Заявляемое изобретение относится к космической технике. Областью применения изобретения является управление движением сервисных космических аппаратов, предназначенных для удаления объектов космического мусора (ОКМ) с геостационарной орбиты (ГСО). Изобретение может быть использовано для изменения (как правило, уменьшения) величины отклонения направления импульса коррекции от фактического центра масс космических аппаратов, эксплуатируемых с изменяемым положением фактического центра масс.
Известны способы управления движением КА, заключающиеся в выдаче импульса коррекции орбиты КА, направленного (как и вектор тяги соответствующего двигателя) через центр масс КА, расположенный на оси КА, перпендикулярной плоскости, в которой расположены центры масс топливных баков, с использованием двигателей ориентации для управления вращением КА по направлениям трех осей (тангаж, крен, рыскание). Например, источники: [1] - RU №2092398 «Космический аппарат блочно-модульного исполнения», Научно-производственное объединение прикладной механики; [2] - RU №2149805 «Реактивная система управления движением космического аппарата», Опытное конструкторское бюро «Факел»; [3] - RU №2115008 «Устройство управления движением космического аппарата» и [4] - RU №2220077 «Пилотируемый космический корабль», Открытое акционерное общество «Ракетно-космическая корпорация «Энергия» им. С.П. Королева». Известны также способы управления движением КА, в том числе с применением двигателей с регулируемой по величине тягой, приведенные в источнике [5] - RU №2309876 «Способ управления движением космического аппарата и система управления», Федеральное государственное научное учреждение «Государственный научно-исследовательский институт прикладной механики и электродинамики».
Сервисные космические аппараты, как правило, оснащены узлом захвата ОКМ и дополнительным запасом топлива, величина которого зависит от количества заданных к удалению ОКМ. Описание применения сервисного КА приведено, например, в работе [6] - патент RU №2559392 «Способ удаления с геостационарной орбиты нефункционирующего космического аппарата», ФГУП ЦНИИмаш. Доля массы топлива в КА данного типа от общей массы КА, в зависимости от требований назначения, по предварительным оценкам, может составлять до 30%. Вместе с этим, задачей сервисных КА является захват, то есть присоединение к собственной конструкции ОКМ, например, в виде нефункционирующего космического аппарата, подлежащего удалению с ГСО. В подобных случаях, масса удаляемого с ГСО объекта космического мусора может существенно превышать массу самого сервисного КА. Данные факторы определяют положение центра масс связи СКА и ОКМ после их объединения, например, для последующей доставки ОКМ с ГСО на заданную орбиту.
Далее по тексту в рамках данной заявки использованы термины «начальный центр масс СКА», «фактический центр масс СКА», «начальный центр масс связки» и «фактический центр масс связки». «Начальный центр масс СКА» - это точка, соответствующая положению центра масс СКА, определенного на начало эксплуатации с учетом массы заправляемого топлива, через которую проходят направления векторов тяги двигателей коррекции. «Фактический центр масс СКА» - это точка, соответствующая положению центра масс СКА, определенного на текущий момент времени при эксплуатации КА (после выработки части топлива), например, путем выдачи предварительного импульса коррекции, определения величины возмущающего момента и, соответственно, положения фактического центра масс СКА на текущий момент времени. «Начальный центр масс связки» - это расчетная точка, определяемая теоретически на основе данных по конструкции и эксплуатационным характеристикам СКА, а также на основе данных по конструкции и эксплуатационным характеристикам конкретного ОКМ, планируемого к удалению с ГСО при «правильном» его захвате. При выполнении захвата объекта космического мусора и формировании связки, возможно возникновение осевых и радиальных смещений ОКМ относительно осей СКА, например, из-за динамики фактического сближения СКА и ОКМ, операционного несовершенства процедуры захвата, деформации узла захвата и контактных поверхностей ОКМ. Соответственно, положение «фактического центра масс связки» может существенно отличаться от положения «начального центра масс связки». «Фактический центр масс связки» - это точка, соответствующая положению центра масс связки СКА и ОКМ, определенного на текущий момент времени при эксплуатации КА (после захвата ОКМ и выработки части топлива СКА), например, путем выдачи предварительного импульса коррекции, определения величины и направления возмущающего момента и, соответственно, положения фактического центра масс связки на текущий момент времени. Алгоритмы определения фактического положения центра масс КА описаны, например, в источнике [7] - патент РФ - RU №2114031 «Способ определения положения центра масс космического аппарата в процессе его управления с помощью силовых приводов», Ракетно-космическая корпорация «Энергия» им.С.П. Королева и в источнике [8] -патент РФ - RU №2270789 «Способ управления движением космического аппарата», Ракетно-космическая корпорация «Энергия» им.С.П. Королева.
