Область техники, к которой относится изобретение
Изобретение относится к соединительному подвижному элементу для синхронизации нескольких часовых резонаторов, имеющих одинаковую частоту и каждый из которых включает в себя согласующий палец, выполненный с возможностью передачи крутящего момента на соответствующий резонатор, каждый из указанных согласующих пальцев периодически следует по плоской, замкнутой траектории, при этом указанный соединительный подвижный элемент включает в себя, составляющие одно целое с конструкцией, которая поворачивается вокруг оси поворота и включает в себя средства приема крутящего момента, средства для удержания указанных пальцев на равном расстоянии от указанной оси.
Изобретение также относится к часовому механизму, включающему в себя, установленный на главной платине посредством неподвижных элементов, по меньшей мере один из таких уравновешенных резонаторов.
Изобретение также относится к наручным часам, включающим в себя механизм такого типа.
Изобретение относится к области часовых резонаторов.
Уровень техники
Конструкторы часовых изделий непрерывно пытаются решить задачу получения резонаторных механизмов, которые состоят из меньшего количества элементов, имеют пониженное трение и приемлемый изохронизм.
Резонаторы вращательно-криволинейного типа перемещения, образованные посредством последовательного расположения двух генераторов колебаний, снабженных гибкими шарнирами, каждый из которых включает в себя один грузик, подвешенный относительно другого посредством нескольких гибких лент, представляются перспективным направлением. Однако принцип создания подобных резонаторов имеет свои недостатки, в частности, активное противодействие в точке крепления к главной платине часового механизма.
В патентном документе WO 2006/067597 А2 раскрыта паллетная вилка с несколькими плечами для синхронизации нескольких балансов, имеющих одинаковую частоту, у каждого из которых имеется палец, взаимодействующий с разветвлением каждого из плечей паллетной вилки на одинаковом радиусном расстоянии от оси поворота паллетной вилки.
В документе US 22791 А раскрыт механизм с анкерным колесом, имеющим два уровня, каждый из которых взаимодействует с паллетными камнями, находящимися в паллетных вилках, количество которых соответствует количеству периферийных балансов.
Раскрытие изобретения
Изобретение направлено на сведение к минимуму напряжения в точке крепления резонаторного механизма к неподвижным элементам часового механизма, таким как главная платина, и обеспечение в итоге оптимального функционирования системы, невосприимчивости к внешним напряжениям, долговечности и надежности такого резонаторного механизма.
В этой связи, изобретение относится к соединительному подвижному элементу для синхронизации нескольких часовых резонаторов, которые имеют одинаковую частоту и каждый из которых включает в себя согласующий палец, выполненный с возможностью передачи крутящего момента на соответствующий резонатор, каждый из указанных согласующих пальцев периодически следует по плоской, замкнутой траектории, причем указанный соединительный подвижный элемент включает в себя составляющие одно целое с конструкцией, выполненной с возможностью поворота вокруг оси поворота и включающей в себя средства для приема крутящего момента, средства для удержания указанных пальцев на равном расстоянии от указанной оси, причем указанные удерживающие средства включают в себя несколько пазов, составляющих одно целое с указанной конструкцией, каждый из которых проходит, по существу, радиально относительно указанной оси, в плоскости, перпендикулярной указанной оси, для приема каждого из указанных пальцев, указанные пазы расположены попарно симметрично относительно главного, прямого паза, проходящего через указанную ось, в плоскости, перпендикулярной указанной оси; внутри указанного главного паза расположен главный ползун, выполненный с возможностью свободного скольжения и взаимодействующий с несколькими штангами, каждая из которых приспособлена для шарнирного соединения одной стороной с одним из указанных пальцев и шарнирного соединения другой стороной с указанным главным ползуном.
Изобретение также относится к уравновешенному резонатору, включающему в себя несколько часовых резонаторов, имеющих одинаковую частоту, каждый из которых содержит согласующий палец, выполненный с возможностью передачи крутящего момента на соответствующий резонатор, причем каждый из указанных согласующих пальцев периодически следует по плоской, замкнутой траектории, и включающему в себя такой соединительный подвижный элемент, выполненный с возможностью взаимодействия с указанными согласующими пальцами, при этом указанный соединительный подвижный элемент образует только механическое соединение между подвижными элементами указанных резонаторов.
Изобретение также относится к часовому механизму, включающему в себя, установленный на главной платине посредством неподвижных элементов, по меньшей мере один из таких уравновешенных резонаторов.
Изобретение также относится к наручным часам, включающим в себя механизм такого типа.
Другие особенности и преимущества изобретения станут понятны из последующего подробного описания со ссылками на чертежи.
