Изобретение относится к области авиационной и ракетной техники, преимущественно к узлам стыковки полезной нагрузки летательного аппарата, и может быть использовано для крепления подвесного оборудования, и других составных частей летательных аппаратов, которые необходимо быстро состыковать и расстыковать на летательном аппарате без дополнительного оборудования.
Прототип не найден.
Предлагаемый способ решает задачу: быстрая стыковка и расстыковка несущего соединения без специального инструмента.
Для достижения названного технического результата, в способе крепления полезной нагрузки беспилотного летательного аппарата, заключающемся в снабжении летательного аппарата механическим замком, выполненным с возможностью крепления полезной нагрузки к несущей конструкции путем их стыковки по контактным поверхностям, захвату силового элемента полезной нагрузки, повороту устройства захвата с последующим его стопорением, и отделением полезной нагрузки от несущей конструкции путем расфиксации устройства фиксации, состоящим из корпуса замка с полостью и крышкой корпуса замка, размещаемые в объеме летательного аппарата и закрепляемые на его поверхности с образованием входного окна полости, содержит устройство захвата, устанавливаемым в полости корпуса замка с обеспечением взаимодействия с фиксирующим звеном, устройством возврата и ползуном, устройства захвата выполняемого в виде цилиндра с возможностью вращения вокруг собственной оси и снабженного центральным продольным отверстием в стенках которого выполняют две концентричные спиралевидные канавки закрученные вдоль продольной оси с их заходом с торцевой поверхности и образующие входное окно устройства захвата крепления ползуна длиной и шириной равной длине и ширине входного окна полости корпуса замка, с противоположной торцевой поверхности устройства захвата выполняют отверстие для закрепления подвижной части устройства возврата, во внешних торцевых углах устройства захвата предусматривают посадочные места под установку опорных подшипников, на внешней цилиндрической поверхности выполняют отверстие стопорения фиксирующим звеном, крышку корпуса замка снабжают наружной резьбовой поверхностью и выполняют с полостью, в боковых стенках которой, для закрепления крышки устройства возврата, выполняется внутренняя резьбовая поверхность, а в донышке полости крышки с касанием боковой стенки выполняется цилиндрическое отверстие крепления неподвижной части устройства возврата и радиусная прорезь, средняя кривая которой, располагается концентрично отверстию для закрепления подвижной части устройства возврата в устройстве захвата, длину и взаимное положение радиусной прорези, цилиндрического отверстия в крышке корпуса замка и отверстия во внешней цилиндрической поверхности, входного окна, длину с шириной и кручение двух концентричных спиралевидных канавок в устройстве захвата выбирают из условия обеспечения необходимого угла поворота устройства захвата, а также обеспечения надежной фиксации и расфиксации ползуна крепления полезной нагрузки, корпус фиксирующего звена располагают концентрично отверстию стопорения устройства захвата фиксирующим звеном, на боковой стенке корпуса замка и закрепляют любым известным способом и снабжают прорезью в боковой стенке, выходящей на поверхность летательного аппарата и образующую полость, длину прорези выбирают из условия возможности фиксации и расфиксации фиксирующим звеном устройства захвата, фиксирующее звено выполняют в виде штока со штырем поджимаемые пружиной сжатия и устанавливают с упором на крышку фиксирующего звена установленную через резьбу на корпус фиксирующего звена, в боковой поверхности штока выполняют отверстие в котором фиксируют один конец рычага рассфиксации, а противоположный конец, через прорезь в образованную полость боковой стенки корпуса фиксирующего звена выводят на поверхность летательного аппарата, ползун является крепежным силовым элементом полезной нагрузки выполняемый в виде центрального тела, в поперечном сечении соответствующий форме входного окна полости корпуса замка ограниченного центральным продольным отверстием устройства захвата, контактную поверхность ползуна выполняют в виде цилиндра, длиной с шириной равной двум концентричным спиралевидным канавкам устройства захвата, и располагают перпендикулярно и симметрично на торце центрального тела ползуна вдоль направления входного окна полости корпуса замка. Отличительными признаками предлагаемого способа являются:
- устройство возврата выполнено в виде спиральной цилиндрической пружины, установленной с обжатием между крышками корпуса замка и устройства возврата;
- устройство возврата выполнено в виде спиральной пластинчатой пружины, установленной с обжатием между крышками корпуса замка и устройства возврата.
