Предложенное техническое решение относится к системам вибрационного и/или акустического контроля режимов работы промышленного оборудования, в частности, механизмов вращения с использованием технологии машинного обучения. Значительная часть промышленного оборудования содержит в качестве основных или вспомогательных элементов вращающиеся части, такие как роторы, валы турбин, подшипники и подобные механизмы и детали. Все они, в той или иной степени, подвержены износу, который в процессе работы оборудования может вызывать нежелательные вибрационные или акустические колебания, распространяющиеся по всему оборудованию и в окружающую среду. Некоторые виды колебаний свидетельствуют о серьезных неполадках в работе оборудования, например, о скором выходе из строя некоторых деталей, в особенности, подшипников различных видов. Это может привести к преждевременному выходу из строя самого оборудования, нанеся, тем самым, ущерб производственному процессу. Вибрационный и акустический анализ позволяет обнаружить неисправность еще на ранней стадии ее развития. В некоторых случаях он помогает определить саму причину нежелательных вибраций. Однако вибрационная и акустическая картины является нормальной частью работы оборудования по причине наличия в нем множества движущихся деталей и механизмов. Изменение виброакустической сигнатуры оборудования может быть связано с переходом от одного штатного режима работы оборудования к другому, вызванного, например, изменением скорости вращения вала. Поэтому, необходимы системы и способы, позволяющие проводить анализ режимов работы оборудования с целью выявления потенциально опасных для нормальной работы оборудования режимов.
Традиционные методы мониторинга состояния оборудования основаны на обнаружении ситуации, когда значения виброскорости или виброускорения превышают пороговые значения. Этот тип анализа требует данных, которые представляют собой как нормальные, так и аварийные режимы работы оборудования, то есть необходимы конкретные значения для определенных узлов или агрегатов. Такие данные получают расчетным путем в процессе проектирования установки или опытным путем в процессе испытаний.
В процессе поиска, среди массива технических решений, были найдены изобретения, решающие сходные технические задачи. Так, обнаружено техническое решение по патенту Российской Федерации на изобретение №2691225 «Устройство измерения и оценки технического состояния оборудования машиностроительного комплекса» (МПК G01M 7/00, ДГТУ, РФ, з. №2018123580, 28.06.2018, публ. 11.06.2019). Согласно описанию, изобретение относится к устройствам измерительной техники, а именно к устройствам мониторинга технического состояния объекта. Устройство состоит из корпуса, включающего модуль мониторинга на плате с микроконтроллером, модулем хранения информации, модулем анализа информации, модулем ввода/вывода информации и приемопередатчиком, соединенным с внешним вспомогательным оборудованием, датчиком тока, датчиком напряжения и корпусом измерительной головки с установленными на ее корпусе датчиками температуры, шума и вибрации.
Недостатком указанного технического решения является мобильность, что не предусматривает длительного наблюдения за состоянием оборудования, при этом требуется наличие оператора, выполняющего измерение, обработку и интерпретацию результатов измерений. Известно, что дефекты оборудования с вращающимися частями проявляются не спорадически, но на протяжении некоторого, иногда длительного, временного отрезка и, таким образом, при использовании указанного технического решения невозможно оценить развитие дефекта во времени.
Эволюционным этапом в развитии систем диагностики оборудования, является использование современных нейросетевых моделей, способных проводить глубокий анализ режимов его работы. Известно техническое решение по патенту ЕС на изобретение №3186598 «Monitoring of a device having a movable part (контроль устройства, имеющего движущуюся часть)» (МПК G01M 13/04; G05B 19/4065; Siemens AG, ФРГ, з. № ЕР 14873124 А, 02.12.2014, к. 02.12.2014, публ. 05.07.2017). Согласно описанию технического решения, изобретение относится к мониторингу устройства, имеющего подвижную часть, в частности, вращающуюся часть, при этом устройство содержит: модуль управления, сконфигурированный для приема сигнала вибрации устройства, снабженный датчиком, соединенным с устройством, обеспечивающим спектр сигнала вибрации, предварительно обрабатывающим спектр, для определения базовых частот и побочных частот, при этом базовые частоты - это частоты, пиковая мощность которых соответствует собственным частотам устройства или частотам неисправности, а побочные частоты соответствуют другим частотам. Затем обрабатывают базовые частоты и побочные частоты, применяя отдельно одноклассовую классификацию к базовым частотам и побочным частотам, объединяют результаты одноклассовых классификаций, тем самым получая сигнал классификации, который представляет уровень достоверности 1, и выводят сигнал поддержки принятия решения на основе сигнала классификации, этот сигнал поддержки принятия решения указывает на состояние ошибки отслеживаемого устройства.
Впрочем, изобретение также не лишено недостатков, среди которых отсутствие возможности приема информации о звуковом сопровождении работы оборудования, так как известно, что звук, соответствующий любому дефекту, проявляется на ранних стадиях повреждения оборудования, до того момента, когда можно зафиксировать отклонения в уровне возникающих вибраций присущим этому виду дефекта. К недостаткам также можно отнести требование знать частоты неисправности, что является недостатком при попытке обнаружения дефектов ранее неизвестных.
