Область техники, к которой относится изобретение
Объектом настоящего изобретения является резонаторный механизм для часового механизма, содержащий входной подвижный элемент, установленный с возможностью поворота относительно оси поворота и подверженный воздействию приводного крутящего момента, и центральный подвижный элемент, соединенный с указанным входным подвижным элементом с возможностью поворота относительно указанной оси поворота и непрерывно поворачивающийся, причем указанный резонаторный механизм содержит множество инерционных элементов, состоящее из N инерционных элементов, каждый из которых может перемещаться по меньшей мере с одной степенью свободы относительно указанного центрального подвижного элемента и возвращаться к указанной оси поворота упругими возвратными средствами, оказывающими возвращающее усилие на центр масс указанного инерционного элемента, причем указанный резонаторный механизм обладает вращательной симметрией порядка N.
Изобретение относится также к часовому механизму, содержащему по меньшей мере один такой резонаторный механизм.
Изобретение относится также к часам, в частности наручным или карманным часам, содержащим такой часовой механизм.
Изобретение относится также к области производства резонаторных механизмов, образующих базу часового механизма.
Уровень техники
Большинство современных механических наручных или карманных часов оснащены пружинным балансом и швейцарским анкерным спусковым механизмом. Пружинный баланс образует временную базу часов. Он также называется резонатором.
Сам спусковой механизм выполняет две основные функции:
- поддержание возвратно-поступательных движений резонатора;
- подсчет этих возвратно-поступательных движений.
Помимо выполнения этих двух основных функций, спусковой механизм должен быть надежным, ударостойким и должен предотвращать заклинивание движения (перебрасывание вилки).
Швейцарский анкерный спусковой механизм имеет низкий энергетический КПД (около 30%). Такая низкая энергетическая эффективность обусловлена тем, что движения спускового механизма являются прерывистыми, спуск и останов необходимо регулировать в зависимости от погрешностей обработки, а также тем, что некоторые компоненты передают свое движение по наклонным плоскостям, пересекающимся друг с другом.
Для формирования механического резонатора необходимы инерционный элемент, направляющее средство и упругий возвратный элемент. Традиционно, в качестве упругого возвратного элемента для входящего в состав баланса инерционного элемента используется спиральная плоская пружина. Этот баланс направляется опорами, которые могут поворачиваться в гладких опорных подушках из рубина. Это вызывает трение, и, следовательно, потери энергии и сбои в работе, которые зависят от положения, и которые все стремятся устранить. Потери характеризуются коэффициентом качества Q. Задача заключается в том, чтобы максимально повысить этот коэффициент Q.
В патентной заявке EP2847547 на имя Montres BREGUET описан механизм регулирования скорости вращения относительно первой оси вращения подвижного элемента, в частности ударного механизма, инерционный блок которого поворачивается относительно второй оси поворота, параллельной первой оси. Данный регулятор содержит средство для восстановления положения инерционного блока и перемещения его к первой оси. Когда подвижный элемент поворачивается со скоростью ниже заданной, инерционный блок остается заключенным в первой области вращения относительно первой оси. Когда данный подвижный элемент поворачивается со скоростью выше заданной, инерционный блок вступает во вторую область вращения относительно первой оси, расположенную рядом и за пределами первой области вращения, и периферийная часть инерционного блока взаимодействует с этой второй областью вращения с помощью регулировочного средства, которое вызывает торможение подвижного элемента и снижает его скорость вращения обратно до заданной, а также обеспечивает рассеяние избыточной энергии. В частности, подвижный элемент подвергается воздействию тормозного момента с помощью токов Фуко.
В патентной заявке EP14184155 на имя ETA Manufacture Horlogère Suisse раскрывается часовой регулировочный механизм, содержащий следующие элементы, подвижно установленные по меньшей мере с возможностью качания относительно платины: спусковое колесо, на которое действует приводной крутящий момент через подвижный элемент, и первый осциллятор, содержащий первую жесткую структуру, соединенную с платиной первым упругим возвратным средством. Этот регулировочный механизм содержит также второй осциллятор, содержащий вторую жесткую структуру, соединенную с первой жесткой структурой вторым упругим возвратным средством, и содержащую гибкое направляющее средство, взаимодействующее с дополнительным направляющим средством, входящим в состав спускового колеса, которое синхронизирует первый осциллятор и второй осциллятор через подвижный элемент.
В патентной заявке EP15153657 на имя ETA Manufacture Horlogère Suisse раскрыт часовой осциллятор, имеющий конструкцию и отдельные первичные резонаторы, временно и геометрически не совпадающие по фазе, каждый из которых имеет массу, возвращаемую в сторону структуры упругим возвратным средством. Этот часовой осциллятор содержит соединительное средство для обеспечения взаимодействия первичных резонаторов, которые имеют приводные средства, служащие для приведения в действие подвижного элемента, содержащего приводные и направляющие средства, служащие для привода и направления управляющего средства, соединенного со средством передачи, каждое из которых расположено на расстоянии от средства управления с массой первичного резонатора, причем первичные резонаторы и подвижный элемент устроены таким образом, что шарнирные оси любых двух из первичных резонаторов и шарнирная ось управляющего средства никогда не находятся в одной плоскости.
В патентной заявке PCT/EP2015/065434 на имя The Swatch Group Research & Development Ltd. раскрыт часовой узел, включающий в себя комбинированный резонатор с улучшенной изохронностью по меньшей мере до двух степеней свободы, который содержит первый линейный или поворотный осциллятор с уменьшенной амплитудой в первом направлении, относительно которого совершает колебания второй линейный или поворотный осциллятор с уменьшенной амплитудой во втором направлении, практически перпендикулярном направлению колебаний первого осциллятора, и данный второй осциллятор образует вторую опорную массу скользящего блока. Данный часовой узел содержит подвижный элемент, служащий для приложения крутящего момента резонатора, причем данный подвижный элемент содержит паз, в котором скользит указанный скользящий блок с минимальным зазором. Этот скользящий блок устроен таким образом, что он либо свободно скользит по пазу, следуя кривой профиля паза, если она имеется, или скользит по пазу с трением, или отталкивает обратно внутренние боковые поверхности паза с помощью своих намагничиваемых или электризуемых поверхностей.
В патентном документе FR630831A на имя Schieferstein раскрыт способ и устройство для передачи мощности между механическими системами или для управления механическими системами, в которых два колебательных движения гибких механизмов, образующих соответствующий угол друг с другом, действуют друг на друга, создавая вибрацию, направленную вдоль замкнутой кривой, и которая с целью передачи усилия или управления гибко связана с вращательным движением. Возвратное средство прикреплено к платине. Соединительные элементы между массами упругие, и, следовательно, не являются кинематическими связями.
В документе EP3095011A2 и документе WO2015/104962 на имя EPFL TTO раскрыт механический изотропный гармонический осциллятор, содержащий по меньшей мере одну связь с двумя степенями свободы, удерживающую орбитальную массу, зафиксированной относительно базы пружинами, обладающими изотропными и линейными возвратными свойствами. Более конкретно, плоская пружинная платформа образует связь с двумя степенями свободы, которая создает чисто поступательное движение орбитальной массы, так что данная масса смещается в направлении вдоль своей орбиты, сохраняя при этом фиксированную ориентацию. В одном из вариантов каждая пружинная платформа содержит по меньшей мере две параллельные пружины. Пружины или иное соответствующее возвратное средство здесь тоже прикреплены к платине.
Когда масса, приводимая во вращение относительно фиксированной оси и соединенная с этой осью радиальной линейной возвратной пружиной, поворачивается подвижным элементом с пазом, если штифт, перемещающийся в данном пазе, прикреплен к массе и если эта масса имеет точкообразную форму, её траектории представляют собой эллипсы или окружности, и все являются изохронными. Если данная масса обладает инерцией вращения, то изохронными являются только круговые траектории. При особых условиях, которые являются довольно трудными для тонкой настройки, возможна стабилизация траекторий по окружности, и резонатор тогда будет оставаться изохронным в зависимости от приводного крутящего момента зубчатого колеса.
Раскрытие сущности изобретения
Настоящее изобретение направлено на решение двух проблем, а именно:
- устранение помех вследствие трения опор резонатора для повышения его коэффициента качества;
- устранение биения спускового механизма для повышения его эффективности, в частности эффективности функции удерживания и счета, которые, как правило, выполняет спусковой механизм.
