Изобретение относится к области радиоэлектронных систем управления (РЭСУ) ракет «воздух - воздух» с активной радиолокационной головкой самонаведения (АРГС) и может быть использовано для повышения эффективности самонаведения ракеты на вертолет при постановке им уводящих по дальности и скорости помех.
Известен способ функционирования информационно-вычислительной системы ракеты (АРГС), который может быть применен и при наведении на вертолет, заключающийся в том, что осуществляется подготовка ракеты на борту самолета-носителя к автономной работе путем подачи питающих напряжений из аппаратуры истребителя, измерение параметров движения вертолета и собственного движения ракеты, формирование оценок необходимых параметров относительного движения вертолета и абсолютного движения ракеты, выбор метода наведения ракеты, наилучшего по какому-либо критерию для данных условий применения, вычисление для выбранного метода параметров рассогласования, характеризующих степень несоответствия действительных параметров движения ракеты их требуемым значениям, формирование сигнала подготовки и управления для радиовзрывателя. Также осуществляется излучение и прием электромагнитных колебаний путем сканирования узким лучом в заданном секторе, относительно оси ракеты. При подлете ракеты к вертолету на расстояние, когда он становится размерным, выделяют из полосы спектра отраженного от вертолета сигнала полосы частот, соответствующие частотам колебаний элементов конструкции вертолета, определяют в этой полосе частот величину максимальной амплитуды отраженного сигнала. Далее фиксируют излучение и прием электромагнитных колебаний в заданном относительно оси ракеты направлении, распознают элемент конструкции вертолета, имеющий максимальную амплитуду вибрации. При совмещении фиксированного луча электромагнитных колебаний с данным элементом конструкции формируют сигнал на подрыв боевой части ракеты по сигналу положения вертолета относительно оси ракеты и сигналу опознавания [1].
Недостатком данного способа функционирования информационно-вычислительной системы ракеты (АРГС) является низкая эффективность самонаведения ракеты «воздух - воздух» на вертолет при постановке им уводящих по скорости и дальности помех.
Известен способ функционирования АРГС управляемой ракеты «воздух - воздух», который может быть использован и при наведении на вертолет, заключающийся в том, что, передатчик АРГС формирует квазинепрерывный, смодулированный зондирующий сигнал, который через антенну головного канала излучается в направлении на вертолет, отраженный от вертолета радиолокационный (РЛ) сигнал через антенну головного канала поступает в приемник, где усиливается, преобразуется на промежуточную частоту и поступает на входы блока быстрого преобразования Фурье (БПФ), в котором преобразуется в амплитудно-частотный спектр (АЧС) S(ƒ), а так же дальномера, автоселектора скорости и угломера, где на каждом k-м такте работы АРГС (где k=1, …, K; K - общее количество отсчетов дискретного времени) измеряются и оцениваются: в дальномере - текущая дальность  между ракетой и вертолетом, дальности между ракетой и вертолетом в момент начала
между ракетой и вертолетом, дальности между ракетой и вертолетом в момент начала  и окончания
и окончания  самонаведения, в автоселекторе скорости - доплеровская частота, обусловленная скоростью сближения ракеты с вертолетом
самонаведения, в автоселекторе скорости - доплеровская частота, обусловленная скоростью сближения ракеты с вертолетом  в угломере - угол относительно линии визирования «ракета - вертолет» в вертикальной
в угломере - угол относительно линии визирования «ракета - вертолет» в вертикальной  плоскости, угловые скорости вращения линии визирования «ракета - вертолет» в вертикальной
плоскости, угловые скорости вращения линии визирования «ракета - вертолет» в вертикальной  и горизонтальной
и горизонтальной  плоскостях, в акселерометре ракеты оцениваются собственные ускорения ракеты в вертикальной
плоскостях, в акселерометре ракеты оцениваются собственные ускорения ракеты в вертикальной  и горизонтальной
и горизонтальной  плоскостях, вычисляются оценки ускорений вертолета в вертикальной
плоскостях, вычисляются оценки ускорений вертолета в вертикальной  и горизонтальной
и горизонтальной  плоскостях в соответствии с выражениями [2]
плоскостях в соответствии с выражениями [2]

где  - производные угловых скоростей в вертикальной и горизонтальной плоскостях соответственно; λ - рабочая длина волны АРГС, вычисляются оценки параметров рассогласования в вертикальной
- производные угловых скоростей в вертикальной и горизонтальной плоскостях соответственно; λ - рабочая длина волны АРГС, вычисляются оценки параметров рассогласования в вертикальной  и горизонтальной
и горизонтальной  плоскостях в соответствии с выражениями
плоскостях в соответствии с выражениями
в соответствии с которыми осуществляется самонаведение ракеты на вертолет [3].
Недостатком данного способа функционирования АРГС ракеты «воздух - воздух» является низкая эффективность ее самонаведения на вертолет при постановке им уводящих по дальности и скорости помех. Это обусловлено тем, что постановка вертолетом уводящих по дальности и скорости помех приведет к недостоверному формированию оценок дальности  и доплеровской частоты
и доплеровской частоты  используемых для вычисления оценок ускорений вертолета
используемых для вычисления оценок ускорений вертолета  в соответствии с выражениями (1) и (2), что приведет к ошибочному вычислению
в соответствии с выражениями (1) и (2), что приведет к ошибочному вычислению  в вычислении которых дополнительно будут использованы недостоверные оценки
в вычислении которых дополнительно будут использованы недостоверные оценки  в соответствии с выражениями (3), (4), что существенно снизит эффективность самонаведения ракеты на вертолет в целом.