Для обеспечения движения связки СКА и ОКМ в заданном направлении, возмущающий момент, возникающий, например, из-за отклонения направления импульса коррекции двигателей СКА от фактического центра масс связки, необходимо либо компенсировать, либо свести к минимуму. Для его компенсации требуется создание эквивалентного управляющего момента, что в конечном счете связано с большими дополнительными затратами бортовых запасов топлива, предназначенного для двигателей ориентации. Свести к минимуму возмущающий момент в описанном случае возможно, например, за счет управления направлением вектора тяги. При этом вектор тяги двигателя СКА должен быть направлен как можно ближе к фактическому центру масс связки СКА и ОКМ.
Прототипом способа управления движением космического аппарата выбран способ, реализуемый с помощью устройства, описанного в работе [3] - RU №2115008 «Устройство управления движением космического аппарата».
Данный источник описывает устройство управления движением космического аппарата, содержащее исполнительные органы в виде двигателей-маховиков, блок управления двигателями-маховиками с измерителями векторов их угловой скорости, а также один или более электроракетных двигателей с управляемой по направлению тягой. Электроракетные двигатели установлены с обеспечением возможности прохождения линий действия их тяг вне центра масс космического аппарата. В состав устройства включен блок управления направлением тяги электроракетных двигателей, причем измеритель угловой скорости вращения каждого двигателя-маховика соединен с блоком управления направлением тяги электроракетных двигателей. Возможность управления направлением тяги обеспечивается тем, что электроракетный двигатель выполнен в виде плазменного ускорителя с замкнутым дрейфом электронов, в котором, по меньшей мере, один источник магнитодвижущей силы в виде управляющей катушки намагничивания подключен к блоку управления направлением тяги. Способ, реализуемый с помощью данного устройства, заключается в том, что управление движением вокруг центра масс КА и движением центра масс КА осуществляют одними и теми же исполнительными органами -электроракетными двигателями (ЭРД) с отклоняемыми векторами тяги. Отклонение вектора тяги по данному способу выполняют для создания разгрузочного момента при накоплении электрическим двигателем-маховиком предельной угловой скорости.
Недостатком подобного способа управления движением, например, применительно к задачам сервисных космических аппаратов является невозможность изменения величины отклонения направления импульса коррекции от фактического центра масс связки СКА и ОКМ. При существенных значениях величины отклонения направления импульса коррекции от фактического центра масс связки, например, при смещении центра масс связки относительно осей СКА, при включении двигателя коррекции, возникает пропорциональный возмущающий момент, для компенсации которого необходимо создавать управляющий момент двигателем-маховиком. Для создания разгрузочного момента двигателя-маховика необходимо включить двигатели ориентации (в способе прототипе - ЭРД с отклоняемыми векторами тяги). Это приводит к снижению эффективности работы двигателей коррекции, так как часть топлива расходуется не на поступательное движение космического аппарата, а на формирование возмущающего момента. Кроме этого топливо расходуется для компенсации данного возмущающего момента. В результате увеличивается расход бортового запаса топлива и снижается срок активного существования КА в целом.
Данная проблема наиболее характерна для СКА, предназначенных для многократного использования с целью удаления с ГСО различных типов ОКМ. При выполнении каждой конкретной задачи по удалению различных ОКМ фактический центр масс связки может находиться в разных положениях относительно осей СКА. Таким образом, в каждом случае, при выдаче импульса коррекции орбиты связки СКА и ОКМ определенным двигателем СКА будут создаваться возмущающие моменты различные по величине и направлению относительно осей СКА.
Технической проблемой изобретения является снижение расхода бортовых запасов топлива при выполнении коррекции орбиты связки СКА и ОКМ.
