Устройство для управления (далее: устройство)- это устройство состоящее из рукоятки, неподвижного основания и механизма находящейся под неподвижным основанием. Устройство может применяться для управления различной пилотируемой и беспилотной техникой, в т.ч., летающей, наземной, подводной, а также для управления работы с компьютерным оборудованием, в частности, для управления космическими аппаратами в космическом пространстве. Помимо этого, устройство может применяться для управления в компьютерных играх.
Устройство выполняет аналогичные функции как у известной конструкции джойстика, например как описано в патенте US 4870389 A, а также как у известных конструкций сайдстиков описанных в патентах: US 5149023 A, GB 2484830 A, US 9051836 B2, US 9056675 B2, US 9067672 B2, US 9405312 B2.
Все эти устройства объединяет несколько недостатков, которые затрудняют контроль с их помощью - это большое расстояние между рукояткой и осью вращения, как в патенте US 5149023 A, или недостаточное количество степеней свободы как в патенте US 9051836 B2.
Предлагаемое устройство лишено перечисленных недостатков, что представлено фигурами:
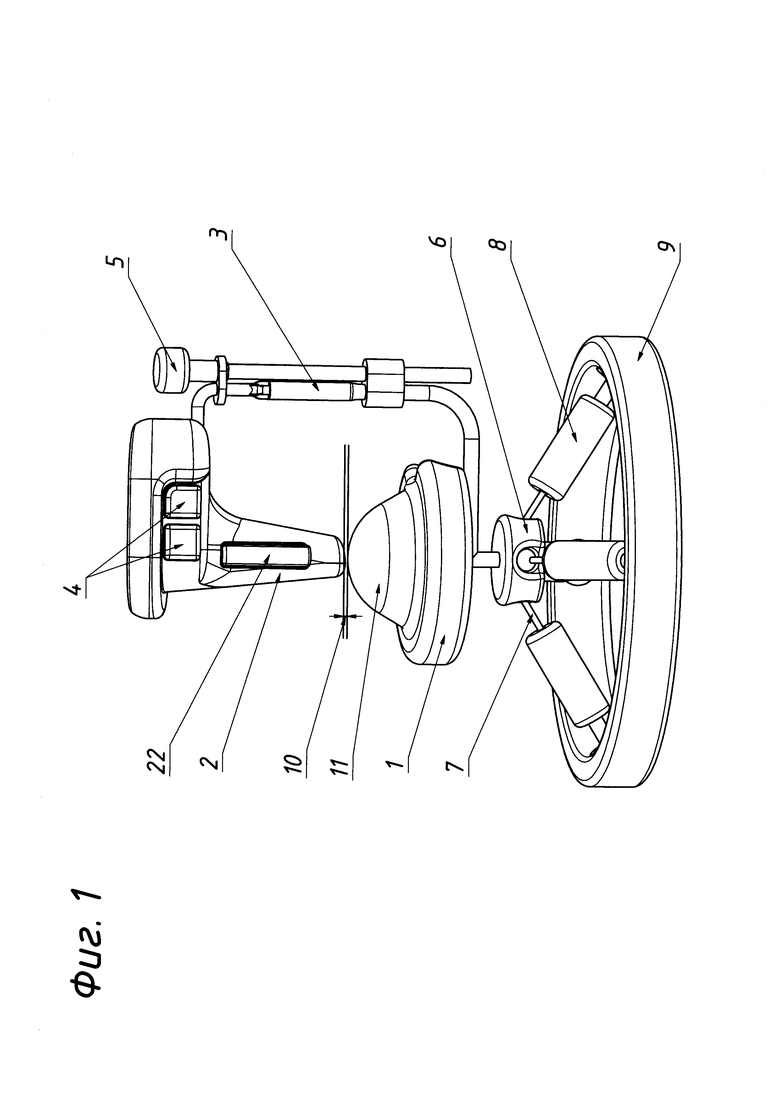
Фигура 1, вид спереди, где
1 неподвижное основание, 11 полусфера, 2 рукоятка, 3 кронштейн, 4 передние кнопки, 5 регулировочный винт, 6 главное крепление, 7 сердечник со сферой, 8 соленоид со сферой, 9 нижнее неподвижное основание, 10 зазор, 22 курок-выключатель
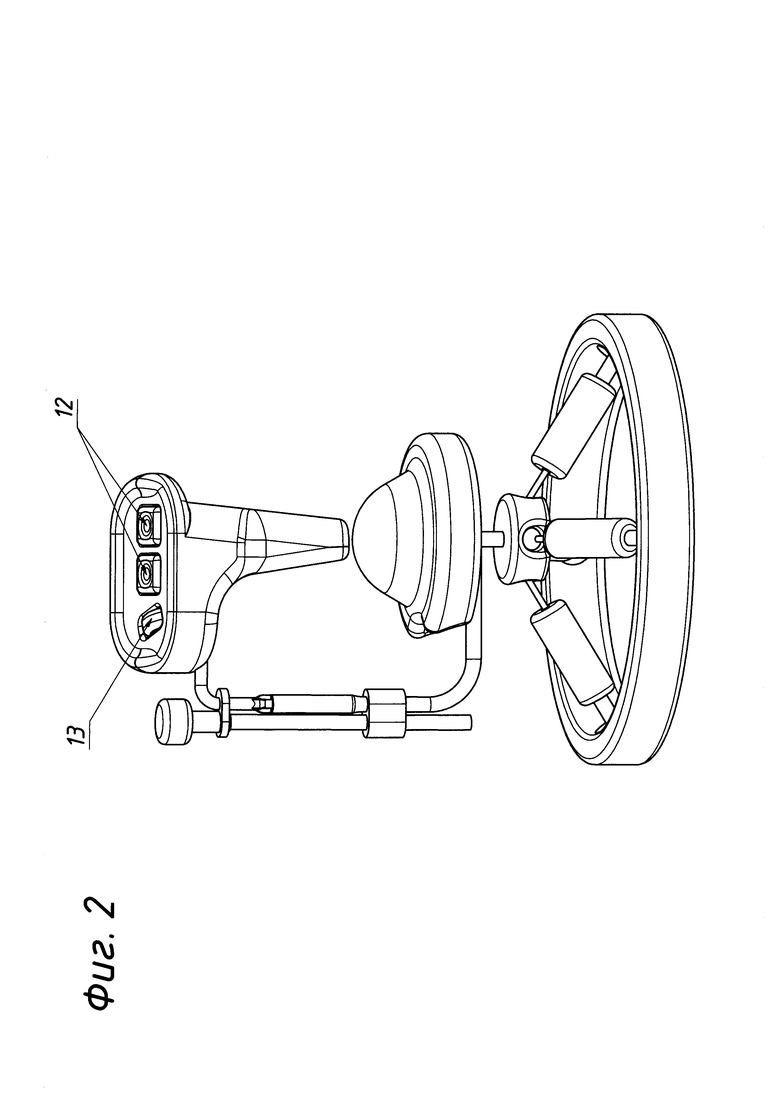
Фигура 2, вид сзади, где
12 задние кнопки, 13 колесо прокрутки.
