Изобретение относится к радиоэлектронным системам управления (РЭСУ) летательными аппаратами и может быть использовано для самонаведения ракеты класса «воздух-воздух» на заданный тип самолета с турбореактивным двигателем (ТРД) из состава их разнотипной пары при воздействии уводящих по скорости помех.
Известен способ формирования параметров рассогласования в РЭСУ ракетой в горизонтальной Δг и вертикальной Δв плоскостях в соответствии с выражениями


где N - навигационная постоянная;
V=λF/2 - скорость сближения ракеты с целью;
F - доплеровская частота, обусловленная скоростью сближения ракеты с целью и измеряемая в автоселекторе скорости радиолокационной головки самонаведения (РГС) ракеты;
λ - рабочая длина волны РГС;
ωг и ωв - угловые скорости вращения линии визирования «ракета-цель» соответственно в горизонтальной и вертикальной плоскости, измеряемые в угломере ракеты;
Jг и Jв - собственные ускорения ракеты соответственно в горизонтальной и вертикальной плоскости, измеряемые акселерометром ракеты [1].
Недостатком данного способа формирования параметров рассогласования в РЭСУ ракетой является отсутствие возможности с его помощью осуществить самонаведение ракеты класса «воздух-воздух» на заданный тип самолета с ТРД из состава их разнотипной пары, не разрешаемой в РГС ракеты, по угловым координатам, дальности и скорости сближения ракеты с самолетами разнотипной пары (доплеровской частоте), поскольку данный способ предназначен для самонаведения ракеты только на одиночный самолет. В случае наведения ракеты на пару разнотипных самолетов ракета будет наводиться на самолет из состава их разнотипной пары случайным образом вне зависимости от предстартового целеуказания (ЦУ) (поступающего из бортовой радиолокационной станции (БРЛС) носителя ракеты) о необходимости наведении ракеты только на определенный заданный тип самолета с ТРД из состава их разнотипной пары.
Известен [2] способ формирования параметров рассогласования в РЭСУ ракетой класса «воздух-воздух» при ее самонаведении на заданный тип самолета с ТРД из состава их разнотипной пары, заключающийся в том, что в угломере РГС ракеты осуществляется измерение и получение оценки угловой скорости вращения линии визирования «ракета-не разрешаемая по угловым координатам разнотипная пара самолетов с ТРД» в горизонтальной  и вертикальной
и вертикальной  плоскостях, с помощью акселерометра измеряются собственные ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, в автоселекторе скорости РГС ракеты путем узкополосной доплеровской фильтрации на основе алгоритма быстрого преобразования Фурье (БПФ) на каждом к-ом такте его работы (где к=1,…, К; К - общее количество тактов работы алгоритма БПФ) формируются два планерных отсчета Fп1 и Fп2 доплеровских частот, обусловленных соответственно скоростями сближения ракеты с первым и вторым самолетами разнотипной пары, не разрешаемой по угловым координатам и дальности соответственно в угломере и дальномере РГС, и два компрессорных отсчета Fк1 и Fк2 доплеровских частот, обусловленных скоростями сближения ракеты с отступающими вращающимися лопатками рабочих колес первых ступеней компрессоров низкого давления (КНД) соответственно первого и второго самолетов разнотипной пары, вычисляются возможные комбинации разностей между планерными и компрессорными отсчетами доплеровских частот, как
плоскостях, с помощью акселерометра измеряются собственные ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, в автоселекторе скорости РГС ракеты путем узкополосной доплеровской фильтрации на основе алгоритма быстрого преобразования Фурье (БПФ) на каждом к-ом такте его работы (где к=1,…, К; К - общее количество тактов работы алгоритма БПФ) формируются два планерных отсчета Fп1 и Fп2 доплеровских частот, обусловленных соответственно скоростями сближения ракеты с первым и вторым самолетами разнотипной пары, не разрешаемой по угловым координатам и дальности соответственно в угломере и дальномере РГС, и два компрессорных отсчета Fк1 и Fк2 доплеровских частот, обусловленных скоростями сближения ракеты с отступающими вращающимися лопатками рабочих колес первых ступеней компрессоров низкого давления (КНД) соответственно первого и второго самолетов разнотипной пары, вычисляются возможные комбинации разностей между планерными и компрессорными отсчетами доплеровских частот, как

