Настоящая заявка относится к способу и устройству для мониторинга недр под целевой зоной.
Настоящее изобретение в целом относится к области сейсмического анализа и, в частности, к наблюдению за недрами и обнаружению аномалий в последних, например, обнаружению полостей под железными дорогами, автомобильными дорогами, зданиями, а также аэропортами.
Чтобы гарантировать безопасность пользователей наземной инфраструктуры, важно проводить мгновенный, временный или постоянный мониторинг недр для обнаружения любых подпочвенных аномалий, таких как полости, способных ослабить конструкции, имеющиеся на поверхности.
В статье под названием «Seismic interferometry of railroad induced ground motions: body and surface wave imaging», опубликованной в Geophysical Journal International - 205, 2016, стр.301-313, Diego A. QUIROS et al. предлагают способ генерации виртуальных путей распространения вдоль железнодорожного пути на основе интерферометрического анализа окружающего шума, захваченного с помощью одиночной приемной линии или датчиков сейсмических волн, расположенных вдоль железнодорожного пути.
Недостатком этого способа является ограниченный объем информации о недрах, получаемой непосредственно под линией датчиков и не позволяющий не только построить трехмерное изображение недр под железнодорожными путями, но и двумерное изображение линии грунта, параллельной железнодорожному пути.
Кроме того, в этом чисто пассивном способе шум от поездов смешивается с другими шумами и применяется, когда последние находятся на достаточном удалении от приемников, чтобы обеспечить примерно одинаковый уровень шума для датчиков в линии. Таким образом, общий уровень шумов относительно невелик и не позволяет проводить построение изображений.
Документы «Near-surface velocity imaging using traffic induced high-frequency ground motion», Н. NAKATA et al. (SEG 2017, p.2940-2945) и «Distributed acoustic sensing for seismic monitoring of the near surface: a traffic-noise interferometry case study» S. DOU et coll., Scientific Reports 2017; 7:11620 предлагают схожие подходы с теми же недостатками 2D-визуализации вблизи областей, которые необходимо изучить.
Целью настоящего изобретения является устранение недостатков предшествующего уровня техники.
Для этого настоящее изобретение предлагает способ мониторинга недр под целевой зоной в соответствии с п.1.
В частности, датчики сейсмических волн располагаются по обе стороны от целевой зоны, и идентифицированный источник сейсмического шума перемещается, по возможности, за пределы целевой зоны, и даже за пределы области, в которой установлены датчики. Способ включает регистрацию через определенные периоды волн, приходящих от источника, парами датчиков, при этом периоды выбираются таким образом, чтобы источник и пары датчиков были выровнены, при этом целевая зона располагается между парами датчиков, затем производится интерферометрическая реконструкция сейсмограммы на основе полученных данных. Далее на основе сейсмограммы строится изображение недр под целевой зоной.
Таким образом, использование, с одной стороны, мобильного источника сейсмического шума, характеристики которого известны благодаря анализу самого сигнала и не требуют априорной информации, а с другой стороны, как минимум двух датчиков, которые в течение определенного периода времени выровнены с этим источником шума, позволяет осуществлять пассивный мониторинг в пространстве-времени, а именно, в четырех измерениях, с большой амплитудой и высоким разрешением, той части недр, которая расположена под поверхностью, на которой размещены датчики, при условии, что мобильный источник шума выровнен с парой датчиков по меньшей мере некоторое время.
Таким образом, пара датчиков, расположенная по обе стороны от целевой зоны (например, железнодорожного пути), позволяет построить изображение недр под этой целевой зоной, если мобильный источник звука (например, поезд, проходящий по другому пути) передвигается поблизости от датчиков и хотя бы некоторое время выровнен с парой датчиков. Увеличение числа датчиков вокруг целевой зоны, например, путем их размещения параллельно каждой стороне железнодорожного пути или даже у рельсов железнодорожного пути, позволяет генерировать трехмерное изображение целевой зоны благодаря движению источника звука.
В определенном варианте реализации способ также включает этап предварительной обработки зарегистрированных сейсмических волн до этапа восстановления.
Это позволяет получать сигналы оптимального качества, что повышает точность получаемого изображения недр.
Достоинством этапа предварительной обработки является то, что он включает в себя операции по удалению помех и фильтрации частот.
Дополнительно этап предварительной обработки может в себя включать операцию спектрального отбеливания и/или операцию бинаризации.
Этот тип операции позволяет упростить последующую обработку при восстановлении сейсмограммы.
В определенном варианте реализации на этапе восстановления с помощью интерферометрии выполняется по крайнее мере одна операция взаимной корреляции сигналов от сейсмических волн, записанной соответствующей парой датчиков.
Это позволяет эффективно восстановить сейсмограмму.
В определенном варианте реализации этап записи выполняется непрерывно во времени.
Это позволяет создавать отчеты о состоянии недр с выбранной периодичностью, например, ежедневно, еженедельно или ежемесячно.
В определенном варианте реализации способ за этапом восстановления дополнительно включает этап суммирования восстановленных сигналов сейсмограммы, поступающих от множества мобильных источников шума, выровненных с соответствующей парой датчиков в различные периоды времени.
