Область техники, к которой относится изобретение
Настоящее изобретение относится к сельскохозяйственным уборочным машинам, таким как комбайны, и более конкретно, к сельскохозяйственным уборочным машинам, включающим в себя платформенную жатку с ленточным транспортером.
Уровень техники
Сельскохозяйственная уборочная машина, такая как комбайн, включает в себя хедер и приемную камеру молотилки, которая удаляет материал сельскохозяйственной культуры из области сбора материала сельскохозяйственной культуры и передает материал сельскохозяйственной культуры к молотилке. В случае более тонких сельскохозяйственных культур со стеблями, таких как соя, пшеница и т.д., которые можно срезать режущим аппаратом, несущим множество ножей, хедер также может быть известен как платформенная жатка. Молотилка удаляет материал зерновой культуры из материала незерновой культуры. Зерно очищается и складывается в зерновой бункер. Когда зерновой бункер заполняется, разгрузочный шнек, который расположен рядом с комбайном во время сбора сельскохозяйственной культуры, перемещают в разгрузочное положение, в котором шнек проходит приблизительно перпендикулярно продольной оси комбайна. Комбайн движется рядом с транспортным средством, в которое зерно разгружают, такое как полуприцеп, и разгрузочный шнек приводят в действие для разгрузки зерна в транспортное средство.
Платформенная жатка, в общем, может быть двух типов. Один тип обычно имеет настил из листового металла с двойным питающим шнеком около хвостовой части платформенной жатки для подачи материала сельскохозяйственной культуры в продольном направлении в приемную камеру молотилки. Платформенная жатка этого типа со шнековым питателем является более обычной.
Другой тип платформенной жатки, также известный как жатка полотняного транспортера, использует плоский, широкий ремень, называемый полотняным транспортером или ремнем полотняного транспортера, чтобы транспортировать материал сельскохозяйственной культуры. Расположение и количество ремней изменяется между жатками. Один тип жатки полотняного транспортера имеет два боковых ремня, которые транспортируют материал сельскохозяйственной культуры в продольном направлении, к центру жатки, где центральный подающий ремень перемещает материал сельскохозяйственной культуры в боковом направлении в приемную камеру молотилки. Каждый ремень обмотан вокруг пары роликов, один из которых является ведущим роликом, а другой является поддерживающим роликом. Мотовило простирается по всей ширине жатки, перемещая материал сельскохозяйственной культуры от режущего аппарата на ремень полотняного транспортера. Пример этого типа устройства полотняного транспортера раскрыт в патенте США № 6,202,397, переуступленном патентообладателю настоящего изобретения.
Преимущество жатки полотняного транспортера заключается в том, что большее количество материала сельскохозяйственной культуры можно транспортировать без засорения и т.д. Например, с широкими жатками, достигающими 40 футов или еще больше, количество материала сельскохозяйственной культуры, транспортируемого к приемной камере молотилки, может быть значительным. С жаткой шнекового питателя, материал сельскохозяйственной культуры может зажиматься между шнеком и задней стенкой жатки. Напротив, с жаткой полотняного транспортера, материал сельскохозяйственной культуры переносится на верхнюю часть ремня с меньшей возможностью засорения.
Используемые в настоящее время жатки полотняного транспортера имеют жесткий каркас, не позволяющий конструкции каркаса во время использования сгибаться до какой-либо заметной степени. Жатку полотняного транспортера можно помещать в "плавающее" положение так, что режущий аппарат на ведущей кромке не зарывается в землю, но ведущая кромка самой жатки не может сгибаться по ширине жатки из-за неровного грунта земли. Это приводит к пропусканию некоторого материала сельскохозяйственной культуры в углублениях земли и т.д., а также может вызывать зарывание части режущего аппарата в локализованных возвышениях земли (например, маленькие насыпи и т.д.). Конечно, пропущенный материал сельскохозяйственной культуры непосредственно переходит в упущенный доход, а локализованная поверхностная резка почвы может вызывать дополнительные расходы на ремонт, возникающий в результате сломанных ножей, щитков для ножей и т.д.
Что необходимо в технике, так это жатка полотняного транспортера, которая способна сгибаться по ширине жатки на локализованном основании, без вмешательства в действие вращающегося мотовила над жаткой.
Сущность изобретения
Изобретение содержит, в одном своем варианте, сельскохозяйственную уборочную машину, включающую в себя приемную камеру молотилки и платформенную жатку, прикрепленную к приемной камере молотилки. Платформенная жатка включает в себя по меньшей мере одну секцию жатки, причем каждая секция жатки имеет каркас, узел режущего аппарата на ведущей кромке секции жатки и индикатор избыточного локализованного отклонения, связанный с узлом режущего аппарата. Предусмотрена одна или более пара опорных рычагов мотовил, причем каждая пара соединена с соответствующим мотовилом. Каждая пара опорных рычагов мотовил выполнена с возможностью поворота к узлу режущего аппарата и от него, в зависимости от состояния индикатора избыточного локализованного отклонения.
Изобретение содержит, в другом своем варианте, способ работы платформенной жатки в сельскохозяйственной уборочной машине, включающий в себя этапы: обнаружения избыточного локализованного отклонения узда режущего аппарата; и перемещения по меньшей мере одного мотовила от узла режущего аппарата, в зависимости от обнаруженного избыточного локализованного отклонения сборки режущего аппарата.
