Изобретение относится к двигателестроению, а именно к конструкциям устройств уравновешивания сил инерции и реактивного крутящего момента поршневых рядных двухцилиндровых четырёхтактных двигателей внутреннего сгорания (ДВС).
В настоящее время для этой цели применяют уравновешивающие устройства, включающие противовесы, расположенные на коленчатом и двух или одном балансирном вале с параллельно расположенными осями. Балансирные валы кинематически связаны с коленчатым, вращаются с той же угловой скоростью в противоположном ему направлении. Положение центров масс противовесов и их величина определяется из условия полного уравновешивания сил инерции возвратно-поступательно движущихся масс (ВПДМ) кривошипно–шатунного механизма (КШМ) 1-го порядка и частично реактивного крутящего момента (РКМ).
Известно двухвальное устройство уравновешивания ДВС, японской фирмы «Дайхатцу», описанное в статье Бородянского Л.Х. «Уравновешивание сил инерции первого порядка малоразмерного ДВС», журнал «Автомобильная промышленность», №10, 1994, рис.1б, с.20, в котором уравновешивание осуществляется тремя дисбалансами, один из которых расположен на коленчатом вале, а другие на двух соосно с ним установленных балансирных валах (по одному на каждом). Дисбалансы противовесов подбирают из условия полного уравновешивания сил инерции 1-го порядка ВПДМ, их значения определяются из условия: M1r1=M2r2=0,5M0r0; M0r0=M×R, где R –радиус кривошипа коленчатого вала; М – ВПДМ кривошипно-шатунного механизма ДВС (одного цилиндра); M1r1, M2r2, M0r0 – дисбалансы на обоих балансирных валах и коленчатом вале соответственно. Центры масс всех трёх противовесов располагают в плоскости, проходящей через середину коленчатого вала перпендикулярно его оси. Оба балансирных вала приводятся шестерённым приводом непосредственно от коленчатого, так что вращаются в противоположном ему направлении и с той же угловой скоростью.
Недостатком конструкции прототипа является сложность реализации точных значений оптимальных, по уравновешенности от РКМ, положений осей балансирных валов тремя шестернями, имеющими одинаковые диаметры начальных окружностей и число зубьев. Кроме того, такое уравновешивающее устройство в целом достаточно громоздко.
Более компактными являются одновальные уравновешивающие устройства. На конструкцию уравновешивающего устройства с одним балансирным валом, расположенным строго вертикально под осью коленчатого выдан патент RU 2097571, 27.11.1997. Балансирный вал вращается с той же угловой скоростью, что и коленчатый в противоположном направлении. За счёт установки противовесов с необходимыми значениями дисбалансов обеспечивается полное уравновешивание сил инерции возвратно поступательно движущихся масс (ВПДМ) 1-го порядка и частичное уравновешивание РКМ.
Недостатком является невозможность обеспечения оптимального уравновешивания РКМ при однозначно заданном положении оси балансирного вала (отсутствие горизонтального смещения) и ограничениях координат его расположения (балансирный вал должен находиться вне траектории вращающихся элементов кривошипно-шатунного механизма (КШМ)). Для выполнения условий оптимального уравновешивания РКМ требуется обеспечение специально определяемых смещений оси балансирного вала относительно коленчатого, как по вертикали, так и по горизонтали.
