ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к лебедке, содержащей один или более блоков, предотвращающих переподъем, т.е. чрезмерный подъем, устройство для предотвращения вращения груза, плату питания, содержащую в основном кольцевые электрические контакты, блок контроля натяжения троса, и систему, содержащую вышеупомянутую лебедку и груз, прикрепленный к лебедке, батарею груза, заряжаемую при помощи лебедки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Устройство лебедки описано, например, в патенте JP 2007-284174 А. Лебедку применяют для наматывания и разматывания кабеля. В данном описании цилиндрический и прозрачный кожух, проницаемый для света, встроен в направляющую вспомогательного кабеля, поддерживаемую на направляющем узле кабеля. Светодиод для освещения вспомогательного кабеля со свето- и фотодиодом для получения отраженного света предусмотрен на внешней периферии прозрачного кожуха. Черный маркер для поглощения света прикреплен на внешней периферии вспомогательного кабеля с постоянным зазором в продольном направлении кабеля. Устройство для обработки сигнала предусмотрено для обнаружения с помощью фотодиода того, что происходит прерывание отраженного света маркером от вспомогательного кабеля, когда вспомогательный кабель проходит через направляющую вспомогательного кабеля и вычисления объема операций, с помощью лебедки, касающихся вспомогательного кабеля, основанных на определенных маркером интервалах.
Другой известный уровень техники определен, например, в патенте US 7153001 В2, в котором описана система потолочного освещения с автоматическим подъемом, в которой ширина левого и правого вращающихся барабанов имеет такую же ширину, как у плоского кабеля, и плоский кабель намотан стабильно и вертикально на внешней поверхности сердечника намотки в левом и правом вращающемся барабане при намотке с помощью двигателя, тем самым предотвращено перекручивание. В системе потолочного освещения с автоматическим подъемом лампу можно включать и выключать в любом положении, и плоский кабель, подающий электропитание к лампе, не подвергается перекручиванию, и можно поддерживать равновесие лампы при опускании и подъеме лампы.
Однако существует необходимость в дальнейших усовершенствованиях лебедок.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Лебедки согласно настоящему изобретению описаны в независимых пунктах формулы изобретения. Предпочтительные варианты выполнения лебедок описаны в зависимых пунктах формулы изобретения.
Описана лебедка, которая состоит из блока, предотвращающего переподъем (ПП), причем блок ПП содержит: триггер ПП, для предотвращения дальнейшего подъема груза с помощью лебедки; активатор триггера ПП (АТПП), который совершает перемещение между первым положением АТПП и вторым положением АТПП относительно триггера ПП; при этом триггер ПП находится в деактивизированном состоянии, в тот момент, когда АТПП находится в первом положении АТПП, при этом триггер ПП находится в активизированном состоянии для предотвращения дальнейшего подъема груза с помощью лебедки в тот момент, когда АТПП находится во втором положении АТПП; при этом АТПП контактирует с грузом таким образом, чтобы АТПП мог совершать перемещение от первого положения АТПП ко второму положению АТПП при подъеме груза с помощью лебедки.
В некоторых примерах осуществления изобретения, при осуществлении подъема груза с помощью лебедки, груз (то есть объект, прикрепленный к лебедке, позволяющей осуществлять подъем и/или опускание объекта) может в результате войти в контакт с АТПП. При дальнейшем подъеме груза может быть осуществлено проталкивание АТПП посредством груза из первого положения АТПП во второе положение АТПП. Таким образом, груз, проталкивая АТПП во второе положение АТПП, в результате может установить триггер ПП в активизированное состояние. Это может позволить предотвратить дальнейший подъем груза с помощью лебедки, предотвращая тем самым переподъем, который иначе может привести, например, к разрыву троса.
В некоторых примерах осуществления изобретения триггер ПП может представлять собой переключатель, который включается с помощью АТПП при перемещении из первого положения АТПП во второе положение АТПП. Дополнительно или в качестве альтернативы триггер ПП может быть частью электрической схемы, при этом может быть осуществлено замыкание электрической схемы, когда АТПП находится в контакте с триггером ПП. Альтернативный вариант выполнения триггера ПП будет хорошо понятен специалисту в данной области техники.
В некоторых вариантах выполнения АТПП может содержать штырек, который может быть применен для активизирования триггера ПП в тот момент, когда АТПП осуществляет передвижение из первого положения АТПП во второе положение АТПП. Таким образом, штырек может быть приведен в прямой контакт c грузом, который необходимо поднимать с помощью лебедки. В альтернативном варианте штырек может быть присоединен к первому корпусу АТПП, при этом первый корпус может, например, обеспечить большую площадь для контакта с грузом, который необходимо поднимать с помощью лебедки. В данном примере осуществления изобретения штырек совершает перемещение в результате того, что груз осуществляет проталкивание первого корпуса АТПП так, чтобы триггер ПП мог быть активизирован, когда АТПП достигает второго положения АТПП.
В другом примере выполнения лебедки блок ПП содержит также один или более упругих элементов (то есть, упругие элементы блока ПП), которые выполнены таким образом, чтобы осуществлять смещение АТПП по направлению к первому положению АТПП. В некоторых вариантах осуществления один или более упругих элементов содержат одну или более нажимных пружин. Таким образом, один или более упругих элементов позволяют блоку ПП, и в частности АТПП блока ПП быть в тесном контакте с грузом по меньшей мере в некоторых положениях АТПП. Это может в дальнейшем повысить устойчивость в отношении любого выравнивания между блоком ПП и грузом, в частности, когда груз поднимают или опускают с помощью лебедки.
Один или более упругих элементов могут также обеспечить амортизацию в такой мере, чтобы не произошло повреждение груза при осуществлении подъема выше определенного уровня.
В другом варианте осуществления лебедка выполнена для автоматического опускания груза после активизирования триггера ПП. Это может быть особенно предпочтительно, так как это может предотвратить как повреждение груза при подъеме за пределами определенного уровня, так и натяжение троса лебедки, превышающее определенное заданное пороговое значение, когда лебедка должна осуществлять наматывание троса, а груз не может быть поднят (или не подлежит подъему). Автоматическое опускание груза после активизирования триггера ПП, таким образом, может предотвратить любые повреждения груза и/или троса.
Описана также лебедка, в частности, согласно одному или более вышеупомянутых вариантов осуществления изобретения, которая содержит устройство, предотвращающее вращение груза, которое выполнено для того, чтобы отцеплять груз, который должен быть поднят с помощью лебедки, от троса лебедки. В некоторых вариантах осуществления устройство, предотвращающее вращение груза, может содержать два или более шарикоподшипников. Вышеупомянутые один или более шарикоподшипников могут быть расположены между запорным блоком, который может быть применен для прикрепления груза, и поддерживающим элементом, таким образом, чтобы предупредить соскальзывание одного или более шарикоподшипников с устройства, предотвращающего вращение груза. Устройство, предотвращающее вращение груза, путем отцепления груза от троса, позволяет удерживать груз в основном в определенном угловом положении при подъеме или опускании с помощью лебедки независимо от того, приводит ли наматывание или разматывание троса для подъема или опускания груза, соответственно, к закручиванию троса.
Описана также лебедка, в частности, как изложено в вышеупомянутом одном или более вариантах осуществления изобретения, которая содержит кольцевой корпус, содержащий плату питания, при этом плата питания содержит практически кольцевые электрические контакты, подсоединяемые к данному грузу. Это может иметь особенное преимущество в случаях, когда груз содержит батарею, которая может быть заряжена посредством лебедки, то есть посредством электрической схемы, содержащейся в лебедке или подсоединенной к лебедке. Причем, как изложено выше, трос может быть подвергнут перекручиванию при наматывании или разматывании с помощью лебедки. Таким образом, наличие платы питания, которая содержит в основном кольцевые электрические контакты, позволяет установить электрический контакт между лебедкой и грузом независимо от относительного углового положения груза по отношению к лебедке относительно оси, определяемой лебедкой, то есть направления троса. Следует иметь в виду, что даже в том случае, если лебедка содержит устройство, предотвращающее вращение груза, для отцепления груза от троса, груз, тем не менее, по меньшей мере, незначительно, может осуществлять вращение вокруг вышеупомянутой оси, когда происходит наматывание или разматывание троса. Это может быть следствием определенного трения между грузом и держателем груза лебедки (независимо от их расцепления), что может активизировать передачу (потенциально минимальную) крутящего момента от свитого троса к грузу. Наличие платы питания, которая содержит в основном кольцевые электрические контакты, таким образом, обеспечивает электрический контакт с электрическими контактами груза также в варианте выполнения лебедки, когда применено устройство, предотвращающее вращение груза.
Плата питания может быть выполнена как одно целое с печатной платой, как изложено в данном описании изобретения.
В другом варианте выполнения лебедки один или более упругих элементов выполнены для стабилизирования кольцевого корпуса после подъема или опускания груза с помощью лебедки. В некоторых вариантах осуществления один упругий элемент может быть расположен по обе стороны кольцевого корпуса. В некоторых других вариантах осуществления применяют две пары упругих элементов, где в каждой паре один упругий элемент расположен на кольцевом корпусе в противоположном направлении от второго упругого элемента по отношению к оси, определенной тросом лебедки. В результате этого может быть достигнута особенно устойчивая конструкция.
В некоторых вариантах осуществления лебедка содержит также зарядный блок, выполненный для зарядки батареи груза посредством кольцевых электрических контактов. Таким образом, зарядный блок может быть подсоединен к практически кольцевым электрическим контактам посредством питающего провода. Зарядный блок можно контролировать с помощью микроконтроллера, который может быть применен для определения уровня зарядки батареи груза.
Описана также лебедка, в частности, как изложено согласно одному из вышеупомянутых вариантов осуществления, которая содержит блок контроля натяжения троса (КНТ) для определения натяжения, которому подвергают трос лебедки, при этом блок КНТ содержит триггер КНТ для активизирования предотвращения дальнейшего наматывания и разматывания троса и активатор триггера КНТ (АТКНТ), который совершает перемещение между первым положением АТКНТ и вторым положением АТКНТ относительно триггера КНТ; при этом триггер КНТ находится в деактивизированном состоянии, когда АТКНТ находится в первом положении АТКНТ, при этом триггер КНТ находится в активизированном состоянии для того, чтобы триггер предотвращал дальнейшее наматывание и разматывание троса, когда АТКНТ находится во втором положении АТКНТ; при этом АТКНТ выполнен с возможностью перемещения во второе положение АТКНТ, когда натяжение, которому подвергают трос, становится ниже предварительно заданного порогового натяжения.
В некоторых примерах осуществления изобретения триггер КНТ содержит переключатель, который может быть активизирован при помощи штырька активизирования АТКНТ.
