Область техники, к которой относится изобретение
Настоящее изобретение относится к резонаторному механизму с гибкой направляющей, оснащенному средствами регулирования жесткости, в частности, для часового дела.
Уровень техники
Большинство современных механических часов оснащены балансом с пружиной и швейцарским спусковым механизмом. Баланс с пружиной является составной частью задающего генератора часов. Он также именуется резонатором.
Что касается спускового механизма, он выполняет две основные функции:
- поддержание возвратно-поступательного движения резонатора;
- подсчет указанных возвратно-поступательных движений.
Для создания механического резонатора необходимы инерционный элемент, направляющая и упругий возвратный элемент. Как правило, роль упругого возвратного элемента для инерционного элемента выполняет волосок, который является составной частью баланса. Этот баланс направляется с возможностью вращения с помощью цапф, которые вращаются в рубиновых подшипниках.
Гибкие направляющие в настоящее время используются в качестве пружин для формирования виртуальной оси. Гибкие направляющие с виртуальной осью позволяют значительно усовершенствовать резонаторы часов. Самыми простыми являются оси с перекрещенными лентами, состоящие из двух направляющих устройств с прямыми лентами, которые перекрещиваются по существу перпендикулярно. Эти две ленты могут быть или трехмерными, располагаясь в двух различных плоскостях, или двухмерными, располагаясь в одной и той же плоскости, и спаиваются в точке перекрещивания. Однако существуют направляющие с неперекрещенными лентами RCC-типа (с удаленным центром соответствия), имеющие прямые ленты, которые не пересекаются. Такой резонатор описан в документе EP 2911012 или в документах EP14199039 и EP16155039.
Для функционирования системы баланса с пружиной должна быть предусмотрена возможность регулирования для повышения точности часов. С этой целью используются средства регулирования жесткости волоска, такие как фиксатор для изменения расчетной длины пружины. Таким образом, ее жесткость изменяется для регулирования точности хода часов. Однако эффект стандартного фиксатора для регулирования хода остается ограниченным, и он не всегда эффективен для выполнения достаточно точного регулирования, порядка нескольких секунд или нескольких десятков секунд в день.
В случае гибкой направляющей существуют средства регулирования, содержащие один или несколько винтов, расположенных в ободке баланса. В результате воздействия на винты изменяется инерция баланса, что оказывает влияние на изменение хода.
Однако, несмотря на значительный диапазон регулирования, получаемый с помощью указанных винтов, не обеспечивается тонкая регулировка. Таким образом, сложно достигнуть точности хода.
Раскрытие сущности изобретения
Задача настоящего изобретения состоит в том, чтобы устранить все или часть упомянутых выше недостатков с помощью часового резонаторного механизма с гибкой направляющей, оснащенного средствами точного регулирования.
С этой целью изобретение относится к вращающемуся резонаторному механизму, в частности, для часового дела, причем резонаторный механизм содержит гибкую направляющую и колеблющуюся массу, при этом гибкая направляющая содержит две гибкие ленты и жесткий участок, причем гибкие ленты с одной стороны соединены с жестким участком гибкой направляющей, а с другой стороны – с колеблющейся массой.
Настоящее изобретение отличается тем, что механизм содержит средства регулирования жесткости резонаторного механизма, причем средства регулирования содержат гибкий элемент, расположенный последовательно с гибкой направляющей, при этом гибкий элемент с одной стороны соединен с жестким участком гибкой направляющей, а с другой стороны – с неподвижной опорой, так что гибкая направляющая подвешена с помощью гибкого элемента, причем гибкий элемент образует шарнир, что позволяет жесткому участку выполнять вращательное движение, при этом гибкая направляющая и гибкий элемент продолжаются по существу в одной и той же плоскости, что позволяет колеблющейся массе выполнять вращательное движение вокруг виртуальной оси, причем средства регулирования дополнительно содержат средства создания предварительного напряжения для прикладывания переменного усилия или крутящего момента к гибкому элементу или гибкой направляющей так, чтобы изменять жесткость гибкого элемента.
С помощью изобретения благодаря воздействию на средства создания предварительного напряжения изменяется усилие или крутящий момент, прикладываемый к гибкому элементу, что ведет к изменению жесткости узла, содержащего гибкий элемент и гибкую направляющую. Фактически, гибкий элемент, расположенный последовательно с гибкой направляющей, создает дополнительную жесткость, которая добавляется к жесткости гибкой направляющей. Таким образом, когда средства создания предварительного напряжения прикладывают переменное усилие или крутящий момент к гибкому элементу, они изменяют жесткость гибкого элемента и, следовательно, узла, содержащего гибкую направляющую и гибкий элемент.
Другими словами, гибкий элемент расположен последовательно с гибкой направляющей между гибкой направляющей и неподвижной опорой. Этот гибкий элемент изменяет жесткость точки крепления и придает дополнительную гибкость резонатору. Таким образом, фактическая жесткость резонатора содержит жесткость гибкой направляющей и жесткость гибкого элемента. В результате переменное усилие или крутящий момент прикладывается для создания предварительного напряжения в гибком элементе без создания предварительного напряжения в гибкой направляющей и без перемещения гибкой направляющей. Благодаря созданию предварительного напряжения в гибком элементе его жесткость изменяется, в то время как жесткость гибкой направляющей остается неизменной, поскольку в ней не создается предварительное напряжение и ее конец не перемещается. В результате изменения жесткости гибкого элемента изменяется жесткость резонатора (жесткость гибкой направляющей и жесткость гибкого элемента), что, соответственно, изменяет ход резонатора. Гибкий элемент, предпочтительно, является более жестким по сравнению с гибкой направляющей, при этом доля жесткости гибкого элемента в суммарной жесткости меньше, чем доля жесткости гибкой направляющей. Соответственно, изменение жесткости гибкого элемента изменяет жесткость узла резонатора и, соответственно, обеспечивает тонкое регулирование его хода, что позволяет точно регулировать частоту задающего генератора часов. Таким образом, обеспечивается высокая точность регулирования хода, поскольку для регулирования жесткости воздействие оказывается только на один элемент.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения изменяют только жесткость гибкого элемента без изменения жесткости основных гибких лент.
