Рамная конструкция может быть выполнена из нержавеющей стали, при этом выполнение крепежного элемента для видеокамеры и лазерных целеуказателей из полиэтилена высокого давления обеспечивает гальваническую развязку между рамной конструкцией и корпусом видеокамеры. В конкретном варианте выполнения рамная конструкция выполнена из металлических уголков, снабженных перфорированными регулировочными отверстиями для установки крепежных элементов.
Таким образом, заявляемый крепежный узел вместе с размещенными в нем видеокамерой и целеуказателями представляет собой единый оптический модуль, который может быть закреплен на раме с возможностью его углового поворота (или поворота относительно поперечной оси, расположенной на пересечении с оптической осью видеокамеры).
По сравнению с наиболее близким аналогом заявляемый оптический блок буксируемого устройства характеризуется компактностью, имеет более простую, но надежную конструкцию, что обеспечивает его применение для работ на шельфовых районах с маломерных судов. Закрепление лазерных целеуказателей и видеокамеры с параллельным расположением их оптических осей позволяет более точно измерять размеры объектов, а также определять уровень наклона обследуемой поверхности дна относительно аппарата.
Кроме того, оптический блок характеризуется простотой его сборки, эксплуатации и ремонта, возможностью замены вышедших из строя целеуказателей и/или видеокамеры.
Заявляемое устройство можно использовать для детальных подводно-осмотровых работ, получения более детальных данных и/или визуальной заверки найденных неоднородностей при размещении буксируемого тела с оборудованием для фото и видео съемки на необходимой глубине.
Прочность и надежность оптического блока помимо выполнения элементов крепления оригинальной конструкции, обеспечивается также выполнением видеокамеры и целеуказателей в защитных усиленных корпусах.
Краткое описание чертежей
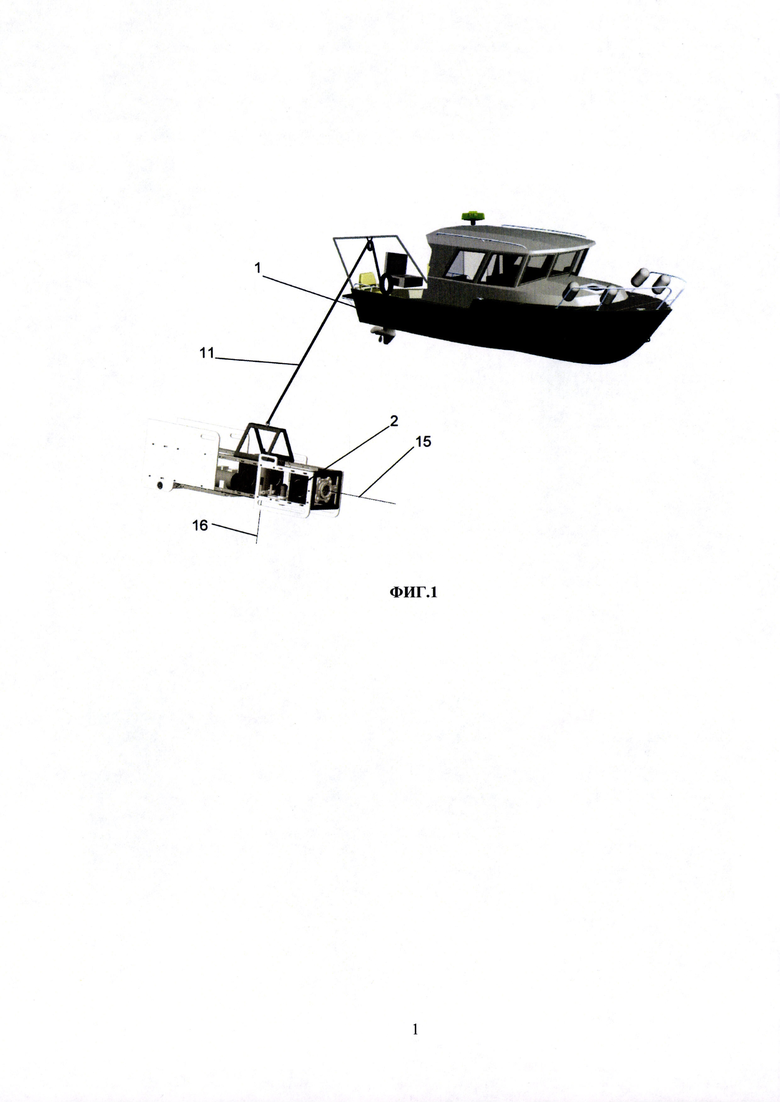
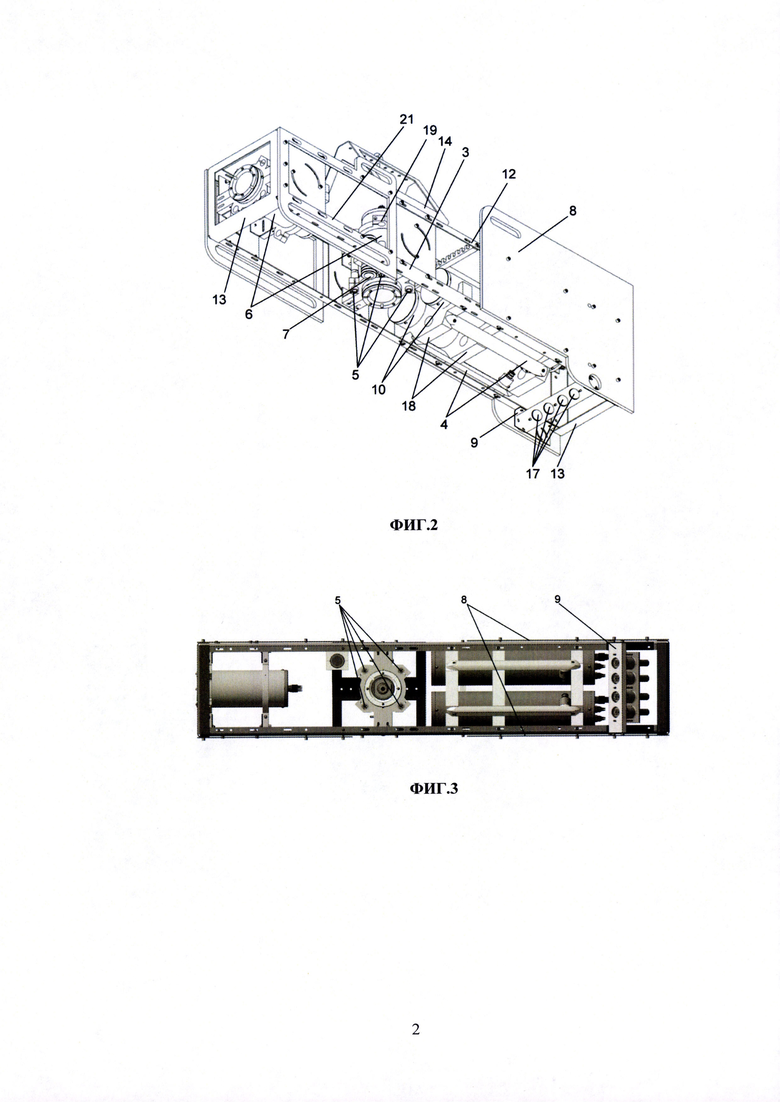
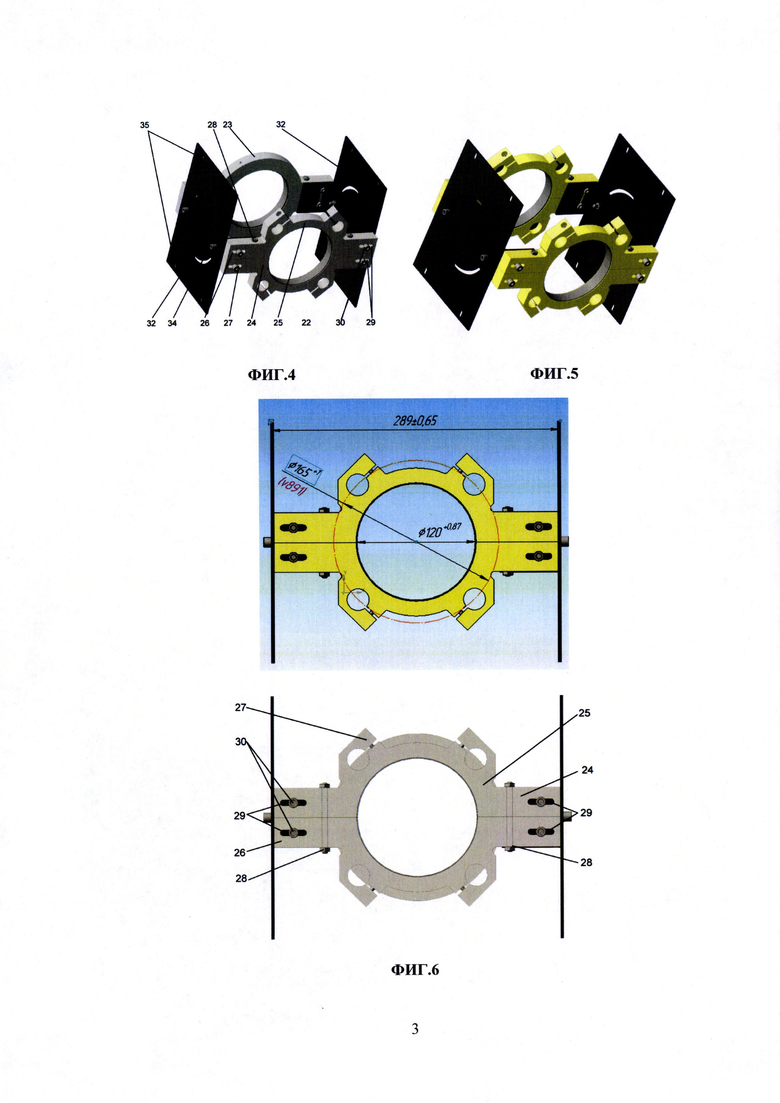
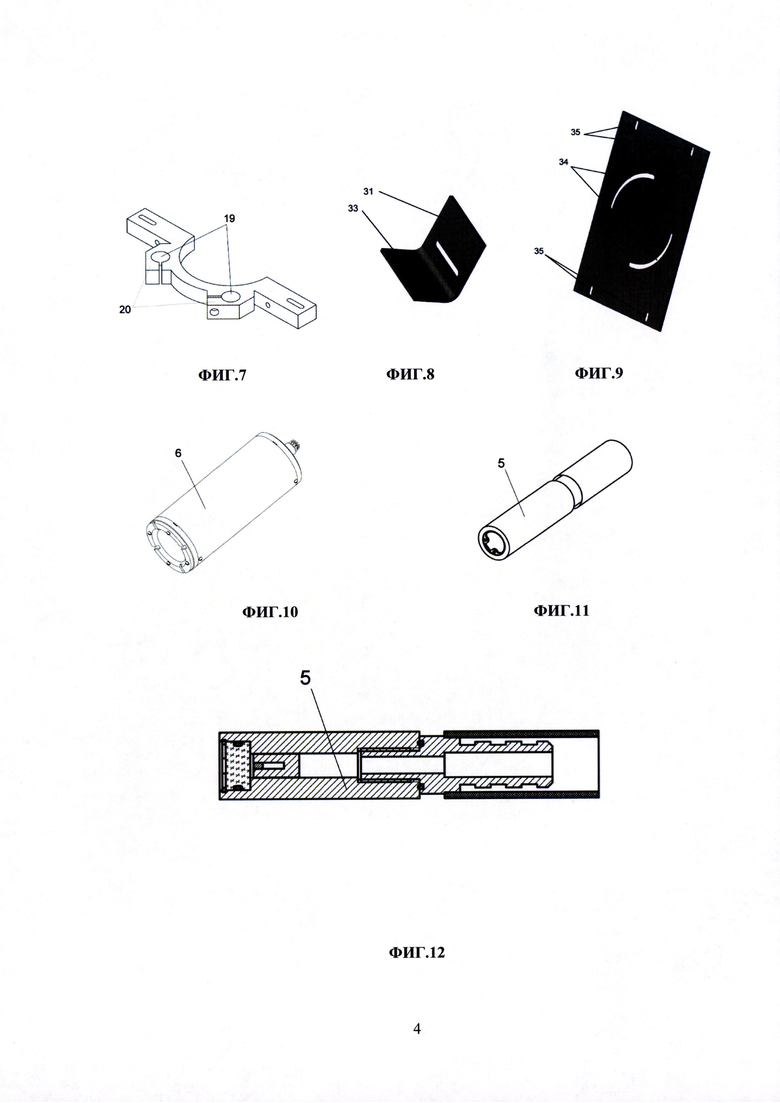