Наиболее близким аналогом (прототипом) изобретения является устройство уравновешивания ДВС с одним балансирным валом, применяемое на двухцилиндровом четырехтактном двигателе Fiat 500 Twin Air (дата публикации видео на видеохостинге YouTube 07.07.2010, https://otoba.ru/dvigatel/fiat/312a2000.html). Как видно из рисунка, приведенного в статье, а также в опубликованном видео, балансирный вал этого автомобильного двигателя имеет шестерённый привод, размещённый со стороны хвостовика коленчатого вала. Ось балансирного вала параллельна коленчатому, и он вращается с той же угловой скоростью в противоположном направлении. Полное уравновешивание сил инерции 1-го порядка ВПДМ и частичное РКМ обеспечивается за счёт центробежных сил от дисбалансов двух групп противовесов, установленных на коленчатом (Mкrк) и балансирном (Mбrб) валах. Здесь значения дисбалансов противовесов определены из условия: Mбrб = Mкrк= M×R, где М – ВПДМ кривошипно-шатунного механизма, R – радиус кривошипа коленчатого вала. Ось балансирного вала смещена по вертикали и горизонтали относительно коленчатого. Как показал специальный анализ (Гусаров В.В., Апелинский Д.В. Новые возможности уравновешивания ДВС типа R2, Журнал «Известия МГТУ «МАМИ», Технические и естественные науки», №1, (43), 2020, с.42-49), в этом случае необходимо обеспечивать строго задаваемое, находимое расчётом, положение оси балансирного вала относительно оси коленчатого вала, соответствующее максимально возможному частичному уравновешиванию РКМ. В анализе отмечено, что недостаток этого устройства заключается в том, что «хотя этот способ существенно упрощает механизм уравновешивания (необходим только один балансирный вал), однако зачастую может оказаться неприемлемым по конструктивным соображениям. Ось балансирного вала должна находиться вне траекторий крайних точек кривошипно-шатунного механизма и цилиндров ДВС, а при малых оптимальных смещениях это невыполнимо».
Задача заявленного технического решения заключалась в разработке уравновешивающего устройства, обеспечивающего полное уравновешивание сил инерции 1-го порядка от ВПДМ и точную реализацию оптимальных условий частичного уравновешивания реактивного крутящего момента в рядном четырёхтактном двухцилиндровом ДВС при малых значениях оптимальных смещений, которые по компоновочным условиям, указанным выше, невозможно реализовать в устройстве уравновешивания с одним балансирным валом.
Технический результат, получаемый при реализации решения, заключается в обеспечении уравновешивания сил инерции 1-го порядка от ВПДМ и точной реализации оптимального частичного уравновешивания реактивного крутящего момента без применения балансирного вала, а только с помощью противовесов, которые располагают на определённым образом разнесённых, не связанных напрямую между собой дисках двух шестерён, приводимых шестернями коленчатого вала, установленными в его передней и задней части. Кроме того, предлагаемое устройство уравновешивания компактнее существующих за счёт того, что здесь отсутствуют балансирные валы.
Заявленный технический результат достигается тем, что в предлагаемом устройстве отсутствуют балансирные валы и уравновешивание поршневого рядного двухцилиндрового четырехтактного двигателя внутреннего сгорания обеспечивается посредством группы противовесов, как минимум один из которых с дисбалансом mкrк размещен на коленчатом валу двигателя, а два других: с дисбалансами mб1rб1 и mб2rб2 – на дисках двух, не связанных напрямую между собой шестерён, приводимых от коленчатого вала, вращающихся с той же угловой скоростью в противоположном с ним направлении, оси которых параллельны коленчатому валу и смещены относительно него на заданные величины «а» по вертикали и «b» по горизонтали, определённые путем моделирования - численным методом нахождения экстремума (минимума) в