где i=1,2 - номер планерного отсчета доплеровской частоты;
j=1,2 - номер компрессорного отсчета доплеровской частоты, в автоселектор скорости ракеты из БРЛС ее носителя вводится предстартовое ЦУ о распознанном в ней типе самолета с ТРД из состава их пары, на который необходимо обеспечить наведение ракеты, в виде разности ΔFцу отсчетов доплеровских частот планерной и компрессорной составляющих спектра сигнала, которая соответствует только одному типу самолета с ТРД из состава их пары, вычисляются возможные комбинации модулей разностей между ΔFцу и ΔFij (i,j=1,2), определяется комбинация, которая соответствует минимальному значению вычисленного модуля разностей из их совокупности, из данной комбинации выделяется отсчет доплеровской частоты Fп1 или Fп2, в автоселекторе скорости в соответствии с предстартовым ЦУ определяется тип самолета с ТРД из состава их разнотипной пары, на который должна наводиться пущенная ракета с борта ее носителя, путем фильтрации выделенного отсчет доплеровской частоты Fп1 или Fп2 в фильтре сопровождения (ФС) осуществляется формирование соответствующей оценки  или
или  планерной составляющей доплеровской частоты, если выделен отсчет доплеровской частоты Fп1 с соответствующей его оценкой
планерной составляющей доплеровской частоты, если выделен отсчет доплеровской частоты Fп1 с соответствующей его оценкой  то осуществляется вычисление параметров рассогласования в РЭСУ ракетой в горизонтальной Δг1 и вертикальной Δв1 плоскостях в соответствии с выражениями
то осуществляется вычисление параметров рассогласования в РЭСУ ракетой в горизонтальной Δг1 и вертикальной Δв1 плоскостях в соответствии с выражениями


если выделен отсчет доплеровской частоты Fп2 с соответствующей его оценкой  то осуществляется вычисление параметров рассогласования в РЭСУ в горизонтальной Δг2 и вертикальной Δв2 плоскостях в соответствии с выражениями
то осуществляется вычисление параметров рассогласования в РЭСУ в горизонтальной Δг2 и вертикальной Δв2 плоскостях в соответствии с выражениями


Недостатком данного способа формирования параметров рассогласования в РЭСУ ракетой является отсутствие возможности с его помощью при воздействии уводящих по скорости (доплеровской частоте) помех осуществить самонаведение ракеты класса «воздух-воздух» на заданный тип самолета с ТРД из состава их разнотипной пары, не разрешаемой в РГС ракеты, по угловым координатам, дальности и скорости сближения ракеты с самолетами разнотипной пары (доплеровской частоте).
Это обусловлено тем, что воздействие уводящих по скорости (доплеровской частоте) помех приведет к формированию таких планерных отсчетов Fп1 и Fп2 доплеровских частот, которые не будут соответствовать их значениям, формируемых при отсутствии воздействия уводящих по скорости (доплеровской частоте) помех. Вследствие этого, сформированные возможные комбинации разностей между планерными и компрессорными отсчетами доплеровских частот (выражение (3)), также не будут соответствовать их значениям при отсутствии воздействия уводящих по скорости (доплеровской частоте) помех. Это, в свою очередь, приведет к тому, что на основе вычисленных возможных комбинаций модулей разностей между ΔFцу и ΔFij также не правильно будут выделены отсчеты доплеровских частот Fп1 или Fп2, которые фильтруются в соответствующих ФС. В результате сформированные в соответствии с выражениями (4)-(7) параметры рассогласования в РЭСУ не позволят обеспечить наведение ракеты на заданный в соответствии с предстартовым ЦУ тип самолета из состава их разнотипной пары.
Цель изобретения - формирование параметров рассогласования в радиоэлектронной системе управления ракетой класса «воздух-воздух», позволяющих осуществить самонаведение ракеты на заданный тип самолета с турбореактивным двигателем из состава их разнотипной пары при воздействии уводящих по скорости помех.
Для достижения цели в способе формирования параметров рассогласования в РЭСУ ракеты класса «воздух-воздух» при ее самонаведении на заданный тип самолета с ТРД из состава их разнотипной пары, заключающемся в том, что в угломере РГС ракеты осуществляется измерение и получение оценки угловой скорости вращения линии визирования «ракета-не разрешаемая по угловым координатам и дальности разнотипная пара самолетов с турбореактивными двигателями» в горизонтальной  и вертикальной
и вертикальной  плоскостях, с помощью акселерометра измеряются собственные ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, в автоселекторе скорости РГС ракеты путем узкополосной доплеровской фильтрации на основе алгоритма БПФ на каждом к-ом такте его работы (к=1,…, К; К - общее количество тактов работы алгоритма БПФ), формируются два планерных отсчета Fп1 и Fп2 доплеровских частот, обусловленных соответственно скоростями сближения ракеты с первым и вторым самолетами разнотипной пары, не разрешаемой по угловым координатам и дальности соответственно в угломере и дальномере РГС ракеты, и два компрессорных отсчета Fк1 и Fк2 доплеровских частот, обусловленных скоростями сближения ракеты с отступающими вращающимися лопатками рабочих колес первых ступеней КПД соответственно первого и второго самолетов разнотипной пары, в автоселектор скорости ракеты из БРЛС ее носителя вводится предстартовое ЦУ о распознанном в ней типе самолета с ТРД из состава их пары, на который необходимо обеспечить наведение ракеты, в виде разности ΔFцу отсчетов доплеровских частот планерной и компрессорной составляющих спектра сигнала, которая соответствует только одному типу самолета с ТРД из состава их разнотипной пары, дополнительно формируются отсчеты центроидов планерных Fцп и компрессорных Fцк отсчетов доплеровских частот соответственно, как
плоскостях, с помощью акселерометра измеряются собственные ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, в автоселекторе скорости РГС ракеты путем узкополосной доплеровской фильтрации на основе алгоритма БПФ на каждом к-ом такте его работы (к=1,…, К; К - общее количество тактов работы алгоритма БПФ), формируются два планерных отсчета Fп1 и Fп2 доплеровских частот, обусловленных соответственно скоростями сближения ракеты с первым и вторым самолетами разнотипной пары, не разрешаемой по угловым координатам и дальности соответственно в угломере и дальномере РГС ракеты, и два компрессорных отсчета Fк1 и Fк2 доплеровских частот, обусловленных скоростями сближения ракеты с отступающими вращающимися лопатками рабочих колес первых ступеней КПД соответственно первого и второго самолетов разнотипной пары, в автоселектор скорости ракеты из БРЛС ее носителя вводится предстартовое ЦУ о распознанном в ней типе самолета с ТРД из состава их пары, на который необходимо обеспечить наведение ракеты, в виде разности ΔFцу отсчетов доплеровских частот планерной и компрессорной составляющих спектра сигнала, которая соответствует только одному типу самолета с ТРД из состава их разнотипной пары, дополнительно формируются отсчеты центроидов планерных Fцп и компрессорных Fцк отсчетов доплеровских частот соответственно, как