Благодаря наличию отличительных признаков в совокупности с известными, обеспечивается быстрая стыковка и расстыковка несущего соединения без специального инструмента.
Данный способ может найти применение на летательных аппаратах, имеющих требование быстрого монтажа и демонтажа полезной нагрузки.
Техническое решение поясняется устройством способа крепления полезной нагрузки беспилотного летательного аппарата, представленной на чертежах, фиг.1...7.
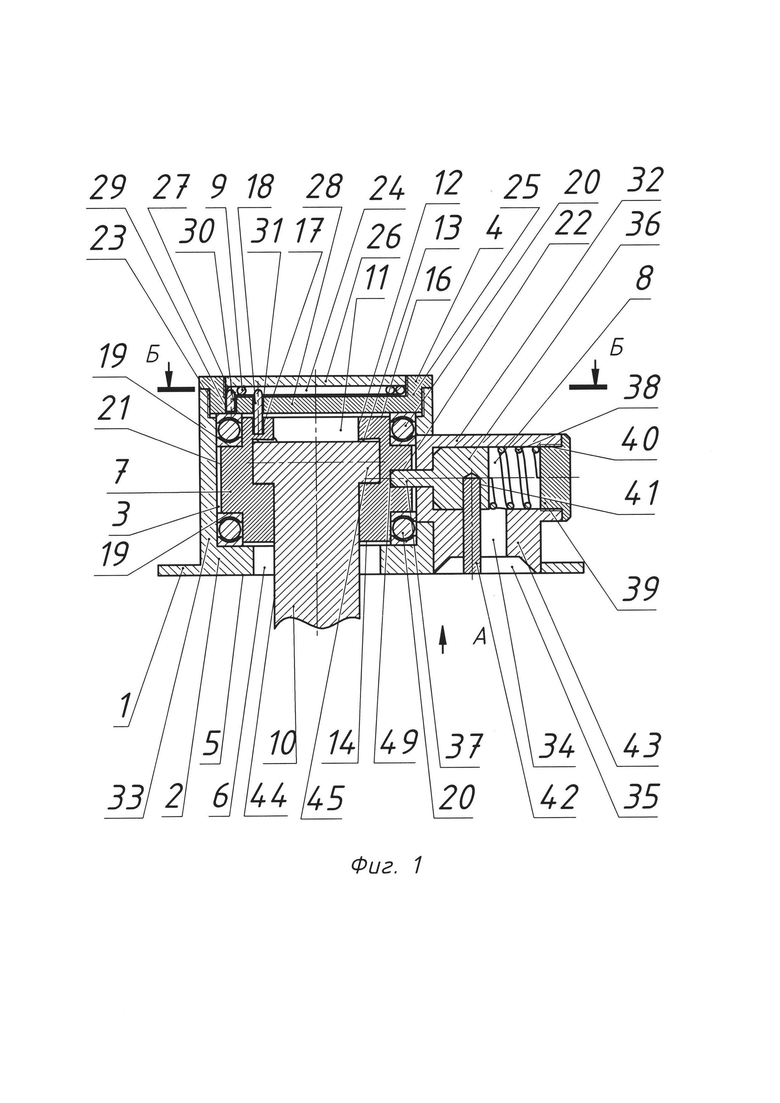
На фиг.1 представлено продольное сечение устройства крепления в состыкованном зафиксированном с ползуном состоянии;
На фиг.2, представлено продольное сечение устройства крепления в расстыкованном с ползуном состоянии;
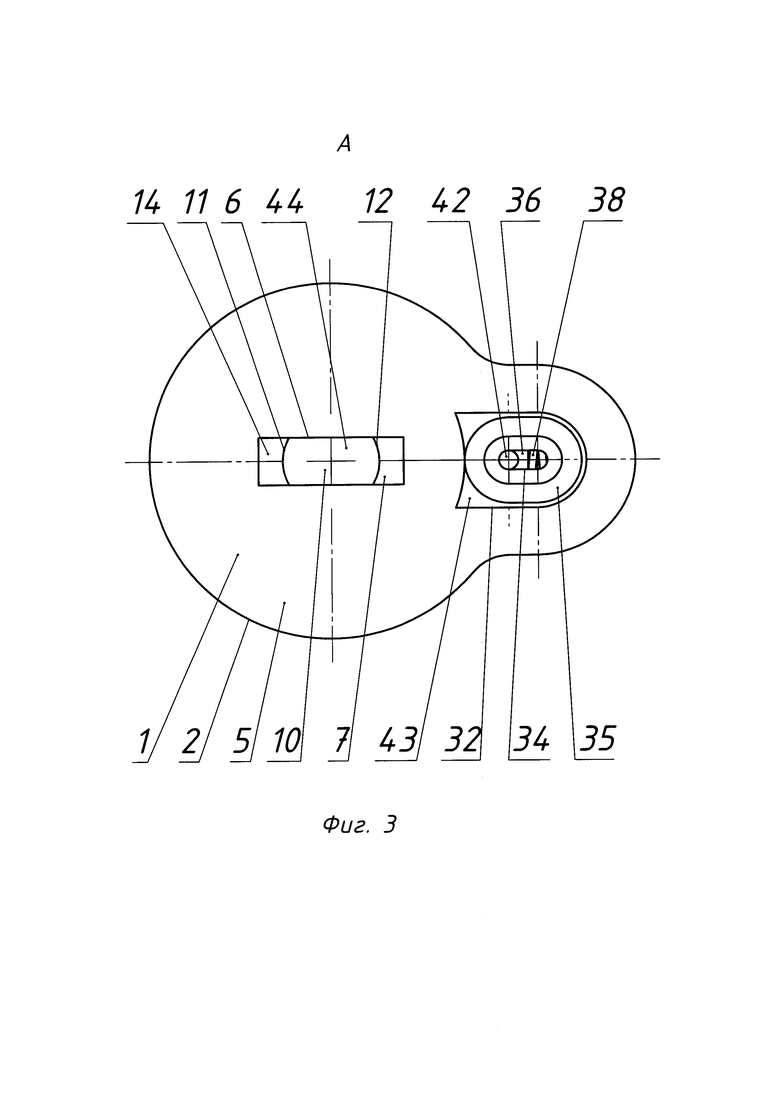
На фиг.3, представлен вид А фиг.1, с внешней стороны летательного аппарата на устройство крепления, поясняющий конструкцию устройства в состыкованном зафиксированном с ползуном состоянии;
На фиг.4, представлено сечение Б-Б фиг.1, поясняющее конструкцию устройства возврата с установленной спиральной цилиндрической пружиной в состыкованном зафиксированном с ползуном состоянии;
На фиг.5, представлен выносной элемент В фиг.4, поясняющий конструкцию устройства возврата с установленной спиральной пластинчатой пружиной в состыкованном зафиксированном с ползуном состоянии;
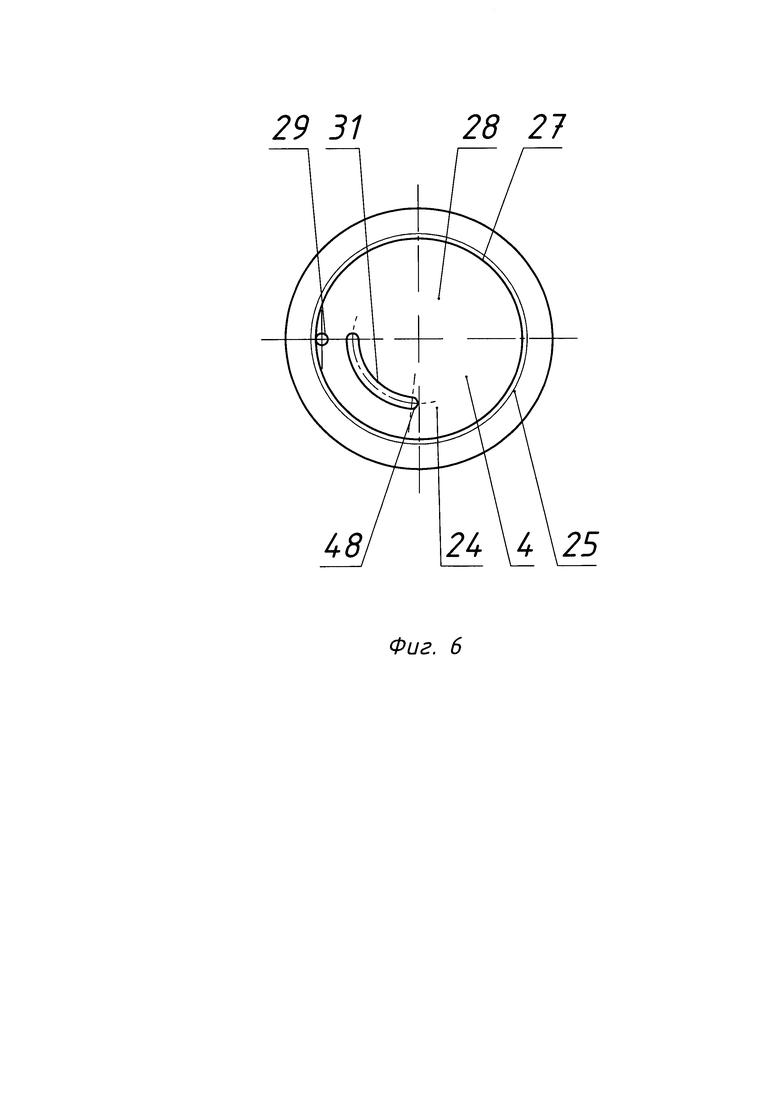
На фиг.6 представлен вид сверху на крышку корпуса замка поясняющий конструкцию, взаимное положение радиусной прорези и отверстия;
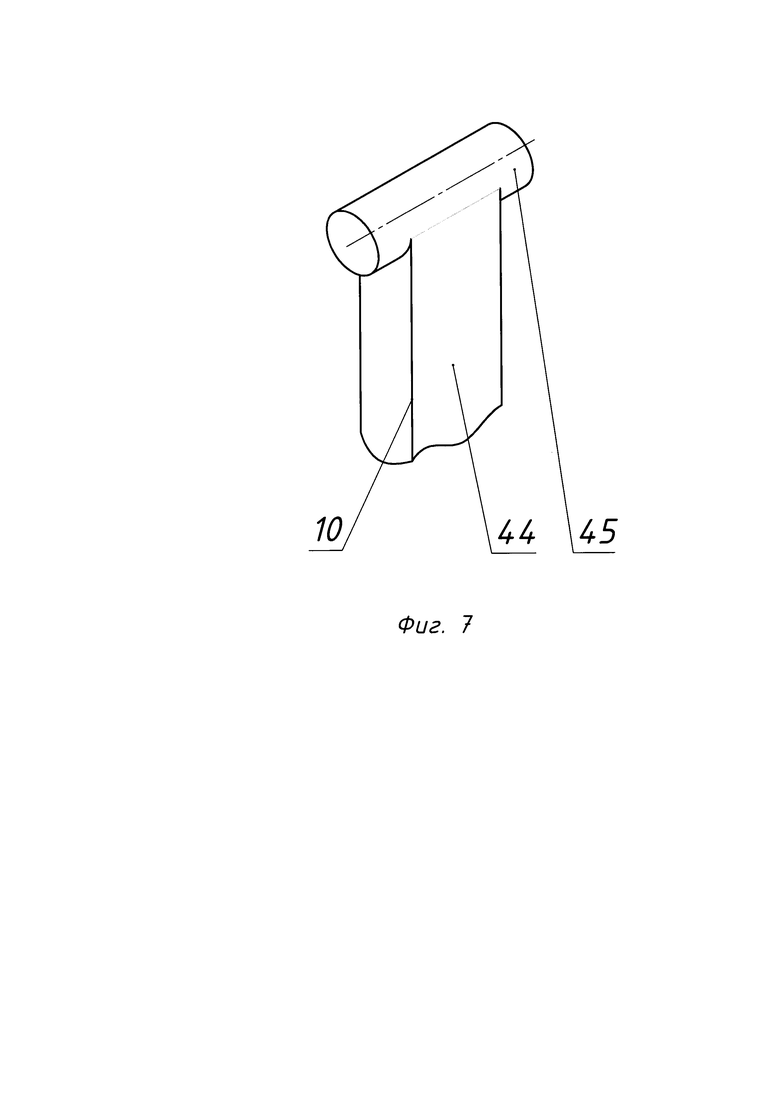
На фиг.7 представлен вид в изометрии поясняющий конструкцию ползуна.