Для устранения этих проблем настоящим изобретением предлагается поворотный резонаторный механизм по п. 1.
Исторически сложилось, что часовых дел мастера не рассматривали поворотный резонатор в качестве временной базы для наручных или карманных часов, поскольку они в целом не изохронны и чувствительны к воздействию гравитации.
Рассматриваемый поворотный резонаторный механизм согласно настоящему изобретению содержит, в частности, направляющее устройство, трение направления которого не рассеивает энергию в стационарном режиме, повышая, таким образом, коэффициент качества.
Кроме того, в рассматриваемом конкретном поворотном резонаторном механизме поддержание вращения осуществляется крутящим моментом, прикладываемым непосредственно к валу резонатора, что позволяет избежать динамических потерь, характерных для классического спускового механизма.
Для получения поворотного резонаторного механизма, который можно было бы использовать в качестве временной базы для хронометражного инструмента, настоящее изобретение предполагает выполнение следующих основных условий:
- условие изохронности: поворотный резонаторный механизм имеет множество подвижных инерционных элементов, каждый из которых приводится обратно к главной оси поворота упругим возвратным средством, упругое возвращающее действие которого прикладывает к центру масс данного инерционного элемента центральную силу, величина которой пропорциональна расстоянию между осью поворота и данным центром масс;
- условие нечувствительности к положению: использование множества подвижных инерционных элементов, каждый из который направляется таким образом, чтобы иметь возможность перемещаться в сторону от оси поворота, в сочетании с:
- либо повышенной частотой, т.е. частотой выше 20 Гц, в случае применения для наручных или карманных часов;
- либо соединительным механизмом, заставляющим общий центр масс (центр масс всех этих инерционных элементов) оставаться на оси поворота независимо от амплитуды, т.е. кинематической связью, заставляющей центры масс различных инерционных элементов в любой момент времени оставаться на одном и том же радиусе относительно оси поворота;
- условие нечувствительности к ударным нагрузкам и помехам: радиальное трение обеспечивает возвращение центров масс инерционных элементов на круговую траекторию после отклонения от траектории. Такое радиальное трение может быть реализовано воздушным трением, трением опоры, подвижного элемента и т.п.
Изобретение относится также к часовому механизму, содержащему по меньшей мере один такой резонаторный механизм.
Изобретение относится также к часам, в частности наручным или карманным часам, содержащим один такой часовой механизм.
Краткое описание чертежей
Другие характеристики и преимущества данного изобретения станут более ясными после ознакомления с приведенным ниже его подробным описанием со ссылками на прилагаемые чертежи.
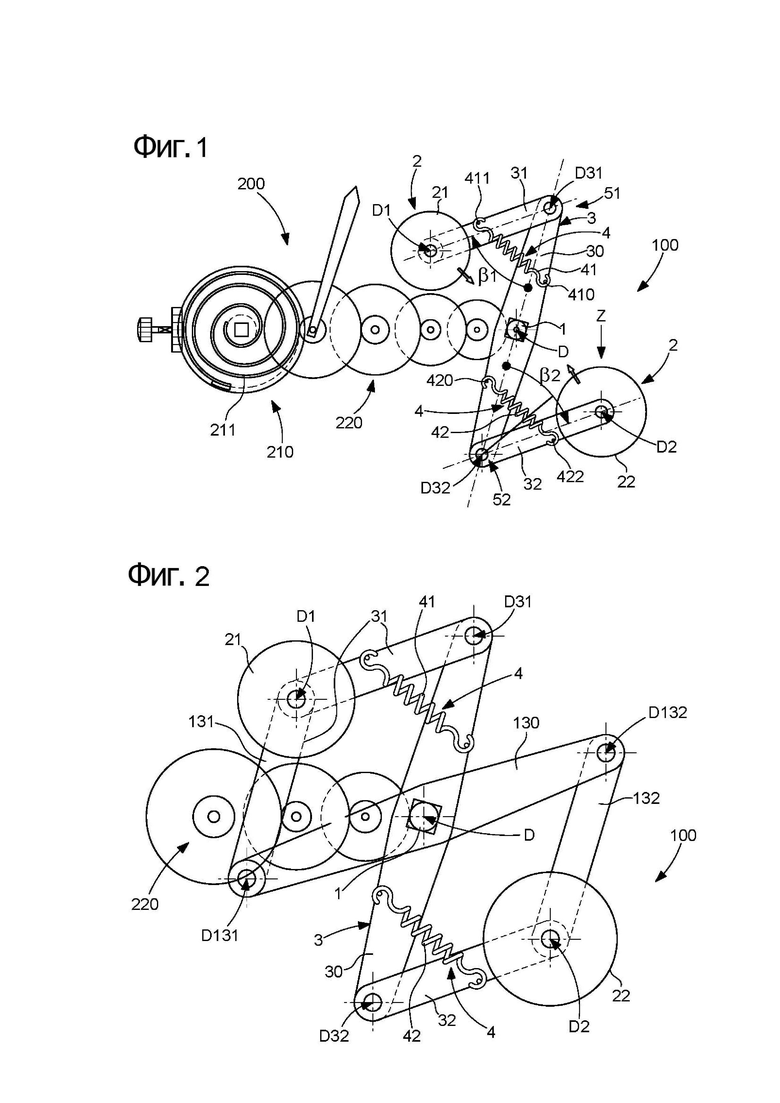
На фиг. 1 показан схематичный вид в плане механического часового механизма, содержащего пружину, приводящую в действие промежуточную зубчатую передачу, которая приводит в действие входной подвижный элемент непрерывно поворачивающегося регулировочного механизма согласно настоящему изобретению в шарнирном варианте исполнения, содержащего два инерционных элемента, закрепленных на рычагах, установленных с возможностью поворота относительно общей структуры, поворачивающейся относительно оси поворота входного подвижного элемента, причем каждый рычаг возвращается к данной оси поворота соответствующим упругим возвратным средством;
на фиг. 2 - вид в плане, аналогичный представленному на фиг. 1, показывающий механизм, полученный путем модификации механизма, показанного на фиг. 1, и содержащий средство для удержания центров масс инерционных элементов на одном и том же расстоянии от оси поворота в любой момент времени, чтобы сделать непрерывно поворачивающийся регулировочный механизм нечувствительным к воздействию гравитации; вышеупомянутое средство представляет собой шарнирный пантограф;
на фиг. 3 - вариант выполнения механизма, показанного на фиг. 2, в котором инерционные элементы соединены с расположенными рядом рычагами пантографа;
на фиг. 4 - вариант выполнения механизма, показанного на фиг. 3, в котором все рычаги заменены инерционными элементами, шарнирно соединенными с центральным подвижным элементом, приводимым в действие промежуточной зубчатой передачей, и дополнительным центральным подвижным элементом, совместно образующими пересечение в центре пантографа;