путем фильтрации сформированных отсчетов центроидов доплеровских частот Fцп и Fцк в соответствующих фильтрах сопровождения осуществляется формирование оценок планерного  и компрессорного
и компрессорного  центроидов доплеровских частот, вычисляется оценка доплеровской частоты
центроидов доплеровских частот, вычисляется оценка доплеровской частоты  на основе производной оценки дальности
на основе производной оценки дальности  до пары не разрешаемых по дальности самолетов, формируемой на выходе ФС самолетов по дальности, как
до пары не разрешаемых по дальности самолетов, формируемой на выходе ФС самолетов по дальности, как

вычисляются разности оценок  как
как




где  - оценки компрессорных отсчетов Fк1 и Fк2 доплеровских частот с выходов соответствующих ФС,
- оценки компрессорных отсчетов Fк1 и Fк2 доплеровских частот с выходов соответствующих ФС,
вычисляется производная  модуля разности оценок планерного
модуля разности оценок планерного  и компрессорного
и компрессорного  центроидов доплеровских частот
центроидов доплеровских частот

которая сравнивается с пороговым значением ε, близким к нулю, при выполнении условия  принимается решение об отсутствии воздействия уводящих по скорости помех, в противном случае - при выполнении условия
принимается решение об отсутствии воздействия уводящих по скорости помех, в противном случае - при выполнении условия  принимается решение о воздействии уводящих по скорости помех, вычисляются модули разностей
принимается решение о воздействии уводящих по скорости помех, вычисляются модули разностей




при принятии решения об отсутствии воздействия уводящих по скорости помех определяется минимальное значение между разностями F1 (к) и F2 (к), если минимальной разностью определено значение F1 (к), то осуществляется вычисление параметров рассогласования в РЭСУ ракетой в горизонтальной Δг1 и вертикальной Δв1 плоскостях в соответствии с выражениями


если минимальной разностью определено значение F2 (к), то осуществляется вычисление параметров рассогласования в РЭСУ ракетой в горизонтальной Δг2 и вертикальной Δв2 плоскостях в соответствии с выражениями