Способ крепления полезной нагрузки беспилотного летательного аппарата включает в себя механический замок 1 состоящий из корпуса замка 2 с полостью 3 снабженный крышкой 4 корпуса замка 2, размещенные в объеме летательного аппарата и закрепленные на его поверхности 5 с образованием входного окна полости 6, устройство захвата 7, установленного в полости 3 корпуса замка 2 с обеспечением взаимодействия с фиксирующим звеном 8, устройством возврата 9 и ползуном 10. Устройство захвата 7 выполняют в виде цилиндра с возможностью вращения вокруг собственной оси снабженного центральным продольным отверстием 11 в стенках 12 которого выполняют две концентричные спиралевидные канавки 13 закрученные вдоль продольной оси с их заходом с торцевой поверхности 14 и образующих входное окно 15 устройства захвата 7 крепления ползуна 10 длиной и шириной равной длине и ширине входного окна полости 6 корпуса замка 2, с противоположной торцевой поверхности 16 устройства захвата 7 выполняют отверстие 17 для закрепления подвижной части устройства возврата 18, а во внешних торцевых углах -посадочные места 19 под установку опорных подшипников 20, на внешней цилиндрической поверхности 21 выполняют отверстие стопорения 22 фиксирующим звеном 8. Крышку 4 снабжают наружной резьбовой поверхностью 23 и выполняют с полостью 24, в боковых стенках которой 25, для закрепления крышки устройства возврата 26, выполняется внутренняя резьбовая поверхность 27, донышко полости крышки 28 с касанием боковой стенки 25 снабжают цилиндрическим отверстием 29 для закрепления неподвижной части устройства возврата 30 и радиусной прорезью 31, средняя кривая которой, располагается концентрично отверстию 17 для закрепления подвижной части 18 устройства возврата 9 в устройстве захвата 7, при этом, для надежной фиксации и расфиксации ползуна 10 крепления полезной нагрузки, длину и взаимное положение радиусной прорези 31, цилиндрического отверстия 29 в крышке 4 и отверстия 17, отверстия стопорения 22, входного окна 15, длину с шириной и кручение двух концентричных спиралевидных