Изобретение относится к двигателестроению, точнее к поршневым рядным четырехтактным двухцилиндровым двигателям внутреннего сгорания, конкретно к устройствам, предназначенным для уравновешивания сил инерции, моментов этих сил и реактивного крутящего момента в двигателях типа R2 с помощью балансирных валов.
Из уровня техники известны разнообразные конструктивные построения устройств, предназначенных для уравновешивания поршневых рядных двухцилиндровых двигателей внутреннего сгорания (далее ДВС) с помощью балансирных валов, кинематически связанных с коленвалом двигателя и обеспечивающих уравновешивание как сил инерции и моментов этих сил, так и реактивного крутящего момента (РКМ).
К примеру, известно уравновешивающее устройство для ДВС в виде системы пары соосных друг другу балансировочных валов с противовесами с односторонним размещением относительно коленчатого вала, имеющих противоположные направления вращения и одинаковую с коленчатым валом частоту вращения (RU 2753431,2021г). В нем решена задача минимизации габаритов и массы двигателя за счет минимальных межосевых расстояний между коленчатым и балансировочными валами и оптимизации траектории прохождения балансировочного вала относительно нижней головки шатуна, однако недостатком является некоторая усложненость привода из-за большого количества шестеренных зацеплений (необходимо не менее 4-х шестерен) и невозможность оптимального уравновешивания РКМ за счет соответствующего положения осей балансирных валов, т.к. для обеспечения оптимальной уравновешенности требуется строго определенное межосевое расстояние, зависящее от весогабаритных параметров конкретного ДВС и режимов его работы.
Известен также механизм уравновешивания двухцилиндрового двигателя с двумя противовесами, установленными по одному на коленчатом и балансирном вале, причем ось балансирного вала расположена в вертикальной плоскости параллельно коленчатому под ним (RU 2097571, 1997 г.). Балансирный вал вращается с той же угловой скоростью, что и коленчатый в противоположном направлении. За счет установки противовесов с необходимыми значениями дисбалансов обеспечивается полное уравновешивание сил инерции возвратно поступательно движущихся масс (ВПДМ) 1го порядка и частичное уравновешивание РКМ. Недостатком является невозможность обеспечения оптимального уравновешивания РКМ при однозначно заданном положении оси балансирного вала (отсутствие горизонтального смещения) и ограничениях координат его расположения (балансирный вал должен находиться вне траектории вращающихся элементов кривошипно-шатунного механизма). Ведь для выполнения условий оптимального уравновешивания РКМ требуется обеспечение специально определяемых смещений оси балансирного вала относительно коленчатого, как по вертикали, так и по горизонтали.
Наиболее близким аналогом (прототипом) изобретения является двухвальное устройство уравновешивания ДВС, японской фирмы «Дайхатцу», описанное в статье Бородянского Л.Х. «Уравновешивание сил инерции первого порядка малоразмерного ДВС», журнал «Автомобильная промышленность», №10, 1994г, рис.1б, с. 20, в котором уравновешивание осуществляется тремя дисбалансами, один из которых расположен на коленчатом вале, а другие на двух соосно с ним установленных балансирных валах (по одному на каждом). Дисбалансы противовесов подбирают из условия полного уравновешивания сил инерции 1-го порядка ВПДМ, их значения определяются из условия: M1r1=M2r2= 0,5M0r0; M0r0= M⋅R, где R - радиус кривошипа коленчатого вала; М – ВПДМ кривошипно-шатунного механизма ДВС (одного цилиндра); M1r1, M2r2, M0r0 - дисбалансы на обоих балансирных валах и коленчатом вале соответственно. Центры масс всех трех противовесов располагают в плоскости, проходящей через середину коленчатого вала перпендикулярно его оси. Оба балансирных вала приводятся шестеренным приводом непосредственно от коленчатого, так что вращаются в противоположном ему направлении и с той же угловой скоростью. В прототипе для привода балансирных валов используется меньшее число шестерен, чем в первом аналоге, кроме того за счет использования 3-х дисбалансов, один из которых установлен на коленчатом, разгружаются подшипники балансирных валов, что обеспечивает компактность и надежность конструкции. Как показал специальный анализ уравновешенности рассматриваемых конструкций рядных двухцилиндровых ДВС (Гусаров В.В., Апелинский Д.В. Новые возможности уравновешивания ДВС типа R2. Журнал «Известия МГТУ «МАМИ». Технические и естественные науки». №1, (43) 2020 г., с. 42-49.) для оптимального уравновешивания РКМ необходимо обеспечивать строго задаваемые (находимые расчетом с учетом весогабаритных параметров и режимов работы) положения осей балансирных валов, соответствующих разным «смещениям» обоих балансирных валов относительно оси коленчатого вала. В этой связи недостатком конструкции прототипа является сложность реализации точных значений оптимальных, по уравновешенности от РКМ, положений осей балансирных валов тремя шестернями, имеющими одинаковые диаметры начальных окружностей и число зубьев.