Наиболее близким к заявляемому устройству является система по патенту США на изобретение №7363111 «Methods and systems for analyzing engine unbalance conditions (Способы и системы для анализа состояния разбалансировки двигателя)» (МПК G05B 23/02; G01M 1/38; Boeing Со, США, з. № US 70843707 A, 20.02.2007, к. 30.12.2003, публ. 22.04.2008). В изобретении раскрыты способы и системы анализа состояния разбалансировки двигателя. В одном варианте осуществления способ включает в себя прием данных от датчиков вибрации из множества местоположений, распределенных по двигателю и окружающей опорной конструкции двигателя, ввод указанных данных в инверсную модель нейросети. Модель устанавливает взаимосвязь между данными вибрации и состоянием разбалансировки двигателя и выводит диагностическую информацию, указывающую на состояние дисбаланса двигателя. В дополнительном варианте осуществления способ включает в себя обработку данных о вибрации по быстрому преобразованию Фурье, для извлечения искомых данных о вибрации один раз за оборот перед вводом в инверсную модель нейронной сети. Вместе с тем, к недостаткам указанного технического решения можно отнести отсутствие упоминания о возможности переобучения нейросети в реальном времени, а также необходимость установки множества датчиков и отсутствие анализа акустических сигналов.
Таким образом, имеющийся уровень техники не содержит сведений об устройствах и способах, решающих проблему создания технологичного и надежного устройства и способа его работы, позволяющих улучшить возможность распознавания нештатных и потенциально аварийных режимов работы промышленного оборудования с вращающимися частями, что позволит снизить частоту отказов вследствие раннего выявления неисправности, сократит время простоя и позволит избежать дорогостоящего ремонта ключевых элементов оборудования. Дополнительным техническим результатом является портативность устройства, позволяющего расширить сферу его применения.
В общем случае реализации устройство для виброакустического анализа оборудования, содержащего вращающиеся части характеризуется наличием, по меньшей мере, одного датчика для получения данных о вибрации, средств обработки данных с возможностью получения и извлечения из полученных от датчиков данных о режимах работы оборудования, по меньшей мере, одного датчика для получения данных об акустических колебаниях и средств машинного обучения, связанных со средствами обработки данных, для распознавания и/или запоминания режимов работы оборудования.
Признаками, общими с аналогом, являются наличие, по меньшей мере, одного датчика для получения данных о вибрации, средств обработки данных с возможностью получения и извлечения из полученных от датчиков данных о режимах работы оборудования.
В общем случае, устройство отличается тем, что снабжено, по меньшей мере, одним датчиком для получения данных об акустических колебаниях и средствами машинного обучения, связанными со средствами обработки данных, для распознавания и/или запоминания режимов работы оборудования.
В первом частном случае устройство выполнено с возможностью закрепления на оборудовании таким образом, что датчики улавливают вибрационные и акустические данные вращающихся частей.
В ином частном случае выполнения, средства машинного обучения выполнены с возможностью кластеризации данных.
В следующем частном случае выполнения, устройство снабжено источником питания.
В следующем частном случае выполнения, датчик вибрации выполнен с возможностью получения данных о вибрации по трем осям.
В развитие указанного частного случая, датчик вибрации выполнен в виде акселерометра.
В ином частном случае выполнения, датчик для получения данных об акустических колебаниях выполнен в виде микрофона.
В следующем частном случае, средства обработки данных выполнены в виде системы на кристалле.
Целесообразно выполнение средств машинного обучения в виде нейроморфного чипа.
В ином частном случае выполнения, извлекаемыми данными являются математически преобразованные сигналы с датчиков, сформированные в вектор признаков.
Целесообразно снабжение устройства средствами вывода информации о режимах работы оборудования.
Устройство в общем случае реализации содержит датчики, динамически получающие данные о вибрационной и акустической компонентах (сигнатуре) при работе оборудования. Этими приборами могут быть, например, как указано в частных случаях, акселерометр и микрофон, соответственно. Затем данные в виде сигналов в оцифрованном виде поступают на средства обработки в виде компьютерной системы с процессором, способным проводить анализ, математические преобразования полученных данных и передавать их в обработанном виде средствам машинного обучения. Под обработанным видом данных контексте настоящего изобретения понимается вектор признаков X, состоящий из компонент, извлекаемых путем математических, в частности, быстрых преобразований Фурье и вейвлет преобразований, из сигналов, поступивших от датчиков вибрации и акустических колебаний. Средствами машинного обучения поступающий для анализа вектор признаков распознается и проверяется на условие известности для указанных средств машинного обучения. В случае неизвестности, вектор признаков записывается, а затем кластеризуется. Кластеру, впоследствии, присваивается категория. Использование для анализа вектора признаков средств машинного обучения, построенного на основе нейроморфного процессора, позволяет оперативно динамически проводить анализ поступающих от средств обработки данных векторов признаков и режиме реального времени получать информацию о режимах работы оборудования. Эта информация необходима для оценки состояния оборудования и принятия решений по его техническому обслуживанию.
В некоторых случаях, устройство может быть снабжено собственным источником питания, что позволяет создать компактное энергонезависимое от внешних источников решение, которое целесообразно использовать в качестве портативного диагностического оборудования для проверки состояния движущихся частей и механизмов. Вместе с тем, устройство также может быть использовано как составляющая часть системы управления оборудованием. В таком случае, требования к его энергетической автономности и транспортируемости не предъявляются. Так, оно может быть встроено в электрический контур указанной системы управления.
Использование в качестве средств обработки данных компактных компьютерных систем, в частности SoC (System-on-crystal), позволяет повысить технологичность устройства, его вычислительную эффективность и снизить стоимость изготовления.
Снабжение устройства средствами вывода информации о работе оборудования относится к использованию различных интерфейсов для присоединения к периферийному оборудованию. В качестве стандартного интерфейса предлагается использовать Ethernet. Дополнительно может быть реализован Wi-Fi интерфейс для подключения к мобильным устройствам на базе систем Android® и iOS®.