канавок 13 в устройстве захвата 7 выбирают из условия обеспечения необходимого угла поворота устройства захвата 7. Корпус фиксирующего звена 32 располагают концентрично отверстию стопорения 22 устройства захвата 7 фиксирующим звеном 8, на боковой стенке корпуса замка 33 и закрепляют любым известным способом, в боковой стенке корпуса фиксирующего звена 32 выполняют прорезь 34, выходящую на поверхность 5 летательного аппарата и образующую полость 35, длину прорези 34 выбирают из условия возможности фиксации и расфиксации фиксирующим звеном 8 устройства захвата 7, фиксирующее звено 8 выполняют в виде штока 36 со штырем 37 поджимаемого пружиной сжатия 38, установленной с упором на крышку фиксирующего звена 39 через резьбу 40 на корпус фиксирующего звена 32, в боковой поверхности штока выполняют отверстие 41 в котором фиксируют один конец рычага рассфиксации 42, а противоположный конец, через прорезь 34 в образующую полость 35 боковой стенки корпуса фиксирующего звена 43, выводят на поверхность 5 летательного аппарата. Ползун 10 является крепежным силовым элементом полезной нагрузки выполненным в виде центрального тела 44 по форме в поперечном сечении соответствующий форме входного окна полости 6 корпуса замка 2 ограниченного центральным продольным отверстием 11 устройства захвата 7, контактная поверхность ползуна 45 выполняется в виде цилиндра, длиной и шириной равной двум концентричным спиралевидным канавкам 13 устройства захвата 7, и располагается перпендикулярно и симметрично на торце центрального тела 44 ползуна 10 вдоль направления входного окна полости 6 корпуса замка 2. Устройство возврата 9 может быть выполнено в виде спиральной цилиндрической пружины 46, установленной с обжатием между крышками корпуса замка и устройства возврата 4 и 26 соответственно. Устройство возврата 9 может быть выполнено в виде спиральной пластинчатой пружины 47, установленной с обжатием между крышками корпуса замка и устройства возврата 4 и 26 соответственно.