Краткое описание чертежей
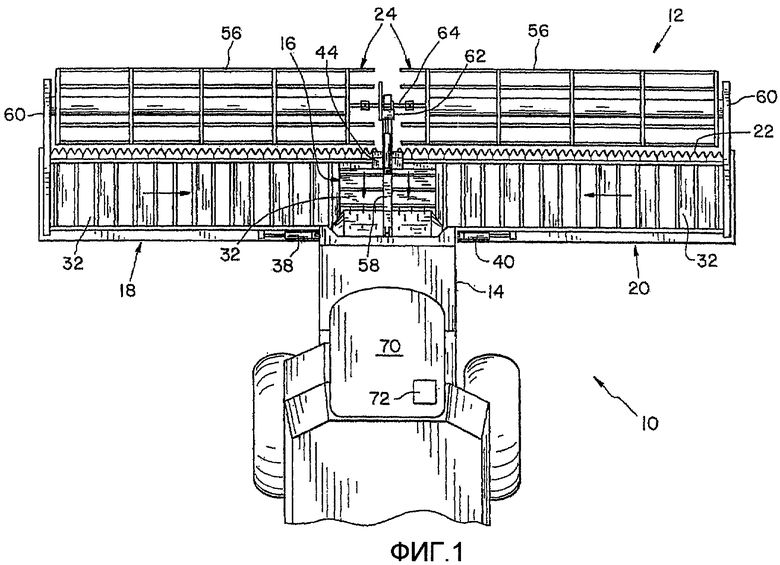
Фиг.1 представляет собой частичный вид сверху сельскохозяйственного комбайна, включающего в себя вариант осуществления жатки полотняного транспортера согласно настоящему изобретению;
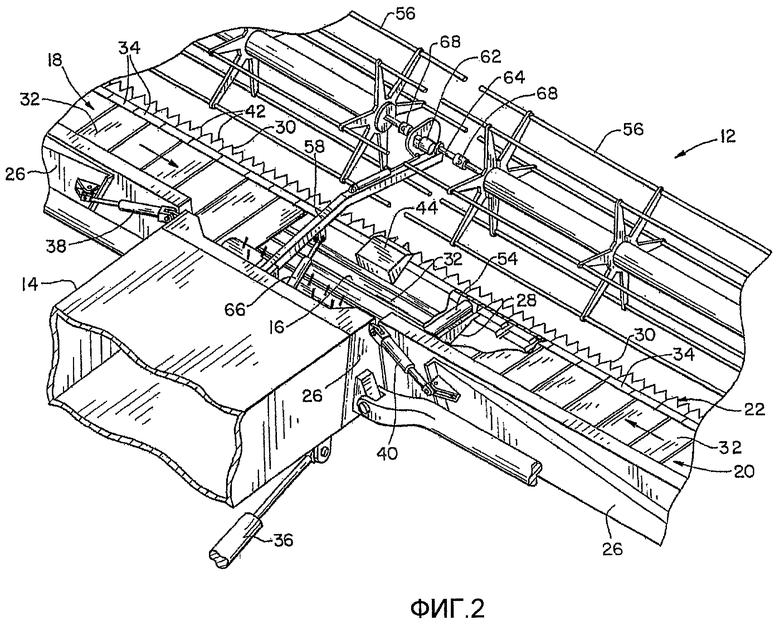
Фиг.2 представляет собой частичный вид в перспективе сельскохозяйственного комбайна, показанного на Фиг.1;
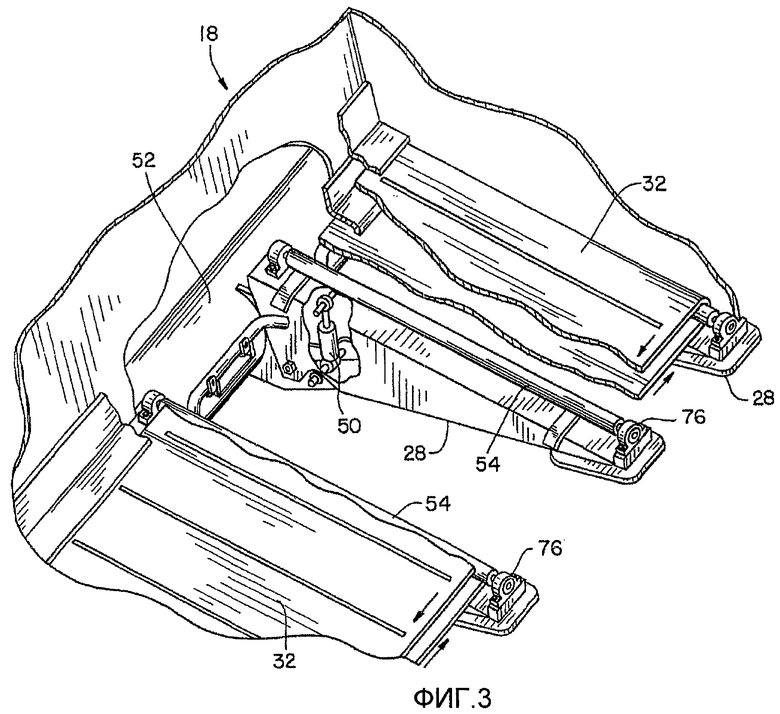
Фиг.3 представляет собой частичный вид в перспективе платформенной жатки, показанной на Фиг.1 и 2;
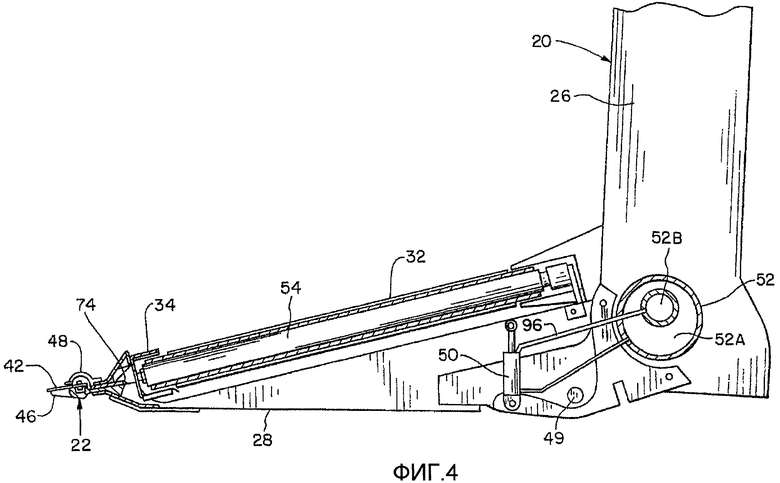
Фиг.4 представляет собой вид сбоку в разрезе через секцию жатки крыла, показанную на Фиг.1 и 2; и
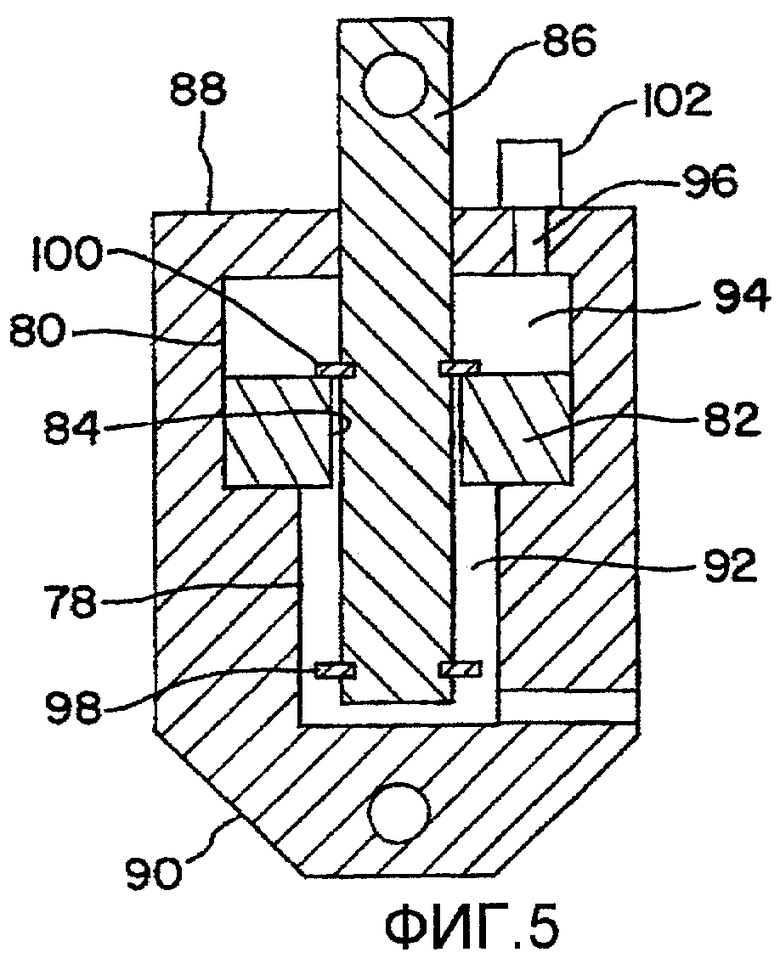
Фиг.5 представляет собой вид сбоку в разрезе через плавающий цилиндр, показанный на Фиг.3 и 4; и
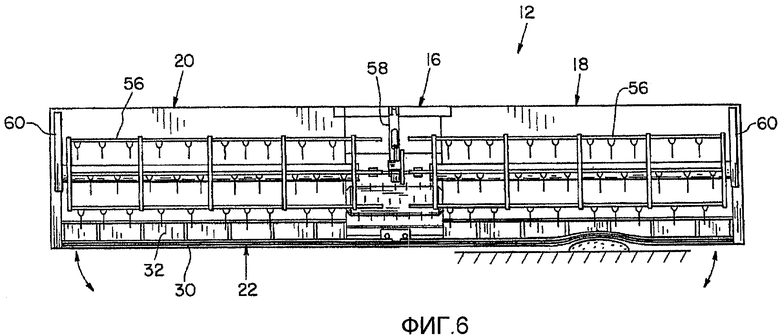
Фиг.6 представляет собой вид сверху платформенной жатки, показанной на Фиг.1, 2 и 4, при пересечении локализованного выступа земли.
Подробное описание изобретения
Со ссылкой на чертежи, а более конкретно, на Фиг.1 и 2, показана сельскохозяйственная уборочная машина в виде комбайна 10, включающего в себя вариант осуществления платформенной жатки 12 согласно настоящему изобретению. Комбайн 10 включает в себя приемную камеру 14 молотилки, которая соединена с платформенной жаткой 12 с возможностью отсоединения. Приемная камера 14 молотилки принимает материал сельскохозяйственной культуры от платформенной жатки 12, как зерновой, так и незерновой материал сельскохозяйственной культуры, и передает материал сельскохозяйственной культуры к молотилке в комбайне 10 известным способом (не показан). Зерновой материал сельскохозяйственной культуры отделяется от незернового материала сельскохозяйственной культуры, очищается и передается в зерновой бункер. Незерновой материал сельскохозяйственной культуры передают к измельчителю, пневмопогрузчику и т.д. известным способом и разбрасывают назад на поле.
Платформенная жатка 12, в общем, включает в себя множество секций 16, 18 и 20 жатки, узел 22 режущего аппарата и узел 24 мотовил. В показанном варианте осуществления секция 16 жатки является центральной секцией жатки, секция 18 жатки является первой секцией жатки крыла, а секция 20 жатки является второй секцией жатки крыла. Хотя платформенная жатка 12 показана с тремя секциями жатки, ее можно образовывать с большим или меньшим количеством секций жатки, в зависимости от конкретного применения.
