Область техники, к которой относится изобретение
Настоящее изобретение относится к сельскохозяйственным уборочным машинам и, более конкретно, к сельскохозяйственным уборочным машинам, содержащим полотенную платформенную жатку.
Уровень техники
Сельскохозяйственная уборочная машина, такая как валкоукладчик или комбайн, представляет собой большую машину, используемую для уборки различных культур с поля. В случае комбайна во время операции уборки жатка, расположенная спереди комбайна, срезает созревшую культуру с поля. В случае тонкостебельчатых культур, таких как соя, пшеница и так далее, которые могут быть срезаны режущим аппаратом с множеством ножей, жатка может быть также известна, как платформенная жатка. Приемная камера молотилки, поддерживающая жатку, передает материал культуры в комбайн. Обмолачивающие и отделительные узлы в комбайне извлекают зерно из материала культуры и передают очищенное зерно в бункер для зерна для временного хранения. Материал культуры, не являющийся зерном, выходит сзади комбайна. Разгрузочный шнек передает чистое зерно из бункера для зерна в грузовик или тележку для зерна для транспортировки или в другой приемный бункер для хранения.
В случае валкоукладчика во время уборки жатка, расположенная спереди валкоукладчика, срезает созревшую культуру с поля. Культура передается к задней части жатки, и формирующие щиты образуют валок культуры между шинами транспортного средства для естественного высушивания культуры. При последующих полевых работах валки собираются для дальнейшей обработки, такой как отделение и очистка в случае зерновых культур или выкачивание воды или нарезка в случае сена.
Платформенная жатка, в общем, может быть двух типов. Один тип обычно имеет настил из металлического листа с двойным подающим шнеком, расположенным рядом с задней частью платформенной жатки для поперечной подачи материала культуры в приемную камеру молотилки. Платформенная жатка такого типа с подачей шнеком является более общеизвестной.
Другой тип платформенной жатки, также известный как полотенная жатка, использует плоскую широкую ленту, называемую транспортер или полотенный транспортер, для передачи материала культуры. Конструкция и количество лент являются разными для разных жаток. Один вид платформенной жатки, используемый в комбайне, имеет две боковых ленты, которые поперечно передают материал культуры к центру жатки, где центральная подающая лента перемещает материал культуры продольно в приемную камеру молотилки. Каждая лента обернута вокруг двух роликов, один из которых является приводным роликом, а второй является направляющим роликом. Пример такой конструкции полотенного транспортера описан в патенте США 6,202,397, который переуступлен правопреемнику настоящего изобретения.
Преимуществом полотенной жатки является то, что может быть передано большее количество материала культуры без закупоривания и так далее. Например, с широкими жатками, приближающимися к 12,19 м (40 футам) или даже больше, количество материала культуры, передающегося к приемной камере молотилки, может быть существенным. В жатке с подачей шнеком материал культуры может застревать между шнеком и задней стенкой жатки. В отличие от этого с полотенной жаткой материал культуры переносится на верхней части ленты с меньшим шансом застревания.
С более широкими полотенными жатками, от 7,62 м (25') до 12,19 м (40'), как описано выше, предусмотрены управляющие устройства, позволяющие оператору точно регулировать скорости полотенных транспортеров, мотовила и режущего аппарата, в зависимости от конкретной культуры и условий работы.
Обычно, при валковании поля оператор будет использовать один из двух способов. Один способ заключается в осуществлении нескольких проходов вокруг поля и последующем срезании вперед и назад с укладыванием валков параллельно друг другу. Второй способ заключается в срезании вокруг поля в одном направлении, работая снаружи вовнутрь. Как правило, углы делаются квадратными посредством вырезания, подъема жатки (исключения ее протаскивания через пересекающийся валок), разворота и опускания жатки перед вхождением в культуру.
Когда ряд закончен и жатка поднимается из культуры, лентам требуется определенный период времени для выгрузки культуры в валок. Оператор, как правило, поднимает жатку и уменьшает путевую скорость для того, чтобы убедиться в том, что валки не зайдут друг на друга. Если оператор не сделает паузу и позволит полотенным лентам осуществлять выгрузку перед пересечением другого валка, валки зайдут друг на друга, и их будет трудно подбирать комбайном.
В области техники существует необходимость в полотенной платформенной жатке, которая может работать в условиях конца ряда так, что культура не пересекает валки.