В целом, лебедка согласно некоторым примерам осуществления изобретения, как описано в данном документе, может быть расположена таким образом, что направляющий ролик троса совершает перемещение между положениями под влиянием натяжения, которому подвергают трос. Если натяжение, которому подвергают трос, становится ниже заданного порогового значения, АТКНТ, который подсоединен к направляющему ролику троса, совершает перемещение ко второму положению АТКНТ для того, чтобы привести триггер КНТ в активизированное состояние.
Варианты выполнения лебедки, таким образом, могут обеспечить, например, предотвращение выпадения троса из тросового барабана во время транспортировки лебедки или во время какой-либо другой ситуации, при которой нет груза или к лебедке присоединен небольшой груз, и/или питание лебедки отключено. Трос может быть автоматически закреплен, как будет также описано ниже.
Кроме того, оснащение лебедки блоком КНТ позволяет предотвратить начало работы лебедки без груза, прикрепленного к лебедке, тем самым предотвращая выпадение троса из барабана.
Оснащение лебедки блоком КНТ позволяет также осуществить остановку работы лебедки (например, наматывание или разматывание троса), когда груз касается земли или другого объекта во время перемещения.
В некоторых примерах выполнения лебедки блок КНТ содержит также упругий элемент КНТ, выполненный для смещения АТКНТ ко второму положению АТКНТ. В некоторых вариантах выполнения упругий элемент КНТ может быть нажимной пружиной. Если лебедка не имеет груза или имеет груз, меньший определенного порогового значения, применение упругого элемента КНТ может позволить активизировать триггер КНТ для того, чтобы, например, прекратить наматывание или разматывание троса, чтобы предотвратить выпадение троса из тросового барабана, помимо прочих преимуществ, описанных выше.
В некоторых примерах осуществления изобретения лебедка содержит также направляющий ролик троса для направления троса лебедки и стопорный элемент для зажимания троса между направляющим роликом троса и стопорным элементом, когда АТКНТ находится во втором положении АТКНТ. Это может быть особенно предпочтительным в том смысле, что может быть предотвращено выпадение троса из тросового барабана, если натяжение, которому подвергают трос, становится ниже заданного порогового значения.
В некоторых других вариантах выполнения лебедки стопорный элемент совершает перемещение между различными положениями стопорного элемента относительно положения направляющего ролика троса в зависимости от диаметра троса. Это позволяет регулировать зазор между стопорным элементом и направляющим роликом троса в зависимости от диаметра (или толщины в направлении от направляющего ролика троса) троса.
В некоторых примерах стопорным элементом может быть винт с плоским концом, что может быть особенно предпочтительным, поскольку это позволяет легче регулировать положение винта с плоским концом относительно положения направляющего ролика троса (для особого натяжения, которому подвергают трос).
В некоторых других примерах выполнения лебедки триггер КНТ установлен на печатной плате, включенной в опорную раму для поддержки блока КНТ. Это позволяет обеспечить особенно компактное выполнение лебедки, что может быть особенно необходимо для относительно маленьких лебедок. Вся электронная аппаратура управления, таким образом, может быть расположена на печатной плате, включая любые триггеры и/или переключатели, описанные в данном изобретении.
В некоторых других вариантах выполнения лебедки блок КНТ содержит также блок обнаружения износа троса, выполненный с целью определения износа троса с помощью электрического контакта, установленного между стопорным элементом и тросом, когда триггер КНТ находится в деактивизированном состоянии. Это может быть особенно предпочтительным, так как позволяет, например, заменить или починить трос, если он находится в определенном состоянии износа. Это решение может иметь преимущество также и потому, что иначе груз может упасть, если трос поврежден.
В некоторых примерах осуществления изобретения блок определения износа троса выполнен также так, чтобы предотвратить наматывание и разматывание троса и/или подать сигнал тревоги при обнаружении электрического контакта, который установлен между стопорным элементом и тросом, когда триггер КНТ находится в деактивизированном состоянии. Сигнал тревоги может представлять собой, например, мигание визуальных индикаторов, таких как светодиоды, или посылку данных на центральный контроллер. В частности предотвращение наматывания и разматывания троса лебедкой может позволить также предотвратить повреждение троса, следовательно, предотвратить падение и повреждение груза.
Описана также система, содержащая лебедку согласно любому из вышеупомянутых вариантов осуществления, в которой применяют кольцевидный корпус, содержащий плату питания, причем лебедка содержит держатель груза, при этом система также содержит груз, прикрепленный к держателю груза. Груз содержит электрические контакты груза и зарядную батарею. Система выполнена таким образом, чтобы, когда груз контактирует с блоком ПП, была возможность заряжать батарею груза с помощью электрических контактов, приведенных в контакт с практически кольцевыми электрическими контактами платы питания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Данные и другие аспекты изобретения будут описаны также только в качестве примера со ссылкой на прилагаемые чертежи, при этом сходные номера позиций относятся к сходным частям.
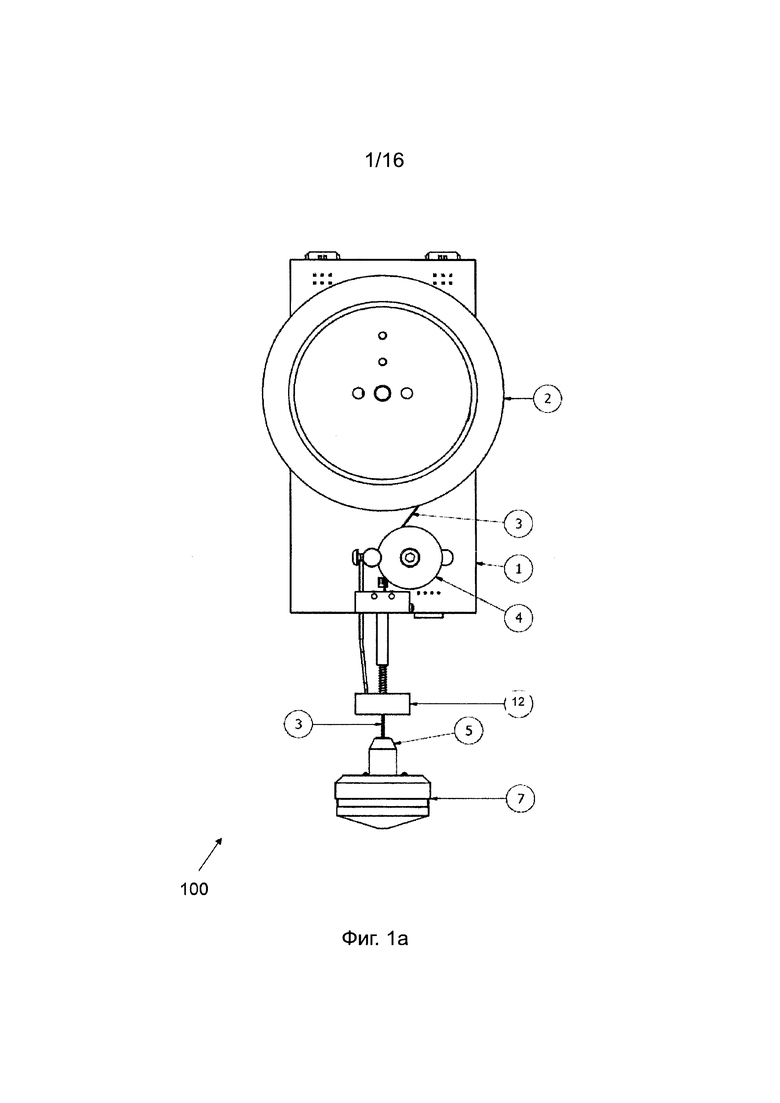
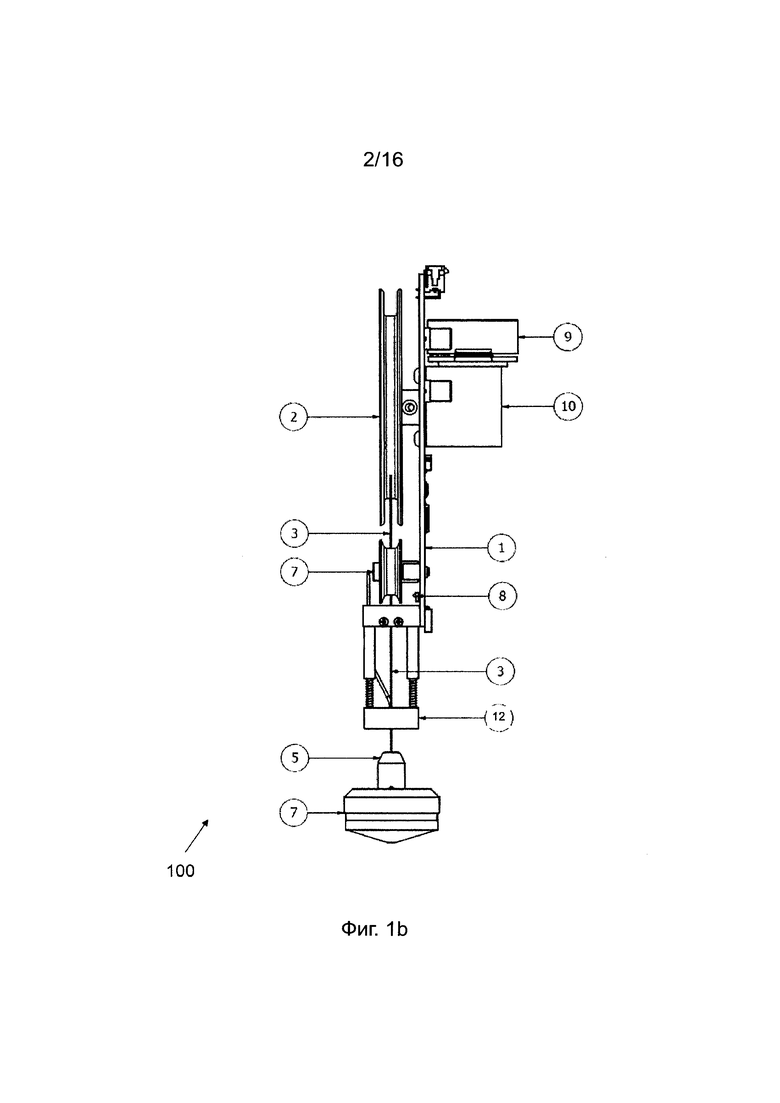
На Фиг. 1а и 1b показано схематическое изображение лебедки соответственно, вид спереди и вид сбоку согласно некоторым примерам, как описано в данном описании.