программе Microsoft Excel с использованием команды «Поиск решений» панели инструментов программы. Исходными данными являются вышеуказанные значения массы М, радиуса кривошипа R, частоты вращения и значения крутящего момента ДВС от одного цилиндра за период (720°), который вводят либо в виде дискретных (табличных) данных, например, по результатам экспериментальных исследований, либо в виде аналитических зависимостей. В этом анализе целевой функцией является импульс результирующего опрокидывающего момента относительно среднего за период (360°), определяемыми переменными – оптимальные значения смещений «а» и «b», соответствующие минимуму импульса. Положение центров масс всех противовесов должно соответствовать углу φ - поворота кривошипа коленчатого вала. Одна шестерня приводится от передней части коленчатого вала (носка), другая от задней (хвостовика). Дисбаланс коленчатого вала mкrк выполнен суммарным, реализуемым путем установки на щеках коленчатого вала и связанных с ним деталей: шкиве и маховике и получен использованием «n» отдельных противовесов целесообразной по конструктивным соображениям формы, величины которых определяются из условия:
 ,
,  ,
,
где miri – дисбалансы отдельных противовесов, xi – расстояние от центра масс указанных противовесов до плоскости, перпендикулярной оси коленчатого вала, проходящей через его середину (соответствует середине расстояния между осями цилиндров). Соотношение значений дисбалансов mб1rб1 и mб2rб2 таково, что их общий центр масс также находится в той же плоскости, что соответствует условию:
mб1rб1х1 = mб2rб2х2,
где х1 и х2 - расстояния от центров масс противовесов до этой плоскости. Значения дисбалансов определены, исходя из весогабаритных параметров конкретного уравновешиваемого двигателя из условий:
mб1rб1 + mб2rб2 = mкrк и mкrк = M×R,
где: R – радиус кривошипа коленчатого вала, М – значения возвратно-поступательно движущейся массы кривошипно-шатунного механизма одного цилиндра двигателя. Диаметры начальных окружностей шестерён dн.о и положение осей приводных шестерён относительно оси коленчатого вала определяются из условия: dн.о.=(a2+b2)0.5, где «а» соответствует вертикальному смещению осей, «b» горизонтальному. Таким образом, все шестерни имеют одинаковый диаметр, а обе приводные шестерни, на дисках которых расположены противовесы, соосны. Значения смещений осей приводных шестерён относительно оси коленчатого вала определяют специальным расчётом из условия оптимального – максимально возможного частичного уравновешивания РКМ. При этом обеспечивается оптимальное уравновешивание для ДВС рассматриваемого типа при таких весогабаритных параметрах и режимах работы, когда при малых значениях оптимальных смещений «а» и «b» невозможно расположить ось балансирного вала вне траектории вращающихся элементов КШМ.
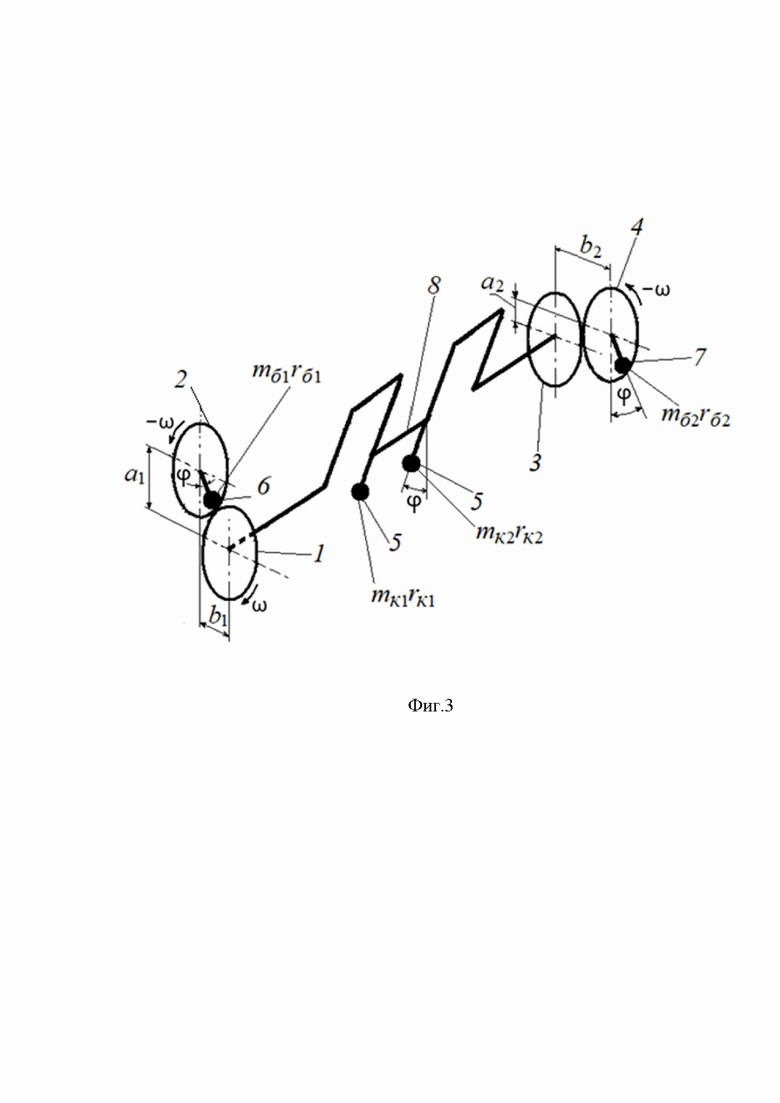
Во втором варианте предлагаемого устройства приводные шестерни с противовесами (одна из которых установлена у носка, другая у хвостовика коленчатого вала) имеют разные диаметры (одинаковые со своими ведущими шестернями) и разные смещения относительно оси коленчатого вала: а1, b1 у передней и а2, b2 у задней. В этом случае они несоосны относительно друг друга. Для обеспечения оптимального уравновешивания (аналогичного вышеизложенному) значения горизонтальных и вертикальных смещений осей приводных шестерён должны удовлетворять условиям:
a1=a+Δa1; b1=b+Δ b1; a2=a+Δa2; b2=b+Δb2; Δa2=-Δa1×k; Δb2=- Δb1×k,
где Δa1, Δb1, Δa2, Δb2 - изменение смещений положения осей приводных шестерён относительно оптимальных «а» и «b», коэффициент k = mб1rб1/mб2rб2. В таком варианте можно варьировать положениями осей приводных шестерён (с учётом выполнения указанных условий), что в некоторых случаях позволит облегчить задачу компоновки уравновешивающего устройства.