в соответствии с выражениями (3), (4), что существенно снизит эффективность самонаведения ракеты на вертолет в целом.
Цель изобретения - повышение эффективности самонаведения ракеты «воздух - воздух» с АРГС на вертолет при постановке им уводящих по дальности и скорости помех.
Для достижения цели в способе функционирования АРГС управляемой ракеты «воздух - воздух», заключающемся в том, что передатчик АРГС формирует квазинепрерывный, немодулированный зондирующий сигнал, который через антенну излучается в направлении на вертолет, отраженный от вертолета РЛ сигнал через антенну поступает в приемник, где усиливается, преобразуется на промежуточную частоту и поступает на входы дальномера, угломера и автоселектора скорости, где измеряются и оцениваются: в дальномере -  в угломере -
в угломере -  в автоселекторе скорости -
в автоселекторе скорости -  в акселерометре ракеты оцениваются
в акселерометре ракеты оцениваются  Оценки ускорений вертолета в вертикальной
Оценки ускорений вертолета в вертикальной и горизонтальной
и горизонтальной  плоскостях вычисляются в соответствии с выражениями (1), (2), вычисляются оценки параметров рассогласования
плоскостях вычисляются в соответствии с выражениями (1), (2), вычисляются оценки параметров рассогласования  и
и  в соответствии с выражениями (3), (4), дополнительно, в бортовой радиолокационной станции (БРЛС) носителя ракеты, с которого был произведен ее пуск, вычисляется относительно земной поверхности оценка текущей высоты полета ракеты
в соответствии с выражениями (3), (4), дополнительно, в бортовой радиолокационной станции (БРЛС) носителя ракеты, с которого был произведен ее пуск, вычисляется относительно земной поверхности оценка текущей высоты полета ракеты  а также оценки высоты полета ракеты в момент начала
а также оценки высоты полета ракеты в момент начала  и окончания
и окончания  ее самонаведения, в соответствии с выражениями
ее самонаведения, в соответствии с выражениями
где  - текущая оценка высоты полета носителя ракеты относительно земной поверхности;
- текущая оценка высоты полета носителя ракеты относительно земной поверхности;
 - оценка высоты полета носителя ракеты относительно земной поверхности в момент начала и окончания самонаведения соответственно;
- оценка высоты полета носителя ракеты относительно земной поверхности в момент начала и окончания самонаведения соответственно;
 - текущая оценка дальности «носитель - ракета»;
- текущая оценка дальности «носитель - ракета»;
 - оценка дальности «носитель - ракета» в момент начала и окончания самонаведения соответственно;
- оценка дальности «носитель - ракета» в момент начала и окончания самонаведения соответственно;
 - текущая оценка угла относительно линии визирования «носитель - ракета» в вертикальной плоскости;
- текущая оценка угла относительно линии визирования «носитель - ракета» в вертикальной плоскости;
 - оценка углов относительно линии визирования «носитель - ракета» в вертикальной плоскости в момент начала и окончания соответственно,
- оценка углов относительно линии визирования «носитель - ракета» в вертикальной плоскости в момент начала и окончания соответственно,
которые по каналу связи «носитель - ракета» передаются в АРГС через ее антенну хвостового канала, в АРГС вычисляются оценки текущей дальности между ракетой и земной поверхностью в направлении на вертолет  дальности между ракетой и земной поверхностью в направлении на вертолет в момент начала
дальности между ракетой и земной поверхностью в направлении на вертолет в момент начала  и окончания
и окончания  ее самонаведения в соответствии с выражениями
ее самонаведения в соответствии с выражениями
где  - оценка угла относительно линии визирования «ракета - вертолет» в вертикальной плоскости в момент начала и окончания ее самонаведения соответственно,
- оценка угла относительно линии визирования «ракета - вертолет» в вертикальной плоскости в момент начала и окончания ее самонаведения соответственно,
вычисляется отсчет доплеровской частоты FЛ, соответствующий энергетическому центру отражений РЛ сигнала от наступающей лопасти несущего винта вертолета, в соответствии с выражением

где М{…} - операция математического ожидания;
Fi и Ai - соответственно i-я доплеровская частота и амплитуда спектральной составляющей, соответствующая отражениям РЛ сигнала от наступающей лопасти несущего винта вертолета;
I=1, …, I; I - общее количество доплеровских частот и амплитуд спектральных составляющих, соответствующих отражениям РЛ сигнала от наступающей лопасти несущего винта вертолета,
затем определяется оценка доплеровской частоты  вычисляются производные оценки дальности до вертолета
вычисляются производные оценки дальности до вертолета  и доплеровских частот
и доплеровских частот  вычисляются следующие модули разностей, которые сравниваются с пороговыми значениями ε1, ε2, ε3, близкими к нулю
вычисляются следующие модули разностей, которые сравниваются с пороговыми значениями ε1, ε2, ε3, близкими к нулю
осуществляется идентификация воздействия или отсутствия воздействия уводящих по дальности и скорости помех на основе анализа выполнения или не выполнения условий (12), (13), (14) и, в зависимости от результата идентификации, осуществляется вычисление оценок ускорений вертолета в вертикальной  и горизонтальной