Согласно частному варианту осуществления изобретения гибкий элемент содержит по меньшей мере одну вторую гибкую ленту, предпочтительно две вторые гибкие ленты, причем каждая вторая гибкая лента соединена с неподвижной опорой.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения содержат валики, которые контактируют со вторыми гибкими лентами.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения прикладывают переменное усилие или крутящий момент ко вторым гибким лентам.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения прикладывают переменное усилие или крутящий момент к жесткому участку гибкой направляющей.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения содержат первый подвижный элемент и по меньшей мере одну третью гибкую ленту, соединенную с первым подвижным элементом и с жестким участком гибкой направляющей или с жестким элементом.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения содержат множество четвертых гибких лент и второй подвижный элемент, причем четвертые гибкие ленты соединяют второй подвижный элемент с первым подвижным элементом.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения содержат по меньшей мере одну пятую гибкую ленту, соединяющую второй подвижный элемент или первый подвижный элемент с неподвижной опорой.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения содержат эксцентриковый винт, который находится в контакте со вторым подвижным элементом или жестким участком.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения содержат винт, давящий в продольном направлении на второй подвижный элемент.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения содержат рычаг для перемещения второго подвижного элемента.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения содержат первый магнит, жестко соединенный с жестким участком или со вторым подвижным элементом, и второй магнит, перемещающийся относительно первого магнита.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения содержат пружину, соединенную с жестким участком, и подвижный элемент для растягивания или сжатия пружины.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения расположены в той же плоскости, что и гибкая направляющая и гибкий элемент.
Согласно частному варианту осуществления изобретения средства создания предварительного напряжения расположены в плоскости, по существу параллельной плоскости гибкой направляющей и гибкого элемента.
Согласно частному варианту осуществления изобретения гибкий элемент содержит третий подвижный элемент и множество шестых гибких лент, соединяющих третий подвижный элемент с жестким участком.
Согласно частному варианту осуществления изобретения гибкий элемент содержит четвертый подвижный элемент и множество седьмых лент, соединяющих третий подвижный элемент с четвертым подвижным элементом.
Согласно частному варианту осуществления изобретения третья гибкая лента соединена с четвертым подвижным элементом.
Согласно частному варианту осуществления изобретения две основные ленты гибкой направляющей перекрещиваются.
Согласно частному варианту осуществления изобретения гибкий элемент имеет жесткость, превышающую жесткость гибкой направляющей, предпочтительно по меньшей мере в пять раз, или даже по меньшей мере в десять раз.
Изобретение также относится к часовому механизму, содержащему такой резонаторный механизм.
Краткое описание чертежей
Задачи, преимущества и признаки настоящего изобретения станут понятными из ряда вариантов осуществления, приведенных только в качестве неограничивающих примеров со ссылкой на приложенные чертежи.
На фиг. 1 показан схематический вид сверху резонаторного механизма согласно первому варианту осуществления изобретения;
на фиг. 2 – схематический вид сверху резонаторного механизма согласно первой модификации первого варианта осуществления изобретения;
на фиг. 3 – схематический вид сверху резонаторного механизма согласно второму варианту осуществления изобретения;
на фиг. 4 – схематический вид сверху резонаторного механизма согласно первой модификации второго варианта осуществления изобретения;
на фиг. 5 – схематический вид сверху резонаторного механизма согласно второй модификации второго варианта осуществления изобретения;
на фиг. 6 – схематический вид сверху резонаторного механизма согласно третьей модификации второго варианта осуществления изобретения;
на фиг. 7 – схематический вид сверху резонаторного механизма согласно четвертой модификации второго варианта осуществления изобретения;
на фиг. 8 – схематический вид сверху резонаторного механизма согласно пятой модификации второго варианта осуществления изобретения;
на фиг. 9 – схематический вид сверху резонаторного механизма согласно шестой модификации второго варианта осуществления изобретения;
на фиг. 10 – схематический вид сверху резонаторного механизма согласно седьмой модификации второго варианта осуществления изобретения;
на фиг. 11 – схематический вид сверху резонаторного механизма согласно третьему варианту осуществления изобретения;
на фиг. 12 – схематический вид сверху резонаторного механизма согласно первой модификации третьего варианта осуществления изобретения;
на фиг. 13 – схематический вид сверху резонаторного механизма согласно второй модификации третьего варианта осуществления изобретения;
на фиг. 14 – схематический вид сверху резонаторного механизма согласно третьей модификации третьего варианта осуществления изобретения;
на фиг. 15 – схематический вид сверху резонаторного механизма согласно четвертой модификации третьего варианта осуществления изобретения.
Осуществление изобретения
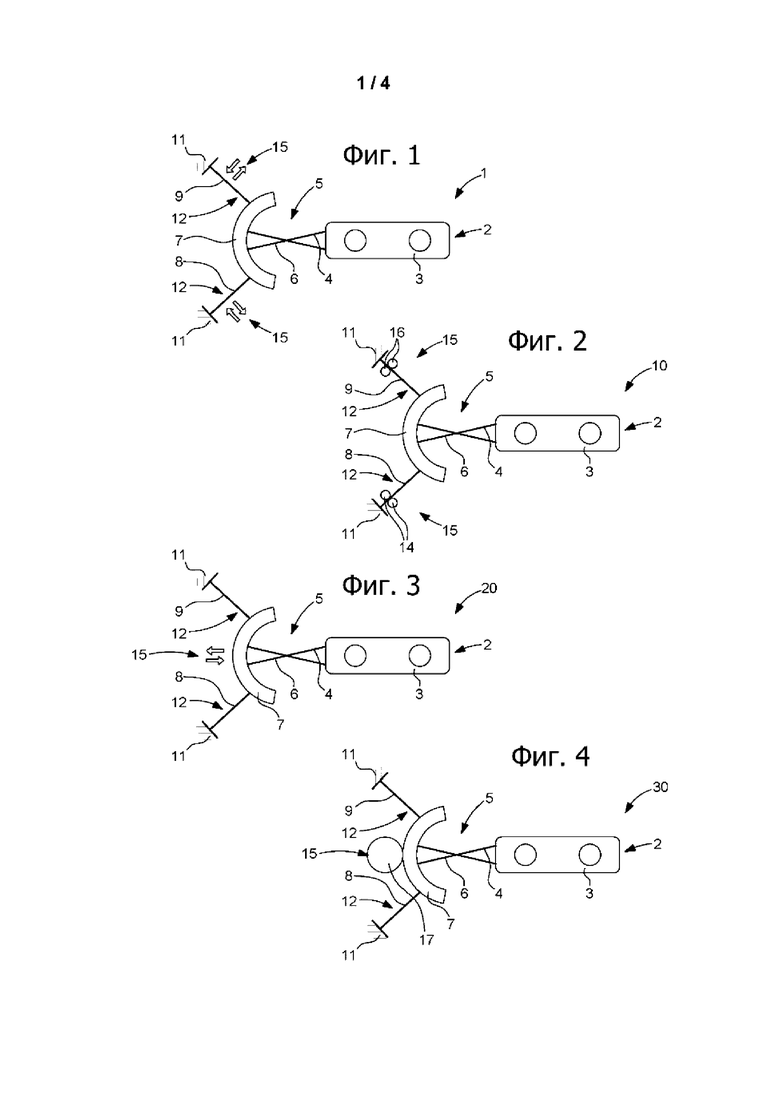
На фиг. 1–15 показаны три варианта выполнения резонаторного механизма 1, 10, 20, 30, 40, 50, 60, 70, 80, 90, 100, 110, 120, 130, 140, в частности, для часового дела, которые содержат гибкую направляющую 5 и колеблющуюся массу 2. Колеблющаяся масса 2 содержит крепежный элемент 3 и баланс (не показан на фигурах), например кольцеобразный баланс или костевидный прямой элемент, обычно используемый в часовом деле, который установлен на крепежном элементе 3. Крепежный элемент 3 имеет удлиненную прямоугольную форму. Резонаторный механизм продолжается по существу в одной и той же плоскости, что позволяет колеблющейся массе 2 выполнять вращательное движение вокруг виртуальной оси.
