Область техники, к которой относится изобретение
Настоящее изобретение относится к гибкой направляющей для поворотного резонаторного механизма. Объектом изобретения является также комплект наложенных друг на друга гибких направляющих для поворотного резонаторного механизма. Объектом изобретения является также часовой механизм, содержащий такую гибкую направляющую или такой комплект наложенных друг на друга гибких направляющих.
Уровень техники
Большинство современных механических наручных или карманных часов содержат систему баланс–спираль и швейцарский рычажный спусковой механизм. Система баланс–спираль образует временную базу наручных или карманных часов. Она также называется резонатором.
Спусковой механизм, в свою очередь, выполняет две главные функции:
- поддержание движения резонатора вперед и назад;
- подсчет этих движений вперед и назад.
Швейцарский рычажный спусковой механизм имеет низкий энергетический КПД (около 30%). Такая низкая энергетическая эффективность обусловлена тем, что движения спускового механизма являются резкими и прерывистыми, при этом спуск и останов необходимо регулировать в зависимости от погрешностей обработки, а также тем, что некоторые компоненты передают свое движение по наклонным плоскостям, которые трутся друг о друга.
Для формирования механического резонатора необходимы инерционный элемент, направляющая и упругий возвратный элемент. Для инерционного элемента, которым является баланс, в качестве упругого возвратного элемента традиционно используется плоская спиральная пружина. Как правило, баланс совершает колебания на цапфах, которые вращаются в гладких рубиновых подшипниках. Это вызывает трение, а следовательно потери энергии и сбои в работе, которые зависят от положения и которые все стремятся устранить.
Существуют также поворотные резонаторы, которые поворачиваются вокруг оси поворота под действием крутящего момента, обеспечивающего непрерывное вращательное движение вокруг оси.
В заявке EP 17194636.1 описан такой резонаторный механизм, содержащий множество инерционных элементов, выполненных с возможностью поворота относительно центральной подвижной детали резонатора и возвращаемых к его оси поворота с помощью упругого возвратного средства. При повороте резонатор располагается в плоскости, перпендикулярной оси поворота резонатора.
В еще одной заявке EP17183211.6 описан поворотный резонатор, содержащий по меньшей мере один инерционный элемент, выполненный с возможностью поворота относительно центральной подвижной детали вокруг второй оси, перпендикулярной оси центральной подвижной детали. При повороте резонатор располагается в плоскости, в которой находится ось поворота резонатора.
В этих заявках, в частности, раскрываются варианты выполнения поворотных резонаторов, в которых в качестве упругого возвратного средства инерционного(ых) элемента(ов) используются гибкие пластинчатые направляющие. Гибкие виртуальные поворотные направляющие позволяют значительно улучшить характеристики резонатора часов. Наиболее простыми являются перекрестно-пластинчатые шарниры, состоящие из двух направляющих устройств с прямыми пластинками, пересекающимися друг с другом, как правило, под прямым углом. Однако существуют также шарниры RCC-типа (с вынесенным центром податливости) с непересекающимися пластинками, у которых центр поворота расположен снаружи конструкции шарнира и которые содержат прямые пластинки, не пересекающиеся друг с другом.
Можно оптимизировать трехмерную пластинчатую направляющую для резонатора, чтобы сделать его изохронным, чтобы его работа не зависела от ориентации в гравитационном поле. Для поворотных резонаторов современного уровня развития техники разработчики стремились получить для гибкой направляющей упругий возвратный момент синусоидальной формы. У некоторых известных поворотных резонаторов возвратный момент, обеспечивающий идеальную изохронность, подчиняется следующему закону:
 , где θ – угол деформации направляющей, а k – жесткость пружины. Таким образом, возвратный момент возрастает до угла деформации направляющей, например, 45°, а затем уменьшается до другого угла, например, 90°.
, где θ – угол деформации направляющей, а k – жесткость пружины. Таким образом, возвратный момент возрастает до угла деформации направляющей, например, 45°, а затем уменьшается до другого угла, например, 90°.
Однако известные поворотные резонаторы с гибкими направляющими не отвечают этому требованию, а следовательно не обеспечивают достаточной изохронности, чтобы быть эффективными.
Раскрытие сущности изобретения
Таким образом, задача настоящего изобретения заключается в создании гибкой направляющей для поворотного резонаторного механизма, в которой были бы устранены вышеупомянутые проблемы.
В связи с этим, настоящим изобретением предлагается гибкая направляющая для поворотного резонаторного механизма, в частности часового механизма, содержащая первую опору, элемент, подвижный относительно первой опоры, первую пару гибких пластинок, соединяющих первую опору с подвижным элементом, так что подвижный элемент может перемещаться относительно первой опоры за счет изгибания пластинок, совершая вращательное движение вокруг центра поворота, причем гибкая направляющая расположена по существу в одной плоскости.
Указанная гибкая направляющая содержит средство предварительного напряжения, выполненное с возможностью приложения усилия для изгибания гибких пластинок путем перемещения первой опоры ближе к подвижному элементу, так что гибкая направляющая имеет два устойчивых положения элемента, подвижного относительно первой опоры, для которых возвратный момент равен нулю, причем между указанными двумя устойчивыми положениями имеется заданный угол поворота.