Задача заявленного технического решения заключается в разработке уравновешивающего устройства, обеспечивающего полное уравновешивание сил инерции 1го порядка от ВПДМ и точную реализацию оптимальных условий частичного уравновешивания реактивного крутящего момента в рядном четырехтактном двухцилиндровом ДВС с произвольными весогабаритными параметрами за счет специально задаваемых значений дисбалансов на коленчатом и каждом их двух балансирных валов так, чтобы их можно было достаточно просто и удобно разместить на уравновешиваемом ДВС с учетом задаваемых значений координат их осей.
Технический результат, получаемый при реализации решения заключается в упрощении процесса реализации уравновешивания двухпоршневого четырехтактного ДВС при повышении эффективности уравновешивания реактивного крутящего момента за счет симметричной установки двух балансирных валов с заданным вертикальным смещением относительно оси коленчатого вала и с заданными значениями дисбалансов на трех валах, включая коленчатый.
Заявленный технический результат достигается тем, что в предлагаемом устройстве уравновешивания поршневого рядного двухцилиндрового четырехтактного двигателя внутреннего сгорания посредством трех противовесов, один из которых с дисбалансом M0r0 размещен на коленчатом валу двигателя, а два других: с дисбалансами M1r1 и M2r2 - по одному на каждом из двух балансирных валов, кинематически связанных с коленчатым валом с возможностью вращения с идентичной ему угловой скоростью и в противоположном с ним направлении, в котором балансирные валы размещены симметрично оси коленчатого вала с заданным смещением «а» их осей по вертикали, центры масс всех трех противовесов расположены в плоскости, перпендикулярной оси коленчатого вала проходящей через его середину, причем так чтобы положение центров масс противовесов балансирных валов соответствовало углу ϕ поворота кривошипа коленчатого вала, и величины смещения «а» и дисбалансов M1r1, M2r2 и M0r0 определены, исходя из весогабаритных параметров и режимов работы конкретного уравновешиваемого двигателя из условия: M1r1 + M2r2 = M0r0 и M0r0= M⋅R, где: R -радиус кривошипа коленчатого вала, М – возвратно-поступательно движущаяся масса кривошипно-шатунного механизма двигателя (одного цилиндра), согласно изобретению противовесы балансирных валов выполнены с различными дисбалансами (M1r1 ≠ M2r2, ) и при этом достаточные для максимально возможного оптимального достижения уравновешивания реактивного крутящего момента соотношение величин этих дисбалансов и величины смещения «а» осей валов определены по установленному путем моделирования по значениям массы ВПДМ, радиуса кривошипа R, частоты вращения и значения крутящего момента двигателя за период (720°) результирующему импульсу опрокидывающего момента за этот период, а упомянутый дисбаланс коленчатого вала M0r0 выполнен суммарным, реализуемым путем установки на щеках коленчатого вала и связанных с ним деталей: шкиве и маховике «n» отдельных противовесов целесообразной по конструктивным соображениям формы, величины которых определяются из условия: 
 , где
, где  - дисбалансы отдельных противовесов,
- дисбалансы отдельных противовесов,  - расстояние от центра масс указанных противовесов до упомянутой плоскости, перпендикулярной оси коленчатого вала проходящей через его середину.