при принятии решения о воздействии уводящих по скорости помех определяется минимальное значение между разностями F3 (к) и F4 (к), если минимальной разностью определено значение F3 (к), то осуществляется вычисление параметров рассогласования в РЭСУ ракетой в горизонтальной Δг1 и вертикальной Δв1 плоскостях в соответствии с выражениями (20) и (21), если минимальной разностью определено значение F4 (к), то осуществляется вычисление параметров рассогласования в РЭСУ ракетой в горизонтальной Δг2 и вертикальной Δв2 плоскостях в соответствии с выражениями (15) и (16).
Новыми признаками, обладающими существенными отличиями, являются следующие.
1. Формирование отсчетов центроидов планерных Fцп и компрессорных Fцк отсчетов доплеровских частот в соответствии с выражениями (8) и (9) и их фильтрация в соответствующих фильтрах сопровождения с получением на их выходах оценок 
2. Формирование двух компрессорных отсчетов Fк1 и Fк2 доплеровских частот и их фильтрация в соответствующих фильтрах сопровождения с получением оценок 
3. Принятие решения о воздействии или отсутствии воздействия уводящих по скорости помех на основе сравнения вычисленной производной  модуля разности оценок планерного
модуля разности оценок планерного  и компрессорного
и компрессорного  центроидов доплеровских частот (формула (15)), с пороговым значением ε, близким к нулю.
центроидов доплеровских частот (формула (15)), с пороговым значением ε, близким к нулю.
4. Вычисление оценки доплеровской частоты  на основе производной оценки дальности
на основе производной оценки дальности  до пары не разрешаемых по дальности самолетов, формируемой на выходе фильтра сопровождения самолетов по дальности в соответствии с (10), и вычисление разностей оценок
до пары не разрешаемых по дальности самолетов, формируемой на выходе фильтра сопровождения самолетов по дальности в соответствии с (10), и вычисление разностей оценок 
 в соответствии с выражениями (11)-(14).
в соответствии с выражениями (11)-(14).
5. Вычисление параметров рассогласования в РЭСУ ракетой в горизонтальной Δг1, Δг2 и вертикальной Δв1, Δв2 плоскостях в соответствии с выражениями (20)-(23) в зависимости от принятия решения о воздействии или отсутствии воздействия уводящих по скорости помех и предстартового ЦУ о типе самолета с ТРД, на который должна наводиться пущенная ракета.
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение всех новых признаков в совокупности с известными позволит сформировать параметры рассогласования в РЭСУ ракетой класса «воздух-воздух», позволяющие в зависимости от предстартового ЦУ осуществить самонаведение ракеты на заданный тип самолета с ТРД из состава разнотипной их пары при воздействии уводящих по скорости помех.
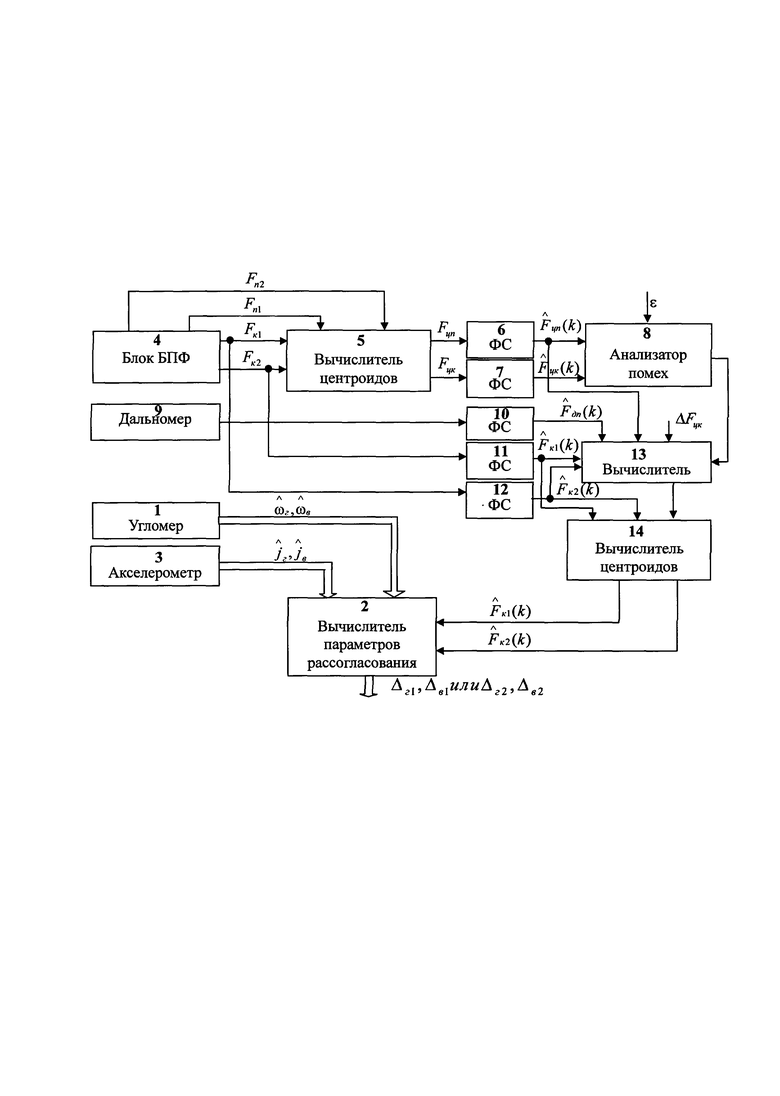
На рисунке приведена блок-схема, реализующая предлагаемый способ формирования параметров рассогласования в РЭСУ ракетой.
Предлагаемый способ реализуется следующим образом.
В угломере 1 РГС ракеты (рисунок) осуществляется измерение и получение оценки угловой скорости вращения линии визирования «ракета - не разрешаемая по угловым координатам пара самолетов» в горизонтальной  и вертикальной
и вертикальной  плоскостях, которые подаются на соответствующие входы вычислителя 2 параметров рассогласования.
плоскостях, которые подаются на соответствующие входы вычислителя 2 параметров рассогласования.
Одновременно с помощью акселерометра 3 осуществляется измерение собственных ускорений ракеты в горизонтальной Jг и вертикальной Jв плоскостях, которые подаются на соответствующие входы вычислителя 2 параметров рассогласования.
Одновременно в автоселекторе скорости РГС ракеты радиолокационный сигнал S(t), отраженный от разнотипной пары самолетов, находящихся в главном луче диаграммы направленности антенны РГС, поступает на вход блока 4 БПФ с эквивалентной полосой пропускания его одного бина, равного единицам герц (осуществляется узкополосная доплеровская фильтрация). На его выходах на каждом к-ом такте работы (к=1,…,К) формируются два планерных отсчета Fп1 и Fп2 доплеровских частот, обусловленных соответственно скоростями сближения ракеты с первым и вторым самолетами разнотипной пары, не разрешаемой по угловым координатам и дальности соответственно в угломере и дальномере РГС ракеты, и два компрессорных отсчета Fк1 и Fк2 доплеровских частот, обусловленных скоростями сближения ракеты с отступающими вращающимися лопатками рабочих колес первых ступеней КНД соответственно первого и второго самолетов разнотипной пары. В вычислителе 5 центроидов формируются отсчеты центроидов планерных Fцп и компрессорных Fцк отсчетов доплеровских частот в соответствии с выражениями (8) и (9) и их фильтрация в соответствующих фильтрах 6 и 7 сопровождения с получением на их выходах оценок  которые поступают на входы анализатора 8 помех, куда также поступает пороговое значение ε, близкое к нулю.