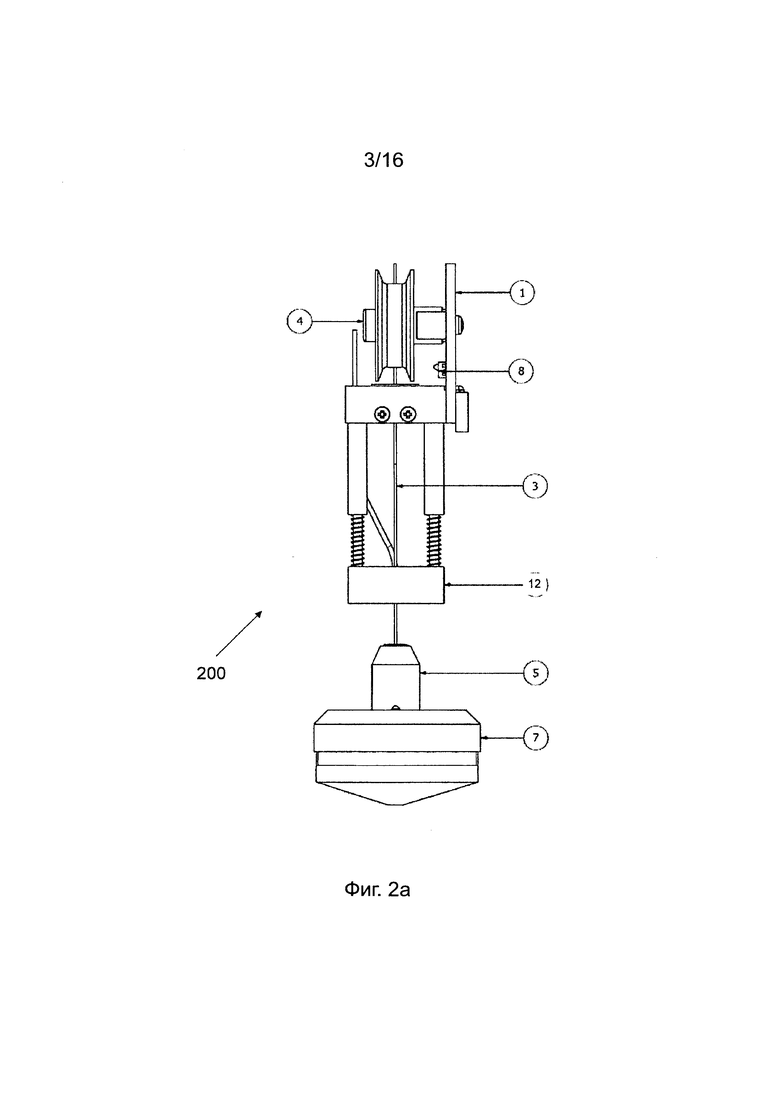
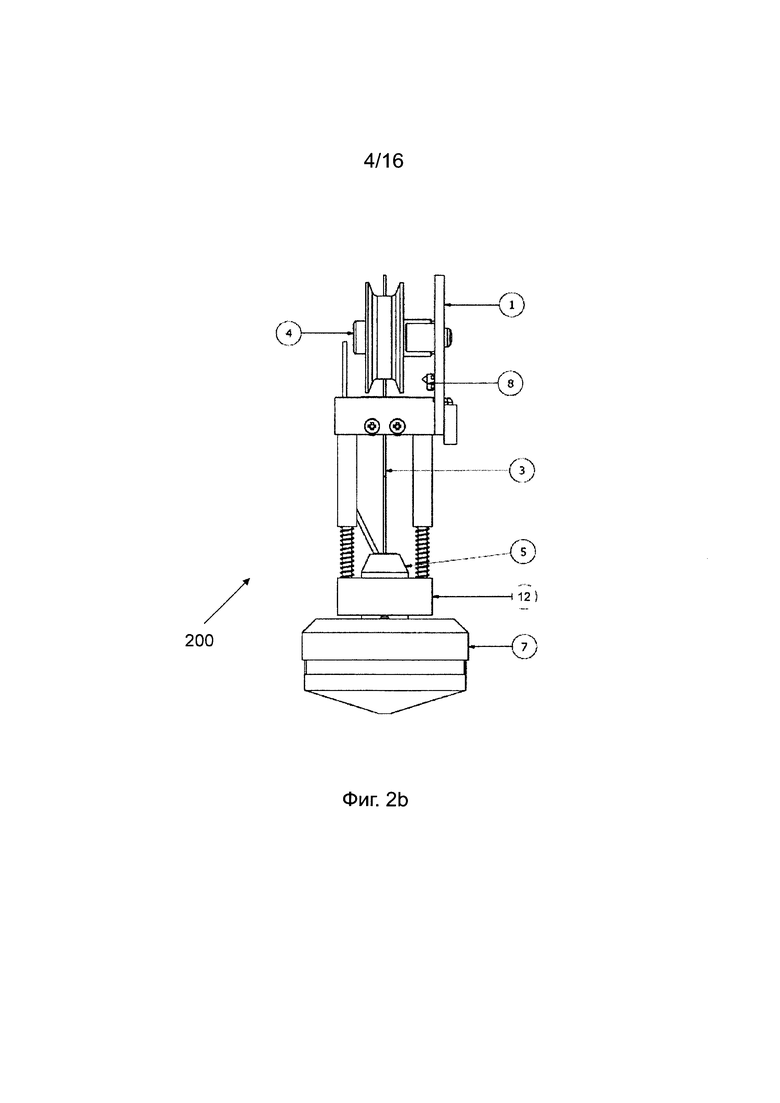
На Фиг. 2а-2с показаны схематические изображения блока ПП и груза, прикрепленного к лебедке, согласно некоторым примерам осуществления, как описано в данном описании.
На Фиг. 3а-3с показаны также схематические изображения блока ПП согласно некоторым примерам осуществления, как описано в данном описании.
На Фиг. 4а-4h показаны схематические изображения блока КНТ согласно некоторым примерам осуществления, как описано в данном описании.
На Фиг. 5а и 5b показаны схематические изображения частично поврежденного троса и блока обнаружения износа троса соответственно, согласно некоторым примерам осуществления изобретения.
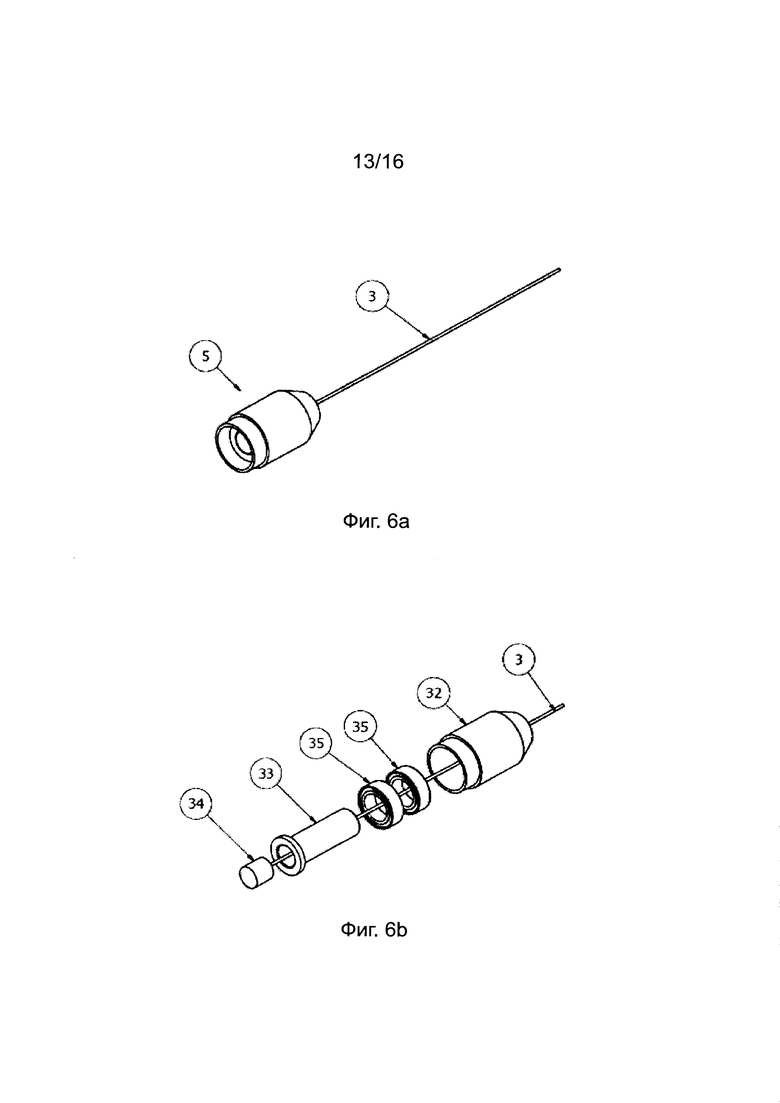
На Фиг. 6а-6с показаны схематические изображения блока для предотвращения вращения груза согласно некоторым примерам осуществления изобретения.