Каждая секция 16, 18 и 20 жатки, в общем, включает в себя каркас 26, множество плавающих рычагов 28, соединенных с соответствующим каркасом 26, режущий аппарат 30, опирающийся на наружные концы соответствующих плавающих рычагов 28, бесконечный ремень 32 и множество направляющих 34 ремня. Каркас 26 каждой из первой секции 18 жатки крыла и второй секции 20 жатки крыла шарнирно соединен с центральной секцией 16 жатки так, что наружные концы первой секции 18 жатки крыла и второй секции 20 жатки крыла можно перемещать вверх и вниз, независимо от центральной секции 16 жатки. С этой целью подъемный цилиндр 36, подсоединенный между каркасом комбайна 10 и приемной камерой 14 молотилки, поднимает всю платформенную жатку 12, первый наклонный цилиндр 38, подсоединенный шарнирно между соответствующим каркасом 26 первой секции 18 жатки крыла и центральной секцией 16 жатки, перемещает первую секцию 18 жатки крыла относительно центральной секции 16 жатки, а второй наклонный цилиндр 40, подсоединенный шарнирно между соответствующим каркасом 26 второй секции 20 жатки крыла и центральной секцией 16 жатки, перемещает вторую секцию 20 жатки крыла относительно центральной секции 16 жатки.
Узел 22 режущего аппарата включает в себя два режущих аппарата 30, опирающихся на наружные концы плавающих рычагов 28 (то есть на ведущие кромки секции 16, 18 или 20 жатки). Каждый режущий аппарат 30 включает в себя множество ножей 42, опирающихся на режущий аппарат (специально на показан). Конкретный тип ножа можно изменять, например, это может быть нож с двойным лезвием (как показано) или нож с одним лезвием. Режущий аппарат выполняют из металла, который является гибким до степени, обеспечивающей возможность требуемой степени сгибания по ширине платформенной жатки 12. В показанном варианте осуществления большая часть каждого режущего аппарата 30 опирается на соответствующую первую секцию 18 жатки крыла или вторую секцию 20 жатки крыла, с меньшей степенью на соседние внутренние концы каждого режущего аппарата 30, опирающиеся на центральную секцию 16 жатки. Режущие аппараты 30 одновременно приводятся одним приводом 44 ножа, обеспечивая возвратно-поступательное движение в параллельных противоположных направлениях между режущими аппаратами 30. Также можно взаимно приводить режущие аппараты 30 возвратно-поступательным способом с помощью множества приводов ножей, которые можно располагать на соседних внутренних концах или наружных концах режущих аппаратов 30.
Множество направляющих 46 ножей расположены напротив ножей 42 для того, чтобы обеспечивать противоположные поверхности для резания материала сельскохозяйственной культуры ножами 42. Множество держателей 48, расположенных вдоль режущих аппаратов 30, имеют дальний конец над режущими аппаратами 30 для того, чтобы поддерживать режущие аппараты 30 на месте во время возвратно-поступательного движения.
Плавающие рычаги 28 могут поворачиваться в их местах соединения с соответствующим каркасом 26. Плавающий цилиндр 50, подсоединенный между соответствующим каркасом 26 и плавающим рычагом 28, можно использовать для того, чтобы поднимать или опускать наружный конец плавающего рычага (плавающих рычагов) 28 на ведущей кромке платформенной жатки 12. Каждый плавающий цилиндр 50 также можно помещать в "плавающее" положение, обеспечивая возможность соединительному плавающему рычагу 28, в общем, следовать за контуром земли во время работы. Более конкретно, каждый плавающий цилиндр 50 связан по текучей среде с накопителем 52, опирающимся на секцию 16, 18 или 20 жатки. Накопитель 52 обеспечивает возможность протекания жидкости к прикрепленным плавающим цилиндрам 50 и от них так, что не возникает никакого возрастания давления. При этом силовые цилиндры, связанные с каждым плавающим цилиндром 50, свободны для перемещения назад и вперед в продольном направлении, таким образом обеспечивая возможность плавающим рычагам 28 следовать за контуром земли. Когда они не находятся в плавающем режиме, плавающие цилиндры 50 можно приводить в действие так, чтобы перемещать плавающие рычаги 28 в направлении вверх или вниз. В показанном варианте осуществления каждый плавающий цилиндр 50 представляет собой гидравлический цилиндр, но его можно образовывать в виде баллона для сжатого газа для конкретного применения.
Каждый плавающий рычаг 28 также соединен с соответствующим роликом 54. Множество роликов 54 для каждой секции 16, 18 и 20 жатки служат носителями и расположены внутри петли соответствующего бесконечного ремня 32. На внутреннем конце первой секции 18 жатки крыла и второй секции 20 жатки крыла находится приводной ролик, а на наружном конце первой секции 18 жатки крыла и второй секции 20 жатки крыла находится поддерживающий ролик. Ролики, расположенные между внутренним приводным роликом и наружным поддерживающим роликом на каждом плавающем рычаге 28, также выполняют функцию поддерживающих роликов. Следует отметить, что количество плавающих рычагов 28, и таким образом, количество роликов 54, может изменяться в зависимости от полной ширины режущего хедера 12 в поперечном направлении относительно направления движения.
Узел 24 мотовил включает в себя два мотовила 56, центральный опорный рычаг 58 и пару внешних опорных рычагов 60 мотовил. Каждое мотовило 56 служит носителем множества зубцов для перемещения материала сельскохозяйственной культуры на секции 16, 18 и 20 жатки. Внешние опорные рычаги 60 мотовил шарнирно соединены на одном своем конце с наружным концом соответствующей первой секции 18 жатки крыла или второй секции 20 жатки крыла. Внешние опорные рычаги 60 мотовил поддерживают с возможностью вращения соответствующее мотовило 56 на его противоположном конце. Каждый внешний опорный рычаг 60 мотовила можно по выбору перемещать вверх и вниз, используя гидравлические цилиндры, а пара гидравлических цилиндров обычно соединена параллельно так, что они могут перемещаться вместе при приведении в действие.
