Изобретение относится к радиоэлектронным системам управления (РЭСУ) летательными аппаратами и может быть использовано для самонаведения ракеты класса «воздух-воздух» на самолет из состава их пары по его функциональному назначению по принципу «ведущий-ведомый».
Известен способ формирования параметров рассогласования в РЭСУ ракетой в горизонтальной Δг и вертикальной Δв плоскостях в соответствии с выражениями


где
Кϕг, Кϕв и Кϕг Кϕв - постоянные коэффициенты, значения которых выбираются таким образом, чтобы траектория наведения ракеты была близка к прямолинейной;
ϕг и ϕв - бортовые пеленги цели соответственно в горизонтальной и вертикальной плоскости;
ωг и ωв - угловые скорости вращения линии визирования «ракета-цель» соответственно в горизонтальной и вертикальной плоскости. При этом, бортовые пеленги и угловые скорости линии визирования «ракета-цель» измеряются в угломере радиолокационной головки самонаведения (РГС) ракеты [1].
Недостатком данного способа формирования параметров рассогласования в РЭСУ ракетой является отсутствие возможности с его помощью осуществить самонаведение ракеты класса «воздух-воздух» на самолет из состава их пары (не разрешаемой в РГС ракеты по угловым координатам) по функциональному назначению самолета по принципу «ведущий-ведомый».
Известен способ формирования параметров рассогласования в РЭСУ ракетой в горизонтальной Δг и вертикальной Δв плоскостях в соответствии с выражениями


где
N - навигационная постоянная;
V=λF/2 - скорость сближения ракеты с целью;
F - доплеровская частота, обусловленная скоростью сближения ракеты с целью и измеряемая в автоселекторе скорости РГС ракеты;
Jг и Jв - собственные ускорения ракеты соответственно в горизонтальной и вертикальной плоскости, измеряемые акселерометром ракеты [2].
Недостатком данного способа формирования параметров рассогласования в РЭСУ ракетой является отсутствие возможности с его помощью осуществить самонаведение ракеты класса «воздух-воздух» на самолет из состава их пары, не разрешаемой в РГС ракеты, как по угловым координатам, так и по скорости сближения ракеты с самолетами пары (доплеровской частоте) по функциональному назначению самолета по принципу «ведущий-ведомый», поскольку данный способ предназначен для самонаведения ракеты только на одиночный самолет, а в случае наведения ее на пару самолетов ракета будет наводиться на самолет из состава пары случайным образом вне зависимости от предстартового целеуказания о наведении ракеты на ведущий (ВЩ) или ведомый (ВМ) самолет пары.
Цель изобретения - формирование параметров рассогласования в радиоэлектронной системе управления ракетой класса «воздух-воздух», позволяющих осуществить самонаведение ракеты на самолет из состава их пары по его функциональному назначению по принципу «ведущий-ведомый».
Для достижения цели в способе формирования параметров рассогласования в РЭСУ ракетой класса «воздух-воздух» при ее самонаведении на самолет из состава их пары по его функциональному назначению по принципу «ведущий-ведомый», заключающимся в том, что в угломере РГС ракеты осуществляется измерение и получение оценки угловой скорости вращения линии визирования «ракета - не разрешаемая по угловым координатам пара самолетов» в горизонтальной  и вертикальной
и вертикальной  плоскостях, измерении с помощью акселерометра собственного ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, дополнительно в автоселекторе скорости РГС ракеты путем узкополосной доплеровской фильтрации на основе алгоритма быстрого преобразования Фурье (БПФ) на каждом к-ом такте его работы, к=1,…,I,…,К,
плоскостях, измерении с помощью акселерометра собственного ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, дополнительно в автоселекторе скорости РГС ракеты путем узкополосной доплеровской фильтрации на основе алгоритма быстрого преобразования Фурье (БПФ) на каждом к-ом такте его работы, к=1,…,I,…,К,
где К - общее количество тактов работы алгоритма БПФ;
I - количество тактов работы алгоритма БПФ, при достижении которого осуществляется вычисление автокорреляционных функций (АКФ) оценок траекторий доплеровских частот,
формируются два отсчета доплеровских частот, обусловленных скоростями сближения ракеты с ведущим и ведомым самолетами пары, не разрешаемой по угловым координатам в угломере РГС ракеты, путем фильтрации в соответствующих двух фильтрах сопровождения двух отсчетов доплеровских частот осуществляется формирование и запоминание значений двух оценок  и
и  траекторий доплеровских частот, при достижении количества тактов работы алгоритма БПФ, равного I, вычисляются две АКФ для соответствующих двух оценок траекторий доплеровских частот и определяются параметры первой АКФ, вычисленной по первой оценке
траекторий доплеровских частот, при достижении количества тактов работы алгоритма БПФ, равного I, вычисляются две АКФ для соответствующих двух оценок траекторий доплеровских частот и определяются параметры первой АКФ, вычисленной по первой оценке  траектории доплеровской частоты - время корреляции τ1, собственная частота f01 АКФ и среднеквадратическое отклонение (СКО) σ1 флюктуаций доплеровской частоты и параметры второй АКФ, вычисленной по второй оценке
траектории доплеровской частоты - время корреляции τ1, собственная частота f01 АКФ и среднеквадратическое отклонение (СКО) σ1 флюктуаций доплеровской частоты и параметры второй АКФ, вычисленной по второй оценке  траектории доплеровской частоты - время корреляции τ2, собственная частота f02 автокорреляционной функции и СКО σ2 флюктуаций доплеровской частоты, осуществляется анализ параметров АКФ, при выполнении условий
траектории доплеровской частоты - время корреляции τ2, собственная частота f02 автокорреляционной функции и СКО σ2 флюктуаций доплеровской частоты, осуществляется анализ параметров АКФ, при выполнении условий