на фиг. 5 - схема ромбовидного полупантографа со сторонами любых размеров,
на фиг. 6 приведена схема того же самого полупантографа, демонстрирующая полярные координаты центра масс сегмента j;
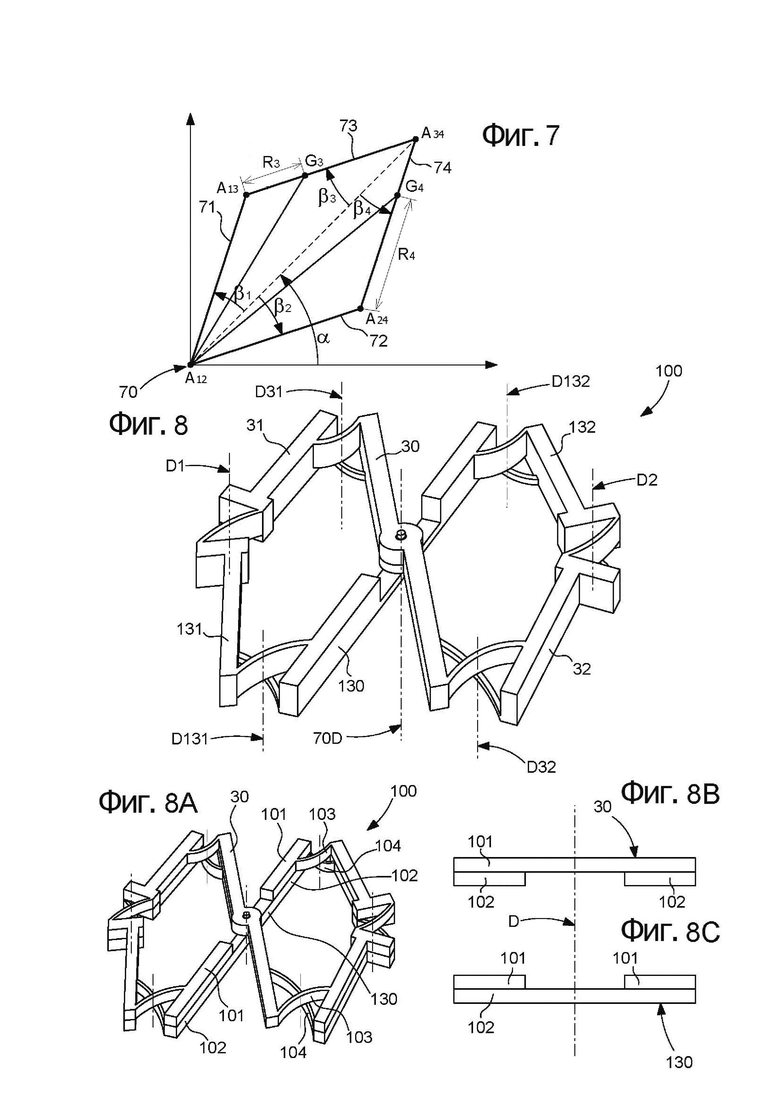
на фиг. 7 - схема, аналогичная приведенной на фиг. 6, для конкретного случая правильного равнобедренного ромбовидного полупантографа, все рычаги между шарнирами которого имеют одинаковую длину;
на фиг. 8 - схематичное перспективное изображение еще одного варианта со структурой, близкой к показанным на фиг. 3 и 4, без шарнирных соединений, кроме оси поворота, в котором рычаги, образующие сегменты пантографа, образуют инерционные элементы, и соединения между этими рычагами имеют гибкие направляющие средства с выступающими перекрещивающимися пластинками;
на фиг. 8А - предпочтительный вариант в изображении, аналогичном показанному на фиг. 8, содержащий наложенную цельную верхнюю структуру, включающую в себя все верхние пластинки, и цельную нижнюю структуру, включающую в себя все нижние пластинки; фиг. 8B и 8C - виды сбоку центрального подвижного элемента и дополнительного центрального подвижного элемента этого пантографа;
на фиг. 9 и 10 - соответственно схематический вид в плане и схематическое перспективное изображение варианта выполнения жесткой кинематической связи между двумя инерционными элементами, содержащей аксиальное промежуточное зубчатое колесо, непрерывно взаимодействующее с двумя зубчатыми секторами, выполненными заодно с инерционными элементами, шарнирно связанными в общую структуру гибкими направляющими средствами с выступающими перекрещивающимися пластинками;
на фиг. 11 - схематичный вид в плане варианта пантографа, центральный подвижный элемент которого прикреплен к входному подвижному элементу упругим соединением, а дополнительный центральный подвижный элемент которого прикреплен к входному подвижному элементу другим упругим соединением;
на фиг. 12 - схематичный вид в плане еще одного варианта кинематической связи с радиальным линейным направлением с радиальным направляющим стержнем, скользящим в отверстиях инерционных элементов, в котором в качестве упругих возвратных средств инерционных элементов используются V-образные пружины;
на фиг. 13 - схематичный вид в плане еще одного варианта, в котором кинематическая связь содержит криволинейные направляющие средства в виде криволинейного паза на центральном подвижном элементе и штифта на соответствующем инерционном элементе, причем упругие возвратные средства образованы двумя упругими пластинками, параллельными друг другу, которые ограничивают перемещение каждого инерционного элемента одной степенью свободы;
на фиг. 14 - схематичный вид в плане структуры, похожей на структуру, показанную на фиг. 9, содержащей аксиальное промежуточное зубчатое колесо, взаимодействующее с двумя промежуточными зубчатыми колесами, входящими в зацепление с колесами, связанными с инерционными элементами, и рычаги, шарнирно соединенные в общую структуру обычными пружинами растяжения;
на фиг. 15 - схематичный вид в плане варианта с гибкой кинематической связью, в котором в качестве общей структуры используется гибкая пластинка, на которой установлены инерционные элементы, к каждому из которых прикреплен опорный рычаг зубчатого элемента, взаимодействующий с аксиальным промежуточным зубчатым колесом;
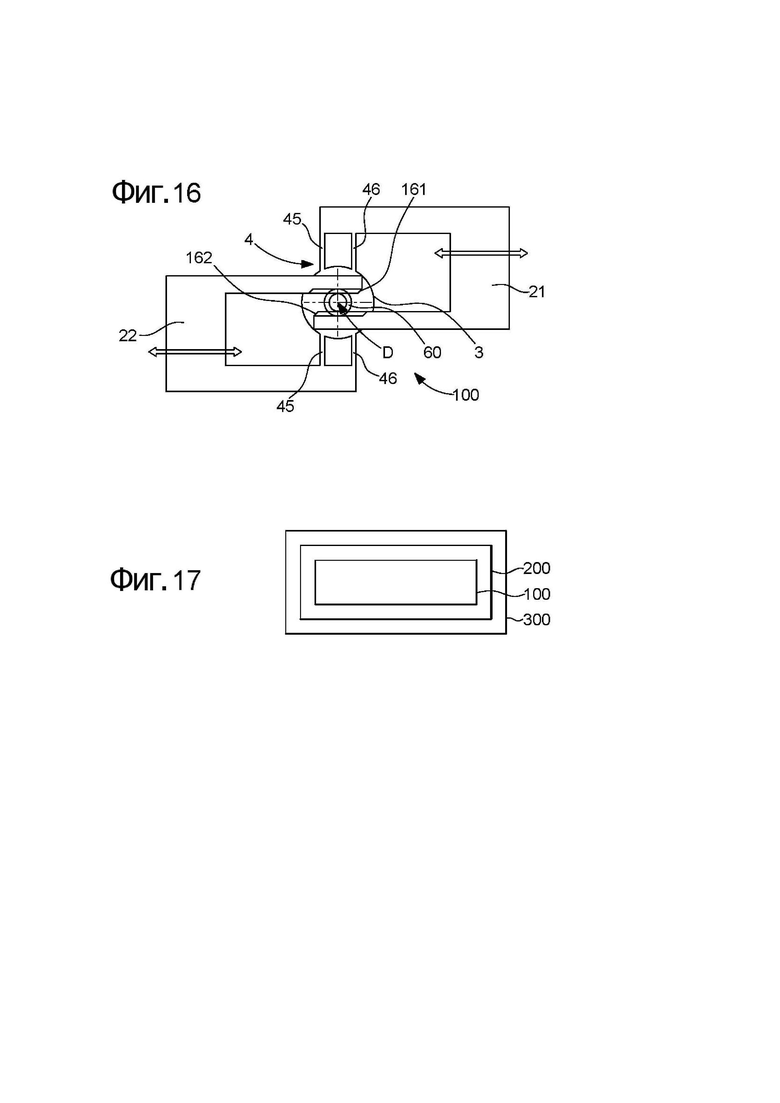
на фиг. 16 - схематичный вид в плане варианта, показанного на фиг. 15, содержащего упругие возвратные средства в виде двух параллельных упругих пластинок для каждого инерционного элемента, ограничивающих перемещение каждого инерционного элемента одной степенью свободы;
на фиг. 17 - блок-схема наручных или карманных часов, содержащих часовой механизм, содержащий непрерывно поворачивающийся регулировочный механизм согласно настоящему изобретению.
Осуществление изобретения
Настоящее изобретение относится к резонаторному механизму 100 для часового механизма 200, предназначенного, прежде всего, для использования в наручных или карманных часах 300. Фактически, резонаторный механизм 100 согласно настоящему изобретению является изохронным, нечувствительным к своему положению в гравитационном поле, и если даже не является абсолютно нечувствительным к ударным воздействиям и помехам, то по меньшей мере восстанавливает свою нормальную работу очень быстро.