Эта техническая проблема решается за счет того, что способ управления движением сервисным космическим аппаратом заключается в том, что используют космический аппарат, направления векторов тяги двигателей коррекции которого проходят через начальный центр масс сервисного космического аппарата, расположенный на оси сервисного космического аппарата, перпендикулярной плоскости, в которой расположены центры масс топливных баков; после достижения геостационарной орбиты производят раскрытие трансформируемых штанг с двигателями коррекции, которые центрально симметрично размещаются в плоскости, проходящей через начальный центр масс связки; производят присоединение через узел захвата объекта космического мусора (ОКМ), стабилизацию и ориентацию связки; двигателем коррекции, вектор тяги которого проходит через начальный центр масс сервисного космического аппарата, выдают предварительный импульс коррекции, определяют величину и направление возмущающего момента и соответствующего фактического отклонения направления импульса коррекции от фактического центра масс связки, определяют положение фактического центра масс связки; повторно выполняют выдачу предварительного импульса расположенными на трансформируемых штангах двигателями коррекции, векторы тяги которых направлены противоположно положению узла захвата и вырабатываемый поток плазмы не попадает в габариты ОКМ; повторно определяют положение фактического центра масс связки, при удовлетворительном результате приступают к плановой коррекции орбиты связки; для выполнения плановой коррекции орбиты связки выбирают комбинацию и режимы работы двигателей коррекции, при которых фактический центр масс связки находится на наименьшем расстоянии от оси вектора тяги или равнодействующей векторов тяги выбранных двигателей.
В состав комплекса предлагаемого для решения технической проблемы, входит, например, геостационарный космический аппарат с системой коррекции (например, на основе стационарных плазменных двигателей), включающей в себя двигатели коррекции, направления векторов тяги которых проходят через начальный центр масс космического аппарата, расположенный на оси космического аппарата перпендикулярной плоскости, в которой расположены центры масс топливных баков, и совпадающей с осью узла захвата.
Суть изобретения поясняется графическими изображениями - фиг. 1 - фиг. 3.
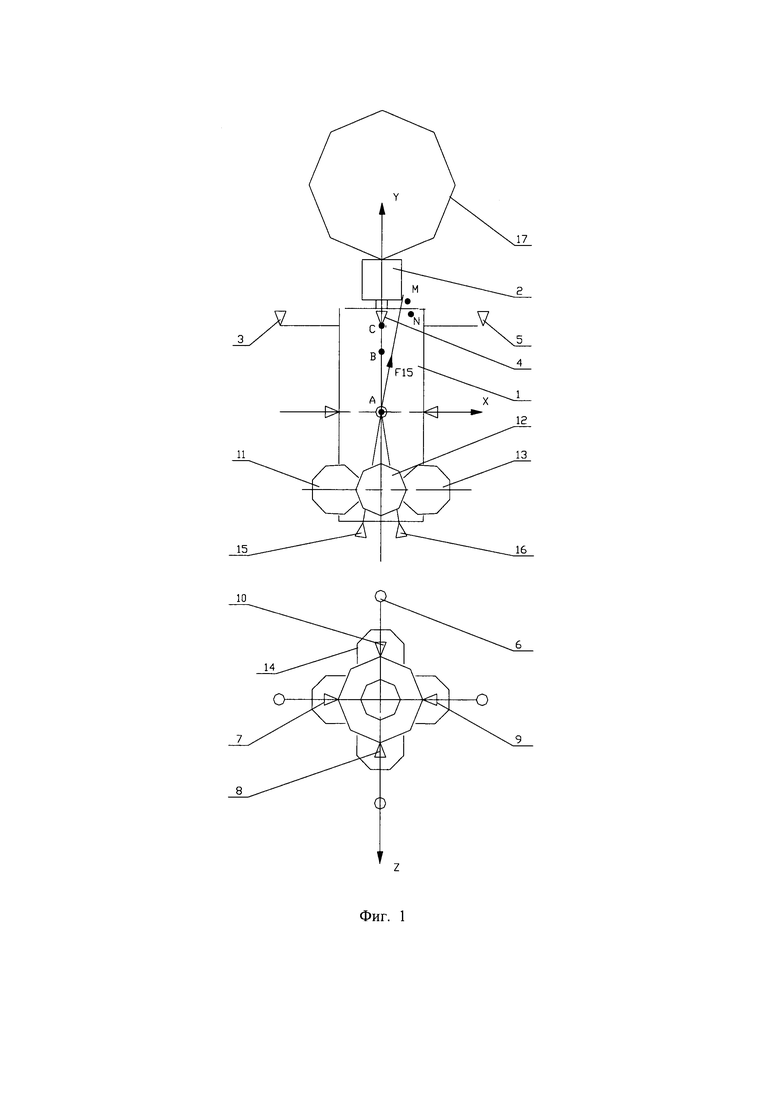
На фиг. 1 показана схема комплекса, на основе которого реализуют предлагаемый способ управления движением сервисного космического аппарата.