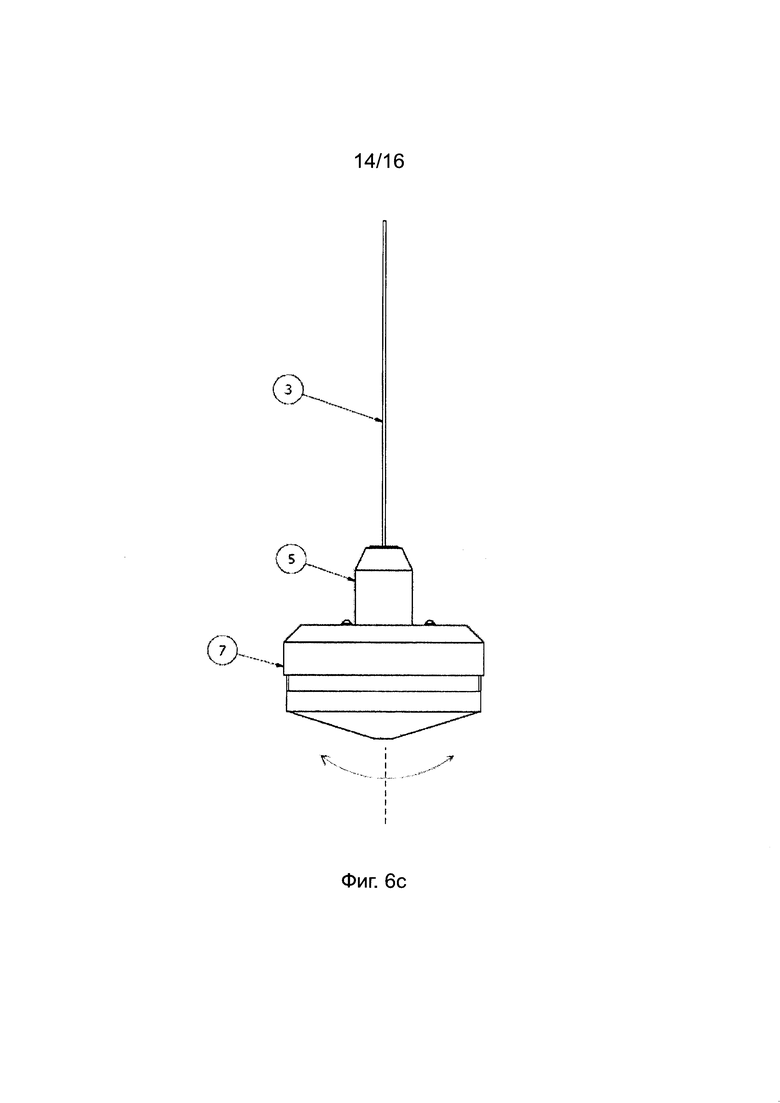
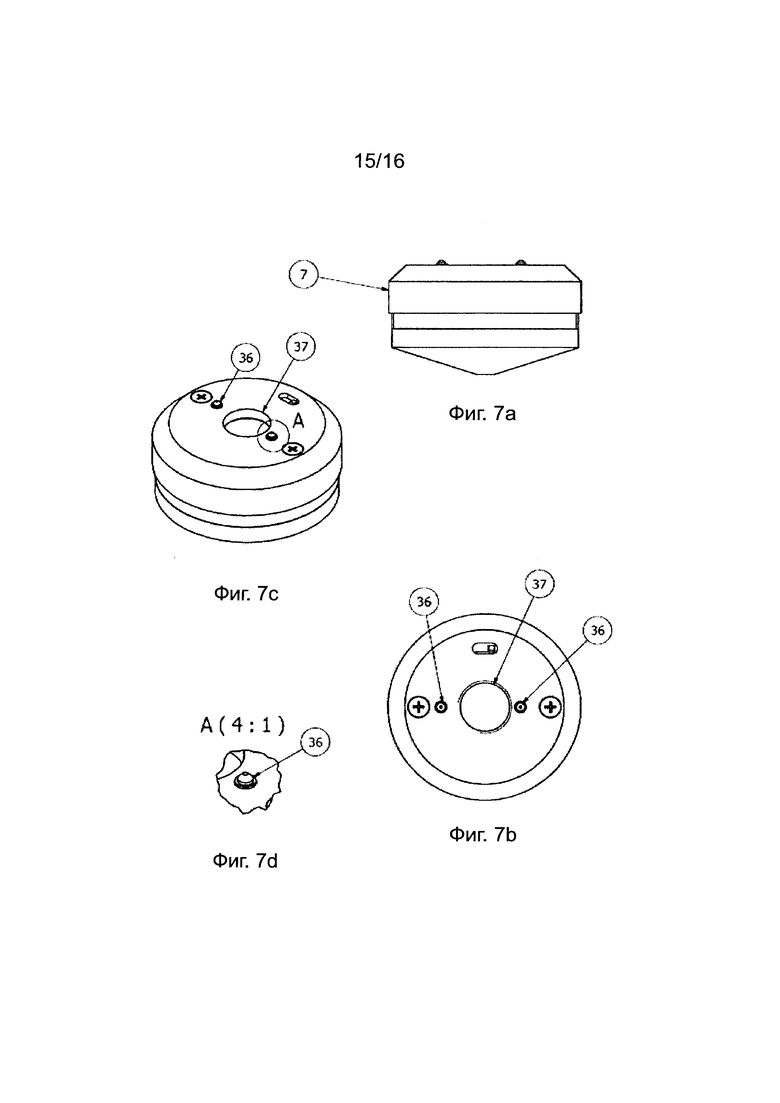
На Фиг. 7а-7d показаны различные виды объекта (груза) согласно некоторым примерам осуществления изобретения.
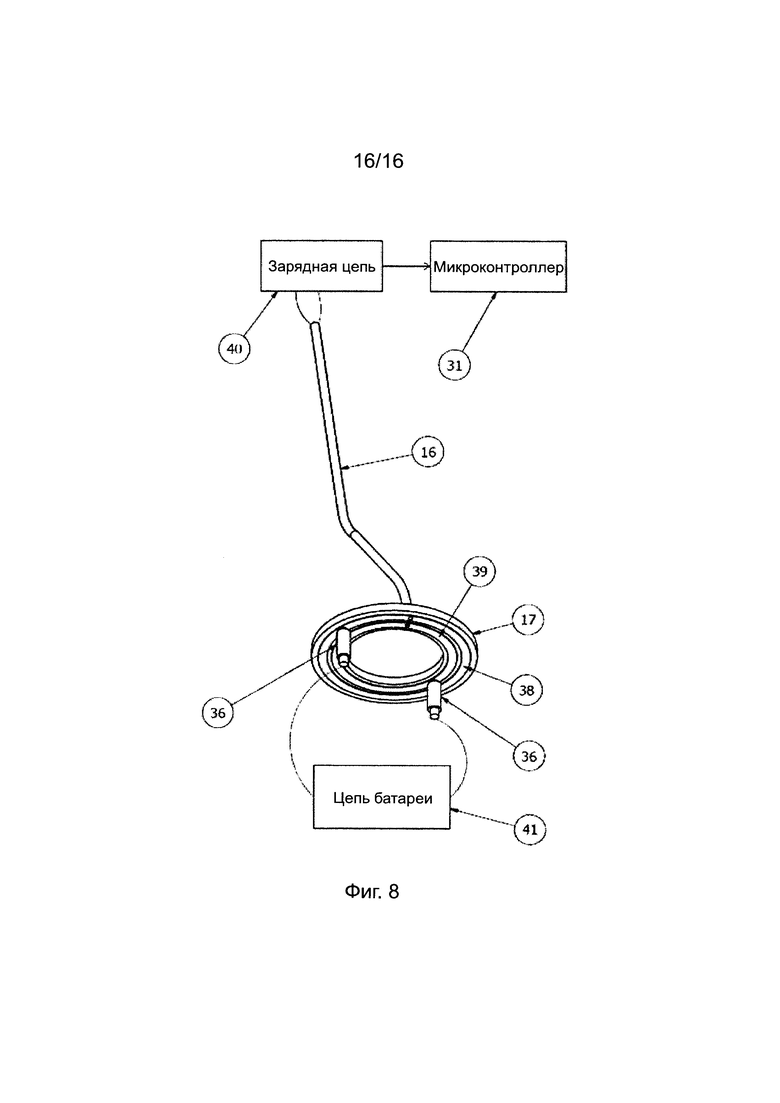
На Фиг. 8 показано схематическое изображение частей системы согласно некоторым примерам осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На Фиг. 1а показано схематического изображение лебедки 100 согласно одному из примеров осуществления изобретения, вид спереди.
В данном примере лебедка 100 содержит опорную раму 1 и тросовый барабан 2, установленный на опорной раме 1. Трос 3 может быть намотан (или размотан) на тросовый барабан 2 с помощью лебедки 100.
Контроллер 4 натяжения троса установлен в данном примере на опорной пластине 1.
Объект (груз) 7 прикреплен к лебедке 100 через устройство 5 для предотвращения вращения груза, которое в данном примере выполнено заодно с держателем груза.
Блок, предотвращающий переподъем (ПП) и содержащий первый корпус 12, установлен между блоком 5 для предотвращения вращения груза и грузом 7, прикрепленным к лебедке 100.
На Фиг 1b показан схематический вид сбоку лебедки 100.
Как показано на Фиг. 1b, блок ПП содержит в данном примере переключатель 8, который применен для инициирования предотвращения дальнейшего подъема груза 7 с помощью лебедки 100.
Лебедка 100 содержит также двигатель 9 и коробку передач 10.
Различные характеристики лебедки 100 будут описаны более подробно со ссылкой на прилагаемые чертежи.
На Фиг. 2а показано схематическое изображение блока 200 ПП согласно одному из примеров осуществления, как описано в данном документе.
В данном примере трос 3 проходит от тросового барабана 2 через блок 200 ПП к блоку 5 для предотвращения вращения груза, к которому прикреплен объект (груз) 7.
На Фиг. 2а лебедка находится на стадии, на которой объект 7 тянут вверх посредством троса 3.
На Фиг. 2b показано схематическое изображение, на котором объект 7 тянут вверх с помощью лебедки посредством троса 3 так, чтобы объект 7 касался первого корпуса 12 блока 200 ПП.
В данном примере первый корпус 12 блока 200 ПП содержит кольцевидный корпус 12, через центр которого проходит устройство 5 для предотвращения вращения груза.
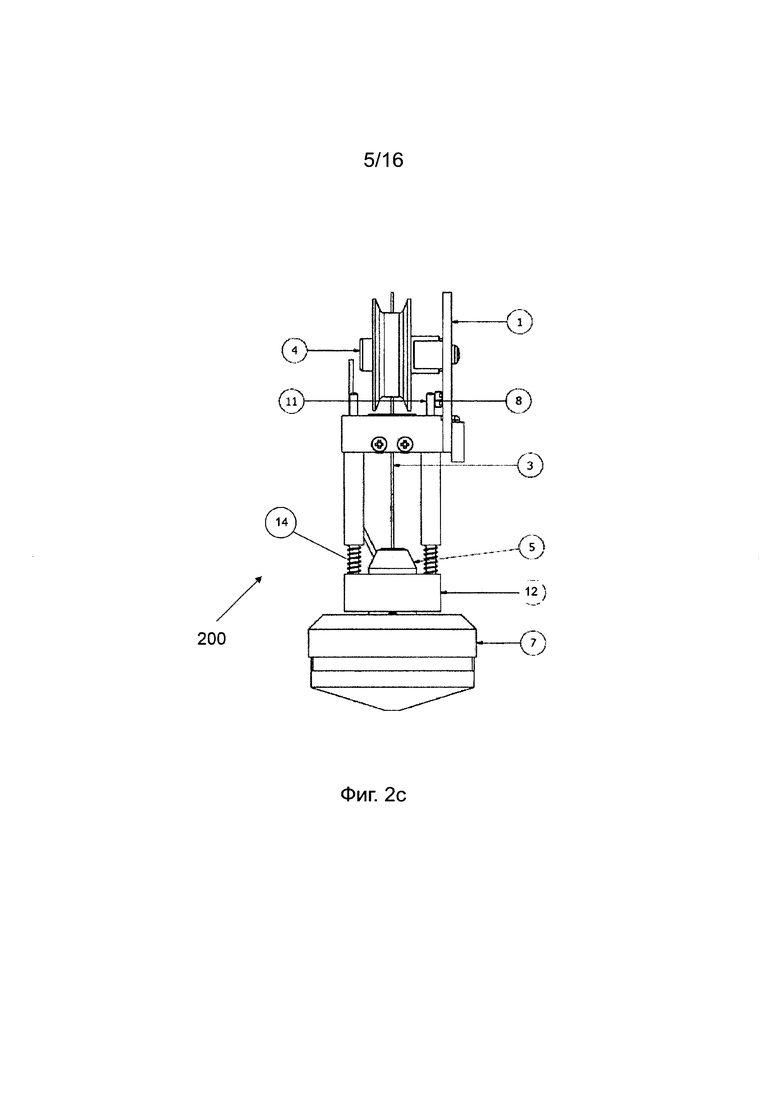
На Фиг. 2с показано схематическое изображение, на котором объект 7 также поднимают вверх с помощью лебедки. При подъеме объекта 7 до положения, показанного на Фиг. 2с, активизационные штырьки 11 блока 200 ПП в данном примере проталкивают вверх так, происходит активизация переключателя 8.