Изобретение поясняется чертежами, где на фиг. 1 представлена схема проведения исследований морского дна с помощью заявляемого оптического блока буксируемого устройства (буксируемого тела); на фиг. 2 - буксируемое устройство в изометрии с двумя оптическими блоками; на фиг. 3 - буксируемое устройство с двумя оптическими блоками, вид снизу; на фиг. 4 и 5 - узел крепления (в сборе) оптического блока к несущей рамной конструкции буксируемого устройства, общий вид; на фиг. 6. - узел крепления (в сборе) оптического блока к несущей рамной конструкции буксируемого устройства, вид спереди; на фиг. 7 - крепежный элемент для видеокамеры и лазерных целеуказателей (полухомут), общий вид; на фиг. 8 представлен уголок для закрепления хомута из элементов для видеокамеры и лазерных целеуказателей на боковых пластинах; на фиг.9 представлено изображение боковой пластины; на фиг. 10 - изображение видеокамеры, на фиг. 11 и 12 представлено изображение лазерного целеуказателя, общий вид и продольный разрез, соответственно; на фиг. 13, 14 - фрагменты видеоизображений морского дна.
Позициями на фигурах обозначены:
1 - судно грузоподъемностью не менее 350 кг,
2 - буксируемое тело,
3 - несущая рамная конструкция,
4 - антенна гидролокатора бокового обзора (ГБО),
5 - лазерные целеуказатели,
6 - видеокамеры,
7 - альтиметр для определения возвышения над поверхностью,
8 - стабилизаторы курсовой устойчивости (обеспечения прямолинейного хода) («хвостовые» стабилизаторы),
9 - модуль освещения,
10 - блок электроники,
11 - кабель-трос на ручной или моторизированной катушке,
12 - продольные элементы рамной конструкции,
13 - поперечные элементы рамной конструкции,
14 - подвес крепления кабель-троса для буксировки,
15 - оптическая ось первой видеокамеры первого оптического блока,
16 - оптическая ось второй видеокамеры второго оптического блока,
17 - светодиодные лампы (светодиоды),
18 - ложемент для размещения блока электроники,
19 - крепежный элемент видеокамеры,
20 - выступающие площадки крепежного элемента видеокамеры с отверстиями для размещения лазерных целеуказателей (ЛЦУ),
21 - передние обтекатели в виде рамных элементов,
22 - переднее основание
23 - заднее основание
24, 25 - полухомут
26, 27 - стяжные «ушки»
28 - шпилька (или винт)
29 - сквозные пазы
30 - крепежные элементы
31 - уголок
32 - боковые пластины
33 - отверстие на уголке 31
34 - дугообразные (полукруглые) сквозные прорези (пазы)
35 - отверстия на пластинах 32
Осуществление изобретения