Гибкая направляющая 5 содержит две основные гибкие ленты 4, 6 и жесткий участок 7. Гибкая направляющая 5 продолжается по основной оси симметрии. Гибкие ленты 4, 6 соединены с одной стороны с жестким участком 7 гибкой направляющей 5, а с другой стороны – с крепежным элементом 3 колеблющейся массы 2. Две основные ленты 4, 6 гибкой направляющей 5 перекрещиваются, предпочтительно, являются прямыми и имеют одинаковую длину.
Согласно изобретению резонаторный механизм 1 содержит средства регулирования жесткости резонаторного механизма. С этой целью средства регулирования содержат гибкий элемент 12, расположенный последовательно с гибкой направляющей 5, причем гибкий элемент 12 соединен с одной стороны с жестким участком 7 гибкой направляющей, а с другой стороны – с неподвижной опорой 11, так что гибкая направляющая 5 подвешена с помощью гибкого элемента 12, причем гибкий элемент 12 образует шарнир, что позволяет жесткому участку 7 выполнять вращательное движение. Таким образом, жесткий участок 7 выполняет вращательное движение с помощью гибкого элемента 12. Вращательное движение жесткого элемента 7 добавляется к вращательному движению колеблющейся массы 2, создаваемому гибким элементом 5, так что угловое перемещение колеблющейся массы увеличивается с помощью гибкого элемента 12.
Кроме того, средства 15 создания предварительного напряжения будут изменять только жесткость гибкого элемента 12 без изменения жесткости основных гибких лент 4, 6. Таким образом, для регулирования резонаторного механизма в действие приводится только один элемент для упрощения регулирования. Кроме того, положение основных гибких лент не изменяется благодаря использованию средств 15 создания предварительного напряжения.
В первых двух вариантах осуществления изобретения жесткий участок 7 выполнен в виде дуги окружности, содержащей внутреннюю сторону, с которой соединены основные ленты 4, 6, предпочтительно симметрично относительно центра дуги окружности. Гибкий элемент 12 содержит по меньшей мере одну вторую гибкую ленту, в данном случае две вторые гибкие ленты 8, 9. Предпочтительно, вторые гибкие ленты 8, 9 являются прямыми и имеют одинаковую длину. Каждая вторая гибкая лента 8, 9 соединяет наружную сторону дуги окружности жесткого участка 7 гибкой направляющей 5 и неподвижную опору 11. Вторые гибкие ленты 8, 9, предпочтительно, расположены рядом с каждым концом дуги окружности симметрично относительно оси гибкой направляющей 5.
Средства регулирования также содержат средства 15 создания предварительного напряжения для прикладывания переменного усилия или крутящего момента к гибкому элементу 12 или гибкой направляющей так, чтобы изменять жесткость гибкого элемента 12.
Во второй модификации первого варианта осуществления изобретения средства 15 создания предварительного напряжения содержат валики, которые контактируют со вторыми гибкими лентами.
На фиг. 1 и 2 схематически показан первый вариант выполнения вращающегося резонаторного механизма 1 для часового механизма. Как показано на фиг. 1, на которой представлен принцип действия, средства 15 создания предварительного напряжения прикладывают переменное усилие или крутящий момент к гибкому элементу 12. В данном случае средства 15 создания предварительного напряжения прикладывают переменное усилие или крутящий момент ко вторым гибким лентам 8, 9. Таким образом, жесткость вторых гибких лент 8, 9 изменяется для регулирования жесткости узла, образованного гибким элементом 12 и гибкой направляющей 5.
В модификации, показанной на фиг. 2, средства 15 создания предварительного напряжения содержат валики 14, 16, в данном случае две пары валиков, причем валики каждой пары расположены с обеих сторон каждой второй гибкой ленты 8, 9. Два валика 14, 16 находятся в контакте со вторыми гибкими лентами 8, 9 и могут перемещаться вдоль каждой ленты 8, 9 для изменения ее жесткости. Таким образом, перемещение валиков 14, 16 позволяет изменять жесткость узла, образованного вторыми гибкими лентами 8, 9 и гибкой направляющей 5, для регулирования точности хода резонаторного механизма 1.
На фиг. 3 проиллюстрирован принцип действия второго варианта выполнения резонаторного механизма 1. Средства 15 создания предварительного напряжения прикладывают переменное усилие или крутящий момент к гибкой направляющей 5, в частности к жесткому участку 7 гибкой направляющей 5. Таким образом, такая компоновка позволяет изменять как жесткость основных гибких лент 4, 6 гибкой направляющей 5, так и вторых гибких лент 8, 9 гибкого элемента 12.