Раскрытие изобретения
В одном варианте изобретение относится к сельскохозяйственной уборочной машине, содержащей основную единицу и жатку, соединенную с основной единицей. Жатка содержит раму, по меньшей мере, один полотенный транспортер, детектор подъема жатки, выдающий выходной сигнал, указывающий состояние подъема жатки, и ускоритель полотенного транспортера, принимающий выходной сигнал от детектора подъема жатки и ускоряющий каждый из полотенных транспортеров при получении выходного сигнала.
В другом варианте изобретение относится к способу работы платформенной жатки для использования с сельскохозяйственной уборочной машиной. Способ включает этапы, на которых: приводят в действие, по меньшей мере, один полотенный транспортер с выбранной первой рабочей скоростью во время нормальной уборки; определяют состояние подъема платформенной жатки и приводят в действие, по меньшей мере, один полотенный транспортер со второй рабочей скоростью при определении состояния подъема. Вторая рабочая скорость больше первой рабочей скорости.
Краткое описание чертежей
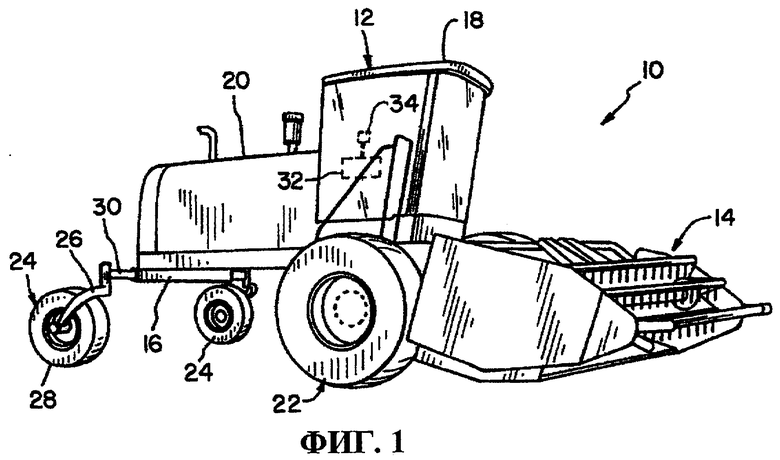
Фиг.1 представляет собой вид в перспективе варианта осуществления валкоукладчика согласно настоящему изобретению; и
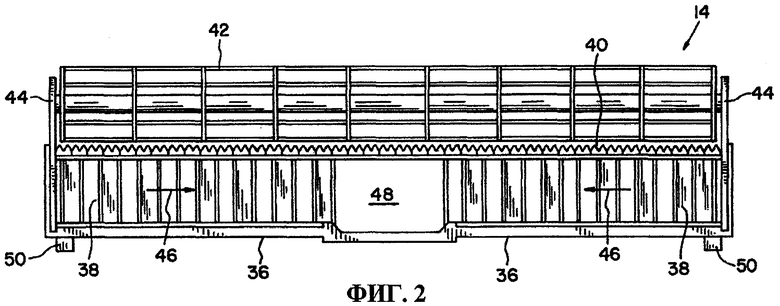
Фиг.2 представляет собой вид сверху полотенной платформенной жатки, показанной на валкоукладчике, показанном на фиг.1.
Подробное описание изобретения
Со ссылкой на чертежи, а более конкретно на фиг.1 и 2, показана рабочая машина в виде валкоукладчика 10 согласно настоящему изобретению. Валкоукладчик 10 в общем содержит тяговую единицу 12, несущую полотенную платформенную жатку 14. Далее полотенная платформенная жатка 14 также может называться «жаткой».
Тяговая единица 12 содержит раму 16, несущую такие обычные элементы, как кабина 18 оператора, отсек 20 двигателя, вмещающий двигатель внутреннего сгорания (не показан), пара приводных колес 22 и пара задних узлов 24 самоустанавливающегося колеса. Приводные колеса 22 обычно находятся спереди тяговой единицы 12, а узлы 24 самоустанавливающегося колеса обычно находятся сзади тяговой единицы 12. Приводные колеса 22 соединены посредством соответствующих приводных двигателей с двухконтурной гидростатической трансмиссией (не показана). Также возможно приводить приводные колеса 22 посредством другого типа регулируемой трансмиссии, такой как гидромеханическая или электромеханическая трансмиссия.