Устройство для картографирования объектов морского дна и их визуальной заверки в источниках научно-технической информации может иметь различные наименования, например, буксируемое тело, или забортная буксируемая аппаратура/комплекс, или подводный необитаемый буксируемый аппарат.
Заявляемый оптический блок буксируемого устройства может быть использован в составе подводного аппаратного комплекса (ПАК).
Подводный аппаратный комплекс (ПАК) - техническое устройство, перемещающееся в толще воды и (или) по дну и используемое для научных исследований, поисковых и аварийно-спасательных операций, а также производственных работ под водой. В частности, подводные аппараты применяются для проведения геологических и геофизических измерений вблизи океанского дна с целью изучения геологического строения дна океана, состава слагающих его пород, поиска и разведки месторождений полезных ископаемых в Мировом океане, а также при эксплуатации месторождений, для осмотра и ремонта буровых платформ и т.п.Вычислительный комплекс получает всю необходимую информацию о состоянии объекта, в том числе о регулируемых и управляемых величинах. Характерной особенностью рассматриваемого вида системы является то, что задачи анализа поступающей информации, принятие решений, а также осуществление управляющих воздействий возлагаются на оператора.
Конструктивно ПАК содержит установленный на судне 1 судовой блок электроники, связанный с подводным модулем 2 (буксируемое тело/забортная буксируемая аппаратура - техническое устройство, перемещающееся в толще воды), например, посредством кабеля-троса 11, при этом бортовой обрабатывающий модуль выполнен с возможностью передачи информации, сбора и обработки данных, управления буксируемым телом. Буксируемое устройство в составе ПАК для картографирования объектов морского дна и их визуальной заверки может работать с передачей данных на борт судна как по кабель-тросу 11, так и в автономном режиме. В автономном режиме работы комплекс можно использовать на малых судах, не имеющих лебедки для кабель-троса, а также для работы на средних глубинах. Пример схемы размещения и эксплуатации буксируемого тела показан на фиг. 1. Буксируемое тело 2 содержит рамную конструкцию 3 и размещенные на ней блок электроники 10, оптический и акустический блоки, крепежные узлы/элементы, систему стабилизаторов курсовой устойчивости 8 для обеспечения прямолинейного хода буксируемого тела, систему буксировки.