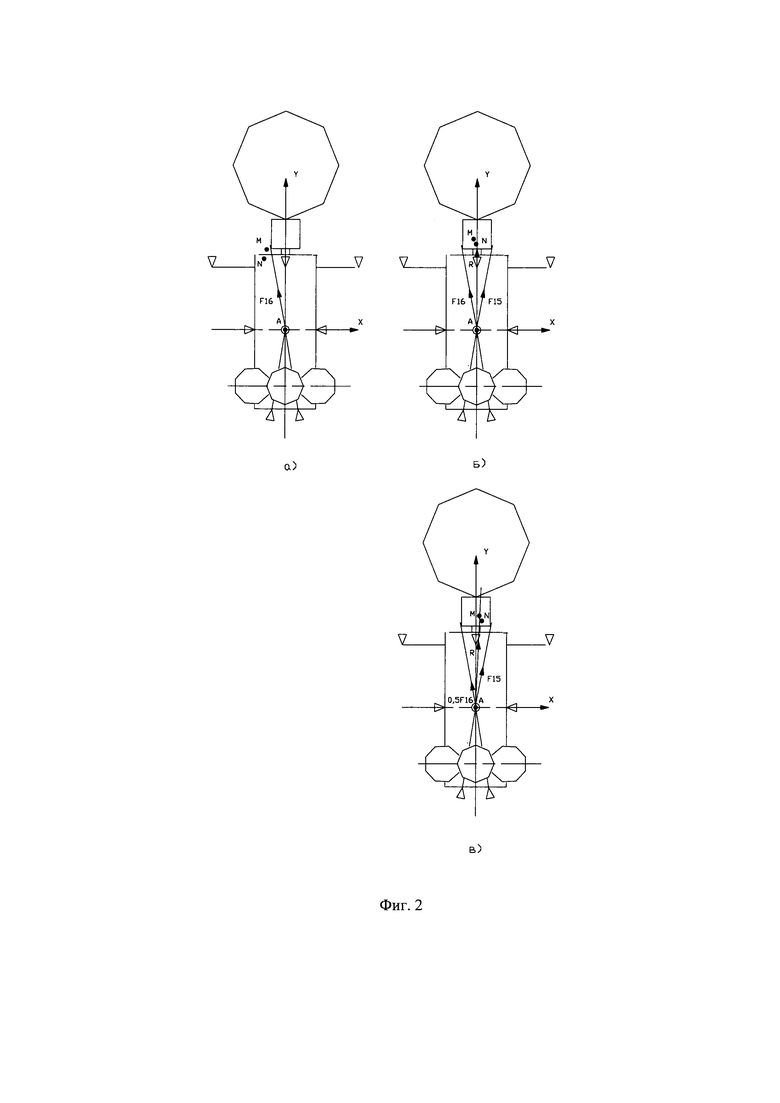
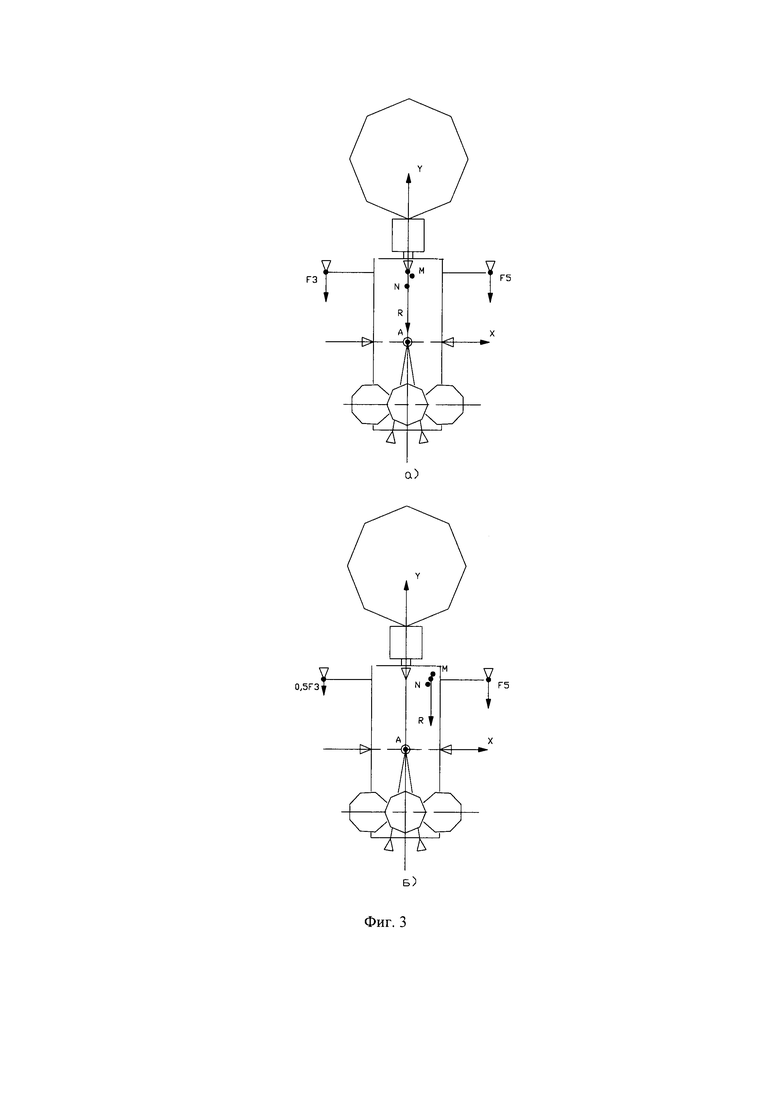
На фиг. 2 и фиг. 3 показаны примеры взаимного расположения векторов тяги относительно точек М и N, определяющих положение фактического центра масс связки, при различных режимах работы выбранной комбинации двигателей коррекции.
Комплекс (см. фиг. 1) представляет собой космический аппарат 1, в состав которого входят все системы, необходимые для его полноценного функционирования. Например, бортовой комплекс управления, включающий в себя бортовой цифровой вычислительный комплекс с программным обеспечением, системы коррекции, электропитания, ориентации и стабилизации включая, например, термокаталитические двигатели ориентации, терморегулирования и т.п.Элементы, не имеющие прямого отношения к заявляемому способу, далее не рассматриваются. На оси, перпендикулярной плоскости, в которой расположены центры масс топливных баков 11, 12, 13 и 14 находится начальный центр масс СКА - точка А. На этой же оси на корпусе СКА размещен узел захвата 2. Предполагается, что конструкция узла захвата рассчитана на поочередный захват определенного количества ОКМ определенного типа и известной конструкции. Захват предусматривает определенно ориентированную фиксацию каждого конкретного захваченного объекта с определенным допуском по смещению центра масс захваченного объекта относительно осей СКА (X Y Z). После захвата и до завершения доставки ОКМ на заданную орбиту положение фактического центра масс связки СКА и ОКМ будет изменяться преимущественно за счет выработки топлива в баках СКА. Предполагается, что узел захвата при перелете на заданную орбиту предусматривает два основных варианта движения СКА: СКА