Авиационный сайдстик (далее: устройство) - это устройство состоящее из корпуса, рукоятки с программируемыми кнопками и колесом прокрутки, неподвижного основания и механизма находящейся под неподвижным основанием. Устройство может применяться для управления различной пилотируемой и беспилотной техникой, в т.ч., летающей, наземной, подводной, для управления космическими аппаратами в космическом пространстве. Помимо этого, устройство может применяться для управления в компьютерных играх.
Устройство выполняет аналогичные функции как у известной конструкции джойстика, например как описано в патенте US4870389 A, а также как у известных конструкций сайдстиков, описанных в патентах: US5149023 A, GB2484830 A, US9051836 B2, US9056675 B2, US9067672 B2, US9405312 B2.
Все эти устройства объединяют несколько недостатков, которые затрудняют контроль при их использовании - это большое расстояние между рукояткой и осью вращения, как в патенте US5149023 A, или недостаточное количество степеней свободы как в патенте US9051836 B2.
Наиболее близким аналогом является патент RU2730081, но у этой конструкции есть проблема с кривизной опорного полусферического основания. Это может выражаться в трудности масштабирования конструкции. То есть, чем меньше размер полусферического основания, тем больше его кривизна, что может затруднить его использование. Но с другой стороны, чем будет большим полусферическое основание, тем большим должен быть кронштейн, соединяющий рукоятку и сферу. Это также может затруднить использование устройства.
Представляемая конструкция авиационного сайдстика лишена этих недостатков. Это представлено фигурами:
Фигура 1,
представлено схематичное изображение устройства в разрезе, где: 1 - рукоятка с программируемыми клавишами и колесом прокрутки (клавиши и колесо прокрутки на фигурах не обозначены, далее: рукоятка), 2 - главный кронштейн, 3 - печатная плата с электронными компонентами (далее: плата) и 15 оптическим сенсором, 4 - сфера, 5 - шаговый двигатель, 6 - втулка с резьбой, 7 - соленоиды с шаровыми подшипниками (далее: соленоиды), 8 - внешний цилиндр, 9 - внутренний цилиндр, 10 - нижний кронштейн, 11 - корпус устройства (далее: корпус), 12 - сегмент сферы, 13 - сектор подвижности кронштейна, 14 - зазор, 15 - оптический сенсор, 16 - винт, 21 - сердечник соленоида, 22 - окно для соленоида, 31 перегородка, 33 - окно главного кронштейна (далее: окно), 34 - фокус сегмента сферы, 35 - общая воображаемая ось сферы и сегмента сферы (далее: ось), 36 - средний кронштейн, 37 - планка.
Пояснение: центр сферы на фигурах не обозначен и надо учитывать, что подразумевается геометрический центр сферы 4.
Пояснение: фокус сегмента сферы 34 - это центр воображаемой сферы часть которой используется для создания фигуры "сегмент сферы".