Этот этап суммирования позволяет повысить качество и надежность восстановления.
В определенном варианте реализации на этапе записи регистрируются поверхностные сейсмические волны.
В этом варианте реализации на этапе построения изображения:
определяются кривые дисперсии поверхностных волн в воссозданных сигналах сейсмограммы в заданном диапазоне частот;
проводится томография скорости сигналов, восстановленных на основе кривых дисперсии и
проводится инверсия поверхностных волновых скоростей восстановленных сигналов с тем, чтобы получить модель скорости P- и S-волн.
В определенном варианте реализации на этапе записи можно регистрировать преломленные сейсмические волны.
В этом варианте на этапе генерации изображения:
определяется время поступления восстановленных сигналов сейсмограммы, соответствующих преломленным сейсмическим волнам; и
проводится томография восстановленных сигналов, соответствующих преломленным волнам типа P на основе вышеупомянутых моментов поступления сигналов с тем, чтобы получить модель скорости P-волн.
В зависимости от конкретных характеристик, возможно регистрировать отраженные сейсмические волны, датчики могут включать по меньшей мере один геофон и/или по меньшей мере один акселерометр и/или по меньшей мере один датчик, основанный на использовании оптоволоконных кабелей (например, предназначенных для распределенного акустического зондирования), датчики должны располагаться по меньшей мере в две линии, или в узлах сетки с квадратными или шестиугольными ячейками и/или могут располагаться через равные расстояния.
Вышеупомянутой целевой зоной может выступать железнодорожный путь, дорога или другое инженерное сооружение или здание.