Каждый узел 24 самоустанавливающегося колеса содержит колесный рычаг 26 и самоустанавливающееся колесо 28. Колесный рычаг 26 шарнирно соединен у верхнего конца с рамой 16 машины, в частности у наружного конца задней оси 30, образующей часть рамы 16 машины. Колесный рычаг 26 показан в виде одного рычага, который изгибается к стороне колеса 28, но также может быть выполнен в виде вилки с наружными концами на противоположных сторонах колеса 28.
Электрическая схема 32 обработки сигналов, обычно установленная внутри кабины 18 оператора справа или сзади от оператора, выполнена в виде одного или более контроллеров. В показанном варианте осуществления контроллер 32 может содержать множество контроллеров (не показаны). Например, контроллер 32 может включать в себя блок управления двигателем, который осуществляет электронное управление работой двигателя внутреннего сгорания внутри двигательного отсека 20 и соединен с множеством датчиков, связанных с работой двигателя внутреннего сгорания. Кроме того, блок управления двигателем может получать выходные сигналы от блока управления транспортным средством, отображающего параметры управления транспортным средством, вводимые оператором, такие как заданная путевая скорость (определяемая положением педали акселератора и/или гидростатики) или заданное направление валкоукладчика 10 (определяемое выходным сигналом от датчика поворота, выражающим угловую ориентацию рулевого колеса или положение ручки (ручек) управления). Кроме того, контроллер 32 может содержать блок управления трансмиссией, который осуществляет электронное управление работой трансмиссии и соединен с множеством датчиков, связанных с работой передачи. Узел управления двигателем, узел управления транспортным средством и узел управления передачей могут быть физически отделены друг от друга и соединены вместе через шинную структуру, обеспечивающую двухсторонний поток информации, такую как шина сети локальных контроллеров. Такие схемы контроллеров известны и, следовательно, не показаны конкретно на чертежах и не описаны подробно здесь.
Детектор подъема жатки в виде устройства ввода оператора, в частности в виде нажимного переключателя 34, соединен с контроллером 32. Переключатель 34 нажимается оператором для подъема платформенной жатки 14 и выдает выходной сигнал контроллеру 32. В качестве альтернативы, устройством ввода оператора может быть сенсорный экран и так далее.
Более того, предпочтительно вместо использования переключателя, приводимого в действие оператором, для переведения полотенной платформенной жатки 14 в состояние подъема, также использовать другие типы детекторов подъема жатки. Например, детектор подъема жатки может быть выполнен в виде датчика положения, связанного с цилиндром (цилиндрами) для подъема полотенной платформенной жатки 14 относительно тяговой единицы 12. Датчик положения может выдавать выходной сигнал контроллеру 32, когда платформенная жатка находится на заданной высоте, обозначая, что платформенная жатка 14 находится в состоянии подъема. В качестве альтернативы, детектор подъема жатки может быть выполнен в виде глобальной системы позиционирования (GPS), которая распознает, когда валкоукладчик 10 находится в положении конца ряда, и передает выходной сигнал контроллеру 32.
Полотенная платформенная жатка 14 обычно съемно установлена у переднего конца тяговой единицы 12 под кабиной 18 оператора посредством подъемного узла в виде двух подъемных рычагов (не показаны). Полотенная платформенная жатка 14, в общем, содержит раму 36, два поперечных боковых полотенных транспортера 38, узел 40 режущего аппарата, мотовило 42 и два рычага 44 подъема мотовила.
Полотенная платформенная жатка 14 в показанном варианте осуществления изображена в виде жесткой полотенной жатки, но также может быть выполнена в виде гибкой. Кроме того, показанная полотенная платформенная жатка 14 не включает в себя центральный продольный полотенный транспортер между боковыми полотенными транспортерами 38, но может быть выполнена с постоянным или съемным центральным полотенным транспортером. Когда центральный полотенный транспортер находится в установленном положении, полотенная платформенная жатка 14 может быть использована как уборочная машина, а когда он находится в снятом положении, полотенная платформенная жатка 14 может быть использована как валковая жатка или валкоукладчик. Кроме того, показанная полотенная платформенная жатка 14 предназначена для использования с валкоукладчиком 10, но может быть выполнена с возможностью использования для других применений, таких как использование с тяговой единицей в виде комбайна. Также возможны другие конфигурации, не выходящие за рамки объема настоящего изобретения.