Центральный опорный рычаг 58 мотовила шарнирно соединен на одном своем конце с центральной секцией 16 жатки над отверстием, проходящим к приемной камере 14 молотилки. Центральный опорный рычаг 58 мотовила поддерживает с возможностью вращения внутренний конец каждого мотовила 56 на его противоположном конце. Гидравлический двигатель 62 или другой подходящий механический привод путем вращения приводит в действие каждое мотовило 56. Более конкретно, гидравлический двигатель 62 приводит в действие общий ведущий вал 64 через цепь и цепное колесо или другое подходящее приспособление (не показано). Оператор может регулировать скорость вращения мотовил 56, регулируя скорость вращения гидравлического двигателя 62.
Центральный опорный рычаг 58 мотовила можно по выбору перемещать вверх и вниз, используя гидравлический цилиндр 66. Центральный опорный рычаг 58 мотовила выполнен с возможностью перемещения независимо от внешних опорных рычагов 60 мотовил. Для обеспечения этого независимого перемещения, ведущий вал 64, приводимый гидравлическим двигателем 62, соединен на каждом своем конце через универсальный шарнир 68 с соответствующим мотовилом 56. Это независимое перемещение центрального опорного рычага 58 мотовила можно достичь вручную, используя отдельный переключатель приведения в действие или плечо рычага в кабине 70 оператора, или автоматически, используя электронный контроллер 72, расположенный в кабине 70 или другом подходящем месте.
Каждая секция 16, 18 и 20 жатки имеет ведущую кромку, которая выполнена с возможностью обеспечения сгибания узла 22 режущего аппарата до существенной степени локализованным образом по ширине платформенной жатки 12. Со ссылкой на Фиг.3 и 4 каждый плавающий рычаг 28 имеет дальний конец, соседний с ведущей кромкой платформенной жатки 12. Каждый из плавающих рычагов 28, соединенных с каждой соответствующей секцией 16, 18 и 20 жатки, имеет дальний конец, который прикреплен к щитку 46 ножа, гибкой подложке 74, втулке 76 и удерживающему элементу 48. Гибкая подложка 74 для каждой конкретной секции 16, 18 и 20 жатки по существу образует основу, к которой прикреплены другие модульные элементы, и обеспечивает гибкость секции жатки по ее ширине. Корпус 76 втулки также прикреплен к гибкой подложке 74, поддерживающей втулку (не показана), которая поддерживает с возможностью вращения ролик 54. В показанном варианте осуществления гибкая подложка 74 представляет собой стальную пластину с различными монтажными отверстиями, выполненными в ней, и имеет модуль, эластичным образом обеспечивающий требуемую степень гибкости. Геометрическую конфигурацию и тип материала, из которого образуют гибкую подложку 74, можно изменять, в зависимости от применения.
В показанном варианте осуществления каждый плавающий рычаг 28 снабжен пассивным стопором, обеспечивающим возможность перемещения плавающего рычага в нормальное положение остановки во время нормальной работы, и за пределы нормального положения остановки к положению остановки при перегрузке во время состояния остановки при перегрузке. Такое состояние может происходить, например, когда узел 22 режущего аппарата смещается вверх локализованным образом от выступа или препятствия на земле, такого как камень, бревно, холм почвы и т.д. (см. Фиг.6). При отсутствии использования пассивного стопора, каждый плавающий рычаг 28 может достигать остановки с резким торможением в наивысшем положении перемещения, после которого дополнительное смещение выступом земли может перемещать вес всей платформенной жатки 12 и/или приемной камеры 14 молотилки на один плавающий рычаг 28. Это нежелательно, поскольку плавающие рычаги 28 должны быть предназначены для удержания такого веса, что, конечно, добавляется к основной массе, весу и стоимости платформенной жатки 12. С другой стороны, позволяя одному или больше плавающим рычагам 28 поворачиваться вверх за пределы нормального положения остановки во время чрезвычайных условий, предотвращают чрезмерное механическое напряжение на плавающем рычаге, которое, в свою очередь, позволяет делать размер каждого плавающего рычага 28 меньше.
Более конкретно, со ссылкой на Фиг.4 и 5 каждый плавающий цилиндр 50, соединенный с соответствующим плавающим рычагом 28, выполненным идентичным цилиндру с двумя рассверленными отверстиями, с первым рассверленным отверстием 78 и вторым отверстием 80 большего диаметра. Плавающий поршень 82 свободно плавает внутри второго рассверленного отверстия 80 и имеет внутреннее рассверленное отверстие 84 с внутренним диаметром, который только немного больше, чем внешний диаметр стержня 86. Плавающий поршень 82 выполнен с возможностью скользящего перемещения назад и вперед внутри второго рассверленного отверстия 80 рядом с дальним концом 88 плавающего цилиндра 28, от которого проходит стержень 86. Плавающий поршень 82 выполнен с возможностью перемещения к нормальному положению остановки, показанному на Фиг.5, примыкающему к первому рассверленному отверстию 78, и положению остановки при перегрузке, примыкающему к отдаленному от центра концу 88.
