Настоящее изобретение относится к жатке для зерноуборочного комбайна или рядковой жатке, причем упомянутая жатка включает в себя элементы для распознавания одного или более рабочих условий жатки для обеспечения по меньшей мере частичной автономности управления работой жатки или помощи оператору жатки для уменьшения степени участия оператора.
Уровень техники
Управление уборочным комбайном, осуществляемое оператором, во многих ситуациях является сложной задачей с множеством функций, которые нужно контролировать, для того чтобы уборочная машина скашивала эффективно и рационально, посредством предотвращения низких параметров срезания или даже остановки вследствие затора. Основная цель, естественно, состоит в том, чтобы сделать такие машины более автономными для уменьшения участия оператора. Уровень автономности может быть высоким, чтобы позволять таким машинам работать совершенно автономно, или может быть более низким, для того чтобы один оператор мог управлять одной или несколькими одинаковыми машинами в группе или просто уменьшить уровень квалификации или внимания одного оператора.
Многие участки уборочной машины являются сложными и требуют очень пристального внимания к рабочим условиям. Большое внимание уделяется мониторингу работы системы обмолота комбайна, для того чтобы автономно управлять данной системой. Параллельно уделяется внимание вычислению производительности комбайна посредством мониторинга высоты и плотности сельскохозяйственной культуры перед комбайном и сельскохозяйственной культуры, обрабатываемой в комбайне, в частности в приемной камере молотилки, для того чтобы оптимизировать эффективность системы обмолота.
Сущность изобретения
Варианты осуществления в данном документе предусматривают мониторинг множества различных условий процесса уборки урожая, и они могут использоваться независимо или в комбинации для поддержания потенциально автономного управления процессом уборки урожая.
В одном варианте осуществления для использования в частности в мониторинге обвивки мотовила, предусмотрено зерноуборочное устройство, содержащее:
уборочное транспортное средство, установленное на ходовых колесах для перемещения по грунту, поддерживающему сельскохозяйственную культуру на корню, для уборки;
жатку, содержащую режущий аппарат для срезания сельскохозяйственной культуры на корню и устройство транспортировки сельскохозяйственной культуры для
транспортировки сельскохозяйственной культуры на корню внутрь от концов жатки к сборному участку уборочного транспортного средства и мотовило, установленное выше режущего аппарата с возможностью вращения вокруг оси, параллельной режущему аппарату, для перемещения сельскохозяйственной культуры над режущим аппаратом к устройству транспортировки;
установочный узел для поддержания жатки на уборочном транспортном средстве;
средство обнаружения для обнаружения обвивки мотовила, в случае когда срезанная масса проходит по меньшей мере частично вокруг мотовила и остается на месте в течение более чем одного оборота мотовила, и генерирования сигнала в ответ на него;
и систему управления, выполненную с возможностью генерирования выходного сигнала в ответ на него и обеспечивающую в ответ на сигнал вывод управляющей информации в машину.
В одном варианте осуществления для использования в частности в мониторинге работы системы подачи в приемную камеру молотилки, упомянутая система отслеживает дифференциальные изменения скорости, и предусмотрена зерноуборочная машина, содержащая:
уборочное транспортное средство, установленное на ходовых колесах для перемещения по грунту, поддерживающему сельскохозяйственную культуру на корню, для уборки;
жатку, содержащую режущий аппарат для срезания сельскохозяйственной культуры на корню и устройство транспортировки сельскохозяйственной культуры для
транспортировки сельскохозяйственной культуры на корню внутрь от концов жатки к сборному участку уборочного транспортного средства и мотовило, установленное над режущим аппаратом с возможностью вращения вокруг оси, параллельной режущему аппарату, для перемещения сельскохозяйственной культуры над режущим аппаратом к устройству транспортировки;
установочный узел для поддержания жатки на уборочном транспортном средстве;
средство обнаружения для обнаружения различающихся интенсивностей потока сельскохозяйственной культуры на жатке в разных участках, так что обнаружение осуществляется, когда интенсивность на одном участке отличается от интенсивности на другом участке;
и систему управления, выполненную с возможностью генерирования выходного сигнала в ответ на него и обеспечивающую в ответ на сигнал вывод управляющей информации в машину.
В одном варианте осуществления для использования в частности в мониторинге полеглой сельскохозяйственной культуры, предусмотрена зерноуборочная машина, содержащая:
уборочное транспортное средство, установленное на ходовых колесах для перемещения по грунту, поддерживающему сельскохозяйственную культуру на корню, для уборки;
жатку, содержащую режущий аппарат для срезания сельскохозяйственной культуры на корню и устройство транспортировки сельскохозяйственной культуры для
транспортировки сельскохозяйственной культуры на корню внутрь от концов жатки к сборному участку уборочного транспортного средства и мотовило, установленное над режущим аппаратом с возможностью вращения вокруг оси, параллельной режущему аппарату, для перемещения сельскохозяйственной культуры над режущим аппаратом к устройству транспортировки;
установочный узел для поддержания жатки на уборочном транспортном средстве;
средство обнаружения для обнаружения, где срезаемая сельскохозяйственная культура по меньшей мере частично полегла так, что стебли сельскохозяйственной культуры расположены не вертикально;
и систему управления, выполненную с возможностью генерирования выходного сигнала в ответ на него и обеспечивающую в ответ на сигнал вывод управляющей информации в машину.
В одном варианте осуществления для использования в частности в мониторинге работы режущей системы, предусмотрена зерноуборочная машина, содержащая:
уборочное транспортное средство, установленное на ходовых колесах для перемещения по грунту, поддерживающему сельскохозяйственную культуру на корню, для уборки;
жатку, содержащую режущий аппарат для срезания сельскохозяйственной культуры на корню и устройство транспортировки сельскохозяйственной культуры для
транспортировки сельскохозяйственной культуры на корню внутрь от концов жатки к сборному участку уборочного транспортного средства и мотовило, установленное над режущим аппаратом с возможностью вращения вокруг оси, параллельной режущему аппарату, для перемещения сельскохозяйственной культуры над режущим аппаратом к устройству транспортировки;
установочный узел для поддержания жатки на уборочном транспортном средстве;
средство обнаружения для обнаружения наличия полоски несрезанной или плохо срезанной сельскохозяйственной культуры позади режущего аппарата и/или полосы взрыхленной почвы позади режущего аппарата;
и систему управления, выполненную с возможностью генерирования выходного сигнала в ответ на него и обеспечивающую в ответ на сигнал вывод управляющей информации в машину.
В одном варианте осуществления для использования в частности в мониторинге работы системы подачи в приемную камеры молотилки, причем упомянутая система осуществляет непрерывный контроль переходной зоны ленточной системы подачи, и предусмотрена зерноуборочная машина, содержащая:
уборочное транспортное средство, установленное на ходовых колесах для перемещения по грунту, поддерживающему сельскохозяйственную культуру на корню, для уборки;
жатку, содержащую режущий аппарат для срезания сельскохозяйственной культуры на корню;
систему полотенных транспортеров для транспортировки сельскохозяйственной культуры для транспортировки
сельскохозяйственной культуры на корню внутрь от концов жатки к сборному участку уборочного транспортного средства, включающую два боковых полотенных транспортера и центральный подающий полотенный транспортер, перемещающийся назад;
и мотовило, установленное над режущим аппаратом с возможностью вращения вокруг оси, параллельной режущему аппарату, для перемещения сельскохозяйственной культуры над режущим аппаратом к устройству транспортировки;
установочный узел для поддержания жатки на уборочном транспортном средстве;
средство обнаружения для обнаружения изменений в перемещении сельскохозяйственной культуры на полотенных транспортерах;
и систему управления, выполненную с возможностью генерирования выходного сигнала в ответ на него и обеспечивающую в ответ на сигнал вывод управляющей информации в машину.
В одном варианте осуществления для использования в частности в управлении потоком сельскохозяйственной культуры, предусмотрена уборочная машина или способ уборки урожая, который в частности использует конструкцию мотовила, содержащая:
уборочное транспортное средство, установленное на ходовых колесах для перемещения по грунту, поддерживающему сельскохозяйственную культуру на корню, для уборки;
жатку, содержащую режущий аппарат для срезания сельскохозяйственной культуры на корню и устройство транспортировки сельскохозяйственной культуры для
транспортировки сельскохозяйственной культуры на корню внутрь от концов жатки к сборному участку уборочного транспортного средства;
и мотовило, установленное с возможностью вращения вокруг оси, параллельной режущему аппарату, над режущим аппаратом, для перемещения сельскохозяйственной культуры над режущим аппаратом к устройству транспортировки;
причем мотовило содержит множество поперечно разделенных секций мотовила, установленных на множестве поперечно разнесенных установочных рычагах мотовила;
установочный узел для поддержания жатки на уборочном транспортном средстве;
средство обнаружения для обнаружения состояния сельскохозяйственной культуры перед режущим аппаратом и обеспечивающий в ответ на сигнал вывод управляющей информации в машину;
причем вывод управляющей информации в машину вызывает независимое регулирование установочных рычагов мотовила для независимого подъема и опускания одной из секций относительно по меньшей мере одной другой секции, чтобы по-разному размещать полеглые участки сельскохозяйственной культуры на широкой жатке.