Этот резонаторный механизм 100 является поворотным резонатором. Его отличительной особенностью является то, что он не содержит стандартного спускового механизма и работает непрерывно. Отсутствие ударов дает возможность существенного повышения энергетического КПД по сравнению с классическим резонатором, включающим в себя пружинный баланс, соединенный со спусковым механизмом.
Этот резонаторный механизм 100 содержит входной подвижный элемент 1, установленный с возможностью поворота вокруг оси D поворота. На этот входной подвижный элемент 1 действует приводной крутящий момент. На фиг. 1 показана классическая конфигурация часового механизма 200, содержащего средство 210 накопления и хранения энергии, в рассматриваемом случае (неограничивающий вариант) представляющего собой пружину 211, приводящую в движение зубчатую передачу 220, в частности промежуточную зубчатую передачу, которая, в свою очередь, приводит в движение входной подвижный элемент 1, на который, таким образом, воздействует крутящий момент от промежуточной зубчатой передачи.
Согласно настоящему изобретению резонаторный механизм 100 содержит общую структуру, деформируемую или шарнирную, которая соединена с входным подвижным элементом 1 с возможностью поворота вокруг оси D поворота. Данная общая структура несет на себе или содержит множество N инерционных элементов 2. Эта общая структура также непрерывно поворачивается. Возвратно-поступательное движение при этом отсутствует; при воздействии на неё приводного крутящего момента общая структура совершает только поворотное движение. Это не мешает общей структуре быть обратимой и способной совершать поворот в другом направлении, если на неё будет воздействовать крутящий момент противоположного направления.
Каждый инерционный элемент 2 имеет по меньшей мере одну степень свободы относительно общей структуры.
Каждый инерционный элемент 2 возвращается к оси D поворота упругими возвратными средствами 4, оказывающими возвращающее усилие на центр масс данного инерционного элемента 2.
Согласно настоящему изобретению, эти упругие возвратные средства 4 установлены на поворотном резонаторном механизме 100.
Это возвращающее усилие направлено к оси D поворота, и его интенсивность пропорциональна расстоянию RG между осью D поворота и центром масс указанного инерционного элемента 2.
В конкретном варианте одни и те же упругие возвратные средства 4 являются общими для нескольких инерционных элементов, и, в частности, они могут представлять собой пружины растяжения, соединенные с осями инерциальных масс, и т.п.
В еще одном варианте осуществления изобретения, показанном, в частности, на фиг. 1, 2, 12, 13, 14, в котором резонаторный механизм 100 является шарнирным, такие упругие возвратные средства 4 установлены между общей структурой с одной стороны и инерциальной массой 2 или опорным рычагом 31, 32 инерциальной массы 2 с другой стороны.
Еще в одном возможном варианте, как видно из фиг. 15, общая структура является упруго-деформируемой и сама образует такие упругие возвратные средства 4.
Резонаторный механизм 100 обладает симметрией относительно оси порядка N, где N - количество инерциальных масс 2. Это представляет собой отличие от упомянутых выше известных примеров.
В варианте, в котором резонаторный механизм 100 является шарнирным, каждый инерционный элемент 2 направляется прямо или косвенно рычагами или дополнительными шарнирными системами относительно общей структуры по меньшей мере одним направляющим средством.
Таким образом, на фиг. 1 показан пример, в котором общая структура содержит центральный подвижный элемент 30, на двух концах которого установлены оси 51, 52, для обеспечения поворота относительно осей D31 и D32, причем на осях 51, 52 соответственно установлены рычаги 31, 32, на которых установлены инерционные элементы 2 (21 и 22), которые, в зависимости от конкретного варианта осуществления изобретения, могут быть либо свободно установлены на этих рычагах 31, 32 в местах расположения осей D1, D2, проходящих через центр масс инерционных элементов, или могут быть неподвижно установлены на этих рычагах.
В варианте, показанном на фиг. 1, упругие возвратные средства 4 поворачиваются и разделены; эти упругие возвратные средства 41 и 42 установлены между центральным подвижным элементом 30 общей структуры 3 в месте 410, 420 внутреннего крепления с одной стороны и рычагом 31, 32 в месте 411, 422 внешнего крепления с другой стороны.
Понятно, что каждый инерционный элемент 2 может иметь вращательную степень свободы, как и в большинстве других случаев, показанных на приведенных здесь чертежах, или степень свободы по прямолинейному движению, как показано на фиг. 12.
В случае, когда каждый инерционный элемент 2 имеет вращательную степень свободы, а более конкретно, упругие возвратные средства 4 создают упругий потенциал, сравнимый с общим потенциалом упругой энергии, определяемым следующим уравнением:
где:
- Vtot - упругий потенциал, характеризующий энергию упругой деформации;
- Σj - сумма по j величины, заключенной в скобки;
- ω0 - требуемая скорость вращения;
- Rj(βi) - положение центра масс инерционного элемента j в зависимости от количества степеней свободы βi;
- Mj - масса инерционного элемента j.
Более конкретно, Rj(βi) имеет только одно значение Rj, и возвратное средство создает упругий потенциал, который характеризуется следующим уравнением:
где:
- V - упругий потенциал;
- Σj - сумма по j величины в скобках;
- (dα0/dt) - требуемая скорость вращения;
- Rj - расстояние от оси вращения до центра масс G указанного инерционного элемента 2;
- Mj - масса указанного инерционного элемента.
Понятно, что в приведенном на фиг. 1 примере с шарнирными соединениями, содержащем два инерционных элемента 21 и 22, резонаторный механизм 100 согласно настоящему изобретению в любой момент времени должен перемещаться по трем углам: по углу, который общая структура 3 образует с платиной часового механизма или тому подобным, и по углам β1 и β2, которые образуют относительно общей структуры 3 центры масс инерционных элементов 21 и 22 вместе с осями D31 и D32 соответствующих направляющих средств 51 и 52. Разумеется, в случае N инерционных элементов, это вопрос регулирования N1+ углов.
Система является саморегулируемой: под действием крутящего момента, передаваемого средством привода часового механизма, каждый инерционный элемент стремится сместиться от оси D поворота в радиальное положение, в котором трение воздуха создает момент сопротивления, который в направлении по касательной уравновешивает крутящий момент, создаваемый входным подвижным элементом 1 относительно центра масс инерционного элемента. В радиальном направлении радиальная составляющая возвращающего усилия, передаваемого упругими возвратными средствами 4, компенсируется центробежной силой. Такая двойная тангенциальная и радиальная компенсация определяет радиальное положение центра масс в любой момент времени как функцию мгновенного значения крутящего момента, создаваемого приводным средством. Угловая скорость вращения равна квадратному корню произведения коэффициента жесткости упругих возвратных средств на массу инерционного элемента, в то время как мгновенный радиус центра масс относительно оси D поворота равен квадратному корню из отношения приводного крутящего момента к произведению угловой скорости на коэффициент трения инерционного элемента с окружающей средой.
Центры масс инерционных элементов стремятся приблизиться к оси D поворота, когда приводное средство остановлено, причем их положение при этом соответствует моменту оказания нулевого тягового усилия со стороны упругих возвратных средств 4. Может быть проще сформировать резонаторный механизм 100, в котором инерциальные массы 2 приближаются к оси поворота, в частности, если данные инерциальные массы 2 находятся в одной плоскости и входят в контакт друг с другом, например, в положении покоя, при этом упругие возвратные средства 4 тогда устанавливаются с предварительным напряжением.
В определенных положениях часов 300 возмущение, вносимое полем тяготения, стремится изменить поведение инерционных элементов. Например, стрелкой Z на фиг. 1, направленной вертикально вниз и расположенной в плоскости листа, обозначена вертикаль действия поля тяготения, в результате действия которого инерционный элемент 22 стремится сместиться в сторону от общей структуры 3, в то время как инерционный элемент 21 стремится приблизиться к ней. Если инерционные элементы 2 абсолютно свободны в радиальном направлении, это также может служить причиной того, что они будут располагаться на различных радиусах относительно оси D поворота.
Для устранения такого влияния поля тяготения нужно создать систему передачи, уменьшающую число степеней свободы каждого инерционного элемента 2, и сформировать механическое соединение, принудительно определяющее радиальное положение каждого инерционного элемента 2 относительно оси D поворота по отношению к остальным инерционным элементам. Таким образом, центр масс всего резонаторного механизма в целом сможет находиться на оси D поворота. Предпочтительно, устанавливается симметрия относительно оси D поворота.