Основу буксируемого тела составляет сварная или сборная рамная конструкция 3 торпедовидной формы (например, приближенной к параллелепипеду), которая может быть выполнена из нержавеющей стали - прямоугольной трубы и гнутого уголка, с установленными в ее передней части обтекателями 21 и в задней части стабилизаторами курсовой устойчивости 8 («хвостовым» стабилизатором) (см. фиг. 2, 3). Такая конструкция обеспечивает хорошую стабилизацию буксируемого тела как на малых скоростях его перемещения для ведения фото и видео съемки, так и на больших скоростях для ведения гидролокационной съемки. При этом уменьшение рысканий и дифферента определяется с помощью «хвостового» стабилизатора 8. Размещение на раме подвеса для крепления кабель-троса для буксировки обеспечивает центровку устройства для стабильного перемещения. На трубах/уголках боковин рамы, продольных и поперечных элементах выполнены прорези, например, фрезерованием, обеспечивающие монтаж и надежное закрепление навесного оборудования с помощью крепежных элементов. Наличие прорезей позволяет закреплять оборудование в произвольных точках рамы, что обеспечивает возможность оптимального его размещения и подбора правильной балансировки буксируемого тела. Утяжеление буксируемого тела может производиться грузами, закрепляемыми за монтажные прорези рамы, или установкой дополнительных балластных поперечин, например, залитых свинцом. Закрепление буксируемого тела на тросе или на кабель-троссе производят при помощи такелажных скоб, продетых в отверстия подвеса для буксировки.
Рамная конструкция может быть изготовлена из высоколегированной низкоуглеродистой стали AISI316L, устойчивой к морской воде. Использование этой марки стали, условно совместимой с алюминиевыми сплавами, позволяет монтировать на рамную конструкцию оборудование в алюминиевых корпусах. Для обеспечения дополнительной коррозионной защиты могут быть установлены на раму цинковые протекторные аноды, площадь которых подбирают в зависимости от конкретного материала и площади корпусов оборудования.
Стабилизаторы курсовой устойчивости закреплены жестко в задней части («хвостовой» части) рамной конструкции и в одном из вариантов реализации изобретения представляют собой плоские элементы (пластины), изготовленные из полипропилена. Отрицательный угол атаки буксируемого тела может регулироваться посредством изменения точек крепления буксировочного троса и перераспределения балластного груза.
Решение рамной конструкции с системой стабилизаторов курсовой устойчивости и обтекателями обеспечивает наименьшую парусность устройства за счет уменьшения лобового сопротивления, облегчает его спуск-подъем на борт обеспечивающего судна, что в целом приводит к мобильности работы с данным устройством. Размещение элементов для буксировки обеспечивает центровку устройства для его стабильного перемещения.
Основная комплектация буксируемого тела предусматривает установку на нем оптического и акустического блоков, блока электроники (подводного блока). Оптический и акустический блоки соединены с блоком электроники посредством герметичных кабельных разъемов, подводный блок электроники посредством сигнальных жил кабель-троса соединен с бортовым блоком электроники.
Буксируемое устройство может также содержать модуль освещения, который включает закрепленные на основании светодиодные лампы 17, размещенные в нижней задней части рамной конструкции с возможностью изменения угла поворота относительно поперечного элемента рамной конструкции, на котором закреплен упомянутый блок.
Ниже представлено более подробное описание заявляемого оптического блока.
Оптический блок закреплен на рамной конструкции посредством крепежного узла с размещенными в нем видеокамерой 6 и четырьмя лазерными целеуказателями 5, установленными вокруг видеокамеры с параллельным расположением их оптических осей (см. фиг. 4-12).
Для крепления видеокамер использованы хомуты, которые обеспечивают «развязку» стальных и алюминиевых элементов конструкции, при этом фиксируют видеокамеры, так, что само изделие не касается корпуса конструкции, не вызывая взаимное окисление. Таким образом, видеокамеры крепятся хомутами, которые в свою очередь крепятся к несущей рамной конструкции. Крепеж лазерных целеуказателей представляет собой «эксцентриковый позиционер», который выполнен заодно с хомутом. Лазерные целеуказатели, установленные в данный крепежный элемент по схеме, обозначенной на фиг. 6, обеспечивают возможность их калибровки в 4-х точках лазерной сетки.
Крепежные элементы для функциональных элементов устройства спроектированы, так, чтобы минимизировать соприкосновение окисляющихся материалов. В качестве материала крепежных элементов камер, светодиодных ламп (фонарей), лазерных целеуказателей использован полипропилен Poly stone Р (Homopolymer). Особенностью данного материала является его высокая прочность, стойкость к воздействию высоких температур, свариваемость, стойкость к воздействию химически агрессивных сред и коррозии.
Крепежный узел содержит переднее основание 22 и заднее основание 23, которые выполнены в виде хомута, состоящего из двух разъемных элементов - полухомутов 24 и 25, со стяжными «ушками» 26 и 27, в которых со стороны торцевой поверхности выполнены сквозные отверстия для шпилек 28 (винтов), стягивающих полухомуты между собой. Шпильки 28 при стягивании полухомутов обеспечивают фиксацию видеокамеры в центральном посадочном отверстии. В полухомутах со стороны их передней поверхности выполнены протяженные сквозные пазы 29 для размещения крепежных элементов 30, которые связывают полухомуты с уголком 31, также имеющим сквозной паз. Пазы в полухомутах 24 и 25 по отношению к пазам уголков 31 расположены при сборке оптического блока перпендикулярно. Это позволяет осуществлять регулировку положения уголка 31 относительно полухомутов и боковых пластин 32 для совмещения отверстия 33 в уголке 31 с полукруглыми сквозными пазами 34 на боковых пластинах 32 (для дальнейшего размещения крепежных элементов, которые на фигурах не показаны), и фиксации положения полухомутов 24 и 25 относительно боковых пластин 32 с помощью, например, винтов (на фигурах не показаны). Сквозные пазы 34 на пластинах 32 выполнены по окружности, расположены на пластине оппозитно и занимают примерно четверть ее дуги, что позволяет регулировать угол наклона оптического блока в диапазоне от 0 до 90 градусов. На рис.5 показан вариант оптического узла, в котором переднее и заднее основания 22 и 23 имеют одинаковое конструктивное исполнение. Отверстия 35 на пластинах 32 используют для крепления оптического блока в ПАК - к несущей рамной конструкциии ПАК (его продольным 12 или поперечным 13 элементам) или к его передним обтекателям 21.