Устройство может содержать корпус, в котором размещены все его компоненты -так решается проблема портативности. Источник питания может быть выполнен заодно с корпусом или для устройства может быть обеспечено питание от сети. Датчики, в предпочтительном варианте выполнения, находятся внутри корпуса для обеспечения портативности устройства. При выполнении датчиков внутри корпуса, последний может быть снабжен шпилькой, устанавливающейся в соответствующее посадочное отверстие на оборудовании, для обеспечения лучшего контакта для передачи виброакустических колебаний.
В целом, отсутствие большого количества узлов и элементов устройства обеспечивает высокий уровень надежности.
В группу изобретений также входит способ, частично раскрытый при описании устройства выше. Способ виброакустического анализа оборудования, содержащего вращающиеся части, характеризуется следующими признаками: получение средствами обработки данных информации о вибрации и/или акустических колебаниях вращающихся частей оборудования, математическую обработку полученных данных с извлечением признаков, формирование вектора признаков и передачу на средства машинного обучения для распознавания и/или запоминания.
В первом частном случае, способ характеризуется тем, что средства машинного обучения кластеризуют распознанные векторы признаков.
В уточнении указанного частного случая, способ характеризуется тем, что средствами машинного обучения кластерам присваивают категории, соответствующие режимам работы оборудования
В ином частном случае, математическая обработка включает извлечение признаков из полученных данных о вибрации и/или акустических колебаниях посредством быстрых преобразований Фурье, вейвлет преобразований, эмпирическую модовую декомпозицию, эмпирическую кумулятивную функцию распределения.
В следующем частном случае, полученные датчиками данные оцифровывают перед анализом средствами обработки данных.
В четвертом частном случае, в способе обеспечивается вывод информации о режимах работы оборудования на средства отображения данных.
В ином частном случае, если средствами машинного обучения при распознавании переданного вектора признаков установлено, что если вектор признаков не изучен средствами машинного обучения, то указанный вектор признаков запоминается средствами машинного обучения и в последующем кластеризуется.
Основой способа служит блок математических преобразований обеспечивающихся путем извлечения признаков из данных, поступающих на средства обработки от датчиков, дальнейшее распознавание сформированного по результатам этих преобразований вектора признаков в виде признакового описания данных по вибрации и акустическим колебаниям, изменяющегося динамически, и кластеризация средствами машинного обучения векторов признаков в группы, объединенных общими сигнатурами. Таким образом, разумными средствами решается задача обучения и дальнейшего распознавания режимов работы оборудования. Кластерам может быть присвоена категория, позволяющая ориентироваться в распознанных режимах, и предусмотрена возможность вывода информации, например, о нештатных режимах. Как было отмечено при описании устройства, извлечение признаков из исходных данных осуществляется путем, в частности, быстрых преобразований Фурье, вейвлет-преобразований, позволяющих выделить из сигнала от датчиков характеризующие его компоненты. Категоризация кластеров осуществляется с целью выделения нештатных и потенциально аварийных режимов работы оборудования. Признаки, извлекаемые из данных, поступающих от датчиков, получают путем математических преобразований, включающих быстрые преобразования Фурье, вейвлет-преобразования, эмпирическую модовую декомпозицию, эмпирическую кумулятивную функцию распределения. Преобразования данных указанными способами позволяет выделить ключевые особенности сигналов, получаемых от датчиков, что впоследствии позволяет на основе сформированных векторов, определить, присутствие в виброакустической сигнатуре оборудования нетипичного режима функционирования.
Для того чтобы информация могла быть воспринята оператором, способом может быть предусмотрен вывод информации, например, о нештатном режиме работы оборудования через внешний интерфейс на периферийное устройство.
В процессе работы способа, на стадии, когда векторы признаков распознаются средствами машинного обучения, последние запрограммированы так, что неизвестные из предыдущих итераций (новые) векторы признаков записываются указанными средствами и автоматически определяются в соответствующие кластеры. Если же записанный вектор не может быть отнесен к существующему кластеру, то создается новый кластер и указанный вектор определяется во вновь созданный кластер. Это позволяет выявить новые режимы работы оборудования, которые могут быть нештатными и вести к неполадкам его вращающихся частей.