и горизонтальной  плоскостях, а также параметров рассогласования
плоскостях, а также параметров рассогласования  так, если одновременно выполняются условия (12), (13) и (14), что соответствует отсутствию воздействия уводящих по дальности и скорости помех, то оценки ускорения вертолета
так, если одновременно выполняются условия (12), (13) и (14), что соответствует отсутствию воздействия уводящих по дальности и скорости помех, то оценки ускорения вертолета  вычисляются в соответствии с выражениями (1), (2), а вычисление параметров рассогласования
вычисляются в соответствии с выражениями (1), (2), а вычисление параметров рассогласования  осуществляется в соответствии с выражениями (3) и (4), если не выполняются условия (12), (13) и выполняется условие (14), что соответствует постановке вертолетом уводящей по дальности помехи, то оценки ускорений вертолета
осуществляется в соответствии с выражениями (3) и (4), если не выполняются условия (12), (13) и выполняется условие (14), что соответствует постановке вертолетом уводящей по дальности помехи, то оценки ускорений вертолета 
 вычисляются в соответствии с выражениями
вычисляются в соответствии с выражениями

а параметры рассогласования  вычисляются в соответствии с выражениями
вычисляются в соответствии с выражениями
если не выполняются условия (12), (14) и выполняется условие (13), что соответствует постановке вертолетом уводящей по скорости помехи, то оценки ускорений вертолета  вычисляются в соответствии с выражениями
вычисляются в соответствии с выражениями
а параметры рассогласования  вычисляются в соответствии с выражениями
вычисляются в соответствии с выражениями


если одновременно не выполняются условия (12), (13) и (14), что соответствует постановке вертолетом одновременно уводящих по дальности и скорости помех, то оценки ускорений вертолета  вычисляются в соответствии с выражениями
вычисляются в соответствии с выражениями
а параметры рассогласования  вычисляются в соответствии с выражениями
вычисляются в соответствии с выражениями
Новыми признаками, обладающими существенными отличиями, являются.
1. Вычисление в БРЛС носителя ракеты оценок текущей высоты полета ракеты  высоты полета ракеты в момент начала
высоты полета ракеты в момент начала  и окончания
и окончания  ее самонаведения, в соответствии с выражениями (5), (6), (7) соответственно.
ее самонаведения, в соответствии с выражениями (5), (6), (7) соответственно.
2. Вычисление в АРГС оценок текущей дальности между ракетой и земной поверхностью в направлении на вертолет  дальности между ракетой и земной поверхностью в направлении на вертолет в момент начала
дальности между ракетой и земной поверхностью в направлении на вертолет в момент начала  и окончания
и окончания  ее самонаведения, в соответствии с выражениями (8), (9), (10) соответственно.
ее самонаведения, в соответствии с выражениями (8), (9), (10) соответственно.
3. Определение отсчета доплеровской частоты FЛ соответствующей энергетическому центру отражений РЛ сигнала от наступающей лопасти несущего винта вертолета в соответствии с выражением (11), а затем оценки доплеровской частоты 
4. Идентификация уводящих по скорости и дальности помех по результатам выполнения или не выполнения условий (12), (13) и (14).
5. Вычисление оценок ускорений вертолета  и параметров рассогласования
и параметров рассогласования  в зависимости от результата идентификации воздействия или отсутствия воздействия уводящих по дальности и скорости помех в соответствии с выражениями (3), (4), (15), (16), (19), (20), (23), (24) и (1), (2), (17), (18), (21), (22), (25), (26) соответственно.
в зависимости от результата идентификации воздействия или отсутствия воздействия уводящих по дальности и скорости помех в соответствии с выражениями (3), (4), (15), (16), (19), (20), (23), (24) и (1), (2), (17), (18), (21), (22), (25), (26) соответственно.
Данные признаки обладают существенными отличиями, так как в известных способах не обнаружены.
Применение новых признаков в совокупности с известными позволит идентифицировать воздействие или отсутствие воздействия уводящих по дальности и скорости помех, и, тем самым, повысить эффективность наведения ракеты «воздух - воздух» с АРГС на вертолет при постановке им данных помех.
На фиг. 1 приведена блок-схема АРГС, поясняющая предлагаемый способ ее функционирования, на фиг. 2(а,б), 3 - эпюры, поясняющие процесс формирования оценок, на фиг. 4, 5 - эпюры, поясняющие воздействие уводящих соответственно по дальности и скорости помех.
Способ функционирования АРГС ракеты «воздух - воздух» реализуется следующим образом.
В передатчике 1 АРГС (фиг. 1) формируется квазинепрерывный, немодулированный зондирующий сигнал, который поступает на вход антенны 2 головного канала АРГС и излучается в направлении на вертолет.
Отраженный от вертолета РЛ сигнал S(t) через антенну 2 головного канала АРГС поступает на вход приемника 3, где усиливается, преобразуется на промежуточную частоту и одновременно поступает на входы блока 4 БПФ, дальномера 5, автоселектора скорости 6 и угломера 7.