которые поступают на входы анализатора 8 помех, куда также поступает пороговое значение ε, близкое к нулю.
Одновременно измеренное значение дальности до не разрешаемой по дальности пары самолетов с выхода дальномера 9 поступает на вход фильтра 10 сопровождения, на выходе которого формируется оценка доплеровской частоты  на основе производной оценки дальности
на основе производной оценки дальности  до пары не разрешаемых по дальности самолетов в соответствии с выражением (10).
до пары не разрешаемых по дальности самолетов в соответствии с выражением (10).
Одновременно компрессорные отсчеты Fк1 и Fк2 доплеровских частот с выхода блока 4 БПФ поступают на вход соответствующего фильтра 11 и 12 сопровождения, на выходах которых формируются соответствующие оценки  Полученные оценки
Полученные оценки  (с выхода фильтра 6 сопровождения),
(с выхода фильтра 6 сопровождения),  (с выхода фильтра 10 сопровождения) и
(с выхода фильтра 10 сопровождения) и  (с выходов соответственно фильтров 11 и 12 сопровождения) поступают на соответствующие входы вычислителя 13. На его вход также поступает значение предстартового ЦУ в виде разности ΔFцу отсчетов доплеровских частот планерной и компрессорной составляющих спектра сигнала, которая соответствует только одному типу самолета с ТРД из состава их разнотипной пары, а также с выхода анализатора 8 помех результат принятия решения о воздействии или отсутствии воздействия уводящих по скорости помех на основе сравнения производной
(с выходов соответственно фильтров 11 и 12 сопровождения) поступают на соответствующие входы вычислителя 13. На его вход также поступает значение предстартового ЦУ в виде разности ΔFцу отсчетов доплеровских частот планерной и компрессорной составляющих спектра сигнала, которая соответствует только одному типу самолета с ТРД из состава их разнотипной пары, а также с выхода анализатора 8 помех результат принятия решения о воздействии или отсутствии воздействия уводящих по скорости помех на основе сравнения производной  модуля разности оценок планерного
модуля разности оценок планерного  и компрессорного
и компрессорного  центроидов доплеровских частот (выражение (15) с пороговым значением ε, близким к нулю. При выполнении условия
центроидов доплеровских частот (выражение (15) с пороговым значением ε, близким к нулю. При выполнении условия  в анализаторе 8 помех принимается решение об отсутствии воздействия уводящих по скорости помех, в противном случае - при выполнении условия
в анализаторе 8 помех принимается решение об отсутствии воздействия уводящих по скорости помех, в противном случае - при выполнении условия  принимается решение о воздействии уводящих по скорости помех.
принимается решение о воздействии уводящих по скорости помех.
В вычислителе 13, во-первых, в соответствии с (11)-(14) вычисляются разности оценок 
во-вторых, в соответствии с (16)-(19) вычисляются модули разностей F1 (к), F2 (к), F3 (к) и F4 (к),
в-третьих, при принятии решения об отсутствии воздействия уводящих по скорости помех определяется минимальное значение между разностями F1 (к) и F2 (к) (формулы (16) и (17)), если минимальной разностью определено значение F1 (к), то оно через коммутатор 14 поступает в вычислитель 2 параметров рассогласования, в результате чего на его выходах формируются параметры рассогласования в РЭСУ ракетой в горизонтальной Δг1 и вертикальной Δв1 плоскостях в соответствии с выражениями (20) и (21), если минимальной разностью определено значение F2 (к), то оно через коммутатор 14 поступает в вычислитель 2 параметров рассогласования, в результате чего на его выходах формируются параметры рассогласования в РЭСУ ракетой в горизонтальной Δг2 и вертикальной Δв2 плоскостях в соответствии с выражениями (22) и (23),
в-четвертых, при принятии решения о воздействии уводящих по скорости помех определяется минимальное значение между разностями F3 (к) и F4 (к) (формулы (18) и (19)), если минимальной разностью определено значение F3 (к), то оно через коммутатор 14 поступает в вычислитель 2 параметров рассогласования, в результате чего на его выходах формируются параметры рассогласования в РЭСУ ракетой в горизонтальной Δг2 и вертикальной Δв2 плоскостях в соответствии с выражениями (20) и (21), если минимальной разностью определено значение F2 (к), то оно через коммутатор 14 поступает в вычислитель 2 параметров рассогласования, в результате чего на его выходах формируются параметры рассогласования в РЭСУ ракетой в горизонтальной Δг2 и вертикальной Δв2 плоскостях в соответствии с выражениями (22) и (23).