буксирует ОКМ перед собой; СКА тянет ОКМ за собой. На этапе транспортирования положение ОКМ относительно СКА не меняется. Подробно конструкция узла захвата в рамках данной заявки не рассматривается. На корпусе СКА на центрально симметричных трансформируемых штангах установлены четыре двигателя коррекции 3, 4, 5, 6. После раскрытия трансформируемых штанг указанные двигатели центрально симметрично размещаются в плоскости, проходящей через точку С -начальный центр масс связки. Точка С расположена на одной оси с начальным центром СКА - точкой А. Векторы тяги данных двигателей направлены параллельно оси, на которой расположены начальные центры масс СКА и связки СКА с ОКМ (точки А и С) и направлены в сторону узла захвата. Габариты штанг и схема установки двигателей 3, 4, 5, 6 предусматривают возможность одновременной работы, как минимум, двух двигателей, исключая попадание прямого потока генерируемой плазмы в габариты захваченного объекта космического мусора 17. На корпусе СКА центрально симметрично в плоскости, проходящей через начальный центр масс СКА - точку А, установлены четыре двигателя коррекции 7, 8, 9, 10. Также, на корпусе СКА на торце, противоположном узлу захвата, установлены два двигателя коррекции 15 и 16. Векторы тяги двигателей 7, 8, 9, 10, 15 и 16 направлены через начальный центр масс СКА - точку А. Объект космического мусора 17 представляет собой, как отмечено выше, нефункционирующий космический аппарат определенного типа и известной конструкции, запланированный к удалению с ГСО. Методика захвата и положение ОКМ в узле захвата также определены и отработаны, например, с применением методов математического моделирования, на этапах подготовки миссии.