Настоящее изобретение позволяет получить гибкую пластинчатую направляющую, способную перемещаться между двумя устойчивыми положениями, характеристики которой близки к характеристикам идеальной направляющей для поворотного резонатора. Такая гибкая направляющая гарантирует изохронность и возможность работы независимо от гравитационного поля. Действительно, изгибающее усилие пластинок позволяет преобразовать линейный возвратный момент гибкой направляющей без ограничений в бистабильный возвратный момент, имеющий по существу синусоидальную форму между двумя устойчивыми положениями подвижного элемента.
Согласно предпочтительному варианту осуществления изобретения, возвратный момент гибкой направляющей имеет по существу синусоидальную форму между двумя угловыми положениями.
Согласно предпочтительному варианту осуществления изобретения, подвижный элемент имеет осевую симметрию и центр поворота, при этом гибкие пластинки направлены к центру поворота.
Согласно предпочтительному варианту осуществления изобретения, средство предварительного напряжения содержит пружину, соединяющую подвижный элемент с первой опорой.
Гибкая направляющая в предпочтительном варианте осуществления изобретения содержит вторую опору и вторую пару гибких пластинок, соединяющих вторую опору с подвижным элементом, причем вторая опора и вторая пара гибких пластинок расположены симметрично первой опоре и первой паре гибких пластинок относительно подвижного элемента, причем указанные две пары гибких пластинок соединяют с обеих сторон первую и вторую опоры с подвижным элементом в его центре поворота.
Согласно предпочтительному варианту осуществления изобретения, средство предварительного напряжения содержит удерживающий компонент, содержащий два плеча, каждое из которых прикреплено к опоре, чтобы прикладывать изгибающее усилие на одну опору в направлении другой опоры.
Согласно предпочтительному варианту реализации, удерживающий компонент содержит упругие структуры, расположенные на плечах и контактирующие с каждой опорой.
Согласно предпочтительному варианту реализации, подвижный элемент выполнен частично деформируемым в центре поворота.
Согласно предпочтительному варианту осуществления изобретения, каждое плечо удерживающего компонента содержит деформируемый участок.
Объектом изобретения является также комплект наложенных друг на друга гибких направляющих, содержащий по меньшей мере две гибкие направляющие согласно настоящему изобретению, при этом опоры второй гибкой направляющей прикреплены к подвижному элементу первой гибкой направляющей.
Согласно предпочтительному варианту осуществления изобретения, указанный комплект наложенных друг на друга гибких направляющих содержит третью гибкую направляющую, наложенную на вторую гибкую направляющую, причем опоры третьей гибкой направляющей прикреплены к подвижному элементу второй гибкой направляющей.