Устройство крепления полезной нагрузки беспилотного летательного аппарата работает следующим образом:
Для стыковки полезной нагрузки с несущей конструкцией необходимо при закрытом положении механического замка 1 произвести его открытие путем перемещения рычага расфиксации 42 штока 36 фиксирующего звена 8 от устройства захвата 7, с обжатием вручную пружины сжатия 38 до выхода штыря 37 штока 36 из зацепления с устройством захвата 7, при этом пружина устройства возврата 9 повернет устройства захвата 7 вокруг собственной оси до контакта подвижной части устройства возврата 18 с конечным участком радиусной прорези 48 крышки 4 корпуса замка 2 концентрируя входное окно 15 устройства захвата 7 с входным окном полости 6 корпуса замка 2 и фиксируя открытое положение механического замка 1, после отпускания рычага расфиксации 42 пружина сжатия 38 переместит шток 36 к устройству захвата 7 до упора торцевой поверхности штыря 49 штока 36 на внешнюю цилиндрическую поверхность 21 устройства захвата 7 (Фиг. 1, 2, 3, 4, 5, 6, 7). Полезная нагрузка подводится к несущей конструкции и перемещаясь ползуном 10 внутрь механического замка 1 через входные окна полости корпуса замка и устройства захвата, 6 и 15 соответственно, скользя контактными поверхностями ползуна 45 по двум концентричным спиралевидным канавкам 13 и центральным телом 44 ползуна 10 по входному окну полости 6 корпуса замка 2 вращает устройство захвата 7 вокруг собственной оси взводя пружину устройства возврата 9 и скользя торцевой поверхностью штыря 49 штока 36 по внешней цилиндрической поверхности 21 устройства захвата 7 до концентричного положения отверстия стопорения 22 и штыря 37 штока 36 фиксирующего