Пример осуществления способа управления движением сервисного космического аппарата.
После достижения ГСО, на этапе начальной подготовки, производят раскрытие трансформируемых штанг с двигателями коррекции 3, 4, 5, 6. Далее, в соответствии с программой эксплуатации, производят сближение СКА с заданным ОКМ. При этом, при маневрировании, захвате и стабилизации связки используют, при необходимости, все, имеющиеся в составе СКА, двигатели коррекции, а также средства ориентации и стабилизации. Выработка топлива из баков СКА при работе двигателей происходит одновременно и равномерно. После захвата ОКМ, стабилизации и ориентации связки выдают через определенный двигатель коррекции, например, через двигатель 15, предварительный (минимальный по продолжительности, но достаточный для регистрации возмущающего момента) импульс коррекции. С помощью средств системы ориентации определяют величину и направление возмущающего момента и соответствующего фактического отклонения направления импульса коррекции от фактического центра масс связки. Определяют положение фактического центра масс связки, находящийся для данного конкретного случая, например, в точке N. После этого связку с помощью средств ориентации и стабилизации стабилизируют по вращению относительно осей СКА. Далее выдают повторный предварительный импульс парой одновременно включаемых двигателей коррекции, установленных на трансформируемых штангах. При этом выбирают любую пару двигателей, которая при «правильном» (запланированном программой эксплуатации СКА) захвате ОКМ должна вырабатывать поток плазмы, не попадая в габариты ОКМ. Например, в соответствии с фиг. 1 - это двигатели 3 и 5. По результатам данного включения с помощью средств системы ориентации определяют величину и направление возмущающего момента и соответствующего фактического отклонения направления импульса коррекции от фактического центра масс связки. Повторно определяют положение фактического центра масс связки, находящегося для данного конкретного случая, например, в точке М. Сравнивают результаты, полученные при первом и втором определении фактического центра масс и, при удовлетворительном результате, например, при величине взаимного отклонения положений точек М и N, не превышающей пределов, допускаемых эксплуатационной документацией, приступают к этапу плановой коррекции орбиты связки - переводу связки на заданную орбиту. (Примечание. Дополнительно, результаты, полученные при выдаче предварительного импульса коррекции двигателями 3 и 5, используют для определения фактических направлений потоков плазмы, вырабатываемых двигателями относительно габаритов ОКМ. По величинам и направлениям ожидаемого и фактически полученного возмущающих моментов определяют: попадает поток в габариты ОКМ, или нет. Результат учитывают для выбора комбинации двигателей при проведении коррекции).
Для проведения плановой коррекции орбиты связки, учитывая положение фактического центра масс связки, определяют комбинацию и режимы работы двигателей коррекции, которые наиболее рационально, с точки зрения эффективного расхода бортовых запасов топлива, использовать для выполнения данной задачи. При этом, при выборе комбинации и режимов работы двигателей коррекции, основными условиями являются: минимальный возмущающий момент и максимальная геометрическая эффективность (имеется в виду сложение векторов тяги), получаемые при работе двигателей коррекции. Соответственно, отклонение линии, по которой направлен вектор тяги, или равнодействующая векторов тяги двигателей от точки, определяющей положение фактического центра масс связки, должно быть минимальным из всех рассматриваемых комбинаций. Учитывая, что при соответствующей ориентации, связка для перевода на заданную орбиту, может двигаться в двух вариантах: толкая ОКМ перед собой, либо, буксируя его за собой, возможно рассмотрение различных комбинаций использования двигателей коррекции СКА.