Крепление видеокамеры в оптическом блоке осуществляется в центральном отверстии переднего основания 22 при стягивании полухомутов 24 и 25. Полухомуты 24 и 25 переднего и заднего оснований со стороны посадочного отверстия для видеокамеры снабжены кольцевым пазом (на чертеже не показаны) с размещенным в нем уплотнительным материалом для обеспечения плотной фиксации корпуса видеокамеры в основании. Заднее основание 23 дополнительно осуществляет закрепление видеокамеры и может быть выполнено в различных вариантах: либо, как повторение переднего основания 22, либо в виде единой детали. На рис.4 показан вариант выполнения заднего основания 23 в виде хомута без площадок для установки целеуказателей.
Крепление лазерных целеуказателей 5 осуществляется на выступающих площадках 20 в отверстиях 19. Площадки 20 имеют сквозной разрез (на фигурах не обозначен) от своей границы до отверстий 19. Диаметр отверстий 19 может уменьшаться при затягивании винтов, проходящих сквозь разрез. Винты при затягивании уменьшают величину зазора между смежными (контактными) площадками в зоне разреза, и, таким образом, уменьшают диаметр отверстий 19, надежно закрепляя в них лазерные целеуказатели.
Сборка оптического узла происходит следующим образом: с помощью шпилек 28 стягивают (не до конца, учитывая необходимость в дальнейшем размещения и закрепления видеокамеры в центральном отверстии) полухомуты 26 и 27 переднего 22 и заднего 23 оснований между собой; с помощью уголков 31 и крепежных элементов соединяют в единый узел переднее 22 и заднее 23 основания с двумя боковыми пластинами 32; устанавливают видеокамеру в переднее 22 и заднее 23 основания и осуществляют ее фиксацию с помощью шпилек 28, при этом происходит и стяжка полухомутов 24 и 25; осуществляют стяжку крепежных элементов 30 дополнительно фиксируя положение полухомутов 24 и 25; производят регулировку положения видеокамеры (ее оптической оси) перемещая переднее и заднее основания 22 и 23 по сквозным пазам 34 на пластинах 32; фиксируют с помощью крепежных элементов положение оснований 22 и 23 относительно боковых пластин 32; в отверстия 19 вставляют лазерные целеуказатели и фиксируют их путем затягивания винтов; оптический узел в сборе через отверстия 35 на пластинах 32 крепят к рамной конструкции ПАК.
В буксируемом теле, как правило, используют два оптических блока со взаимно перпендикулярным размещением оптических осей видеокамер - один из блоков закреплен в передней части рамной конструкции таким образом, чтобы оптическая ось видеокамеры 6 данного блока была ориентирована по курсу, второй блок - в центральной нижней части рамной конструкции таким образом, чтобы оптическая ось второй видеокамеры 6 второго блока была ориентирована вниз. При этом оба оптических блока закреплены на рамной конструкции с возможностью поворота относительно поперечных элементов 13 рамной конструкции.
При комплектации оптического блока может быть использована погружаемая видеокамера, например, IP-видеокамера Full HD (1920×1080@50 fps; 3 МР:2048×1536@15 fps; 5 МР:2592×1920@10 fps), заключенная в прочный герметичный корпус из коррозионно-стойкого алюминиевого сплава (например, Амг6) (см. фиг. 10). Камера позволяет передавать видеоизображение с разрешением, достаточным для уверенного распознавания подводных ландшафтов в целях визуального подтверждения картирования ландшафтов дна. Корпус состоит из трубчатого корпуса, прижимной шайбы иллюминатора и задней крышки. Плата видеокамеры жестко смонтирована внутри корпуса. Переднюю стенку корпуса занимает иллюминатор из силикатного стекла, уплотненный торцевым кольцом. Соединения частей корпуса уплотнены торцевыми уплотнениями с использованием резиновых колец. Детали корпуса соединены между собой на болтах с внутренним шестигранником из нержавеющей стали, гальванически совместимой с материалом корпуса. На задней крышке смонтирован герметичный электрический разъем для подключения к сети передачи данных устройства, например, разъем типа SubConn.
Лазерные целеуказатели (указатели) размещены таким образом, чтобы проецируемые ими изображения точек на исследуемое дно попадало в поле зрения камеры для обеспечения определения положения буксируемого тела относительно грунта и определения размеров исследуемых объектов.
Подводный лазерный целеуказатель представляет собой герметичный модуль (см. фиг. 11, 12). Питание указателя может быть автономным от встроенных аккумуляторов или осуществлено по проводу от блока электроники. В одном из вариантов осуществления изобретения были использованы лазерные целеуказатели со следующими характеристиками: светодиоды TXL-04; мощность 5 мВт; длина волны 650 нМ; цвет точки красный; напряжение питания 5 В, рабочая глубина 500 м, габариты 40×40×65 мм (без кронштейнов крепления и гермоввода), 40×40×140 мм (вместе с гермовводом, без кронштейнов крепления), 70×80×140 мм (вместе с гермовводом и кронштейнами крепления).
Лазерный целеуказатель был собран в корпусе из коррозионно-стойкого алюминиевого сплава АМг6. Указатель размещен в соответствующем отверстии крепежного элемента - хомута, состоящего из двух частей, стягиваемых резьбовым соединением. В задней части корпуса лазерного целеуказателя расположен гермоввод выполненный из коррозионно-стойкого алюминиевого сплава АМгб для подключения к блоку электроники. Герметизация лазерного целеуказателя осуществлена стеклянным иллюминатором на кольцевом уплотнении, прижатом стопорным кольцом с максимально уменьшенной полостью для образования воздушного кармана. Корпус лазера выполнен разборным, позволяющим, при необходимости, произвести замену лазера.