В блоке 4 БПФ сигнал S(t) преобразуется в АЧС S(ƒ) (фиг. 2а), спектральные составляющие которого обусловлены отражениями РЛ сигнала от фюзеляжа вертолета и наступающих лопастей его несущего винта, выделяется область доплеровских частот, обусловленных отражениями РЛ сигнала от наступающих лопастей несущего винта вертолета. В выделенной области доплеровских частот путем пороговой обработки АЧС S(ƒ) РЛ сигнала (порог UП превысили амплитуды спектральных составляющих А1-А6) выделяются (фиг. 2б) соответствующие отсчеты доплеровских частот F1-F6, по которым в соответствии с выражением (11) вычисляется (фиг. 2б) отсчет FЛ, а затем формируется оценка доплеровской частоты  соответствующая энергетическому центру отражений РЛ сигнала от наступающих лопастей несущего винта вертолета.
соответствующая энергетическому центру отражений РЛ сигнала от наступающих лопастей несущего винта вертолета.
Измеряются и оцениваются: в дальномере 5 - текущая дальность  между ракетой и вертолетом, дальности ((на фиг. 3 показаны ситуации только начала и окончания самонаведения ракеты) между ракетой и вертолетом в момент начала
между ракетой и вертолетом, дальности ((на фиг. 3 показаны ситуации только начала и окончания самонаведения ракеты) между ракетой и вертолетом в момент начала  и окончания
и окончания  самонаведения; в автоселекторе скорости 6 - доплеровская частота, обусловленная скоростью сближения ракеты с вертолетом
самонаведения; в автоселекторе скорости 6 - доплеровская частота, обусловленная скоростью сближения ракеты с вертолетом  в угломере 7 - угол относительно линии визирования «ракета - вертолет» в вертикальной
в угломере 7 - угол относительно линии визирования «ракета - вертолет» в вертикальной  плоскости, углы относительно линии визирования «ракета - вертолет» в вертикальной плоскости в момент начала
плоскости, углы относительно линии визирования «ракета - вертолет» в вертикальной плоскости в момент начала  и окончания
и окончания  самонаведения соответственно, угловые скорости вращения линии визирования «ракета - вертолет» в вертикальной
самонаведения соответственно, угловые скорости вращения линии визирования «ракета - вертолет» в вертикальной  и горизонтальной
и горизонтальной  плоскостях.
плоскостях.
Одновременно в акселерометре ракеты 8 (фиг. 1) оцениваются собственные ускорения ракеты в вертикальной  и горизонтальной
и горизонтальной  плоскостях.
плоскостях.
В БРЛС носителя 9, с которого был произведен пуск ракеты, вычисляется относительно земной поверхности (фиг. 3) оценка текущей высоты полета ракеты  а также оценки высоты полета ракеты в момент начала
а также оценки высоты полета ракеты в момент начала  и окончания
и окончания  ее самонаведения, в соответствии с выражениями (5), (6) и (7).
ее самонаведения, в соответствии с выражениями (5), (6) и (7).
Оценки углов  (фиг. 1) с первой группы выходов 10 угломера 7 поступают на первую группу входов 11 первого вычислителя 12, на вторую группу входов 13 которого, по каналу связи «носитель - ракета» через антенну 14 хвостового канала подаются оценки
(фиг. 1) с первой группы выходов 10 угломера 7 поступают на первую группу входов 11 первого вычислителя 12, на вторую группу входов 13 которого, по каналу связи «носитель - ракета» через антенну 14 хвостового канала подаются оценки 
В первом вычислителе 12 осуществляется вычисление оценок (фиг. 3) текущей дальности между ракетой и земной поверхностью в направлении на вертолет  дальности между ракетой и земной поверхностью в направлении на вертолет в момент начала
дальности между ракетой и земной поверхностью в направлении на вертолет в момент начала  (дальность между ракетой и точкой Т1) и окончания
(дальность между ракетой и точкой Т1) и окончания  (дальность между ракетой и точкой Т2) ее самонаведения в соответствии с выражениями (8), (9) и (10).
(дальность между ракетой и точкой Т2) ее самонаведения в соответствии с выражениями (8), (9) и (10).
Оценки доплеровской частоты  (фиг. 1) с выхода блока 4 БПФ, дальности
(фиг. 1) с выхода блока 4 БПФ, дальности  из группы выходов дальномера 5 и доплеровской частоты
из группы выходов дальномера 5 и доплеровской частоты  с выхода автоселектора скорости 6 поступают соответственно на первый 15, второй 16 и третий 17 входы блока 18 дифференцирования, на группе выходов которого формируются соответствующие производные оценок
с выхода автоселектора скорости 6 поступают соответственно на первый 15, второй 16 и третий 17 входы блока 18 дифференцирования, на группе выходов которого формируются соответствующие производные оценок  Полученные производные оценок с группы выходов блока 18 дифференцирования поступают на первую группу входов 19 анализатора 20, на второй вход 21 которого поступает оценка
Полученные производные оценок с группы выходов блока 18 дифференцирования поступают на первую группу входов 19 анализатора 20, на второй вход 21 которого поступает оценка  из группы выходов дальномера 5, а на третий вход 22 - оценка
из группы выходов дальномера 5, а на третий вход 22 - оценка  из группы выходов первого вычислителя 12.
из группы выходов первого вычислителя 12.