В другом варианте осуществления настоящего изобретения предусмотрена зерноуборочная машина, содержащая:
уборочное транспортное средство, установленное на ходовых колесах для перемещения по грунту, поддерживающему сельскохозяйственную культуру на корню, для уборки;
жатку, содержащую режущий аппарат для срезания сельскохозяйственной культуры на корню;
систему полотенных транспортеров для транспортировки сельскохозяйственной культуры для транспортировки
сельскохозяйственной культуры на корню внутрь от концов жатки к сборному участку уборочного транспортного средства, включающую два боковых полотенных транспортера и центральный подающий полотенный транспортер, перемещающийся назад;
и мотовило, установленное над режущим аппаратом с возможностью вращения вокруг оси, параллельной режущему аппарату, для перемещения сельскохозяйственной культуры над режущим аппаратом к устройству транспортировки;
установочный узел для поддержания жатки на уборочном транспортном средстве;
систему обнаружения для обнаружения или прогнозирования возникновения затора в перемещении сельскохозяйственной культуры в упомянутую уборочную машину и выдачи выходного сигнала, указывающего на него;
и систему управления, выполненную с возможностью замедления и остановки работы двух боковых полотенных транспортеров в ответ на выходной сигнал.
Любой из выше признаков может быть использован в комбинации с любым другим одним или более из выше признаков либо независимо либо в комбинации.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором средство обнаружения следит за перемещением сельскохозяйственной культуры на подающем полотенном транспортере.
В любой из вариантов осуществления предусмотрено усовершенствование, в котором средство обнаружения следит за перемещением сельскохозяйственной культуры на заднем конце подающего полотенного транспортера.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором предусмотрен подающий валик над задним концом подающего полотенного транспортера и в котором средство обнаружения следит за перемещением сельскохозяйственной культуры прямо перед подающим валиком для обнаружения изменений в скорости на переходном участке перед входом в приемную камеру молотилки.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором транспортное средство содержит трактор с лафетной жаткой.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором автономно обнаруживаемое условие представляет собой любое прерывание в потоке
сельскохозяйственной культуры жатки позади режущего аппарата.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором автономно обнаруживаемое условие представляет собой высоту сельскохозяйственной культуры перед режущим аппаратом.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором автономно обнаруживаемое состояние представляет собой высоту сельскохозяйственной культуры, которая регистрируется посредством ультразвукового датчика высоты.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором обнаружение осуществляется посредством анализа ряда последовательных изображений для определения изменений в них, причем упомянутые изображения получаются посредством камеры, радара или лидара.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором обнаружение включает таблицу соответствия условий.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором вывод управляющей информации в машину вызывает перемещение мотовила вперед или назад.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором вывод управляющей информации в машину вызывает изменения в угле наклона зубьев мотовила.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором вывод управляющей информации содержит отображение информации на экране оператора, предупреждающее об обнаруженном условии.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором вывод управляющей информации предусматривает воздействие для прекращения перемещения вперед машины.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором обнаружение полегания
сельскохозяйственной культуры по меньшей мере частично осуществляется посредством анализа разности углов отклонения стеблей от вертикали.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором обнаружение полегания
сельскохозяйственной культуры по меньшей мере частично осуществляется посредством анализа разности углов отклонения стеблей от вертикали, получаемой посредством анализа изображений.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором обнаружение полегания
сельскохозяйственной культуры осуществляется посредством комбинации анализа разности углов отклонения стеблей от вертикали и обнаружения верхней части сельскохозяйственной культуры перед режущим аппаратом.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором выходной сигнал зависит от категоризации степени полегания.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором предусмотрен способ проведения различия между короткой сельскохозяйственной культурой и сельскохозяйственной культурой, имеющей малую высоту вследствие полегания.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором автономно обнаруживаемое условие представляет собой наличие полоски несрезанной или плохо срезанной сельскохозяйственной культуры позади режущего аппарата, которая обнаруживается посредством мониторинга высоты сельскохозяйственной культуры.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором автономно обнаруживаемое условие представляет собой полосу взрыхленной почвы позади режущего аппарата.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором почву позади режущего аппарата обнаруживают посредством разности по цвету между полосой и грунтом.
В любом из вариантов осуществления предусмотрено усовершенствование, в котором вывод управляющей информации в машину вызывает прекращения хода относительно грунта и поднятие режущего аппарата для очистки режущего аппарата от почвы и/или срезанной массы.
В одном варианте, вывод управляющей информации может просто содержать отображение информации на экране оператора, предупреждающее об обнаруженном условии. Однако в более автономной системе предпочтительно вывод управляющей информации обеспечивает воздействие на один или несколько управляемых элементов жатки, как более подробно описано ниже.
В некоторых вариантах осуществления, транспортное средство содержит комбайн, в котором центральная опора содержит приемную камеру молотилки. Однако многие из признаков в данном документе могут быть также применены к жатке на тракторе с лафетной жаткой. Жатка может включать режущий аппарат, а также во многих случаях данное изобретение может быть применено к вращательной жатке.
Система в данном документе может быть использована для непрерывного контроля одного рабочего условия жатки, как описано ниже, но для максимизации автономной работы системы можно осуществлять непрерывный контроль большинства или всех описанных условий. Выбор условий, подлежащих непрерывному контролю, зависит от того, предназначена ли данная система для совершенно автономного мониторинга работы жатки или же она используется только в качестве вспомогательного средства для оператора, находящегося в машине, который несет основную ответственность. Необходимо понимать, что более высокий уровень мониторинга может позволить оператору находиться в другом месте, например, в другом таком же транспортном средстве, работающем совместно с контролируемым транспортным средством, или даже в удаленном центральном пункте, управляющем группой транспортных средств.
В одном варианте осуществления, обнаруживаемое условие представляет собой обвивку мотовила, в случае когда срезанная масса проходит по меньшей мере частично вокруг мотовила и остается на месте в течение больше чем одного оборота мотовила. В этом случае, если обвивка становится слишком большой, обычно необходимо останавливать работу жатки и вручную удалять обвивку. Упомянутая система обнаружения может использовать множество разных систем, включая камеру, осуществляющую мониторинг мотовила вдоль его длины. С другой стороны, луч лазера вдоль жатки в одном угловом участке способен обнаруживать обвивку в любом продольном положении, если только обвивка является достаточной для достижения данного углового положения и достаточной для загораживания луча лазера.
В другой дополнительной особенности, автономно обнаруживаемое условие представляет собой интенсивность потока сельскохозяйственной культуры на жатке в одном или более участков.
В другой дополнительной особенности, автономно обнаруживаемое условие представляет собой различающиеся интенсивности потока сельскохозяйственной культуры на жатке в разных участках, так что обнаружение осуществляется, когда интенсивность в одном участке отличается от интенсивности в другом участке. Это может быть признаком неисправности в системе, а не только изменения в объеме поступающей сельскохозяйственной культуры.
В другой дополнительной особенности, автономно обнаруживаемое условие представляет собой любое прерывание в потоке сельскохозяйственной культуры на жатке позади режущего аппарата. Это может быть использовано для непрерывного контроля работы режущей системы, обычно режущего аппарата, где отдельные ножи могут подвергаться повреждению или забиванию. Другими словами, для того чтобы гарантировать равномерный и непрерывный поток, можно непрерывно контролировать поток срезанной массы над режущим аппаратом и на стол или ленту жатки, который должен выноситься транспортировочной системой. Если будут обнаружены какие-либо рассогласования, то это будет служить признаком неисправности режущей системы либо вследствие забивания либо вследствие поломки. Можно осуществлять мониторинг длинного режущего аппарата в зонах, обеспечивая сравнение между зонами для обнаружения рассогласований.
В дополнение к или в качестве альтернативы мониторингу позади режущего аппарата, обнаруживаемое условие может представлять собой интенсивность потока сельскохозяйственной культуры на транспортере, транспортер может представлять собой шнековую систему, однако более эффективный мониторинг может быть осуществлен на ленточной жатке, где интенсивность потока может быть обнаружена как скорость или как вес объема.
Одним важным участком, где мониторинг может обнаруживать проблемы, является интенсивность потока сельскохозяйственной культуры на входе уборочной машины. В полотенной жатке это подающий полотенный транспортер, который перемещает срезанную массу в приемную камеру молотилки. Если в данном участке срезанная масса замедляется, то это является признаком затора, вызываемого чрезмерно большой переполнением приемной камеры молотилки и может приводить к несоответствующей подаче в комбайн или к забиванию, прекращающему работу до очистки.
Поломка ножей и щитков режущего аппарата на жатках комбайнов является обычной проблемой. Сельскохозяйственная культура, почва или остатки сельскохозяйственной культуры также регулярно вызывают забивание ножей в некоторых условиях. Это можно рассматривать как прерывание в потоке сельскохозяйственной культуры жатки. Материал замедляется или нарастает и выходит из режущего аппарата комьями.