Предлагаемое изобретение поясняется следующими фигурами:
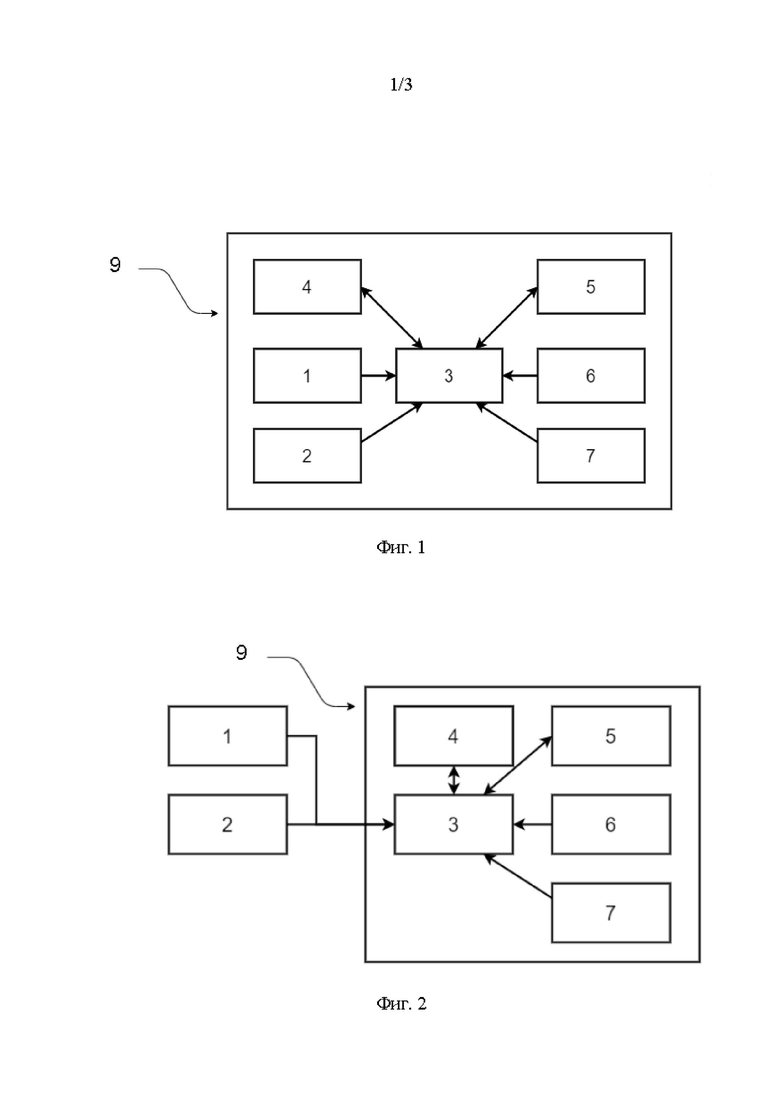
Фиг. 1 устройство с интегрированными датчиками и внешним источником питания;
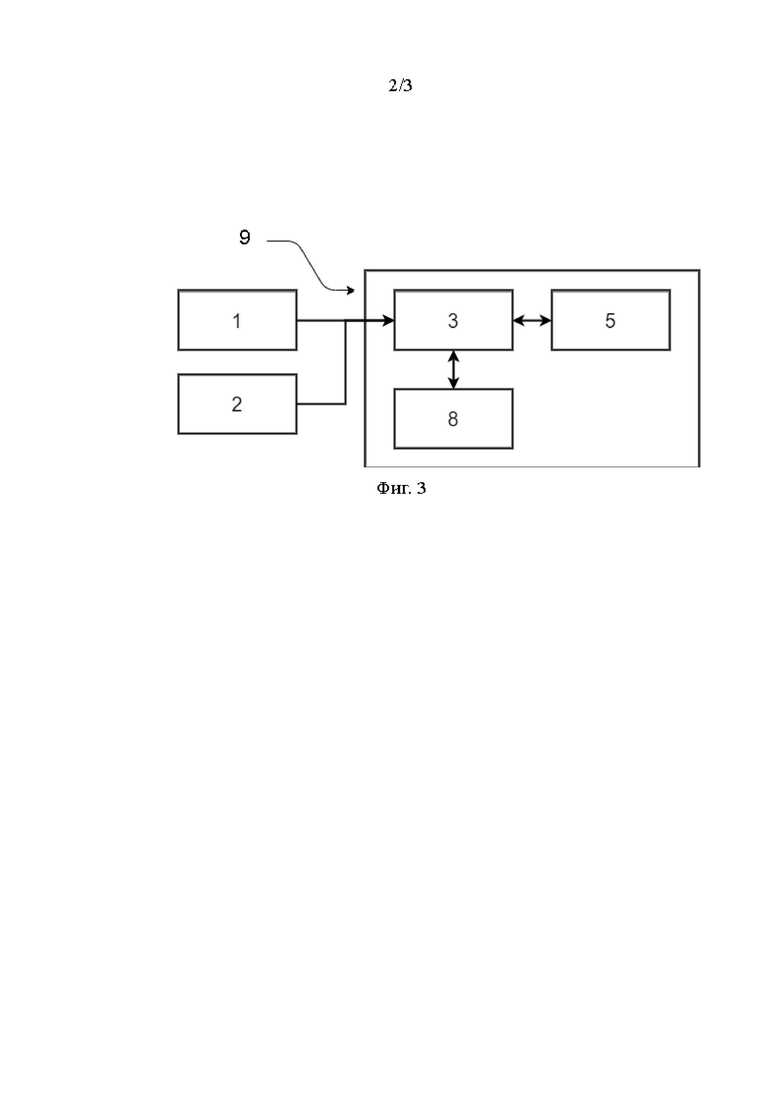
Фиг. 2 - устройство с вынесенными датчиками;
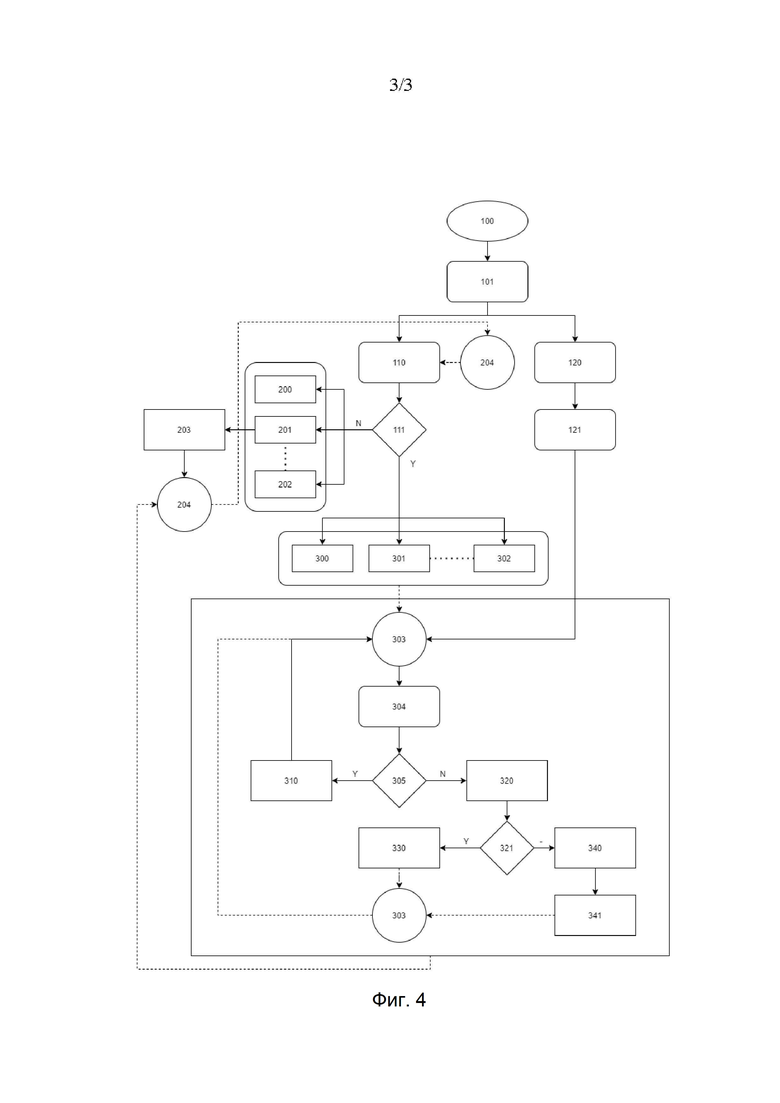
Фиг. 3 - устройство с вынесенными датчиками и внешним источником питания;
Фиг. 4 блок-схема алгоритма виброакустической диагностики.