Краткое описание чертежей
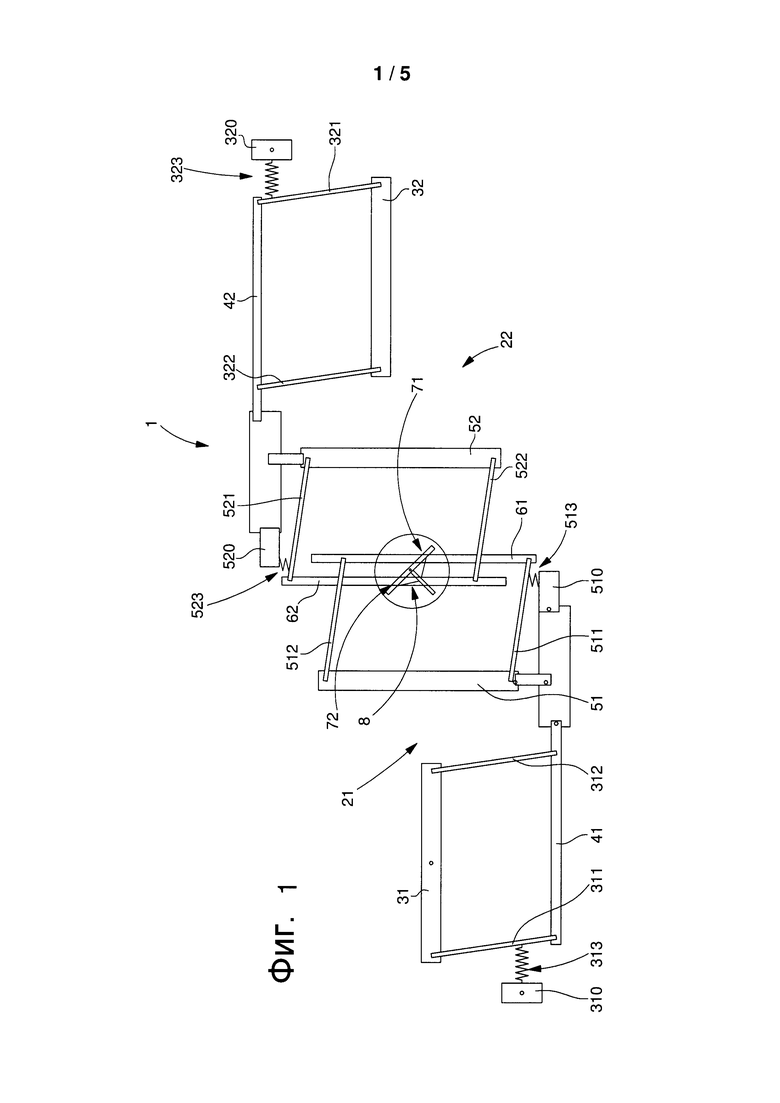
На фиг. 1 показан уравновешенный резонатор согласно изобретению, который включает в себя два часовых резонатора, первый резонатор и второй противоположный резонатор, каждый вращательно-криволинейного типа перемещения, образованные последовательным расположением двух генераторов колебаний, снабженных гибкими шарнирами, каждый из которых включает в себя один грузик, подвешенный относительно другого посредством нескольких гибких лент, причем эти два резонатора синхронизированы посредством соединительного подвижного элемента согласно изобретению, схематический вид спереди;
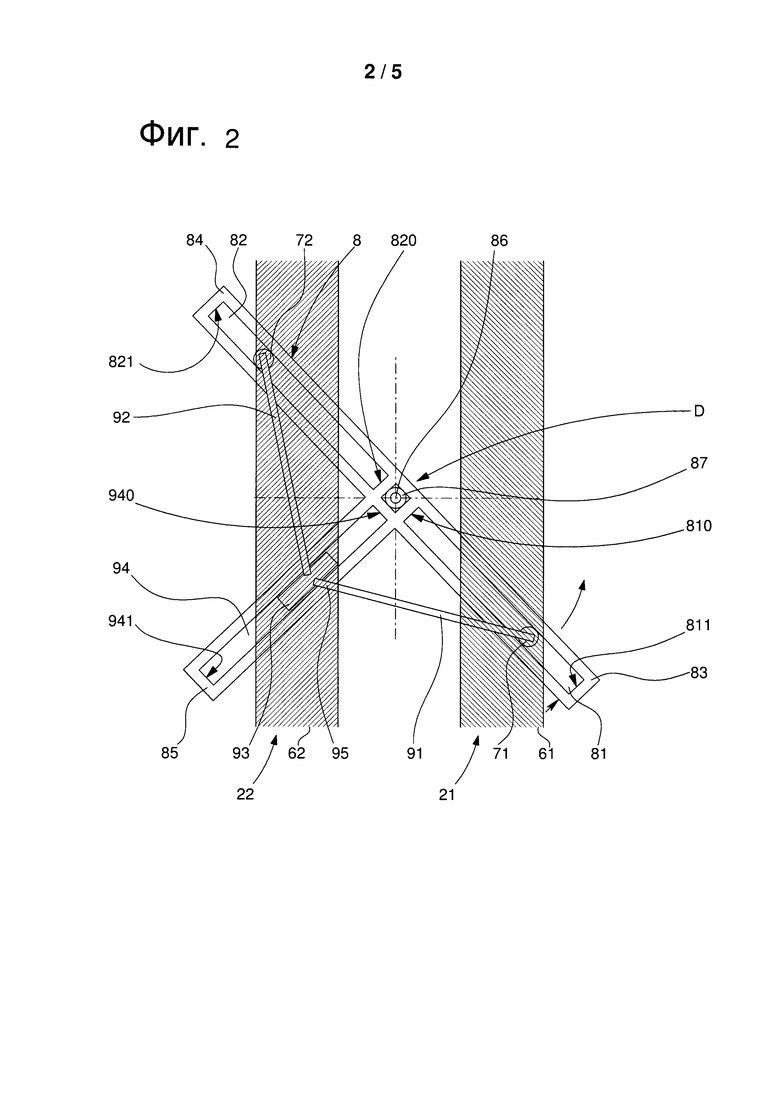