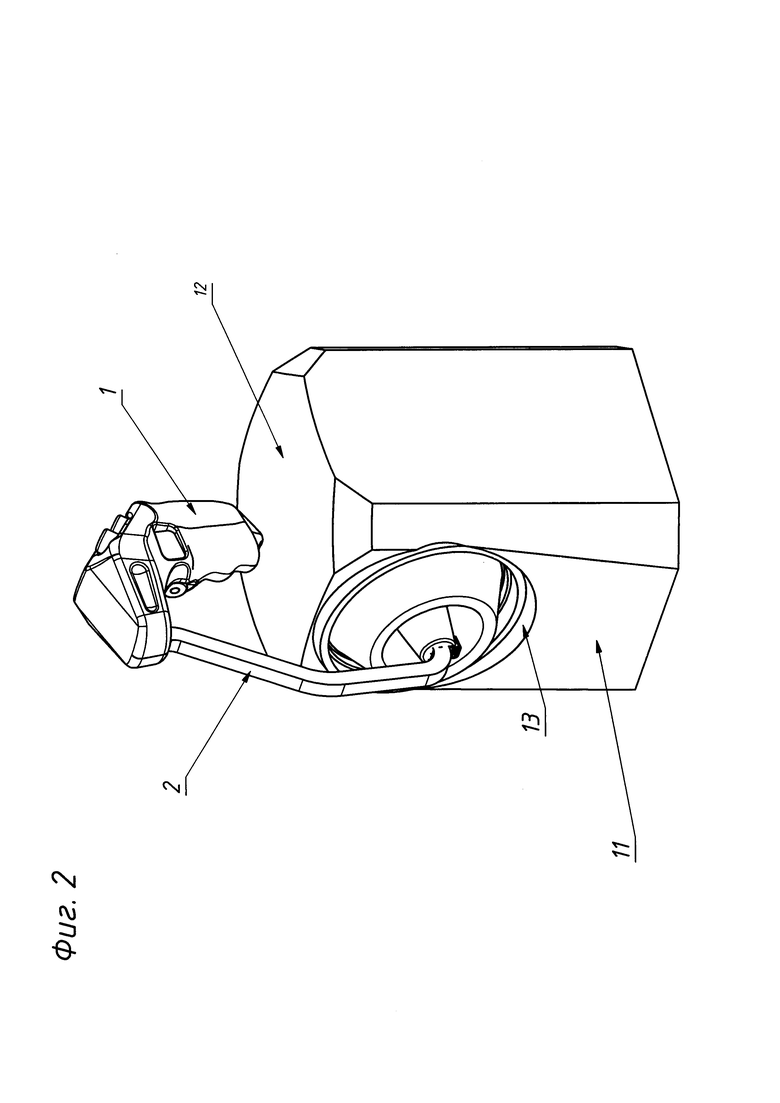
Фигура 2, где показан внешний вид устройства:
1 - рукоятка, 2 - главный кронштейн, 11 - корпус, 12 - сегмент сферы, 13 - сектор подвижности кронштейна.
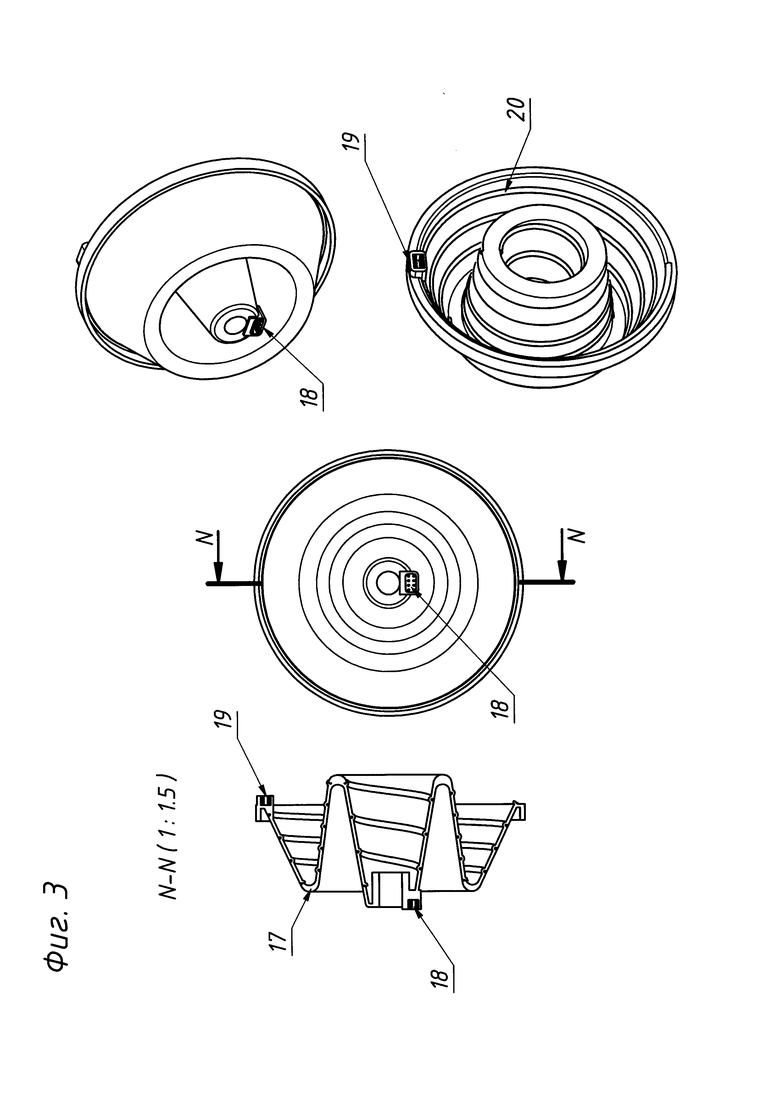
Фигура 3, где
17 - гофрированная конструкция, 18 - первый электрический разъем, 19 - второй электрический разъем, 20 - электрические провода (далее: провода). На фигурах 4, 5 и 6 показаны варианты конструкции компенсирующего механизма для регулирования зазора 14:
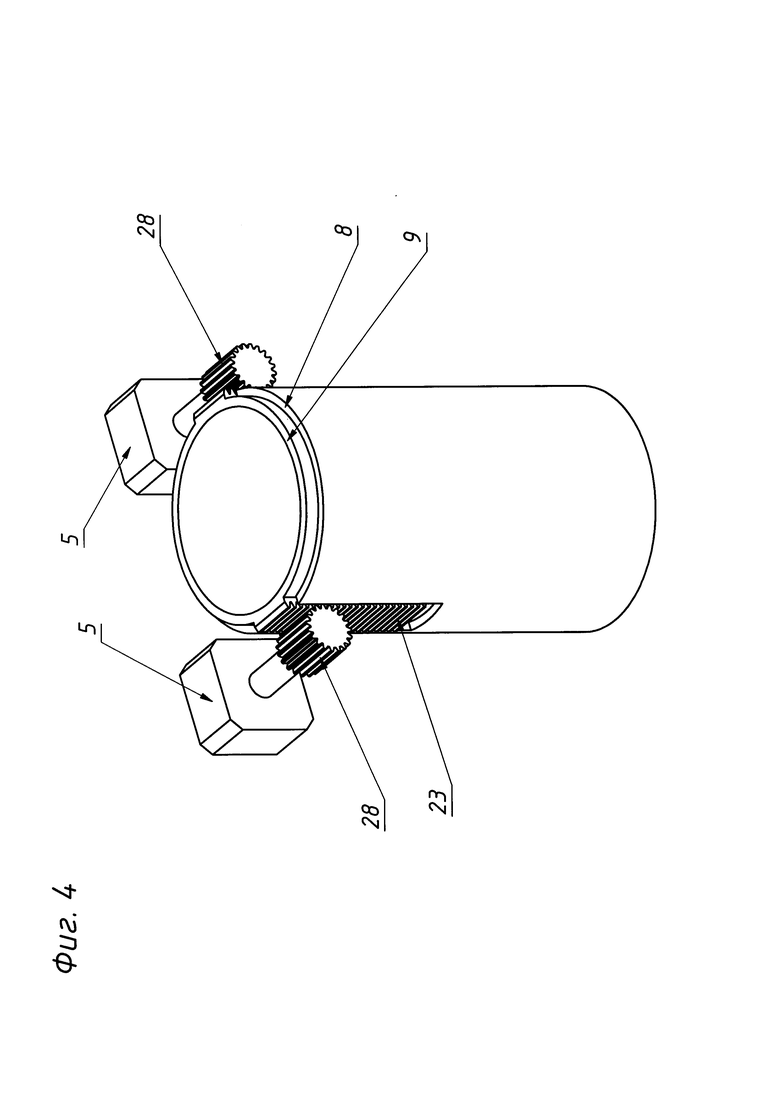
Фигура 4, где
5 - шаговый двигатель, 28 - прямозубая шестерня, 23 - зубчатая планка, 9 - внутренний цилиндр, 8 - внешний цилиндр. Пояснение: могут использоваться как прямозубые, так и косозубые шестерни.