На фигурах 1-3 обозначены следующие позиции:
1 датчик вибрации;
2 - датчик акустических колебаний;
3 - средства обработки данных (SoC);
4 оперативная память;
5 средства машинного обучения (нейроморфный процессор);
6 - источник питания;
7 интерфейс;
8 -модуль Wi-Fi и/или Bluetooth;
9 - корпус.
Содержание блоков на фигуре 4 приведено в описании ниже при раскрытии частных реализаций настоящей группы изобретений в части функционирования способа.
Для понимания принципов работы и особенностей различных реализаций группы изобретений, ниже приведено описание фигур технического решения. Хотя в тексте описания подробно объясняются предпочтительные варианты реализации технического решения, необходимо понимать, что возможны и иные варианты реализации группы изобретений. Соответственно, нет необходимости в ограничении объема правовой охраны технического решения исключительно представленными реализациями и перечнями узлов и компонентов. Вместе с тем, при описании предпочтительных вариантов технического решения, для ясности понимания основных принципов изобретения специалистом, необходимо уточнить термины, применяемые в описании.
Необходимо отметить, что используемые в единственном числе в описании и формуле узлы и детали устройства также представляют собой и множественные формы, если прямо не сказано обратное. Например, указание на составной элемент устройства также означает указание на совокупность (множество) таких элементов.
Также, при описании предпочтительных вариантов выполнения, для обеспечения ясности понимания, используются специальные термины. Предполагается, что термин используется в самом широком смысле, в каком он может быть истолкован специалистами в данной области техники и включает все технические эквиваленты, используемые тем же образом и с той же целью. Так, в частности, словосочетание «оборудование, содержащее вращающиеся части» означает устройства, в составе которых при их работе некоторые детали и/или механизмы совершают вращательное движение. К таким устройствам может относиться оборудование, содержащее валы, турбины, барабаны, молотильно-дробильные устройства. Под вибрацией понимаются механические колебания твердых тел в частотном диапазоне 1,6 1500 Гц, применительно к настоящей группе изобретений, к вибрации относятся колебания, возникающие при работе оборудования с движущимися, преимущественно, путем вращения, частями. Под акустическими колебаниями понимают колебания упругой среды: воздуха, твердых тел вызывающих распространение в них упругих волн в диапазоне от 6 до 20000 Гц. Под средствами обработки данных понимают совокупность программно-аппаратных средств, предназначенных для получения, анализа, обработки, преобразования данных, в частности, поступающих от датчиков вибрации и акустических колебаний. В общем виде, указанные средства могут быть выполнены в виде электронного устройства, снабженного процессором и памятью, исполняющего соответствующий программный код. Под извлечением информации понимают осуществление над полученными от датчиков данными таких математических преобразований, результат которых приводит к возможности получения информации о режиме работы оборудования. Под средствами машинного обучения понимается программно-аппаратный комплекс, использующий нейросетевые модели для распознавания, записи и группировки подвергнутых математическим преобразованиям данных от датчиков. Под кластеризацией понимают распределение заданной выборки объектов на непересекающиеся подмножества так, чтобы каждый кластер состоял из схожих объектов, а объекты разных кластеров отличались. Под вектором признаков понимают способ ввода данных для средства машинного обучения, при котором формируется вектор, составленный из значений (признаков) соответствующих набору признаков, описывающих объект. Объектом, в контексте настоящего изобретения, являются вибрационные и акустические данные, полученные от датчиков. Значения, из которых формируется вектор, получены путем проведения математических преобразований указанных данных. Термин запоминание, относящийся к операции средств машинного обучения характеризует запись и последующую кластеризацию поступившего для анализа вектора признаков.
Слова «состоящий», «содержащий», «включающий» означают, что, по меньшей мере, указанный компонент, элемент, часть или шаг способа присутствует в композиции, предмете или способе, но не исключает присутствие иных компонентов, материалов, частей, шагов способа, даже если такой компонент, материал, часть, шаг способа выполняет ту же функцию, что и указанный.