на фиг. 2 - соединительный подвижный элемент и его соединение с пальцами двух резонаторов, показанные на фиг. 1, подробный вид;
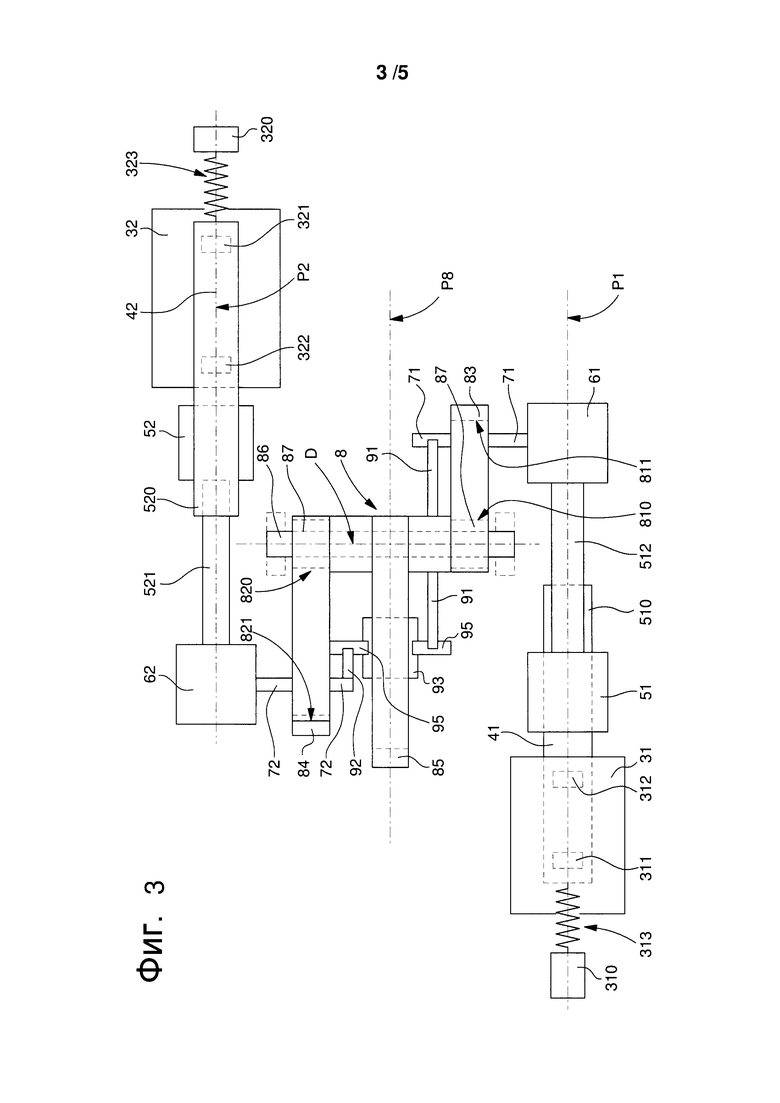
на фиг. 3 - уравновешенный резонатор на фиг. 1, схематичный вид сверху;
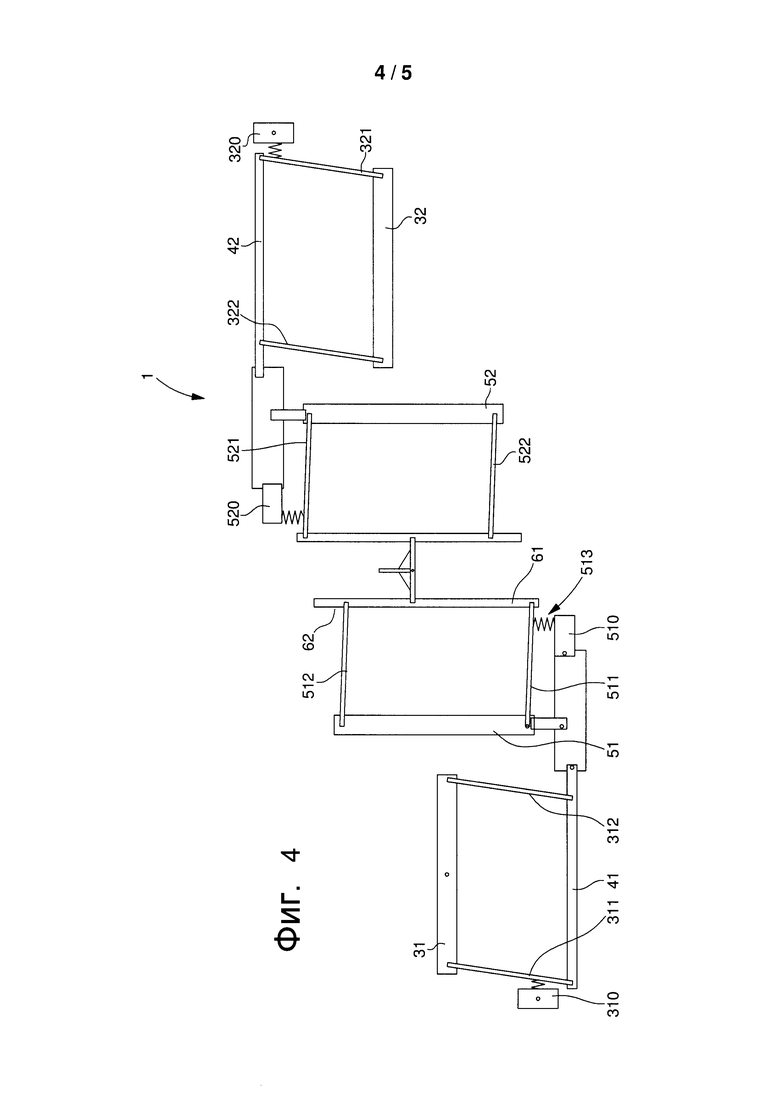
на фиг. 4 - уравновешенный резонатор на фиг. 1, в котором генераторы колебаний, образующие каждый из двух резонаторов, находятся в разных положениях, и соединительный подвижный элемент находится в другом угловом положении;
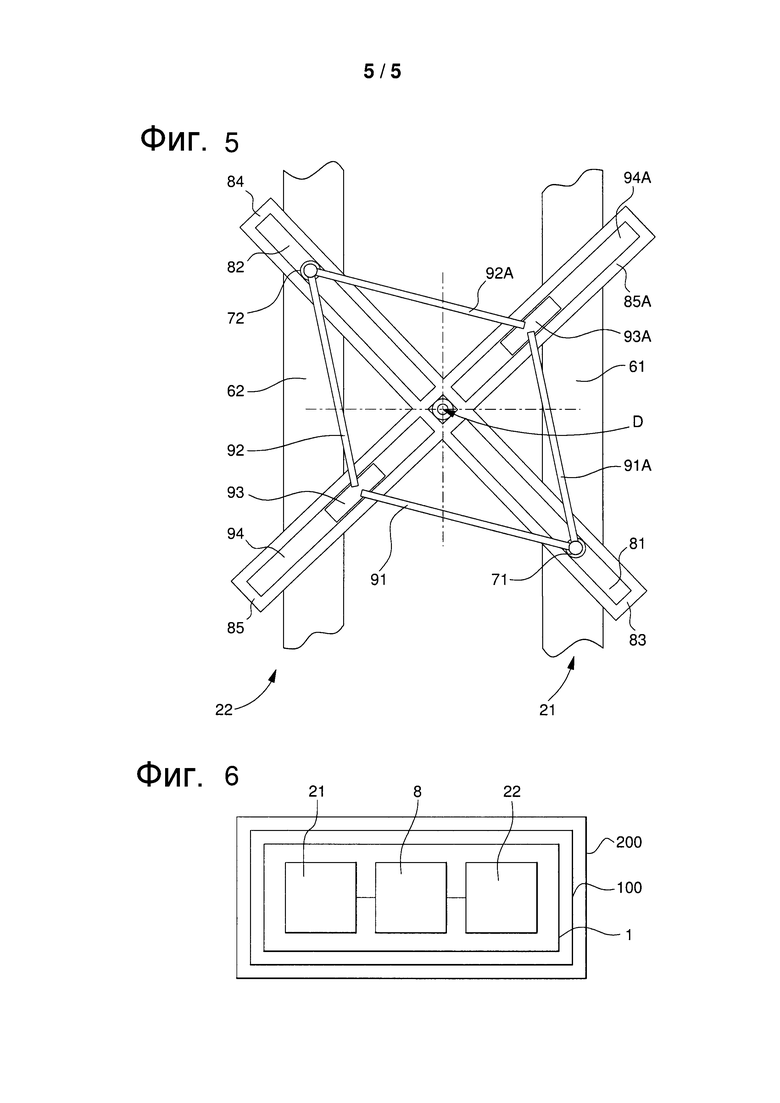
на фиг. 5 - один из вариантов по фиг. 2 с уравновешенным соединительным подвижным элементом для исключения любого дисбаланса;
на фиг. 6 - блок-схема наручных часов, с часовым механизмом, содержащим уравновешенный резонатор такого типа.