Фигура 5, где
8 - внешний цилиндр, 9 - внутренний цилиндр, 24 - червячный вал, 25 - направляющая канавка, 30 - резьбовое кольцо, 32 - направляющий выступ.
Фигура 6, где
5 - шаговый двигатель, 6 - втулка резьбой, 26 - большая шестерня, 9 -внутренний цилиндр, 8 - внешний цилиндр, 29 - малая шестерня, 27 - винт шестерни.
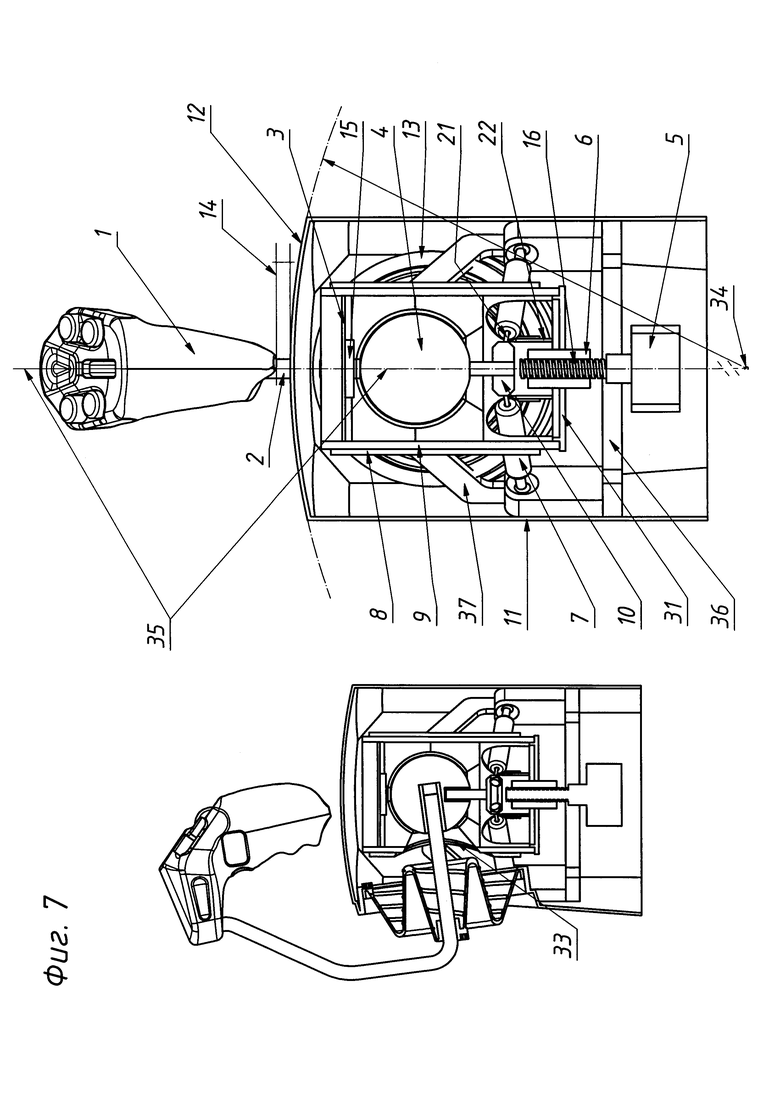
Фигура 7,
где также представлен разрез устройства, где 1 - рукоятка с программируемыми клавишами и колесом прокрутки (клавиши и колесо прокрутки на фигурах не обозначены, далее: рукоятка), 2 - главный кронштейн, 3 - печатная плата с электронными компонентами (далее: плата) и 15 оптическим сенсором, 4 - сфера, 5 - шаговый двигатель, 6 - втулка с резьбой, 7 - соленоиды с шаровыми подшипниками (далее: соленоиды), 8 - внешний цилиндр, 9 - внутренний цилиндр, 10 -нижний кронштейн, 11 - корпус устройства (далее: корпус), 12 - сегмент сферы, 13 - сектор подвижности кронштейна, 14 - зазор, 15 - оптический сенсор, 16 - винт, 21 - сердечник соленоида, 22 - окно для соленоида, 31 перегородка, 33 - окно главного кронштейна (далее: окно), 34 - фокус сегмента сферы, 35 - общая воображаемая ось сферы и сегмента сферы (далее: ось), 36 - средний кронштейн, 37 - планка.