Материалы, из которых изготовлены различные элементы настоящей группы изобретений, указанные ниже при описании примеров конкретного выполнения системы, являются типичными, но не обязательными для применения. Указанные в настоящих примерах выполнения компоненты системы, могут быть заменены многочисленными аналогами, выполняющими ту же функцию, что и приведенные в описании примеры используемых системы и способов.
Здесь и далее описано электронное устройство, реализующее метод виброакустического анализа для выявления неисправностей подшипников и шестерен промышленного оборудования. В устройстве применен неконтролируемый алгоритм самообучения для раннего обнаружения неисправностей в промышленном оборудовании на основе объединенного алгоритма виброакустического анализа кластеризации сигналов и дальнейшего распознавания с использованием нейроморфного чипа NM500. На этапе настройки и обучения устройством изучаются данные без обладания информации о видах отказов, и когда изученные режимы функционирования узлов или агрегатов сходятся к некоторому количеству предполагается, что устройством изучены все штатные режимы работы оборудования. Затем, во время эксплуатации, сравниваются расстояния между кластерами входных обработанных данных, с ранее изученными данными (центрами кластеров), с использованием микросхемы NM500. Если числовой вектор, составленный из особенностей текущего кластера, характеризующего режим работы оборудования, не совпадает с ранее выученными векторами, составленными по такому же принципу - делается заключения о наличии нового, не известного ранее режима работы оборудования. Таким образом, устройство способно обнаруживать аномальные новые данные, которые были неизвестны ранее. При этом делается предположение, что категории (кластеры), обнаруженные и выученные на стадии обучения, представляют собой категории, которые можно отнести к штатным режимам работы оборудования. Если при работе устройства после завершения стадии обучения, появившийся при распознавании признаков вновь сформированный кластер относится к категории новых и неизвестных, об этом сообщается обслуживающему персоналу.
Предлагаемое устройство относится к электронным устройствам с внутренним программным обеспечением, предназначенным для обработки виброускорения по трем осям и звуковой сигнатуры, поступающих от расположенных внутри корпуса трехосевого акселерометра и микрофона.
В одном из частных случаев реализации, в соответствии с принципиальной схемой компонентов, представленной на Фиг. 1, устройство конструктивно выполнено в корпусе с размерами 50×50×40 мм в основании которого закреплена металлическая резьбовая шпилька, служащая для крепления на промышленном оборудовании (вкручивания в оборудование) через которую передается вибрационные и акустические колебания контролируемого оборудования. Корпус может быть выполнен из любого материала, не обладающего существенными вибропоглощающими свойствами. В рассматриваемом частном случае основание корпуса выполнено из металла. Внутри корпуса установлен акселерометр (1), фиксирующий показания вибрационные колебания, микрофон (2) широкого спектра для улавливания акустических колебаний оборудования в процессе работы. Указанные датчики соединены электропроводящими цепями с однокристальной системой ZYNQ 7020 (3), выполненной на печатной плате, содержащей соответствующие разъемы для подключения периферийного оборудования, в данном случае, датчиков, и распаянный на плате модуль оперативной памяти (4). Оперативная память (4) также может быть распаяна на плате без возможности извлечения. Система (3) соединена через кросс-разъем на печатной плате с нейроморфным процессором NM500 (5). Питание системы осуществляется посредством встроенного в корпус источника питания (6), подключенного к печатной плате через соответствующую цепь питания. На печатной плате также выполнен, по меньшей мере, один интерфейсный разъем (7), служащий для передачи обработанных данных на иные устройства, например, персональные компьютеры, терминалы, мобильные устройства. В частном случае, в качестве интерфейса установлен разъем Ethernet.
В ином частном случае, проиллюстрированном схематически на Фиг. 2, акселерометр (1) и микрофон (2) вынесены за пределы корпуса. Соответственно, при такой реализации, в корпусе должны быть выполнены либо разъемы для подключения кабелей, ведущих от датчиков, либо устройство должно быть снабжено компонентами, обеспечивающими беспроводную передачу данных от датчиков (1, 2) к однокристальной системе (3). Это могут быть приемо-передатчики, работающие по стандарту Wi-Fi, Bluetooth или иных подобных стандартах. Вместе с тем, необходимо предусмотреть высокую помехозащищенность протоколов передачи данных и наличие собственных источников питания для датчиков (1, 2). В остальном, конструктивно, устройство повторяет описанное на Фиг. 1.
Далее, в другом частном случае, схематически показанном на Фиг. 3, устройство, в остальной части конструктивного исполнение, может быть выполнено как по Фиг. 1, так и по Фиг. 2, однако отличие заключается в использовании модуля Wi-Fi/Bluetooth (8), который может быть выполнен в корпусе. С помощью указанного модуля можно передавать диагностическую информацию о состоянии оборудования в виде, например, кодов ошибок или небезопасных режимов на мобильные устройства или терминалы.
Устройство работает следующим образом. В частном случае выполнения, шпилька корпуса устройства устанавливается в соответствующее гнездо диагностируемого оборудования. При работе оборудования вибрационные и акустические колебания, распространяющиеся по оборудованию и в окружающую среду, улавливаются трехосевым акселерометром (1) и микрофоном (2), оцифровываются средствами самих датчиков или передаются для оцифровывания на однокристальную систему ZYNQ 7020 (3) для анализа. Система (3) проводит математические преобразования с полученными данными, извлекая из них признаки и формируя из извлеченных признаков вектор, таким образом составляя признаковое описание объекта. Оперативная память служит для выполнения программы, хранения выполняемой программы, а также для хранения входных, выходных и промежуточных данных, обрабатываемых системой (3). Полученный вектор признаков передается для анализа средствам машинного обучения нейроморфному процессору NM500 (5), проводящего распознавание вектора признаков и его кластеризацию. Далее, сравниваются расстояния между кластерами входных обработанных данных, с ранее изученными данными (центрами кластеров), с использованием NM500. Если вектор признаков, составленный из особенностей текущего кластера, характеризующего режим работы оборудования, не совпадает с ранее выученными векторами, составленными по такому же принципу - делается заключение о наличии нового, не известного ранее режима работы оборудования.