Целевой зоной может выступать один железнодорожный путь, а источником шума может являться поезд, движущийся по второму пути, который идет параллельно первому. Датчики могут быть расположены через равные интервалы на двух воображаемых линиях расположенных по обе стороны от первого железнодорожного пути и идущих параллельно ему.
С той же целью, что и означенная выше, настоящее изобретение также предлагает устройство для мониторинга недр под целевой зоной. Его отличительной особенностью является то, что оно включает элементы, необходимые для осуществления этапов процесса, кратко описанного выше.
Поскольку отдельные характеристики и преимущества устройства аналогичны характеристикам способа, они здесь не повторяются.
Другие аспекты и преимущества изобретения станут понятны после ознакомления с приведенным ниже подробным описанием конкретных вариантов реализации, выполненных в виде неограничивающих примеров со ссылкой на прилагаемые фигуры, в которых:
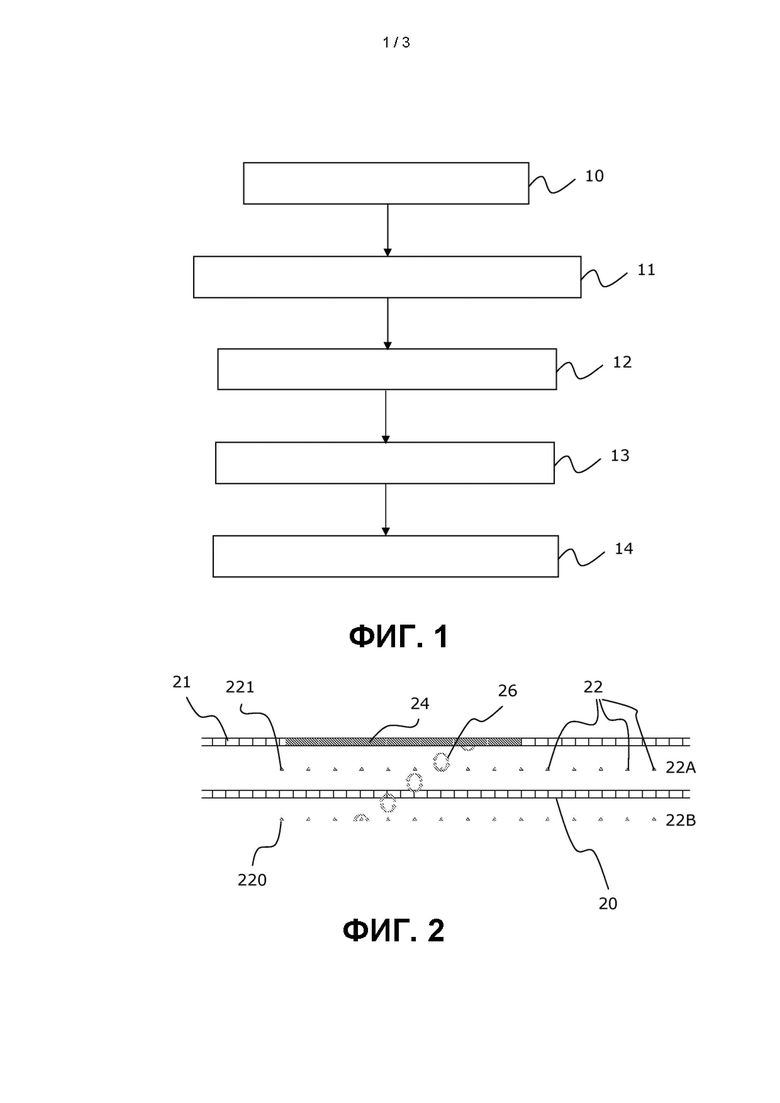
- на фигуре 1 представлена блок-схема с этапами процесса мониторинга недр под целевой зоной в соответствии с настоящим изобретением в конкретном варианте реализации;
- на фигуре 2 представлен схематический вид, иллюстрирующий конфигурацию для регистрации сейсмических волн в неограничивающем примере, где целевой областью выступает железнодорожный путь;
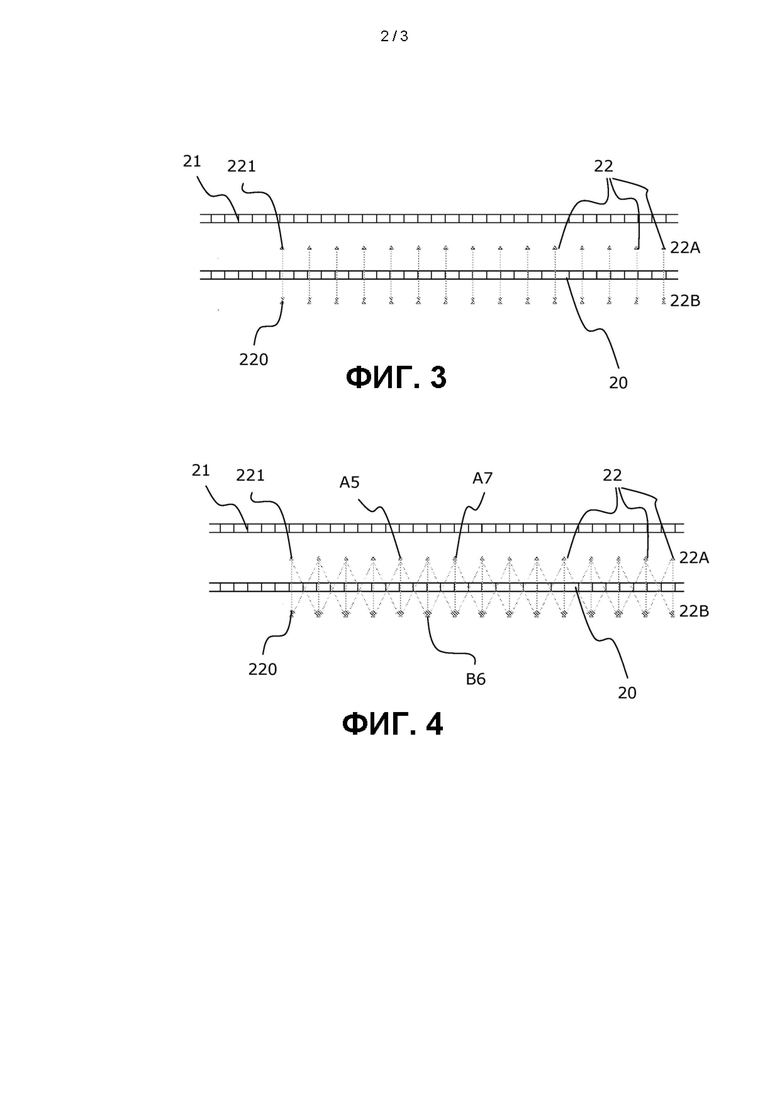
- на фигуре 3 представлена схема, иллюстрирующая конфигурацию для восстановления виртуальных путей распространения для примера на фиг. 2;
- на фигуре 4 представлена схема, иллюстрирующая конфигурацию для восстановления виртуальных путей распространения по множеству азимутов для примера на фиг. 2;
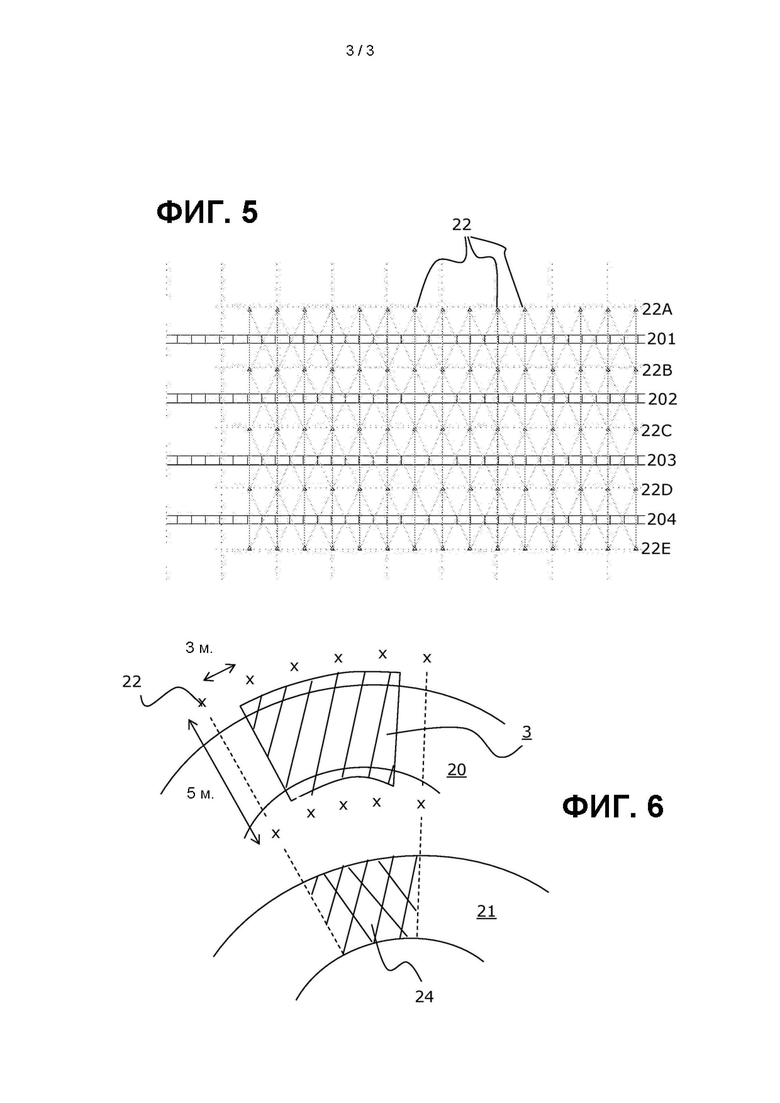
- на фигуре 5 представлена схема конфигурации для восстановления виртуальных путей распространения по множеству азимутов и с использованием множества железнодорожных путей; и
- на фигуре 6 представлена схема предпочтительного варианта реализации изобретения.