- расстояние от центра масс указанных противовесов до упомянутой плоскости, перпендикулярной оси коленчатого вала проходящей через его середину.
При этом достигается заявленное оптимальное уравновешивание для ДВС рассматриваемого типа при любых весогабаритных параметрах, чем обеспечивается значительное преимущество предлагаемого изобретения в отличие от прототипа, где для достижения оптимального уравновешивания необходимо обеспечивать точное задаваемое несимметричное положение осей балансирных валов с относительными смещениями как по вертикали, так и по горизонтали, что по конструктивным соображениям в некоторых случаях затруднительно.
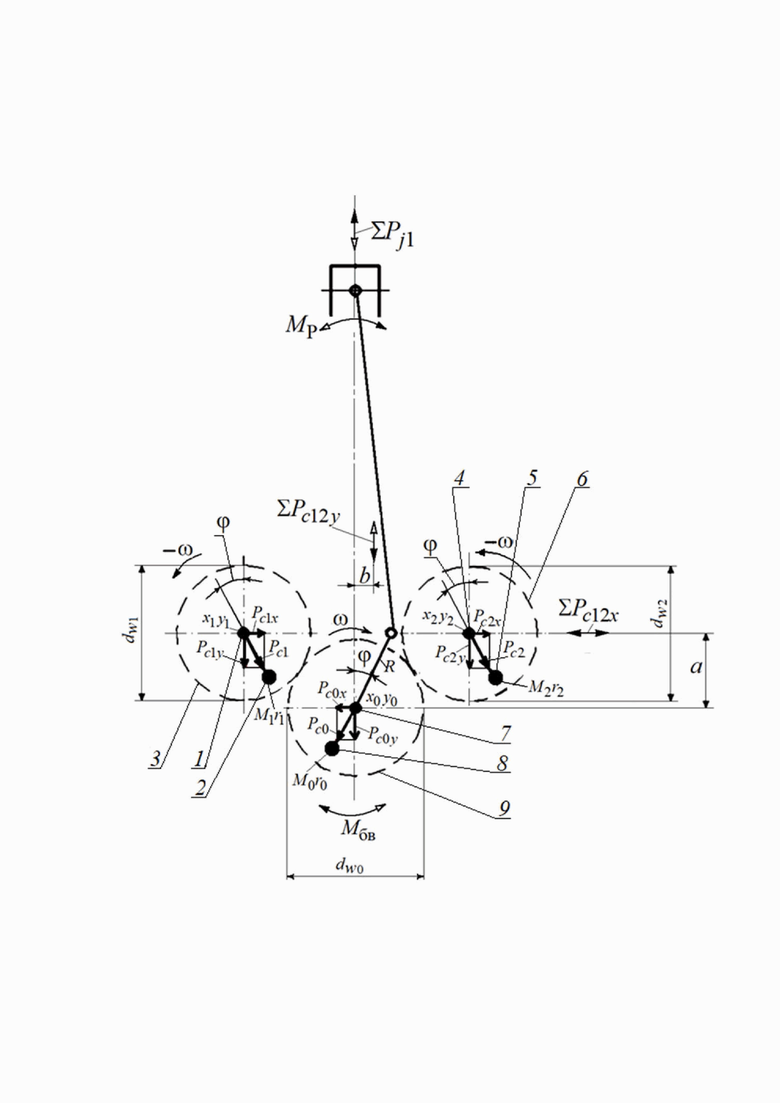
На представленном чертеже дана схема общего вида предлагаемого устройства, где:
1. Ось 1-го балансирного вала.
2. Дисбаланс противовеса 1-го балансирного вала.