Способ, согласно Фиг. 4, состоит из следующих операций. Этап 100 подача питания и запуск в работу алгоритма (закрепление устройства на диагностируемом оборудовании) при условии, что устройство смонтировано на оборудовании. На этапе 101 осуществляют ввод исходных данных для конкретного оборудования, в блоках 110, 120 в динамическом режиме получают данные от датчиков вибрации, по трем осям, и акустических колебаний, соответственно. В блоке 111 осуществляется проверка выполнения инициализация - процедура присвоения параметров математических алгоритмов необходимых для последующей обработки данных. Если инициализация не была произведена, то в блоках 200...202 производится инициализация параметров математических алгоритмов в соответствии с начальными параметрами оборудования известными на шаге 101. Преобразуя данные на выходе блока 203, получают описание характеристик сигнала, что позволяет проводить дальнейший его анализ. Необходимо отметить, что диагностическая информация о текущем режиме работы контролируемого оборудования недоступна до тех пор, пока не будет выполнено наблюдение за работой оборудования в течение определенного времени. Это необходимо для динамического определения верхних и нижних границ поступающего сигнала и подстройки под характеристики входного сигнала и должно выполняться непрерывно в процессе работы устройства.
В блоках 300, … 302 средствами обработки данных осуществляются различные математические преобразования, в частности быстрые преобразования Фурье, вейвлет преобразования, эмпирическая модовая декомпозиция, эмпирическая кумулятивная функция распределения для извлечения признаков из поступивших для обработки данных и формирования вектора признаков. Сформированный вектор признаков 303 поступает на вход блока 304, где далее средствами машинного обучения осуществляется распознавание и проверка известности указанного вектора 305. Если вектор известен, то этапе 310 он отбрасывается и происходит возврат на этап 303, где формируется новый вектор признаков. Если же вектор признаков неизвестен, то он записывается средствами машинного обучения и на этапе 321 определяется его принадлежность к одному из существующих кластеров. Если вектор признаков может быть записан в существующий кластер, то на этапе 330 производится запись, далее осуществляется возврат на этап получения нового вектора признаков 303. Если вектор не может быть помещен в существующий кластер, то на этапе 340 производится создание нового кластера, запись вектора в созданный кластер 341 и возврат на этап 303.
Варианты реализации настоящего изобретения не ограничиваются приведенными выше примерами конкретного выполнения. Могут быть предложены и иные формы реализации технического решения, не отдаляясь от смысла изобретения. Варианты реализации изобретения могут предусматривать исполнение устройства с выносными датчиками, как схематически показано на Фиг. 2, 3, реализация устройства с беспроводным интерфейсом Wi-Fi или Bluetooth, возможность установки пьезокерамического датчика ультразвука для получения акустической сигнатуры в ультразвуковом диапазоне.
Раскрытые выше примеры выполнения приведены с целью показать промышленную применимость устройства и дать общее впечатление о возможностях предложенного аппарата. Объем правовой охраны технического решения определяется формулой изобретения, а не представленным описанием, и все изменения, совершенные с применением эквивалентных признаков, подпадают под правовую охрану настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для диагностики неисправностей оборудования электростанций | 2023 |
|
RU2815985C1 |
| Многоканальный распределенный волоконно-оптический датчик для мониторинга и охраны протяженных объектов | 2022 |
|
RU2797773C1 |
| СРЕДСТВО ЦВЕТОВОЙ ИДЕНТИФИКАЦИИ СОСТОЯНИЯ СИСТЕМЫ | 2023 |
|
RU2824435C1 |
| СПОСОБ И СИСТЕМА ПЛАНИРОВАНИЯ ПРОФИЛАКТИЧЕСКОГО ОБСЛУЖИВАНИЯ И РЕМОНТА ТЕХНОЛОГИЧЕСКОГО ОБОРУДОВАНИЯ НА ОСНОВЕ АКУСТИЧЕСКОЙ ДИАГНОСТИКИ С ПРИМЕНЕНИЕМ НЕЙРОННЫХ СЕТЕЙ | 2021 |
|
RU2764962C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2816667C1 |
| СПОСОБ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЦИЛИНДРОПОРШНЕВОЙ ГРУППЫ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2021 |
|
RU2794138C2 |
| СПОСОБ АУДИОВИЗУАЛЬНОГО РАСПОЗНАВАНИЯ СРЕДСТВ ИНДИВИДУАЛЬНОЙ ЗАЩИТЫ НА ЛИЦЕ ЧЕЛОВЕКА | 2022 |
|
RU2791415C1 |
| УСТРОЙСТВО ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2024 |
|
RU2831917C1 |
| Способ обнаружения и классификации морских целей на базе нейросетевых технологий и элементов искусственного интеллекта | 2021 |
|
RU2780606C1 |
| Система оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763384C1 |
