Игровой контроллер предназначен для использования в качестве устройства ввода информации и управления ЭВМ и игровыми консолями. Помимо этого может применяться для управления беспилотной техникой (строительной, военной, летательной и плавающей).
Известны многочисленные конструкции игровых манипуляторов (геймпадов и джойстиков), на конструкции которых были выданы патенты, например: «Mobile telephone gamepad controller» US D544481 S1, «Universal mobile gaming docking station and controller» US 7580728 B2, «Game controller with multi-positional state controller element» US D658179 S1, «Controller for video game console» US 8641525 B2, «Operating device for game machine» US 7377851 B2, «Game controller» US D659140 S1.
Однако, как показывает практика, все они обладают значительными недостатками. В частности, недостаточной точностью управления курсора, которая вынуждает разработчиков компьютерных игр для игровых консолей идти на значительное упрощение игрового процесса и снижение напряженности сюжетов в компьютерных играх, т.к. при разработке игр для консолей, в основном ориентируются на использование геймпадов и джойстиков, оснащенных аналоговыми стиками и тачпадами (сенсорными поверхностями), ограниченными двумя степенями свободы, которые рассчитаны на управление пальцами рук, не обладающими достаточной координацией, в сравнении с кистью руки.
В отличие от аналоговых стиков, которые применяются преимущественно на игровых консолях, игры, выпускаемые для персональных компьютеров, в основном предполагают использование клавиатуры (патенты: «Computer keyboard layout» US 5584588 A, «Computer keyboard» WO 2005067597 A2 и компьютерной мыши (патенты: «Computer mouse» US 20120262375 A1, «lntelligent boundless computer mouse system» US 6295051 B1), которая обладает значительно более высокой точностью наведения курсора по сравнению с аналоговым стиком, т.к. управляется всей рукой. Этим обстоятельством обусловлено почти полное отсутствие на игровых консолях, совместимых с джойстиками и геймпадами, некоторых жанров игр, например стратегии в реальном времени.
Предлагаемый игровой контроллер лишен всех вышеперечисленных недостатков, присущих всевозможным геймпадам и джойстикам, т.к. является гибридом геймпада, клавиатуры и компьютерной мыши, который представлен на чертежах:
Фигура-1, общий вид игрового контроллера, где 1 - корпус, 2 - манипулятор R-Handle (вращающаяся рукоятка) – устройство, заменяющее компьютерную мышь, 3 - набор программируемых клавиш, 4 - устройство для фиксации игрового контроллера на руке пользователя (может быть съемной и иметь дополнительные приспособления для фиксации на руке), 5 - стандартная компьютерная клавиатура, 6 - программируемая клавиша, 23 - рукоятка игрового контроллера.
Фигура-2, общий вид игрового контроллера.
Фигура-3, общий вид игрового контроллера.
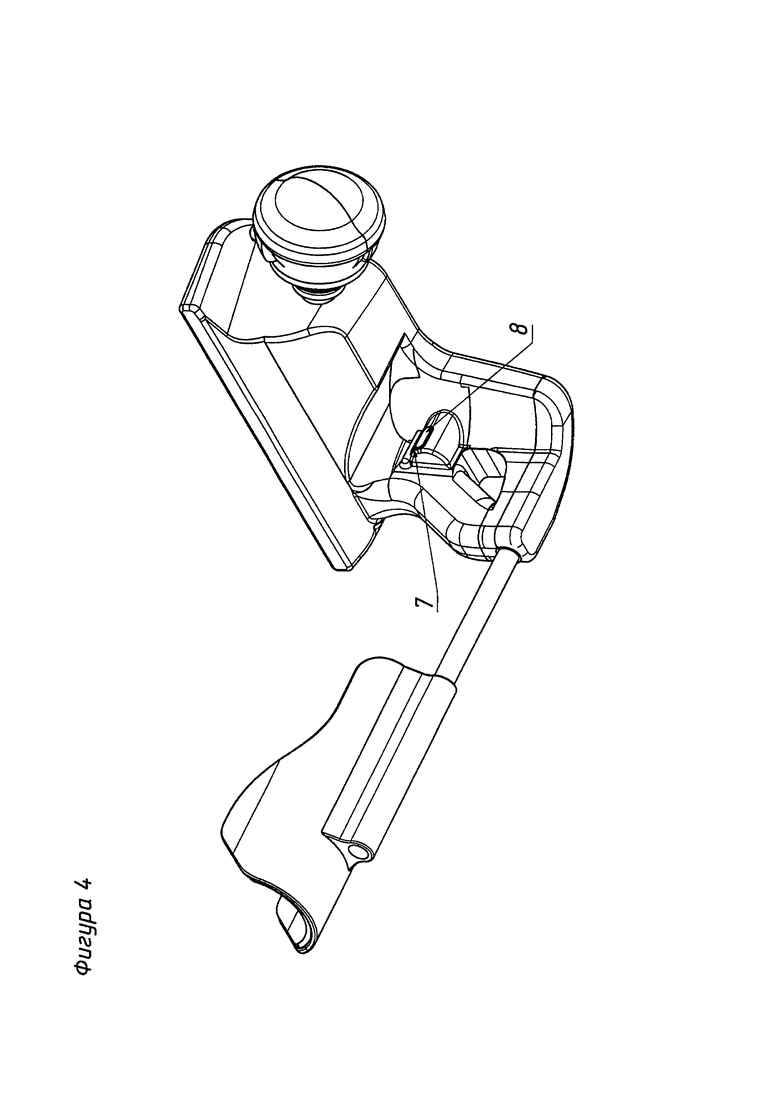
Фигура-4, общий вид игрового контроллера, где 7 и 8 - программируемые клавиши.