принимается решение о том, что оценка первой траектории доплеровской частоты  обусловлена скоростью сближения ракеты с ведущим самолетом пары, а оценка
обусловлена скоростью сближения ракеты с ведущим самолетом пары, а оценка  обусловлена скоростью сближения ракеты с ведомым самолетом пары, в этом случае при предстартовом целеуказании о наведении ракеты на ведущего самолета из состава пары параметры рассогласования в РЭСУ ракетой в горизонтальной Δгвщ и вертикальной Δввщ плоскостях после I тактов работы алгоритма БПФ будут формироваться в соответствии с выражениями
обусловлена скоростью сближения ракеты с ведомым самолетом пары, в этом случае при предстартовом целеуказании о наведении ракеты на ведущего самолета из состава пары параметры рассогласования в РЭСУ ракетой в горизонтальной Δгвщ и вертикальной Δввщ плоскостях после I тактов работы алгоритма БПФ будут формироваться в соответствии с выражениями


при предстартовом целеуказании о наведении ракеты на ведомого самолета из состава пары параметры рассогласования в РЭСУ ракетой в горизонтальной Δгвм и вертикальной Δввм плоскостях после I тактов работы алгоритма БПФ будут формироваться в соответствии с выражениями


при выполнении условий

принимается решение о том, что оценка первой траектории доплеровской частоты  обусловлена скоростью сближения ракеты с ведомым самолетом пары, а оценка
обусловлена скоростью сближения ракеты с ведомым самолетом пары, а оценка  обусловлена скоростью сближения ракеты с ведущим самолетом пары, в этом случае при предстартовом целеуказании о наведении ракеты на ведущего самолета из состава пары параметры рассогласования в РЭСУ ракетой в горизонтальной Δгвщ и вертикальной Δввщ плоскостях после I тактов работы алгоритма БПФ будут формироваться в соответствии с выражениями
обусловлена скоростью сближения ракеты с ведущим самолетом пары, в этом случае при предстартовом целеуказании о наведении ракеты на ведущего самолета из состава пары параметры рассогласования в РЭСУ ракетой в горизонтальной Δгвщ и вертикальной Δввщ плоскостях после I тактов работы алгоритма БПФ будут формироваться в соответствии с выражениями


при предстартовом целеуказании о наведении ракеты на ведомого самолета из состава пары параметры рассогласования в РЭСУ ракетой в горизонтальной Δгвм и вертикальной Δввм плоскостях после I тактов работы алгоритма БПФ будут формироваться в соответствии с выражениями