Использование: для виброакустического анализа молотильно-дробильного оборудования. Сущность изобретения заключается в том, что устройство для виброакустического анализа молотильно-дробильного оборудования включает по меньшей мере один датчик для получения данных о вибрации, средства обработки данных с возможностью получения и извлечения из полученных от датчиков данных о режимах работы оборудования, при этом устройство снабжено по меньшей мере одним датчиком для получения данных об акустических колебаниях и средствами машинного обучения, выполненными в виде нейроморфного чипа и связанными со средствами обработки данных для распознавания и/или запоминания режимов работы оборудования. Технический результат: обеспечение возможности достоверного распознавания нештатных и потенциально аварийных режимов работы промышленного оборудования с вращающимися частями. 2 н. и 15 з.п. ф-лы, 4 ил.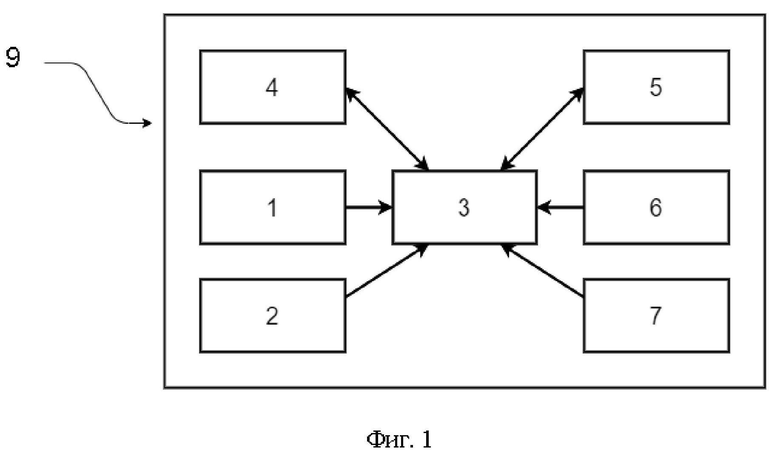
1. Устройство для виброакустического анализа молотильно-дробильного оборудования, включающее по меньшей мере один датчик для получения данных о вибрации, средства обработки данных с возможностью получения и извлечения из полученных от датчиков данных о режимах работы оборудования, отличающееся тем, что снабжено по меньшей мере одним датчиком для получения данных об акустических колебаниях и средствами машинного обучения, выполненными в виде нейроморфного чипа и связанными со средствами обработки данных для распознавания и/или запоминания режимов работы оборудования.
2. Устройство по п. 1, отличающееся тем, что выполнено с возможностью закрепления на оборудовании таким образом, что датчики улавливают вибрационные и акустические данные вращающихся частей.
3. Устройство по п. 1, отличающееся тем, что средства машинного обучения выполнены с возможностью кластеризации данных.
4. Устройство по п. 1, отличающееся тем, что снабжено источником питания.
5. Устройство по п. 1, отличающееся тем, что датчик вибрации выполнен с возможностью получения данных о вибрации по трем осям.
6. Устройство по п. 5, отличающееся тем, что датчик вибрации выполнен в виде акселерометра.
7. Устройство по п. 1, отличающееся тем, что датчик для получения данных об акустических колебаниях выполнен в виде микрофона.
8. Устройство по п. 1, отличающееся тем, что средства обработки данных выполнены в виде системы на кристалле.
9. Устройство по п. 1, отличающееся тем, что извлекаемыми данными являются математически преобразованные сигналы с датчиков, сформированные в вектор признаков.
10. Устройство по п. 1, отличающееся тем, что снабжено средствами вывода информации о режимах работы оборудования.
11. Способ виброакустического анализа молотильно-дробильного оборудования, включающий получение средствами обработки данных информации о вибрации и/или акустических колебаниях вращающихся частей оборудования, математическую обработку полученных данных с извлечением признаков, формирование вектора признаков и передачу на средства машинного обучения, выполненные в виде нейроморфного чипа, для распознавания и/или запоминания.
12. Способ по п. 11, отличающийся тем, что средства машинного обучения кластеризуют распознанные векторы признаков.
13. Способ по п. 12, отличающийся тем, что средствами машинного обучения кластерам присваивают категории, соответствующие режимам работы оборудования.
14. Способ по п. 11, отличающийся тем, что математическая обработка включает извлечение признаков из полученных данных о вибрации и/или акустических колебаниях посредством преобразований Фурье, вейвлет преобразований, эмпирическую модовую декомпозицию, эмпирическую кумулятивную функцию распределения.
15. Способ по п. 11, отличающийся тем, что полученные датчиками данные оцифровывают перед анализом средствами обработки данных.
16. Способ по п. 11, отличающийся тем, что обеспечивает вывод информации о режимах работы оборудования на средства отображения данных.
17. Способ по п. 11, отличающийся тем, что если средствами машинного обучения при распознавании переданного вектора признаков установлено, что если вектор признаков не изучен средствами машинного обучения, то указанный вектор признаков запоминается средствами машинного обучения и в последующем кластеризуется.
| МАТЕРИАЛЫ X МЕЖДУНАРОДНОЙ НАУЧНО- ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ "ИННОВАЦИОННЫЕ МАШИНОСТРОИТЕЛЬНЫЕ ТЕХНОЛОГИИ, ОБОРУДОВАНИЕ И МАТЕРИАЛЫ - 2019", ЧАСТЬ 2, Г | |||
| КАЗАНЬ, 5-6 ДЕКАБРЯ 2019, СТР | |||
| Аппарат для передачи изображений на расстояние | 1920 |
|
SU171A1 |
| ШАТАГИН ДМИТРИЙ АЛЕКСАНДРОВИЧ, ПОВЫШЕНИЕ ДИНАМИЧЕСКОЙ УСТОЙЧИВОСТИ ПРОЦЕССА РЕЗАНИЯ НА ОСНОВЕ ПОДХОДОВ НЕЛИНЕЙНОЙ ДИНАМИКИ И ИСКУССТВЕННОГО ИНТЕЛЛЕКТА, | |||