Проблемы полотенной жатки или шнека вызываются массой сельскохозяйственной культуры на одной или обеих сторонах жатки в результате задержки или полной остановки массы сельскохозяйственной культуры на транспортере. Если проблема в транспортере, то он может замедляться или совсем останавливаться, однако возможно, что транспортер работает механически исправно, а сельскохозяйственная культура просто не перемещается как требуется.
В переходном участке прямо перед приемной камерой молотилки, сельскохозяйственная культура обычно замедляется или останавливается прямо перед приемной камерой молотилки, поскольку масса сельскохозяйственной культуры изменяет направление перемещения от поперечного перемещения к перемещению назад к приемной камере молотилки. Кроме того, сельскохозяйственная культура должна подвергаться сильному сжатию, чтобы размещаться в приемной камере жатки, и это может вызывать проблемы потока.
Таким образом, вариант осуществления в данном документе использует по меньшей мере одну камеру для захвата видеоизображения потока сельскохозяйственной культуры через жатку в выше проблемных ключевых участках. Упомянутая видеоинформация передается в процессор, который использует слежение за предметом/частицей на основе движения для вычисления скоростей потока сельскохозяйственной культуры в видимых участках. Для того чтобы определить, существует ли проблема с потоком сельскохозяйственной культуры, программное обеспечение может выполнять различные сравнения. Целесообразно (но необязательно) разбивать упомянутую видеоинформацию на зоны и вычислять скорости потока в каждой зоне в виде скорости и направления для изображения данной зоны. Для анализа целесообразно также вводить ключевую рабочую переменную, такую как скорость относительно грунта, скорость полотенного транспортера, скорость мотовила и вид сельскохозяйственной культуры, тем самым можно оптимизировать ожидаемые скорости сельскохозяйственной культуры в каждой зоне для каждого условия. При использовании всей информации программное обеспечение может сравнивать скорость и направление каждой контролируемой зоны относительно друг друга. Если скорость или направление одной зоны не находится в пределах ожидаемого диапазона, то генерируется сигнал, указывающий на то, что существует проблема и что именно вызвало данную проблему. Программное обеспечение может также сравнивать выходные данные каждой зоны с таблицами соответствия, которые определяются существующими рабочими условиями, такими как скорость относительно грунта, скорость мотовила и др.
Другой областью, которую можно контролировать или обнаруживать, является эффективность режущей системы. Это применимо как к жатке с режущим аппаратом, так и к другим режущим системам, в частности роторным жаткам. Данное неэффективное срезающее действие проявляется в материала, остающемся на поле непосредственно позади режущего аппарата, когда он перемещается вперед.
В некоторых случаях неэффективное срезающее действие может быть определено по наличию полоски несрезанной или плохо срезанной сельскохозяйственной культуры позади режущего аппарата. Обычно такая полоска шириной в несколько дюймов является следствием локализованной неисправности, например, сломанного режущего ножа или застревания срезанной массы или почвы на режущем аппарате в локализованном положении. Данная полоска сельскохозяйственной культуры на корню может быть обнаружена посредством датчиков высоты, таких как ультразвуковые датчики, или посредством анализа изображений. Могут быть также использованы другие методы.
Если ненадлежащее срезание оказывает выталкивающее действие на почву, данное состояние может быть обнаружено посредством определения полосы взрыхленной почвы позади режущего аппарата. Предпочтительно это обнаруживается по различию по цвету или однородности цвета между данной полосой и расположенным рядом грунтом. Другими словами, взрыхленный грунт, появляющийся вследствие выталкивающего действия забивания в режущем аппарате, содержит меньше остатков сельскохозяйственной культуры и более однородный по цвету, и данное отличие может быть легко определено посредством анализа изображений.
Несрезанная полоса сельскохозяйственной культуры остается слева позади режущего аппарата в виде промежутка, промежуток может быть узким или широким, но представляет собой резкое изменение высоты стерни, которое означает, что что-то не так с режущим аппаратом.
В применениях, где жатка скашивает на грунте, режущая система жатки может забиваться почвой или остатками сельскохозяйственной культуры и начинать выталкивать материал перед режущим аппаратом. Визуальным индикатором данной проблемы является полоса почвы, которая сразу становится открытой. Данная открытая почва обычно отличается по цвету и плотности от почвы вокруг нее, делая ее легкой для обнаружение оператором.
Таким образом, желательно определять любое, или все, из условий, которые автоматически индицируют проблему срезания при использовании электронной системы. Во-первых, позади/под жаткой установлены ультразвуковые датчики (один или несколько), которые непрерывно считывают высоту стерни. Контроллер отслеживает данные, принимаемые в режиме реального времени из датчиков, отыскивая аномалии в высоте, которые по существу означают проблему с режущим аппаратом, которая приводит к большой высоте стерни. Если возникает такое положение, то передается сигнал, который показывает наличие проблемы и, возможно, локализацию данной проблемы на режущем аппарате. Дальнейшим использованием данного сигнала может быть сигнал предупреждения для оператора или может быть инициирование автоматического ответа посредством машины, чтобы попытаться установить проблему автономно.
Во-вторых, используются другие датчики, такие как радар, лидар, оптический датчик, в тех случаях, когда позади режущего аппарата установлена камера (одна или более), которая осуществляет непрерывное слежение за грунтом по всей ширине жатки. Контроллер анализирует поток изображений и отыскивает взрыхления в почве, которые соответствуют режущему аппарату, раскрывающему почву в результате забивания режущего аппарата. Основным индикатором для анализа является почва более темного цвета или более однородная по цвету (содержащая на себе меньше материала сельскохозяйственной культуры). Если такое условие обнаружено, то контроллер оповещает оператора или инициирует машинную функцию, чтобы попытаться очистить забивание посредством кратковременного подъема жатки.
В другом варианте осуществления, обнаруживаемое условие связано с наличием участка полеглой сельскохозяйственной культуры перед режущим аппаратом, которое может быть объединено с обнаружением высоты сельскохозяйственной культуры перед режущим аппаратом. В этом случае обнаружение может осуществляться также посредством анализа ряда последовательных изображений для определения изменений в них. При этом может быть использовано ультразвуковое обнаружение высоты или могут использоваться контактные датчики, которые входят в контакт с головками сельскохозяйственной культуры. Выходная информация из этих датчиков может быть использована для определения индикации высоты сельскохозяйственной культуры и для распознавания короткой сельскохозяйственной культуры от пригнутой или полеглой сельскохозяйственной культуры, которые должны подвергаться обработке совершенно по-разному во время работы зерноуборочного комбайна.
Таким образом, обнаружение полегания сельскохозяйственной культуры по меньшей мере частично осуществляется посредством анализа отклонения углов стеблей от вертикали, и данное отклонение может быть получено посредством анализа изображений, отыскивающего в разных изображениях стебли, наклоненные под разными углами, поскольку сельскохозяйственная культура может лежать продольно в направлении перемещения или поперек.
Таким образом, обнаружение полегания сельскохозяйственной культуры может быть осуществлено посредством комбинации анализа отклонения углов стеблей от вертикали и обнаружения верхней части сельскохозяйственной культуры перед режущим аппаратом. Выходной сигнал, полученный в результате данного анализа, может также зависеть от категоризации степени полегания, для того чтобы обеспечить вывод информации в уборочную машину для адаптации воздействия под степень и направление полегания.
Во время срезания сельскохозяйственной культуры лафетной жаткой или комбайном сельскохозяйственная культура обычно видна на разных высотах в разных участках поля. Обычно также видно, что отдельные участки поля полегли. Если сельскохозяйственная культура полеглая, то целесообразно внести изменения в жатку, чтобы лучше выпрямлять сельскохозяйственную культуру. Данные изменения включают опускание режущего аппарата, если срезание выше грунта, перемещение мотовила вперед, увеличение угла наклона пальца мотовила для более эффективного «подхватывания» сельскохозяйственной культуры.
При этом вариант осуществления в данном документе использует по меньшей мере одну камеру для захвата изображений или видеоинформации перед жаткой и их анализа для обнаружения полеглой сельскохозяйственной культуры. Основным признаком полеглой сельскохозяйственной культуры обычно является уменьшенная высота (подобная короткой сельскохозяйственной культуре), однако также важно, что растение уже расположено не вертикально. Программное обеспечение для обработки изображений отыскивает стебли/листья, чтобы определить угол, под которым они расположены, и сравнить его с известными значениями стоящей или полеглой сельскохозяйственной культуры. Это обычно не простой анализ типа «да-нет», поскольку сельскохозяйственная культура может иметь лишь небольшой наклон или может быть совсем горизонтальной или иметь некое промежуточное положение. Целесообразно оценить степень полегания в соответствии с категориями, каждая из которых требует разного реагирования от оператора или системы автоматического регулирования. Целесообразно также определить направление наклона, поскольку сельскохозяйственная культура, наклоняющаяся в сторону к или от жатки, будет требовать разных настроек жатки.