Новыми признаками, обладающими существенными отличиями, являются следующие.
1. Формирование в автоселекторе скорости РГС ракеты путем узкополосной доплеровской фильтрации на основе алгоритма БПФ на каждом такте его работы двух отсчетов доплеровских частот, обусловленных скоростями сближения ракеты с ведущим и ведомым самолетами пары, что позволяет осуществить разрешение по скорости (доплеровской частоте) не разрешаемые по угловым координатам самолеты пары.
2. Идентификация оценок траекторий доплеровских частот, обусловленных скоростями сближения ракеты с ведущим и ведомым самолетом их пары на основе анализа параметров АКФ в соответствии с выражениями (5) и (10).
3. Формирование параметров рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях в соответствии с выражениями (6) и (7) при предстартовом целеуказании о наведении ракеты на ведущего самолета их пары или в соответствии с выражениями (8) и (9) при предстартовом целеуказании о наведении ракеты на ведомого самолета их пары при выполнении условий (5).
4. Формирование параметров рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях в соответствии с выражениями (11) и (12) при предстартовом целеуказании о наведении ракеты на ведущего самолета их пары или в соответствии с выражениями (13) и (14) при предстартовом целеуказании о наведении ракеты на ведомого самолета их пары при выполнении условий (10).
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение всех новых признаков позволит сформировать параметры рассогласования в РЭСУ ракетой класса «воздух-воздух», позволяющие в зависимости от предстартового целеуказания осуществить самонаведение ракеты на самолет из состава их пары по его функциональному назначению по принципу «ведущий-ведомый».
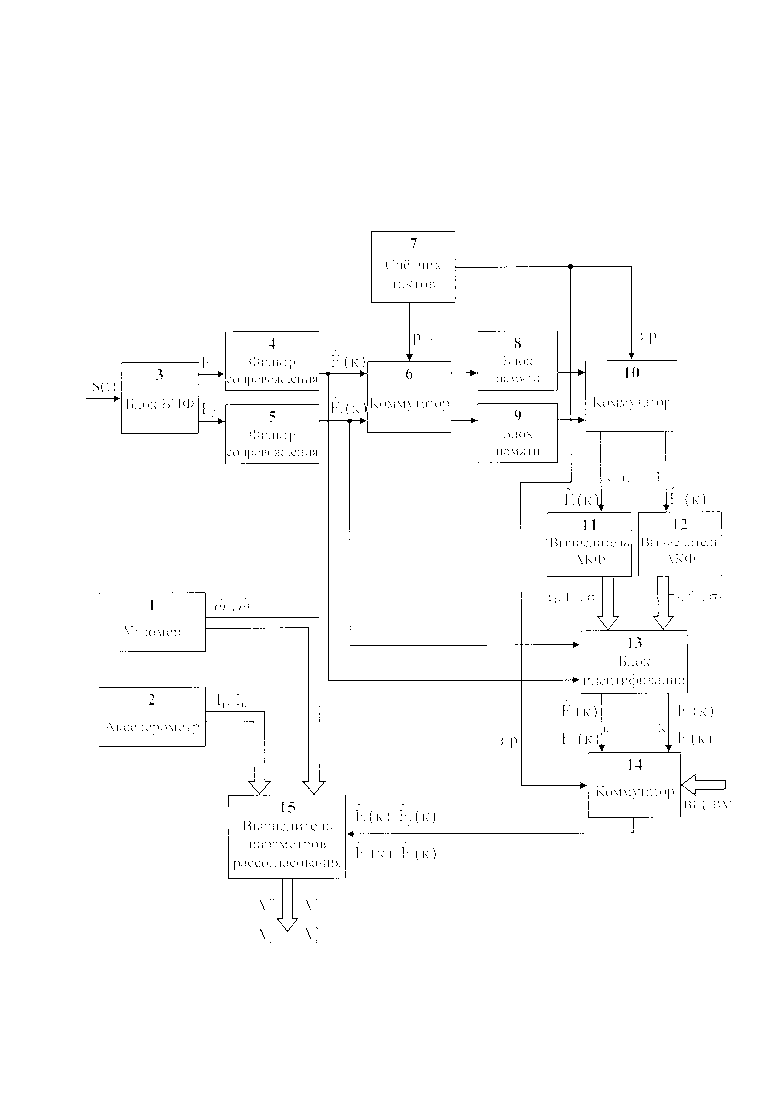
На чертеже приведена блок-схема, реализующая предлагаемый способ формирования параметров рассогласования в РЭСУ ракетой.
Предлагаемый способ реализуется следующим образом.
В угломере 1 РГС ракеты (чертеж) осуществляется измерение и получение оценки угловой скорости вращения линии визирования «ракета - не разрешаемая по угловым координатам пара самолетов» в горизонтальной  и вертикальной
и вертикальной  плоскостях.
плоскостях.
Одновременно с помощью акселерометра 2 осуществляется измерение собственного ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, которые подаются на соответствующие входы вычислителя 15 параметров рассогласования.
Одновременно в автоселекторе скорости РГС ракеты радиолокационный сигнал S(t), отраженный от пары самолетов, находящихся в главном луче диаграммы направленности антенны РГС, поступает на вход блока 3 БПФ с эквивалентной полосой пропускания его одного бина, равного единицам герц (осуществляется узкополосная доплеровская фильтрация). На его выходе каждом к-ом такте работы (к=1,…,I,…,К) формируются два отсчета доплеровских частот, обусловленных скоростями сближения ракеты с ведущим и ведомым самолетами пары, не разрешаемой по угловым координатам в угломере РГС ракеты, которые поступают на входы соответствующих фильтров 4 и 5 сопровождения. На их выходах формируются две оценки  и
и  траекторий доплеровских частот, которые поступают на соответствующие входы первого коммутатора 6 куда поступает с выхода счетчика 7 тактов работы разрешающий сигнал (индекс «р») для подачи оценок
траекторий доплеровских частот, которые поступают на соответствующие входы первого коммутатора 6 куда поступает с выхода счетчика 7 тактов работы разрешающий сигнал (индекс «р») для подачи оценок  и
и  на входы соответствующих блоков 8 и 9 памяти для их запоминания. Кроме того, с выхода счетчика 7 тактов работы запрещающие сигналы (индекс «з») поступают на входы второго 10 и третьего 14 коммутаторов для запрета соответственно вычисления АКФ с ее параметрами и поступления в зависимости от предстартового целеуказания оценки траектории доплеровской частоты на соответствующий вход вычислителя 15 параметров рассогласвания.
на входы соответствующих блоков 8 и 9 памяти для их запоминания. Кроме того, с выхода счетчика 7 тактов работы запрещающие сигналы (индекс «з») поступают на входы второго 10 и третьего 14 коммутаторов для запрета соответственно вычисления АКФ с ее параметрами и поступления в зависимости от предстартового целеуказания оценки траектории доплеровской частоты на соответствующий вход вычислителя 15 параметров рассогласвания.
При достижении количества тактов работы блока 3 БПФ, равного I, с выхода счетчика 7 тактов работы на вход первого коммутатора 6 поступает запрещающий сигнал для запоминания полученных оценок  и
и  (к=1,…,I) в блоках 8 и 9 памяти и разрешающие сигналы для второго 10 и третьего 14 коммутаторов. В результате запомненные оценки
(к=1,…,I) в блоках 8 и 9 памяти и разрешающие сигналы для второго 10 и третьего 14 коммутаторов. В результате запомненные оценки  и