В анализаторе 20 на основе анализа выполнения или невыполнения условий (12), (13) и (14) осуществляется принятие решения о воздействии или не воздействии уводящих по дальности и скорости помех. В результате анализа на его группе выходов формируются разрешающие или запрещающие сигналы, которые поступают на первую группу входов 23 коммутатора 24, на вторую группу входов 25, третий вход 26, четвертую группу входов 27, пятый 28 и шестой 29 вход которого, поступают соответственно оценки  - с группы выходов первого вычислителя 12,
- с группы выходов первого вычислителя 12,  - с выхода автоселектора скорости 6,
- с выхода автоселектора скорости 6, 
 - с группы выходов дальномера 5,
- с группы выходов дальномера 5,  из группы выходов блока 18 дифференцирования и
из группы выходов блока 18 дифференцирования и  с выхода блока 4 БПФ.
с выхода блока 4 БПФ.
Оценки угловых скоростей линии визирования «ракета - вертолет» в вертикальной  и горизонтальной
и горизонтальной  плоскостях со второй группы выходов 30 угломера 7 поступают на объединенные первые группы входов 31 и 32 соответственно второго вычислителя 33 и вычислителя 34 параметров рассогласования. На объединенные вторые группы 35 и 36 входов второго вычислителя 33 и вычислителя 34 параметров рассогласования соответственно поступают оценки собственного ускорения ракеты в вертикальной
плоскостях со второй группы выходов 30 угломера 7 поступают на объединенные первые группы входов 31 и 32 соответственно второго вычислителя 33 и вычислителя 34 параметров рассогласования. На объединенные вторые группы 35 и 36 входов второго вычислителя 33 и вычислителя 34 параметров рассогласования соответственно поступают оценки собственного ускорения ракеты в вертикальной  и горизонтальной
и горизонтальной  плоскостях с группы выходов акселерометра 8.
плоскостях с группы выходов акселерометра 8.
Если в анализаторе 20 одновременно выполняются условия (12), (13) и (14), что соответствует отсутствию воздействия уводящих по дальности и скорости помех, то на группе выходов коммутатора 24 формируются разрешающие сигналы для прохождения оценок  на третью группу входов 37 второго вычислителя 33 и оценок
на третью группу входов 37 второго вычислителя 33 и оценок  - на третью группу входов 38 вычислителя 34 параметров рассогласования. В результате оценки ускорения вертолета
- на третью группу входов 38 вычислителя 34 параметров рассогласования. В результате оценки ускорения вертолета  вычисляются во втором вычислителе 33 в соответствии с выражениями (1) и (2), которые поступают на четвертую группу входов 39 вычислителя 34 параметров рассогласования, где осуществляется вычисление параметров рассогласования
вычисляются во втором вычислителе 33 в соответствии с выражениями (1) и (2), которые поступают на четвертую группу входов 39 вычислителя 34 параметров рассогласования, где осуществляется вычисление параметров рассогласования  в соответствии с выражениями (3) и (4).
в соответствии с выражениями (3) и (4).
Если в анализаторе 20 одновременно не выполняются условия (12), (13) и выполняется условие (14), что соответствует постановке вертолетом уводящей по дальности помехи (фиг. 4, момент времени t1), то на группе выходов коммутатора 24 формируются разрешающие сигналы для прохождения оценок  на третью группу входов 37 второго вычислителя 33 и оценок
на третью группу входов 37 второго вычислителя 33 и оценок  - на третью группу входов 38 вычислителя 34 параметров рассогласования. В результате оценки ускорения вертолета
- на третью группу входов 38 вычислителя 34 параметров рассогласования. В результате оценки ускорения вертолета  вычисляются во втором вычислителе 33 в соответствии с выражениями (15) и (16), которые поступают на четвертую группу входов 39 вычислителя 34 параметров рассогласования, где осуществляется вычисление параметров рассогласования
вычисляются во втором вычислителе 33 в соответствии с выражениями (15) и (16), которые поступают на четвертую группу входов 39 вычислителя 34 параметров рассогласования, где осуществляется вычисление параметров рассогласования  в соответствии с выражениями (17) и (18).
в соответствии с выражениями (17) и (18).
Если в анализаторе 20 одновременно не выполняются условия (12), (14) и выполняется условие (13), что соответствует постановке вертолетом уводящей по скорости помехи (фиг. 5, момент времени t1), то на группе выходов коммутатора 24 формируются разрешающие сигналы для прохождения оценок  на третью группу входов 37 второго вычислителя 33 и оценок
на третью группу входов 37 второго вычислителя 33 и оценок  - на третью группу входов 38 вычислителя 34 параметров рассогласования. В результате оценки ускорения вертолета
- на третью группу входов 38 вычислителя 34 параметров рассогласования. В результате оценки ускорения вертолета  вычисляются во втором вычислителе 33 в соответствии с выражениями (19) и (20), которые поступают на четвертую группу входов 39 вычислителя 34 параметров рассогласования, где осуществляется вычисление параметров рассогласования
вычисляются во втором вычислителе 33 в соответствии с выражениями (19) и (20), которые поступают на четвертую группу входов 39 вычислителя 34 параметров рассогласования, где осуществляется вычисление параметров рассогласования  в соответствии с выражениями (21) и (22).
в соответствии с выражениями (21) и (22).