Примеры способов распознавания типа самолета с ТРД в БРЛС, с выхода которой вводится предстартовое ЦУ в автоселектор скорости РГС ракеты в виде разности доплеровских частот ΔFцу между планерной и первой компрессорной составляющими спектра сигнала, приведены в [3,4,5].
Таким образом, применение предлагаемого изобретения позволит сформировать параметры рассогласования в РЭСУ ракетой класса «воздух-воздух», позволяющие осуществить самонаведение ракеты на заданный тип самолета из состава их разнотипной пары при воздействии уводящих по скорости помех.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Авиационные системы радиоуправления. Т. 2. Радиоэлектронные системы самонаведения / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2003, стр. 24, формула (7.32) (прототип).
2. Пат. 2758682 Российская Федерация МПК, F41G 7/22. Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса «воздух-воздух» при ее самонаведении на заданный тип самолета с турбореактивным двигателем из состава их разнотипной пары / А.В. Богданов, В.А. Голубенко, А.А. Кучин, А.А. Лобанов, Д.В. Мальцев, С.Г. Петров. - №2021106968, заявл. 16.03.2021, опубл. 01.11.2021, Бюл. №31 (прототип).
3. Пат. 2419815 Российская Федерация МПК, G01S 13/52. Способ сопровождения воздушной цели из класса «самолет с турбореактивным двигателем» / А.В. Богданов, О.В. Васильев, И.Н. Исаков И.Н., А.Г. Ситников, А.А. Филонова. - №2009140853, заявл. 03.11.2009, опубл. 27.05.2011, Бюл. №15.
4. Пат. 2705070 Российская Федерация МПК, G01S 13/52. Способ распознавания типа самолета с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции / А.В. Богданов, В.А. Голубенко, А.Г. Коваленко, А.А. Корнилов, А.А. Кучин, А.А. Лобанов, А.А. Филонов - №2019111580, заявл. 16.04.2019, опубл. 05.11.2019, Бюл. №31.
5. Пат. 2731878 Российская Федерация МПК, G01S 13/52. Способ распознавания типа самолета с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции / А.А. Анциферов, А.В. Богданов, В.А. Голубенко, Ф. Ибрагим, С.Л. Макашин, П.В. Поповка, А.А. Филонов. - №2020107653, заявл. 18.02.2020, опубл. 08.09.2020, Бюл. №25.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на заданный тип самолёта с турбореактивным двигателем из состава их разнотипной пары | 2021 |
|
RU2758682C1 |
| Способ всеракурсного самонаведения ракеты "воздух-воздух" на заданный тип самолёта из состава их разнотипной пары | 2023 |
|
RU2805782C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на вертолёт при различном характере его полёта | 2019 |
|
RU2726273C1 |
| Способ комплексирования информации радиолокационной станции и радиолокационных головок самонаведения ракет, пущенных носителем по воздушной цели при воздействии уводящих по дальности и скорости помех | 2021 |
|
RU2765145C1 |
| Способ функционирования активной радиолокационной головки самонаведения управляемой ракеты "воздух - воздух" при её самонаведении на вертолет и постановке им уводящих по дальности и скорости помех | 2024 |
|
RU2835459C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на самолёт из состава их пары по его функциональному назначению по принципу "ведущий-ведомый" | 2019 |
|
RU2695762C1 |
| Способ сопровождения в радиолокационной станции групповой воздушной цели из класса "самолёты с турбореактивными двигателями" при воздействии уводящих по скорости помех | 2016 |
|
RU2617110C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2020 |
|
RU2764781C1 |
| Способ распознавания типа самолёта с турбореактивным двигателем в импульсно-доплеровской радиолокационной станции при воздействии имитирующих помех | 2020 |
|
RU2735314C1 |
| Способ сопровождения воздушной цели из класса "самолёт с турбореактивным двигателем" при воздействии уводящих по дальности и скорости помех | 2018 |
|
RU2665031C1 |
Изобретение относится к радиоэлектронным системам управления (РЭСУ) летательными аппаратами и может быть использовано для самонаведения ракеты класса «воздух-воздух» на заданный тип самолета с турбореактивным двигателем (ТРД) из состава их разнотипной пары при воздействии уводящих по скорости помех. Достигаемый технический результат - формирование параметров рассогласования в РЭСУ ракетой класса «воздух-воздух», позволяющих осуществить самонаведение ракеты на заданный тип самолета с ТРД из состава их разнотипной пары при воздействии уводящих по скорости помех. Способ заключается в том, что в угломере радиолокационной головки самонаведения (РГС) ракеты осуществляется измерение и получение оценки угловой скорости вращения линии визирования «ракета-не разрешаемая по угловым координатам и дальности разнотипная пара самолетов с ТРД» в