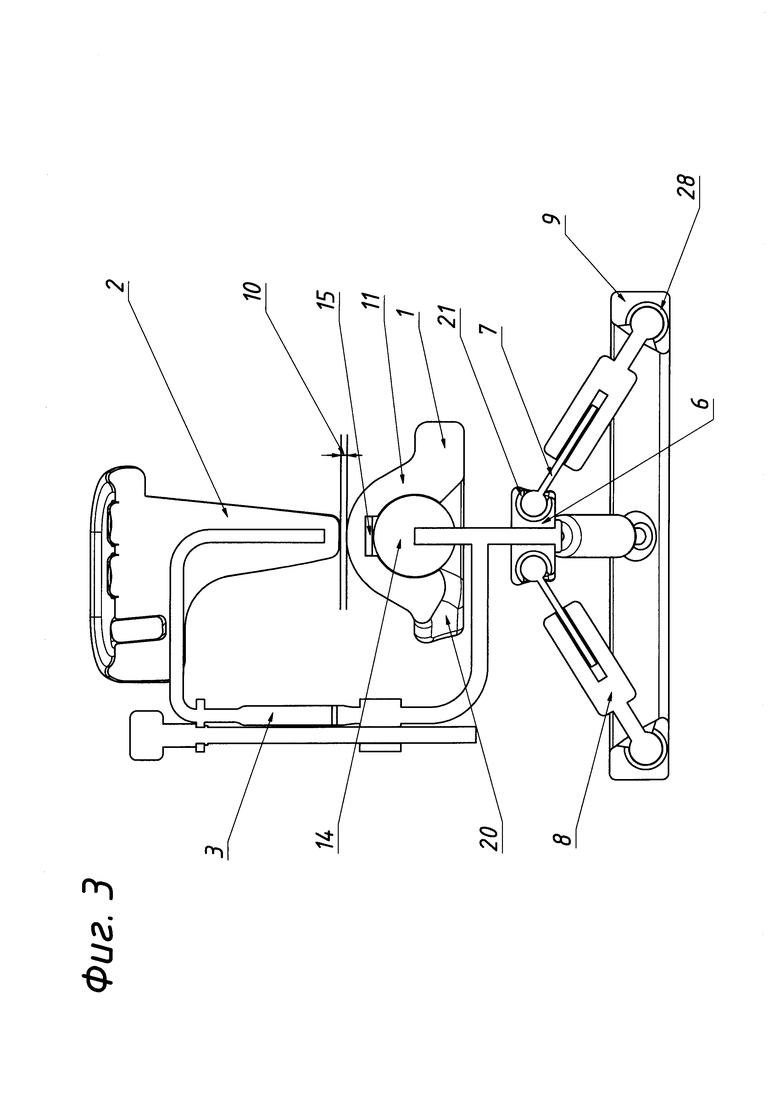
Фигура 3, где
в разрезе показаны: 1 неподвижное основание, 2 рукоятка, 3 кронштейн, 6 главное крепление, 7 сердечник со сферой, 11 полусфера, 10 зазор, 14 сфера, 8 соленоид со сферой, 9 нижнее неподвижное основание, 15 оптический сенсор, 20 выемка для кронштейна, 21 сферическая полость главного крепления, 28. сферическая полость.
Фигура 4, где,
показан кронштейн 3, где 5 регулировочный винт, 18 крепление регулировочного винта (5), 19 гайка, 6 главное крепление, 21 сферическая полость главного крепления, на выноске (разрез по линии D-D):
3(б) нижняя часть кронштейна (3), 3(a) верхняя часть кронштейна (3), 18 крепление регулировочного винта (5), 6 главное крепление
Фигура 5, где,
1 неподвижное основание, 2 рукоятка, 14 сфера, 15 оптический сенсор, 16 колодки с постоянными магнитами, 17 электромагниты, 23 кронштейн пружины, 24 пружина.
Фигура 6, где,
14 сфера, 16 колодки с постоянными магнитами, 17 электромагниты.
Фигура 7, где
1 неподвижное основание, 3 кронштейн, 14 сфера, 25 кронштейн маятникого указателя, 26 маятниковый указатель, 27 неподвижный полусферический корпус с датчиками.
Фигура 8, где 22 курок-выключатель.
Устройство состоит из рукоятки 2 (фигура 1) с передними кнопками 4 и задними кнопками 12 (фигура 2), а также колесом прокрутки 13. неподвижного основания 1, которое имеет полусферу 11 изготовленную из скользкого материала и курка-выключателя 22 (фигуры 1 и 8). В неподвижное основание 1 встроена подвижная сфера 14 (фигура 3), имеющая жесткое соединение с рукояткой 2 при помощи кронштейна 3, который имеет возможность регулировки по длине при помощи регулировочного винта 5. С нижней стороны у неподвижного основания 1 имеется выемка для кронштейна 20, которая служат для ограничения перемещения кронштейна 3.