Предпочтительно, для этого поворотный резонаторный механизм 100 содержит кинематическую связь, более конкретно, жесткую кинематическую связь, между по меньшей мере двумя инерционными элементами 2, предпочтительно между всеми инерционными элементами 2. Эта кинематическая связь заставляет все инерционные элементы 2 постоянно располагаться на одинаковом расстоянии от оси D поворота. Это означает, что инерционные элементы 2 более не имеют степень свободы относительно общей структуры 3.
Такая кинематическая связь подходит для низких частот, в частности от 2 до 5 Гц. С другой стороны, если скорость вращения общей структуры 3 возрастает, и становится, в частности, больше или равной 20 Гц, например порядка 50 Гц, влияние поля тяготения становится пренебрежимо малым по сравнению с влиянием инерции, и такая кинематическая связь не является существенной. Очень простая конфигурация может быть использована в устройствах одноразового применения, таких как фейерверк или аналогичные устройства. Однако кинематическая связь становится необходимой, если мы стремимся получить хорошие хронометрические характеристики, в частности, для наручных или карманных часов.
Различные примеры исполнения таких кинематических связей показаны на фиг. 2, 3, 4, 8, 9, 10, 12, 13, 14, 15 и 16 и будут рассмотрены ниже. Большинство из них представляют собой жесткие шарнирные кинематические связи, но некоторые являются гибкими кинематическими связями.
На фиг. 2 показан предпочтительный вариант осуществления настоящего изобретения в развернутом положении, кинематическая связь в котором сформирована с помощью пантографической структуры; резонаторный механизм 100 содержит пантографическую структуру, шарнирно и симметрично установленную относительно оси D поворота, в которой по меньшей мере все инерционные элементы 2 шарнирно присоединены прямо или косвенно с помощью рычагов, которым, в зависимости от варианта осуществления изобретения, присвоены ссылочные позиции 31, 32, 131, 132, 121, 122, 123, 124 и которые расположены вокруг центрального подвижного элемента 30 и дополнительного подвижного элемента 130, который также установлен с возможностью поворота относительно оси D поворота и который совместно с центральным подвижным элементом 30 образует крестообразную структуру. Термином "рычаг" в настоящем описании обозначается компонент, имеющий два шарнирных соединения.
"Пантографом" здесь называется двойная структура, шарнирно установленная вокруг центральной оси и имеющая двойную ромбовидную форму, как более подробно показано на прилагаемых чертежах. Термин "полупантограф" служит для обозначения части вышеуказанной структуры, расположенной с одной стороны относительно центральной оси. Пантограф содержит два полупантографа, имеющих общие элементы, образующие крестообразную структуру.
Более конкретно, эта крестообразная структура, образованная центральным подвижным элементом 30 и дополнительным центральным подвижным элементом 130, имеет центр масс, расположенный на оси D поворота.
Итак, как показано на фиг. 2, кинематическая связь и направляющие средства сформированы путем объединения, на основе примера, приведенного на фиг. 1, центрального подвижного элемента 30, дополнительного центрального подвижного элемента 130, установленных с возможностью поворота относительно оси D поворота в месте расположения осевой опоры, двух рычагов 31 и 32, шарнирно установленных на центральном подвижном элементе 30, двух других дополнительных рычагов 131 и 132, шарнирно установленных с возможностью свободного поворота на дополнительном центральном подвижном элементе 130 вокруг осей D131 и D132 в местах расположения опор (подробно не показаны) и на инерционных элементах 21 и 22 в местах расположения осей D1 и D2, а также семи шарниров, необходимых для работы данного устройства, с целью образования пантографа, имеющего симметрию вращения порядка 2.
В конкретном варианте дополнительный центральный подвижный элемент 130 свободно поворачивается относительно оси D поворота.
Упругие возвратные средства 41 и 42 такие же, какие были показаны на фиг. 1, поскольку стержневая конструкция, образуемая двумя рычагами 131 и 132 вокруг дополнительного центрального подвижного элемента 130, является пассивной, и единственная её функция заключается в удержании центров масс инерционных элементов 21 и 22 в симметричном положении относительно оси D поворота.
Естественно, как видно из вариантов, показанных на фиг. 3 и 4, некоторые рычаги сами могут образовывать инерционные элементы. В варианте, показанном в сложенном положении на фиг. 3, который является очень похожим на вариант, изображенный на фиг. 2, инерционный элемент 21 и дополнительный рычаг 131 объединены друг с другом, образуя инерционный элемент 121, а инерционный элемент 22 и дополнительный рычаг 132 образуют инерционный элемент 123, рычаг 31 образует инерционный элемент 122, а рычаг 32 образует инерционный элемент 124.
Более конкретно, все инерционные элементы 2 шарнирно установлены непосредственно на центральном подвижном элементе 30 и дополнительном центральном подвижном элементе 130. Таким образом, очень компактный вариант осуществления изобретения, показанный на фиг. 4, содержит четыре инерционных элемента, которые образуют рычаги 31, 32, 131, 132, шарнирно присоединенные и образующие пантограф вокруг центрального подвижного элемента 30 и дополнительного центрального подвижного элемента 130.
На фиг. 5 и 6 представлены схемы полупантографа с полярными координатами центра масс сегмента j на фиг. 6. В данном описании термин "сегмент" используется для геометрического определения стороны ромба полупантографа, а термином "рычаг" обозначается физический компонент механизма.
На фиг. 7 показан частный случай правильного ромба полупантографа, в котором:
β1 = β2 = β3 = β4,
а центры масс G3 и G4 сегментов 73 и 74 расположены на прямой, соединяющей шарниры с обеих сторон указанных сегментов, соответственно A13 с A34 и A24 с A34.
В случае любого полупантографа, как видно из фиг. 5 и 6, четырехсторонний пантограф любой формы содержит четыре сегмента 71, 72, 73, 74, шарнирно соединенных друг с другом вокруг шарнирной оси, образуемой главным шарниром 70 или осью D поворота. Центральный подвижный элемент 30 образован двумя первыми сегментами 71, продолжающими друг друга относительно главного шарнира 70, а дополнительный центральный подвижный элемент 130 образован двумя вторыми сегментами 72, продолжающими друг друга относительно главного шарнира 70. Упругие возвратные средства 4 создают потенциальную энергию V, величина которой зависит от угла β1 деформации элемента пантографа согласно следующему уравнению:

(это условие гарантирует изохронность любого пантографа),
где:
- V(β1) - потенциал в зависимости от угла β1;
- β1 - угол раскрытия пантографа, т.е. угол между, с одной стороны, прямой, соединяющей точку пантографа, расположенную напротив шарнирной оси, с шарнирной осью, и, с другой стороны, указанным сегментом;
- ω0 = dα0/dt - скорость вращения поворотного резонаторного механизма 100;
- Σ - сумма по j величины в скобках;
- Mj - масса инерционного элемента 2 с номером j;
- Rj(β1) - расстояние от оси поворота до центра масс Gj инерционного элемента 2 с номером j;
- R'j(β1) - производная по β1 от расстояния от шарнирной оси до центра масс инерционного элемента 2 с номером j.
Более конкретно, центр масс каждого рычага (31; 32; 131; 132; 121, 122, 123, 124), заключенного между двумя шарнирами, расположен на прямой, соединяющей эти два шарнира, расположенных с обеих сторон указанного рычага.
Более конкретно, в частности, для вариантов, показанных на фиг. 4 и 7, каждый элемент полупантографа содержит четыре сегмента одинаковой длины L, образующих вместе правильный ромб. Центры масс центрального подвижного элемента 30 и дополнительного центрального подвижного элемента 130 расположены на оси D поворота резонаторного механизма 100, а центр масс каждого из инерциальных рычагов расположен на прямой между двумя шарнирами соответствующего рычага.