Объектом настоящего изобретения является также поворотный резонаторный механизм часового механизма, содержащий центральную подвижную деталь, установленную с возможностью поворота вокруг центральной оси, и два инерционных элемента, установленных с возможностью поворота относительно центральной подвижной детали вокруг второй оси. Указанный поворотный резонаторный механизм содержит две гибкие направляющие, каждая из которых соединяет инерционный элемент с центральной подвижной деталью.
Объектом настоящего изобретения является также поворотный резонаторный механизм часового механизма, содержащий центральную подвижную деталь, установленную с возможностью поворота вокруг центральной оси, и два инерционных элемента, установленных с возможностью поворота относительно центральной подвижной детали вокруг второй оси. Механизм содержит два комплекта наложенных друг на друга гибких направляющих, каждый из которых соединяет инерционный элемент с центральной подвижной деталью.
Краткое описание чертежей
Другие отличительные признаки и преимущества настоящего изобретения станут более ясными после ознакомления с приведенным ниже подробным описанием нескольких возможных вариантов его осуществления, не являющихся ограничивающими и приводимыми исключительно в целях иллюстрации, со ссылками на прилагаемые чертежи.
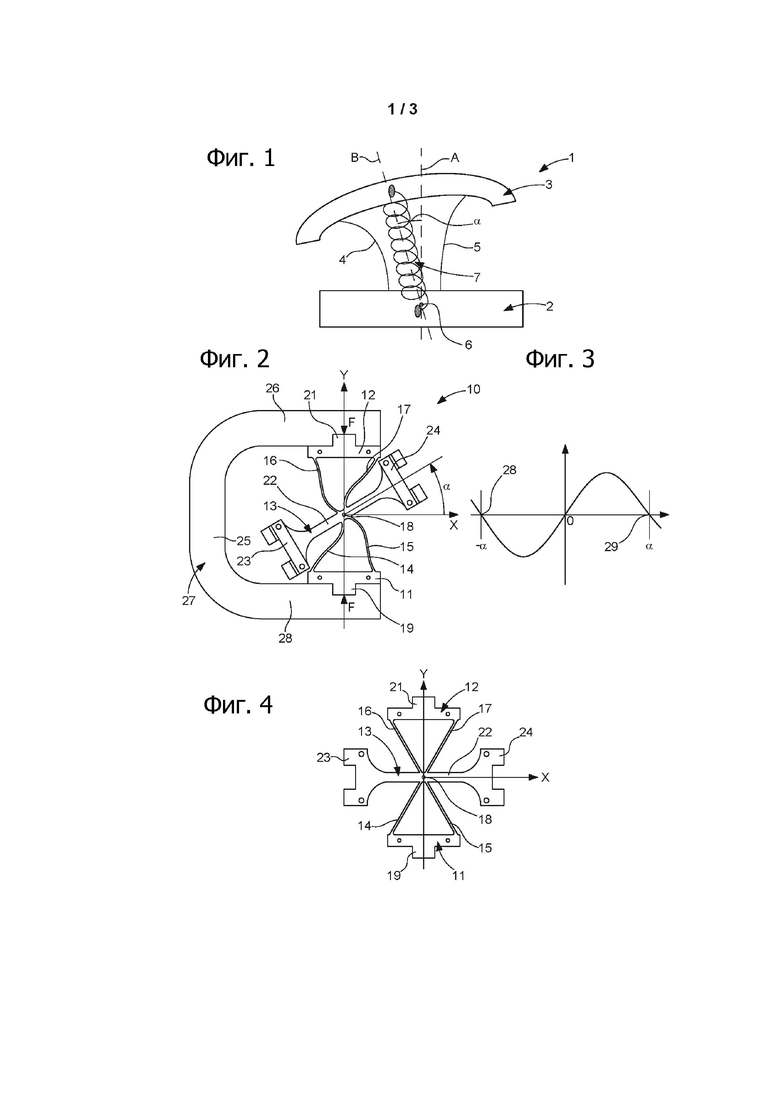
На фиг. 1 схематично показана гибкая направляющая согласно первому варианту осуществления настоящего изобретения, вид сверху;
на фиг. 2 – гибкая направляющая согласно второму варианту осуществления настоящего изобретения;
на фиг. 3 – график зависимости упругого возвратного момента гибкой направляющей от угла поворота;
на фиг. 4 – гибкая направляющая, показанная на фиг. 2, без предварительного напряжения, вид сверху;
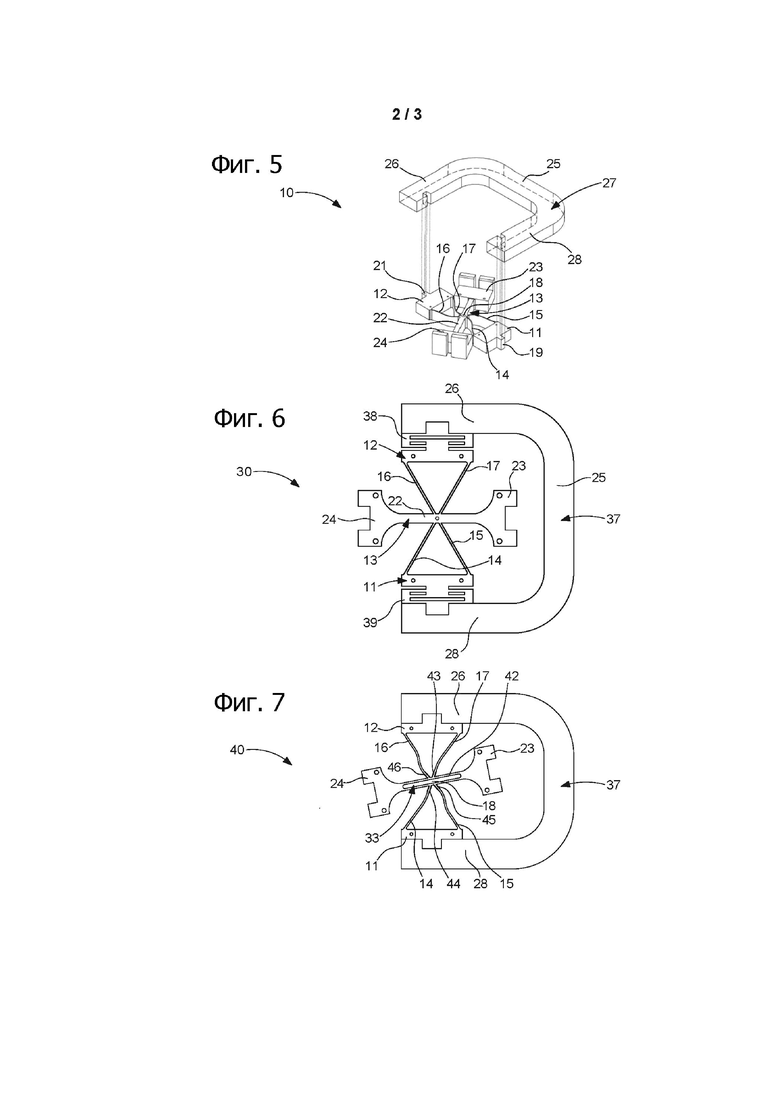
на фиг. 5 – гибкая направляющая согласно первому варианту осуществления изобретения со средством предварительного напряжения, отделенным от остальной части направляющей, вид в перспективе;
на фиг. 6 – гибкая направляющая согласно первой модификации первого варианта осуществления настоящего изобретения, вид сверху;
на фиг. 7 – гибкая направляющая согласно второй модификации первого варианта осуществления настоящего изобретения, вид сверху;
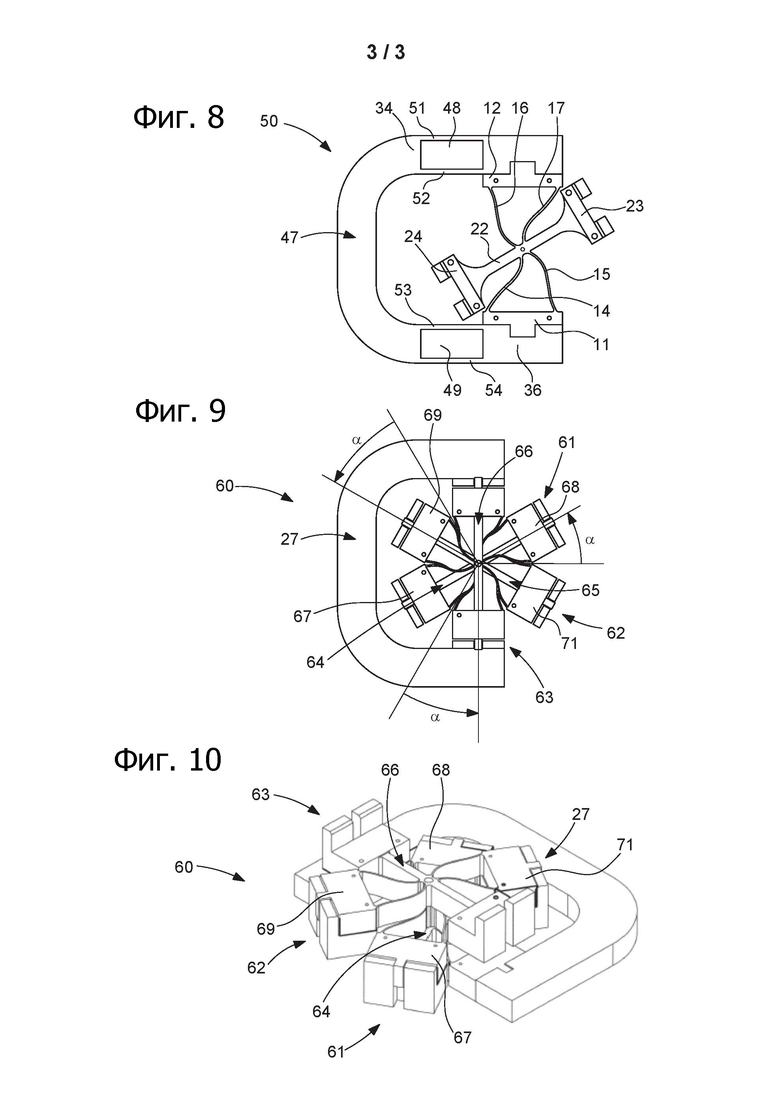
на фиг. 8 – гибкая направляющая согласно третьей модификации первого варианта осуществления настоящего изобретения, вид сверху;
на фиг. 9 – комплект гибких направляющих согласно одному из возможных вариантов осуществления изобретения, вид сверху;
на фиг. 10 – комплект гибких направляющих, показанный на фиг. 9, вид в перспективе.
Осуществление изобретения