Как показано на блок-схеме на фигуре 1, во время первого этапа 10 процесса мониторинга недр под целевой зоной согласно изобретению по меньшей мере в течение определенного периода времени регистрируются сейсмические волны.
Данные сейсмические волны поступают от движущегося источника сейсмического шума, то есть от источника, находящегося в движении, и движение которого создает шум. Этот источник шума известен в том смысле, что он хорошо идентифицирован. Таким образом, речь идет не об окружающем шуме неидентифицированного происхождения.
Регистрация данных сейсмических волн производится с помощью пары датчиков, расположенных так, чтобы в течение указанного периода времени быть выровненными с источником шума.
Пары датчиков могут быть размещены разными способами, например, через равные интервалы по прямым линиям, как показано на фигуре 2, описанной ниже, но они также могут быть размещены нерегулярно и по любой кривой, или в узлах сетки регулярной или нерегулярной формы с ячейками квадратной, шестиугольной или иной формы. Также они могут размещаться случайным образом.
На фигуре 2 в качестве одного из неограничивающих примеров приводится конфигурация датчиков для регистрации в случае, если целевой зоной выступает железнодорожный путь 20. Вместе с тем изобретение так же хорошо применимо к целевой зоне, включающей обычную дорогу, здание или иную инфраструктуру (например, аэропорт).
Множество приемников сейсмических волн или датчиков 22 располагаются вдоль железнодорожного пути 20, называемого «целевым», по обе стороны от него. Эти датчики 22 образуют собой «Приемную линию А», 22А, и «Приемную линию В», 22 В. Датчики 22, например, могут включать хотя бы один геофон и/или акселерометр и/или датчик на основе оптоволоконного кабеля, например, типа DAS (Система распределенного акустического зондирования).
Вдоль целевого пути 20 датчики 22 могут быть распределены через равные интервалы (например, через несколько метров друг от друга). В частности, расстояние между датчиками 22 может составлять 2 метра.
Датчики 22 могут быть размещены на поверхности земли или слегка заглублены, а именно, располагаться на несколько метров под поверхностью. Они могут быть размещены на/под железнодорожной насыпью, на рельсах или под ними, а также в железнодорожном туннеле.
Множество датчиков 22 включает по меньшей мере одну пару датчиков 220, 221, расположенных напротив друг друга по обе стороны от железнодорожного полотна 20 и поперечно ему.
Мобильным источником сейсмического шума выступает поезд 24, движущийся по пути 21 - так называемому «пути-источнику», - отдельно от целевого пути 20. Шум, издаваемый движущимся поездом 24, на фигуре символизируется стрелками в форме кругов 26. Этот шум преимущественно возникает в результате соприкосновения колес поезда 24 с рельсами железнодорожного полотна 21.
Комплект, состоящий из множества датчиков 22, мобильного источника сейсмического шума 24 и модуля, пригодного для проведения обработки описанного здесь способа мониторинга недр, образует устройство мониторинга недр, соответствующее изобретению.
Если рассмотреть пару датчиков 220, 221, они будут находится с выравниванием с поездом 24 в течение периода времени, который начинается с момента, когда первое колесо поезда 24 оказывается на прямой, проходящей через барицентр датчиков 220 и 221, и заканчивается моментом, когда последнее колесо поезда 24 оказывается на прямой, проходящей через барицентр датчиков 220 и 221.
В соответствии с настоящим изобретением, в этот период времени датчики 220 и 221 регистрируют сейсмические волны, которые будут подвергнуты дальнейшей обработке способом, соответствующим изобретению. Этот период времени предопределен, поскольку известны кинематические параметры поезда 24, а именно, его положение и скорость в каждый момент. В этом смысле мобильный источник сейсмического шума, коим выступает поезд 24, является идентифицированным.