Осуществление изобретения
Изобретение относится к соединительному подвижному элементу 8 для синхронизации нескольких часовых резонаторов 21, 22, каждый из которых имеет одинаковую частоту и включает в себя согласующий палец 71, 72, выполненный с возможностью передачи крутящего момента на соответствующий резонатор 21, 22, каждый из указанных согласующих пальцев 71, 72 периодически следует по плоскости, замкнутой траектории.
Согласно изобретению этот соединительный подвижный элемент 8 включает в себя конструкцию 85, установленную с возможностью поворота вокруг оси D поворота, при этом конструкция 85 включает в себя средства для приема крутящего момента от часового механизма 100, такого как крутящий момент, создаваемый заводным барабаном или аналогичным устройством.
Этот соединительный подвижный элемент 8 включает в себя составляющие одно целое с конструкцией 85 средства для удержания пальцев 71, 72 на равном расстоянии от оси D.
Более конкретно, согласно одному из простых и неограничивающих вариантов осуществления такие удерживающие средства включают в себя составляющие одно целое с конструкцией 85 пазы 81, 82, каждый из которых проходит, по существу, радиально относительно оси D, в плоскости, расположенной перпендикулярно оси D, для приема каждого из таких пальцев 71, 72.
Эти пазы 81, 82 расположены попарно симметрично относительно главного, прямого паза 94, который проходит через ось D, в плоскости, перпендикулярной оси D, и внутри которого свободно скользит главный ползун 93. Этот главный ползун 93 взаимодействует с несколькими штангами 91, 92, каждая из которых шарнирно прикреплена одной стороной к одному из пальцев 71, 72, а другой стороной - к главному ползуну 93. В частности, указанные штанги 91, 92 имеют одинаковую длину, таким образом, чтобы каждая пара пазов 81, 82 была расположена симметрично относительно оси D для ограничения перемещения пальцев 71, 72 по симметричным траекториям относительно главного паза 94.
Согласно одному из частных вариантов осуществления соединительный подвижный элемент 8 выполнен с возможностью синхронизации двух таких часовых резонаторов 21, 22. В соответствии с частным вариантом осуществления два паза 81, 82 для соответствующих пальцев 71, 72 этих двух резонаторов 21, 22 являются прямыми и выровнены друг с другом и с осью D таким образом, чтобы пальцы 71, 72 были ограничены симметричными траекториями относительно оси D.
Согласно одному из частных вариантов осуществления соединительный подвижный элемент 8 выполнен с возможностью синхронизации двух таких идентичных часовых резонаторов 21, 22, установленных симметрично напротив друг друга.
Изобретение также относится к уравновешенному резонатору 1, включающему в себя множество таких часовых резонаторов 21, 22, синхронизированных посредством указанного соединительного подвижного элемента 8.
Независимо от того, каким образом закреплены неподвижные элементы резонаторов 21, 22, которые соединены с платиной мостами или подобными устройствами, этот соединительный подвижный элемент 8 образует только механическое соединение между подвижными элементами указанных резонаторов 21, 22.
Согласно одному из частных вариантов осуществления уравновешенный резонатор 1 включает в себя два таких часовых резонатора 21, 22.
Согласно одному из частных вариантов осуществления уравновешенный резонатор 1 включает в себя по меньшей мере один такой часовой резонатор 21, 22 вращательно-криволинейного типа перемещения, образованный посредством последовательного расположения двух генераторов колебаний, снабженных гибкими шарнирами, каждый из которых включает в себя один грузик, подвешенный относительно другого посредством нескольких гибких лент.
Согласно одному из частных вариантов осуществления уравновешенный резонатор 1 включает в себя два таких часовых резонатора 21, 22, каждый вращательно-криволинейного типа перемещения, образованных посредством последовательного расположения двух генераторов колебаний, снабженных гибкими шарнирами, каждый из которых включает в себя один грузик, подвешенный относительно другого посредством нескольких гибких лент.
Согласно одному из частных вариантов осуществления соединительный подвижный элемент 8 выполнен с возможностью синхронизации двух таких часовых резонаторов 21, 22, каждый из которых является резонатором вращательно-криволинейного типа перемещения, образованных посредством последовательного расположения двух генераторов колебаний, снабженных гибкими шарнирами, каждый из которых включает в себя один грузик, подвешенный относительно другого посредством нескольких идентичных, гибких лент, установленных симметрично напротив друг друга, как это показано на фиг. 1, на которой изображен частный и предпочтительный вариант осуществления изобретения, при этом уравновешенный резонатор 1 включает в себя два подобных резонатора вращательно-криволинейного типа перемещения, первый резонатор 21 и второй, противоположный резонатор 22.
Согласно такому частному и предпочтительному варианту осуществления первый резонатор 21 и второй, противоположный резонатор 22, расположены симметрично напротив друг друга.
Независимо от главной платины часового механизма или аналогичного устройства, на которые опираются его неподвижные элементы, соединительный подвижный элемент 8 уравновешенного резонатора 1 образует только механическое соединение между первым резонатором 21 и вторым, противоположным резонатором 22. Указанный соединительный подвижный элемент 8 включает в себя или образует колесную пару, например, анкерное колесо или подобное устройство, на которое крутящий момент, создаваемый, например, заводным барабаном, передается от часового механизма 100 через зубчатую передачу или аналогичное устройство.
Первый резонатор 21 включает в себя первый неподвижный грузик 31, который может быть жестко прикреплен к неподвижной конструкции, главной платине или к аналогичному устройству, либо может быть частью подобной главной платины.
Первый резонатор 21 также включает в себя первый подвижный грузик 41, который посредством первых гибких лент 311, 312 (или шаровых штанг, которые могут быть жесткими и возврат, по меньшей мере, одной из которых осуществляется пружиной) подвешен относительно первого неподвижного грузика 31.
Согласно одному из частных вариантов осуществления этот первый подвижный грузик 41 и/или, по меньшей мере, одна из первых гибких лент 311, 312 (или шаровых штанг, которые могут быть жесткими и возврат, по меньшей мере, одной из которых осуществляется пружиной) соединены с неподвижной конструкцией 310 посредством упругих возвратных средств 313, таких как пружина или аналогичное устройство.