Когда происходит активизация переключателя 8, микроконтроллер останавливает движение вверх и инициирует движение вниз для освобождения (деактивизации) переключателя 8.
Нажимные пружины 14 блока 200 ПП позволяют блоку 200 ПП осуществлять тесный контакт с объектом 7.
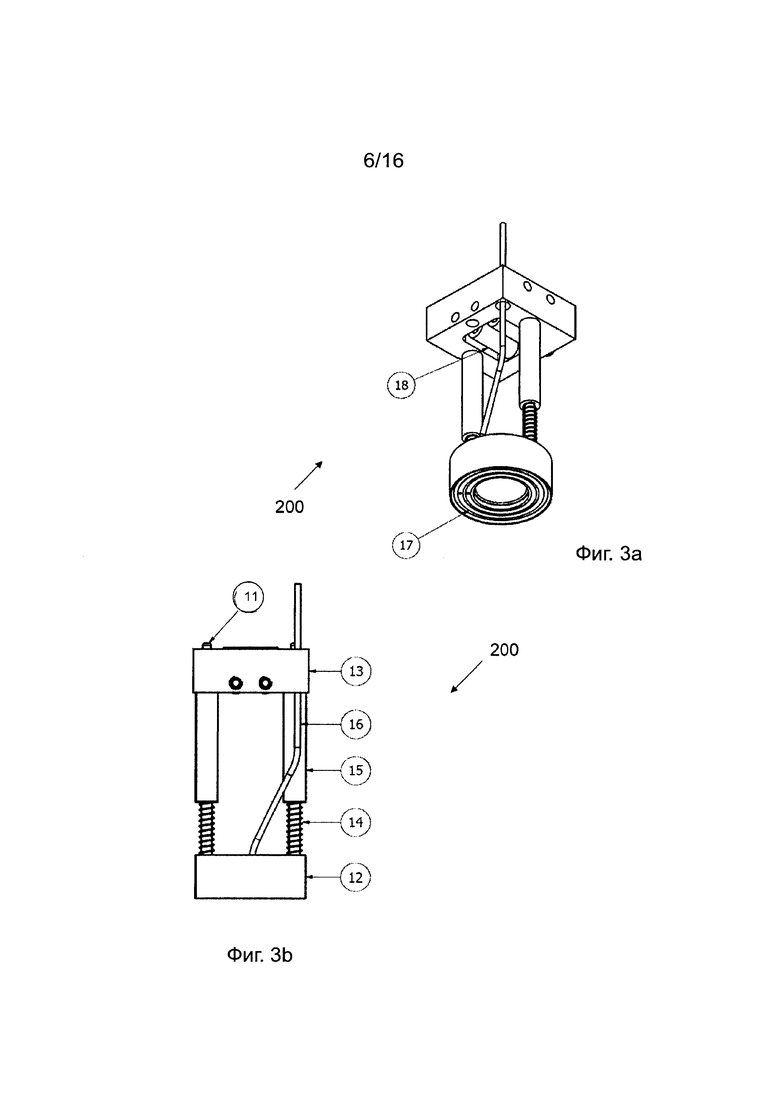
На Фиг. 3а и 3b показаны, соответственно, вид в перспективе и вид сбоку схематического изображения блока 200 ПП согласно примерам осуществления изобретения, как описано в данном документе.
Как показано на Фиг. 3а, блок 200 ПП в данном примере содержит тросовый ролик 18. Первый корпус 12 блока 200 ПП на одной из своих поверхностей содержит плату питания 17.
Как показано на Фиг. 3b, блок 200 ПП в данном примере содержит также второй корпус 13, через который могут проходить активизационные штырьки 11.
Как описано выше, нажимные пружины 14 применяют для того, чтобы блок 200 ПП находился в контакте с объектом 7 для некоторых положений блока 200 ПП относительно объекта 7.
Блок 200 ПП в данном примере также содержит салазки 15 линейного перемещения для направления активизационных штырьков 11. Имеется в наличии также питающий провод 16, который позволяет зарядной батарее объекта контактировать с блоком 200 ПП посредством платы питания 17.
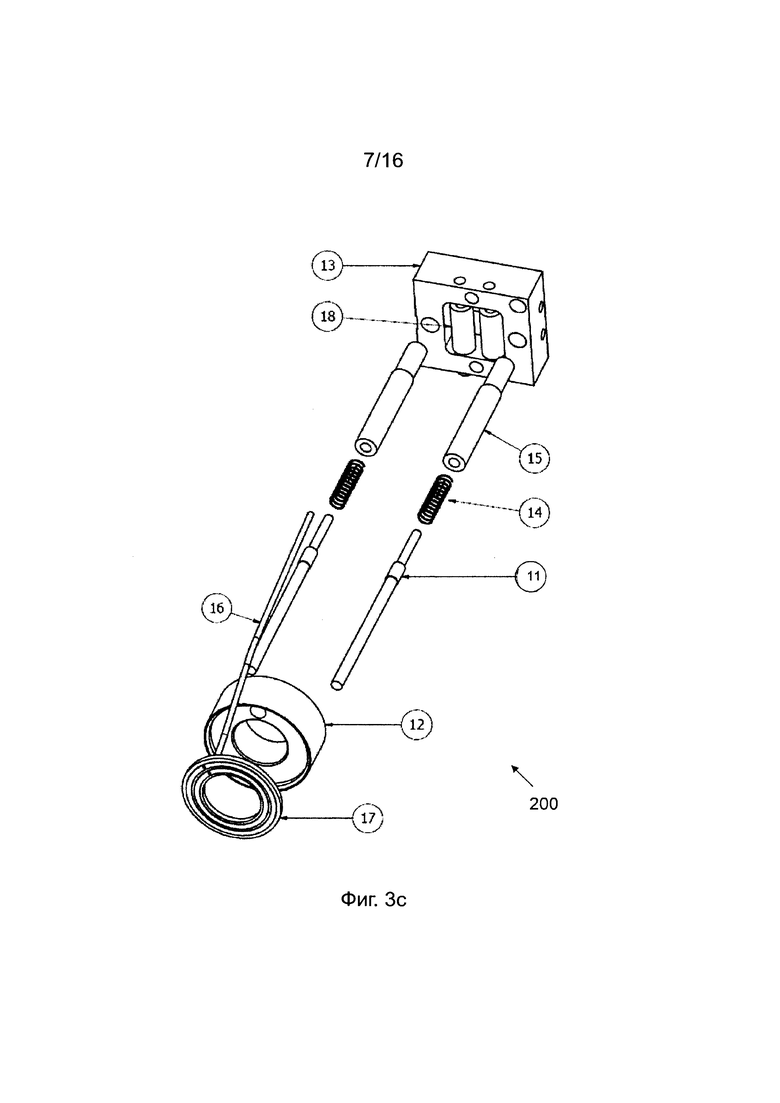
Для дальнейшего пояснения на Фиг. 3с показано схематическое изображение блока 200 ПП, в котором различные его компоненты отсоединены друг от друга.
Следует отметить, что переключатель 8 можно считать частью блока 200 ПП или отдельным компонентом лебедки, который можно активизировать с помощью блока 200 ПП.
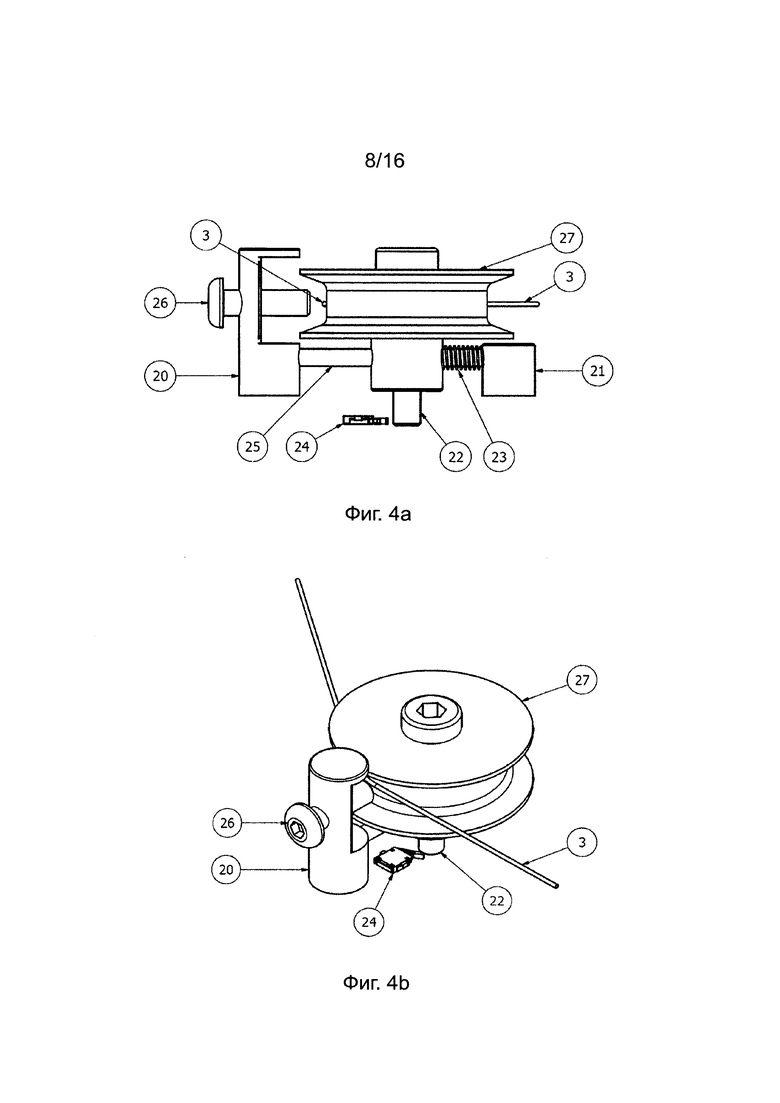
На Фиг. 4а и 4b показаны, соответственно, вид в перспективе и вид сбоку схематического изображения частей блока 400 КНТ согласно некоторым примерам осуществления, как описано в данном описании.