На фиг. 1 показана гибкая направляющая 1, содержащая опору 2, элемент 3, подвижный относительно опоры 2, и две непересекающиеся гибкие пластинки 4, 5, соединяющие подвижный элемент 3 с опорой 2. Подвижный элемент 3 имеет дугообразную форму, пластинки 4, 5 расположены с внутренней стороны дуги. Пластинки 4, 5 имеют одинаковую длину и симметрично соединены с опорой 2. Без предварительного напряжения пластинки 4, 5 ориентированы в двух направлениях, которые пересекаются друг с другом в точке 6 опоры 2, являющейся центром поворота подвижного элемента 3. Подвижный элемент 3 может перемещаться относительно опоры 2 за счет изгиба гибких пластинок 4, 5. Гибкая направляющая 1 расположена по существу в одной плоскости.
Согласно настоящему изобретению, гибкая направляющая 1 содержит средство 7 предварительного напряжения, выполненное с возможностью приложения усилия с целью изгиба гибких пластинок 4, 5 путем смещения подвижного элемента 3 ближе к опоре 2. Используемое для этого средство 7 предварительного напряжения представляет собой, например, пружину, прикрепленную с одной стороны к опоре 2, а с другой стороны – к подвижному элементу 3. Предпочтительно, пружина закреплена по существу в центре масс подвижного элемента 3.
Пружина создает тянущее усилие, которое заставляет подвижный элемент 3 переместиться ближе к опоре 2. Таким образом, изгибающее усилие заставляет пластинки изгибаться, чтобы возвратить подвижный элемент 3 в устойчивое положение, для которого возвратный момент равен нулю. Показанный на фиг. 1 подвижный элемент смещен в устойчивое положение влево. Без предварительного напряжения подвижный элемент 3 центрирован на оси A, в то время как в устойчивом положении с предварительным напряжением подвижный элемент 3 центрирован на оси B. Ось B расположена под углом α к оси A.
Существует и второе устойчивое положение, не показанное на фиг. 1, в котором подвижный элемент 3 может быть расположен относительно опоры и для которого возвратный момент равен нулю. Второе положение симметрично первому относительно оси A, причем в этом положении подвижный элемент смещен вправо, образуя с осью A угол -α. Таким образом, угол между двумя устойчивыми положениями составляет 2α. Кроме того, возвратный момент гибкой направляющей 1 имеет по существу синусоидальную форму. Благодаря средству 7 предварительного напряжения подвижный элемент 3 может переходить из одного устойчивого положения в другое устойчивое положение, в зависимости от действующего на него усилия.
Применительно к поворотным резонаторным механизмам, таким как описанные в заявках, указанных в вводной части описания, используются две гибкие направляющие вместо описанных в данных заявках. Опоры прикреплены к центральному элементу, а каждый из подвижных элементов прикреплен к инерционному элементу.