горизонтальной и вертикальной плоскостях, с помощью акселерометра измеряются собственные ускорения ракеты в горизонтальной и вертикальной плоскостях, в автоселекторе скорости РГС ракеты формируются по два планерных и компрессионных отсчета доплеровских частот, в автоселектор скорости ракеты вводится предстартовое целеуказание о распознанном в ней типе самолета с ТРД, формируются отсчеты центроидов планерных и компрессорных отсчетов доплеровских частот, осуществляется формирование их оценок, вычисляется оценка доплеровской частоты, вычисляются разности оценок, вычисляется производная модуля разности оценок планерного и компрессорного центроидов доплеровских частот, которая сравнивается с пороговым значением, близким к нулю, далее принимается решение о воздействии уводящих по скорости помех или их отсутствии, в случае наличия воздействия - осуществляется вычисление параметров рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях. 1 ил.
Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса «воздух-воздух» при ее самонаведении на заданный тип самолета с турбореактивным двигателем из состава их разнотипной пары при воздействии уводящих по скорости помех, заключающийся в том, что в угломере радиолокационной головки самонаведения ракеты осуществляется измерение и получение оценки угловой скорости вращения линии визирования «ракета-неразрешаемая по угловым координатам и дальности разнотипная пара самолетов с турбореактивными двигателями» в горизонтальной  и вертикальной
и вертикальной  плоскостях, с помощью акселерометра измеряются собственные ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, в автоселекторе скорости радиолокационной головки самонаведения ракеты путем узкополосной доплеровской фильтрации на основе алгоритма быстрого преобразования Фурье на каждом к-ом такте его работы, где к=1,…, К; К - общее количество тактов работы алгоритма быстрого преобразования Фурье, формируются два планерных отсчета Fп1 и Fп2 доплеровских частот, обусловленных соответственно скоростями сближения ракеты с первым и вторым самолетами разнотипной пары, неразрешаемой по угловым координатам и дальности соответственно в угломере и дальномере радиолокационной головки самонаведения ракеты, и два компрессорных отсчета Fк1 и Fк2 доплеровских частот, обусловленных скоростями сближения ракеты с отступающими вращающимися лопатками рабочих колес первых ступеней компрессоров низкого давления соответственно первого и второго самолетов разнотипной пары, в автоселектор скорости ракеты из бортовой радиолокационной станции ее носителя вводится предстартовое целеуказание о распознанном в ней типе самолета с турбореактивным двигателем из состава их пары, на который необходимо обеспечить наведение ракеты, в виде разности ΔFцу отсчетов доплеровских частот планерной и компрессорной составляющих спектра сигнала, которая соответствует только одному типу самолета с турбореактивным двигателем из состава их разнотипной пары, отличающийся тем, что формируются отсчеты центроидов планерных Fцп и компрессорных Fцк отсчетов доплеровских частот соответственно, как
плоскостях, с помощью акселерометра измеряются собственные ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, в автоселекторе скорости радиолокационной головки самонаведения ракеты путем узкополосной доплеровской фильтрации на основе алгоритма быстрого преобразования Фурье на каждом к-ом такте его работы, где к=1,…, К; К - общее количество тактов работы алгоритма быстрого преобразования Фурье, формируются два планерных отсчета Fп1 и Fп2 доплеровских частот, обусловленных соответственно скоростями сближения ракеты с первым и вторым самолетами разнотипной пары, неразрешаемой по угловым координатам и дальности соответственно в угломере и дальномере радиолокационной головки самонаведения ракеты, и два компрессорных отсчета Fк1 и Fк2 доплеровских частот, обусловленных скоростями сближения ракеты с отступающими вращающимися лопатками рабочих колес первых ступеней компрессоров низкого давления соответственно первого и второго самолетов разнотипной пары, в автоселектор скорости ракеты из бортовой радиолокационной станции ее носителя вводится предстартовое целеуказание о распознанном в ней типе самолета с турбореактивным двигателем из состава их пары, на который необходимо обеспечить наведение ракеты, в виде разности ΔFцу отсчетов доплеровских частот планерной и компрессорной составляющих спектра сигнала, которая соответствует только одному типу самолета с турбореактивным двигателем из состава их разнотипной пары, отличающийся тем, что формируются отсчеты центроидов планерных Fцп и компрессорных Fцк отсчетов доплеровских частот соответственно, как