В другом признаке, который необходимо отслеживать, может быть также предусмотрена система для обнаружения обвивки мотовила, в тех случаях, когда срезанная масса проходит по меньшей мере частично вокруг мотовила и остается на месте в течение больше чем одного оборота мотовила. Исходя из данного обнаружения выходной сигнал вызывает вывод управляющей информации в машину, который может представлять собой индикацию для оператора или может автономно вызывать реагирование от машины, обычно когда мотовило на время приподнимают от сельскохозяйственной культуры и позволяют снять обвивку.
Другими словами, мотовило жатки подвержено обвивке или вообще «захвату». Как правило, если мотовило входит в контакт с сельскохозяйственной культурой слишком низко, оно скорее всего будет захватывать некоторый растительный материал. Данный захват приводит к потере зерна и может начинать обвивку мотовила, которое само не будет очищаться. Если система обнаруживает чрезмерный захват или обвивку, то она будет приподнимать мотовило от сельскохозяйственной культуры не некоторое время.
В ответ на многое из обнаруженного, вывод управляющей информации в машину вызывает уменьшение скорости относительно грунта. Однако в некоторых случаях вывод управляющей информации в машину вызывает прекращение хода относительно грунта и подъем режущего аппарата для очистки забивания режущего аппарата от почвы и/или срезанной массы. В других случаях вывод управляющей информации в машину вызывает перемещение мотовила либо вниз для обеспечения более активного процесса уборки урожая или вверх для устранения проблем обвивки. В других вариантах осуществления упомянутая система стремится привести мотовило в самое эффективное рабочее положение для состояний сельскохозяйственной культуры и скорости относительно грунта, так что система вызывает перемещение мотовила для изменения высоты мотовила. Упомянутая система может также вызывать вывод управляющей информации в машину, который вызывает перемещение мотовила вперед или назад и изменяет угол пальцев вокруг оси мотовила.
В тех случаях, когда мотовило образовано из отдельных секций, размещенных на отдельных рычагах поперек жатки, другой возможностью является выдача управляющей информации в машину, чтобы вызывать независимое регулирование установочных рычагов мотовила, чтобы по-разному адаптироваться к полеглым участкам сельскохозяйственной культуры.
Таким образом, полотенная жатка, раскрытая в данном документе, в основном состоит из левой и правой ленты для перемещения сельскохозяйственной культуры, а также центрального подающего транспортера, который перемещает сельскохозяйственную культуру на подающий барабан, который затем подает срезанную сельскохозяйственную культуру на наклонный транспортер в приемную камеру молотилки комбайна.
Неравномерно распределенная сельскохозяйственная культура обычно образует большой шар или ком сельскохозяйственной культуры, который затем перемещается на центральный подающий транспортер или подающий барабан. Данный транспортер обычно представляет собой валик, установленный над выпускным отверстием в приемную камеру молотилки, который содержит винтовые секции шнека для перемещения материала внутри концов жатки к отверстию. Данный валик часто немного длиннее выпускного отверстия, а в некоторых случаях валик продолжается по всей ширине жатки.
Когда большой шар или ком срезанной массы перемещается на подающий барабан, подающий барабан обычно оказывается перегруженным и прекращает вращаться или останавливается. Данная перегрузка возможна также дальше по потоку в наклонном транспортере комбайна или даже позднее в устройстве для обработки сельскохозяйственной культуры комбайна. В любом случае, упомянутая перегрузка в некоторых случаях может быть обнаружена посредством реальной остановки или замедления подающего элемента, такого как подающий барабан.
В других случаях упомянутая перегрузка прогнозируется при использовании датчиков движения, описанных в данном документе, так что наличие факторов, которые приводят к затору или остановке, прогнозируется заранее раньше, чем действительно происходит остановка.
Когда возникает перегрузка или обнаруживаются факторы, показывающие, что она может произойти, приводы жатки обычно продолжают работать нормально, которая продолжает скашивать сельскохозяйственную культуру, и перемещают ее внутрь на центральный подающий транспортер. При этом больше срезанной массы добавляется к первоначальному шару или кому сельскохозяйственной культуры, дополнительно затрудняя процесс очистки забивания. Это может приводить к тому, что оператор зерноуборочного комбайна вынужден вылезать из кабины комбайна, чтобы вручную удалять шар или ком срезанной массы. Все это уменьшает общую производительность уборочной машины.
В данном варианте осуществления предусмотрена система, которая останавливает или замедляет правый или левый транспортеры, которая останавливает внутреннее перемещение срезанной массы к центральному подающему транспортеру при обнаружении остановки центрального подающего барабана или при обнаружении факторов, которые индицируют или прогнозируют, что такая остановка вот-вот произойдет. Это может также происходить при обнаружении остановки наклонного транспортера комбайна или устройства обработки сельскохозяйственной культуры комбайна.
Другими словами, как только упомянутая остановка обнаружена или прогнозируется, перемещение боковых полотенных транспортеров мгновенно прекращается, так что прекращается подача сельскохозяйственной культуры к центральному подающему полотенному транспортеру. Необходимо понимать, что в современных очень широких жатках значительный объем сельскохозяйственной культуры размещается на боковых полотенных транспортерах и будет подаваться на подающий полотенный транспортер, если данное перемещение мгновенно не прекращено. Таким образом, даже если затор обнаружен раньше, чем он возникает, затор может быть реально вызван посредством дополнительного перемещения сельскохозяйственной культуры на боковых полотенных транспортерах, если они не остановлены. Кроме того, если затор не прогнозируется, но обнаружен после того, как он происходит посредством остановки подающего элемента, данный затор усугубляется подачей дополнительного материала в затор.
Управление перемещением вперед уборочной машины обычно осуществляется водителем, так что остановка машины осуществляется водителем, как только он получает информацию об обнаружении затора. При этом в машине могут быть предусмотрены средства управления, которые реально прекращают перемещение вперед машины при получении сообщения о заторе или остановке работы боковых полотенных транспортеров в ответ на обнаружение затора.
Упомянутая система также выполнена с возможностью задержки повторного запуска боковых полотенных транспортеров после устранения затора и повторного запуска работы системы. Другими словами, после обнаружения повторного запуска остановленного подающего элемента, привод для боковых полотенных транспортеров удерживается неподвижным в течение некоторого периода времени, чтобы позволить определенному количеству сельскохозяйственной культуры в системе подачи пройти в молотилку комбайна, прежде чем больше материала будет подано с боковых полотенных транспортеров. Время задержки вычисляется исходя из известной нормальной скорости подачи относительно вычисления количества избыточного материала в системе. Данное количество может быть усреднено исходя из предыдущей информации или может быть обнаружено посредством измерения различных параметров в самом заторе, например, высоты сбившегося в кучу материала в заторе. Другими словами, левый и правый транспортеры не продолжают перемещение в течение некоторого времени после того, как успешно устранен первоначальный затор.
Кроме того, когда затор прогнозируется, а не реально обнаружен, скорость работы боковых полотенных транспортеров замедляется, по желанию при замедлении скорости перемещения вперед машины, чтобы дать возможность системе предотвратить потенциальный затор, а не позволить ему произойти.
Таким образом, вышеописанный вариант осуществления может работать так, чтобы останавливать боковые полотенные транспортеры в случае обнаружения или прогнозирования затора в системе подачи.
Таким образом, вышеописанный вариант осуществления может работать так, чтобы замедлять боковые полотенные транспортеры в случае прогнозирования затора в системе подачи.
Таким образом, вышеописанный вариант осуществления может работать так, чтобы прекращать перемещение вперед машины.
Краткое описание чертежей
Ниже будет описан один вариант осуществления изобретения со ссылкой на сопроводительные чертежи, из которых:
Фиг. 1 представляет собой схематичный вид сверху зерноуборочного комбайна, включающего узел жатки в соответствии с настоящим изобретением.