Рычаги 44 подъема мотовила шарнирно соединены у одного их конца с противоположными наружными концами рамы 36. Также на противоположных концах рычагов 44 подъема мотовила с возможностью вращения установлено мотовило 42. Каждый рычаг 44 подъема мотовила может быть избирательно перемещен вверх и вниз посредством контроллера 32 с использованием гидравлического цилиндра, и обычно два гидравлических цилиндра соединены параллельно, так что они перемещаются вместе при приведении в действие.
В показанном варианте осуществления узлом 40 режущего аппарата является косилка с пальцево-ножевым режущим аппаратом. Узел 40 режущего аппарата приводится подходящим механическим приводом у одного конца полотенной платформенной жатки 14. В качестве альтернативы, узлом 40 режущего аппарата может быть раздельный режущий аппарат с общим приводом или отдельными приводами для каждого режущего аппарата.
Полотенные транспортеры 38 перемещаются в направлении поперечно вовнутрь, как обозначено стрелками 46, и размещают материал срезанной культуры в открытой области 48 между полотенными транспортерами 38, образуя валок материала срезанной культуры. Каждый полотенный транспортер 38 приводится в действие отдельно соответствующим приводным двигателем 50, который соединен с соответствующим концом ролика (не показан), несущего соответствующий полотенный транспортер 38. В показанном варианте осуществления предполагается, что каждый приводной двигатель 50 является гидравлическим двигателем под согласованным управлением контроллера 32.
Согласно особенности настоящего изобретения полотенные транспортеры 38 приводятся в действие с возможностью управления для ускорения до большей рабочей скорости, когда полотенная платформенная жатка 14 находится в состоянии подъема. «Состояние подъема» может соответствовать переключателю, приведенному в действие оператором, высоте подъема полотенной платформенной жатки 14 или абсолютному положению валкоукладчика 10 в поле. Например, как указано выше, оператор может нажать переключатель 34, когда платформенная жатка 14 находится в конце ряда. В качестве альтернативы, датчик положения может определить поднятое положение полотенной платформенной жатки 14, когда валковая жатка поднята вручную в конце ряда. В качестве другого примера, глобальная система позиционирования может выдавать сигнал о том, что валкоукладчик 10 переместился в конец рядов поля, предполагая, что платформенная жатка была поднята автоматически или вручную у кромки концевых рядов.
При определении «состояния подъема» полотенной платформенной жатки 14 контроллер 32 управляет приводными двигателями 50 для ускорения боковых полотенных транспортеров 38 до большей рабочей скорости и выгрузки материала срезанной культуры в открытую область 48 перед тем, как валкоукладчик 10 пересечет другие концевые ряды в конце поля. Приводные двигатели 50 и контроллер 32 вместе выполняют роль ускорителя полотенного транспортера для ускорения полотенных транспортеров 38 до скорости, которая является большей, чем нормальная рабочая скорость. Полотенные транспортеры 38, предпочтительно, одновременно управляются с использованием контроллера 32, то также могут управляться отдельно и независимо. Следовательно, полотенные транспортеры могут продолжать работать на большей скорости в течение заданного периода времени или до тех пор, пока полотенная платформенная жатка 14 не вернется на рабочую высоту или почти на рабочую высоту, когда оператор снова нажмет переключатель 34, или датчик подъемного цилиндра определит, что платформенная жатка находится на рабочей высоте или почти на рабочей высоте.
В варианте осуществления, показном на фиг.1 и 2, полотенные транспортеры 38 ускоряются на валкоукладчике. Тем не менее, также возможно то, что эта же идея изобретения может быть использована на других типах рабочих машин с полотенными ремнями. Например, можно управлять комбайном с полотенной платформенной жаткой так, что полотенные транспортеры ускоряются до большей рабочей скорости в зависимости от состояния подъема платформенной жатки и/или положения комбайна в поле. Следует понимать, что если рабочая скорость полотенных транспортеров увеличивается на комбайне, может быть желательным увеличение рабочих скоростей других компонентов, таких как скорость цилиндра, и так далее.