На фиг. 4 показана первая модификация второго варианта осуществления изобретения, в которой средства 15 создания предварительного напряжения содержат эксцентриковый винт 17 с головкой, расположенной в контакте с жестким участком 7 гибкой направляющей 5. Таким образом, за счет приведения в действие эксцентрикового винта 17 изменяется усилие или крутящий момент, прикладываемые к жесткому участку 7.
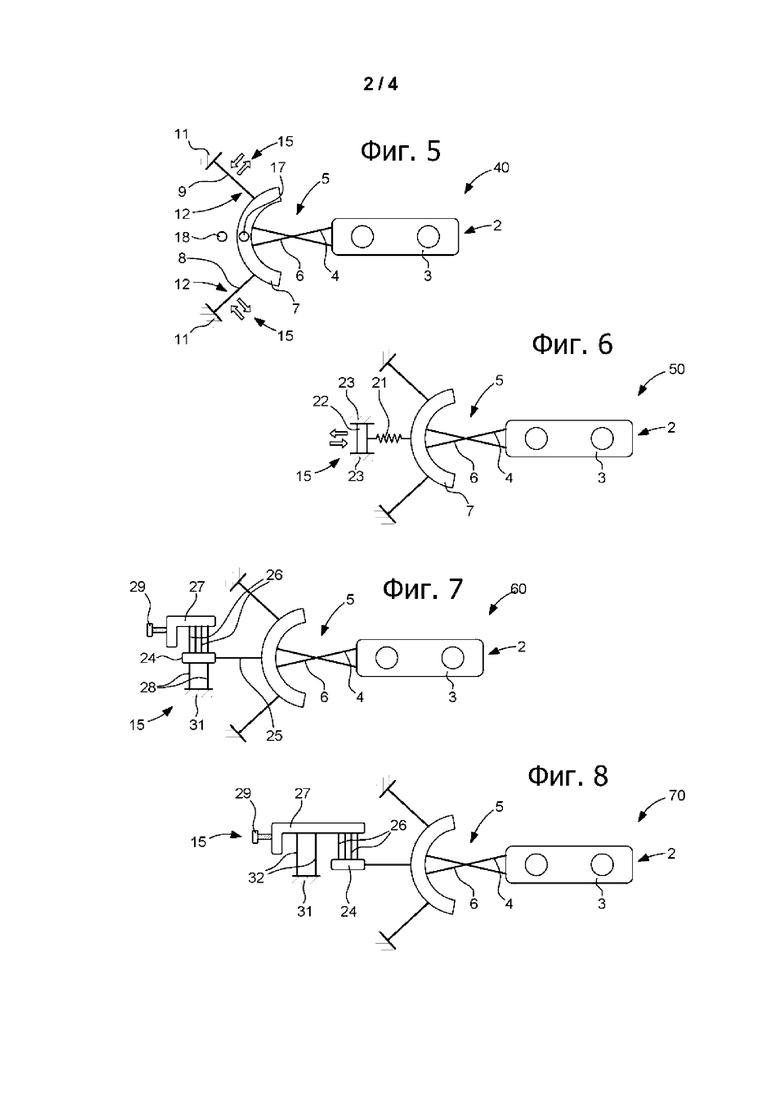
Во второй модификации второго варианта осуществления изобретения средства 15 создания предварительного напряжения содержат магниты 17, 18. Первый магнит 17 расположен на жестком участке 7 гибкой направляющей 5, а второй, подвижный магнит 18 расположен на изменяемом расстоянии от первого магнита 17, так что он прикладывает переменное усилие или крутящий момент к первому магниту 17 и, следовательно, к жесткому участку 7.
В третьей модификации, показанной на фиг. 6, средства 15 создания предварительного напряжения содержат пружину 21 и подвижный элемент 22, соединенный пружиной 21 с жестким участком 7 гибкой направляющей 5. Таким образом, за счет перемещения подвижного элемента 22 пружина 21 растягивается или сжимается для изменения усилия или крутящего момента, прикладываемого к жесткому участку 7.
В модификациях второго варианта осуществления изобретения, показанных на фиг. 7–10, средства 15 создания предварительного напряжения содержат первый подвижный элемент 24 и третью гибкую ленту 25, установленную последовательно с жестким участком 7 и первым подвижным элементом 24, предпочтительно по оси симметрии гибкой направляющей. Первый подвижный элемент 24, предпочтительно, имеет удлиненную форму и расположен вдоль оси третьей гибкой ленты 25.
Средства 15 создания предварительного напряжения содержат второй подвижный элемент 27 в форме угольника, а также четвертые гибкие ленты 26, в рассматриваемом случае четыре, соединяющие два подвижных элемента 24, 27. Четыре четвертые ленты 26, предпочтительно, по существу перпендикулярны третьей ленте 25 в исходном положении средства 15 создания предварительного напряжения. Четвертые гибкие ленты 26, предпочтительно, параллельны.
На фиг. 7 средства 15 создания предварительного напряжения согласно четвертой модификации резонаторного механизма 60 также содержат две пятые ленты 28, соединяющие первый подвижный элемент 24 с неподвижной опорой 31. Пятые гибкие ленты 28, предпочтительно, параллельны. Пятые ленты 28 по существу параллельны четвертым лентам 26 и расположены с противоположной стороны первого подвижного элемента 24. Средства 15 создания предварительного напряжения также содержат винт 29, который расположен в продольном направлении и контактирует со вторым подвижным элементом 27 для прикладывания переменного усилия или крутящего момента. За счет прикладывания переменного усилия или крутящего момента ко второму подвижному элементу 27 изменяется жесткость резонаторного механизма 60.
В пятой модификации резонаторного механизма 70, показанной на фиг. 8, средства 15 создания предварительного напряжения также содержат две пятые ленты 32, соединяющие второй подвижный элемент 27 с неподвижной опорой 31. Пятые ленты 32 по существу параллельны четвертым лентам 26 и расположены на той же самой стороне второго элемента. Средства 15 создания предварительного напряжения также содержат винт 29, который расположен в продольном направлении и контактирует со вторым подвижным элементом 27 для прикладывания переменного усилия или крутящего момента. За счет прикладывания переменного усилия или крутящего момента ко второму подвижному элементу 27 изменяется жесткость резонаторного механизма 70.