В данном примере блок 400 КНТ содержит первую опору 20 и вторую опору 21. Предусмотрен переключатель 24 блока 400 КНТ, что позволяет, например, активизировать лебедку для предотвращения дальнейшего наматывания или разматывания троса 3.
В данном примере нажимная пружина 23 установлена между второй опорой 21 и частью блока 400 КНТ, которая соединена с направляющим роликом 27 троса. Нажимная пружина 23 выполнена для смещения направляющего ролика 27 троса по направлению к первой опоре 20.
Переключатель 24 может быть активизирован посредством активизационного штырька 22 блока 400 КНТ.
В данном примере направляющий ролик 27 троса может быть направлен в сторону первой опоры 20 посредством оси 25 блока 400 КНТ.
В данном примере блок 400 КНТ содержит также винт 26 с плоским концом, который выполнен, например, в качестве стопорного элемента.
На Фиг. 4а и 4b показан вариант осуществления изобретения, при котором блок 400 КНТ находится в деактивизированном состоянии, т.е. в состоянии, когда трос 3 подвергают определенному натяжению. В деактивизированном состоянии блока 400 КНТ, существует зазор между винтом 26 с плоским концом и тросом 3.
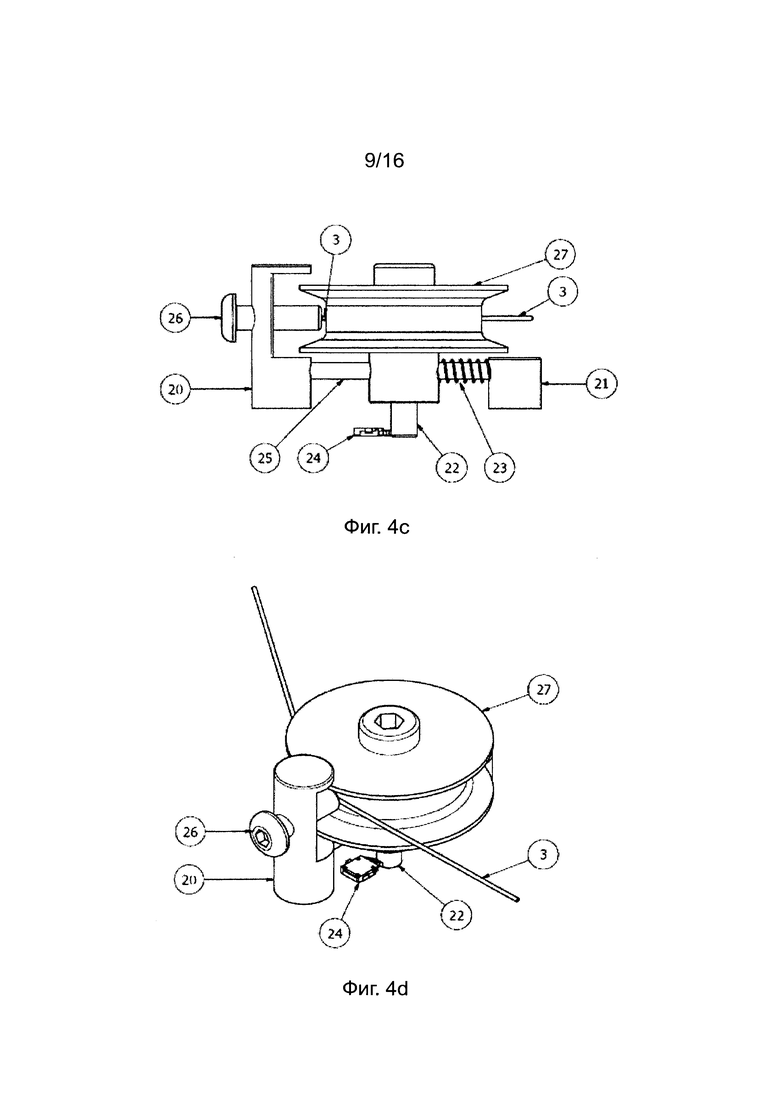
На Фиг. 4с и 4d показаны, соответственно, вид сбоку и вид в перспективе блока 400 КНТ в активном (то есть в активизированном) состоянии, т.е. когда трос 3 свободен от груза (т.е. натяжения) или если натяжение, которому подвергают трос 3, ниже заданного порогового значения.
В активном состоянии блока 400 КНТ, трос 3 в данном примере зажат между винтом 26 с плоским концом и направляющим роликом 27 троса. Переключатель 24 активизируют с помощью активизационного штырька 22 блока 400 КНТ.
Как описано выше, вариант осуществления изобретения, при котором лебедка содержит блок 400 КНТ, имеет различные практические преимущества. Например, можно предотвратить выпадение троса 3 из тросового барабана 2 во время транспортировки лебедки (без груза или с грузом ниже определенного порогового значения, прикрепленном к лебедке и при отключенном питании лебедки). Трос может быть автоматически зажат между винтом 26 с плоским концом и направляющим роликом 27 троса.
Еще одним преимуществом является то, что может быть предотвращен запуск лебедки без груза (объекта), присоединенного к ней так, чтобы не происходило выпадение троса 3 из тросового барабана 2.
Тем не менее, если объект (груз) касается земли или другого объекта во время перемещения, может быть произведена активизация лебедки для прекращения работы, т.е. также подъема и опускания объекта.
Как описано выше, винт 26 с плоским концом позволяет регулировать зазор между винтом 26 с плоским концом и направляющим роликом 27 троса в зависимости от диаметра и толщины троса 3 в направлении в общем параллельном винту 26 с плоским концом.
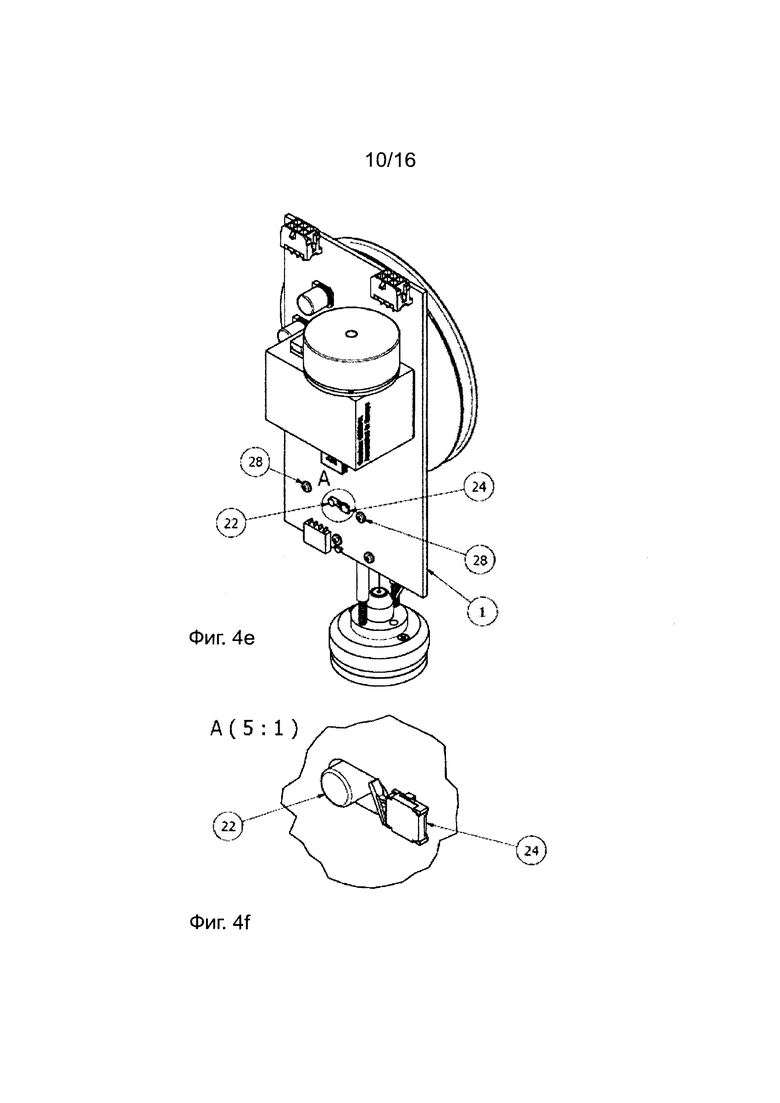
На Фиг. 4е показан схематический вид в перспективе того, как блок 400 КНТ согласно некоторым примерам осуществления может быть размещен на опорной раме 1.
В данном примере опорная рама 1 содержит печатную плату, которая может особенно подходить для (относительно) небольшой лебедки.
Блок 400 КНТ установлен на опорной раме 1 с применением множества монтажных винтов 28.
На Фиг. 4f показан развернутый вид схематического изображения блока 400 КНТ. В варианте, показанном на Фиг. 4f, блок 400 КНТ находится в деактивизированном состоянии, в котором объект, прикрепленный к тросу 3, и переключатель 24 находятся в состоянии ВЫКЛЮЧЕНО (т.е. в деактивизированном состоянии). Как можно видеть на Фиг. 4f, активизационный штырек 22 отсоединен от переключателя 24.