Устройство (Фигура 1 и Фигура 7) состоит из корпуса 11, рукоятки 1, главного кронштейна 2, который может состоять из двух частей, верхней и нижней (на фигурах не обозначены) и компенсирующего механизма, расположенного внутри корпуса 11, осуществляющего автоматическую подстройку зазора 14, состоящего из шагового двигателя 5, винта 16 и втулки с резьбой 6, служащих для возможности регулирования зазора 14, за счет перемещения вверх или вниз внутреннего цилиндра 9, а также находящихся внутри него платы 3 с установленным на ней оптическим сенсором 15, сферы 4, в которой закреплен нижний конец главного кронштейна 2 и нижний кронштейн 10, в котором, с использованием шарового шарнира закреплены сердечники соленоидов 21. Также в конструкции имеются винт 16, втулка с резьбой 6, соленоиды 7 закрепленные шаровым шарниром на среднем кронштейне 36. Также на фигуре 1 обозначен зазор 14 между сегментом сферы 12 и рукояткой 1, размер которого может меняться и составлять от 4, до 15 мм, в зависимости от размера руки пользователя. Также показаны другие элементы конструкции - сектор подвижности кронштейна 13 в виде выреза в сегменте сферы 12 и в корпусе 1, внешний цилиндр 8, жестко соединенный с корпусом 1 в котором установлен подвижный внутренний цилиндр 9 имеющий жесткое крепление с средним кронштейном 36 при помощи планок 37. Кроме того, при соединении с помощью проводов проложенных от кнопок (на фигурах не обозначены) рукоятке 1 к плате 3, может применяться гофрированная конструкция 17 (фигура 3), в раструбы которой встроены электрические разъемы: первый электрический разъем 18 и второй электрический разъем 19, которые соединяются между собой проводами 20, проложенными в теле материала из которого изготовлена гофрированная конструкция. Причем, на каждом раструбе может быть по несколько электрических разъемов или окружность каждого раструба может представлять из себя сплошной разъем. Т.е., провода выходящие из рукоятки 1 заканчиваются разъемом (не показано), который подключается к первому электрическому разъему 18 расположенному на раструбе гофрированной конструкции 17, а второй электрический разъем 19 подключается к разъему установленному на корпусе 11 (не показано). Таким образом осуществляется надежный контакт между разными участками электрической цепи через гибкую гофрированную конструкцию.
На фигурах 4, 5 и 6 изображены примеры возможных вариантов механизма перемещения внутреннего цилиндра 9 с помощью которого осуществляется регулировка зазора 14. Так на фигуре 4, показан пример механизма с зубчатыми рейками 23 установленными по бокам внутреннего цилиндра 9, в вырезах внешнего цилиндра 8 (не обозначено), с которыми производится зацепление прямозубых шестерен 28 приводящимися во вращение от шагового двигателя 5. Таким образом осуществляется перемещение внутреннего цилиндра 9 вверх или вниз. На фигуре 5 показан механизм перемещения внутреннего цилиндра 9 при помощи червячного вала 24, который вращает резьбовое кольцо 30, встроенное между внешним цилиндром 8 и внутренним цилиндром 9, имеющее с ним резьбовое зацепление. При этом внутренний цилиндр 9 не проворачивается за счет направляющих канавок 25 и направляющих выступов 32.
На фигуре 6 показан механизм для перемещения внутреннего цилиндра 9 относительно внешнего цилиндра 8 при помощи большой шестерни 26, малой шестерни 29, шагового двигателя 5, винта 16 и втулки 6. В этом варианте механизма могут быть применены как прямозубые так и косозубые шестерни.
Авиационный сайдстика может быть изготовлен как для левой, так и для правой руки пользователя. В данном описании представлен вариант устройства для правой руки.