Область переменного объема внутри первого рассверленного отверстия 78 между плавающим поршнем 82 и ближним концом 90 образует камеру 92 для текучей среды, которая может либо находиться в "плавающем" состоянии, либо которая принимает текучую среду под высоким давлением из камеры 52A накопителя до проходящего стержня 86, чтобы поднимать соответствующий плавающий рычаг 28. Область переменного объема внутри второго рассверленного отверстия 80 между плавающим поршнем 82 и дальним концом 88 образует камеру 94 для текучей среды, которая находится в связи по текучей среде с камерой 52B накопителя через линию 96 для текучей среды. Давление внутри камеры 52B накопителя и камеры 94 для текучей среды устанавливают так, чтобы обеспечивать нормальное положение остановки для стержня 86. С этой целью, стержень 86 включает в себя первый фиксатор 98 и второй фиксатор 100, которые расположены на противоположных сторонах и входят в зацепление с плавающим поршнем 82. В показанном варианте осуществления каждый из первого фиксатора 98 и второго фиксатора 100 выполнены в виде пружинных стопорных колец, но их можно выполнять по-другому, в зависимости от применения. При нормальных рабочих режимах, первый фиксатор 98 входит в зацепление с нижней частью плавающего поршня 82, который ограничивает длину хода стержня 86 от дальнего конца 88. Однако, в случае локализованного экстремального отклонения вверх узла 22 режущего аппарата, и в свою очередь, наружного конца плавающего рычага 28, давление, прикладываемое первым фиксатором 98 к плавающему поршню 82, превышает заданное давление внутри второго рассверленного отверстия 80, таким образом обеспечивая возможность перемещения плавающего поршня 82 и дополнительного перемещения стержня 86. Перемещение плавающего поршня 82 из нормального положения остановки обеспечивает индикатор избыточного локализованного отклонения узла 22 режущего аппарата. Текучая среда, которая удаляется из камеры 94 для текучей среды, разгружается в камеру 52B накопителя по существу под постоянным давлением. Максимальное положение остановки при перегрузке происходит в точке, в которой второй фиксатор 100 плавающего поршня 82 оказывается непосредственно рядом с дальним концом 88.
В показанном варианте осуществления накопитель 52 показан, как включающий в себя две концентрично расположенных камеры 52A и 52B накопителя, работающие под различными давлениями, с целью компактности. Однако можно также предусмотреть отдельные накопители, каждый из которых имеет одну камеру накопителя.
Кроме того, в показанном варианте осуществления локализованное экстремальное направленное вверх отклонение узла 22 режущего аппарата показано, когда стержень 86 перемещен за пределы нормального положения остановки. Это можно обнаружить, например, посредством считывания давления текучей среды внутри камеры 94 для текучей среды под заданным давлением, используя датчик 102 и передавая выходной сигнал на контроллер 72. Можно также использовать другие способы индикации экстремального направленного вверх отклонения узла 22 режущего аппарата. Например, можно использовать один датчик давления, чтобы воспринимать увеличение давления внутри камеры 52B накопителя. Это является более простым способом определения состояния перегрузки в плавающем цилиндре 50, но он не обеспечивает индикацию того, что плавающий цилиндр 50 находится в состоянии перегрузки. В качестве альтернативы, можно воспринимать положение стержня 86, чтобы определять, превысила ли его длина хода нормальную длину хода в нормальном положении остановки. Стержень 86 можно закодировать, например, магнитным или оптическим кодом, чтобы определять, когда стержень 86 прошел нормальное положение остановки. Кроме того, можно воспринимать угловое положение каждого плавающего рычага 28 относительно каркаса 26, чтобы определять, когда плавающий рычаг 28 прошел нормальное положение остановки.
Независимо от конкретного используемого способа, мотовило 56 над плавающим рычагом 28, который определен для перемещения за пределы нормального положения остановки, автоматически поднимается, чтобы избежать вхождения в контакт зубцов с узлом 22 режущего аппарата, что может привести к повреждению ножей 42 и/или зубцов. Мотовило 56 можно поднимать, поднимая центральный опорный рычаг 58 мотовила и/или внешний опорный рычаг 60 мотовила. Продольное положение конкретного плавающего рычага 28 относительно опорных рычагов 58 и 60 можно использовать для определения степени, до которой опорный рычаг (опорные рычаги) 58 и/или 60 необходимо поднимать, чтобы избежать взаимодействия между зубцами и узлом 22 режущего аппарата. В случае если точное положение стержня 86 неизвестно после прохождения за пределы нормального положения остановки, например, при использовании описанного выше гидравлического пассивного стопора плавающих цилиндров 28, то мотовило 56 можно перемещать до степени, необходимой для обеспечения зазора, когда второй фиксатор 100 плавающего поршня 82 находится в максимальном положении остановки при перегрузке непосредственно рядом с дальним концом 88. С другой стороны, когда точное положение стержня 86 после перемещения за пределы нормального положения остановки известно, например, благодаря считыванию длины хода стержня 86 или угловой ориентации плавающего рычага 28, тогда мотовило 56 перемещают только до степени, необходимой для обеспечения зазора с узлом 22 режущего аппарата (то есть в этом случае не потребуется дополнительного запаса безопасности). Бортовой контроллер 72 принимает один или более сигналов датчика, показывающих, что плавающий рычаг 28 переместился за пределы нормального положения остановки, (необязательно) относительное местоположение плавающего рычага 28, и (необязательно) степень перемещения за пределы нормального положения остановки, и приводит в действие опорный рычаг 58 и/или 60 мотовила, соответственно. В качестве более простого подхода, также можно поднимать оба мотовила 56 на заданное расстояние после определения, что один или более плавающих рычагов 28 находятся в состоянии перегрузки.