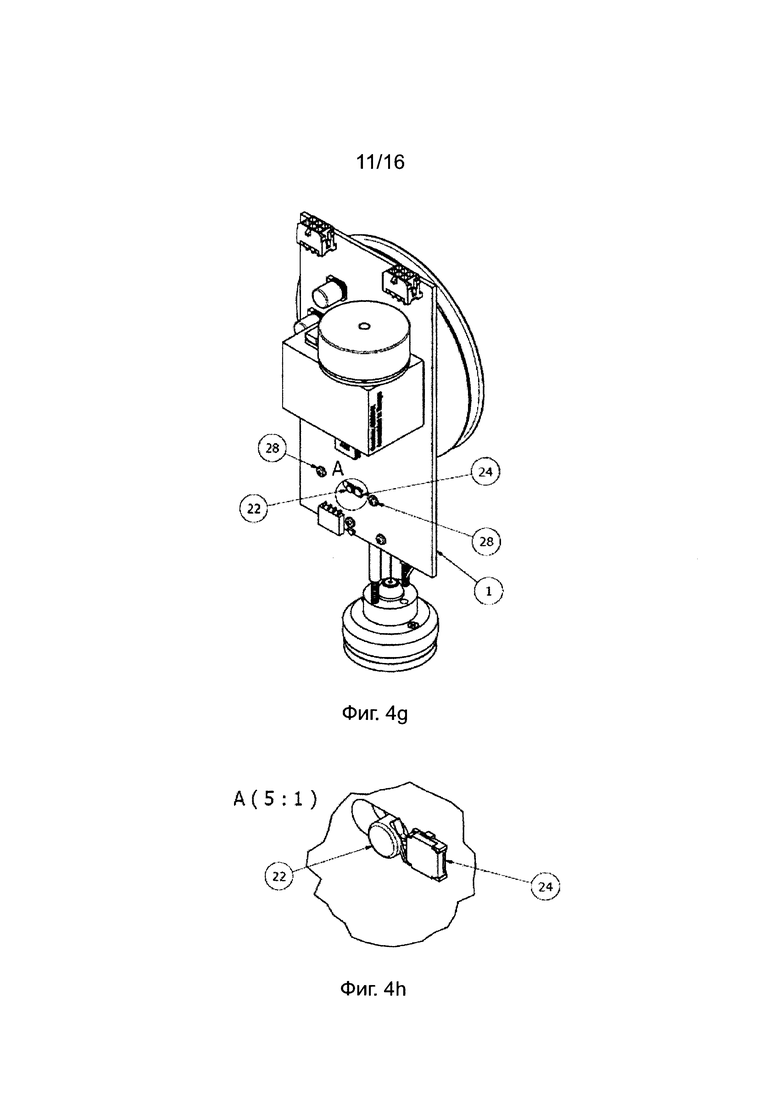
На Фиг. 4g показан схематический вид в перспективе блока 400 КНТ в активизированном состоянии.
На Фиг. 4h показан развернутый вид схематического изображения блока 400 КНТ. В варианте, показанном на Фиг. 4h, блок 400 КНТ находится в активизированном состоянии, в котором объект подсоединен к тросу 3 (или натяжение, которому подвергают трос 3, находится ниже заданного порогового значения) и переключатель 24 находится в состоянии ВКЛЮЧЕНО (т.е. в активизированном состоянии). Как можно видеть на Фиг. 4h, активизационный штырек 22 контактирует с переключателем 24.
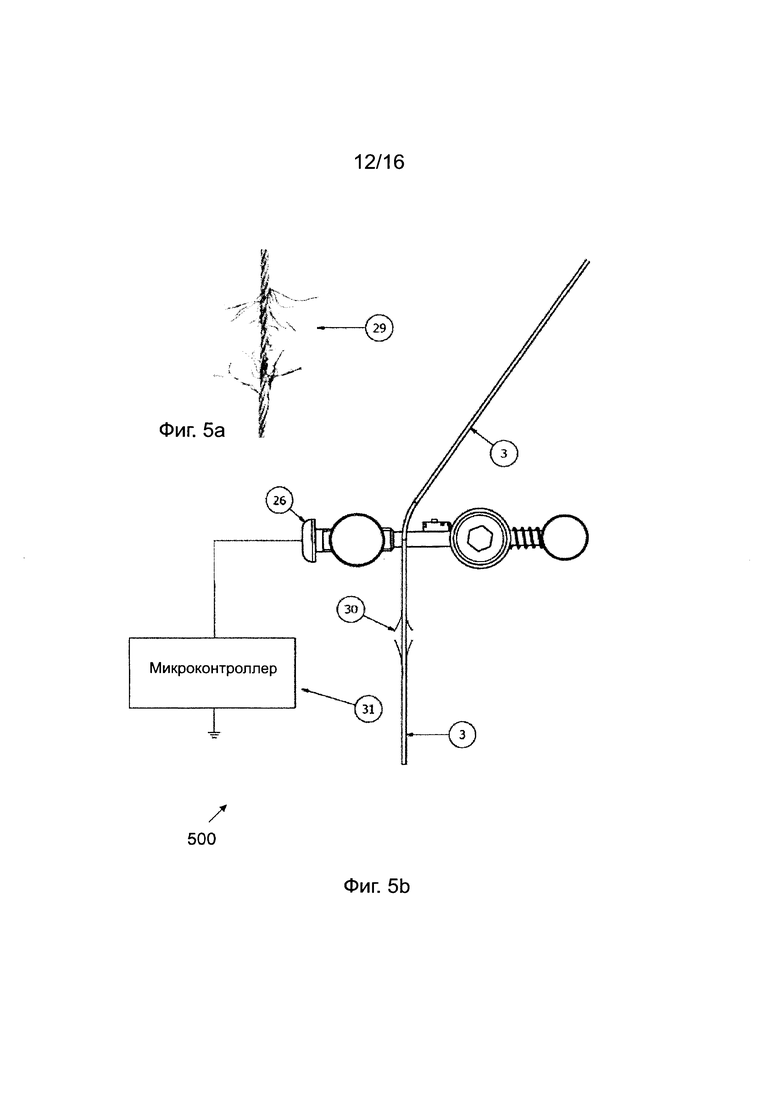
На Фиг. 5а показан трос 3 с поврежденными прядями 29, что может быть определено согласно одному из примеров выполнения блока КНТ, как описано в настоящем документе.
На Фиг. 5b показано схематическое изображение блока 500, который выполнен для обнаружения троса 3 с оборванными прядями 30.
Следует иметь в виду, что трос 3 со временем может быть подвергнут износу или обрыву, как показано на Фиг. 5а. Блок КНТ может определять, содержит ли трос 3 такие оборванные пряди 30.
В данном примере трос 3 электрически соединен с землей посредством коробки передач и двигателя. Винт 26 с плоским концом в данном примере электрически соединен с микроконтроллером 31. Когда переключатель 24 находится в состоянии ВЫКЛЮЧЕНО, микроконтроллер 31 контролирует, установлен ли электрический контакт между винтом 26 с плоским концом и оборванными прядями 30 троса. Такой электрический контакт может происходить во время движения троса вверх/вниз. Если такой электрический контакт обнаружен, микроконтроллер 31 может соответственно отреагировать, например, остановить лебедку от подъема или опускания троса 3, и/или показать пользователю лебедки посредством оптических средства, таких как светодиоды, но не ограничиваясь ими, что трос 3 содержит оборванные пряди 30, и/или посылать данные на центральный контроллер, мониторинг которого можно осуществлять.
На Фиг. 6а показано схематическое изображение устройства 5 для предотвращения вращения груза согласно одному из примеров осуществления, как описано в данном документе.
В данном примере устройство 5 для предотвращения вращения груза служит для прикрепления объекта (груза) к лебедке и для предотвращения вращения объекта вокруг вертикальной оси, определенной тросом 3, во время перемещения объекта. Это может быть особенно выгодным, так как трос 3 может перекручиваться во время вращении вверх/вниз, что может вызвать вращение объекта вместе с тросом 3. Пряди троса 3 могут быть расплетены при изменении скорости вращения наматывания/разматывания троса 3 соответственно.
На Фиг. 6b показано схематическое изображение, на котором устройство 5 для предотвращения вращения груза отсоединено.
В данном примере устройство 5 для предотвращения вращения груза содержит фиксирующее устройство 32, которое может быть применено для прикрепления объекта (груза). Опорный элемент 33 расположен между шарикоподшипниками 35 и обжимной втулкой 34 конца троса устройства 5 для предотвращения вращения груза.
Шарикоподшипники 35 служат для отсоединения объекта от троса 3, так чтобы перекручивание объекта во время перемещения было сведено к минимуму или полностью предотвращено.
На Фиг. 6с показано схематическое изображение объекта 7, прикрепленного к устройству 5 для предотвращения вращения груза. Осуществляют прекращение вращения объекта вокруг оси, как определено тросом 3, согласно примеру осуществления, как описано в данном документе.
На Фиг. 7а-7d показаны различные виды объекта 7 согласно одному из примеров осуществления, как описано в данном документе.
В данном примере объект 7 содержит электрические контакты 36. В данном примере объект имеет питание от батареи.
Объект 7 может быть, например, микрофоном, видеокамерой, датчиком уровня или осветительным устройством. Однако, следует отметить что и другие объекты могут быть подняты или опущены посредством лебедки.
Батарея объекта 7 может время от времени требовать зарядки. Зарядка батареи объекта 7 может быть осуществлена, когда объект 7 достигает устройства ПП. Затем может быть применен микроконтроллер 31 для измерения уровня зарядки батареи для определения того, следует ли заряжать батарею и/или заменить.
Может быть применен микроконтроллер 31 для получения информации также о батарее, но не ограничиваясь временем зарядки, относительно тока, используемого батареей, и относительно других параметров. Если батарея, например, не заряжена полностью, может быть предотвращен подъем или опускание груза с помощью лебедки. Любая такая команда может быть сохранена и обработана в микроконтроллере 31.
В данном примере объект 7 содержит соединительное отверстие 37, через которое объект 7 может быть прикреплен к фиксирующему устройству 32 лебедки.
На Фиг. 8 показано схематическое изображение частей системы согласно одному из примеров осуществления, как описано в данном документе.
В данном примере объект представлен исключительно электрическими контактами 36 и цепью 41 батареи.
Предусмотрены первый 38 и второй 39 проводники, посредством которых зарядная цепь 40 может заряжать батарею объекта 7. Принимая во внимание кольцевую схему расположения платы питания 17 и его электрических контактов, а также соответствующее расположение электрических частей объекта, зарядку объекта можно осуществлять независимо от угловой ориентации объекта по отношению к устройству для предотвращения вращения груза. Следовательно, даже если угловое положение объекта относительно платы питания 17 может быть неизвестным, батарея объекта подлежит зарядке.
Плата питания 17 в данном примере содержит кольцевые контакты 38 и 39, которые имеют разную полярность (+ и -). Контакты 36 также относятся к разным полюсам (+ и -) и расположены на объекте так, чтобы контактировать на печатной плате, которая обеспечивает, например, чтобы положительное напряжение находилось в контакте с соответствующим связанным контактом 36, который относится к положительному полюсу. В данном примере зарядное устройство 40 соединено с микроконтроллером 31 таким образом, чтобы можно было применять микроконтроллер 31 для контроля зарядки батареи объекта.