Этот первый генератор колебаний колеблется, по существу, в первом линейном направлении Y. Первый подвижный грузик 41 такого первого генератора колебаний неразъемно соединен с возвратным грузиком 51, который выступает в качестве якоря для вторых гибких лент 511, 512 или шаровых штанг, возврат по меньшей мере одной из которых осуществляется пружиной, второго генератора колебаний, который колеблется, по существу, во втором линейном направлении X, перпендикулярном первому линейному направлению Y.
Этот второй генератор колебаний первого резонатора 21 также включает в себя второй подвижный грузик 61, который подвешен к возвратному грузику 51 посредством вторых гибких лент 511, 512 или шаровых штанг.
Указанный второй подвижный грузик 61 включает в себя первый палец 71, выполненный с возможностью взаимодействия с подвижным элементом 8, который будет более подробно описан далее.
Аналогичным и симметричным образом, второй противоположный резонатор 22 включает в себя первый неподвижный грузик 32, который может быть жестко прикреплен к неподвижной конструкции, главной платине или аналогичному устройству, либо может быть частью подобной главной платины.
Второй противоположный резонатор 22 также включает в себя первый противоположный подвижный грузик 42, который подвешен к первому противоположному неподвижному грузику 32 посредством первых противоположных гибких лент 321, 322 или шаровых штанг.
Согласно одному из частных вариантов осуществления указанный первый противоположный подвижный грузик 42 и/или, по меньшей мере, одна из первых противоположных гибких лент 321, 322 или шаровых штанг соединена посредством противоположных упругих возвратных средств 323, таких как пружина или аналогичное устройство, с противоположной неподвижной конструкцией 320, которая предпочтительно может быть неподвижной конструкций 310, либо с неподвижной конструкцией или платиной, к которой прикреплен первый неподвижный грузик 31 и/или первый противоположный неподвижный грузик 32.
Этот первый противоположный генератор колебаний колеблется, по существу, в том же самом, первом линейном направлении Y. Первый противоположный подвижный грузик 42 данного первого противоположного генератора колебаний неразъемно соединен с противоположным возвратным грузиком 42, который выступает в качестве якоря для вторых противоположных гибких лент 521, 522 или шаровых штанг второго противоположного генератора колебаний, который колеблется, по существу, в том же самом, втором линейном направлении X, перпендикулярном первому линейному направлению Y.
Этот второй противоположный генератор колебаний второго противоположного резонатора 22 также включает в себя второй противоположный подвижный грузик 62, который подвешен к противоположному возвратному грузику 52 посредством вторых противоположных гибких лент 521, 522 или шаровых штанг.
Второй противоположный подвижный грузик 62 включает в себя второй палец 72, выполненный с возможностью взаимодействия с соединительным подвижным элементом 8.
Согласно одному из частных вариантов осуществления, показанному на фигурах, колебания элементов первого и второго генераторов колебаний первого резонатора 21 происходят копланарно в первой плоскости Р1, колебания элементов первого и второго генераторов колебаний второго противоположного резонатора 22 происходят копланарно во второй плоскости Р2, которая параллельна первой плоскости Р1.
Согласно одному из частных вариантов осуществления первая плоскость Р1 и вторая плоскость Р2 совпадают.
Соединительный подвижный элемент 8 выполнен с возможностью поворота вокруг оси D поворота. Эта ось D поворота, в частности и предпочтительно, проходит перпендикулярно как первому линейному направлению Y, так и второму линейному направлению X. Согласно одному из конкретных вариантов осуществления соединительный подвижный элемент 8 включает в себя расположенную соосно оси D внешнюю обойму 87 шарикового подшипника, внутренняя обойма 86 которого неразъемно соединена со шпинделем, который может быть вставлен между подшипниками, закрепленными к главной платине или аналогичному устройству.
Соединительный подвижный элемент 8 включает в себя первый паз 81, проходящий, по существу, радиально относительно оси D, в котором первый палец 71 с минимальным люфтом или трением перемещается между двумя радиальными упорами конца перемещения: внутренним упором 810 и внешним упором 811, которые соответственно расположены вблизи и на расстоянии от оси D. Согласно одному из частных вариантов осуществления указанный первый паз 81 расположен в первом плече 83, которое проходит в плоскости, параллельной плоскости Р9 соединения, перпендикулярно оси D.
Согласно одному из частных вариантов осуществления первый палец 71 перемещается с минимальным люфтом в первом пазу 81.
Согласно другому частному варианту осуществления первый палец 71 перемещается в первом пазу 81 с трением, создающим, по существу, постоянное радиальное тормозное усилие.
Соединительный подвижный элемент 8 включает в себя второй паз 82, проходящий, по существу, радиально относительно оси D, в которой второй противоположный палец 72 с минимальным люфтом или трением перемещается между двумя радиальными упорами конца перемещения: внутренним упором 820 и внешним упором 821, которые соответственно расположены вблизи и на расстоянии от оси D. Согласно одному из частных вариантов осуществления этот второй паз 82 расположен во втором плече 84, которое проходит в плоскости, параллельной плоскости Р8 соединения, перпендикулярно оси D.
Согласно одному из частных вариантов осуществления второй противоположный палец 72 перемещается с минимальным люфтом во втором пазу 82.
Согласно другому частному варианту осуществления второй противоположный палец 72 перемещается во втором пазу 82 с трением, создающим, по существу, постоянное радиальное тормозное усилие.
Согласно одному из частных вариантов осуществления первый паз 81 является прямым.
Согласно одному из частных вариантов осуществления второй паз 82 является прямым.
Согласно одному из частных и предпочтительных вариантов осуществления первый паз 81 и второй паз 82 выровнены друг с другом и осью D. Главный паз 94 проходит ортогонально первому пазу 81 и второму пазу 82.
Перемещение первого пальца 71 в первом пазу 81 и перемещение второго противоположного пальца 72 во втором пазу 82 происходит не свободно, поскольку они соединены соединительными средствами, обеспечивающими симметричность их положения относительно оси D.
Согласно одному из частных и предпочтительных вариантов осуществления соединительный подвижный элемент 8 включает в себя третий, главный паз 94. Этот третий, главный паз 94 является прямым и проходит через ось D, совместно с которой он определяет, в проекции на плоскость Р8 соединения, ось симметрии первого паза 81 и второго паза 82.
Третий, главный паз 94 выступает в качестве опоры для ползуна 93, перемещающегося между двумя радиальными упорами 940 и 941 конца перемещения, находящимися соответственно вблизи и на расстоянии от оси D.