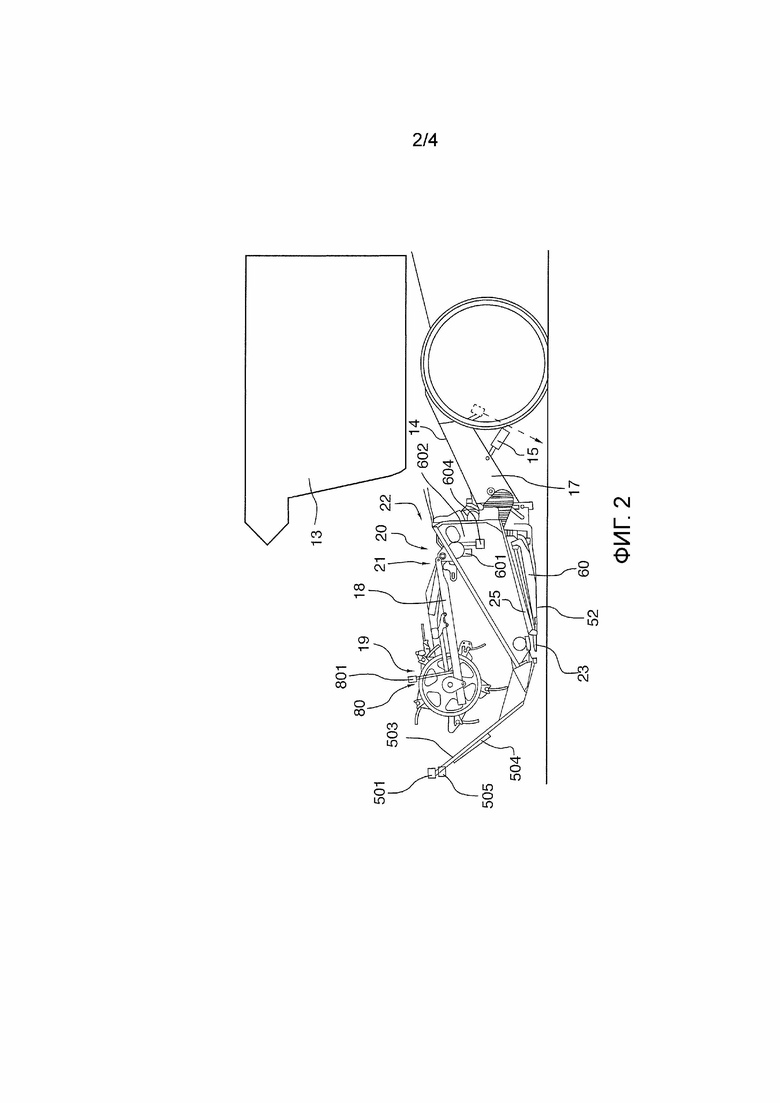
Фиг. 2 представляет собой схематичный вид в разрезе приемной камеры молотилки зерноуборочного комбайна в соответствии с фиг. 1.
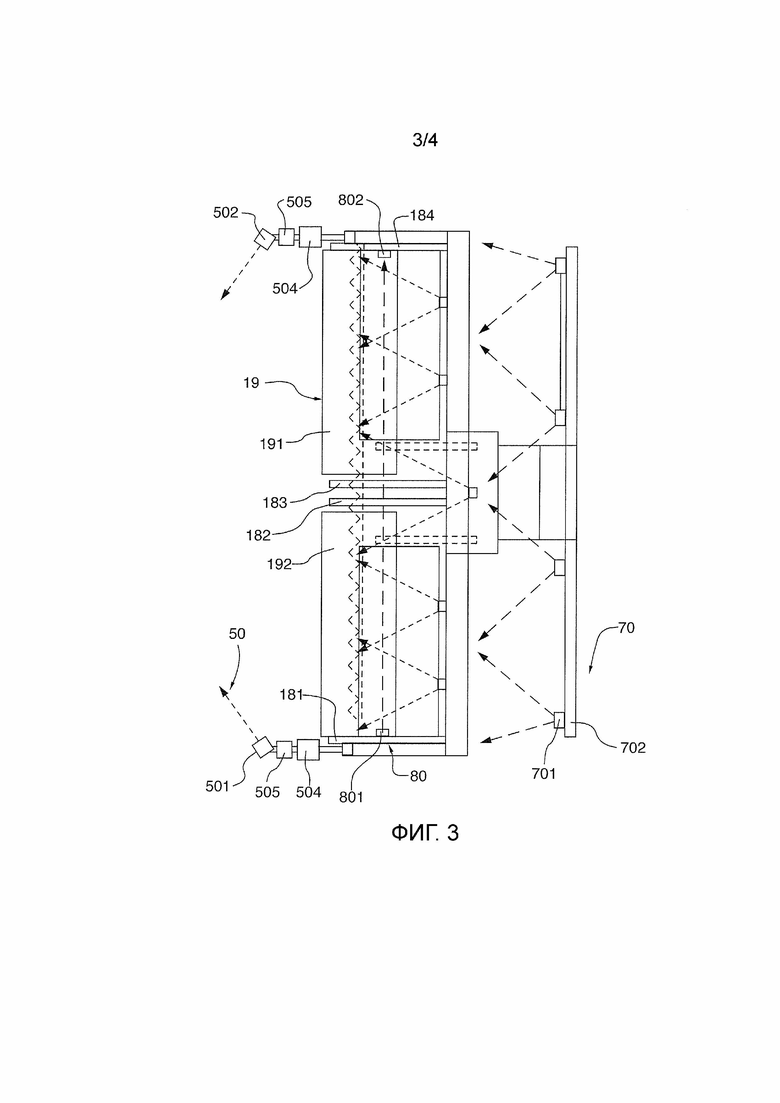
Фиг. 3 представляет собой вид сверху только жатки зерноуборочного комбайна в соответствии с фиг. 1.
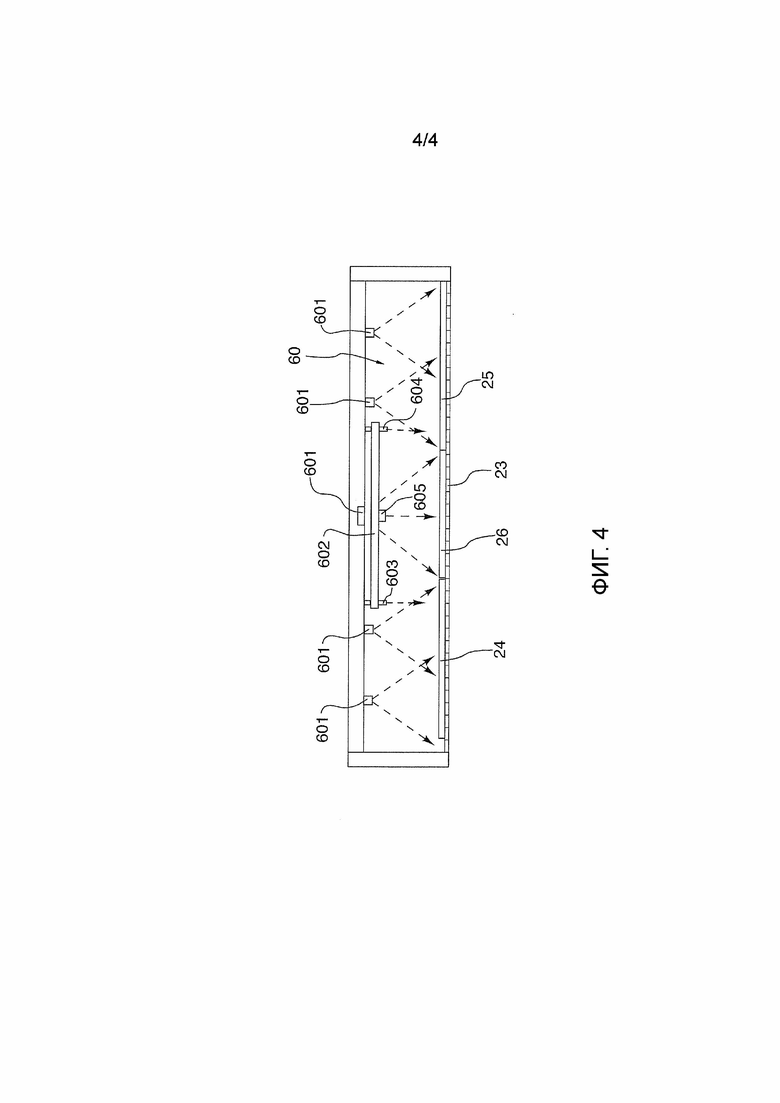
Фиг. 4 представляет собой вид спереди только жатки зерноуборочного комбайна в соответствии с фиг. 1.
В разных чертежах одинаковые ссылочные позиции показывают соответствующие детали.
Подробное описание
Транспортное средство, такое как комбайн, показано схематично ссылочной позицией 10 и включает в себя ходовые колеса 11, основной корпус 12, содержащий устройства обработки сельскохозяйственной культуры, кабину 13 для оператора и приемную камеру 14 молотилки для приема срезанной массы и подачи ее в корпус для обработки. Детали комбайнов хорошо известны специалисту в данной области техники, так что для понимания данного изобретения более подробная информация не требуется.
Приемная камера молотилки установлена на корпусе с возможностью подъема и опускания, чтобы поднимать жатку, поддерживаемую на передней стороне комбайна. Например, приемная камера молотилки включает цилиндры 15, 16, которые поднимают и опускают передний конец 17 приемной камеры молотилки, чтобы поднимать и опускать жатку при необходимости.
Узел 20 жатки включает жатку 21 и адаптер 22, который прикрепляет жатку к приемной камере 14 молотилки. Адаптер выполнен с возможностью управления подачей материала в приемную камеру молотилки и приложения приподнимающего усилия к жатке 21 для перемещения ее вперед на переднем конце 17 приемной камеры 14 молотилки. Адаптер включает плавающую подвеску с использованием пружин или системы цилиндров, позволяющих жатке плавать вверх и вниз относительно приемной камеры молотилки.