На фиг. 2 и 5 представлен второй вариант выполнения гибкой направляющей 10 согласно настоящему изобретению. Для лучшего понимания на фиг. 4 показана та же самая гибкая направляющая 10 без средства предварительного напряжения. Гибкая направляющая 10 содержит первую опору 11 и вторую опору 12, элемент 13, подвижно установленный относительно опор 11, 12, две пары непересекающихся гибких пластинок 14, 15, 16, 17, позволяющих подвижному элементу 13 двигаться относительно опор 11, 12. Гибкая направляющая 10 расположена по существу в одной плоскости. Каждая пара пластинок 14, 15, 16, 17 соединяет одну из опор 11, 12 с подвижным элементом 13. Пары пластинок 14, 15, 16, 17 соединены с подвижным элементом в центре 18 поворота подвижного элемента 13. Опоры 11, 12 имеют форму параллелепипеда с задним выступом 19, 21. Пластинки 14, 15, 16, 17 отходят от двух противоположных концов опоры 11, 12 к середине подвижного элемента 13. Гибкая направляющая 10 расположена по существу в одной плоскости.
Подвижный элемент 13 содержит продольную часть 22 и U-образную часть 23, 24 на каждом конце продольной части 22. Каждый конец продольной части соединен с центром U-образной части 23, 24. Таким образом, подвижный элемент 13 имеет ось симметрии, проходящую вдоль его продольной части 22. В середине продольной части расположен центр 18 поворота подвижного элемента 13.
Без средства предварительного напряжения, как показано на фиг. 4, пары пластинок 14, 15, 16, 17 и опоры 11, 12 образуют равнобедренные треугольники, главная вершина которых расположена в центре подвижного элемента 13. Гибкая направляющая 10 имеет две взаимно перпендикулярные оси X, Y симметрии. Первая ось X проходит в продольном направлении вдоль оси продольной части 22, а вторая ось Y проходит через опоры 11, 12, разделяя их на две равные части. Эти две оси X, Y проходят также через центр 18 поворота гибкой направляющей 10. Таким образом, две пластинки 14, 15, 16, 17 одной и той же пары симметрично расположены относительно второй оси Y. Две U-образные части также симметрично расположены относительно второй оси Y симметрии. Две опоры 11, 12 симметрично расположены относительно первой оси X симметрии.
Подвижный элемент 13 выполнен с возможностью поворота вокруг центра 18 поворота благодаря гибкости пластинок 14, 15, 16, 17. Центр 18 поворота расположен по существу в центре масс. Подвижный элемент 13 поворачивается в плоскости гибкой направляющей 10 в зависимости от воздействия на направляющую 10. Без предварительного напряжения упругий возвратный момент линейно зависит от угла поворота относительно положения равновесия механизма. Кроме того, в этом случае существует только одно устойчивое положение, соответствующее исходному положению подвижного элемента. Как показано на фиг. 4, подвижный элемент проходит вдоль первой оси X симметрии.
Согласно настоящему изобретению, гибкая направляющая 10 содержит средство 27 предварительного напряжения, выполненное с возможностью приложения усилия F с целью изгиба гибких пластинок 14, 15, 16, 17 путем смещения каждой опоры 11, 12 ближе к подвижному элементу 13. Для этого гибкая направляющая 10 снабжена компонентом для удержания указанных опор 11, 12, причем данный удерживающий компонент образует указанное средство 27 предварительного напряжения. Удерживающий компонент содержит U-образную деталь 25, оба плеча 26, 28 которой по существу параллельны друг другу, причем каждое плечо соединено с одной из опор 11, 12. Расстояние между двумя плечами меньше, чем расстояние между двумя опорами 11, 12 без предварительного напряжения. Таким образом, плечи 26, 28 давят на опоры 11, 12, оказывая на них усилие F, в результате чего гибкие пластинки 14, 15, 16, 17 деформируются, смещая каждую опору 11, 12 ближе к подвижному элементу 13. Изгибающее усилие F направлено вдоль второй оси Y симметрии гибкой направляющей 10. Таким образом, гибкие пластинки 14, 15, 16, 17 двух пар гибких пластинок по существу изогнуты. В результате этого подвижный элемент 13 смещается, поворачиваясь на заданный угол α и занимая первое устойчивое положение. Угол α определяется относительно первой оси X симметрии, причем в первом устойчивом положении в направлении вверх, как показано на фиг. 2. Кроме того, гибкая направляющая 10 имеет второе устойчивое угловое положение, не показанное на чертежах, в котором подвижный элемент 13 повернут на угол –α вниз. Эти два устойчивых угловых положения определены относительно первой оси X симметрии, при этом угол между ними составляет 2α. Второе устойчивое положение симметрично первому устойчивому положению относительно первой оси X симметрии гибкой направляющей 10. Значения углов устойчивых положений зависят от усилия, создаваемого средством предварительного напряжения.
На фиг. 3 приведен график зависимости возвратного момента гибкой направляющей 10 от угла поворота подвижного элемента 13. Без средства предварительного напряжения гибкая направляющая, показанная на фиг. 4, будет представлять собой прямую линию, проходящую через 0. Благодаря средству 27 предварительного напряжения график возвратного момента имеет по существу синусоидальную форму в течение одного периода между двумя устойчивыми положениями. Два устойчивых положения 28, 29 соответствуют нулевому возвратному моменту и расположены под углом ±α. Таким образом, упругий возвратный момент гибкой направляющей 10 изменен так, что возвратный момент имеет два устойчивых положения и по существу синусоидальную форму.