Этап записи 10 может быть ограничен данным периодом времени. В одном из вариантов регистрация также может проводиться непрерывно во времени.
Как показано на блок-схеме на фигуре 1, за этапом 10 регистрации сейсмических волн может следовать этап 11 предварительной обработки сейсмических волн, зарегистрированных датчиками 22.
Эта предварительная обработка может проводится различными способами и включает по меньшей мере стадию удаления шумов и стадию частотной фильтрации.
В одном из описанных примеров на стадии удаления шумов из записанных сейсмических волн удаляется базовый окружающий шум из сейсмического шума, производимого поездом 24. Этот базовый окружающий шум представляет собой электрический шум, связанный с контактной сетью, характеристики которого хорошо известны. В результате получается сигнал с улучшенным соотношением сигнал/шум.
Во время стадии частотной фильтрации сигнал фильтруется в определенном диапазоне частот, который соответствует предполагаемой полосе излучения поезда 24 и целевой полосе излучения, которая зависит от глубины зондирования недр под целевой областью, представленной железнодорожным полотном 20.
Кроме того, в промежутке между стадией удаления и стадией частотной фильтрации дополнительно может быть проведена операция спектрального отбеливания и/или операция бинаризации.
Операция спектрального отбеливания, также известная как спектральное выравнивание, заключается во взвешивании всех частотных компонентов сигнала таким образом, чтобы все они имели одинаковое энергетическое представление.
Операция бинаризации, также широко известная, заключается в присвоении -1 или+1 каждому мгновенному значению сигнала, чтобы упростить сигнал.
Могут применяться и другие виды предварительной обработки.
После этапа 10 (регистрации) и опционального этапа 11 (предварительной обработки сейсмических волн, зарегистрированных датчиками 22) следует этап 12 - восстановление сейсмограммы целевой зоны.
На этапе восстановления 12 метод интерферометрии применяется к зарегистрированным и, возможно, предварительно обработанным сейсмическим волнам.
Данный метод интерферометрии включает по меньшей мере одну операцию взаимной корреляции сигналов полученных на основе сейсмических волн, зарегистрированных датчиками 220 и 221 в течение определенного периода времени, в течение которого поезд 24 проходил по пути-источнику 21. Данный метод интерферометрии позволяет восстановить виртуальные пути распространения поперечных волн, в данном случае перпендикулярных целевому железнодорожному пути 20. Эти виртуальные пути распространения характеризуют сейсмограмму.
На фигуре 3 схематично показаны виртуальные пути распространения для каждой пары датчиков, расположенных по обе стороны от целевого железнодорожного пути 20.
В других вариантах реализации на этапе восстановления 12 может быть применен любой другой метод интерферометрии, например, метод, основанный на свертке, вместо упомянутой выше операции взаимной корреляции.
Как показано на фигуре 4, этап восстановления 12 может быть выполнен по разным направлениям. В самом деле, операции взаимной корреляции можно проводить не только между сигналами от сейсмических волн, записанных парами датчиков, расположенных напротив друг друга (как пара датчиков 220 и 221), но и парами датчиков, расположенных аналогично датчикам А5 и В6 или датчикам А7 и В6, то есть парами датчиков, для которых прямая, проходящая через барицентр двух датчиков, входящих в пару, образует ненулевой угол с перпендикуляром к целевому железнодорожному пути 20.
Более того, как показано на фигуре 5, этап восстановления 12 может проводится не только для различных направлений, но и с использованием множества железнодорожных путей с соответствующими парами датчиков. Путь-источник 21, параллельный путям 201-204, проходит рядом с «приемной линией 22А», как на фигурах 2-4, однако для простоты он не показан на фигуре 5.
Таким образом, прохождение поезда по пути-источнику 21 позволяет восстановить с помощью интерферометрии виртуальные пути распространения между линиями 22А и 22 В, и/или между линиями 22 В и 22С, и/или между линиями 22С и 22D, и/или между линиями 22D и 22E. Другими словами, для каждой пары соседних железнодорожных путей, каждый путь позволяет восстанавливать сейсмограмму зоны, расположенной под соседним путем с помощью пар датчиков, развернутых по обе стороны от этого соседнего пути.
Выше была описана процедура восстановления виртуальных поперечных путей распространения (то есть поперечных к железнодорожному пути) с использованием временного окна, в течение которого поезд 24 выровнен с парой датчиков 220, 221: пары датчиков позволяют изучать вариацию пути сейсмического шума.
В одном из вариантов реализации возможно использовать корреляцию путем свертки между двумя датчиками по обе стороны пути и сигналом, испускаемым поездом, движущимся по этому же пути. Таким образом, временные вариации времени распространения могут быть использованы для постоянного мониторинга в целях отслеживания возникновения аномалий.
Как показано на фигуре 1, за этапом восстановления 12 может опционально следовать этап суммирования 13 восстановленных сигналов от сейсмических волн, полученных от множества мобильных источников сейсмического шума 24.