Согласно одному из частных вариантов осуществления этот третий, главный паз 94 расположен в третьем плече 85, которое проходит в плоскости, параллельной плоскости Р8 соединения, перпендикулярно оси D, и образует вышеуказанную конструкцию. Согласно одному из частных вариантов осуществления в плоскости третьего плеча 85 на него опирается зубчатое колесо, в частности, анкерное колесо, которое для упрощения восприятия не показано.
Этот главный ползун 93, непосредственно или опосредовано, поддерживает первую штангу 91, соединяющую его с первым пальцем 71, и вторую штангу 92, соединяющую его со вторым противоположным пальцем 72. Согласно одному из частных вариантов осуществления главный ползун поддерживает одну или две цапфы 95, в которые вставлены конец первой штанги 91 и второй штанги 92, расположенные противоположно соответствующим пальцам 71, 72. Данные цапфы 95, в зависимости от конструкции узла, могут быть выровнены или смещены. Согласно одному из частных, неограничивающих вариантов осуществления первая штанга 91 и вторая штанга 92 установлены поворотно своими концами на первый палец 71, второй противоположный палец 72 и соответствующие цапфы 95. Первая штанга 91 и втора штанга 92 имеют одинаковую длину.
Благодаря такой симметричной конструкции первая штанга 91 и вторая штанга 92 всегда симметричны относительно оси третьего, главного паза 94.
На фиг. 2 упрощенно показана Т-образная конструкция согласно варианту осуществления. На фиг. 5 показан вариант по фиг. 2 с крестовидным соединительным подвижным элементом, сбалансированным для исключения любого дисбаланса, который включает в себя четвертое плечо 85А, расположенное симметрично третьему плечу 85 относительно оси D и снабженное, точно таким же образом, пазом 94А, ползуном 93А и двумя штангами 91А и 92А, шарнирно присоединенными к пальцам 71 и 72.
Колесная пара 8 может иметь любую другую форму, в частности, круглую.
Предпочтительно, колесная пара статически и динамически сбалансирована.
При фактической эксплуатации первого резонатора 21 и второго противоположного резонатора 22 первый палец 71 и второй противоположный палец 72, каждый, перемещаются по замкнутой, по существу, эллиптической траектории, более предпочтительно - по круговой траектории. Для предотвращения выхода каждого из пальцев 71, 72 за пределы оси D, таким образом, чтобы траектория была приближена к круговой, и для упрощения, при необходимости, перезапуска, внутренние радиальные упоры 810 и 820 конца перемещения удалены от оси D с той же стороны, что и соответствующие внешние упоры 811 и 821.
Согласно одному из частных вариантов осуществления первый палец 71 неразъемно соединен с внутренней обоймой шарикового подшипника, внешняя обойма которого неразъемно соединена с первым ползуном, который скользит, без люфта или с трением, в первом пазу 81. Согласно одному из частных вариантов осуществления этот первый ползун скользит с трением в первом пазу 81.
Согласно одному из частных вариантов осуществления второй противоположный палец 72 неразъемно соединен с внутренней обоймой шарикового подшипника, внешняя обойма которого неразъемно соединена со вторым ползуном, который скользит, без люфта или с трением, во втором пазу 82. Согласно одному из частных вариантов осуществления этот второй ползун скользит с трением во втором пазу 82.
Согласно одному из частных вариантов осуществления каждая цапфа 95 неразъемно соединена с внутренней обоймой шарикового подшипника, внешняя обойма которого неразъемно соединена с главным ползуном 93. Согласно одному из частных вариантов осуществления данный главный ползун 93 скользит в третьем пазу 94 с трением.
Симметричная конструкция согласно изобретению решает проблему активного противодействия в точке крепления к главной платине, присущую резонаторам вращательно-криволинейного типа перемещения, образованных посредством последовательного расположения двух генераторов колебаний, снабженных гибкими шарнирами, каждый из которых включает в себя один грузик, подвешенный относительно другого при помощи нескольких гибких лент и установленных отдельно.
Преимущество соединительного подвижного элемента 8 заключается в том, что он обеспечивает идеальную синхронизацию первого резонатора 21 со вторым противоположным резонатором 22 и управляемое трение. Использование шариковых подшипников или аналогичных устройств в шарнирах позволяет свести трение к минимуму, а наличие трения на ползунах позволяет управлять формой эллиптической траектории первого пальца 71 и второго противоположного пальца 72.
Возвратные усилия как у первого резонатора 21, так и у второго противоположного резонатора 22 не в полной мере пропорциональны движениям, поскольку гибкие шарниры, используемые в подобных резонаторах, очень короткие, что приводит к нелинейности усилия пружины в зависимости от движения, в результате чего возникают погрешности изохронизма. Для того чтобы сделать систему изохронной, соответствующие пазы 81, 82, которые выступают в качестве направляющих для соответствующих пальцев 71, 72, расположены определенным образом. Согласно одному из частных вариантов осуществления каждый из пазов 81, 82 имеет форму, создающую радиальное усилие, которое корректирует пружинное постоянное отклонение гибких направляющих лент. В зависимости от формы паза это усилие может быть направлено в сторону центра или наружу. Паз согласно первому варианту осуществления является полностью изогнутым. Согласно одному из предпочтительных вариантов осуществления вогнутость этого паза 71, 72 постепенно уменьшается по мере удаления от оси D. Согласно второму варианту осуществления паз 71, 72 включает в себя внутреннюю часть, которая проходит радиально относительно оси D и по касательной ко второй, изогнутой части постоянной или уменьшающейся вогнутости по мере удаления от оси D, для компенсации погрешностей изохронизма. Согласно другому варианту, паз 71, 72 является прямым, а не радиальным.