Подвижный элемент 13 может переходить из одного устойчивого положения в другое в зависимости от движения, совершаемого гибкой направляющей 10, в частности, в поворотном резонаторном механизме, в котором гибкая направляющая 10 поворачивается вокруг главной оси механизма. Положение подвижного элемента 13 зависит от действующей на него центробежной силы. Благодаря такой гибкой направляющей 10 скорость поворота резонатора остается по существу постоянной, даже если движущая сила, действующая на резонаторный механизм, изменяется.
На фиг. 6, 7 и 8 представлены модификации описанного выше второго варианта осуществления изобретения, и показано большинство их отличительных признаков.
В первой модификации второго варианта выполнения гибкой направляющей 30, показанной на фиг. 6, удерживающий компонент содержит амортизаторы 38, 39, выполненные из упругого материала. Амортизаторы 38, 39 закреплены на плечах 26, 28 удерживающего компонента. Они могут иметь, например, форму буквы "U", на стенках которой расположены язычки, направленные внутрь буквы "U". В рабочем положении язычки расположены с обеих сторон заднего выступа, упираясь в заднюю поверхность опоры 11, 12. Таким образом, язычки могут деформироваться, когда гибкие пластинки 14, 15, 16, 17 толкают опору 11, 12, например, когда подвижный элемент 13 изменяет свое устойчивое положение.
Амортизаторы 38, 39 расположены на концах стенок, чтобы быть в контакте с опорами 11, 12 гибкой направляющей 30. Таким образом, эти амортизаторы 38, 39 позволяют улучшить кривизну графика упругого возвратного момента на участках между устойчивыми положениями, чтобы придать им форму, еще более близкую к синусоиде.
Показанная на фиг. 7 вторая модификации данного варианта осуществления изобретения заключается в том, что продольная часть 42 подвижного элемента 33 является частично гибкой. В продольной части 42 выполнено продольное сквозное отверстие, ограниченное двумя стенками. Под действием перемещения подвижного элемента из одного устойчивого положения в другое указанные стенки изгибаются. Аналогично первой модификации данного варианта, график упругого возвратного момента этой направляющей имеет форму, более близкую к синусоиде. На внешней стороне вышеуказанные стенки продольной части 42 содержат трубки 43, 44, 45, 46, предназначенные для вставки в них гибких пластинок 14, 15, 16, 17.
В третьей модификации данного варианта осуществления изобретения, показанной на фиг. 8, удерживающий компонент снабжен гибкими участками 48, 49, расположенными перед концом каждого плеча 34, 36. Эти участки 48, 49 обеспечивают гибкость плечам 34, 36, когда подвижный элемент меняет свое устойчивое положение. Каждый гибкий участок 48, 49 содержит две гибкие стенки 51, 52, 53, 54, разделенные сквозным отверстием, так что при перемещении подвижного элемента 13 и изгибе пластинок 14, 15, 16, 17, которые оказывают давление на удерживающий компонент, указанные стенки деформируются. Аналогично двум вышеописанным модификациям данного варианта, график упругого возвратного момента этой направляющей имеет форму, более близкую к синусоиде.
Объектом настоящего изобретения является также комплект 60 наложенных друг на друга гибких направляющих. Показанный на фиг. 9 и 10 комплект 60 содержит три гибкие направляющие 61, 62, 63, аналогичные описанной во втором варианте осуществления изобретения с тем отличием, что только первая гибкая направляющая 61 содержит удерживающий компонент 27 согласно второму варианту осуществления изобретения. Две другие гибкие направляющие 62, 63 имеют отличные средства предварительного напряжения. Две опоры 67, 68 второй гибкой направляющей 62 прикреплены к подвижному элементу 64 первой гибкой направляющей 61. Опоры 69, 71 третьей гибкой направляющей 63 прикреплены к подвижному элементу 65 второй гибкой направляющей 62. Для этого задний выступ каждой опоры вставлен в U-образную часть подвижного элемента нижней направляющей.
Для ограничения перемещения верхней гибкой направляющей 62, 63 расстояние между двумя U-образными частями подвижного элемента 64, 65 нижнего подвижного элемента выполнено меньшим, чем расстояние между двумя опорами 67, 68, 69, 71 верхней направляющей 62, 63 без предварительного напряжения. Таким образом, опоры 67, 68, 69, 71 верхней гибкой направляющей 62, 63 поддерживаются сжатыми между двумя U-образными частями подвижного элемента 64, 65 нижней направляющей 61, 62. За счет такого сцепления опор 67, 68, 69, 71 обеспечивается изгибающее усилие гибких пластинок.
Для каждой гибкой направляющей 61, 62, 63 угол смещения между двумя устойчивыми положениями равен 2α, где α – угол, образованный положением подвижного элемента с предварительным напряжением, относительно положения подвижного элемента без предварительного напряжения. Угол α может составлять, например, от 20 до 40°, предпочтительно может быть по существу равен 30°. Таким образом, при взаимном наложении друг на друга трех устройств получается общий угол 90°. Получающаяся гибкая направляющая с таким общим углом является идеальной для применения в резонаторе часового механизма.
В состоянии покоя верхняя гибкая направляющая ориентирована в направлении, образующем угол, соответствующий углу между двумя устойчивыми положениями подвижного элемента. Таким образом, вторая ось симметрии верхней гибкой направляющей образует со второй осью симметрии верхней гибкой направляющей угол, равный, например, 30°.