и  (к=1,…,I) в блоках 8 и 9 памяти поступают на входы соответствующих вычислителей 11 и 12 АКФ с определением их параметров - время корреляции τ1 и τ2, собственная частота f01 и f02 АКФ, СКО σ1 и σ2 флюктуаций доплеровской частоты.
(к=1,…,I) в блоках 8 и 9 памяти поступают на входы соответствующих вычислителей 11 и 12 АКФ с определением их параметров - время корреляции τ1 и τ2, собственная частота f01 и f02 АКФ, СКО σ1 и σ2 флюктуаций доплеровской частоты.
Вычисленные значения параметров АКФ с выходов вычислителей 11 и 12 АКФ поступают на вход блока 13 идентификации, куда также поступают оценки  и
и  траекторий доплеровских частот с выходов фильтров 4 и 5 сопровождения.
траекторий доплеровских частот с выходов фильтров 4 и 5 сопровождения.
В основу идентификации траектории доплеровской частоты, обусловленной скоростью сближения ракеты, либо с ведущим, либо с ведомым самолетом пары положен следующий принцип. Так, при полете в составе пары если летчик ведущего (впереди летящего) самолета осуществляет стационарный полет, то летчик ведомого (сзади летящего) самолета дополнительно путем периодического «подруливания» осуществляет выдерживание заданных параметров пары (интервал, дистанция) полета самолетов в целом. Такое различие в пилотировании самолетов в составе пары накладывает соответствующий «отпечаток» на траекторные статистические характеристики траекторий доплеровских частот, обусловленные скоростями сближения ракеты с ведущим и ведомым самолетами пары, разрешаемые путем узкополосной доплеровской фильтрации по доплеровской частоте (скорости), которые (характеристики) являются параметрами (время корреляции, собственная частота АКФ, СКО флюктуации доплеровской частот) соответствующих АКФ траекторий доплеровских частот.
В результате, если в блоке 13 идентификации выполняется условие (5), то принимается решение о том, что оценка первой траектории доплеровской частоты  обусловлена скоростью сближения ракеты с ведущим самолетом пары, а оценка
обусловлена скоростью сближения ракеты с ведущим самолетом пары, а оценка  обусловлена скоростью сближения ракеты с ведомым самолетом пары. Идентифицированные таким образом оценки
обусловлена скоростью сближения ракеты с ведомым самолетом пары. Идентифицированные таким образом оценки  и
и  поступают на соответствующие входы третьего коммутатора 14, куда поступает также целеуказание о наведении ракеты на ведущего или ведомого самолета пары.
поступают на соответствующие входы третьего коммутатора 14, куда поступает также целеуказание о наведении ракеты на ведущего или ведомого самолета пары.
Так, если при выполнении условий (5) введено предстартовое целеуказание о наведении ракеты на ведущего самолета из состава пары, то на выходе третьего коммутатора 14 будет сформирована оценка  , которая поступает на соответствующий вход вычислителя 15 параметров рассогласования, в результате чего на его выходах формируются параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях в соответствии с выражениями (6) и (7). При предстартовом же целеуказании о наведении ракеты на ведомого самолета из состава пары на выходе третьего коммутатора 14 будет сформирована оценка
, которая поступает на соответствующий вход вычислителя 15 параметров рассогласования, в результате чего на его выходах формируются параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях в соответствии с выражениями (6) и (7). При предстартовом же целеуказании о наведении ракеты на ведомого самолета из состава пары на выходе третьего коммутатора 14 будет сформирована оценка  и параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях будут формироваться в соответствии с выражениями (8) и (9).
и параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях будут формироваться в соответствии с выражениями (8) и (9).
Если в блоке 13 идентификации выполняется условие (10), то принимается решение о том, что оценка первой траектории доплеровской частоты  обусловлена скоростью сближения ракеты с ведомым самолетом пары, а оценка
обусловлена скоростью сближения ракеты с ведомым самолетом пары, а оценка  обусловлена скоростью сближения ракеты с ведущим самолетом пары. Идентифицированные таким образом оценки
обусловлена скоростью сближения ракеты с ведущим самолетом пары. Идентифицированные таким образом оценки  и
и  также поступают на соответствующие входы третьего коммутатора 14, куда поступает целеуказание о наведении ракеты на ведущего или ведомого самолета пары.
также поступают на соответствующие входы третьего коммутатора 14, куда поступает целеуказание о наведении ракеты на ведущего или ведомого самолета пары.
Так, если при выполнении условий (10) введено предстартовое целеуказание о наведении ракеты на ведущего самолета из состава пары, то на выходе третьего коммутатора 14 будет сформирована оценка  , которая поступает на соответствующий вход вычислителя 15 параметров рассогласования, в результате чего на его выходах формируются параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях в соответствии с выражениями (11) и (12). При предстартовом же целеуказании о наведении ракеты на ведомого самолета из состава пары на выходе третьего коммутатора 14 будет сформирована оценка