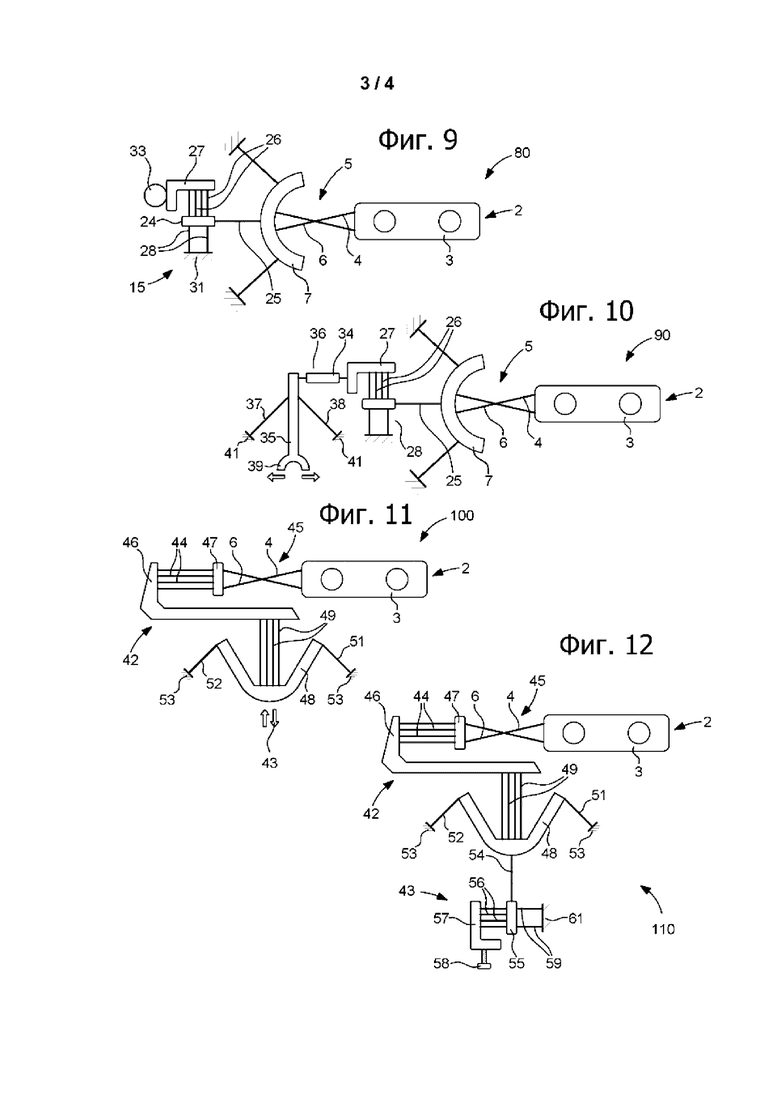
Шестая 80 и седьмая 90 модификации резонаторного механизма второго варианта осуществления изобретения, показанные на фиг. 9 и 10, являются сходными с четвертой модификацией второго варианта осуществления изобретения, показанной на фиг. 7, за исключением того, что винт, установленный в продольном направлении, заменен другими средствами для прикладывания усилия или крутящего момента.
На фиг. 9 средства 15 создания предварительного напряжения содержат эксцентриковый винт 33, головка которого контактирует со вторым подвижным элементом 27. Таким образом, за счет вращения винта изменяется усилие или крутящий момент, прикладываемые ко второму подвижному элементу 27.
В седьмой модификации резонаторного механизма 90, показанной на фиг. 10, средства 15 создания предварительного напряжения содержат рычаг 35, соединенный со вторым подвижным элементом 27 шестой гибкой лентой 36, имеющей жесткий центральный участок 34. Шестая гибкая лента 36 по существу параллельна третьей гибкой ленте 25 в сходном положении средств 15 создания предварительного напряжения. Рычаг 35 расположен перпендикулярно шестой гибкой ленте 36. Рычаг 35 также соединен со второй неподвижной опорой двумя седьмыми лентами 37, 38, расположенными с обеих сторон рычага 35. Свободный конец 39 рычага 35 имеет U-образную форму, что позволяет воздействовать на него в боковом направлении для прикладывания переменного усилия или крутящего момента к гибкому элементу 12.
В третьем варианте осуществления изобретения, показанном на фиг. 11–15, жесткий элемент 47 гибкой направляющей 45 является удлиненным и расположен перпендикулярно оси гибкой направляющей 45. Гибкий элемент 42 содержит по меньшей мере одну шестую гибкую ленту 44, в данном случае четыре шестые гибкие ленты 44, и третий L-образный подвижный элемент 46. Шестые гибкие ленты 44 расположены параллельно оси гибкой направляющей 45 и соединяют жесткий участок 47 гибкой направляющей 45 с внутренней стороной основания L-образного подвижного элемента. Полка L-образного подвижного элемента продолжается параллельно шестым гибким лентам 44 в исходном состоянии гибкого элемента 45. Гибкий элемент 42 также содержит четвертый гибкий подвижный элемент 48 и по меньшей мере одну седьмую гибкую ленту 49, в данном случае четыре седьмые гибкие ленты. Четвертый подвижный элемент 48 имеет широкую U-образную форму, внутренняя сторона которой обращена к наружной стороне полки L-образного подвижного элемента. Седьмые ленты 49 соединяют наружную сторону полки L-образного подвижного элемента с внутренней стороной основания U-образного подвижного элемента и по существу перпендикулярны шестым гибким лентам 44.
Гибкий элемент также содержит по меньшей мере одну вторую гибкую ленту 51, 52, в данном случае две вторые гибкие ленты, соединяющие широкие концы U-образного подвижного элемента с неподвижной опорой 53 резонаторного механизма 100.
Средства 43 создания предварительного напряжения выполнены с возможностью прикладывания усилия или крутящего момента к U-образному подвижному элементу.
В первой модификации резонаторного механизма 110 третьего варианта осуществления изобретения, показанной на фиг. 12, средства 43 создания предварительного напряжения дополнительно содержат первый подвижный элемент 55 и третью гибкую ленту 54, установленную последовательно с жестким участком 47 гибкой направляющей 45 и с первым подвижным элементом 55, предпочтительно перпендикулярно оси симметрии гибкой направляющей 45. Первый подвижный элемент 55, предпочтительно, имеет удлиненную форму и расположен на оси третьей гибкой ленты 54.
Средства 43 создания предварительного напряжения содержат второй подвижный элемент 57 в форме угольника, а также четвертые гибкие ленты 56, соединяющие первый 55 и второй 57 подвижные элементы. В рассматриваемом случае четыре четвертые ленты 56 по существу перпендикулярны третьей ленте 54 в исходном положении средств 43 создания предварительного напряжения. Четвертые гибкие ленты 56, предпочтительно, параллельны.