Объектом настоящего изобретения является также поворотный резонаторный часовой механизм, не показанный на прилагаемых чертежах.
В первом исполнении резонаторный механизм снабжен гибкой направляющей согласно первому или второму вариантам осуществления изобретения.
Во втором исполнении резонаторный механизм снабжен комплектом наложенных друг на друга гибких направляющих согласно настоящему изобретению.
Гибкая направляющая или комплект наложенных друг на друга гибких направляющих выполняет функцию, позволяющую подвижным грузикам резонаторного механизма удаляться от центра поворота при большем вращательном усилии механизма или приближаться к нему при меньшем вращательном усилии механизма. Таким образом, обеспечивается по существу постоянная скорость поворота независимо от напряжения пружины барабана.
В примерах поворотных резонаторных механизмов заявок, указанных в вводной части описания, описанные в них гибкие направляющие заменены гибкой направляющей согласно настоящему изобретению или комплектом наложенных друг на друга гибких направляющих согласно настоящему изобретению. С этой целью удерживающий компонент нижней направляющей прикреплен к оси, а опора верхней направляющей прикреплена к подвижному грузику резонатора. Благодаря симметрии, второй узел собирается аналогичным образом, чтобы обеспечить возможность движения другого подвижного грузика резонатора относительно центра поворота резонатора.
Разумеется, настоящее изобретение не ограничивается вариантами осуществления, раскрытыми в настоящем описании со ссылками на прилагаемые чертежи, и возможны также другие варианты осуществления без выхода за пределы объема изобретения.
Использование: настоящее изобретение относится к гибкой направляющей для поворотного резонаторного механизма. Сущность: гибкая направляющая (1, 10, 30, 40, 50) для поворотного резонаторного механизма, в частности часового механизма, содержит первую опору (2, 11), элемент (3, 13), подвижный относительно первой опоры (2, 11), первую пару гибких пластинок (14, 15), соединяющих первую опору (2, 11) с подвижным элементом (3, 13), так что подвижный элемент (3, 13) может перемещаться относительно первой опоры (2, 11) за счет изгибания пластинок (14, 15), совершая вращательное движение вокруг центра (6, 18) поворота, причем гибкая направляющая (1, 10, 30, 40, 50) расположена по существу в одной плоскости, при этом указанная гибкая направляющая содержит средство (7, 27, 37, 47) предварительного напряжения, выполненное с возможностью приложения усилия для изгибания гибких пластинок (14, 15) путем перемещения первой опоры (2, 11) ближе к подвижному элементу (3, 13), так что гибкая направляющая (1, 10, 30, 40, 50) имеет два устойчивых положения (28, 29) элемента (3, 13), подвижного относительно первой опоры, для которых возвратный момент равен нулю, причем между указанными двумя устойчивыми положениями (28, 29) имеется заданный угол (2α) поворота. Технический результат: повышение эффективности за счет повышения изохронности, чтобы работа резонаторного механизма не зависела от ориентации в гравитационном поле. 4 н. и 9 з.п. ф-лы, 10 ил.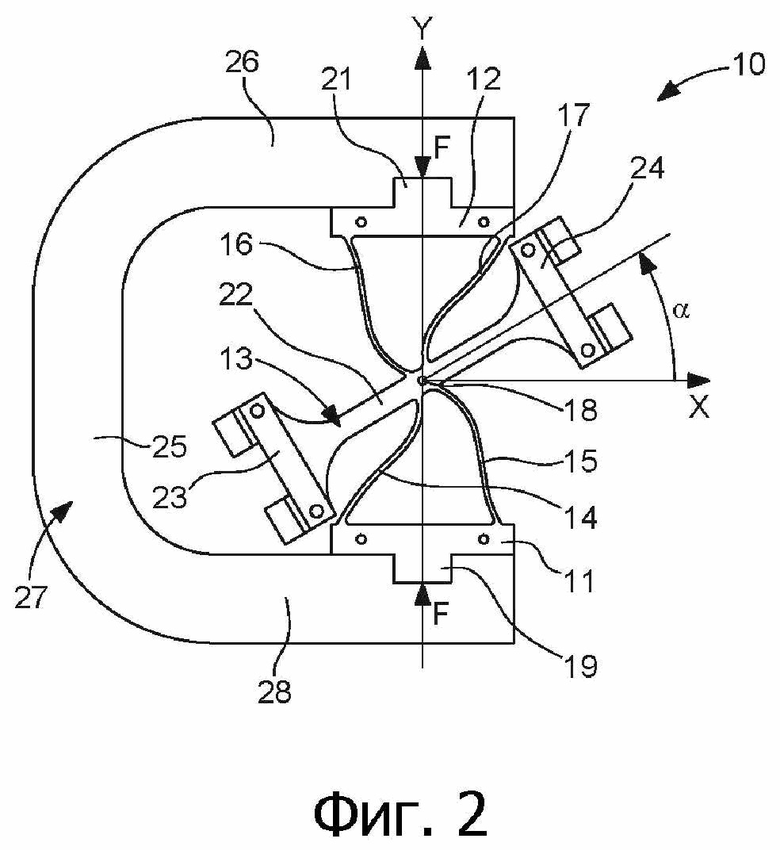
1. Гибкая направляющая для поворотного резонаторного механизма, в частности часового механизма, при этом указанная направляющая (1, 10, 30, 40, 50) содержит первую опору (2, 11), элемент (3, 13), подвижный относительно первой опоры (2, 11), первую пару гибких пластинок (14, 15), соединяющих первую опору (2, 11) с подвижным элементом (3, 13), так что подвижный элемент (3, 13) выполнен с возможностью перемещения относительно первой опоры (2, 11) за счет изгибания пластинок (14, 15), совершая вращательное движение вокруг центра (6, 18) поворота, причем гибкая направляющая (1, 10, 30, 40, 50) расположена по существу в одной плоскости, отличающаяся тем, что она содержит средство (7, 27, 37, 47) предварительного напряжения, причем средство (7, 27, 37, 47) предварительного напряжения выполнено с возможностью приложения усилия для изгиба гибких пластинок (14, 15) путем перемещения первой опоры (2, 11) ближе к подвижному элементу (3, 13), так что гибкая направляющая (1, 10, 30, 40, 50) имеет два устойчивых положения (28, 29) элемента (3, 13), подвижного относительно первой опоры (2, 11), для которых возвратный момент равен нулю, причем между указанными двумя устойчивыми положениями (28, 29) имеется заданный угол (2α) поворота.