, которая поступает на соответствующий вход вычислителя 15 параметров рассогласования, в результате чего на его выходах формируются параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях в соответствии с выражениями (11) и (12). При предстартовом же целеуказании о наведении ракеты на ведомого самолета из состава пары на выходе третьего коммутатора 14 будет сформирована оценка  и параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях будут формироваться в соответствии с выражениями (13) и (15).
и параметры рассогласования в РЭСУ ракетой в горизонтальной и вертикальной плоскостях будут формироваться в соответствии с выражениями (13) и (15).
Таким образом, применение предлагаемого изобретения позволит сформировать параметры рассогласования в РЭСУ ракетой класса «воздух-воздух», позволяющие осуществить самонаведение ракеты на самолет из состава их пары по его функциональному назначению по принципу «ведущий-ведомый».
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2003, стр. 30, формулы (7.51) (аналог).
2. Авиационные системы радиоуправления. Т.2. Радиоэлектронные системы самонаведения / Под ред. А.И. Канащенкова и В.И. Меркулова. - М.: Радиотехника, 2003, стр. 24, формула (7.32) (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ всеракурсного самонаведения ракеты "воздух-воздух" на заданный тип самолёта из состава их разнотипной пары | 2023 |
|
RU2805782C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на заданный тип самолёта с турбореактивным двигателем из состава их разнотипной пары | 2021 |
|
RU2758682C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на заданный тип самолёта с турбореактивным двигателем из состава их разнотипной пары при воздействии уводящих по скорости помех | 2022 |
|
RU2783734C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на вертолёт при различном характере его полёта | 2019 |
|
RU2726273C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ | 2006 |
|
RU2335730C2 |
| Способ функционирования активной радиолокационной головки самонаведения управляемой ракеты "воздух - воздух" при её самонаведении на вертолет и постановке им уводящих по дальности и скорости помех | 2024 |
|
RU2835459C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325306C1 |
| Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2802653C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| Способ комплексирования информации радиолокационной станции и радиолокационных головок самонаведения ракет, пущенных носителем по воздушной цели при воздействии уводящих по дальности и скорости помех | 2021 |
|
RU2765145C1 |
Изобретение относится к радиоэлектронным системам управления (РЭСУ) летательными аппаратами и может быть использовано для самонаведения ракеты класса «воздух-воздух» на самолет из состава их пары по его функциональному назначению по принципу «ведущий-ведомый». Технический результат – расширение функциональных возможностей на основе формирования параметров рассогласования в РЭСУ ракетой класса «воздух-воздух», позволяющих осуществить самонаведение ракеты на самолет из состава их пары по его функциональному назначению по принципу «ведущий-ведомый». Для этого способ заключается в измерении и получении в угломере радиолокационной головки самонаведения (РГС) ракеты угловой скорости вращения линии визирования «ракета-не разрешаемая по угловым координатам пара самолетов» в горизонтальной  и вертикальной
и вертикальной  плоскостях, измерении с помощью акселерометра собственного ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, осуществлении в автоселекторе скорости РГС ракеты узкополосной доплеровской фильтрации на основе алгоритма быстрого преобразования Фурье, формировании оценок
плоскостях, измерении с помощью акселерометра собственного ускорения ракеты в горизонтальной Jг и вертикальной Jв плоскостях, осуществлении в автоселекторе скорости РГС ракеты узкополосной доплеровской фильтрации на основе алгоритма быстрого преобразования Фурье, формировании оценок  и
и  траекторий доплеровских частот, обусловленных скоростями сближения ракеты с ведущим и ведомым самолетами пары, вычислении автокорреляционных функций и их параметров - времени корреляции τ1 и τ2, собственной частоты f01 и f02 автокорреляционной функции, среднеквадратического отклонения σ1 и σ2 флюктуаций доплеровской частоты, анализе параметров автокорреляционных функций, при выполнении условий
траекторий доплеровских частот, обусловленных скоростями сближения ракеты с ведущим и ведомым самолетами пары, вычислении автокорреляционных функций и их параметров - времени корреляции τ1 и τ2, собственной частоты f01 и f02 автокорреляционной функции, среднеквадратического отклонения σ1 и σ2 флюктуаций доплеровской частоты, анализе параметров автокорреляционных функций, при выполнении условий