Средства 43 создания предварительного напряжения также содержат две пятые гибкие ленты 59, соединяющие первый подвижный элемент 55 с неподвижной опорой 61. Пятые гибкие ленты 59, предпочтительно, параллельны. Пятые ленты 59 по существу перпендикулярны третьей гибкой ленте 54 и расположены относительно первого подвижного элемента 55 на стороне, противоположной стороне расположения четвертых гибких лент 56. Средства 43 создания предварительного напряжения также содержат винт 58, который расположен в продольном направлении и контактирует со вторым подвижным элементом 57 для прикладывания переменного усилия или крутящего момента. За счет прикладывания переменного усилия или крутящего момента ко второму подвижному элементу 57 изменяется жесткость резонаторного механизма 110.
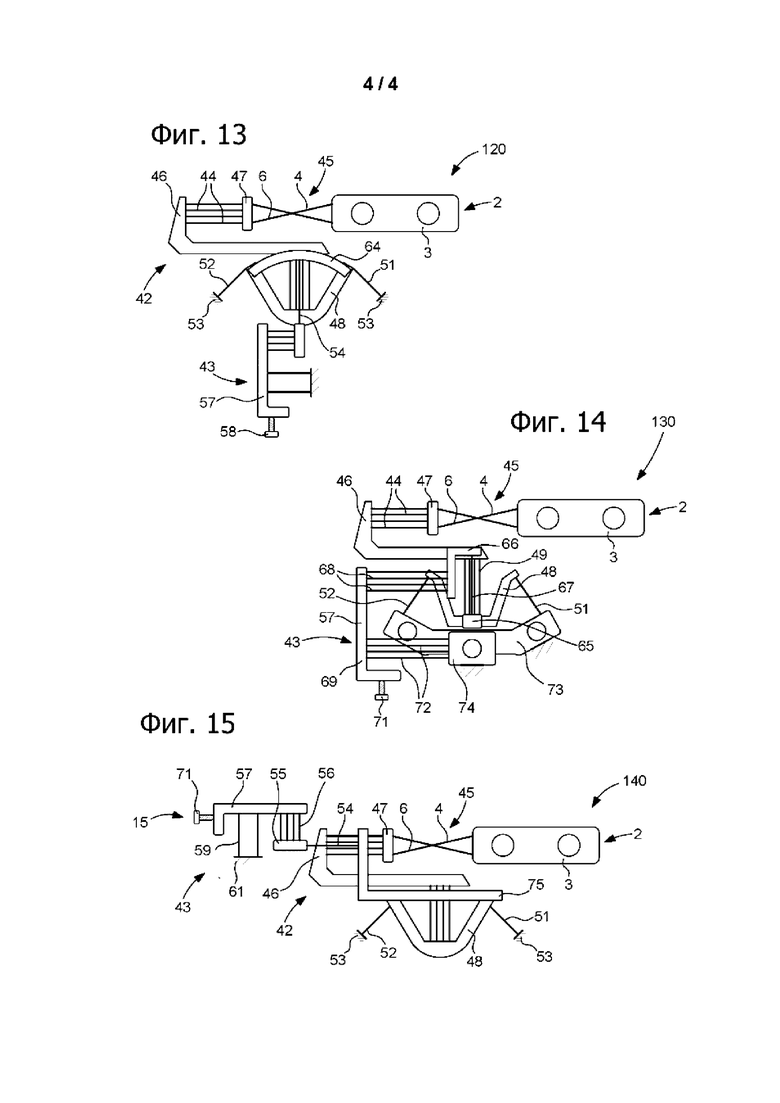
Во второй модификации резонаторного механизма 120 третьего варианта осуществления изобретения, показанной на фиг. 13, средства 43 создания предварительного напряжения являются сходными со средствами создания предварительного напряжения согласно первой модификации, но смещены к гибкой направляющей 45. Гибкий элемент 42 дополнительно содержит промежуточный элемент 64, к которому присоединена третья гибкая лента 54. Промежуточный элемент 64 имеет форму дуги окружности и установлен на широких концах U-образного четвертого подвижного элемента 48. Третья гибкая лента 54 соединена с внутренней стороной дуги окружности. Таким образом, средства 43 создания предварительного напряжения расположены в плоскости, по существу параллельной плоскости гибкой направляющей 45 и гибкого элемента 42.
В третьей модификации резонаторного механизма 130 третьего варианта осуществления изобретения, показанной на фиг. 14, средства 43 создания предварительного напряжения содержат колонку 65, установленную на основании U-образного четвертого подвижного элемента 48, первый L-образный подвижный элемент 66 и третью гибкую ленту 67, соединяющую колонку 65 с внутренней стороной основания L-образного подвижного элемента. Третья гибкая лента 67, предпочтительно, расположена над седьмыми гибкими лентами 49. Средства 43 создания предварительного напряжения также содержат второй L-образный подвижный элемент 69 и четвертые гибкие ленты 68, причем четвертые гибкие ленты 68 соединяют наружную сторону полки первого L-образного подвижного элемента 66 с внутренней стороной полки второго L-образного подвижного элемента 69. Четвертые гибкие ленты 68, предпочтительно, параллельны.
Средства 43 создания предварительного напряжения также содержат по меньшей мере одну пятую гибкую ленту 72, предпочтительно четыре пятые гибкие ленты 72, соединяющую внутреннюю сторону второго L-образного подвижного элемента 69 с неподвижной опорой 73. Пятые гибкие ленты 72, предпочтительно, параллельны. Неподвижная опора 73 имеет форму дуги окружности, на концах которой присоединены вторые гибкие ленты 51, 52. Неподвижная опора 73 также содержит дополнительную центральную секцию 74, к которой присоединены пятые ленты 72.
Средства 43 создания предварительного напряжения также содержат винт 71, который расположен в продольном направлении и контактирует со вторым подвижным элементом 69 для прикладывания переменного усилия или крутящего момента. За счет прикладывания переменного усилия или крутящего момента ко второму подвижному элементу 69 изменяется жесткость резонаторного механизма 130.