звена 8, после чего под действием пружины сжатия 38 штырь 37 штока 36 перемещается вглубь отверстия стопорения 22 фиксируя состыкованное положение ползуна 10 полезной нагрузки и механического замка 1 несущей конструкции (Фиг. 1, 2, 3, 4, 5). Для расстыковки полезной нагрузки и несущей конструкции необходимо переместить рычаг расфиксации 42 штока 36 фиксирующего звена 8 от устройства захвата 7, с обжатием вручную пружины сжатия 38 до выхода штыря 37 штока 36 из зацепления с устройством захвата 7, после чего полезную нагрузку необходимо вручную отвести от несущей конструкции, при этом ползун 10 скользя контактными поверхностями ползуна 45 по двум концентричным спиралевидным канавкам 13 и центральным телом 44 ползуна 10 по входному окну полости 6 корпуса замка 2 вращает устройство захвата 7 вокруг собственной оси в направлении противоположном направлению вращения при стыковки отпуская пружину устройства возврата 9 до контакта подвижной части устройства возврата 18 с конечным участком радиусной прорези 48 крышки 4 корпуса замка 2 концентрируя входное окно 15 устройства захвата 7 с входным окном полости 6 корпуса замка 2, после чего полезная нагрузка отводится на необходимое расстояние от несущей конструкции, а рычаг расфиксации 42 отпускается и пружина сжатия 38 перемещает шток 36 к устройству захвата 7 до упора торцевой поверхности штыря 49 штока 36 на внешнюю цилиндрическую поверхность 21 устройства захвата 7 фиксируя открытое положение механического замка 1 (Фиг. 1, 2, 3, 4, 5).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство крепления полезной нагрузки беспилотного летательного аппарата | 2022 |
|
RU2784627C1 |
| Способ крепления и автоматического отделения полезной нагрузки беспилотного летательного аппарата | 2023 |
|
RU2818007C1 |