Жатка в целом имеет обычную конструкцию, хорошо известную специалисту в данной области техники, и основные элементы включают режущий аппарат 23 для срезания сельскохозяйственной культуры на корню и устройство транспортировки сельскохозяйственной культуры, образованное посредством пары полотенных транспортеров 24 и 25 для транспортировки сельскохозяйственной культуры на корню внутрь от концов жатки к сборному участку 26 для подачи в комбайн. Мотовило 19 установлено над режущим аппаратом 23 на рычагах 18, посредством чего можно изменять высоту мотовила для изменения расстояния между планками мотовила и режущим аппаратом 23. Мотовило может скользить вперед и назад на рычагах 18, для того чтобы изменять положение мотовила относительно режущего аппарата. Управление перемещением пальцев мотовила, как известно, осуществляется посредством эксцентриковой системы, чтобы обеспечивать выбранную схему перемещения пальцев, когда мотовило вращается вокруг своей оси. Можно регулировать положение эксцентрика посредством угла поворота вокруг оси, для того чтобы изменять угловое положение, в котором расположены некоторые пальцы. Оба эти перемещения осуществляются посредством цилиндров управления или посредством других средств, которые позволяют регулировать их посредством системы 301 управления. Кроме того, мотовило образовано из двух секций 191 и 192, расположенных рядом с поддерживаемых на рычагах 181, 182, 183 и 184, позволяющих осуществлять независимое регулирование двух секций мотовила. независимое регулирование можно осуществлять в отношении одного или более из высоты, положения вперед-назад и угла пальца по необходимости. Таким образом, независимое регулирование может быть использовано, когда сельскохозяйственная культура находится в разных состояниях по высоте и/или полеганию по ширины жатки. Для обеспечения такого независимого управления могут быть предусмотрены дополнительные датчики на участке между мотовилами, чтобы обеспечивать независимую оценку сельскохозяйственной культуры.
Жатка может находиться в контакте с грунтом, так что часть веса переносится на плавающую систему, а часть оказывает усилие на грунт. В качестве альтернативы, жатка может включать в себя два колеса, сцепляющиеся с землей, по одному на каждой стороне адаптера 22. В некоторых случаях количество колес может быть увеличено, так что используют сдвоенные колеса или колеса на оси, однако преимущественно колеса действуют так, чтобы поддерживать жатку с каждой стороны опоры, обеспечиваемой адаптером 22.
Соединение между адаптером и жаткой может включать систему 30 подвески с центральным верхним звеном 32 и двумя боковыми рычагами 33 и 34 подвески для поддержания жатки на адаптере. Как хорошо известно, система подвески обеспечивает поперечное покачивание жатки относительно адаптера, а также вертикальное плавающее перемещение жатки. Таким образом, рычаги 33 и 34 подвески включают пружины с регулируемым усилием для изменения приподнимающего усилия, прикладываемого к жатке от адаптера. Или система подвески может использовать плавающую систему цилиндров, выполненную с возможностью управления и изменения подъемного усилия для изменения усилия на грунт.
Система управления включает блок 300 управления, который реагирует на ввод информации из нескольких сенсорных систем, которые отслеживают некоторые действия жатки.
Таким образом, упомянутые сенсорные системы включают первую сенсорную систему 50, которая содержит датчики 501 и 502, установленные на опорах 503 на концевых пластинах жатки и выступающие вперед от поперечной линии режущего аппарата для мониторинга сельскохозяйственной культуры перед жаткой, когда сельскохозяйственная культура приближается к режущему аппарату. Датчики 501, 502 могут содержать устройства, такие как камера или лидар, для генерирования потока изображений приближающейся сельскохозяйственной культуры. Или упомянутые датчики могут содержать систему формирования изображения и ультразвуковой датчик 505 высоты, который обнаруживает верхнюю часть приближающейся сельскохозяйственной культуры. Датчики для высоты и изображения могут быть расположены в одинаковых положениях на жатке или разных положениях для максимально эффективного обнаружения приближающейся сельскохозяйственной культуры. В другой альтернативе датчики высоты могут быть предусмотрены в виде контактных датчиков 504 для физического контакта с головками сельскохозяйственной культуры.
Упомянутая сенсорная система включает вторую сенсорную систему 60, которая следит за потоком материала на жатке. Даная система включает множество датчиков 601, расположенных в ряд над и позади режущего аппарата в соответствующем фиксированном участке на раме жатки или на установочном элементе, прикрепленном к раме жатки. Упомянутые датчики обеспечивают линию прямой видимости жатки непосредственно позади режущего аппарата, чтобы отслеживать сельскохозяйственную культуру, перемещающуюся назад над режущим аппаратом к полотенным транспортерам. Каждый датчик 601 содержит камеру, которая генерирует ряд последовательных изображений одного участка жатки, так что в совокупности посредством ряда последовательных изображений, направляемых в блок 300 управления, осуществляется слежение за всем режущим аппаратом.
Вторая сенсорная система 60 дополнительно содержит другой комплект камер 603, 604 и 605, установленных на опоре 602, прикрепленной к раме. Камеры 603 и 604 расположены над полотенными транспортерами 24 и 25 соответственно, для того чтобы отслеживать срезанную массу на них. Камера 605 расположена над полотенным транспортером 26, подающим назад в приемную камеру молотилки комбайна. Данные камеры также генерируют ряд изображений, которые сравниваются для обнаружения интенсивности потока срезанной массы.
Упомянутая сенсорная система включает третью сенсорную систему 70, которая следит за состоянием сельскохозяйственной культуры на поле позади режущей системы. Данная сенсорная система включает ряд датчиков или камер 701, поддерживаемых на соответствующей опоре, такой как зафиксированный участок рамы позади жатки. В поле зрения данных камер находится грунт позади режущего аппарата и перед ходовыми колесами комбайна, для того чтобы осуществлять контроль эффективности срезания. Упомянутые датчики могут представлять собой камеры или могут включать ультразвуковые датчики высоты.
Упомянутая сенсорная система включает четвертую сенсорную систему 80, которая отслеживает любую обвивку сельскохозяйственной культуры вокруг мотовила. Данная сенсорная система включает по меньшей мере один датчик 801, установленный в неподвижном положении относительно мотовила в одном конце мотовила, который генерирует луч лазера вдоль мотовила в одном угловом положении вокруг мотовила, так что мотовило вращается позади луча, луч расположен так, что он обнаруживает наличие срезанной массы, которая загораживает луч. Система слежения способна отличать наличие материала, который полностью обвивается, от срезанной массы, которая только временно перемещается назад над мотовилом, посредством анализа периода времени, в течение которого луч загорожен. Таким образом, упомянутая система способна обнаруживать, когда срезанная масса проходит по меньшей мере частично вокруг мотовила и остается на месте в течение больше чем одного оборота мотовила.
Система 300 управления дополнительно включает выводы 90. Данные выводы включают дисплей 901 для оператора в кабине или в удаленном участке. Данные выводы включают выводы 902, 903, 904 в систему 40 управления комбайна для обеспечения выводов 401, 402 и 403 для управления скоростью относительно грунта, высотой жатки и положением мотовила.
Сенсорная система 50 выполнена с возможностью выдачи информации о наличии полеглой сельскохозяйственной культуры, лежащей на или параллельно грунту. Данную информацию можно генерировать посредством анализа изображений, отыскивающего углы наклона стеблей сельскохозяйственной культуры, обнаруживаемые посредством камер 501, 502. Могут быть также использованы другие методы обнаружения, включающие головные датчики, и посредством датчиков грунта, поскольку головные датчики способны обнаруживать положение верхней части сельскохозяйственной культуры в положении, значительно ниже положения ожидаемых головок сельскохозяйственной культуры. Это является признаком наличия перед жаткой полеглой сельскохозяйственной культуры. Датчики грунта могут также обнаруживать полеглую сельскохозяйственную культуру, поскольку они способны обнаруживать отражения от высоты, значительно выше поверхности грунта, когда режущий аппарат проходит над полеглой сельскохозяйственной культурой. Данная информация может быть использована в алгоритме процессора для выдачи оператору или в систему управления комбайна информации, которая предписывает комбайну срочно опустить режущий аппарат на грунт, чтобы подхватывать полеглую сельскохозяйственную культуру. Кроме того, в комбайн либо непосредственно в системы управления комбайном либо оператору может быть выдана команда опустить мотовило, так чтобы планки мотовила занимали положение прямо около режущего аппарата, чтобы поднимать полеглую сельскохозяйственную культуру над режущим аппаратом. Контроллер может также использовать высоту мотовила в зависимости от вывода из системы, определяющего высоту растительного покрова, для того чтобы надлежащим образом размещать мотовило относительно режущего аппарата для обеспечения эффективного срезания.
Блок управления также принимает сигнал скорости, который позволяет осуществлять управление высотой режущего аппарата, которое должно осуществляться с требуемой скоростью изменения, зависящей от скорости движение вперед транспортного средства.
В соответствии с одним усовершенствованием вышеописанный вариант осуществления предусматривает систему для автономного обнаружения одного или более условий работы жатки для генерирования выходного сигнала в ответ на него и обеспечения в ответ на сигнал вывод управляющей информации в машину.
Вывод управляющей информации может представлять собой просто дисплей 901 для оператора, предупреждающий об обнаруженном условии. Однако более предпочтительно упомянутая система предусматривает выводы 902, 903 и 904 управляющей информации, которая оказывает воздействие на один или более управляемых элементов жатки и в частности скорость относительно грунта, высоту жатки положение мотовила.