Более конкретно, в соответствии с обозначениями, приведенными на фиг. 7, потенциальная энергия Vtot упругих возвратных средств связана с углом их деформации следующим уравнением:

где:
- β1 - угол раскрытия пантографа;
- L - длина каждого сегмента между шарнирами;
- M3 - масса третьего сегмента 73, образующего один из двух инерционных элементов напротив шарнирной оси, образованной главным шарниром 70 или осью D поворота, и расположенного между первым боковым шарниром A13 и апексным шарниром A34, расположенным напротив осевого шарнира A12, образующего главный шарнир 70;
- M4 - масса четвертого сегмента 74, образующего другой из двух инерционных элементов напротив указанной шарнирной оси и расположенного между вторым боковым шарниром A24 и апексным шарниром A34;
- R3 - расстояние от первого бокового шарнира A13 до центра масс G3 третьего сегмента 73;
- R4 - расстояние от второго бокового шарнира A24 до центра масс G4 четвертого сегмента 74;
- dα0/dt - скорость вращения поворотного резонатора.
Такой пантографический тип структуры в сочетании с соответствующими упругими возвратными средствами дает возможность формирования механизма, теоретически способного обеспечивать постоянство периода вращения входного подвижного элемента 1 и нечувствительность к положению в поле тяготения Земли.
Практическая реализация такого механизма, тем не менее, требует осторожности вследствие большого количества шарнирных направляющих средств, создающих трение и обуславливающих потерю эффективности.
Ниже будут рассмотрены другие типы кинематических связей.
Для снижения высокой стоимости шарнирных систем, связанной с необходимостью точной механической обработки и обеспечения параллельности осей, а также во избежание потерь эффективности вследствие трения в шарнирах, предлагается еще один конкретный вариант осуществления настоящего изобретения, в котором по меньшей мере один из направляющих элементов и по меньшей мере одно из упругих возвратных средств 4 соединены друг с другом гибким направляющим средством. Это означает, что различные функции направления и обеспечения упругости осуществляются одним и тем же гибким направляющим средством. Более конкретно, за исключением направляющих средств на оси поворота, все поворотные направляющие средства и упругие возвратные средства выполнены в виде гибких направляющих средств.
Более конкретно, по меньшей мере одно такое гибкое направляющее средство содержит по меньшей мере две пластинки, расположенные в плоскостях и совместно определяющие виртуальную ось поворота гибкого поворотного направляющего средства.
Более конкретно, в структуре пантографического типа, описанной выше, по меньшей мере четыре ее шарнира образованы гибкими поворотными направляющими средствами.
Таким образом, на фиг. 8 представлена структура, похожая на структуру, показанную на фиг. 3 и 4, без шарниров, за исключением шарнира в месте расположения оси D поворота, в которой рычаги 31, 131, 32, 132, образующие сегменты пантографа, являются инерционными элементами. В данном неограничивающем варианте осуществления изобретения каждое гибкое направляющее средство содержит две пластинки, расположенные в параллельных и отдельных уровнях и пересекающиеся в месте прохождения шарнирных осей D31, D1, D131, D132, D2 и D32 в проекции на параллельную плоскость.
Эта простая конфигурация показана на фиг. 8A, 8B и 8C; она состоит из наложенных друг на друга цельной верхней структуры 101, содержащей все верхние пластинки 103, и цельной нижней структуры 102, содержащей все нижние пластинки 104. Эти верхняя 101 и нижняя 102 структуры могут быть соединены друг с другом очень быстро, например, путем склеивания, с помощью заклепок или других средств, и радиальные положения различных шарниров, так же, как и симметрия инерционных элементов относительно оси D поворота являются очень точными.
Более конкретно, эти гибкие поворотные направляющие средства между двумя компонентами представляют собой такие средства с выступающими перекрещивающимися пластинками, как указано выше, угол θ раскрытия которых в проекции на плоскость между осью C пересечения и точками крепления пластинок на одном из компонентов составляет 40°±4°, и точка пересечения пластинок находится на части длины, составляющей 0,15±0,015 от длины. Такое пересечение может быть выполнено как рядом с наиболее мобильным компонентом, т.е. компонентом с наиболее значительным перемещением, так и рядом с наименее мобильным компонентом, и оно в целом определяется размерами компонентов для обеспечения требуемого расстояния между точками крепления пластинок.
Более конкретно, гибкие направляющие средства выполняются из оксидированного кремния для компенсации термического влияния.
На фиг. 9-16 показано несколько вариантов, которые при необходимости обеспечивают радиальную симметрию перемещения центров масс инерционных элементов с помощью жестких шарнирных кинематических связей или гибких кинематических связей.
Для установления жесткой кинематической связи между инерционными элементами 2 (21 и 22) устройство, показанное на фиг. 9 и 10 снабжено зубчатым колесом 60, свободно вращающимся относительно оси D поворота и непрерывно взаимодействующим с двумя зубчатыми секторами 61 и 62, жестко соединенными с инерционными элементами 21 и 22. Вышеупомянутые инерционные элементы здесь показаны шарнирно соединенными с общей структурой 3 гибкими направляющими средствами с перекрещивающимися пластинками 41 и 42.
В конкретном варианте структуры пантографического типа с центральным подвижным элементом 30 и дополнительным центральным подвижным элементом 130 центральный подвижный элемент 30 прикреплен к входному подвижному элементу 1 упругим соединением 80, а дополнительный центральный подвижный элемент 130 поворачивается относительно оси D поворота, но это поворотное движение ограничивается упругим соединением, соединяющим его с входным подвижным элементом 1. В данном конкретном варианте, представленном на фиг. 11, центральный подвижный элемент 30 и дополнительный центральный подвижный элемент 130 подвержены воздействию приводного крутящего момента, величина которого равна половине эквивалентного крутящего момента классического спускового механизма.
Более конкретно, данное упругое соединение 80 представляет собой гибкое поворотное направляющее средство, содержащее две упругие пластинки.
На фиг. 12 показан еще один вариант осуществления изобретения, в котором кинематическая связь содержит радиальное линейное направляющее средство 90 с радиальным направляющим стержнем 91, скользящим в отверстиях 911 и 912 инерционных элементов 21 и 22. Упругие возвратные средства 4 здесь выполнены в виде V-образных пружин 41, 42.
На фиг. 13 изображен еще один возможный вариант осуществления изобретения, в котором кинематическая связь содержит криволинейные направляющие средства 95, включающие в себя криволинейный паз 35 центрального подвижного элемента 30 и штифт 25, закрепленный на соответствующем инерционном элементе 21, 22. В этом варианте для остановки и возврата каждого инерционного элемента 21, 22 используется упругое возвратное средство 4, содержащее две упругие пластинки 45 и 46, практически параллельные друг другу, с целью ограничения перемещения каждого инерционного элемента 21, 22 одной степенью свободы.
На фиг. 14 показана структура, похожая на структуру, изображенную на фиг. 9, и содержащая зубчатое колесо 60, свободно установленное концентрично оси D поворота и непрерывно взаимодействующее с двумя промежуточными колесами 610 и 620, которые, в свою очередь, входят в зацепление с колесами или зубчатыми секторами 61 и 62, соединенными с инерционными элементами 21 и 22 и рычагами 31 и 32. Рычаги в данном случае соединены с общей структурой 3 шарнирами и классическими пружинами растяжения.
На фиг. 15 показан вариант, кинематическая связь которого является не жесткой, а гибкой, и общая структура 3 выполнена в виде упругой пластинки, к которой прикреплены инерционные элементы 21 и 22, к каждому из которых прикреплен опорный рычаг зубчатого элемента 161, 162, взаимодействующий с аксиальным промежуточным зубчатым колесом 60. Конструкция этого механизма очень проста, однако инерционные элементы 21 и 22 в нем могут перемещаться с двумя степенями свободы.
Конфигурация, показанная на фиг. 16, решает эту проблему путем применения, как и в механизме на фиг. 13, для останова и возврата каждого инерционного элемента 21, 22, упругого возвратного средства 4, содержащего две упругие пластинки 45 и 46, практически параллельные друг другу, с целью ограничения перемещения каждого инерционного элемента 21, 22 одной степенью свободы.
В конкретной конфигурации весь резонаторный механизм 100 (направляющее средство, инерционный элемент, упругие возвратные средства, рычаги, зубчатая передача) выполнены в виде единого устройства. Узел поворотного резонатора может быть выполнен из кремния, обрабатываемого, например, посредством многоуровневого глубинного реактивного ионного травления. Если такой способ изготовления является непрактичным, в частности, при применении перекрещивающихся пластинок на разных уровнях, можно успешно использовать цельную верхнюю структуру 101 и цельную нижнюю структуру 102, изготовление каждой из которых является достаточно простым, накладываемых друг на друга, как показано на фиг. 8A, и соединяемых путем склеивания, с помощью заклепок или других средств. Более конкретно, цельная верхняя структура 101 и цельная нижняя структура 102 соединяются друг с другом необратимо, образуя цельный элемент, и уже не могут быть разделены.