Изобретение также относится к подобному резонатору 1, снабженному таким соединительным подвижным элементом 8, часовому механизму, снабженному таким резонатором и включающему в себя главную платину, на которой установлены неподвижные элементы резонатора 1, и к наручным часам 200, снабженным таким часовым механизмом 100.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДДЕРЖАНИЯ РАБОТЫ И РЕГУЛИРОВАНИЯ ЧАСОВОГО РЕЗОНАТОРА | 2015 |
|
RU2663089C1 |
| Изохронный параксиальный часовой резонатор | 2015 |
|
RU2695518C2 |
| КАМЕРТОННЫЙ ГЕНЕРАТОР КОЛЕБАНИЙ ДЛЯ ЧАСОВ | 2015 |
|
RU2629167C2 |
| ПРИВОДНОЙ МЕХАНИЗМ ДЛЯ ТРЕХПОЗИЦИОННОГО ПЕРЕКЛЮЧАТЕЛЯ | 1993 |
|
RU2126565C1 |
| МЕХАНИЧЕСКИЙ ЧАСОВОЙ МЕХАНИЗМ С РЕЗОНАТОРОМ, ИМЕЮЩИМ ДВЕ СТЕПЕНИ СВОБОДЫ, И С ПОДДЕРЖИВАЮЩИМ МЕХАНИЗМОМ, ИСПОЛЬЗУЮЩИМ БЕГУНОК, ПЕРЕМЕЩАЮЩИЙСЯ ПО ДОРОЖКЕ | 2017 |
|
RU2749944C2 |
| Механические часы с изохронным и нечувствительным к положению поворотным резонатором | 2017 |
|
RU2743150C2 |
| ЧАСОВОЙ РЕЗОНАНСНЫЙ МЕХАНИЗМ | 2017 |
|
RU2718360C1 |
| ВЕДУЩИЙ ШКИВ ДЛЯ БЕССТУПЕНЧАТО-РЕГУЛИРУЕМОЙ ПЕРЕДАЧИ | 2002 |
|
RU2251639C1 |
| ЧАСОВОЙ КОЛЕБАТЕЛЬНЫЙ МЕХАНИЗМ | 2016 |
|
RU2692817C2 |
| ПНЕВМОУСИЛИТЕЛЬ ДЛЯ ТОРМОЗНОЙ СИСТЕМЫ С ИЗБИРАТЕЛЬНЫМ И РЕГУЛИРУЕМЫМ УСИЛИЕМ ТОРМОЖЕНИЯ | 2000 |
|
RU2240242C2 |
Соединительный подвижный элемент (8) для синхронизации двух резонаторов (21, 22), каждый из которых включает в себя согласующий палец (71, 72), периодически следующий по плоской замкнутой траектории, включает в себя пазы под пальцы (71, 72), равноудаленные от оси (D) на конструкции (85), поворачивающейся вокруг оси (D) в результате передаваемого ей крутящего момента, при этом пазы являются копланарными пазами, расположенными радиально относительно оси (D) для приема пальцев (71, 72) и попарно симметрично относительно главного, прямого, паза (94), проходящего через ось (D), в плоскости, перпендикулярной оси (D) и в которой скользит главный ползун (93), взаимодействующий с несколькими штангами (91, 92), каждая из которых шарнирно прикреплена одной стороной к одному из пальцев (71, 72), а другой стороной шарнирно прикреплена к главному ползуну (93). 4 н. и 13 з.п. ф-лы, 6 ил.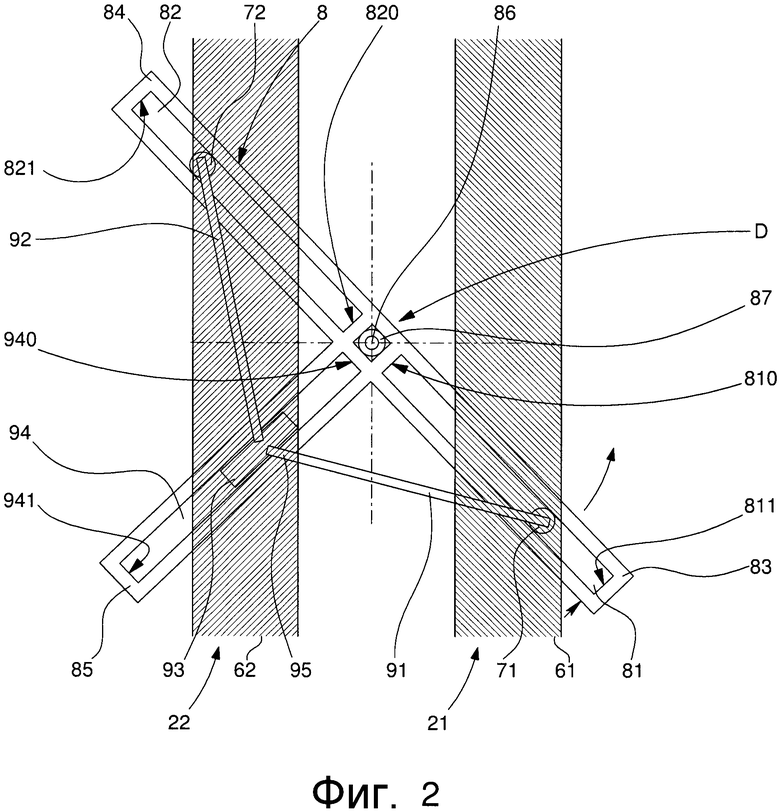
1. Соединительный подвижный элемент (8) для синхронизации нескольких часовых резонаторов (21, 22), которые имеют одинаковую частоту и каждый из которых включает в себя согласующий палец (71; 72), выполненный с возможностью передачи крутящего момента на соответствующий резонатор (21; 22), при этом каждый из указанных согласующих пальцев (71; 72) периодически следует по плоской замкнутой траектории, причем указанный соединительный подвижный элемент (8) включает в себя составляющие одно целое с конструкцией (85), выполненной с возможностью поворота вокруг оси (D) поворота и включающей в себя средства для приема крутящего момента, средства для удержания указанных пальцев (71; 72) на равном расстоянии от указанной оси (D), отличающийся тем, что указанные удерживающие средства указанного соединительного подвижного элемента (8) включают в себя несколько пазов (81, 82), составляющих одно целое с указанной конструкцией (85), каждый из которых проходит, по существу, радиально относительно указанной оси (D), в плоскости, перпендикулярной указанной оси (D), для приема каждого из указанных пальцев (71; 72), указанные пазы (81; 82) расположены попарно симметрично относительно главного, прямого, паза (94), проходящего через указанную ось (D), в плоскости, перпендикулярной указанной оси (D); внутри указанного главного паза (94) расположен главный ползун (93), выполненный с возможностью свободного скольжения и взаимодействующий с несколькими штангами (91, 92), каждая из которых приспособлена для шарнирного соединения одной стороной с одним из указанных пальцев (71, 72) и шарнирного соединения другой стороной с указанным главным ползуном (93).
2. Элемент (8) по п. 1, отличающийся тем, что указанные штанги (91, 92) имеют одинаковую длину для каждой пары указанных пазов (81, 82), расположенных симметрично относительно оси (D), таким образом, чтобы ограничивать перемещение указанных пальцев (71, 72) по траекториям, расположенным симметрично относительно указанного главного паза (94).