Если в анализаторе 20 одновременно не выполняются условия (12), (13) и (14), что соответствует постановке вертолетом одновременно уводящих по дальности и по скорости помех (фиг. 4, 5 момент времени t1), то на выходе коммутатора 24 формируются разрешающие сигналы для прохождения оценок  на третью группу входов 37 второго вычислителя 33 и оценок
на третью группу входов 37 второго вычислителя 33 и оценок  - на третью группу входов 38 вычислителя 34 параметров рассогласования. В результате оценки ускорения вертолета
- на третью группу входов 38 вычислителя 34 параметров рассогласования. В результате оценки ускорения вертолета  вычисляются во втором вычислителе 33 в соответствии с выражениями (23) и (24), которые поступают на четвертую группу входов 39 вычислителя 34 параметров рассогласования, где осуществляется вычисление параметров рассогласования
вычисляются во втором вычислителе 33 в соответствии с выражениями (23) и (24), которые поступают на четвертую группу входов 39 вычислителя 34 параметров рассогласования, где осуществляется вычисление параметров рассогласования  в соответствии с выражениями (25) и (26).
в соответствии с выражениями (25) и (26).
Вычисленные таким образом параметры рассогласования  с выхода вычислителя 34 поступают в систему управления ракетой (СУР) для Вычисленные таким образом параметры рассогласования
с выхода вычислителя 34 поступают в систему управления ракетой (СУР) для Вычисленные таким образом параметры рассогласования  с выхода вычислителя 34 поступают в систему управления ракетой (СУР) для обеспечения самонаведения ракеты на вертолет в зависимости от результата идентификации воздействия или отсутствия воздействия уводящих по дальности и скорости помех.
с выхода вычислителя 34 поступают в систему управления ракетой (СУР) для обеспечения самонаведения ракеты на вертолет в зависимости от результата идентификации воздействия или отсутствия воздействия уводящих по дальности и скорости помех.
Таким образом, предлагаемое изобретение позволит повысить эффективность наведения ракеты «воздух - воздух» с АРГС на вертолет при постановке им уводящих по дальности и скорости помех.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Пат. 2325306 С1 Российская Федерация, МПК B64D 7/00 (2006.01), F41G 3/22 (2006.01), F41G 7/22 (2006.01), F42B 14/01 (2006.01). Способ функционирования информационно-вычислительной системы ракеты и устройство для его осуществления [Текст] / Ефанов В.В., Мужичек С.М.: заявитель и патентообладатель: Василий Васильевич Ефанов (RU), Сергей Михайлович Мужичек (RU). - №2006132147/02; заявл. 06.09.2006; опубл. 27.05.2008, Бюл. №14. - 13 с.: ил. (аналог).
2. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. - М.: Радио и связь, 1982, страница 246, формула (6.4.5)
3. Методы самонаведения истребителей и ракет класса «воздух - воздух» на групповую воздушную цель: монография / под ред. А.А. Кучина. - Красноярск: Сибирский федеральный университет, 2014. Страницы 7-9. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на заданный тип самолёта с турбореактивным двигателем из состава их разнотипной пары при воздействии уводящих по скорости помех | 2022 |
|
RU2783734C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на вертолёт при различном характере его полёта | 2019 |
|
RU2726273C1 |
| Способ всеракурсного самонаведения ракеты "воздух-воздух" на заданный тип самолёта из состава их разнотипной пары | 2023 |
|
RU2805782C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на самолёт из состава их пары по его функциональному назначению по принципу "ведущий-ведомый" | 2019 |
|
RU2695762C1 |
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на заданный тип самолёта с турбореактивным двигателем из состава их разнотипной пары | 2021 |
|
RU2758682C1 |
| Способ самонаведения ракеты "воздух-воздух" с активной радиолокационной головкой самонаведения в вертикальной плоскости на вертолет с бортовым комплексом обороны | 2023 |
|
RU2812306C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТОЙ | 2006 |
|
RU2335730C2 |
| Способ комплексирования информации радиолокационной станции и радиолокационных головок самонаведения ракет, пущенных носителем по воздушной цели при воздействии уводящих по дальности и скорости помех | 2021 |
|
RU2765145C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325306C1 |
| СПОСОБ СКРЫТНОГО САМОНАВЕДЕНИЯ САМОЛЕТОВ НА ВОЗДУШНЫЕ ОБЪЕКТЫ | 2009 |
|
RU2408845C1 |
Изобретение относится к области радиоэлектронных систем управления (РЭСУ) ракет «воздух - воздух» с активной радиолокационной головкой самонаведения (АРГС) и может быть использовано для повышения эффективности самонаведения ракеты на вертолет при постановке им уводящих по дальности и скорости помех. Технический результат - повышение эффективности наведения ракеты «воздух - воздух» с АРГС на вертолет при постановке им уводящих по дальности и скорости помех. Заявленный способ заключается в том, что передатчик АРГС формирует зондирующий сигнал, который через антенну головного канала излучается в направлении на вертолет, отраженный от вертолета радиолокационный (РЛ) сигнал через антенну головного канала поступает в приемник, где усиливается, преобразуется на промежуточную частоту