Система 60 может быть использована для обнаружения разных интенсивностей потока сельскохозяйственной культуры на жатке в разных участках, так что обнаружение осуществляется, когда интенсивность на одном участке отличается от интенсивности на другом участке. Это может указывать на проблему в системе, а не просто временное уменьшение общего потока сельскохозяйственной культуры. Как описано выше, система способна обнаруживать любое нарушение в потоке сельскохозяйственной культуры жатки непосредственно позади режущего аппарата, которое является признаком локальной проблемы в режущем аппарате, как показывает прекращение потока сельскохозяйственной культуры в одном участке. Сравнение между разными зонами режущего аппарата может также обеспечить индикацию дополнительных проблем и позволить отличить от аномалий, не связанных с проблемами срезания, таких как участки без растительности на поле. мониторинг может использовать время в качестве фактора для того, чтобы отличать временные аномалии от заторов или поломок, требующих специального действия.
Как описано выше, система 60 может также выдавать информацию об интенсивности потока сельскохозяйственной культуры на транспортерах 24, 25 и также интенсивности потока сельскохозяйственной культуры на транспортере 26 на входе в уборочную машину. Упомянутая система может использовать сравнение интенсивностей между разными участками для выявления проблем неисправностей в системе транспортировки. Кроме того, интенсивность потока на входе в приемную камеру молотилки в частности выявляет проблему в том смысле, что замедление интенсивности потока индицирует загромождение сельскохозяйственной культуры, которое обычно вызывается чрезмерной подачей в приемную камеру молотилки, которая может приводить к подаче комками в комбайн или, что более важно, к потенциальному затору.
Позади режущего аппарата, условием, обнаруживаемым посредством системы 70, является наличие полоски несрезанной или плохо срезанной сельскохозяйственной культуры позади режущего аппарата или полосы взрыхленной почвы позади режущего аппарата.
Как описано выше, обнаружение преимущественно осуществляется посредством анализа ряда последовательных изображений для определения изменений в изображениях. Они могут быть использованы для обнаружения изменений в интенсивности или изменений в положении и состоянии сельскохозяйственной культуры, такого как высота или угол наклона. Упомянутые изображения могут быть получены посредством разных систем формирования изображений, включающих камеру, радар или лидар. Упомянутые датчики могут также включать ультразвуковой датчик высоты.
Вывод в комбайн может включать следующее:
a. вывод управляющей информации в машину вызывает уменьшение скорости перемещения относительно грунта;
b. прекращение перемещения относительно грунта и подъем режущего аппарата для очистки забивания режущего аппарата от почвы и/или срезанной массы,
c. перемещение мотовила для изменения высоты мотовила,
d. перемещение мотовила вперед или назад,
e. изменения угла наклона пальцев мотовила,
f. независимое регулирование установочных рычагов 181, 182, 183 и 184 мотовила для размещения полеглых участков сельскохозяйственной культуры на широкой жатке,
д. остановку системы привода для боковых полотенных транспортеров 24, 25 в случае обнаружения или прогнозирования затора в системе подачи,
h. остановку боковых лент 24 и 25 в случае обнаружения или прогнозирования затора в системе подачи,
j. обеспечение задержки повторного запуска боковых полотенных транспортеров после устранения затора и осуществления повторного запуска системы. Другими словами, после обнаружения повторного запуска остановленного элемента подачи, привод для боковых лент удерживается неподвижным в течение некоторого периода времени, чтобы позволить количеству сельскохозяйственной культуры в системе подачи пройти в молотилку комбайна, прежде чем будет подано больше материала с боковых полотенных транспортеров,
k. в случае если затор прогнозируется, а не реально обнаружен, скорость работы боковых полотенных транспортеров должна быть замедлена, по желанию при замедлении скорости движения вперед машины, для того чтобы дать возможность системе предотвратить потенциальный затор, а не позволить ему произойти.
Полегание сельскохозяйственной культуры обнаруживается посредством комбинации анализа отклонения углов стеблей от вертикали и обнаружения верхней части сельскохозяйственной культуры перед режущим аппаратом, и выходной сигнал зависит от определения категоризации степени полегания. Максимально эффективное управление может быть обеспечено посредством генерирования выходного сигнала, зависящего от разных величин из таблицы соответствия.

Группа изобретений относится к сельскому хозяйству. Устройство для уборки сельскохозяйственной культуры содержит уборочное транспортное средство (10), установленное на ходовых колесах (11) для перемещения по грунту, поддерживающему сельскохозяйственную культуру на корню, для сборки; жатку (20), содержащую режущий аппарат (23) для срезания сельскохозяйственной культуры на корню и полотенную систему транспортировки сельскохозяйственной культуры для транспортировки сельскохозяйственной культуры на корню внутрь от концов жатки (20) к сборному участку (26) уборочного транспортного средства (10), включающую два боковых полотенных транспортера (24, 25) и центральный подающий полотенный транспортер, перемещающийся назад; мотовило, установленное над режущим аппаратом (23) с возможностью вращения вокруг оси, параллельной режущему аппарату (23), для перемещения сельскохозяйственной культуры над режущим аппаратом (23) к устройству транспортировки, и содержащее множество поперечно разделенных секций мотовила, установленных на множестве поперечно разнесенных установочных рычагов мотовила; установочный узел для поддержания жатки (20) на уборочном транспортном средстве (10). Устройство для уборки сельскохозяйственной культуры содержит средство обнаружения, предназначенное для: обнаружения обвивки мотовила, когда срезанная масса проходит по меньшей мере частично вокруг мотовила и остается на месте в течение более чем одного оборота мотовила, и для генерирования сигнала в ответ на него, причем средство обнаружения генерирует луч лазера на мотовило и обнаруживает обвивку мотовила путем обнаружения материала, загораживающего луч лазера; или обнаружения наличия полоски несрезанной или плохо срезанной сельскохозяйственной культуры позади режущего аппарата (23) и/или полосы взрыхленной почвы позади режущего аппарата (23); или обнаружения изменений в перемещении сельскохозяйственной культуры на полотенных транспортерах (24, 25) с использованием ряда изображений; или обнаружения состояния сельскохозяйственной культуры перед режущим аппаратом (23) и обеспечения в ответ на сигнал вывод управляющей информации в машину, где вывод управляющей информации в машину (10) вызывает независимое регулирование установочных рычагов мотовила для независимого подъема и опускания одной из секций относительно по меньшей мере одной другой секции, чтобы по-разному размещать полеглые участки сельскохозяйственной культуры на жатке (23); или обнаружения или прогнозирования затора в перемещении сельскохозяйственной культуры в уборочную машину (10) и выдачи выходного сигнала, указывающего на него, где средство обнаружения использует ряд изображений сельскохозяйственной культуры на одном из боковых полотенных транспортерах (24, 25) или центральном подающем полотенном транспортере для обнаружения или прогнозирования возникновения затора. Устройство для уборки сельскохозяйственной культуры содержит систему управления (40), выполненную с возможностью генерирования выходного сигнала в ответ на него и обеспечивающую в ответ на сигнал вывод управляющей информации в машину (10), например, посредством замедления или прекращения работы двух боковых полотенных транспортеров (24, 25) в ответ на выходной сигнал. Обеспечивается автономность управления работой жатки. 5 н. и 22 з.п. ф-лы, 4 ил.
1. Устройство для уборки сельскохозяйственной культуры, содержащее:
уборочное транспортное средство, установленное на ходовых колесах для перемещения по грунту, поддерживающему сельскохозяйственную культуру на корню, для сборки;
жатку, содержащую режущий аппарат для срезания сельскохозяйственной культуры на корню и устройство транспортировки сельскохозяйственной культуры для транспортировки сельскохозяйственной культуры на корню внутрь от концов жатки к сборному участку уборочного транспортного средства и мотовило, установленное над режущим аппаратом с возможностью вращения вокруг оси, параллельной режущему аппарату, для перемещения сельскохозяйственной культуры над режущим аппаратом к устройству транспортировки;
установочный узел для поддержания жатки на уборочном транспортном средстве;
средство обнаружения для обнаружения обвивки мотовила, когда срезанная масса проходит по меньшей мере частично вокруг мотовила и остается на месте в течение более чем одного оборота мотовила, и для генерирования сигнала в ответ на него, причем средство обнаружения генерирует луч лазера на мотовило и обнаруживает обвивку мотовила путем обнаружения материала, загораживающего луч лазера;
и систему управления, выполненную с возможностью генерирования выходного сигнала в ответ на него и обеспечивающую в ответ на сигнал вывод управляющей информации в машину.