2. Гибкая направляющая по п. 1, отличающаяся тем, что возвратный момент гибкой направляющей (1, 10, 30, 40, 50) имеет по существу синусоидальную форму между двумя указанными устойчивыми угловыми положениями (28, 29).
3. Гибкая направляющая по п. 1 или 2, отличающаяся тем, что подвижный элемент (3, 13) имеет осевую симметрию и центр (6, 18) поворота, при этом гибкие пластинки (14, 15) направлены к центру (18) поворота.
4. Гибкая направляющая по п. 3, отличающаяся тем, что средство (7) предварительного напряжения содержит пружину, соединяющую подвижный элемент (3) с первой опорой (2).
5. Гибкая направляющая по любому из пп. 1–3, отличающаяся тем, что она содержит вторую опору (12) и вторую пару гибких пластинок (16, 17), соединяющих вторую опору (12) с подвижным элементом (13), причем вторая опора (12) и вторая пара пластинок (16, 17) расположены симметрично первой опоре (11) и первой паре гибких пластинок (14, 15) относительно подвижного элемента (13), при этом указанные две пары гибких пластинок (14, 15, 16, 17) соединяют с обеих сторон первую и вторую опоры (11, 12) с подвижным элементом (13) в его центре (18) поворота.
6. Гибкая направляющая по п. 5, отличающаяся тем, что средство (27, 37) предварительного напряжения содержит удерживающий компонент, содержащий два плеча (26, 28, 34, 36), каждое из которых прикреплено к опоре (11, 12), чтобы прикладывать изгибающее усилие на одну опору (11, 12) в направлении другой опоры (11, 12).
7. Гибкая направляющая по п. 5 или 6, отличающаяся тем, что удерживающий компонент содержит упругие части (38, 39), расположенные на плечах (26, 28) и контактирующие с каждой опорой (11, 12).
8. Гибкая направляющая по п. 5 или 6, отличающаяся тем, что подвижный элемент (33) является частично гибким в центре (18) поворота.
9. Гибкая направляющая по п. 5 или 6, отличающаяся тем, что каждое плечо (34, 36) удерживающего компонента содержит деформируемый участок (48, 49).
10. Комплект наложенных друг на друга гибких направляющих, характеризующийся тем, что он содержит по меньшей мере две гибкие направляющие (61, 62) по любому из пп. 5–9, при этом опоры (67, 68) второй гибкой направляющей (62) прикреплены к подвижному элементу (64) первой гибкой направляющей (61).
11. Комплект по п. 10, характеризующийся тем, что он содержит третью гибкую направляющую (63), наложенную на вторую гибкую направляющую (62), причем опоры (69, 71) третьей гибкой направляющей (63) прикреплены к подвижному элементу (65) второй гибкой направляющей (62).
12. Поворотный резонаторный механизм, в частности для часового механизма, содержащий центральную подвижную деталь, установленную с возможностью поворота вокруг центральной оси, и два инерционных элемента, установленных с возможностью поворота относительно центральной подвижной детали вокруг второй оси, отличающийся тем, что он содержит две гибкие направляющие (1, 10, 30, 40, 50) по любому из пп. 1–9, причем каждая гибкая направляющая (1, 10, 30, 40, 50) соединяет инерционный элемент с центральной подвижной деталью.
13. Поворотный резонаторный механизм, в частности для часового механизма, содержащий центральную подвижную деталь, установленную с возможностью поворота вокруг центральной оси, и два инерционных элемента, установленных с возможностью поворота относительно центральной подвижной детали вокруг второй оси, отличающийся тем, что он содержит два комплекта (60) наложенных друг на друга гибких направляющих по п. 10 или 11, причем каждый комплект (60) соединяет инерционный элемент с центральной подвижной деталью.
| RU 2017135092 A, 05.04.2019 | |||
| RU 2017134933 A, 05.04.2019 | |||
| АНКЕРНОЕ УСТРОЙСТВО ДЛЯ ЧАСОВОГО СПУСКА | 2013 |
|
RU2603954C1 |
| EP 3316047 A1, 02.05.2018 | |||
| US 20170123380 A1, 04.05.2017. | |||