и поступает на входы блока БПФ, в котором преобразуется в амплитудно-частотный спектр (АЧС) сигнала, а также дальномера, автоселектора скорости и угломера, на каждом k-м такте работы АРГС измеряются и оцениваются различные параметры. Далее осуществляется самонаведение ракеты на вертолет, причем в бортовой радиолокационной станции носителя ракеты вычисляются различные параметры высоты полета ракеты, которые по каналу связи «носитель - ракета» передаются в АРГС через ее антенну хвостового канала. Далее осуществляется идентификация воздействия или отсутствия воздействия уводящих по дальности и скорости помех на основе анализа выполнения или невыполнения трех условий и в зависимости от результата идентификации осуществляется вычисление оценок ускорений вертолета в вертикальной и горизонтальной плоскостях, а также параметров рассогласования. 5 ил.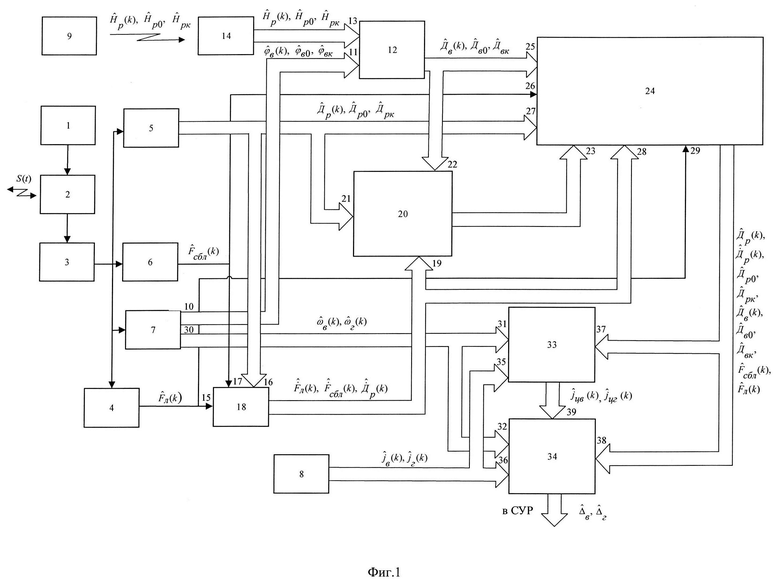
Способ функционирования активной радиолокационной головки самонаведения управляемой ракеты «воздух - воздух» при ее самонаведении на вертолет и постановке им уводящих по дальности и скорости помех, заключающийся в том, что передатчик активной радиолокационной головки самонаведения формирует квазинепрерывный, немодулированный зондирующий сигнал, который через антенну головного канала излучается в направлении на вертолет, отраженный от вертолета радиолокационный сигнал через антенну головного канала поступает в приемник, где усиливается, преобразуется на промежуточную частоту и поступает на входы блока быстрого преобразования Фурье, в котором преобразуется в амплитудно-частотный спектр сигнала, а также дальномера, автоселектора скорости и угломера, на каждом k-м такте работы активной радиолокационной головки самонаведения, где k=1, …, K; K - общее количество отсчетов дискретного времени, измеряются и оцениваются: в дальномере - текущая дальность  между ракетой и вертолетом, дальности между ракетой и вертолетом в момент начала
между ракетой и вертолетом, дальности между ракетой и вертолетом в момент начала  и окончания
и окончания  самонаведения; в автоселекторе скорости - доплеровская частота, обусловленная скоростью сближения ракеты с вертолетом
самонаведения; в автоселекторе скорости - доплеровская частота, обусловленная скоростью сближения ракеты с вертолетом  в угломере - угол относительно линии визирования «ракета - вертолет» в вертикальной
в угломере - угол относительно линии визирования «ракета - вертолет» в вертикальной  плоскости, угловые скорости вращения линии визирования «ракета - вертолет» в вертикальной
плоскости, угловые скорости вращения линии визирования «ракета - вертолет» в вертикальной  и горизонтальной
и горизонтальной  плоскостях; в акселерометре ракеты оцениваются собственные ускорения ракеты в вертикальной
плоскостях; в акселерометре ракеты оцениваются собственные ускорения ракеты в вертикальной  и горизонтальной
и горизонтальной  плоскостях, вычисляются оценки ускорений вертолета в вертикальной
плоскостях, вычисляются оценки ускорений вертолета в вертикальной  и горизонтальной
и горизонтальной  плоскостях в соответствии с выражениями
плоскостях в соответствии с выражениями
где  - производные угловых скоростей в вертикальной и горизонтальной плоскостях соответственно;
- производные угловых скоростей в вертикальной и горизонтальной плоскостях соответственно;
λ - рабочая длина волны активной радиолокационной головки самонаведения, вычисляются оценки параметров рассогласования в вертикальной  и горизонтальной
и горизонтальной  плоскостях в соответствии с выражениями
плоскостях в соответствии с выражениями
в соответствии с выражениями (3), (4) осуществляется самонаведение ракеты на вертолет, отличающийся тем, что в бортовой радиолокационной станции носителя ракеты, с которого был произведен ее пуск, вычисляется относительно земной поверхности оценка текущей высоты полета ракеты  а также оценки высоты полета ракеты в момент начала
а также оценки высоты полета ракеты в момент начала  и окончания
и окончания  ее самонаведения в соответствии с выражениями
ее самонаведения в соответствии с выражениями

где  - текущая оценка высоты полета носителя ракеты относительно земной поверхности;
- текущая оценка высоты полета носителя ракеты относительно земной поверхности;
 - оценка высоты полета носителя ракеты относительно земной поверхности в момент начала и окончания самонаведения соответственно;
- оценка высоты полета носителя ракеты относительно земной поверхности в момент начала и окончания самонаведения соответственно;
 - текущая оценка дальности «носитель - ракета»;
- текущая оценка дальности «носитель - ракета»;
 - оценка дальности «носитель - ракета» в момент начала и окончания самонаведения соответственно;
- оценка дальности «носитель - ракета» в момент начала и окончания самонаведения соответственно;
 - текущая оценка угла относительно линии визирования «носитель - ракета» в вертикальной плоскости;
- текущая оценка угла относительно линии визирования «носитель - ракета» в вертикальной плоскости;
 - оценка углов относительно линии визирования «носитель - ракета» в вертикальной плоскости в момент начала и окончания соответственно,