| Устройство крепления и автоматического отделения полезной нагрузки беспилотного летательного аппарата | 2023 |
|
RU2817228C1 |
| Способ крепления и отделения полезной нагрузки | 2021 |
|
RU2769847C1 |
| Система крепления и отделения полезной нагрузки | 2021 |
|
RU2764879C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДОПОЛНИТЕЛЬНЫМИ СБРАСЫВАЕМЫМИ НАВЕСНЫМИ ТОПЛИВНЫМИ БАКАМИ | 2003 |
|
RU2244663C1 |
| Способ крепления крышки на окантовку люка | 2021 |
|
RU2764320C1 |
| Способ установки и крепления раскладываемого крыла беспилотного летательного аппарата | 2023 |
|
RU2826464C1 |
| Люк летательного аппарата | 2021 |
|
RU2770416C1 |
| Модульная система раскладываемого крыла беспилотного летательного аппарата | 2023 |
|
RU2826532C1 |



Изобретение относится к области авиационной и ракетной техники и касается узлов стыковки полезной нагрузки и составных частей летательных аппаратов (ЛА). Способ крепления заключается в снабжении ЛА механическим замком, выполненным с возможностью крепления к несущей конструкции полезной нагрузки путем их стыковки по контактным поверхностям, захвате силового элемента полезной нагрузки (ползун), повороте устройства захвата с последующим его стопорением и отделении несущей конструкции от полезной нагрузки путем расфиксации устройства фиксации. При этом устройство захвата выполнено в виде цилиндра с возможностью вращения вокруг оси и снабжено центральным продольным отверстием, в стенках которого выполнены две концентричные спиралевидные канавки, закрученные вдоль продольной оси с их заходом с торцевой поверхности и образующие входное окно устройства захвата крепления ползуна. Во внешних торцевых углах устройства захвата предусмотрены посадочные места под установку опорных подшипников. Достигается обеспечение быстрой стыковки и расстыковки несущего соединения без специального инструмента. 2 з.п. ф-лы, 7 ил.