2. Устройство для уборки сельскохозяйственной культуры, содержащее:
уборочное транспортное средство, установленное на ходовых колесах для перемещения по грунту, поддерживающему сельскохозяйственную культуру на корню, для уборки;
жатку, содержащую режущий аппарат для срезания сельскохозяйственной культуры на корню и устройство транспортировки сельскохозяйственной культуры для транспортировки сельскохозяйственной культуры на корню внутрь от концов жатки к сборному участку уборочного транспортного средства и мотовило, установленное над режущим аппаратом с возможностью вращения вокруг оси, параллельной режущему аппарату, для перемещения сельскохозяйственной культуры над режущим аппаратом к устройству транспортировки;
установочный узел для поддержания жатки на уборочном транспортном средстве;
средство обнаружения для обнаружения наличия полоски несрезанной или плохо срезанной сельскохозяйственной культуры позади режущего аппарата и/или полосы взрыхленной почвы позади режущего аппарата; и
систему управления, выполненную с возможностью
генерирования выходного сигнала в ответ на него и обеспечивающую в ответ на сигнал вывод управляющей информации в машину.
3. Устройство для уборки сельскохозяйственной культуры, содержащее:
уборочное транспортное средство, установленное на ходовых колесах для перемещения по грунту, поддерживающему сельскохозяйственную культуру на корню, для уборки;
жатку, содержащую режущий аппарат для срезания сельскохозяйственной культуры на корню;
полотенную систему транспортировки сельскохозяйственной культуры для транспортировки сельскохозяйственной культуры на корню внутрь от концов жатки в сборный участок уборочного транспортного средства, включающую два боковых полотенных транспортера и центральный подающий полотенный транспортер, перемещающийся назад;
и мотовило, установленное над режущим аппаратом с возможностью вращения вокруг оси, параллельной режущему аппарату, для перемещения сельскохозяйственной культуры над режущим аппаратом к устройству транспортировки;
установочный узел для поддержания жатки на уборочном транспортном средстве;
средство обнаружения для обнаружения изменений в перемещении сельскохозяйственной культуры на полотенных транспортерах с использованием ряда изображений;
и систему управления, выполненную с возможностью генерирования выходного сигнала в ответ на него и обеспечивающую в ответ на сигнал вывод управляющей информации в машину.
4. Устройство для уборки сельскохозяйственной культуры, содержащее:
уборочное транспортное средство, установленное на ходовых колесах для перемещения по грунту, поддерживающему сельскохозяйственную культуру на корню, для уборки;
жатку, содержащую режущий аппарат для срезания сельскохозяйственной культуры на корню и устройство транспортировки сельскохозяйственной культуры для транспортировки сельскохозяйственной культуры на корню внутрь от концов жатки к сборному участку уборочного транспортного средства;
и мотовило, установленное над режущим аппаратом с возможностью вращения вокруг оси, параллельной режущему аппарату, для перемещения сельскохозяйственной культуры над режущим аппаратом к устройству транспортировки;
причем мотовило содержит множество поперечно разделенных секций мотовила, установленных на множестве поперечно разнесенных установочных рычагов мотовила;
установочный узел для поддержания жатки на уборочном транспортном средстве;
средство обнаружения для обнаружения состояния сельскохозяйственной культуры перед режущим аппаратом и обеспечения в ответ на сигнал вывод управляющей информации в машину;
причем вывод управляющей информации в машину вызывает независимое регулирование установочных рычагов мотовила для независимого подъема и опускания одной из секций относительно по меньшей мере одной другой секции, чтобы по-разному размещать полеглые участки сельскохозяйственной культуры на жатке.
5. Устройство для уборки сельскохозяйственной культуры, содержащее:
уборочное транспортное средство, установленное на ходовых колесах для перемещения по грунту, поддерживающему сельскохозяйственную культуру на корню, для уборки;
жатку, содержащую режущий аппарат для срезания сельскохозяйственной культуры на корню;
полотенную систему транспортировки сельскохозяйственной культуры для транспортировки сельскохозяйственной культуры на корню внутрь от концов жатки к сборному участку уборочного транспортного средства, включающую два боковых полотенных транспортера и центральный подающий полотенный транспортер, перемещающийся назад;
и мотовило, установленное над режущим аппаратом с возможностью вращения вокруг оси, параллельной режущему аппарату, для перемещения сельскохозяйственной культуры над режущим аппаратом к устройству транспортировки;
установочный узел для поддержания жатки на уборочном транспортном средстве;
средство обнаружения для обнаружения или прогнозирования затора в перемещении сельскохозяйственной культуры в уборочную машину и выдачи выходного сигнала, указывающего на него, причем средство обнаружения использует ряд изображений сельскохозяйственной культуры на одном из боковых полотенных транспортерах или центральном подающем полотенном транспортере для обнаружения или прогнозирования возникновения затора;
и систему управления, выполненную с возможностью замедления или прекращения работы двух боковых полотенных транспортеров в ответ на выходной сигнал.
6. Устройство по п. 5, в котором средство обнаружения следит за перемещением сельскохозяйственной культуры на подающем полотенном транспортере.
7. Устройство по п. 5 или 6, в котором средство обнаружения следит за перемещением сельскохозяйственной культуры на заднем конце подающего полотенного транспортера.
8. Устройство по любому из пп. 5-7, в котором над задним концом подающего полотенного транспортера предусмотрен подающий валик, при этом средство обнаружения следит за перемещением сельскохозяйственной культуры прямо перед подающим валиком для обнаружения изменений в скорости на переходном участке перед входом в приемную камеру молотилки.
9. Устройство по любому из пп. 5-8, в котором транспортное средство содержит трактор с лафетной жаткой.
10. Устройство по любому из пп. 5-9, в котором автономно обнаруживаемое или прогнозируемое условие представляет собой нарушение в потоке сельскохозяйственной культуры жатки позади режущего аппарата.
11. Устройство по любому из пп. 5-10, в котором автономно обнаруживаемое или прогнозируемое условие представляет собой высоту сельскохозяйственной культуры перед режущим аппаратом.
12. Устройство по любому из пп. 5-11, в котором автономно обнаруживаемое или прогнозируемое условие представляет собой высоту сельскохозяйственной культуры, которая обнаруживается посредством ультразвукового датчика высоты.
13. Устройство по любому из пп. 5-12, в котором обнаружение осуществляется посредством анализа ряда последовательных изображений для определения изменений в них, причем изображения получаются посредством камеры, радара или лидара.
14. Устройство по любому из пп. 5-13, в котором обнаружение включает таблицу соответствия условий.
15. Устройство по любому из пп. 5-14, в котором вывод управляющей информации в машину вызывает перемещение мотовила вперед или назад.
16. Устройство по любому из пп. 5-15, в котором вывод управляющей информации в машину вызывает изменения в угле пальцев мотовила.
17. Устройство по любому из пп. 5-16, в котором вывод управляющей информации содержит дисплей для оператора, предупреждающий об обнаруженном условии.
18. Устройство по любому из пп. 5-17, в котором вывод управляющей информации предусматривает воздействие для прекращения перемещения вперед машины.
19. Устройство по любому из пп. 5-18, в котором обнаружение полегания сельскохозяйственной культуры по меньшей мере частично осуществляется посредством анализа отклонения углов стеблей от вертикали.
20. Устройство по любому из пп. 5-19, в котором обнаружение полегания сельскохозяйственной культуры по меньшей мере частично осуществляется посредством анализа отклонения углов стеблей от вертикали, получаемого посредством анализа изображений.
21. Устройство по любому из пп. 5-20, в котором обнаружение полегания сельскохозяйственной культуры осуществляется посредством комбинации анализа отклонения углов стеблей от вертикали и обнаружения верхней части сельскохозяйственной культуры перед режущим аппаратом.
22. Устройство по любому из пп. 5-21, в котором выходной сигнал зависит от категоризации степени полегания.
23. Устройство по любому из пп. 5-22, включающее проведение различия между короткой сельскохозяйственной культурой и сельскохозяйственной культурой, имеющей малую высоту вследствие полегания.
24. Устройство по любому из пп. 5-23, в котором автономно обнаруживаемое или прогнозируемое условие представляет собой наличие полоски несрезанной или плохо срезанной сельскохозяйственной культуры позади режущего аппарата, которая обнаруживается посредством мониторинга высоты сельскохозяйственной культуры.
25. Устройство по любому из пп. 5-24, в котором автономно обнаруживаемое условие представляет собой полосу взрыхленной почвы позади режущего аппарата.
26. Устройство по п. 25, в котором обнаружение полосы взрыхленной почвы позади режущего аппарата осуществляется посредством разности по цвету между полосой и грунтом.
27. Устройство по любому из пп. 5-26, в котором вывод управляющей информации в машину вызывает прекращение хода относительно грунта и подъем режущего аппарата для очистки затора режущего аппарата от почвы и/или срезанной массы.
| СОРБЕНТ НА ОСНОВЕ СОЕДИНЕНИЙ АЛЮМИНИЯ | 1998 |
|
RU2143316C1 |
| US 6185990 B2, 13.02.2001 | |||
| US 2011270494 A1, 03.11.2011 | |||
| WO 2014093814 A1, 19.06.2014 | |||
| US 8291684 B2, 23.10.2012 | |||
| US 2015216123 A1, 06.08.2015 | |||
| РЕЖУЩИЙ АППАРАТ | 2013 |
|
RU2631685C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2009 |
|
RU2402896C1 |