Следует отметить, что любые ссылки в данном описании относительно объекта или груза, который подлежит перемещению вверх/вниз, одинаково относятся к вариантам, в которых объект или груз подвергают перемещению (по меньшей мере частично) в горизонтальном направлении.
Без сомнения много других альтернативных вариантов известно специалисту в данной области техники. Должно быть понятно, что изобретение не ограничивается описанными вариантами осуществления и включает модификации, известные специалистам в данной области техники и находящиеся в пределах объема притязаний формулы изобретения, прилагаемых к данному документу.
Изобретение относится к лебедкам. Лебедка содержит блок, предотвращающий переподъем. Блок содержит триггер, предотвращающий переподъем, для запуска дальнейшего подъема груза с помощью лебедки и активатор триггера, перемещаемый между первым и вторым положением активатора триггера. Триггер находится в деактивизированном состоянии, когда активатор триггера находится в первом положении активатора триггера, и триггер находится в активизированном положении для запуска предотвращения дальнейшего подъема груза с помощью лебедки, когда активатор триггера находится во втором положении активатора триггера. Активатор триггера контактирует с грузом с обеспечением возможности активатора триггера совершать перемещение от первого ко второму положению активатора триггера при подъеме груза с помощью лебедки. Система зарядки батареи груза содержит лебедку. Лебедка содержит держатель груза и груз, прикрепленный к держателю груза, электрические контакты и батарею груза. Система выполнена с возможностью при контакте груза с блоком осуществлять зарядку батареи груза с помощью электрических контактов, приведенных в соприкосновение с практически кольцевыми электрическими контактами платы питания. Достигается возможность предотвращения вращения и переподъема груза, которые могут привести к разрыву троса. 2 н. и 13 з.п. ф-лы, 26 ил.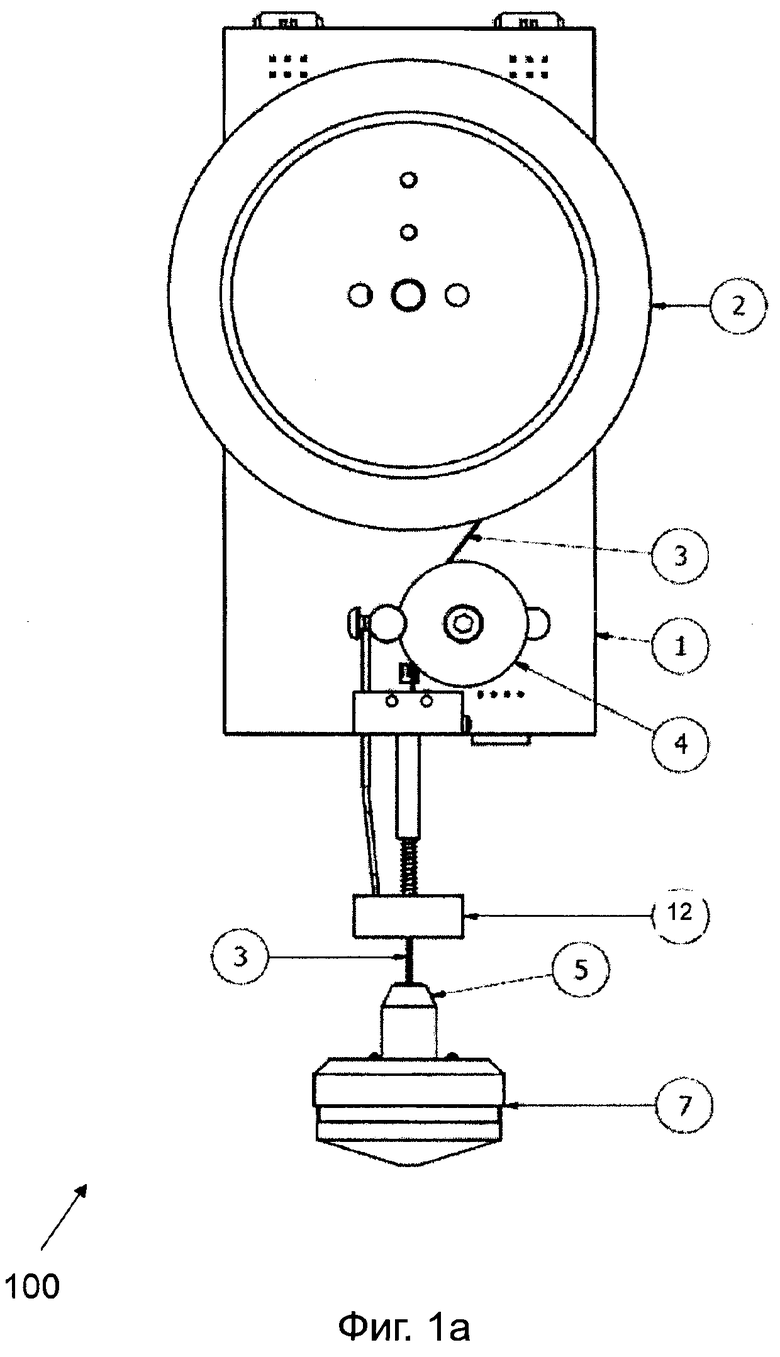
1. Лебедка (100), содержащая блок (200), предотвращающий переподъем (ПП), при этом блок ПП (200) содержит
триггер ПП (8) для запуска дальнейшего подъема груза с помощью лебедки (100) и
активатор триггера ПП (АТПП), перемещаемый между первым положением АТПП и вторым положением АТПП относительно триггера ПП (8),
при этом триггер ПП (8) находится в деактивизированном состоянии, когда АТПП находится в первом положении АТПП, и триггер ПП (8) находится в активизированном положении для запуска предотвращения дальнейшего подъема груза с помощью лебедки (100), когда АТПП находится во втором положении АТПП,
при этом АТПП контактирует с грузом с обеспечением возможности АТПП совершать перемещение от первого положения АТПП ко второму положению АТПП при подъеме груза с помощью лебедки (100).
2. Лебедка по п. 1, отличающаяся тем, что блок ПП (200) содержит один или более упругих элементов (14), выполненных для смещения АТПП в направлении первого положения АТПП.
3. Лебедка по п. 1 или 2, выполненная с возможностью автоматического опускания груза после активизации триггера ПП (8).
4. Лебедка по любому из пп. 1-3, содержащая блок (400) контроля натяжения троса (КНТ) для определения натяжения, которому подвергают трос (3) лебедки (100), при этом блок (400) КНТ содержит
триггер (24) контроля натяжения троса (КНТ) для запуска предотвращения дальнейшего наматывания и разматывания троса (3) лебедки (100) и активатор триггера КНТ (АТКНТ), перемещаемый между первым положением АТКНТ и вторым положением АТКНТ относительно триггера (24) КНТ, при этом триггер (24) КНТ находится в деактивизированном состоянии, когда АТКНТ находится в первом положении АТКНТ, при этом триггер (24) КНТ находится в активизированном состоянии для запуска предотвращения наматывания и разматывания троса (3), когда АТКНТ находится во втором положении АТКНТ, при этом АТКНТ выполнен с возможностью совершать перемещение во второе положение АТКНТ, когда натяжение, которому подвергают трос (3), становится ниже порогового значения натяжения.
5. Лебедка по п. 4, отличающаяся тем, что блок КНТ (400) содержит дополнительно упругий элемент КНТ (23), выполненный для смещения АТКНТ ко второму положению АТКНТ.
6. Лебедка по п. 5, содержащая дополнительно направляющий ролик (27) троса для приема троса (3) лебедки (100) и стопорный элемент (26) для зажимания троса (3) между направляющим роликом (27) троса и стопорным элементом (26), когда АТКНТ находится во втором положении АТКНТ.
7. Лебедка по п. 6, отличающаяся тем, что стопорный элемент (26) выполнен с возможностью совершать перемещение между различными положениями стопорного элемента относительно положения направляющего ролика (27) троса в зависимости от диаметра и толщины троса (3).
8. Лебедка по любому из пп. 4-7, отличающаяся тем, что триггер (24) КНТ расположен на печатной плате, включенной в опорную раму (1) для поддержки блока КНТ (400).
9. Лебедка по любому из пп. 4-8, отличающаяся тем, что блок КНТ (400) дополнительно содержит блок (500) обнаружения повреждения троса, выполненный для обнаружения повреждения троса (3) на основании электрического контакта, установленного между стопорным элементом (26) и тросом (3), когда триггер (24) КНТ находится в деактивизированном состоянии.
10. Лебедка по п. 9, отличающаяся тем, что блок (500) обнаружения повреждения троса выполнен с возможностью предотвращения наматывания и разматывания троса (3) лебедки (100) и/или активизирования сигнала тревоги при обнаружении электрического контакта, установленного между стопорным элементом (26) и тросом (3), когда триггер (24) КНТ находится в деактивизированном состоянии.
11. Лебедка по любому из пп. 1-10, содержащая устройство (5) предотвращения вращения груза, выполненное для отсоединения груза, который необходимо поднимать лебедкой (100), от троса (3) лебедки (100).
12. Лебедка по любому из пп. 1-11, содержащая кольцевидное тело (12) с платой питания (17), при этом плата питания (17) содержит практически кольцевые электрические контакты (38, 39), контактирующие с грузом и выполненные с возможностью подачи электрического напряжения к грузу.
13. Лебедка по п. 12, при зависимости от п. 2, в которой один или более упругих элементов (14) выполнены с возможностью стабилизации кольцевидного тела (12) после подъема или опускания лебедки (100).
14. Лебедка по п. 12 или 13, содержащая дополнительно зарядный блок (31, 40), выполненный для зарядки батареи (41) груза посредством кольцевых электрических контактов (38, 39).
15. Система зарядки батареи груза, содержащая лебедку по любому из пп. 1-14, при зависимости от или в сочетании с п. 12, при этом лебедка (100) содержит держатель груза (5) и груз (7), прикрепленный к держателю груза (5) и содержащий электрические контакты (36) груза, батарею (41) груза, при этом система выполнена с возможностью при контакте груза (7) с блоком ПП (200) осуществлять зарядку батареи (41) груза с помощью электрических контактов (36), приведенных в соприкосновение с практически кольцевыми электрическими контактами (38, 39) платы питания (17).
| US 2014145129 A1, 29.05.2014 | |||
| US 2004218394 A1, 04.11.2004 | |||
| US 6520484 B1, 18.02.2003 | |||
| WO 2008048561 A2, 24.04.2008 | |||
| Концевой выключатель к подъемной машине | 1943 |
|
SU67071A1 |
| ОГРАНИЧИТЕЛЬ ВЫСОТЫ ПОДЪЕМА ГРУЗОЗАХВАТНОГО УСТРОЙСТВА ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2401793C1 |