Фигура-5, общий вид игрового контроллера.
Фигура-6, общий вид игрового манипулятора R-Handle, где 9 - соединительный шток, 10 - гибкий гофрированный кожух для защиты от пыли, 11 - 12 -13 - программируемые клавиши, 14 - ролик горизонтальной прокрутки, совмещенный с программируемой клавишей.
Фигура-7, где представлен манипулятор R-Handle в разрезе, где 9 - соединительный шток, 15 - внутренняя шарообразная опора, 16 - оболочка шарообразной опоры, внутренняя поверхность которой используется для функционирования оптического датчика, 17 - внешняя часть оболочки шарообразной опоры, 18 - оптический датчик, 19 - фокусирующая линза, 20 - светодиод подсветки поверхности для оптического датчика, 21 - внешние индукционные катушки, 22 - внутренняя индукционная катушка.
Фигура-8, где представлена другая конструкция манипулятора R-Handle в разрезе, где 18 - оптический датчик, 19 - фокусирующая линза, 20 - светодиод для подсветки поверхности для оптического датчика, 22 - внутренняя индукционная катушка, 24 - внутренняя полусфера, являющаяся поверхностью для функционирования оптического датчика.
Фигура-9, где представлена другая конструкция манипулятора R-Handle в разрезе, где 15 - внутренняя шарообразная опора, наружная поверхность которой используется для функционирования оптического датчика, 16 - оболочка шарообразной опоры, 17 - внешняя часть оболочки шарообразной опоры, 18 - оптический датчик, 19 - фокусирующая линза, 20 - светодиод подсветки поверхности шарообразной опоры для работы оптического датчика, 21 - внешние индукционные катушки, 22 - внутренняя индукционная катушка.
Фигура-10, где представлена конструкция манипулятора R-Handle, где 18 - оптический датчик, 20 - светодиод подсветки, 25 - клавиша отключения светодиода, 26- гибкий электропроводящий гофрированный кожух, трансформатор с подвижной вторичной обмоткой 27.
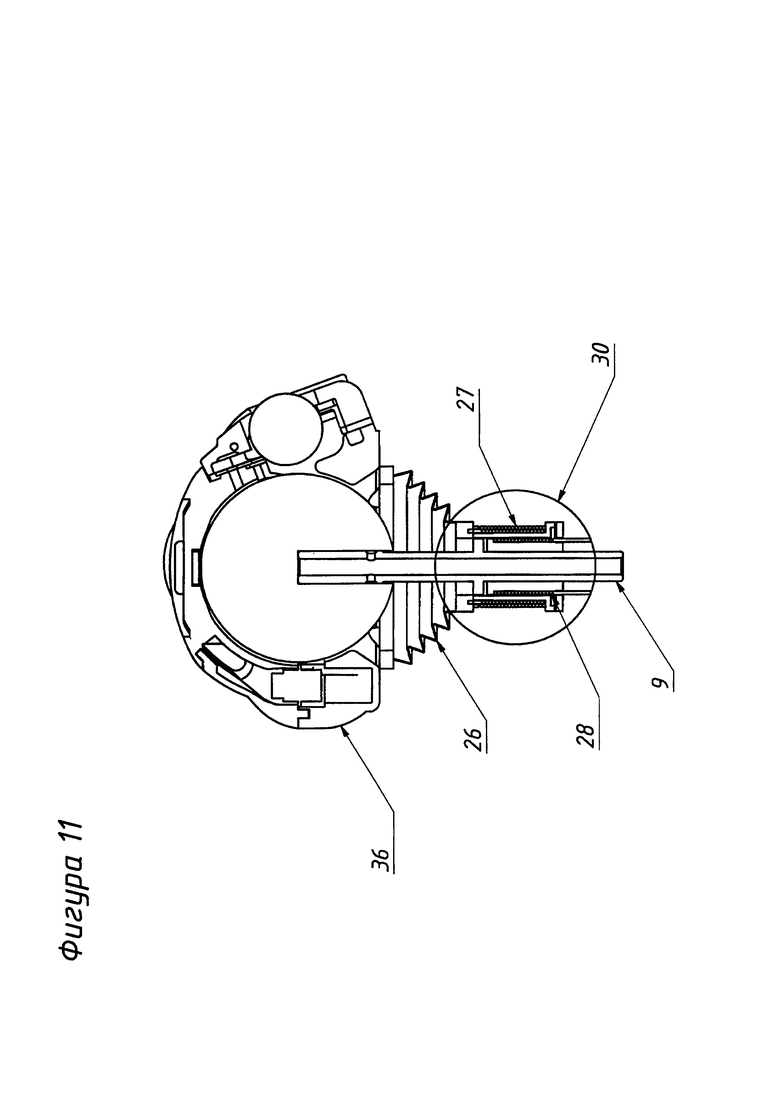
Фигура-11, здесь представлен манипулятор R-Handle в разрезе, где показано устройство трансформатора 30 с подвижной вторичной обмоткой 27, где его внутренняя обмотка 28 жестко закреплена на соединительном штоке 9, а ее выводы соединены с электрической схемой внутри корпуса игрового контроллера (не показана). Вторичная обмотка трансформатора является подвижной и может вращаться вместе с гибким электропроводящим кожухом 26 и оболочкой шарообразной опоры 16 в плоскости первичной обмотки. Выводы проводов вторичной обмотки трансформатора соединяются со схемой внутри манипулятора R-Handle через гибкий электропроводящий гофрированный кожух 26, один раструб которого крепится к оболочке манипулятора R-Handle, а другой - к корпусу вторичной обмотки трансформатора 30. Эта конструкция позволяет индукционным способом подавать электропитание к электрическим элементам конструкции манипулятора R-Handle, находящимся на его подвижной части.