В отличии от конструкции представленной в патенте RU2730081, представляемая конструкция авиационного сайдстика имеет значительные отличия и лишена ее недостатков, а именно: в представленной конструкции авиационного сайдстика регулирование зазора между рукояткой и сегментом сферы 12 может производиться как с помощью главного кронштейна 2 оборудованного для осуществления такой возможности собственным винтом и шаговым двигателем, так и компенсирующим механизмом, установленным в корпусе устройства, но в описании представленной заявки на изобретение и на фигурах показана конструкция авиационного сайдстика, в которой регулирование зазора 14 осуществляется только компенсирующим механизмом. Еще одно отличие состоит в возможности применения в конструкции сегмента сферы 12 большего радиуса, без обязательного совмещения его фокуса сегмента сферы 34 и центра сферы 4 установленной в цилиндре 9 (в отличии от решения приведенного в патенте RU2730081, где центры сферы и полусферического основания обязаны совпадать), с сохранением вертикальной соосности центра сферы 4 и фокуса сегмента сферы 34. Пояснение: полусферическое основание-это термин из приведенного в качестве аналога патента RU2730081. Применение сегмента сферы 12 большого радиуса позволяет сделать ее поверхность предназначенную для опоры руки пользователя удерживающего рукоятку 1 более ровной, что в значительной степени повышает возможности устройства в точности управления различным оборудованием при его использовании.
Авиационный сайдстик, работает следующим образом: пользователь подключает устройство к электрическому питанию и после этого вычислительное устройство руководствуясь заложенной программой посылает электронные сигналы шаговому двигателю компенсирующего механизма и соленоидам механизма обратной связи которые устанавливают рукоятку 1 на нужную высоту над сегментом сферы 12 в положении начала координат, которое может находиться в центре сегмента сферы 12 или в ином ее месте, в зависимости от установленных настроек. После чего, пользователь рукой удерживая рукоятку 1 ребром согнутой ладони касается сегмента сферы 12 изготовленного из скользкого материала, причем, скольжение ребра ладони пользователя при перемещении рукоятки 1 осуществляется благодаря зазору 14, который на любом участке сегмента сферы 12 должен оставаться неизменным. При этом главный кронштейн 2 соединяет рукоятку 1 и сферу 4 расположенную во внутреннем цилиндре 9 благодаря наличию окна 33.
Причем, центр сферы 4 и фокус сегмента сферы 34, а также их радиусы не совпадают и располагаются на одной оси 35, но при этом пользователь, ребро ладони которого при перемещении рукоятки касается сегмента сферы 12, не ощущает никакого дискомфорта из-за уменьшения или увеличения зазора 14. Получить такой результат позволяет компенсирующий механизм расположенный внутри корпуса 11.
Компенсирующий механизм работает следующим образом: в корпусе 11 жестко закреплен внешний цилиндр 8, внутри которого размещен внутренний цилиндр 9, содержащий сферу 4, нижний кронштейн 10 и плату 3 с оптическим сенсором 15. Внутренний цилиндр 9 находится с внешним цилиндром 8 в скользящем соприкосновении и имеют между собой направляющие канавки 25 и направляющие выступы 32, предохраняющие внутренний цилиндр 9 от проворота. Внутренний цилиндр 9 с нижней стороны имеет перегородку 31 на которой установлена втулка с резьбой 6, имеющая резьбовое соединение с винтом 16 шагового двигателя 5. При перемещении рукоятки 1, оптический сенсор 15, расположенный на плате 3, получает информацию с поверхности сферы 4 и передает ее на плату 3, где располагается вычислительный блок, который в соответствии с программным алгоритмом определяет угол, скорость и направление поворота сферы 4 относительно оптического сенсора 15. Вычислительный блок, на основании полученных данных и установленному программному обеспечению отправляет сигналы на шаговый двигатель 5 который вращая винт 16 передвигает внутренний цилиндр 9 вверх или вниз вместе с находящимися в нем элементами конструкции с закрепленным на нем при помощи планок 37 средним кронштейном 36, тем самым внося поправки в меняющийся зазор 14 между рукояткой 1 и сегментом сферы 12. Уточнение: при перемещении рукоятки 1, при неработающем компенсирующем механизме зазор 14 будет меняться, т.