В конкретном варианте осуществления изобретения частота вращения поворотного резонаторного механизма 100 составляет более 20 Гц, в частности более 50 Гц. Такая сравнительно высокая частота вращения обеспечивает ограничение чувствительности механизма к положению в поле тяготения Земли в случае отсутствия кинематической связи.
Понятно, что настоящее изобретение, разработанное для измерения времени, может быть использовано также и в других механизмах, например, в регуляторе ударного механизма или в других механизмах.
В поворотном резонаторе устанавливаются упругие возвратные средства согласно настоящему изобретению, что значительно упрощает его конструкцию.
Кроме того, средства кинематической связи настоящего изобретения уменьшают число степеней свободы системы, полностью ограничивая перемещение масс, в то время как в известном уровне техники связь является гибкой и не может ограничивать число степеней свободы.
Объектом настоящего изобретения является также часовой механизм 200, содержащий опорную платину для средств 210 накопления и хранения энергии, в частности по меньшей мере одной пружины 211, служащей, как это традиционно принято, для привода зубчатой передачи 220, в частности промежуточной зубчатой передачи, которая, в свою очередь, приводит в движение входной подвижный элемент 1 такого поворотного резонаторного механизма 100, входящего в состав данного часового механизма 200.
Объектом изобретения являются также часы, в частности наручные или карманные часы 300, содержащие по меньшей мере один часовой механизм 200 и/или такой поворотный резонаторный механизм 100.
Настоящее изобретение обеспечивает различные преимущества, в частности:
- устранение традиционного спускового механизма, что позволяет упростить конструкцию механизма;
- устранение действия трения в шарнирах пружинного баланса, что позволяет повысить коэффициент качества резонаторного механизма;
- устранение ударов в спусковом механизме, что позволяет повысить его эффективность;
- увеличение запаса мощности и/или точности современных механических наручных или карманных часов.
Для данного размера часового механизма можно в пять раз увеличить автономию часов и в два раза увеличить мощность регулирования часов. Это равносильно утверждению, что настоящее изобретение обеспечивает 10-кратное повышение рабочих характеристик часового механизма.




Резонаторный механизм (100) для часового механизма, содержащий центральный подвижный элемент (30), установленный с возможностью поворота относительно оси (D) входного подвижного элемента (1), подверженного действию приводного крутящего момента, непрерывно поворачивающийся и содержащий множество инерционных элементов (2), состоящее из N инерционных элементов (2), каждый из которых является подвижным относительно центрального подвижного элемента (30) и возвращается к оси (D) упругими возвратными средствами (4). Данный резонаторный механизм (100) обладает вращательной симметрией порядка N и содержит средства кинематической связи между всеми указанными инерционными элементами (2), удерживающие в любой момент времени центры масс всех указанных инерционных элементов (2) на одном и том же расстоянии от указанной оси (D) поворота, причем указанные упругие возвратные средства (4) создают упругий потенциал, определяемый следующим уравнением:
где Vtot - упругий потенциал; Σj - сумма по j величины в скобках; (dα0/dt) - требуемая скорость вращения; Rj - положение центра масс G инерционного элемента j массой Mj. 3 н. и 21 з.п. ф-лы, 17 ил.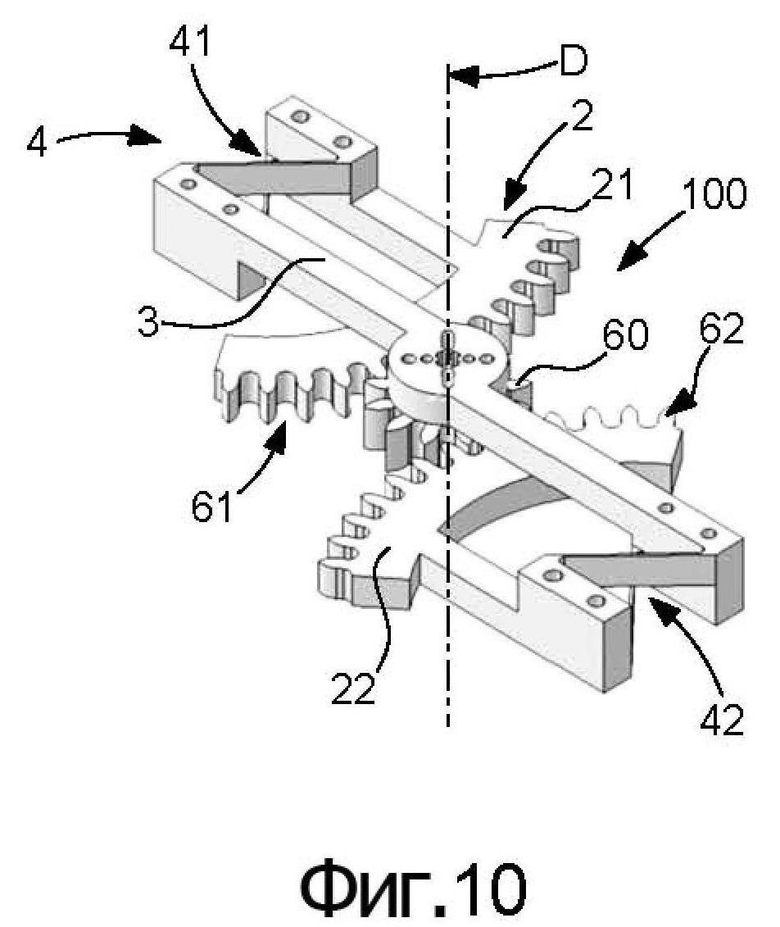
1. Резонаторный механизм (100) для часового механизма, содержащий входной подвижный элемент (1), установленный с возможностью поворота относительно оси (D) поворота и подверженный действию приводного крутящего момента, и центральный подвижный элемент (30), соединенный с указанным входным подвижным элементом (1) с возможностью поворота относительно указанной оси (D) поворота и выполненный с возможностью непрерывно поворачиваться, причем указанный резонаторный механизм (100) содержит множество инерционных элементов (2), состоящее из N инерционных элементов (2), каждый из которых выполнен с возможностью перемещения относительно указанного центрального подвижного элемента (30) и возврата к указанной оси (D) поворота упругими возвратными средствами (4), входящими в состав указанного резонаторного механизма (100) и выполненными с возможностью оказывать возвращающее усилие на центр масс указанного инерционного элемента (2), при этом указанный резонаторный механизм (100) обладает вращательной симметрией порядка N, отличающийся тем, что указанный резонаторный механизм (100) содержит средства кинематической связи между всеми указанными инерционными элементами (2), которые выполнены с возможностью удержания в любой момент времени центров масс указанных инерционных элементов (2) на одном и том же расстоянии от указанной оси (D) поворота, причем указанные упругие возвратные средства (4), являющиеся поворотными и установленными на указанном резонаторном механизме (100), выполнены с возможностью создания упругого потенциала, определяемого следующим уравнением:

где V - упругий потенциал;
Σj - сумма по j величины в скобках;
(dα0/dt) - требуемая скорость вращения;
Rj - расстояние от оси поворота до центра масс G указанного инерционного элемента (2);
Mj - масса указанного инерционного элемента.
2. Резонаторный механизм (100) по п. 1, отличающийся тем, что указанный резонаторный механизм (100) имеет пантографическую структуру, шарнирно установленную вокруг указанной оси (D) поворота, в которой по меньшей мере все указанные инерционные элементы (2) шарнирно установлены прямо или косвенно с помощью рычагов (31; 32; 131; 132; 121; 122; 123; 124) вокруг указанного центрального подвижного элемента (30) и дополнительного центрального подвижного элемента (130), который выполнен с возможностью поворота относительно указанной оси (D) поворота и который совместно с центральным подвижным элементом (30) образует крестообразную структуру.
3. Резонаторный механизм (100) по п. 2, отличающийся тем, что центр масс указанной крестообразной структуры, образованной указанным центральным подвижным элементом (30) и указанным дополнительным центральным подвижным элементом (130), расположен на указанной оси (D) поворота.