Фигура 12 - другой вариант конструкции игрового контроллера.
Фигура 13, тот же вариант конструкции игрового контроллера с обратной стороны, где 29 - аналоговый стик, 34 - прижимной фиксатор, 35 - регулятор фиксатора.
Фигура 14, вариант конструкции игрового контроллера, где 29 - аналоговый стик.
Фигура 15, тот же вариант конструкции игрового контроллера в ином ракурсе.
Фигура 16, система гидравлической корректировки усилия, где 15 - внутренняя шарообразная опора, 31 - гидравлические подушки, 32 - соединительные трубки, 33 - гидравлический регулятор.
Игровой контроллер работает следующим образом: пользователь кистью левой руки удерживает игровой контроллер за рукоятку 23, предплечье левой руки находится в устройстве фиксации 4, при этом правая рука пользователя располагается на манипуляторе R-Handle. Пальцами левой руки использует набор программируемых клавиш 3, при этом большой палец левой руки применяется для нажатия программируемых клавиш 7 и 8. Так же правой рукой можно использовать клавиатуру 5, сохраняя вышеописанное положение левой руки. Так же для цели улучшения фиксации на руке пользователя на рукоятке игрового контроллера предназначен прижимной фиксатор 34, (Фигура 13), усилие которого настраивается регулятором фиксатора 35.
Одним из основных элементов игрового контроллера является манипулятор R-Handle, который работает следующим образом: т.к. внутренняя шарообразная опора 15, соединенная соединительным штоком 9 с корпусом игрового контроллера 1, является неподвижной, оболочка шарообразной опоры 16 свободно вращается вокруг центра внутренней шарообразной опоры 15 в любой плоскости. Оптический датчик 18 использует в качестве рабочей поверхности внутреннюю поверхность оболочки шарообразной опоры 16 (Фигура-7), либо внутреннюю поверхность внутренней полусферы 24 (Фигура-8). Причем центр внутренней шарообразной опоры 15 находится в центре руки пользователя, создавая минимально возможный крутящий момент, чем достигается высокая координация и точность при наведении курсора. Помимо этого усилие на манипулятор R-Handle может регулироваться, система гидравлической корректировки усилия(Фигура 16), где 15 - внутренняя шарообразная опора, 31 - гидравлические подушки, 32 - соединительные трубки, 33 - гидравлический регулятор.