3. Шестерня привода 1-го балансирного вала.
4. Ось 2-го балансирного вала.
5. Дисбаланс противовеса 2-го балансирного вала.
6. Шестерня привода 2-го балансирного вала.
7. Ось коленчатого вала.
8. Дисбаланс противовеса коленчатого вала
9. Шестерня, установленная на коленчатом вале.
В соответствии с изобретением оси балансирных валов 1 и 4 расположены симметрично относительно вертикали, так что их горизонтальные координаты равны по модулю и противоположны по знаку: х1=-х2. Причем их значения могут быть произвольными. Здесь принято, что за начало осей координат принято положение центра оси 7 коленчатого вала: х1=0, у1=0. Задаваемые значения вертикального смещения осей балансирных валов, определяемые размером «а», так что у1=у2=а, и их дисбалансы M1r1 и M2r2 находят расчетом из условия оптимального уравновешивания реактивного крутящего момента. Задача оптимизации решается численным методом нахождения экстремума (минимума) в программе Microsoft Excel с использованием команды «Поиск решений» панели инструментов программы. Исходными данными являются вышеуказанные значения массы ВПДМ, радиус кривошипа R, частота вращения и значения крутящего момента ДВС за период (720°), который вводят либо в виде дискретных (табличных) данных, например, по результатам экспериментальных исследований, либо в виде аналитических зависимостей. Целевой функцией является импульс результирующего опрокидывающего момента за период (720°), а определяемыми переменными - соотношение дисбалансов и величина вертикального смещения осей балансирных валов относительно оси коленчатого вала. Привод балансирных валов, в соответствии с представленным чертежом, осуществляется с помощью 3-х шестерен 3, 6, 9 с одинаковыми диаметрами начальных окружностей: dw1= dw2= dw0 (достаточно произвольными, ограничиваемыми лишь возможностью обеспечения требуемого размера «а» и компоновочными условиями) и одинаковым числом зубьев, так, что обеспечивается вращение балансирных валов со скоростью вращения коленчатого и в противоположном ему направлении. В частных случаях исполнения изобретения привод балансирных валов может быть выполнен любым другим целесообразным образом, обеспечивающим отсутствие проскальзывание в системе привода, например, с помощью зубчатого ремня или цепного привода.
Устройство содержит противовесы с дисбалансами, показанными в позициях 2, 5 на балансирных валах и 8 на коленчатом. Центры масс дисбалансов расположены так, чтобы их положение соответствовало углу поворота кривошипа коленчатого вала ϕ. Дисбаланс коленчатого вала выполняется суммарным путем установки на щеках коленчатого вала и связанных с ним деталей: шкиве и маховике - «n» отдельных противовесов целесообразной по конструктивным соображениям формы, величины которых определяются из условия: , где - дисбалансы отдельных противовесов, - расстояние от центра масс указанных противовесов до упомянутой плоскости, перпендикулярной оси коленчатого вала проходящей через его середину. Конструктивные параметры противовесов и их количество на коленчатом назначают произвольно из компоновочных и иных соображений, так, чтобы обеспечить требуемые значения дисбалансов и свободное вращение (без задевания).