В неограничивающем примере, описанном здесь, источником шума выступают поезда, множество поездов, передвигающиеся по пути в различные моменты времени, имеющие разную длину и скорость, и соответственно, выровненные с парами датчиков, аналогичными паре 220, 221 в различные периоды времени. Такие поезда будут давать сходные восстановленные сигналы.
Суммирование нескольких подобных сигналов позволяет улучшить отношение сигнал/шум и, таким образом, получить более качественное изображение недр под целевой зоной. Кроме того, это позволяет для датчиков типа пары 220, 221 воссоздавать виртуальные пути распространения однократно или с заданной периодичностью, например, ежедневно, еженедельно или ежемесячно.
Как показано на фигуре 1, после этапа восстановления 12 и опционального этапа суммирования 13 выполняется этап 14 построения изображения недр под целевой зоной на основе сейсмограммы, восстановленной ранее.
На этапе 14 построения изображения обработка зависит от типа сейсмических волн, зарегистрированных на этапе 10. На самом деле, можно регистрировать различные типы волн: поверхностные волны, преломленные волны, а также отраженные волны.
В одном из вариантов реализации, в котором на этапе 10 регистрируются поверхностные сейсмические волны, для получения изображения недр под целевой зоной выполняются следующие операции.
Прежде всего определяются кривые дисперсии поверхностных волн в воссозданных сигналах сейсмограммы в заданном диапазоне частот. В качестве неограничивающего примера, данный интервал частот может лежать в диапазоне от 1 до 100 Гц.
При необходимости далее можно выбрать только максимумы этих кривых дисперсии.
Затем на основе кривых дисперсии проводится томография скорости реконструированных сигналов.
Наконец, выполняется инверсия скоростей поверхностных волн восстановленных сигналов, полученных от поверхностных волн, с целью получения модели скоростей волн давления и сдвига, также известных как P- и S-волны.
Путем повторения этих операций во времени получают изображение недр под целевой зоной, которое меняется во времени, другими словами, получается четырехмерное представление данной области недр.
В другом варианте реализации, в котором на этапе 10 регистрируются преломленные сейсмические волны, для получения изображения недр под целевой зоной выполняются следующие операции.
Прежде всего определяется время поступления восстановленных сигналов сейсмограммы, соответствующих преломленным сейсмическим волнам.
Далее проводится томография восстановленных сигналов, соответствующих преломленным волнам типа P на основе вышеупомянутых моментов поступления сигналов с тем, чтобы получить модель скорости волн давления, также известных как P-волны.
Аналогично варианту реализации с регистрацией поверхностных сейсмических волн, повторение этих операций по времени позволяет получить меняющееся во времени изображение недр под целевой зоной - другими словами, четырехмерное изображение этой области недр.
В другом варианте реализации изобретения, на этапе 10 возможна регистрация отраженных сейсмических волн. Она позволяет получить картину отражательной способности недр под целевой зоной.
Разумеется, можно совместить регистрацию преломленных волн с регистрацией поверхностных волн, чтобы повысить разрешение, равно как и интегрировать обработку отраженных волн в данные процессы. В частности, сигналы обрабатываются независимо до пиков, которые затем объединяются, причем в роли пиков выступают кривые дисперсии для поверхностных волн и времена первого прибытия для преломленных волн.
В частности, предпочтительно и как показано на фигуре 6, изображение подземной целевой области 3 под железнодорожным путем 20 шириной порядка 1,5 м, лежащей на некотором расстоянии от параллельного пути-источника 21, может быть получено с помощью двух линий обычных датчиков типа акселерометров, отстоящих друг от друга на 5 м и охватывающих железнодорожный путь 20, расстояние между датчиками в каждой линии равно 3 м, датчики расположены в шахматном порядке для выравнивания разрешения трехмерного изображения, получаемого путем взаимной корреляции в масштабе колеи. Обработка поверхностных и преломленных волн позволяет достичь разрешения в 2 м или менее. Если требуется более высокое разрешение, можно провести сближение линий датчиков, например, разместив их прямо у рельсов, то есть на расстоянии около 1,5 м, и/или использовать два оптоволоконных кабеля для распределенного акустического зондирования, тем самым сократив расстояние между датчиками до порядка 60 см.
К способу, описанному в настоящем изобретении, можно также добавить метод восстановления, соответствующий предшествующему уровню техники, в котором группы датчиков позволяют анализировать кривые дисперсии сейсмических волн для дальнейшего повышения разрешения и/или точности изображения: а именно, восстанавливаются виртуальные продольные пути распространения, то есть параллельные железнодорожному пути, например, с использованием временных окон предопределенной продолжительности до и после прохождения поезда 24, соответственно, после того, как датчики начинают регистрировать сейсмические волны и до того, как датчики перестают регистрировать сейсмические волны.