В первом варианте, в случае наименьшего расстояния от фактического центра масс связки до линии, по которой направлен вектор тяги выбранного двигателя, движение связки может быть обеспечено следующими комбинациями двигателей коррекции: одним двигателем 15, одним двигателем 16, двумя двигателями 15 и 16. Кроме этого, могут быть использованы комбинации парных включений двигателей 15 и 16 с применением способа включения одного из двигателей в режиме с регулируемой по величине тягой. Графическое представление данных комбинаций включений приведено на фиг. 2.
Во втором варианте, в случае наименьшего расстояния от фактического центра масс связки до линии, по которой направлен вектор тяги выбранного двигателя, движение связки может быть обеспечено, например, следующими комбинациями двигателей коррекции: парой двигателей 3 и 5, парой двигателей 4 и 6, а также, этими же парами с применением способа включения одного из двигателей в режиме с регулируемой по величине тягой. Графическое представление данных режимов приведено на рисунке фиг. 3.
Из всех перечисленных комбинаций использования двигателей коррекции, для выполнения плановой коррекции орбиты связки выбирают ту, в которой фактический центр масс связки находится на наименьшем расстоянии от линии направления вектора тяги (или равнодействующей векторов тяги) выбранных двигателей. Размеры области, определяющей допускаемое в этом случае расположение фактического центра масс связки относительно указанной оси, определяются эксплуатационной документацией СКА. После выбора наиболее оптимальной комбинации и режима работы двигателей коррекции выполняют требуемую ориентацию связки, а затем - плановую коррекцию орбиты. Таким образом, выполняют перевод связки СКА и ОКМ на заданную орбиту с минимальным расходом бортовых запасов топлива на задачи коррекции и компенсации возмущающего момента.
В случаях нерасчетного смещения фактического центра масс связки для компенсации возмущающих моментов, по величине превышающих возможности средств ориентации и стабилизации СКА, могут быть использованы вышеописанные комбинации включений двигателей коррекции с использованием дополнительно двигателей коррекции 7, 8, 9, 10. В том числе, с использованием режимов регулируемой по величине тяги. Это позволит компенсировать возмущающие моменты большой величины двигателями с более высоким удельным импульсом, чем у двигателей ориентации (например, термокаталитических).
В части примеров реализации следует отметить следующее.
Комплекс, предлагаемый для решения технической проблемы, может быть создан на основе известных типов КА (и их комплектующих), изготавливаемых, например, АО «ИСС» имени академика М. Ф. Решетнева. Данные по КА изготовления АО «ИСС» приведены, например, в источнике [9] (АО «Информационные спутниковые системы» имени академика М. Ф. Решетнева». Более 55 лет в космосе, http://raaks.ru/docs/doc20170315 019.pdf). Сведения по конструктивному исполнению узлов захвата приведены, например, в источниках [10] - RU №2481942, «Адаптивное трехпалое захватное устройство» и [11] - RU №2620540, «Робототехническая система сервисного космического аппарата с силомоментной обратной связью», Федеральное государственное автономное научное учреждение «Центральный научно-исследовательский и опытно-конструкторский институт робототехники и технической кибернетики». Данные по применению стационарных плазменных двигателей в режиме регулируемой по величине тяги приведены в источнике [5] и в источнике [12] Duchemin О., Leroi V., Oberg М. et al, Electric Propulsion Thruster Assembly for Small GEO: End-to-End Testing and Final Delivery // The 33rd International Electric Propulsion Conference, The George Washington University • Washington, D.C. • USA October 6 - 10, 2013. Пример размещения двигателя коррекции на трансформируемой штанге приведен, например, в источнике [13] - RU №2271966 «Устройство двигательной установки космического аппарата», Федеральное государственное унитарное предприятие «Государственный космический научно-производственный центр им. М.В. Хруничева».