Изобретение поясняется следующими чертежами:
фиг.1 - схема предлагаемой конструкции уравновешивающего устройства при соосном расположении шестерён с уравновешивающими дисбалансами;
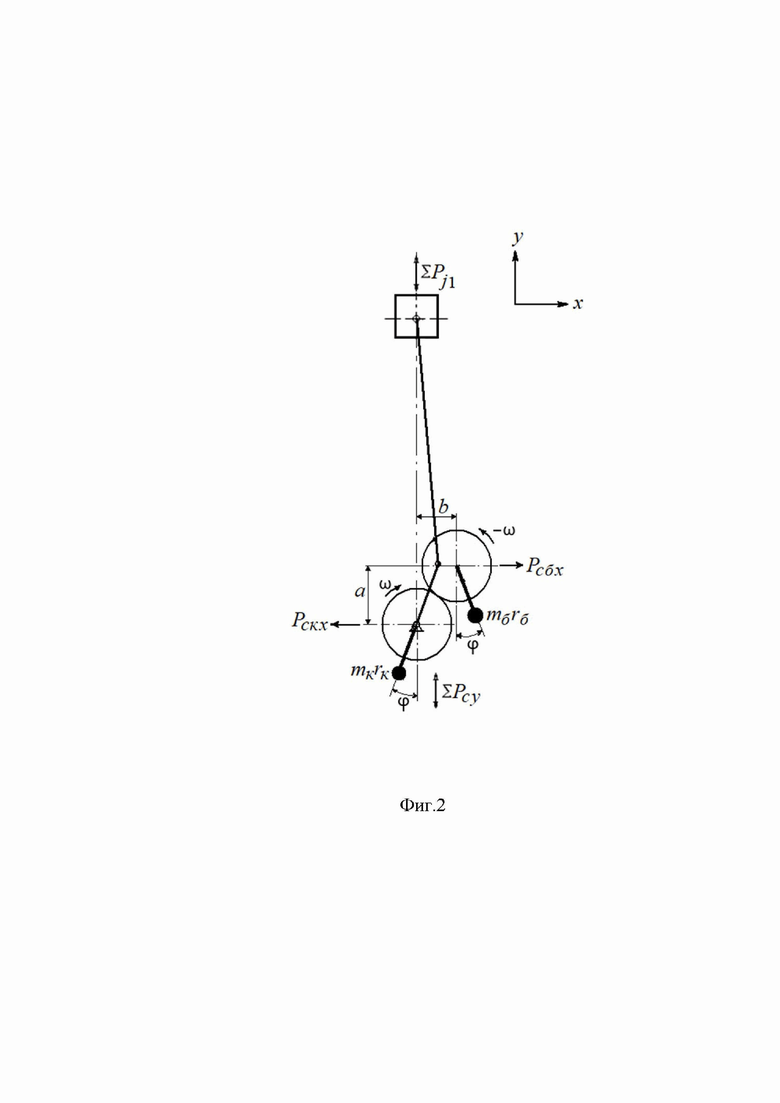
фиг.2 – схема действия результирующих инерционных сил;
фиг.3 – схема предлагаемой конструкции уравновешивающего устройства при несоосном расположении шестерён с уравновешивающими дисбалансами.