Способ, соответствующий изобретению, предусматривает пассивный мониторинг недр под целевой зоной в том смысле, что он обрабатывает полученные сейсмические волны, но не производит их. Тем не менее, можно представить объединение датчиков, регистрирующих сейсмические волны, с активными сейсмическими источниками для применения способов обработки, описанных в документе US-A-2017 052269.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТРОЕНИЯ СЕЙСМИЧЕСКОГО ГЛУБИННОГО РАЗРЕЗА | 2009 |
|
RU2415449C1 |
| Способ контроля технического состояния обделки тоннеля с использованием сейсмоакустического метода | 2022 |
|
RU2791457C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПТИМИЗАЦИИ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ С ИСПОЛЬЗОВАНИЕМ СЖАТОГО ЗОНДИРОВАНИЯ | 2019 |
|
RU2786098C2 |
| СЕЙСМИЧЕСКАЯ РАЗВЕДКА | 2006 |
|
RU2396578C2 |
| СПОСОБ УСОВЕРШЕНСТВОВАНИЯ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ С ПРИМЕНЕНИЕМ СВЕРХЛЕГКИХ АКТИВНЫХ СИСТЕМ СЕЙСМИЧЕСКОГО КОНТРОЛЯ | 2017 |
|
RU2751573C2 |
| СЕЙСМИЧЕСКАЯ ОТРАЖАТЕЛЬНАЯ Q-ТОМОГРАФИЯ | 2013 |
|
RU2598907C1 |
| СПОСОБ ПОСТРОЕНИЯ СЕЙСМИЧЕСКОГО ГЛУБИННОГО И/ИЛИ ВРЕМЕННОГО РАЗРЕЗА "КОНГ-МАКРО" (ВАРИАНТЫ) | 2010 |
|
RU2445651C2 |
| Способ сейсморазведки | 1977 |
|
SU641371A1 |
| СПОСОБ СЕЙСМИЧЕСКОГО МОНИТОРИНГА ПРИ ПОМОЩИ КОМБИНИРОВАННОЙ СИСТЕМЫ НАБЛЮДЕНИЙ | 2024 |
|
RU2839553C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ БУРОВОГО ИНСТРУМЕНТА В ПРОЦЕССЕ БУРЕНИЯ | 2014 |
|
RU2572668C1 |
Настоящее изобретение в целом относится к области сейсмического анализа и, в частности, к наблюдению за недрами и обнаружению аномалий в последних, например, обнаружению полостей под железными дорогами, автомобильными дорогами, зданиями, а также аэропортами. Для мониторинга земных недр под целевой зоной (3) регистрируют сейсмические волны от идентифицированного мобильного источника шума (24) с помощью по меньшей мере одной пары датчиков (22), расположенных по обе стороны от целевой зоны (3), выбирают временные периоды, соответствующие выравниванию пары датчиков (22) с источником шума (24), с помощью интерферометрии восстанавливают сейсмограмму целевой зоны (3) на основе зарегистрированных сейсмических волн и выбранных временных периодов и генерируют изображение недр под целевой зоной (3) на основе сейсмограммы. Технический результат – повышение точности и информативности получаемых данных с построением изображения недр под целевой зоной. 2 н. и 17 з.п. ф-лы, 6 ил.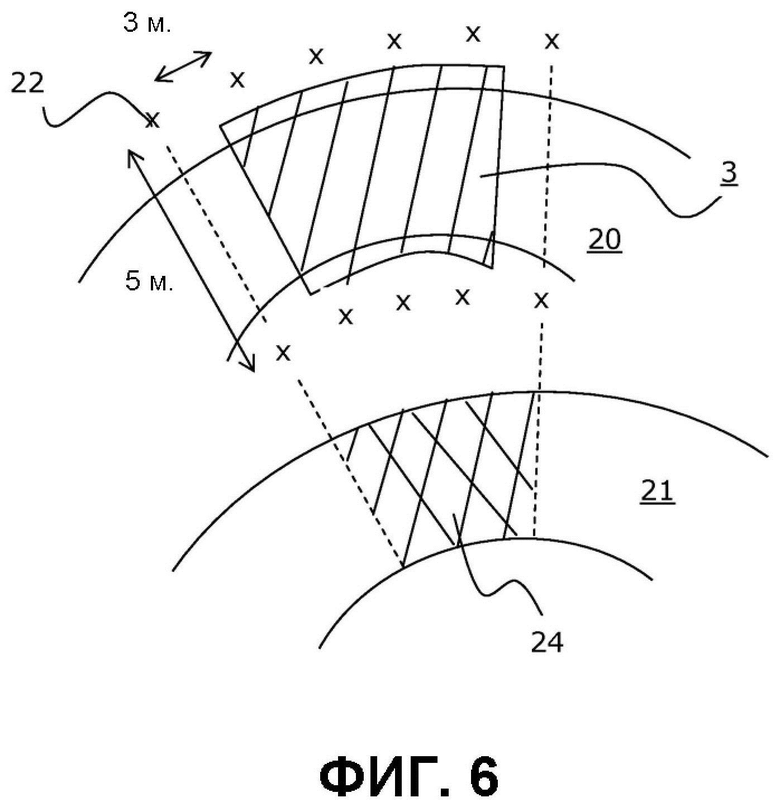
1. Способ наблюдения за недрами под целевой зоной, включающий следующие этапы, на которых:
регистрируют (10) сейсмические волны от идентифицированного и подвижного источника (24) сейсмического шума с помощью по меньшей мере одной пары (220, 221) датчиков (22), расположенных по обе стороны от указанной целевой зоны;
выбирают временные периоды, соответствующие выравниваниям пары (220, 221) датчиков (22) и указанного источника (24) шума;
восстанавливают (12) с помощью интерферометрии сейсмограмму целевой зоны на основе указанных зарегистрированных сейсмических волн и выбранных периодов времени и
генерируют (14) изображение недр под целевой зоной на основе указанной сейсмограммы.