1. Способ крепления полезной нагрузки беспилотного летательного аппарата, заключающийся в снабжении летательного аппарата механическим замком, выполненным с возможностью крепления к несущей конструкции полезной нагрузки путем их стыковки по контактным поверхностям, захвате силового элемента полезной нагрузки, повороте устройства захвата с последующим его стопорением и отделении несущей конструкции от полезной нагрузки путем расфиксации устройства фиксации, состоящим из корпуса замка с полостью и крышкой корпуса замка, размещаемых в объеме летательного аппарата и закрепляемых на его поверхности с образованием входного окна полости, устройства захвата, устанавливаемого в полости корпуса замка с обеспечением взаимодействия с фиксирующим звеном, устройством возврата и ползуном, состоящим из устройства захвата, выполняемого в виде цилиндра с возможностью вращения вокруг собственной оси и снабженного центральным продольным отверстием, в стенках которого выполняют две концентричные спиралевидные канавки, закрученные вдоль продольной оси с их заходом с торцевой поверхности и образующие входное окно устройства захвата крепления ползуна длиной и шириной, равной длине и ширине входного окна полости корпуса замка, с противоположной торцевой поверхности устройства захвата выполняют отверстие для закрепления подвижной части устройства возврата, во внешних торцевых углах устройства захвата предусматривают посадочные места под установку опорных подшипников, на внешней цилиндрической поверхности выполняют отверстие стопорения фиксирующим звеном, крышку корпуса замка снабжают наружной резьбовой поверхностью и выполняют с полостью, в боковых стенках которой для закрепления крышки устройства возврата выполняется внутренняя резьбовая поверхность, а в донышке полости крышки с касанием боковой стенки выполняется цилиндрическое отверстие крепления неподвижной части устройства возврата и радиусная прорезь, средняя кривая которой располагается концентрично отверстию для закрепления подвижной части устройства возврата в устройстве захвата, длину и взаимное положение радиусной прорези, цилиндрического отверстия в крышке корпуса замка и отверстия во внешней цилиндрической поверхности, входного окна, длину с шириной и кручение двух концентричных спиралевидных канавок в устройстве захвата выбирают из условия обеспечения необходимого угла поворота устройства захвата, а также обеспечения надежной фиксации и расфиксации ползуна крепления полезной нагрузки, корпус фиксирующего звена располагают концентрично отверстию стопорения устройства захвата фиксирующим звеном на боковой стенке корпуса замка, закрепляют любым известным способом и снабжают прорезью в боковой стенке, выходящей на поверхность летательного аппарата и образующей полость, длину прорези выбирают из условия возможности фиксации и расфиксации фиксирующим звеном устройства захвата, фиксирующее звено выполняют в виде штока со штырем, поджимаемыми пружиной сжатия, и устанавливают с упором на крышку фиксирующего звена, установленную через резьбу на корпус фиксирующего звена, в боковой поверхности штока выполняют отверстие, в котором фиксируют один конец рычага расфиксации, а противоположный конец через прорезь в образованную полость боковой стенки корпуса фиксирующего звена выводят на поверхность летательного аппарата, ползун является крепежным силовым элементом полезной нагрузки, выполняемым в виде центрального тела, в поперечном сечении соответствующим форме входного окна полости корпуса замка, ограниченного центральным продольным отверстием устройства захвата, контактную поверхность ползуна выполняют в виде цилиндра длиной и шириной, равной двум концентричным спиралевидным канавкам устройства захвата, и располагают перпендикулярно и симметрично на торце центрального тела ползуна вдоль направления входного окна полости корпуса замка.
2. Способ по п. 1, отличающийся тем, что устройство возврата выполнено в виде спиральной цилиндрической пружины, установленной с обжатием между крышками корпуса замка и устройства возврата.
3. Способ по п. 1, отличающийся тем, что устройство возврата выполнено в виде спиральной пластинчатой пружины, установленной с обжатием между крышками корпуса замка и устройства возврата.
| CN 210503193 U, 12.05.2020 | |||
| CN 110155332 А, 23.08.2019 | |||
| СИСТЕМА ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ ОТ КОСМИЧЕСКОГО АППАРАТА | 2009 |
|
RU2396190C1 |
| US 4067308 А1, 10.01.1978 | |||
| FR 2973778 А1, 12.10.2012 | |||
| Дозатор сыпучих материалов | 1980 |
|
SU956993A1 |