На фиг.1 показаны шестерни коленчатого вала (1, 3) от которых осуществляется привод шестерён (2, 4) с установленными на их дисках дисбалансами (6, 7). Шестерни имеют одинаковые диаметры, соответствующие условию обеспечения задаваемых значений вертикальных «а» и горизонтальных «b» смещений их осей. При этом реализуются одинаковые угловые скорости вращения в противоположных направлениях ведущих и ведомых шестерён (±ω). Дисбалансы коленчатого вала (5) и приводных шестерён (6, 7) установлены таким образом, что общий центр дисбалансов каждой группы расположен в плоскости, проходящей через середину коленчатого вала (8) перпендикулярной его оси.
На фиг.2 показаны линии действия результирующих инерционных сил, в рассматриваемом ДВС оборудованном предлагаемым уравновешивающим устройством: возмущающая вертикальная результирующая сила инерции 1-го порядка от ВПДМ ΣPj1; уравновешивающая её вертикальная составляющая центробежной силы от действия всех противовесов, установленных на коленчатом валу и дисках шестерён ΣРсу; горизонтальные составляющие центробежных сил от противовесов, установленных на дисках шестерён ΣРсбх и на коленчатом валу ΣРскх. С учётом вышеизложенных условий установки противовесов все показанные результирующие инерционные силы расположены в одной плоскости, проходящей через середину коленчатого вала перпендикулярно его оси.
На фиг.3 показан вариант конструкции уравновешивающего устройства при несоосном расположении приводных шестерён (2, 4) с противовесами (6, 7). Положение осей этих шестерён и их диаметры определяются координатами а1, b1, а2, b2, находимых как показано выше. При этом результирующие сил инерции противовесов будут располагаться в плоскости, проходящей через середину коленчатого вала перпендикулярной его оси и действовать аналогично, как и для варианта соосного расположения приводных шестерён, показанного на фиг.2. При работе ДВС коленчатый вал вращается с угловой скоростью ω, а приводные шестерни с такой же скоростью в противоположном направлении -ω. От дисбалансов 5, 6, 7 возникают центробежные силы, которые приложены к их осям. Анализ этих сил, выполняемый с их разложением на вертикальные и горизонтальные составляющие показывает, что для принятых значений дисбалансов обеспечивается полное уравновешивание вертикальной результирующей силы инерции 1-го порядка от ВПДМ:
(mб1rб1 + mб2rб2)×ω2 ×cosϕ + mкrк×ω2 ×cosϕ = 2M×R × ω2 × cosϕ, т.е. ΣРсу = ΣPj1,
а результирующая горизонтальных центробежных сил равна нулю:
(mб1rб1 + mб2rб2)×ω2×sinϕ + mкrк×ω2×sinϕ = 0, т.е. ΣРсбх =-ΣРскх (фиг.2).
В то же время из-за вертикального и горизонтального (размеры «а» и «b») смещения осей приводных шестерён возникает гармонический момент Мпр от центробежных сил противовесов и сил инерции ВПДМ ДВС:
Мпр = (mб1rб1 + mб2rб2) ω2×(а×sinϕ+b×cosϕ)
Этот момент действует в той же плоскости, что и реактивный крутящий момент (РКМ) Мр, складывается с ним и обеспечивает его уравновешивание (уменьшает возмущающее действие). Существуют специальные программы по определению оптимальных значений указанных смещений, обеспечивающих максимально возможное частичное уравновешивание РКМ с учётом конкретных весогабаритных параметров ДВС и режимов его работы (Гусаров В.В., Апелинский Д.В. «Новые возможности уравновешивания ДВС типа R2», Журнал «Известия МГТУ «МАМИ», Технические и естественные науки», №1(43), 2020, с.42-49).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство уравновешивания поршневого рядного двухцилиндрового четырехтактного двигателя внутреннего сгорания | 2022 |
|
RU2785026C1 |
| Силовой агрегат | 2023 |
|
RU2826661C1 |
| КОНСТРУКЦИЯ ПЯТИЦИЛИНДРОВОГО ПОРШНЕВОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ (ВАРИАНТЫ) | 2014 |
|
RU2563329C1 |
| УСТРОЙСТВО ДЛЯ УРАВНОВЕШИВАНИЯ ПОРШНЕВОЙ МАШИНЫ | 1992 |