принимается решение о том, что оценка  обусловлена скоростью сближения ракеты с ведущим самолетом пары, а оценка
обусловлена скоростью сближения ракеты с ведущим самолетом пары, а оценка  обусловлена скоростью сближения ракеты с ведомым самолетом пары, в этом случае при предстартовом целеуказании (ЦУ) о наведении ракеты на ведущего самолета параметры рассогласования в РЭСУ в горизонтальной Δгвщ и вертикальной Δввщ плоскостях будут формироваться в соответствии с выражениями
обусловлена скоростью сближения ракеты с ведомым самолетом пары, в этом случае при предстартовом целеуказании (ЦУ) о наведении ракеты на ведущего самолета параметры рассогласования в РЭСУ в горизонтальной Δгвщ и вертикальной Δввщ плоскостях будут формироваться в соответствии с выражениями


где λ - рабочая длина волны РГС ракеты; N - навигационная постоянная, при предстартовом ЦУ о наведении ракеты на ведомый самолет параметры рассогласования формируются в соответствии с выражениями


при выполнении условий

принимается решение о том, что оценка  обусловлена скоростью сближения ракеты с ведомым самолетом пары, а оценка
обусловлена скоростью сближения ракеты с ведомым самолетом пары, а оценка  обусловлена скоростью сближения ракеты с ведущим самолетом пары и при предстартовом ЦУ о наведении ракеты на ведущий самолет параметры рассогласования формируются в соответствии с выражениями
обусловлена скоростью сближения ракеты с ведущим самолетом пары и при предстартовом ЦУ о наведении ракеты на ведущий самолет параметры рассогласования формируются в соответствии с выражениями


а при предстартовом ЦУо наведении ракеты на ведомый самолет из состава пары параметры рассогласования формируются в соответствии с выражениями