- оценка углов относительно линии визирования «носитель - ракета» в вертикальной плоскости в момент начала и окончания соответственно,
которые по каналу связи «носитель - ракета» передаются в активную радиолокационную головку самонаведения через ее антенну хвостового канала, в активной радиолокационной головке самонаведения вычисляются оценки текущей дальности между ракетой и земной поверхностью в направлении на вертолет  дальности между ракетой и земной поверхностью в направлении на вертолет в момент начала
дальности между ракетой и земной поверхностью в направлении на вертолет в момент начала  и окончания
и окончания  ее самонаведения в соответствии с выражениями
ее самонаведения в соответствии с выражениями

где  - оценка угла относительно линии визирования «ракета - вертолет» в вертикальной плоскости в момент начала и окончания ее самонаведения соответственно, вычисляется отсчет доплеровской частоты FЛ, соответствующий энергетическому центру отражений радиолокационного сигнала от наступающей лопасти несущего винта вертолета, в соответствии с выражением
- оценка угла относительно линии визирования «ракета - вертолет» в вертикальной плоскости в момент начала и окончания ее самонаведения соответственно, вычисляется отсчет доплеровской частоты FЛ, соответствующий энергетическому центру отражений радиолокационного сигнала от наступающей лопасти несущего винта вертолета, в соответствии с выражением

где М{…} - операция математического ожидания;
Fi и Ai - соответственно i-я доплеровская частота и амплитуда спектральной составляющей, соответствующая отражениям радиолокационного сигнала от наступающей лопасти несущего винта вертолета;
I=1, …, I; I - общее количество доплеровских частот и амплитуд спектральных составляющих, соответствующих отражениям радиолокационного сигнала от наступающей лопасти несущего винта вертолета, определяется оценка доплеровской частоты  вычисляются производные оценки дальности до вертолета
вычисляются производные оценки дальности до вертолета  и доплеровских частот
и доплеровских частот  вычисляются следующие модули разностей, которые сравниваются с пороговыми значениями ε1, ε2, ε3, близкими к нулю
вычисляются следующие модули разностей, которые сравниваются с пороговыми значениями ε1, ε2, ε3, близкими к нулю
осуществляется идентификация воздействия или отсутствия воздействия уводящих по дальности и скорости помех на основе анализа выполнения или невыполнения условий (12), (13), (14) и в зависимости от результата идентификации осуществляется вычисление оценок ускорений вертолета в вертикальной  и горизонтальной
и горизонтальной  плоскостях, а также параметров рассогласования
плоскостях, а также параметров рассогласования  так, если одновременно выполняются условия (12), (13) и (14), что соответствует отсутствию воздействия уводящих по дальности и скорости помех, то оценки ускорения вертолета
так, если одновременно выполняются условия (12), (13) и (14), что соответствует отсутствию воздействия уводящих по дальности и скорости помех, то оценки ускорения вертолета  вычисляются в соответствии с выражениями (1), (2), а вычисление параметров рассогласования
вычисляются в соответствии с выражениями (1), (2), а вычисление параметров рассогласования  осуществляется в соответствии с выражениями (3) и (4), если не выполняются условия (12), (13) и выполняется условие (14), что соответствует постановке вертолетом уводящей по дальности помехи, то оценки ускорений вертолета
осуществляется в соответствии с выражениями (3) и (4), если не выполняются условия (12), (13) и выполняется условие (14), что соответствует постановке вертолетом уводящей по дальности помехи, то оценки ускорений вертолета  вычисляются в соответствии с выражениями
вычисляются в соответствии с выражениями


а параметры рассогласования  вычисляются в соответствии с выражениями
вычисляются в соответствии с выражениями
если не выполняются условия (12), (14) и выполняется условие (13), что соответствует постановке вертолетом уводящей по скорости помехи, то оценки ускорений вертолета  вычисляются в соответствии с выражениями
вычисляются в соответствии с выражениями
а параметры рассогласования  вычисляются в соответствии с выражениями
вычисляются в соответствии с выражениями
если одновременно не выполняются условия (12), (13) и (14), что соответствует постановке вертолетом одновременно уводящих по дальности и скорости помех, то оценки ускорений вертолета  вычисляются в соответствии с выражениями
вычисляются в соответствии с выражениями
а параметры рассогласования  вычисляются в соответствии с выражениями
вычисляются в соответствии с выражениями
| Способ формирования параметров рассогласования в радиоэлектронной системе управления ракетой класса "воздух-воздух" при её самонаведении на вертолёт при различном характере его полёта | 2019 |
|
RU2726273C1 |
| Способ распознавания типового состава групповой воздушной цели различных классов при различных условиях ее полета на основе калмановской фильтрации и нейронной сети | 2022 |
|
RU2802653C1 |
| СПОСОБ ПОЛУПАССИВНОГО САМОНАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ КЛАССА "ВОЗДУХ - ВОЗДУХ" С РАДИОЛОКАЦИОННОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ | 2000 |
|
RU2181869C2 |
| US 7059560 B2, 13.06.2006. | |||