Во время процесса сбора сельскохозяйственной культуры, платформенную жатку 12 располагают в "плавающее" положение, когда комбайн 10 проходит по земле. Как правило, участок начинают, делая несколько кругов по периферии участка. Затем комбайн 10 перемещают назад и вперед через участок, причем комбайн смещают приблизительно на ширину платформенной жатки 12 для каждого прохода через участок. На противоположных концах участка, платформенную жатку 12 поднимают, в то время как комбайн поворачивают для следующего прохода. При нормальных рабочих режимах, наружные концы плавающих рычагов 28 плавают вверх и вниз между верхним и нижним нормальными положениями остановки, когда платформенная жатка 12 перемещается через участок. В случае столкновения узла 22 режущего аппарата с крутым локализованным выступом земли (Фиг.6), контроллер 72 определяет, чтобы плавающий рычаг 28 переместился за пределы нормального положения остановки, и приводит в действие опорный рычаг 58 и/или 60 мотовила, чтобы обеспечить безопасное расстояние между зубцами и узлом 22 режущего аппарата.
Был описан предпочтительный вариант осуществления изобретения, является очевидным, что могут быть выполнены различные модификации, не выходя за объем изобретения, определенный в прилагаемой формуле изобретения.
Группа изобретений относится к сельскохозяйственному машиностроению и может быть использована в уборочных машинах. Уборочная машина включает приемную камеру молотилки и прикрепленную к ней платформенную жатку с, по меньшей мере, одной секцией жатки и, по меньшей мере, одним мотовилом с опорными рычагами. Каждая секция жатки имеет каркас, узел режущего аппарата на передней кромке секции жатки и соединенный с узлом режущего аппарата индикатор избыточного локализованного отклонения. Каждая пара опорных рычагов мотовила соединена с соответствующим мотовилом и выполнена с возможностью перемещения к узлу режущего аппарата и от него в зависимости от состояния индикатора избыточного локализованного отклонения. Каждая секция жатки включает множество плавающих рычагов и бесконечный ремень. Плавающие рычаги шарнирно соединены с каркасом и поддерживают бесконечный ремень. Индикатор избыточного локализованного отклонения соединен с, по меньшей мере, одним плавающим рычагом. Группа изобретений обеспечивает возможность изгиба жатки на локализованном участке без вмешательства в действие вращающегося мотовила над жаткой. 3 н. и 26 з.п. ф-лы, 6 ил.
1. Сельскохозяйственная уборочная машина, содержащая
приемную камеру молотилки и
платформенную жатку, прикрепленную к указанной приемной камере
молотилки и включающую в себя:
по меньшей мере, одну секцию жатки, причем каждая секция жатки имеет каркас, узел режущего аппарата на передней кромке секции жатки и индикатор избыточного локализованного отклонения, соединенный с узлом режущего аппарата,
по меньшей мере, одно мотовило и,
по меньшей мере, одну пару опорных рычагов мотовила, при этом каждая пара опорных рычагов мотовила соединена с соответствующим мотовилом и выполнена с возможностью перемещения к узлу режущего аппарата и от него в зависимости от состояния индикатора избыточного локализованного отклонения,
причем каждая секция жатки включает в себя множество плавающих рычагов, шарнирно соединенных с каркасом, и бесконечный ремень, поддерживаемый множеством плавающих рычагов, при этом индикатор избыточного локализованного отклонения соединен с, по меньшей мере, одним плавающим рычагом.
2. Машина по п.1, в которой индикатор избыточного локализованного отклонения обеспечивает выходной сигнал, указывающий избыточное локализованное отклонение узла режущего аппарата, и включающая в себя контроллер, принимающий выходной сигнал и приводящий в действие, по меньшей мере, одну пару опорных рычагов мотовила.
3. Машина по п.2, в которой, по меньшей мере, одна пара опорных рычагов мотовила включает в себя первый опорный рычаг мотовила и второй опорный рычаг мотовила, причем контроллер выполнен с возможностью перемещения, по меньшей мере, одного из первого опорного рычага мотовила и второго опорного рычага мотовила.
4. Машина по п.3, в которой контроллер выполнен с возможностью перемещения каждого из первого опорного рычага мотовила и второго опорного рычага мотовила.
5. Машина по п.3, в которой, по меньшей мере, одно мотовило содержит два мотовила и включает в себя третий опорный рычаг мотовила, причем первый опорный рычаг мотовила и второй опорный рычаг мотовила содержат одну пару опорных рычагов мотовила, а второй опорный рычаг мотовила и третий опорный рычаг мотовила содержат другую указанную пару опорных рычагов мотовила.
6. Машина по п.5, в которой каждый из первого опорного рычага мотовила, второго опорного рычага мотовила и третьего опорного рычага мотовила выполнены с возможностью независимого перемещения с использованием контроллера.
7. Машина по п.1, в которой индикатор избыточного локализованного отклонения содержит множество индикаторов, причем каждый индикатор связан с соответствующим плавающим рычагом.
8. Машина по п.7, включающая в себя множество плавающих цилиндров, причем каждый плавающий цилиндр соединен с соответствующим плавающим рычагом и включает в себя пассивный стопор, при этом каждый из указанных индикаторов содержит одно из датчика давления и индикатора положения, соединенного с соответствующим плавающим цилиндром.
9. Машина по п.8, в которой каждый плавающий цилиндр включает в себя пассивный стопор, причем каждый индикатор соединен с соответствующим пассивным стопором.
10. Машина по п.1, в которой, по меньшей мере, одна секция жатки содержит множество секций жатки.
11. Машина по п.1, в которой множество секций жатки содержит три секции жатки.