 1 ил.
1 ил.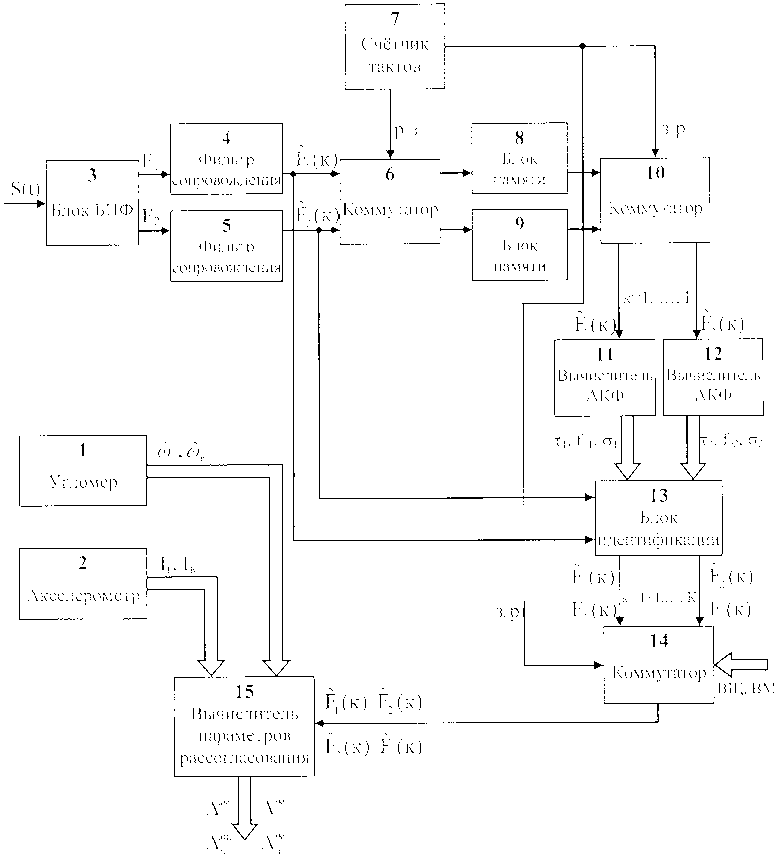
Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса «воздух-воздух» при ее самонаведении на самолет из состава их пары по его функциональному назначению по принципу «ведущий-ведомый», заключающийся в том, что в угломере радиолокационной головки самонаведения ракеты осуществляется измерение и получение оценки угловой скорости вращения линии визирования «ракета-не разрешаемая по угловым координатам пара самолетов» в горизонтальной  и вертикальной
и вертикальной  плоскостях, с помощью акселерометра измеряется собственное ускорение ракеты в горизонтальной JГ и вертикальной JB плоскостях, отличающийся тем, что в автоселекторе скорости радиолокационной головки самонаведения ракеты путем узкополосной доплеровской фильтрации на основе алгоритма быстрого преобразования Фурье на каждом к-м такте его работы, к=1,…I,…,К, где К - общее количество тактов работы алгоритма быстрого преобразования Фурье; I - количество тактов работы алгоритма быстрого преобразования Фурье, при достижении которого осуществляется вычисление автокорреляционных функций оценок траекторий доплеровских частот, формируются два отсчета доплеровских частот, обусловленных скоростями сближения ракеты с ведущим и ведомым самолетами пары, не разрешаемой по угловым координатам в угломере радиолокационной головки самонаведения ракеты, путем фильтрации в соответствующих двух фильтрах сопровождения двух отсчетов доплеровских частот осуществляется формирование и запоминание значений двух оценок
плоскостях, с помощью акселерометра измеряется собственное ускорение ракеты в горизонтальной JГ и вертикальной JB плоскостях, отличающийся тем, что в автоселекторе скорости радиолокационной головки самонаведения ракеты путем узкополосной доплеровской фильтрации на основе алгоритма быстрого преобразования Фурье на каждом к-м такте его работы, к=1,…I,…,К, где К - общее количество тактов работы алгоритма быстрого преобразования Фурье; I - количество тактов работы алгоритма быстрого преобразования Фурье, при достижении которого осуществляется вычисление автокорреляционных функций оценок траекторий доплеровских частот, формируются два отсчета доплеровских частот, обусловленных скоростями сближения ракеты с ведущим и ведомым самолетами пары, не разрешаемой по угловым координатам в угломере радиолокационной головки самонаведения ракеты, путем фильтрации в соответствующих двух фильтрах сопровождения двух отсчетов доплеровских частот осуществляется формирование и запоминание значений двух оценок  и
и  траекторий доплеровских частот, при достижении количества тактов работы алгоритма быстрого преобразования Фурье, равного I, вычисляются две автокорреляционные функции для соответствующих двух оценок траекторий доплеровских частот и определяются параметры первой автокорреляционной функции, вычисленной по первой оценке
траекторий доплеровских частот, при достижении количества тактов работы алгоритма быстрого преобразования Фурье, равного I, вычисляются две автокорреляционные функции для соответствующих двух оценок траекторий доплеровских частот и определяются параметры первой автокорреляционной функции, вычисленной по первой оценке  траектории доплеровской частоты - время корреляции τ1, собственная частота f01 автокорреляционной функции и среднеквадратическое отклонение σ1 флюктуаций доплеровской частоты и параметры второй автокорреляционной функции, вычисленной по второй оценке
траектории доплеровской частоты - время корреляции τ1, собственная частота f01 автокорреляционной функции и среднеквадратическое отклонение σ1 флюктуаций доплеровской частоты и параметры второй автокорреляционной функции, вычисленной по второй оценке  траектории доплеровской частоты - время корреляции τ2, собственная частота f02 автокорреляционной функции и среднеквадратическое отклонение σ2 флюктуаций доплеровской частоты, осуществляется анализ параметров автокорреляционных функций, при выполнении условий
траектории доплеровской частоты - время корреляции τ2, собственная частота f02 автокорреляционной функции и среднеквадратическое отклонение σ2 флюктуаций доплеровской частоты, осуществляется анализ параметров автокорреляционных функций, при выполнении условий