к., центр сферы 4 и фокус сегмента сферы 34 не совпадают. Ниже сферы 4 расположены соленоиды 7 и сердечники соленоидов 21, служащие для осуществления имитации обратной связи сайдстика с управляющими поверхностями летательного аппарата, на которые вычислительное устройство летательного аппарата (не показано) подает электрическое напряжение изменяемое им в зависимости от программного обеспечения и условий полета. То есть, компенсирующий механизм, за счет жестко закрепленных на внутреннем цилиндре 9 также несет на себе почти весь механизм осуществления имитации обратной связи включая соленоиды 7, планки 37, средний кронштейн 36. Сердечники соленоидов 21 соединены со сферой 4 через нижний кронштейн 10, имеющие с ним шаровое соединение. Сердечники соленоидов установлены в соленоидах 7, которые также имеют шаровое соединение с средним кронштейном 36. Для работы соленоидов 7 во внутреннем цилиндре 9 имеются окна для соленоидов 22. Таким образом, плата 3, оптический сенсор 15, сфера 4, соленоиды 7, сердечники соленоидов 21, внутренний цилиндр 9 и прикрепленный к нему средний кронштейн 36 - все это элементы подвижного компенсирующего механизма. Однако, возможен вариант конструкции компенсирующего механизма в котором отсутствует планки 37 и средний кронштейн 36, а соленоиды 7 имеют шаровое шарнирное соединение с статичным корпусом 11. Этот вариант возможен при применении программного обеспечения которое будет способно учитывать работу соленоидов без привязки к системе координат компенсирующего механизма, где при перемещении компенсирующего механизма вверх или вниз каждый из соленоидов 7 будет работать в собственной системе координат. Этот принцип также может применяться для регулирования зазора 14 в конструкции авиационного сайдстика когда центр сферы 4 и фокус сегмента сферы 34 совпадают (как в патенте №2730081). При этом варианте, перед началом использования сайдстика пользователь сам может регулировать зазор 14, например: с помощью вращения потенциометра, либо перед началом использования сайдстика пользователь подключает к нему флеш карту с содержащейся на ней информацией о размере руки пользователя, которая была сохранена им ранее при настройке устройства. Информация с флешкарты передается на вычислительный блок и после этого устройство само на основании полученных данных и при помощи шагового двигателя компенсирующего механизма устанавливает нужные параметры перемещая внутреннего цилиндр 9 вверх или вниз.
Для уменьшения высоты устройства возможен механизм (Фигура 4) перемещения внутреннего цилиндра 9 для регулировки зазора 14 при помощи шаговых двигателей установленных в окнах (не показаны) внешнего цилиндра 8 и зубчатых реек 23, имеющих жесткое соединение с внутренним цилиндром 9, а также шаговых двигателях приводящих во вращение прямозубые шестерни 28.
Помимо этого возможен способ (Фигура 5) перемещения внутреннего цилиндра 9 вверх или вниз, для регулирования зазора 14 при помощи резьбового кольца 30 имеющее винтовое соединение с внутренним цилиндром 9 и нарезы (не обозначены) с внешней стороны для зацепления с червячным валом 24 приводимым в движение шаговым двигателем 5. При вращении червячного вала 24, через винтовое соединение приводится в движение резьбовое кольцо 30, которое при помощи винтового соединения с внутренним цилиндром 9 двигает его вверх или вниз в зависимости от того в какую сторону вращается червячный вал 24.