2. Способ по п. 1, отличающийся тем, что источник (24) перемещают за пределы сегмента, образованного расположением указанной пары датчиков (220, 221).
3. Способ по п. 1 или 2, отличающийся тем, что он дополнительно включает до этапа восстановления (12) этап (11) предварительной обработки зарегистрированных сейсмических волн.
4. Способ по п. 3, отличающийся тем, что этап (11) предварительной обработки включает операции по удалению шумов и частотной фильтрации.
5. Способ по п. 3 или 4, отличающийся тем, что этап (11) предварительной обработки включает операцию спектрального отбеливания.
6. Способ по любому из предыдущих пунктов, отличающийся тем, что в ходе этапа (12) восстановления с помощью интерферометрии проводят по меньшей мере одну операцию взаимной корреляции сигналов, полученных от сейсмических волн, соответственно регистрируемых двумя датчиками из указанной пары датчиков (220, 221).
7. Способ по любому из предыдущих пунктов, отличающийся тем, что этап (10) регистрации выполняют непрерывно во времени.
8. Способ по любому из предыдущих пунктов, отличающийся тем, что он дополнительно включает после этапа (12) восстановления этап (13) суммирования восстановленных сигналов указанной сейсмограммы от множества мобильных источников шума, соответственно выровненных с вышеупомянутой парой (220, 221) датчиков в течение различных периодов времени.
9. Способ по любому из предыдущих пунктов, отличающийся тем, что на этапе (10) регистрации регистрируют поверхностные сейсмические волны.
10. Способ по п. 9, отличающийся тем, что на этапе (14) генерации указанного изображения:
определяют кривые дисперсии поверхностных волн в воссозданных сигналах указанной сейсмограммы в заданном диапазоне частот;
проводят томографию скорости вышеупомянутых сигналов, восстановленных на основе вышеупомянутых кривых дисперсии; и
проводят инверсию скоростей поверхностных волн вышеупомянутых восстановленных сигналов, с тем чтобы получить модель скорости Р- и S-волн.
11. Способ по любому из пп. 1-10, отличающийся тем, что на этапе (10) регистрации регистрируют преломленные сейсмические волны.
12. Способ по п. 11, отличающийся тем, что на этапе (14) генерации вышеупомянутого изображения:
определяют время поступления восстановленных сигналов упомянутой сейсмограммы, соответствующей упомянутым преломленным сейсмическим волнам; и
проводят томографию упомянутых восстановленных сигналов, соответствующих преломленным волнам типа Р на основе упомянутых моментов поступления сигналов, с тем чтобы получить модель скорости Р-волн.
13. Способ по любому из предыдущих пунктов, отличающийся тем, что на этапе (10) регистрации регистрируют отраженные сейсмические волны.
14. Способ по любому из предыдущих пунктов, отличающийся тем, что указанные датчики (22) включают по меньшей мере один геофон, и/или по меньшей мере один акселерометр, и/или по меньшей мере один датчик на основе использования оптических волокон.
15. Способ по любому из предыдущих пунктов, отличающийся тем, что указанные датчики (22), расположенные по обе стороны указанной целевой зоны, выстраивают по меньшей мере в две линии, или размещают в узлах сетки с ячейками квадратной или шестиугольной формы, и/или равномерно разносят.
16. Способ по любому из предыдущих пунктов, отличающийся тем, что указанная целевая зона представляет собой железную дорогу (20), дорогу или здание.
17. Способ по любому из предыдущих пунктов, отличающийся тем, что указанная целевая зона (3) является первым железнодорожным путем, а указанный источник (24) - это поезд, движущийся по второму железнодорожному пути (21), в значительной степени параллельному первому железнодорожному пути (20).
18. Способ по п. 17, отличающийся тем, что указанные датчики (22) равномерно располагают на двух параллельных линиях, окружающих первый железнодорожный путь (20).
19. Устройство мониторинга недр под целевой зоной, отличающееся тем, что оно содержит по меньшей мере одну пару (220, 221) датчиков (22), расположенных по обе стороны от указанной целевой зоны, подвижный источник (24) сейсмического шума и модуль, выполненный с возможностью осуществления операций обработки способа по любому из предыдущих пунктов.
| S.DOU et al., "DISTRIBUTED ACOUSTIC SENSING FOR SEISMIC MONITORING OF THE NEAR SURFACE: A TRAFFIC-NOISE INTERFEROMETRY CASE STUDY", SCIENTIFIC REPORTS, vol.7, no.1, 14.09.2017, pp.1-12 | |||
| D.A | |||
| QUIROS et al., "SEISMIC INTERFEROMETRY OF RAILROAD INDUCED GROUND MOTIONS: BODY AND SURFACE WAVE IMAGING", GEOPHYSICAL JORNAL INTERNATIONAL,vol.205, no.1, |