Сфера 14 (фигура 3) жестко соединена с главным креплением 6 через кронштейн 3. Главное крепление 6 имеет сферические полости главного крепления 21 (фигура 3, 4), в которые вставлены сердечники со сферами 7, которые в свою очередь входят в соленоиды со сферами 8, сферы которых помещены в сферические полости 28 нижнего неподвижного основания 9 (фигура 3). Показанный на фигурах механизм расположенный ниже сферы 14 предназначен для имитации обратной связи с исполняющими механизмами транспортного средства, управляемого при помощи представленного устройства. Кроме того, на фигуре 3 представлен вариант конструкции кронштейна 3, состоящего из верхней части (выноска D-D) 3(a) и нижней части 3(б), а также крепления регулировочного винта 18, гайки 19, регулировочного винта 5, главного крепления 6 с сферической полостью главного крепления 21. Кроме представленного варианта кронштейна 3, возможны иные конструкции.
Также возможно другое решение для осуществления имитации обратной связи. Например: Фигуры 5 и 6, где имеется неподвижное основание 1, расположенная в ней сфера 14, оптический сенсор 15, кронштейн 3, кронштейн пружины 23, пружина 24. Пружина предназначена для осуществления возврата рукоятки 2 в вертикальное положение. Помимо пружины возможно использование соленоид со сферой 8 и сердечник со сферой 7 или гидравлического цилиндра (на фигурах не показан). По сторонам сферы 14 (фигуры 6 и 7), расположены колодки с постоянными магнитами 16, имеющие возможность перемещаться на небольшие расстояние в сторону центра сферы 14 и электромагниты 17, закрепленные неподвижно. Для создания имитации обратной связи с исполняющими механизмами, на электромагниты подается электрический ток, при прохождении которого через обмотки электромагнитов 17 создается магнитное поле с одноименным расположением полюсов сторону сферы. При этом, колодки с постоянными магнитами 16, магниты которых расположены такими же полюсами в сторону электромагнитов, при подаче электрического тока на обмотки электромагнитов 17 оттолкнуться от них и сдавят сферу 14. Таким образом при перемещении рукоятки 2 пользователь будет ощущать сопротивление его усилию.
Также возможна схема, в которой (фигура 7) кронштейн 3, неподвижное основание 1, сфера 14, кронштейн маятникового указателя 25, маятниковый указатель 26, неподвижный полусферический корпус с датчиками 27. Датчики на фигуре 7 не показаны. Положение рукоятки 2 будет отслеживаться при повороте сферы 14, размещенной в неподвижном основании 1, которая при помощи кронштейна маятникового указателя 25 будет перемещать маятниковый указатель 26, который, при изменении положения рукоятки, 2 будет указывать на один из электромагнитных датчиков расположенных на неподвижном полусферическом корпусе с датчиками 27 (датчики на фигурах не показаны). При перемещении рукоятки 2 данные с электромагнитных датчиков передаются на вычислительное устройство управляемого механизма, тем самым определяя направление и расстояние перемещения рукоятки 2. На основании полученных данных, вычислительное устройство формирует команды и отправляет их исполняющим механизмам управляемого транспортного средства.
Возможно исполнение представленного устройства как для правой так и для левой руки.
Ниже описан пример для правой руки.
Устройство работает следующим образом:
пользователь рукой держит рукоятку 2, которая имеет форму, несколько зауженную к низу. Такая форма рукоятки 2 нужна для того, чтобы при сжатии рукоятки рука пользователя получала небольшой вектор силы направленный вниз, для создания условий осуществления надежного тактильного контакта руки пользователя с полусферой 11 при котором, боковая сторона мизинца и ребро ладони образуют "кольцо", которое охватывает низ рукоятки 2 и опирается на полусферу 11 изготовленную из скользкого материала. Большой палец руки находится над или рядом с рукояткой 2, где расположены задние кнопки 12 и колесо прокрутки 13, при этом указательный палец находится с передней стороны рукоятки 2, перед или рядом с передними кнопками 4. Остальные три пальца (средний, безымянный, мизинец) охватывают рукоятку 2 и в тоже время нажимают на курок-выключатель 22 (фигуры 1 и 8), предназначенный для включения оптического сенсора 15. При нажатии на курок-выключатель 22, происходит включение оптического сенсора 15 (фигуры 3 и 5) и он начинает считывает информацию со сферы 14 (фигуры 3, 5, 7). Эта функция может быть полезна в ситуации, когда во время использования устройства, при перемещении рукоятки 2 кронштейн 3 достигнет предельного угла перемещения, и он упрется в стенку выемки для кронштейна 20. В этом случае пользователь разжимает пальцы и освобождает тем самым курок-выключатель 22, который отключает оптический сенсор и после этого пользователь может переместить рукоятку 2 в среднее положение без опасения, что во время этого перемещения оптический сенсор 15 будет в активном состоянии. Возможен вариант исполнения устройства без передних кнопок 4. В этом варианте охватывать рукоятку 2 и нажимать курок-выключатель 22 будут четыре пальца руки пользователя т.е., указательный, средний, безымянный, мизинец.