путем фильтрации сформированных отсчетов центроидов доплеровских частот Fцп и Fцк в соответствующих фильтрах сопровождения осуществляется формирование оценок планерного  и компрессорного
и компрессорного  центроидов доплеровских частот, вычисляется оценка доплеровской частоты
центроидов доплеровских частот, вычисляется оценка доплеровской частоты  на основе производной оценки дальности
на основе производной оценки дальности  до пары не разрешаемых по дальности самолетов, формируемой на выходе фильтра сопровождения самолетов по дальности, как
до пары не разрешаемых по дальности самолетов, формируемой на выходе фильтра сопровождения самолетов по дальности, как

где λ - рабочая длина волны радиолокационной головки самонаведения ракеты,
вычисляются разности оценок  как
как




где  и
и  - оценки компрессорных отсчетов Fк1 и Fк2 доплеровских частот с выходов соответствующих фильтров сопровождения, вычисляется производная
- оценки компрессорных отсчетов Fк1 и Fк2 доплеровских частот с выходов соответствующих фильтров сопровождения, вычисляется производная  модуля разности оценок планерного
модуля разности оценок планерного  и компрессорного
и компрессорного  центроидов доплеровских частот
центроидов доплеровских частот

которая сравнивается с пороговым значением ε, близким к нулю, при выполнении условия  принимается решение об отсутствии воздействия уводящих по скорости помех, в противном случае - при выполнении условия
принимается решение об отсутствии воздействия уводящих по скорости помех, в противном случае - при выполнении условия  принимается решение о воздействии уводящих по скорости помех, вычисляются модули разностей
принимается решение о воздействии уводящих по скорости помех, вычисляются модули разностей




при принятии решения об отсутствии воздействия уводящих по скорости помех определяется минимальное значение между разностями F1 (к) и F2 (к), если минимальной разностью определено значение F1 (к), то осуществляется вычисление параметров рассогласования в радиоэлектронной системе управления ракетой в горизонтальной Δг1 и вертикальной Δв1 плоскостях в соответствии с выражениями


где N - навигационная постоянная,
если минимальной разностью определено значение F2 (к), то осуществляется вычисление параметров рассогласования в радиоэлектронной системе управления ракетой в горизонтальной Δг2 и вертикальной Δв2 плоскостях в соответствии с выражениями


при принятии решения о воздействии уводящих по скорости помех определяется минимальное значение между разностями F3 (к) и F4 (к), если минимальной разностью определено значение F3 (к), то осуществляется вычисление параметров рассогласования в радиоэлектронной системе управления ракетой в горизонтальной Δг1 и вертикальной Δв1 плоскостях в соответствии с выражениями (13) и (14), если минимальной разностью определено значение F4 (к), то осуществляется вычисление параметров рассогласования в радиоэлектронной системе управления ракетой в горизонтальной Δг2 и вертикальной Δв2 плоскостях в соответствии с выражениями (15) и (16).
| СПОСОБ ОБНАРУЖЕНИЯ И ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СКОРОСТНЫХ ЛЕТЯЩИХ ЦЕЛЕЙ И ГОЛОВКА САМОНАВЕДЕНИЯ, ЕГО РЕАЛИЗУЮЩАЯ | 2015 |
|
RU2603235C2 |
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ НА ПОЛУНАТУРНОЙ МОДЕЛИ ЭФФЕКТИВНОСТИ РАДИОПОДАВЛЕНИЯ РАДИОЛОКАЦИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2018 |
|
RU2695496C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| US 7053815 B1, 30.05.2006 | |||
| US 4494202 A1, 15.01.1985 | |||
| WO 2011066164 A1, 03.06.2011. | |||