Для реализации функций оптического блока в процессе эксплуатации, ПАК снабжен блоком освещения (светодиодный осветительный блок), который представляет собой размещенные на основании светодиодные лампы (см. фиг. 2), расположенные каждая в своем герметичном корпусе с обеспечением совокупного светового потока не менее 3000 люмен, предпочтительно около 4000 люмен, который обеспечивает работу видеокамер высокого разрешения. Управление блоком освежения может быть реализовано по протоколу I2C, который дает возможность менять конфигурацию осветительной системы для решения конкретной задачи освещения подводных объектов. Блок освещения установлен под наклоном к нижней поверхности рамы, как показано на фиг. 2. Такое размещение блока снижает уровень передней засветки в видеокамеру и улучшает качество конечного фото и видео изображения.
В одном из вариантов осуществления изобретения были использованы светодиодные лампы со следующими характеристиками: Optogan X10, сборки по четыре модуля (арт. OCC-0202F10-09A), Световой поток: 4000 лм (в зависимости от конкретного исполнения светодиодной сборки); Цветовая температура: 3000-6500K; Напряжение питания: 24в-48 в, Габариты: 45×80 мм (без кронштейнов крепления).
Светодиодные лампы (осветители) были собраны в корпусах из коррозионно-стойкого алюминиевого сплава АМг6. В передней части корпуса размещены светодиоды, в задней части расположены платы драйвера светодиода, плата управления и разъем. Корпус имеет на внешней поверхности проточки для обеспечения оптимального теплоотвода и для предотвращения выхода из строя при случайном включении на поверхности. Отличительной особенностью лампы является то, что светодиод расположен за пределами его прочного корпуса. Это позволяет существенно сократить габариты изделия и обеспечить лучшие условия для охлаждения мощных светодиодов. Герметизация светодиодов осуществлена за счет заливки прозрачным полиуретановым компаундом Poly-OPTIC, имеющим хорошую адгезию к материалу корпуса. Задняя крышка обеспечивает герметизацию корпуса, при этом на ней размещен герметичный разъем питания и управления, в качестве которого может быть использован разъем типа SubConn для подводной аппаратуры, показавший свою высокую надежность. Теплоотвод от выделяющих тепло компонентов плат происходит на корпус через слой теплопроводного клея. Драйвер светодиода контролирует его ток, позволяет управлять мощностью осветителя, обеспечивает ограничение яркости при перегреве и аварийное выключение при коротком замыкании. Плата управления реализует логику работы осветителя: контроль за напряжением питания, включение и выключение, изменение мощности, контроль температуры светодиода, снижение мощности и аварийное отключение при перегреве. Команды на управление осветителем плата управления принимает по двум линиям протокола I2С, выведенным на разъем осветителя. По ним же передаются сообщения о состоянии осветителя и о возникновении аварий. При отсутствии внешнего управления, плата переходит в автономный режим работы, обеспечивая максимально возможную яркость осветителя для имеющихся условий питания и охлаждения.
Изменение яркости осветителя может производится за счет широтно-импульсной модуляции тока. Частота модуляции выбрана достаточно высокой, чтобы обеспечить отсутствие влияния мерцания светодиода при видеосъемке с высокой частотой кадров. Кроме того, снижение мерцания обеспечивает выбранная схема драйвера светодиода. Логика работы осветителя может быть реализована программно на основе микропроцессорного управления, что позволяет гибко изменять ее для учета особенностей конкретных задач. Конструкция платы управления позволяет оперативно перепрограммировать управляющий микроконтроллер, не извлекая плату из корпуса осветителя. Указанная схема размещения блока освещения снижает уровень передней засветки в телекамеру и улучшает качество конечного фото и видео изображения.
Помимо перечисленных выше оптического блока и блока освещения ПАК также может содержать: акустический блок, включающий гидролокатор бокового обзора с двумя антеннами 4, размещенными на рамной конструкции в продольном направлении и закрепленными с нижней стороны ложементов, а также закрепленный на рамной конструкции альтиметр, при этом антенны и альтиметр на рамной конструкции буксируемого тела установлены с возможностью защиты для отражения различных случайных столкновений устройства с объектами, находящимися на дне, а также при транспортировке и такелажных работах; гидролокатор бокового обзора (ГБО); подводный блок электроники, осуществляющий сбор и первичную обработку поступающих сигналов, напрямую коммутированный с набортным вычислительным комплексом. В ПАК может быть использовано два блока электроники, где каждый блок представляет собой герметично размещенные в цилиндрическом корпусе платы управления функциональными элементами блоков и передачи данных, плату гидролокатора бокового обзора, блоки питания и коммутации, при этом блок электроники размещен на ложементе, который закреплен в нижней задней части рамной конструкции и снабжен разъемом для подключения к судовому блоку управления.
Заявляемое устройство работает следующим образом.
Заявляемое устройство может быть установлено на любое погружное оборудование для решения задач мониторинга подводной инфраструктуры, картирования морских биоресурсов, а также их визуализации, для проведения инженерных изысканий под бурение и строительство на шельфе. Как правило, управление таким оборудованием осуществляется с судна (см. фиг. 1). При работе с видеокамерами после погружения и приближения ко дну на глубину от 4 до 1 м (в зависимости от прозрачности), определяемую по альтиметру, оператор включает видеокамеры высокого разрешения, лазерные целеуказатели и осветители, после выхода на объект съемок оператор включает запись видеокамер. Расстояние от устройства до дна контролируется по альтиметру и регулируется путем количества вытравленного кабель-тросса. При работе с ГБО также по альтиметру определяется необходимая глубина. После чего оператор включает гидролокатор бокового обзора, настраивает необходимую дальность съемки и осуществляет запись. Как и в случае работы с видеокамерой оператор расстояние от устройства до дна контролирует по альтиметру и регулирует путем количества вытравленного кабель-тросса. Все данные поступающие с устройства по кабель-тросу поступают на пульт оператора в режиме реального времени с установленным программным обеспечением, необходимым для работы.