Через отверстие соединительного штока 9 внутрь шарообразной опоры 15 проложены электрические провода (на изображениях не показаны), соединенные с оптическим датчиком 18 и внутренней индукционной катушкой 22, через которую происходит обмен электрическими сигналами. Внутренняя индукционная катушка 22 возбуждает внешние индукционные катушки 21, в результате чего осуществляется работа программируемых клавиш 11, 12, 13, и ролика горизонтальной прокрутки 14 и работает на индукционном принципе.
Таким образом, манипулятор R-Handle, в отличие от компьютерной мыши, не нуждается в ровной поверхности.
На фигуре-8 показан другой вариант конструкции манипулятора R-Handle. В нем изменено расположение внутренних деталей, таких как оптический датчик 18, фокусирующая линза 19, светодиод подсветки поверхности для оптического датчика 20, внутренняя индукционная катушка 22, и добавлена внутренняя полусфера 24, внутренняя поверхность которой используется в качестве поверхности для считывания информации оптическим датчиком 18.
На фигуре-9 показан другой вариант конструкции манипулятора R-Handle. В нем изменено расположение внутренних деталей, таких как, оптический датчик 18, фокусирующая линза 19, светодиод подсветки поверхности для оптического датчика 20. В данном варианте рабочей поверхностью для оптического датчика 18, является наружная поверхность внутренней шарообразной опоры 15, причем функционирование всех электронных элементов в данной конструкции манипулятора R-Handle, электронной схемы (на изображении не показана), а также функционирование программируемых клавиш 11-12-13 и ролика горизонтальной прокрутки, совмещенного с программируемой клавишей 14, осуществляется посредством индукционного обмена между внутренней индукционной катушкой 22 и внешними индукционными катушками 21, либо с помощью трансформатора с подвижной вторичной обмоткой 27.
Работа оптического датчика манипулятора R-Handle ничем не отличается от работы оптического датчика в обычной оптической компьютерной мыши, с той разницей, что в отличие от оптической мыши, оптический датчик 18 неподвижен, а поверхность, необходимая для его работы, движется вокруг него, представляющая собой внутреннюю поверхность оболочки шарообразной опоры 16 (Фигура-7) или внутреннюю поверхность внутренней полусферы 24 (Фигура-8).
Вместо оптического датчика в конструкции манипулятора R-Handle может применяться принцип работы лазерной мыши. Также могут быть использованы гироскоп, датчик угловой скорости, акселерометр, либо использовать радиолокацию для определения положения оболочки шарообразной опоры 16 по установленным на ней датчикам и эксцентрично расположенному центральному излучателю.
Игровой контроллер может производиться в зеркальном (леворуком) варианте. Дизайн игрового контроллера может отличаться от представленного на изображениях.
Вместо клавиатуры 5 может быть установлен сенсорный экран.
Ролик горизонтальной прокрутки, совмещенный с программируемой клавишей 14, так же может быть размещен вместо одной из клавиш 11-12-13.
На корпусе 1 игрового контроллера также может быть предусмотрено универсальное крепление для фиксации на нем смартфона или планшетного компьютера.
В конструкции манипулятора R-Handle возможно использование жестких или гибких световодов. При этом оптические детали электрической схемы могут располагаться на некотором отдалении от места съема оптической информации.
Для работы манипулятора R-Handle применяется клавиша отключения светодиода 25, с помощью которой корректируется положение оболочки и находящегося на ней оптического датчика по отношению к внутренней шарообразной опоре. Это необходимо в случаях, когда поворот оболочки относительно внутренней шарообразной опоры будет ограничен соединительным штоком 9. То есть при прекращении нажатия на клавишу отключения светодиода 25, светодиод 20 прекращает освещать рабочую поверхность, вследствие чего оптический датчик прекращает работу, что позволяет пользователю, повернуть оболочку без перемещения курсора на рабочем столе монитора компьютера. После того как оболочка будет передвинута на нужный угол, пользователь нажимает пальцем на клавишу 25 и курсор вновь получает возможность перемещаться по рабочему столу монитора. Она действует так же, как пользователи приподнимают и переставляют компьютерную мышь, когда курсор доходит до края рабочего стола монитора или натыкается в какое-либо препятствие на письменном столе. Клавиша отключения светодиода может быть применена в других конструкциях манипулятора R-Handle. Клавиша отключения светодиода может быть расположена под большим пальцем руки, либо под другим пальцем, либо под ладонью и может отключать светодиод нажатием на нее. Помимо светодиода, нажатием на клавишу, возможно отключать оптический датчик или лазер.