Также возможен механизм (Фигура 6) перемещения внутреннего цилиндра 9 для регулирования зазора 14, где шаговый двигатель 5, через малую шестерню 29 вращает большую шестерню 26, установленную ниже цилиндра 9, имеющую с ним соединение при помощи втулки с резьбой 6 и винта шестерни 27. В этом варианте механизма, а также вариантах показанных на фигуре 5 и фигуре 6, конструкция авиационного сайдстика может включать в себя несколько шаговых двигателей. Также в этом варианте вместо большой шестерни 29, может применяться коническая шестерня (на фигурах не показана) кинематически соединенная под углом с другой конической шестерней приводимой от шагового двигателя. Помимо этого, в приводе компенсирующего механизма, для регулирования зазора 14, вместо шестерен может быть применены зубчатые ремни и зубчатые шкивы (на фигурах не показаны).
Таким образом существует несколько способов регулирования зазора 14 при несовпадении центра сферы 4 и фокуса сегмента сферы 34 устройства.
На фигурах представлен вариант авиационного сайдстика с передним к расположенным главного кронштейна 2, но помимо этого варианта также возможно размещение главного кронштейна с правой или с левой стороны рукоятки устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления | 2020 |
|
RU2730081C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2013 |
|
RU2551718C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2014 |
|
RU2578241C2 |
| УСТРОЙСТВО ВВОДА КООРДИНАТ | 2016 |
|
RU2669084C2 |
| УСТРОЙСТВО ВВОДА КООРДИНАТ | 2017 |
|
RU2669093C2 |
| РОТОРНО-ТУРБИННЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2002 |
|
RU2289698C2 |
| ИГРОВОЙ КОНТРОЛЛЕР | 2016 |
|
RU2658139C1 |
| ИГРОВОЙ КОНТРОЛЛЕР | 2015 |
|
RU2611989C2 |
| Основа сегментированного матраса | 2023 |
|
RU2829094C1 |
| Сегментированный матрас | 2022 |
|
RU2793225C1 |



Изобретение относится к устройствам управления различной пилотируемой и беспилотной техникой. Авиационный сайдстик содержит корпус, рукоятку с программируемыми кнопками и колесом прокрутки, регулируемый по высоте кронштейн, сферу, вычислительное устройство, оптический сенсор и неподвижный сегмент сферы, изготовленный из скользкого материала, а также механизм, осуществляющий имитацию обратной связи, находящийся под основанием. При этом центр сферы, фокус сегмента сферы и радиусы сфер не совпадают. Внутри корпуса расположен компенсирующий механизм, состоящий из неподвижного внешнего цилиндра и подвижного внутреннего цилиндра, винта и втулки с резьбой, шагового двигателя. При этом авиационный сайдстик содержит гофрированную конструкцию с размещенными на ее раструбах электрическими разъемами, соединенными между собой электрическими проводами, проложенными в теле ее материала. Средний кронштейн механизма имитации обратной связи жестко соединен с компенсирующим механизмом. Достигается возможность регулирования высоты устройства. 7 ил.
Авиационный сайдстик, содержащий корпус, рукоятку с программируемыми кнопками и колесом прокрутки, регулируемый по высоте кронштейн, сферу, вычислительное устройство, оптический сенсор и неподвижный сегмент сферы, изготовленный из скользкого материала, а также механизм, осуществляющий имитацию обратной связи, находящийся под основанием, отличающийся тем, что центр сферы, фокус сегмента сферы и радиусы сфер не совпадают и расположены на общей воображаемой оси, внутри корпуса расположен компенсирующий механизм, состоящий из неподвижного внешнего цилиндра и подвижного внутреннего цилиндра, винта и втулки с резьбой, шагового двигателя, а также шестерен и зубчатых реек, или червячного вала и поворотного резьбового кольца, или шестерни и малой шестерни, или зубчатых шкивов и зубчатых ремней, при этом авиационный сайдстик содержит гофрированную конструкцию с размещенными на ее раструбах электрическими разъемами, соединенными между собой электрическими проводами, проложенными в теле ее материала, а средний кронштейн механизма обратной связи жестко соединен с компенсирующим механизмом.
| Устройство для управления | 2020 |
|
RU2730081C1 |
| Установочное устройство для позиционирования конструктивного элемента | 2012 |
|
RU2606657C2 |
| JP 58105316 А, 23.06.1983 | |||
| US 20100057307 А1, 04.03.2010. | |||