12. Платформенная жатка для использования с сельскохозяйственной уборочной машиной, содержащая,
по меньшей мере, одну секцию жатки, причем каждая секция жатки имеет каркас, узел режущего аппарата на передней кромке секции жатки и индикатор избыточного локализованного отклонения, соединенный с узлом режущего аппарата,
по меньшей мере, одно мотовило, и,
по меньшей мере, одну пару опорных рычагов мотовила, при этом каждая пара опорных рычагов мотовила соединена с соответствующим мотовилом и выполнена с возможностью перемещения к узлу режущего аппарата и от него в зависимости от состояния индикатора избыточного локализованного отклонения,
причем каждая секция жатки включает в себя множество плавающих рычагов, шарнирно соединенных с каркасом, и бесконечный ремень, поддерживаемый множеством плавающих рычагов, при этом индикатор избыточного локализованного отклонения соединен с, по меньшей мере, одним плавающим рычагом.
13. Жатка по п.12, в которой индикатор избыточного локализованного отклонения обеспечивает выходной сигнал, указывающий избыточное локализованное отклонение узла режущего аппарата, и включающая в себя контроллер, принимающий выходной сигнал и приводящий в действие, по меньшей мере, одну пару опорных рычагов мотовила.
14. Жатка по п.13, в которой, по меньшей мере, одна пара опорных рычагов мотовила включает в себя первый опорный рычаг мотовила и второй опорный рычаг мотовила, причем контроллер выполнен с возможностью перемещения, по меньшей мере, одного из первого опорного рычага мотовила и второго опорного рычага мотовила.
15. Жатка по п.14, в которой контроллер выполнен с возможностью перемещения каждого из первого опорного рычага мотовила и второго опорного рычага мотовила.
16. Жатка по п.14, в которой, по меньшей мере, одно мотовило содержит два мотовила и включает в себя третий опорный рычаг мотовила, причем первый опорный рычаг мотовила и второй опорный рычаг мотовила содержат одну пару опорных рычагов мотовила, а второй опорный рычаг мотовила и третий опорный рычаг мотовила содержат другую пару опорных рычагов мотовила.
17. Жатка по п.16, в которой каждый из первого опорного рычага мотовила, второго опорного рычага мотовила и третьего опорного рычага мотовила выполнены с возможностью независимого перемещения с использованием контроллера.
18. Жатка по п.12, в которой индикатор избыточного локализованного отклонения содержит множество индикаторов, причем каждый индикатор соединен с соответствующим плавающим рычагом.
19. Жатка по п.18, включающая в себя множество плавающих цилиндров, причем каждый плавающий цилиндр соединен с соответствующим плавающим рычагом и включает в себя пассивный стопор, при этом каждый из указанных индикаторов содержит одно из датчика давления и индикатора положения, соединенного с соответствующим плавающим цилиндром.
20. Жатка по п.19, в которой каждый плавающий цилиндр включает в себя пассивный стопор, причем каждый индикатор соединен с соответствующим пассивным стопором.
21. Жатка по п.12, в которой, по меньшей мере, одна секция жатки содержит множество секций жатки.
22. Жатка по п.12, в которой множество секций жатки содержит три секции жатки.
23. Способ работы платформенной жатки в сельскохозяйственной уборочной машине, включающий этапы, на которых:
определяют избыточное локализованное отклонение узла режущего аппарата, и
перемещают, по меньшей мере, одно мотовило от узла режущего аппарата в зависимости от определяемого избыточного локализованного отклонения узла режущего аппарата,
при этом платформенная жатка включает в себя множество плавающих рычагов, поддерживающих узел режущего аппарата, а этап определения включает в себя определение положения, по меньшей мере, одного плавающего рычага.
24. Способ по п.23, включающий в себя этап, на котором выдают выходной сигнал от индикатора избыточного локализованного отклонения к контроллеру, указывающему избыточное локализованное отклонение узла режущего аппарата, причем контроллер приводит в действие, по меньшей мере, одну пару опорных рычагов мотовила, тем самым перемещая, по меньшей мере, одно мотовило от узла режущего аппарата.
25. Способ по п.24, в котором, по меньшей мере, одна пара опорных рычагов мотовила включает в себя первый опорный рычаг мотовила и второй опорный рычаг мотовила, причем контроллер перемещает, по меньшей мере, один из первого опорного рычага мотовила и второго опорного рычага мотовила.
26. Способ по п.25, в котором контроллер перемещает каждый из первого опорного рычага мотовила и второго опорного рычага мотовила.
27. Способ по п.25, в котором, по меньшей мере, одно мотовило содержит два мотовила и включает в себя третий опорный рычаг мотовила, причем первый опорный рычаг мотовила и второй опорный рычаг мотовила содержат одну пару опорных рычагов мотовила, а второй опорный рычаг мотовила и третий опорный рычаг мотовила содержат другую пару опорных рычагов мотовила.
28. Способ по п.27, в котором контроллер независимо перемещает каждый из первого опорного рычага мотовила, второго опорного рычага мотовила и третьего опорного рычага мотовила.
29. Способ по п.23, в котором платформенная жатка включает в себя множество плавающих рычагов, поддерживающих узел режущего аппарата, и множество плавающих цилиндров, причем каждый плавающий цилиндр соединен с соответствующим плавающим рычагом, причем этап определения включает в себя определение положения, по меньшей мере, одного плавающего цилиндра.
| US 4204383 А, 27.05.1980 | |||
| Жатка зерноуборочного комбайна | 1988 |
|
SU1828389A3 |
| МЕХАНИЗМ НАВЕСКИ ЖАТКИ КОСОГОРНОГО КОМБАЙНА | 0 |
|
SU332804A1 |
| Жатка зерноуборочного комбайна | 1986 |
|
SU1347891A1 |
| УСТРОЙСТВО ДЛЯ ГЕНЕРАЦИИ БИОЛОГИЧЕСКИ АКТИВНЫХ НАНОАЭРОЗОЛЕЙ | 2016 |
|
RU2629353C1 |