В конструкции манипулятора R-Handle для лучшей координации курсора на «рабочем столе», возможно применение нескольких оптических датчиков, расположенных в разных плоскостях относительно друг от друга, которыми будет управлять общий процессор. Это усовершенствование позволит лучше контролировать их взаимодействие с 3-х мерным объектом (шаром) или 3-х мерными объектами в виртуальном пространстве, в отличии от 2-х мерного письменного стола и 2-х мерного экрана монитора.
Показанная на фигуре 16 система гидравлической корректировки предназначена для регулирования усилия, прилагаемого пользователем для перемещения оболочки манипулятора R-Handle, относительно внутренней шарообразной опоры. Для этого пользователю нужно повернуть регулятор 32, при этом жидкость, заполняющая систему, через соединительные трубки 33 будет вытеснена в гидравлические подушки 31 или наоборот откачает ее из них.
Система гидравлической фиксации (Фигура 13) предназначена для улучшения фиксации руки пользователя на рукоятке игрового контроллера.
Игровой контроллер может быть подключен к любому вычислительному устройству как проводным, так и беспроводным способом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИГРОВОЙ КОНТРОЛЛЕР | 2015 |
|
RU2611989C2 |
| УСТРОЙСТВО ВВОДА КООРДИНАТ | 2016 |
|
RU2669084C2 |
| УСТРОЙСТВО ВВОДА КООРДИНАТ | 2017 |
|
RU2669093C2 |
| Авиационный сайдстик | 2021 |
|
RU2784990C1 |
| Устройство для управления | 2020 |
|
RU2730081C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ В ЭВМ И УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ В ЭВМ | 2003 |
|
RU2251725C2 |
| СПОСОБ И УСТРОЙСТВО ПАССИВНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2377626C2 |
| УКАЗАТЕЛЬНОЕ УСТРОЙСТВО "МЫШЬ" - ПЕРСОНАЛЬНЫЙ КОМПЬЮТЕР | 2017 |
|
RU2659592C2 |
| СЪЕМНОЕ УСТРОЙСТВО ОБРАБОТКИ, ХРАНЕНИЯ И ВНЕШНЕГО ВВОДА ДАННЫХ ДЛЯ МОБИЛЬНЫХ УСТРОЙСТВ | 2017 |
|
RU2733070C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МАНИПУЛЯТОРА ТИПА "МЫШЬ" ИЛИ "ЭЛЕКТРОННОЕ ПЕРО" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368941C1 |














Изобретение относится к игровым контроллерам. Технический результат заключается в обеспечении игрового контроллера, выполняющего функции стандартного средства управления персонального компьютера и повышении точности ввода данных. Устройство состоит из корпуса, набора программируемых клавиш, клавиатуры, устройства для фиксации игрового контроллера на руке пользователя, системы манипулятора R-Handle, представляющий из себя модифицированный вариант компьютерной мыши, системы гидравлической корректировки усилия, системы регулируемого прижимного фиксатора, системы индукционной передачи электроэнергии с помощью трансформатора с подвижной вторичной обмоткой через гибкий электропроводящий кожух, системы гибких или жестких световодов, системы, состоящей из нескольких оптических датчиков, наличием клавиши отключения светодиода, оптического датчика или лазера. 16 ил.
Игровой контроллер предназначен для работы с любыми игровыми консолями, персональными компьютерами, планшетами, смартфонами и управления различной беспилотной техникой и состоит из корпуса, набора программируемых клавиш, клавиатуры, устройства для фиксации игрового контроллера на руке пользователя и манипулятора R-Handle, и отличается тем, что:
игровой контроллер является гибридом геймпада, клавиатуры и компьютерной мыши и управляется кистью руки,
наличием в конструкции игрового контроллера системы индукционной передачи электроэнергии с помощью трансформатора с подвижной вторичной обмоткой через гибкий электропроводящий кожух,
наличием системы регулируемого прижимного фиксатора на рукоятке игрового контроллера для крепления на руке пользователя,
наличием системы гидравлической корректировки усилия, позволяющей пользователю регулировать усилие при работе с манипулятором R-Handle,
наличием системы гибких или жестких световодов,
наличием системы нескольких оптических датчиков,
наличием клавиши отключения светодиода, оптического датчика, лазера или радиолокационного датчика.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ С АНАЛОГОВЫМ ДЖОЙСТИКОМ (ВАРИАНТЫ) | 1996 |
|
RU2163159C2 |