Колонка 65, третья гибкая лента 67, первый подвижный элемент 66, четвертые гибкие ленты 68, второй подвижный элемент 69, пятые гибкие ленты 72, винт 71 и дополнительный центральный участок 74 расположены на верхнем уровне резонаторного механизма 130, причем указанный уровень расположен в плоскости, по существу параллельной плоскости, содержащей другие части механизма 130.
Четвертая модификация резонаторного механизма 140 третьего варианта осуществления изобретения, показанная на фиг. 15, является сходной со второй модификацией за исключением промежуточного элемента 75, который имеет L-образную форму. Полка указанного L-образного промежуточного элемента установлена на четвертом U-образном подвижном элементе 48, в то время как основание L-образного промежуточного элемента расположено над гибким элементом 42. Третья гибкая лента 54 соединена со свободным концом L-образного элемента с наружной стороны. Таким образом, винт 71, первый подвижный элемент 55 и второй подвижный элемент 57, а также четвертые 56 и пятые 59 ленты расположены перпендикулярно относительно их соответствующих положений во второй модификации второго варианта осуществления изобретения.
В описанных вариантах осуществления изобретения гибкие ленты, предпочтительно, являются прямыми. Кроме того, гибкие ленты одного и того же типа, предпочтительно, имеют одинаковую длину. Гибкие ленты могут быть непрерывно гибкими или могут иметь только гибкие участки.
Изобретение также относится к часовому механизму, не показанному на фигурах, причем указанный механизм содержит вращающийся резонаторный механизм 10, 20, 30, 40, 50, 60, 70, 80, 90, 100, 110, 120, 130, 140, как описано выше.
Разумеется, изобретение не ограничивается вариантами осуществления, описанными со ссылкой на чертежи, и могут быть предусмотрены их модификации без отклонения от объема изобретения.
Использование: изобретение относится к вращающемуся резонаторному механизму (60), в частности, для часового дела. Сущность: вращающийся резонаторный механизм содержит гибкую направляющую (5) и колеблющуюся массу (2), причем гибкая направляющая (5) содержит две основные гибкие ленты (4, 6) и жесткий участок (7), при этом основные гибкие ленты (4, 6) с одной стороны соединены с жестким участком (7) гибкой направляющей (5), а с другой стороны – с колеблющейся массой (2), причем резонаторный механизм (60) содержит средства регулирования жесткости резонаторного механизма (60), при этом средства регулирования содержат гибкий элемент, соединенный с одной стороны с жестким участком (7) гибкой направляющей (5), а с другой стороны – с неподвижной опорой (11), так что гибкая направляющая (5) подвешена с помощью гибкого элемента (12), при этом гибкая направляющая (5) и гибкий элемент (12) продолжаются по существу в одной и той же плоскости, что позволяет колеблющейся массе (2) выполнять вращательное движение вокруг виртуальной оси, причем средства регулирования дополнительно содержат средства (15) создания предварительного напряжения для прикладывания переменного усилия или крутящего момента к гибкому элементу (12) или гибкой направляющей (5) так, чтобы изменять жесткость гибкого элемента (12). Изобретение также относится к часовому механизму, содержащему такой резонаторный механизм (1). Технический результат: повышение точности регулирования хода за счет точного регулирования частоты задающего генератора часов. 2 н. и 22 з.п. ф-лы, 15 ил.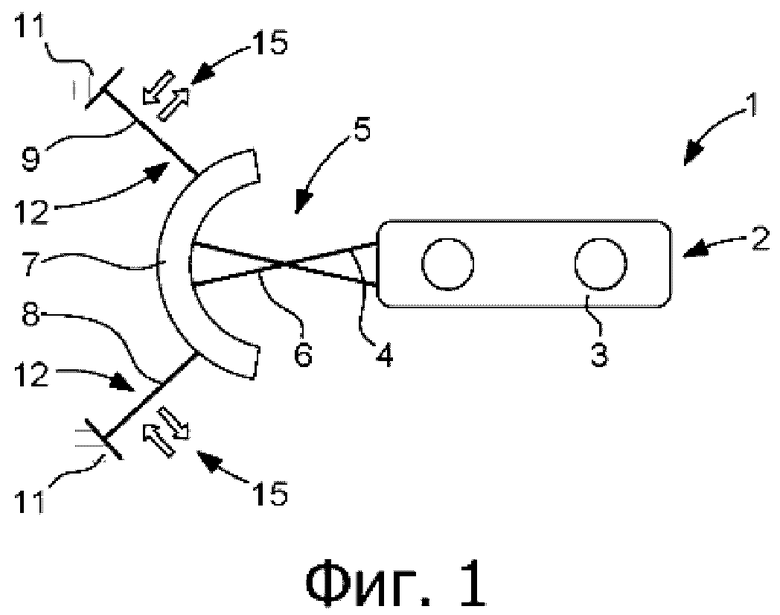
1. Вращающийся резонаторный механизм (1, 10, 20, 30, 40, 50, 60, 70, 80, 90, 100, 110, 120, 130, 140), в частности, для часового дела, содержащий гибкую направляющую (5, 45) и колеблющуюся массу (2), причем гибкая направляющая (5, 45) содержит по меньшей мере две основные гибкие ленты (4, 6) и жесткий участок (7, 47), при этом основные гибкие ленты (4, 6) с одной стороны соединены с жестким участком (7, 47) гибкой направляющей (5, 45), а с другой стороны – с колеблющейся массой (2), отличающийся тем, что он содержит средства регулирования жесткости резонаторного механизма (1, 10, 20, 30, 40, 50, 60, 70, 80, 90, 100, 110, 120, 130, 140), причем средства регулирования содержат гибкий элемент (12, 42), расположенный последовательно с гибкой направляющей (5, 45), при этом гибкий элемент (12, 42) с одной стороны соединен с жестким участком (7, 47) гибкой направляющей (5, 45), а с другой стороны – с неподвижной опорой (11, 53), так что гибкая направляющая (5, 45) подвешена с помощью гибкого элемента (12, 42), причем гибкий элемент (12, 42) образует шарнир, что позволяет жесткому участку (7, 47) выполнять вращательное движение, при этом гибкая направляющая (5, 45) и гибкий элемент (12, 42) продолжаются по существу в одной и той же плоскости, что позволяет колеблющейся массе (2) выполнять вращательное движение вокруг виртуальной оси, причем средства регулирования дополнительно содержат средства (15, 43) создания предварительного напряжения для прикладывания переменного усилия или крутящего момента к гибкому элементу (12, 42) или гибкой направляющей (5, 45) так, чтобы изменять жесткость гибкого элемента (12, 42).