Удерживая рукоятку рукой таким образом, пользователь может двигать ею во всех направлениях, в пределах сектора ограниченного выемкой для кронштейна 20 (фигура 3), при этом оптический сенсор 15 продолжит считывать информацию о перемещении рукоятки 2, а боковая сторона мизинца и ребро ладони будут сохранять тактильный контакт с полусферой 11. Тактильный контакт с полусферой 11, выполненной из скользкого материала позволяет пользователю точно позиционировать положение руки при управлении различными транспортными средствами и компьютерным оборудованием. При этом он сможет, удерживая рукоятку 2, сохраняющей через руку пользователя тактильный контакт с неподвижным основанием 1, зафиксировать ее в любом месте неподвижного основания 1, не опасаясь, что его рука и вместе с ней рукоятка 2 сдвинется. Причем, пользователь, в соответствии с размером его руки, с помощью регулировочного винта 5, вращая его, может уменьшать или увеличивать зазор 10, изменяя таким образом длину кронштейна 3, состоящую из верхней части кронштейна 3(a) и нижней части кронштейна 3(б). Соответственно вместе с этим будет меняться и расстояние от рукоятки 2 до поверхности полусферы 11. В этом узле может быть применен шаговый двигатель, т.е., настройка под размер руки может быть автоматизирована и в том случае если джойстиком (сайдстиком) будет пользоваться несколько человек, то их данные могут быть занесены в блок памяти и при смене пользователя, подстройка длины кронштейна 3 будет производиться автоматически.
При использовании устройства и при изменении положения рукоятки 2 относительно полусферы 11, усилие передается при помощи кронштейна 3 на сферу 14 (фигура 3). При повороте сферы 14, оптический сенсор 15, направленный на нее, зарегистрирует это перемещение и передаст данные о нем на вычислительное устройство, которое определит его направление, траекторию этого действия и после этого исполняющим механизмам управляемого транспортного средства будут переданы соответствующие команды. При этом, для имитации обратной связи исполняющих механизмов с рукой пользователя в конструкции устройства имеется механизм расположенный под неподвижным основанием 1. Этом механизм соединен с сферой 14 через кронштейн 3, который при помощи сердечников со сферами 7 закрепленных в сферических полостях главного крепления 21 (фигура 3) и соленоидов со сферами 8, закрепленными в сферических полостях 28 нижнего неподвижного основания 9 (фигура 3). Этот механизм создает для пользователя имитацию противодействия исполняющих механизмов транспортного средства управляемого с помощью представленного устройства.
Имитация противодействия исполняющих механизмов осуществляется сердечниками со сферами 7 и соленоидами со сферами 8 при помощи вычислительного устройства в соответствии с заложенной в него программой, которая управляет понижением или повышением напряжения электрического тока подаваемого на некоторые соленоиды со сферами 8, в зависимости от направления и протяженности перемещения рукоятки 2. При подаче тока на соленоид со сферой 8, он при помощи возникшего в нем магнитного поля втягивает в себя сердечник со сферой 7, при этом на все остальные соленоиды со сферами 8, расположенные рядом с ним или с противоположной стороны нижнего неподвижного основания 9, может быть подан больший или меньший ток, в зависимости от того, какое движение зафиксировал оптический сенсор 15, при этом пользователь, удерживающий рукой рукоятку 2, ощутит противодействующее усилие.