При работе с видеокамерами после погружения и приближения ко дну оператор оценивает качество получаемого видеоизображения, с учетом необходимости обеспечения безопасного расстояния до дна. При необходимости производится коррекция положения оптического блока, т.е. относительного угла наклона оптической оси видеокамеры к дну. Положение оптического блока относительно рамной конструкции устройства, и соответственно, относительно исследуемой поверхности дна, регулируется путем одновременного поворота переднего и заднего оснований 22 и 23 вместе с закрепленными в них видеокамерой и лазерными целеуказателями в пазах пластин 32 и дальнейшей фиксации этого положения.
Примеры осуществления изобретения.
В соответствии с заявляемым решением был изготовлен оптический блок, который был размещен на буксируемом теле, как показано на фиг. 2. Внутри рамной конструкции были расположены элементы электроники в прочных герметичных цилиндрических корпусах. В центральной нижней части располагалась цветная видеокамера высокого разрешения, в задней части устройства расположен блок управления. Модули освещения расположены в задней части устройства под регулируемым углом. Лазерные целеуказатели (ЛЦУ) расположены вокруг телекамер. Устройство имело возможность погружения до 500 м.
Узел крепления оптического блока был выполнен из полистирола толщиной 12 мм +\-1 мм, весом 207 г +\- 5%. Устройство было укомплектовано двумя цифровыми цветными видеокамерами с возможностью записи видео и фотоизображний как на встроенную память, так и передачи в режиме реального времени - Beward BD5260Z18, имеющими следующие характеристики: сенсор -2 Мп, КМОП 1/2.8" SONY Exmor R, разрешение: 1920x1080 (Full HD), 1280x1024 (SXGA), 1280x720 (HD) До 50 (60) к/с; лазерными целеуказателями TXL-04 со следующими характеристиками: длина волны: 650 nm, мощность: 5 mW, Тип: точка; светодиодными лампами Optogan Х10 со следующими характеристиками: световой поток 3840 лм, Рабочий ток: 700-2100 mA; гидролокатором бокового обзора StarFish 453 OEM со следующими характеристиками: рабочая частота 450 кГц, ширина горизонтального луча 0.5°, вертикальная ширина луча 60° рабочая глубина 300 м; альтиметром РА500 - Digital Precision Altimeters со следующими характеристиками: рабочая частота, 500кГц, ширина луча: 6° коническая, диапазон измерений: от 0,3 до 50 м, рабочая глубина: 700 м. Используемые видеокамеры были снабжены моторизированным механизмом для обеспечения плавного изменения фокусного расстояния.
С помощью изготовленного буксируемого тела были проведены полевые мелководные испытания на Беломорской биологической станции (ББС). Проведена серия из 5 спусков. Аппарат опускали на дно недалеко у берега на глубину 10 метров. Время придонной экспозиции от 10 до 15 минут. Проведена проверка спуска и подъема на скоростях от 1 до 30 м/мин. Были получены фото и видеоданные в цифровом виде в режиме онлайн, примеры полученных изображений представлены на фиг. 13 и 14.
Кроме того, были проведены натурные морские полевые испытания на средних и больших глубинах. Была проведена серия из 5 глубоководных спусков. Аппарат опускался на глубину 100, 300 и 500 метров на отдельном тросе. Время придонной экспозиции составило от 10 до 15 минут. Проведена проверка спуска и подъема на скоростях от 1 до 30 м/мин. Были получены фото и видеоданные в цифровом виде в режиме онлайн.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКСИРУЕМОЕ УСТРОЙСТВО ДЛЯ КАРТОГРАФИРОВАНИЯ ОБЪЕКТОВ МОРСКОГО ДНА И ИХ ВИЗУАЛЬНОЙ ЗАВЕРКИ | 2018 |
|
RU2679922C1 |
| Арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2023 |
|
RU2836682C2 |
| Стабилизатор для ручной подводной фото-видеосъемки | 2017 |
|
RU2649067C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| ОПТИЧЕСКИЙ ПЕРЕДАЮЩИЙ МОДУЛЬ | 1992 |
|
RU2019013C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ | 2009 |
|
RU2396504C1 |
| ПОДВОДНЫЙ АППАРАТ ДЛЯ УНИЧТОЖЕНИЯ ПОТЕНЦИАЛЬНО ОПАСНОГО СТАЦИОНАРНОГО ОБЪЕКТА | 2017 |
|
RU2670192C9 |
| Мобильный роботизированный комплекс фонтанирующих скважин МРК-ФС | 2019 |
|
RU2718550C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ПАДЕНИЯ ЧЕЛОВЕКА ПРИ ПОДЪЕМЕ И СПУСКЕ (ВАРИАНТЫ) | 2019 |
|
RU2735137C1 |
Изобретение относится к техническим средствам для проведения океанографических и геологических исследований, а именно к автономному погружному оборудованию для мониторинга подводной инфраструктуры, картирования морских биоресурсов, а также их визуализации, для проведения инженерных изысканий под бурение и строительство на шельфе, и в конкретном варианте осуществления может быть использовано в составе подводно-аппаратного комплекса (ПАК) для картографирования объектов морского дна и их визуальной заверки. Заявленный оптический блок буксируемого устройства для картографирования объектов морского дна и их визуальной заверки включает узел крепления, содержащий переднее основание, выполненное с возможностью закрепления в нем передней части видеокамеры и четырех лазерных целеуказателей с обеспечением параллельного размещения оптических осей лазерных целеуказателей и видеокамеры, и заднее основание, выполненное с возможностью закрепления