3. Элемент (8) по п. 1, отличающийся тем, что указанный соединительный подвижный элемент (8) выполнен с возможностью синхронизации двух указанных часовых резонаторов (21, 22) и включает в себя два паза (81, 82) под указанные пальцы (71, 72) указанных двух резонаторов (21, 22), которые являются прямыми и выровнены друг с другом и с осью (D) таким образом, чтобы ограничивать перемещение указанных пальцев (71, 72) по траекториям, расположенным симметрично относительно указанной оси (D).
4. Элемент (8) по п. 1, отличающийся тем, что указанный соединительный подвижный элемент (8) содержит первый паз (81), проходящий, по существу, радиально относительно указанной оси (D) и включающий в себя два радиальных, внутренний (810) и внешний (811), упора конца перемещения, ограничивающих радиальное перемещение указанного пальца (71), указанный первый паз (81) расположен в первом плече (83), которое проходит в плоскости, параллельной плоскости (Р8) соединения, перпендикулярно указанной оси (D), причем указанный соединительный подвижный элемент (8) содержит второй паз (82), проходящий, по существу, радиально относительно указанной оси (D) и включающий в себя два, внутренний (820) и внешний (821), упора конца перемещения, ограничивающих радиальное перемещение указанного пальца (72), указанный паз (82) расположен во втором плече (84), которое проходит в плоскости, параллельной плоскости (Р8) соединения.
5. Элемент (8) по п. 4, отличающийся тем, что указанный первый паз (81) и указанный второй паз (82) являются прямыми и выровнены друг с другом и осью (D), а указанный главный паз (94) проходит ортогонально указанному первому пазу (81) и указанному второму пазу (82).
6. Элемент (8) по п. 4, отличающийся тем, что для предотвращения выхода каждого из указанных пальцев (71, 72) за пределы указанной оси (D) указанные внутренние радиальные упоры (810, 820) конца перемещения удалены от указанной оси (D) с той же стороны, что и соответствующие внешние упоры (811, 821).
7. Элемент (8) по п. 4, отличающийся тем, что указанный соединительный подвижный элемент (8) включает в себя первый ползун, выполненный с возможностью скольжения, без люфта или с трением, в указанном первом пазу (81), и в котором находится внешняя обойма шарикового подшипника, внутренняя обойма которого предназначена для приема указанного пальца (71), и/или указанный соединительный подвижный элемент (8) включает в себя второй ползун, выполненный с возможностью скольжения, без люфта или с трением, в указанном втором пазу (82), и в котором находится внешняя обойма шарикового подшипника, внутренняя обойма которого предназначена для приема указанного пальца (72).
8. Элемент (8) по п. 1, отличающийся тем, что указанный соединительный подвижный элемент (8) включает в себя центрированную на указанной оси (D) внешнюю обойму (87) шарикового подшипника, который включает в себя внутреннюю обойму (86), неразъемно соединенную со шпинделем, выполненным с возможностью установки между подшипниками, прикрепленными к главной платине.
9. Элемент (8) по п. 1, отличающийся тем, что указанный соединительный подвижный элемент (8) включает в себя или образует анкерное колесо, на которое передается крутящий момент, создаваемый часовым механизмом (100).
10. Уравновешенный резонатор (1), включающий в себя несколько часовых резонаторов (21, 22), имеющих одинаковую частоту, каждый из которых содержит согласующий палец (71, 72), выполненный с возможностью передачи крутящего момента на соответствующий резонатор (21, 22), причем каждый из указанных согласующих пальцев (71, 72) периодически следует по плоской замкнутой траектории, и включающий в себя соединительный подвижный элемент (8) по п. 1, выполненный с возможностью взаимодействия с указанными согласующими пальцами (71, 72), отличающийся тем, что указанный соединительный подвижный элемент (8) образует только механическое соединение между подвижными элементами указанных резонаторов (21, 22).
11. Резонатор (1) по п. 10, отличающийся тем, что указанный уравновешенный резонатор (1) включает в себя два указанных часовых резонатора (21, 22).
12. Резонатор (1) по п. 11, отличающийся тем, что указанный уравновешенный резонатор (1) включает в себя по меньшей мере один часовой резонатор (21, 22) вращательно-криволинейного типа перемещения, образованный посредством последовательного расположения двух генераторов колебаний, снабженных гибкими шарнирами, каждый из которых включает в себя один грузик, подвешенный относительно другого посредством нескольких гибких лент или шаровых опор, возврат по меньшей мере одной из которых осуществляется пружиной.
13. Резонатор (1) по п. 12, отличающийся тем, что указанный уравновешенный резонатор (1) включает в себя два указанных часовых резонатора, первый резонатор (21) и второй противоположный резонатор (22), каждый из которых является резонатором вращательно-криволинейного типа перемещения, образованных посредством последовательного расположения двух генераторов колебаний, снабженных гибкими шарнирами, каждый из которых включает в себя один грузик, подвешенный относительно другого посредством нескольких гибких лент.
14. Резонатор (1) по п. 13, отличающийся тем, что указанный первый часовой резонатор (21) и указанный второй противоположный резонатор (22) идентичны и расположены симметрично, противоположно друг другу.
15. Резонатор (1) по п. 10, отличающийся тем, что указанный соединительный подвижный элемент (8) включает в себя указанный первый паз (81), проходящий, по существу, радиально относительно указанной оси (D), в котором указанный первый палец (71) первого резонатора (21) перемещается с минимальным люфтом или трением между двумя, внутренним (810) и внешним (811), радиальными упорами конца перемещения, а также включает в себя указанный второй паз (82), проходящий, по существу, радиально относительно указанной оси (D), в котором указанный второй противоположный палец (72) указанного второго резонатора (22) перемещается с минимальным люфтом или трением между двумя, внутренним (820) и внешним (821). радиальными упорами конца перемещения.
16. Часовой механизм (100), включающий в себя установленный на главной платине посредством неподвижных элементов по меньшей мере один уравновешенный резонатор (1) по п. 10.
17. Наручные часы (200), включающие в себя часовой механизм (100) по п. 16.
| WO 2006067597 A3, 29.06.2006 | |||
| Система автоматического регулирования теплового режима шаровой вентилируемой мельницы | 1984 |
|
SU1232285A1 |
| RU 2012139632 A, 20.03.2014 | |||
| US 2013070569 A1, 21.03.2013 | |||
| RU 2012139634 A, 20.03.2014. | |||