При работе ДВС коленчатый вал вращается с угловой скоростью ω, а балансирные валы с такой же скоростью в противоположном направлении -ω. От дисбалансов 2, 5, 8 возникают центробежные силы Рс1, Рс2, Рс0, которые приложены к осям соответствующих валов. Анализ этих сил, выполняемый с их разложением на вертикальные: Рс1у, Рс2у, Рс0у и горизонтальные: Рс1х, Рс2х, Рс0х составляющие показывает, что для принятых значений дисбалансов обеспечивается полное уравновешивание вертикальной результирующей силы инерции 1го порядка от ВПДМ ∑Pj1, а результирующая горизонтальных центробежных сил равна нулю. В то же время из-за вертикального смещения балансирных валов (размер «а») и разных значений дисбалансов (M1r1 M2r2) обеспечивающих смещение линии действия результирующей силы ∑Рс12у на величину b, возникает гармонический момент Мбв от центробежных сил противовесов: Мбв= M0r0⋅ω2⋅(а∙sinϕ+b⋅cosφ), где b - расстояние от плоскости, проходящей через оси цилиндров, до линии действия результирующей вертикальных составляющих центробежных сил противовесов ∑Рс12у : b= х1⋅(M1r1 - M2r2)/M0r0. Этот момент действует в той же плоскости, что и реактивный крутящий момент (РКМ) Мр, складывается с ним и обеспечивает его уравновешивание (уменьшает возмущающее действие). Проведенные авторами исследования (Гусаров В.В., Апелинский Д.В. «Новые возможности уравновешивания ДВС типа R2.», Журнал «Известия МГТУ «МАМИ». Технические и естественные науки». №1, (43) 2020 г., стр.42-49) показали возможность достижения высокой эффективности такого уравновешивания опрокидывающего момента.
Необходимый дисбаланс на коленчатом валу может быть реализован не только путем установки специального противовеса, но и за счет утолщений на маховике и шкиве. При относительно небольших значениях дисбалансов противовесов на балансирных валах их можно реализовать за счет выточек «лысок» на цилиндрической части валов, что упрощает конструкцию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство уравновешивания поршневого рядного двухцилиндрового четырёхтактного двигателя внутреннего сгорания | 2023 |
|
RU2796180C1 |
| Силовой агрегат | 2023 |
|
RU2826661C1 |
| КОНСТРУКЦИЯ ПЯТИЦИЛИНДРОВОГО ПОРШНЕВОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ) | 2014 |
|
RU2563329C1 |
| КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ СО СДВОЕННЫМИ КИНЕМАТИЧЕСКИМИ СВЯЗЯМИ (ВАРИАНТЫ) | 2008 |
|
RU2382891C2 |
| МЕХАНИЗМ УРАВНОВЕШИВАНИЯ ШЕСТИЦИЛИНДРОВОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2010 |
|
RU2438025C2 |
| УСТРОЙСТВО ДЛЯ УРАВНОВЕШИВАНИЯ ПОРШНЕВОЙ МАШИНЫ | 1992 |
|
RU2018039C1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1993 |
|
RU2097571C1 |
| ПОРШНЕВАЯ МАШИНА (ЕЕ ВАРИАНТЫ) | 1994 |
|
RU2096638C1 |
| СПОСОБ ПОВЫШЕНИЯ УСТОЙЧИВОСТИ РАБОТЫ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2004 |
|
RU2267623C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ИЗМЕНЯЕМОЙ ТАКТНОСТИ | 1994 |
|
RU2090767C1 |
Изобретение может быть использовано в двигателях внутреннего сгорания. Устройство уравновешивания поршневого рядного двухцилиндрового четырёхтактного двигателя внутреннего сгорания осуществляется посредством группы противовесов, как минимум один из которых с дисбалансом M0r0 связан с коленчатым валом двигателем, а два других - с дисбалансами (2), (5) M1r1 и M2r2 – по одному на каждом из двух балансирных валов, кинематически связанных с коленчатым валом с возможностью вращения с идентичной ему угловой скоростью в противоположном с ним направлении. Балансирные валы размещены симметрично оси (7) коленчатого вала с заданным смещением «а» их осей по вертикали. Центры масс всех трёх противовесов расположены в плоскости, перпендикулярной оси (7) коленчатого вала и проходящей через его середину, так, чтобы положение центров масс противовесов балансирных валов соответствовало углу φ поворота кривошипа коленчатого вала. Величины смещения «а» и дисбалансов M1r1, M2r2 и M0r0 определены исходя из условия M1r1 + M2r2 = M0r0 и M0r0 = M⋅R, где R – радиус кривошипа коленчатого вала, М – возвратно-поступательно движущаяся масса кривошипно-шатунного механизма одного цилиндра двигателя. Противовесы балансирных валов выполнены с различными дисбалансами (M1r1 ≠ M2r2) и при этом достаточные для оптимального достижения уравновешивания реактивного крутящего момента соотношение величин этих дисбалансов. Величины смещения «а» осей валов определены по установленному путем моделирования по значениям массы возвратно-поступательно движущихся масс, радиуса кривошипа R, частоты вращения и значения крутящего момента двигателя за период 720°, результирующему импульсу опрокидывающего момента за этот период. Дисбаланс коленчатого вала M0r0 получен использованием «n» противовесов. Величины элементов определяются из условия:

 ,
,
где  – дисбалансы отдельных противовесов,
– дисбалансы отдельных противовесов,  – расстояние от центра масс указанных элементов до плоскости, перпендикулярной оси коленчатого вала и проходящей через его середину. Технический результат заключается в упрощении процесса реализации уравновешивания двухцилиндрового четырехтактного двигателя. 1 ил.