На прилагаемых фигурах изображено четыре пары сердечников со сферами 7 и соленоидов со сферами 8, но в реальном устройстве их количество может быть другим, а также вместо них могут применяться гидравлические механизмы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Авиационный сайдстик | 2021 |
|
RU2784990C1 |
| ИГРОВОЙ КОНТРОЛЛЕР | 2016 |
|
RU2658139C1 |
| ИГРОВОЙ КОНТРОЛЛЕР | 2015 |
|
RU2611989C2 |
| УСТРОЙСТВО ВВОДА КООРДИНАТ | 2017 |
|
RU2669093C2 |
| УСТРОЙСТВО ВВОДА КООРДИНАТ | 2016 |
|
RU2669084C2 |
| Сегментированный матрас | 2022 |
|
RU2793224C1 |
| Сегментированный матрас | 2022 |
|
RU2793225C1 |
| Основа сегментированного матраса | 2023 |
|
RU2829094C1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ НА ПЛАВУ АВАРИЙНОГО СУДНА И ПОДЪЕМА ЗАТОНУВШИХ СУДОВ | 2015 |
|
RU2593173C1 |
| НАГРУЗОЧНОЕ УСТРОЙСТВО ТРЕНАЖЕРА (Варианты) | 2016 |
|
RU2619557C1 |





Изобретение относится к устройству для управления различной пилотируемой и беспилотной техникой, в том числе летающей, наземной, подводной, а также для работы с компьютерным оборудованием, а также для управления космическими аппаратами. Устройство состоит из рукоятки с кнопками, кронштейна, неподвижного основания и механизма, осуществляющего имитацию обратной связи. Кронштейн выполнен регулируемым по высоте, неподвижное основание с верхней стороны имеет полусферу, изготовленную из скользкого материала, сферу, размещенную внутри полусферы, соединенную с рукояткой, имеющей курок-выключатель и жестко соединенной с изогнутым кронштейном с боковой или нижней стороной сферы. В неподвижном основании имеется оптический, электромагнитный или лазерный сенсор. Информация о перемещении рукоятки считывается со сферы оптическим сенсором, включаемым и отключаемым по желанию пользователя при помощи курка-выключателя. Механизм, осуществляющий имитацию обратной связи руки пользователя, удерживающей рукоятку, с исполняющими механизмами управляемого транспортного средства, состоит из нижнего неподвижного основания, сердечников со сферами и соленоидов со сферами, на которые подается электрический ток, регулируемый вычислительным устройством и изменяемый по силе на основании данных, полученных от оптического сенсора. Обеспечивается облегчение управления за счет сокращения расстояния между рукояткой и осью вращения и увеличения степеней свободы. 8 ил.
Устройство для управления, состоящее из рукоятки с кнопками, кронштейна, неподвижного основания и механизма, осуществляющего имитацию обратной связи и находящегося под основанием, отличается тем, что кронштейн выполнен регулируемым по высоте, неподвижное основание с верхней стороны имеет полусферу, изготовленную из скользкого материала, сферу, размещенную внутри полусферы, соединенную с рукояткой, имеющей курок-выключатель и жестко соединенной с изогнутым кронштейном с боковой или нижней стороной сферы, в неподвижном основании имеется оптический, электромагнитный или лазерный сенсор, при этом информация о перемещении рукоятки считывается со сферы оптическим сенсором, включаемым и отключаемым по желанию пользователя при помощи курка-выключателя, размещенного на рукоятке, между рукояткой и полусферой сохраняется зазор, благодаря которому при удержании рукоятки, рука пользователя скользит по полусфере, чем обеспечивается тактильный контакт между рукояткой и полусферой, расположенной на неподвижном основании, а механизм, осуществляющий имитацию обратной связи руки пользователя, удерживающей рукоятку, с исполняющими механизмами управляемого транспортного средства, состоит из нижнего неподвижного основания, сердечников со сферами и соленоидов со сферами, на которые подается электрический ток, регулируемый вычислительным устройством и изменяемый по силе на основании данных, полученных от оптического сенсора.
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2643856C2 |
| US 2013209256 A1, 15.08.2013 | |||
| TW 259719 B, 11.10.1995 | |||
| Автоматический телефонный коммутатор | 1923 |
|
SU1850A1 |
| JP H07259132 A, 09.10.1995. | |||