При реализации коррекции орбиты связки сервисного космического аппарата с объектом космического мусора при движении на заданную орбиту учитывают положение фактического центра масс связки, определяют комбинацию и режимы работы двигателей коррекции, которые наиболее рационально использовать с точки зрения минимизации затрат бортовых запасов топлива, решая этим техническую проблему по экономии топлива на борту космического аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОДЕЛИРОВАНИЯ ПРОЦЕССА УДАЛЕНИЯ КОСМИЧЕСКОГО МУСОРА | 2018 |
|
RU2689088C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2706293C1 |
| СПОСОБ БЕСКОНТАКТНОЙ ТРАНСПОРТИРОВКИ КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2568960C1 |
| СПОСОБ КОЛЛОКАЦИИ ПРИ ПЕРЕВОДЕ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ДРУГУЮ ДОЛГОТУ СТОЯНИЯ И УВОДЕ ЕГО НА ОРБИТУ ЗАХОРОНЕНИЯ | 2022 |
|
RU2786680C1 |
| СПОСОБ УВОДА ПРЕКРАТИВШИХ АКТИВНОЕ СУЩЕСТВОВАНИЕ КОСМИЧЕСКИХ АППАРАТОВ С РАБОЧИХ НАКЛОННЫХ И ЭКВАТОРИАЛЬНЫХ ОРБИТ В ПЛОТНЫЕ СЛОИ АТМОСФЕРЫ | 2018 |
|
RU2708406C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721813C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721812C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2021 |
|
RU2768994C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2018 |
|
RU2703696C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ, РАСПОЛОЖЕННЫХ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА | 2001 |
|
RU2197412C2 |
Изобретение относится к управлению движением сервисных космических аппаратов (СКА) реактивными двигателями коррекции (ДК) в операциях по удалению объектов космического мусора (ОКМ) с геостационарной орбиты. ДК установлены на трансформируемых штангах в районе узла захвата ОКМ и на торце СКА, противоположном узлу захвата. Тяга последних проходит через центр масс СКА и противоположна тяге ДК на штангах. После захвата ОКМ последовательно сообщают СКА предварительные импульсы тяги теми и другими ДК (стабилизируя связку ОКМ и СКА перед каждым включением ДК). По возмущающим моментам от ДК определяют фактические положения центра масс связки в обоих случаях. При допустимой величине взаимного отклонения обоих положений центра масс выполняют коррекцию орбиты связки теми ДК, комбинация и режимы работы которых дают наименьшее отклонение направления суммарного вектора тяги от фактического центра масс связки. Техническим результатом является снижение расхода топлива на борту СКА в операциях по удалению ОКМ. 3 ил.
Способ управления движением сервисного космического аппарата, направления векторов тяги двигателей коррекции которого проходят через начальный центр масс сервисного космического аппарата (СКА), расположенный на оси СКА, перпендикулярной плоскости, в которой расположены центры масс топливных баков, отличающийся тем, что после достижения геостационарной орбиты производят раскрытие трансформируемых штанг с двигателями коррекции, которые центрально симметрично размещаются в плоскости, проходящей через начальный центр масс связки, образуемой СКА и объектом космического мусора (ОКМ), производят присоединение через узел захвата ОКМ, стабилизацию и ориентацию связки, двигателем коррекции, вектор тяги которого проходит через начальный центр масс СКА, выдают предварительный импульс коррекции, определяют величину и направление возмущающего момента и соответствующего фактического отклонения направления импульса коррекции от фактического центра масс связки, определяют положение фактического центра масс связки, после чего связку повторно стабилизируют и выполняют выдачу предварительного импульса расположенными на трансформируемых штангах двигателями коррекции, векторы тяги которых направлены противоположно положению узла захвата, и вырабатываемый поток плазмы не попадает в габариты ОКМ, повторно определяют положение фактического центра масс связки, при допустимой величине взаимного отклонения обоих определенных положений фактического центра масс связки приступают к плановой коррекции орбиты связки, для выполнения которой выбирают комбинацию и режимы работы двигателей коррекции, при которых фактический центр масс связки находится на наименьшем расстоянии от оси вектора тяги или равнодействующей векторов тяги выбранных двигателей.
| US 6017000 A, 25.01.2000 | |||
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2003 |
|
RU2270789C2 |
| WO 2004054877 A1, 01.07.2004 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 1995 |
|
RU2115008C1 |
| СПОСОБ УДАЛЕНИЯ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ НЕФУНКЦИОНИРУЮЩЕГО КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2559392C1 |