– расстояние от центра масс указанных элементов до плоскости, перпендикулярной оси коленчатого вала и проходящей через его середину. Технический результат заключается в упрощении процесса реализации уравновешивания двухцилиндрового четырехтактного двигателя. 1 ил.
Устройство уравновешивания поршневого рядного двухцилиндрового четырёхтактного двигателя внутреннего сгорания посредством группы противовесов, как минимум один из которых с дисбалансом M0r0 связан с коленчатым валом двигателем, а два других: с дисбалансами M1r1 и M2r2 – по одному на каждом из двух балансирных валов, кинематически связанных с коленчатым валом с возможностью вращения с идентичной ему угловой скоростью в противоположном с ним направлении, при этом балансирные валы размещены симметрично оси коленчатого вала с заданным смещением «а» их осей по вертикали, центры масс всех трёх противовесов расположены в плоскости, перпендикулярной оси коленчатого вала и проходящей через его середину, причем так, чтобы положение центров масс противовесов балансирных валов соответствовало углу φ поворота кривошипа коленчатого вала, и величины смещения «а» и дисбалансов M1r1, M2r2 и M0r0 определены, исходя из условия: M1r1 + M2r2 = M0r0 и M0r0 = M⋅R, где: R – радиус кривошипа коленчатого вала, М – возвратно-поступательно движущаяся масса кривошипно-шатунного механизма одного цилиндра двигателя, отличающееся тем, что противовесы балансирных валов выполнены с различными дисбалансами (M1r1 ≠ M2r2) и при этом достаточные для оптимального достижения уравновешивания реактивного крутящего момента соотношение величин этих дисбалансов и величины смещения «а» осей валов определены по установленному путем моделирования по значениям массы возвратно-поступательно движущихся масс, радиуса кривошипа R, частоты вращения и значения крутящего момента двигателя за период 720°, результирующему импульсу опрокидывающего момента за этот период, а упомянутый дисбаланс коленчатого вала M0r0 получен использованием «n» противовесов, при этом величины элементов определяются из условия: 
 , где
, где  - дисбалансы отдельных противовесов,
- дисбалансы отдельных противовесов,  – расстояние от центра масс указанных элементов до плоскости, перпендикулярной оси коленчатого вала и проходящей через его середину.
– расстояние от центра масс указанных элементов до плоскости, перпендикулярной оси коленчатого вала и проходящей через его середину.
| Л.Х | |||
| БОРОДЯНСКИЙ, Уравновешивание сил инерции первого порядка малоразмерного двигателя, журнал "Автомобильная промышленность", N 10, 1994, стр.20-23, рис 1б | |||
| Система балансировочных валов для двухцилиндрового четырехтактного двигателя (варианты) | 2021 |
|
RU2753431C1 |
| JP 2009281458 A, 03.12.2009 | |||
| JP 2012026408 A, 09.02.2012 | |||
| JP 2013002364 A, 07.01.2013. | |||