принимается решение о том, что оценка первой траектории доплеровской частоты  обусловлена скоростью сближения ракеты с ведущим самолетом пары, а оценка
обусловлена скоростью сближения ракеты с ведущим самолетом пары, а оценка  обусловлена скоростью сближения ракеты с ведомым самолетом пары, в этом случае при предстартовом целеуказании о наведении ракеты на ведущий самолет из состава пары параметры рассогласования в радиоэлектронной системе управления ракетой в горизонтальной Δгвщ и вертикальной Δввщ плоскостях после I тактов работы алгоритма быстрого преобразования Фурье будут формироваться в соответствии с выражениями
обусловлена скоростью сближения ракеты с ведомым самолетом пары, в этом случае при предстартовом целеуказании о наведении ракеты на ведущий самолет из состава пары параметры рассогласования в радиоэлектронной системе управления ракетой в горизонтальной Δгвщ и вертикальной Δввщ плоскостях после I тактов работы алгоритма быстрого преобразования Фурье будут формироваться в соответствии с выражениями


где
λ - рабочая длина волны радиолокационной головки самонаведения ракеты;
N - навигационная постоянная,
при предстартовом целеуказании о наведении ракеты на ведомый самолет из состава пары параметры рассогласования в радиоэлектронной системе управления ракетой в горизонтальной Δгвм и вертикальной Δввм плоскостях после I тактов работы алгоритма быстрого преобразования Фурье будут формироваться в соответствии с выражениями


при выполнении условий

принимается решение о том, что оценка первой траектории доплеровской частоты  обусловлена скоростью сближения ракеты с ведомым самолетом пары, а оценка
обусловлена скоростью сближения ракеты с ведомым самолетом пары, а оценка  обусловлена скоростью сближения ракеты с ведущим самолетом пары, в этом случае при предстартовом целеуказании о наведении ракеты на ведущий самолет из состава пары параметры рассогласования в радиоэлектронной системе управления ракетой в горизонтальной Δгвщ и вертикальной Δввщ плоскостях после I тактов работы алгоритма быстрого преобразования Фурье будут формироваться в соответствии с выражениями
обусловлена скоростью сближения ракеты с ведущим самолетом пары, в этом случае при предстартовом целеуказании о наведении ракеты на ведущий самолет из состава пары параметры рассогласования в радиоэлектронной системе управления ракетой в горизонтальной Δгвщ и вертикальной Δввщ плоскостях после I тактов работы алгоритма быстрого преобразования Фурье будут формироваться в соответствии с выражениями


при предстартовом целеуказании о наведении ракеты на ведомый самолет из состава пары параметры рассогласования в радиоэлектронной системе управления ракетой в горизонтальной Δг и вертикальной Δв плоскостях после I тактов работы алгоритма быстрого преобразования Фурье будут формироваться в соответствии с выражениями


| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ ДВУХКАНАЛЬНОЙ РАКЕТОЙ | 2005 |
|
RU2282816C1 |
| КУЗОВКОВ Н.Т | |||
| Системы стабилизации летательных аппаратов | |||
| - М.: Высшая школа, 1976, с.236-238 | |||
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2011 |
|
RU2465535C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ОРИЕНТИРУЕМОЙ РАКЕТОЙ ПОСРЕДСТВОМ ПРИВОДА, СЛЕДЯЩЕГО ЗА ОРИЕНТАЦИЕЙ ТРАЕКТОРИИ | 2003 |
|
RU2323464C2 |
| СПОСОБ МНОГОМЕРНОГО ТРАЕКТОРНОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2306581C1 |