задней части видеокамеры. При этом основания закреплены между боковыми пластинами с возможностью углового перемещения оснований с закрепленными в них видеокамерой и лазерными целеуказателями в плоскости, параллельной боковым пластинам. Переднее основание выполнено в виде хомута, состоящего из двух разъемных элементов - полухомутов, при соединении образующих центральное посадочное отверстие для размещения передней части корпуса видеокамеры, при этом каждый из элементов выполнен со стяжными «ушками» для соединения полухомутов между собой с обеспечением фиксации видеокамеры в центральном посадочном отверстии и крепления к боковым пластинам и снабжен двумя выступающими площадками с отверстиями и прорезями для фиксации двух лазерных целеуказателей на равноудаленном расстоянии друг от друга. Технический результат – создание оптического блока, компактного и более надежного в эксплуатации, обеспечивающего легкую замену оптических элементов, их регулировку, точность и надежность фиксации параметров оптической съемки при упрощении конструкции блока. 2 н. и 7 з.п. ф-лы, 14 ил.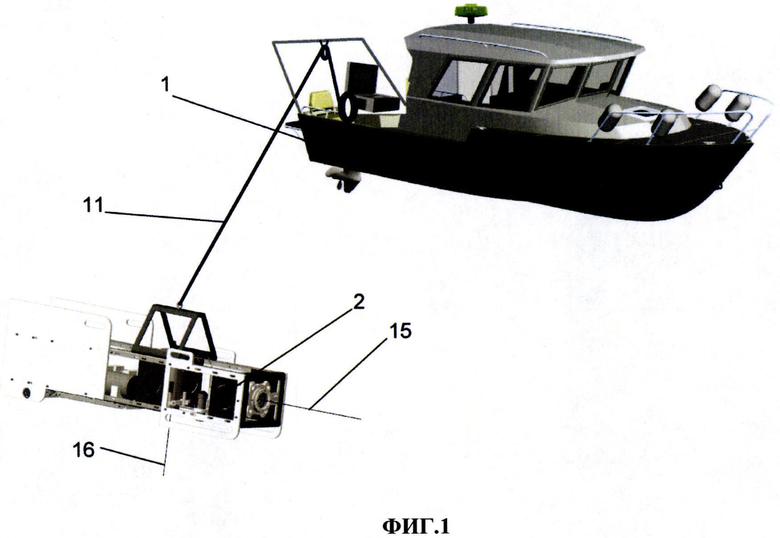
1. Узел крепления оптического блока в буксируемом устройстве для картографирования объектов морского дна и их визуальной заверки, включающий переднее основание, выполненное с возможностью закрепления в нем передней части корпуса видеокамеры и четырех лазерных целеуказателей с обеспечением параллельного размещения оптических осей лазерных целеуказателей и видеокамеры, и заднее основание, выполненное с возможностью закрепления задней части видеокамеры, при этом основания закреплены между боковыми пластинами с возможностью углового перемещения оснований в плоскости, параллельной боковым пластинам, при этом переднее основание выполнено в виде хомута, состоящего из двух разъемных элементов - полухомутов, при соединении образующих центральное посадочное отверстие для размещения передней части корпуса видеокамеры, при этом каждый из элементов выполнен со стяжными «ушками» для соединения полухомутов между собой с обеспечением фиксации видеокамеры в центральном посадочном отверстии и крепления к боковым пластинам и снабжен двумя выступающими площадками с отверстиями и прорезями для фиксации двух лазерных целеуказателей.
2. Узел крепления по п. 1, характеризующийся тем, что для углового перемещения оснований с закрепленными в них видеокамерой и лазерными целеуказателями в плоскости, параллельной боковым пластинам, боковые пластины выполнены с двумя сквозными дугообразными прорезями, обеспечивающими поворот хомутов с закрепленными в них видеокамерой на угол не более 90°, а также отверстиями для крепления к раме буксируемого устройства.
3. Узел крепления по п. 1, характеризующийся тем, что выступающие площадки полухомутов выполнены с обеспечением размещения в хомуте четырех лазерных целеуказателей на равноудаленном расстоянии друг от друга с параллельным расположением их оптических осей.
4. Узел крепления по п. 2, характеризующийся тем, что крепление оснований к боковым пластинам реализовано посредством уголков, каждый из которых снабжен двумя крепежными отверстиями, одно из которых выполнено на одной стороне уголка и предназначено для соединения с боковой пластиной в месте размещения дугообразной прорези, второе крепежное отверстие выполнено на второй стороне уголка и имеет протяженную форму для обеспечения соединения с «ушками» хомута.
5. Узел крепления по п. 1, характеризующийся тем, что центры отверстий для целеуказателей расположены на расстоянии 160-170 мм от фокусной точки видеокамеры или на расстоянии 20-30 мм от корпуса камеры.
6. Узел крепления по п. 1, характеризующийся тем, что полухомуты со стороны посадочного отверстия для видеокамеры снабжены кольцевым пазом с размещенным в нем уплотнительным материалом для обеспечения плотной фиксации корпуса видеокамеры в основании.
7. Узел крепления по п. 1, характеризующийся тем, что хомуты выполнены из полиэтилена высокого давления толщиной 10-20 мм для обеспечения гальванической развязки между рамной конструкцией и корпусом видеокамеры.
8. Оптический блок буксируемого устройства для картографирования объектов морского дна и их визуальной заверки, включающий узел крепления в буксируемом устройстве, выполненный по п. 1, в котором в переднем и заднем основаниях закреплена видеокамера, а в отверстиях выступающих площадок переднего основания закреплены четыре лазерных целеуказателя с обеспечением параллельного размещения оптических осей лазерных целеуказателей и видеокамеры.
9. Оптический блок по п. 1, характеризующийся тем, что видеокамера и лазерные целеуказатели герметично размещены в отдельных цилиндрических корпусах, выполненных из алюминиевого сплава с толщиной стенок не менее 5 мм.
| Пиковый детектор | 1956 |
|
SU106965A1 |
| БУКСИРУЕМОЕ УСТРОЙСТВО ДЛЯ КАРТОГРАФИРОВАНИЯ ОБЪЕКТОВ МОРСКОГО ДНА И ИХ ВИЗУАЛЬНОЙ ЗАВЕРКИ | 2018 |
|
RU2679922C1 |
| ПРИВОД ГОРИЗОНТАЛЬНОЙ МАШИНЫ для | 0 |
|
SU178062A1 |
| US 20070242134 A1, 18.10.2007 | |||
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ДЛЯ ВЫПОЛНЕНИЯ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2000 |
|
RU2220880C2 |