2. Резонаторный механизм по п. 1, отличающийся тем, что средства (15, 43) создания предварительного напряжения выполнены с возможностью изменения только жесткости гибкого элемента (12, 42) без изменения жесткости основных гибких лент (4, 6).
3. Резонаторный механизм по п. 1 или 2, отличающийся тем, что гибкий элемент (12, 42) содержит по меньшей мере одну вторую гибкую ленту (8, 9, 52, 53), предпочтительно две вторые гибкие ленты, причем каждая вторая гибкая лента (8, 9, 52, 53) соединена с неподвижной опорой (11, 53).
4. Резонаторный механизм по п. 3, отличающийся тем, что средства (15) создания предварительного напряжения содержат валики (14, 16), которые контактируют со вторыми гибкими лентами (8, 9).
5. Резонаторный механизм по п. 3 или 4, отличающийся тем, что средства (15) создания предварительного напряжения выполнены с возможностью приложения переменного усилия или крутящего момента ко вторым гибким лентам (8, 9).
6. Резонаторный механизм по любому из пп. 1–3, отличающийся тем, что средства (15) создания предварительного напряжения выполнены с возможностью приложения переменного усилия или крутящего момента к жесткому участку (7) гибкой направляющей (5).
7. Резонаторный механизм по п. 6, отличающийся тем, что средства (15, 43) создания предварительного напряжения содержат первый подвижный элемент (24, 55, 66) и по меньшей мере одну третью гибкую ленту (25, 54, 67), соединенную с первым подвижным элементом (24, 55, 66) и с жестким участком (7, 47) гибкой направляющей (5, 45) или с гибким элементом (42).
8. Резонаторный механизм по п. 7, отличающийся тем, что средства (15, 43) создания предварительного напряжения содержат множество четвертых гибких лент (26, 56, 68) и второй подвижный элемент (27, 57, 69), причем четвертые гибкие ленты (26, 56) соединяют второй подвижный элемент (27, 37, 57, 69) с первым подвижным элементом (24, 55, 66).
9. Резонаторный механизм по п. 8, отличающийся тем, что средства (15, 43) создания предварительного напряжения содержат по меньшей мере одну пятую гибкую ленту (28, 32, 59, 72), соединяющую второй подвижный элемент (57, 69) или первый подвижный элемент (24, 55) с неподвижной опорой (31, 61, 73).
10. Резонаторный механизм по любому из пп. 1–9, отличающийся тем, что средства (15, 43) создания предварительного напряжения содержат эксцентриковый винт (17), который находится в контакте со вторым подвижным элементом (27) или жестким участком (7).
11. Резонаторный механизм по п. 8 или 9, отличающийся тем, что средства (15, 43) создания предварительного напряжения содержат винт (29, 58, 71), выполненный с возможностью давить в продольном направлении на второй подвижный элемент (27, 37, 57, 69).
12. Резонаторный механизм по п. 8 или 9, отличающийся тем, что средства (15, 43) создания предварительного напряжения содержат рычаг (35) для перемещения второго подвижного элемента (27).
13. Резонаторный механизм по любому из пп. 1–9, отличающийся тем, что средства (15) создания предварительного напряжения содержат первый магнит (17), жестко соединенный с жестким участком (7) или со вторым подвижным элементом, и второй магнит (18), выполненный с возможностью перемещения относительно первого магнита (7).
14. Резонаторный механизм по любому из пп. 1–3, отличающийся тем, что средства (15) создания предварительного напряжения содержат пружину (21), соединенную с жестким участком (7), и подвижный элемент (22) для растягивания или сжатия пружины (21).
15. Резонаторный механизм по любому из пп. 1–14, отличающийся тем, что средства (15, 43) создания предварительного напряжения расположены в той же плоскости, что и гибкая направляющая (5, 45) и гибкий элемент (12).
16. Резонаторный механизм по любому из пп. 1–14, отличающийся тем, что средства (43) создания предварительного напряжения расположены в плоскости, по существу параллельной плоскости гибкой направляющей (45) и гибкого элемента (42).
17. Резонаторный механизм по любому из пп. 1–5, 7–16, отличающийся тем, что гибкий элемент (42) содержит третий подвижный элемент (46) и множество шестых гибких лент (44), соединяющих третий подвижный элемент (46) с жестким участком (47).
18. Резонаторный механизм по п. 6, отличающийся тем, что гибкий элемент (42) содержит третий подвижный элемент (46) и множество шестых гибких лент (44), соединяющих третий подвижный элемент (46) с жестким участком (47).
19. Резонаторный механизм по п. 17, отличающийся тем, что гибкий элемент (42) содержит четвертый подвижный элемент (48) и множество седьмых лент (49), соединяющих третий подвижный элемент (46) с четвертым подвижным элементом (48).
20. Резонаторный механизм по п. 18, отличающийся тем, что гибкий элемент (42) содержит четвертый подвижный элемент (48) и множество седьмых лент (49), соединяющих третий подвижный элемент (46) с четвертым подвижным элементом (48).
21. Резонаторный механизм по п. 20, отличающийся тем, что третья гибкая лента (54, 67) соединена с четвертым подвижным элементом (48).
22. Резонаторный механизм по любому из пп. 1–21, отличающийся тем, что две основные ленты (4, 6) гибкой направляющей (5, 45) перекрещиваются.
23. Резонаторный механизм по любому из пп. 1–22, отличающийся тем, что гибкий элемент (12, 42) имеет жесткость, превышающую жесткость гибкой направляющей (5, 45), предпочтительно по меньшей мере в пять раз, или даже по меньшей мере в десять раз.
24. Часовой механизм, содержащий резонаторный механизм (1, 10, 20, 30, 40, 50, 60, 70, 80, 90, 100, 110, 120, 130, 140) по любому из пп. 1–23.
| EP 3435172 A3, 20.03.2019 | |||
| CN 111344640 A, 26.06.2020 | |||
| US 20200150595 A1, 14.05.2020 | |||
| КАМЕРТОННЫЙ ГЕНЕРАТОР КОЛЕБАНИЙ ДЛЯ ЧАСОВ | 2015 |
|
RU2629167C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ТРУБЫ ДЛЯ МИКРОТОННЕЛИРОВАНИЯ | 2017 |
|
RU2645189C1 |