4. Резонаторный механизм (100) по п. 2, отличающийся тем, что каждый элемент указанного пантографа содержит четыре сегмента (71, 72, 73, 74), шарнирно соединенных друг с другом и шарнирно установленных относительно шарнирной оси, образованной главным шарниром (70) или указанной осью (D) поворота, причем указанный центральный подвижный элемент (30) образован двумя первыми сегментами (71), являющимися продолжением друг друга относительно указанного главного шарнира (70), а указанный дополнительный центральный подвижный элемент (130) образован двумя вторыми сегментами (72), являющимися продолжением друг друга относительно указанного главного шарнира (70), при этом указанные упругие возвратные средства (4) выполнены с возможностью генерирования потенциальной энергии V, величина которой зависит от угла β1 деформации указанного пантографического элемента в соответствии с уравнением:

где V(β1) - потенциал в зависимости от угла β1;
β1 - угол раскрытия пантографа, который является углом между, с одной стороны, прямой, соединяющей точку пантографа, расположенную напротив шарнирной оси, с шарнирной осью, и, с другой стороны, данным сегментом;
dα0/dt - скорость вращения указанного поворотного резонаторного механизма (100);
Σj - сумма по j величины в скобках;
Mj - масса инерционного элемента (2) с номером j;
Rj(β1) - расстояние от оси поворота до центра масс Gj инерционного элемента (2);
R'j(β1) - производная по β1 от расстояния от шарнирной оси до центра масс инерционного элемента (2).
5. Резонаторный механизм (100) по п. 2, отличающийся тем, что указанная шарнирная структура образует пантограф, симметричный относительно указанной оси (D) поворота или обладающий симметрией вращения порядка 2 относительно указанной оси (D) поворота.
6. Резонаторный механизм (100) по п. 2, отличающийся тем, что все указанные инерционные элементы (2) шарнирно соединены непосредственно с указанным центральным подвижным элементом (30) и указанным дополнительным центральным подвижным элементом (130).
7. Резонаторный механизм (100) по п. 2, отличающийся тем, что центр масс каждого из указанных рычагов (31; 32; 131; 132; 121; 122; 123; 124), заключенного между двумя шарнирами, расположен на прямой, соединяющей эти два шарнира с обеих сторон указанного данного рычага.
8. Резонаторный механизм (100) по п. 2, отличающийся тем, что каждый элемент указанного пантографа содержит четыре сегмента равной длины, которые вместе образуют правильный ромб.
9. Резонаторный механизм (100) по п. 7, отличающийся тем, что каждый элемент указанного пантографа содержит четыре сегмента равной длины, вместе образующие правильный ромб, при этом потенциальная энергия Vtot указанных упругих возвратных средств (4) связана с углом их деформации следующим уравнением:

где β1 - угол раскрытия пантографа, который является углом между прямой, соединяющей точку пантографа, расположенную напротив шарнирной оси, с шарнирной осью, с одной стороны, и данным сегментом, с другой стороны;
L - длина каждого сегмента между шарнирами;
M3 - масса третьего сегмента (73), образующего один из двух инерционных элементов напротив шарнирной оси, образованной главным шарниром (70) или указанной осью (D) поворота, и расположенного между первым боковым шарниром (A13) и апексным шарниром (A34), расположенным напротив осевого шарнира (A12), образующего главный шарнир (70);
M4 - масса четвертого сегмента (74), образующего другой из двух инерционных элементов напротив указанной шарнирной оси и расположенного между вторым боковым шарниром (A24) и апексным шарниром (A34);
R3 - расстояние от первого бокового шарнира (A13) до центра масс G3 указанного третьего сегмента (73);
R4 - расстояние от второго бокового шарнира (A24) до центра масс G4 указанного четвертого сегмента (74);
dα0/dt - скорость вращения поворотного резонатора.
10. Резонаторный механизм (100) по п. 2, отличающийся тем, что каждый из указанного центрального подвижного элемента (30) и указанного дополнительного центрального подвижного элемента (130) соединен с указанным входным подвижным элементом (1) упругим соединением (80).
11. Резонаторный механизм (100) по п. 10, отличающийся тем, что указанное упругое соединение (80) представляет собой гибкое поворотное направляющее средство, содержащее две упругие пластинки.
12. Резонаторный механизм (100) по п. 2, отличающийся тем, что каждый указанный инерционный элемент (2) направляется прямо или косвенно рычагами или дополнительными шарнирными системами относительно общей структуры по меньшей мере одним направляющим средством, при этом по меньшей мере один из направляющих элементов и по меньшей мере одно из указанных упругих возвратных средств (4) соединены друг с другом гибкими направляющими средствами.
13. Резонаторный механизм (100) по п. 12, отличающийся тем, что за исключением направляющих средств в месте расположения указанной оси (D) поворота, все направляющие во вращении средства и упругие возвратные средства (4), входящие в состав указанного резонаторного механизма (100), образованы гибкими направляющими средствами.
14. Резонаторный механизм (100) по п. 12, отличающийся тем, что по меньшей мере одно указанное гибкое направляющее средство содержит по меньшей мере две упругие пластинки, расположенные в плоскостях, которые совместно определяют виртуальную ось поворота гибкого поворотного направляющего средства.
15. Резонаторный механизм (100) по п. 2, отличающийся тем, что в указанной структуре пантографического типа по меньшей мере четыре из её шарниров образованы гибкими поворотными направляющими средствами, содержащими по меньшей мере две упругие пластинки, расположенные в плоскостях, которые совместно определяют виртуальную ось поворота гибкого поворотного направляющего средства.
16. Резонаторный механизм (100) по п. 14, отличающийся тем, что по меньшей мере одно указанное гибкое поворотное направляющее средство между двумя компонентами представляет собой направляющее средство с перекрещивающимися в проекции на плоскость пластинками, угол θ раскрытия которых в проекции на плоскость между осью C пересечения проекций указанных пластин на указанную плоскость и точками крепления пластинок на одном из компонентов составляет 40 ± 4°, и точка пересечения пластинок находится на части длины, составляющей 0,15 ± 0,015 от длины.
17. Резонаторный механизм (100) по п. 12, отличающийся тем, что указанные гибкие направляющие средства выполнены из оксидированного кремния для компенсации термического влияния.
18. Резонаторный механизм (100) по п. 1, отличающийся тем, что указанные средства кинематической связи между всеми указанными инерционными элементами (2) содержат по меньшей мере одно промежуточное зубчатое колесо (60), установленное с возможностью свободного вращения концентрично указанной оси (D) поворота и непрерывно взаимодействующее с зубчатым сектором или рейкой (61, 62), принадлежащими каждому указанному инерционному элементу.
19. Резонаторный механизм (100) по п. 1, отличающийся тем, что указанные средства кинематической связи содержат радиальное линейное направляющее средство (90) с радиальным направляющим стержнем (91), скользящим в отверстиях (911, 912), выполненных в указанных инерционных элементах (2).
20. Резонаторный механизм (100) по п. 1, отличающийся тем, что весь указанный резонаторный механизм (100) выполнен в виде цельного элемента.
21. Резонаторный механизм (100) по п. 1, отличающийся тем, что указанный резонаторный механизм (100) содержит гибкие направляющие средства с перекрещивающимися на разных уровнях пластинками, а также содержит наложенные друг на друга и скрепленные вместе цельную верхнюю структуру (101), содержащую все верхние пластинки (103), и цельную нижнюю структуру (102), содержащую все нижние пластинки (104).
22. Резонаторный механизм (100) по п. 1, отличающийся тем, что частота вращения указанного поворотного резонаторного механизма (100) составляет более 20 Гц.
23. Часовой механизм (200), содержащий поворотный резонаторный механизм (100) по п. 1 и имеющий опорную платину для средств (210) накопления и хранения энергии или по меньшей мере одной пружины (211) для привода зубчатой передачи (220), служащей для привода входного подвижного элемента (1) указанного поворотного резонаторного механизма (100).
24. Часы (300), содержащие по меньшей мере один часовой механизм (200) по п. 23.
| WO 2015104693 A3, 30.12.2015 | |||
| FR 630831 A, 09.12.1927 | |||
| WO 2015104692 A3, 21.01.2016 | |||
| Устройство для регулирования влаги в смесях | 1957 |
|
SU113025A1 |
| US 2880570 A1, 07.04.1959. | |||