Более того, в варианте осуществления, показанном на фиг.1 и 2, полотенные транспортеры ускоряются при наличии состояния жатки в форме состояния подъема жатки, определяемого или предполагаемого различными способами, как описано выше. Тем не менее, возможно то, что полотенные транспортеры могут быть ускорены при вводе оператора или определении какого-либо другого состояния, отличного от состояния подъема, связанного с полотенной платформенной жаткой 14. Например, может быть возможным то, что состояние жатки может соответствовать автоматическому определению нагрузки культуры на полотенную платформенную жатку 14, как может случиться при определенных условиях закупоривания, и так далее.
После описания предпочтительного варианта осуществления становится понятно, что могут быть выполнены различные изменения, не выходящие за рамки объема изобретения, определенного в приложенной формуле изобретения.
Группа изобретений относится к сельскому хозяйству и может быть использована при уборке различных культур с поля. Сельскохозяйственная уборочная машина содержит соединенную с тяговой единицей жатку, включающую раму, по меньшей мере один полотенный транспортер, детектор подъема жатки и ускоритель полотенного транспортера. Детектор подъема жатки выполнен с возможностью выдачи выходного сигнала, указывающего состояние подъема жатки. Ускоритель полотенного транспортера выполнен с возможностью приема выходного сигнала от детектора подъема жатки и ускорения каждого из по меньшей мере одного полотенного транспортера при получении выходного сигнала. Использование группы изобретений обеспечивает укладку валков без захода их друг на друга в конце поля. 2 н. и 12 з.п. ф-лы, 2 ил.
1. Сельскохозяйственная уборочная машина, содержащая:
тяговую единицу;
жатку, соединенную с тяговой единицей и содержащую:
раму;
по меньшей мере один полотенный транспортер;
детектор подъема жатки, выполненный с возможностью выдачи выходного сигнала, указывающего состояние подъема жатки; и
ускоритель полотенного транспортера, выполненный с возможностью приема выходного сигнала от детектора подъема жатки и ускорения каждого из по меньшей мере одного полотенного транспортера при получении выходного сигнала.
2. Машина по п.1, в которой детектор подъема жатки представляет собой датчик положения, устройство ввода оператором или глобальную систему позиционирования.
3. Машина по п.2, в которой устройство ввода оператором представляет собой нажимной переключатель.
4. Машина по п.1, в которой ускоритель полотенного транспортера содержит электронный контроллер.
5. Машина по п.1, в которой ускоритель полотенного транспортера получает выходной сигнал и ускоряет каждый из по меньшей мере одного полотенного транспортера в течение заданного периода времени.
6. Машина по п.1, в которой ускоритель полотенного транспортера получает выходной сигнал и ускоряет каждый из по меньшей мере одного полотенного транспортера до тех пор, пока жатка не опустится в рабочее положение.
7. Машина по п.1, в которой по меньшей мере один полотенный транспортер содержит два поперечных боковых полотенных транспортера.
8. Способ работы сельскохозяйственной уборочной машины по п.1, включающий этапы, на которых:
приводят в действие по меньшей мере один полотенный транспортер с выбранной первой рабочей скоростью во время нормальной уборки;
определяют состояние подъема жатки; и
приводят в действие по меньшей мере один полотенный транспортер со второй рабочей скоростью при определении состояния подъема, причем вторая рабочая скорость больше первой рабочей скорости.
9. Способ по п.8, в котором состояние подъема имеет место при условии конца ряда.
10. Способ по п.8, в котором ускоренная вторая рабочая скорость имеет место в течение заданного периода времени.
11. Способ по п.8, в которой ускоритель полотенного транспортера получает выходной сигнал и ускоряет каждый из по меньшей мере одного полотенного транспортера до тех пор, пока жатка не опустится в рабочее положение.
12. Способ по п.8, в котором первую рабочую скорость и вторую рабочую скорость обеспечивают с использованием электронного контроллера.
13. Способ по п.8, в котором этап определения состояние подъема выполняют с использованием датчика положения, устройства ввода оператором или глобальной системы позиционирования.
14. Способ по п.13, в котором устройство ввода оператором представляет собой нажимной переключатель.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 7392124 B2, 24.06.2008 | |||
| EP 1867228 A1, 19.02.2007 | |||
| RU 2053627 C1, 10.02.1996 | |||
| Жатка зерноуборочного комбайна | 1988 |
|
SU1828389A3 |