|
RU2018039C1 |
| МЕХАНИЗМ ДЛЯ УРАВНОВЕШИВАНИЯ СИЛ ИНЕРЦИИ И МОМЕНТОВ ИНЕРЦИИ ВТОРОГО ПОРЯДКА | 1991 |
|
RU2037693C1 |
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1993 |
|
RU2097571C1 |
| ПОРШНЕВАЯ МАШИНА (ЕЕ ВАРИАНТЫ) | 1994 |
|
RU2096638C1 |
| УСТРОЙСТВО ДЛЯ УРАВНОВЕШИВАНИЯ ПОРШНЕВОЙ МАШИНЫ | 1992 |
|
RU2019757C1 |
| Устройство для уравновешивания двигателя внутреннего сгорания | 1987 |
|
SU1467288A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ИЗМЕНЯЕМОЙ ТАКТНОСТИ | 1994 |
|
RU2090767C1 |

Изобретение может быть использовано в двигателестроении. Устройство уравновешивания предназначено для поршневого рядного двухцилиндрового четырёхтактного двигателя внутреннего сгорания посредством группы противовесов. В устройстве отсутствуют балансирные валы. Как минимум один из противовесов (5) с дисбалансом mкrк размещен на коленчатом валу двигателя. Два других противовеса (6), (7) с дисбалансами mб1rб1 и mб2rб2 – на дисках двух не связанных напрямую между собой шестерён (2), (4), приводимых от коленчатого вала (8), вращающихся с той же угловой скоростью в противоположном с ним направлении. Оси шестерён (2), (4) параллельны коленчатому валу (8) и смещены относительно него на заданные величины «а» по вертикали и «b» по горизонтали. Величины «а» и «b» определены путем моделирования по значениям возвратно-поступательно движущейся массы, радиуса кривошипа коленчатого вала (8) R, частоты вращения и результирующего импульса опрокидывающего момента за период 360°. Положение центров масс всех противовесов соответствует углу ϕ поворота кривошипа коленчатого вала (8). Дисбаланс коленчатого вала (8) mкrк получен использованием «n» отдельных противовесов, величины которых определяются из условия: 
 где miri – дисбалансы отдельных противовесов, xi – расстояние от центра масс указанных противовесов до плоскости, перпендикулярной оси коленчатого вала, проходящей через середину расстояния между осями цилиндров. Соотношение значений дисбалансов (6) и (7) mб1rб1 и mб2rб2 таково, что их общий центр масс также находится в той же плоскости, что соответствует условию: mб1rб1х1 = mб2rб2х2, где х1 и х2 - расстояния от центров масс противовесов до этой плоскости. Значения дисбалансов определяют исходя из весогабаритных параметров конкретного уравновешиваемого двигателя из условий: mб1rб1 + mб2rб2 = mкrк и mкrк = M×R, где: R – радиус кривошипа коленчатого вала (8), М – значения возвратно-поступательно движущейся массы кривошипно-шатунного механизма одного цилиндра двигателя. Технический результат заключается в обеспечении уравновешивания сил инерции 1-го порядка от возвратно–поступательно движущихся масс и точной реализации оптимального частичного уравновешивания реактивного крутящего момента. 1 з.п. ф-лы, 3 ил.
где miri – дисбалансы отдельных противовесов, xi – расстояние от центра масс указанных противовесов до плоскости, перпендикулярной оси коленчатого вала, проходящей через середину расстояния между осями цилиндров. Соотношение значений дисбалансов (6) и (7) mб1rб1 и mб2rб2 таково, что их общий центр масс также находится в той же плоскости, что соответствует условию: mб1rб1х1 = mб2rб2х2, где х1 и х2 - расстояния от центров масс противовесов до этой плоскости. Значения дисбалансов определяют исходя из весогабаритных параметров конкретного уравновешиваемого двигателя из условий: mб1rб1 + mб2rб2 = mкrк и mкrк = M×R, где: R – радиус кривошипа коленчатого вала (8), М – значения возвратно-поступательно движущейся массы кривошипно-шатунного механизма одного цилиндра двигателя. Технический результат заключается в обеспечении уравновешивания сил инерции 1-го порядка от возвратно–поступательно движущихся масс и точной реализации оптимального частичного уравновешивания реактивного крутящего момента. 1 з.п. ф-лы, 3 ил.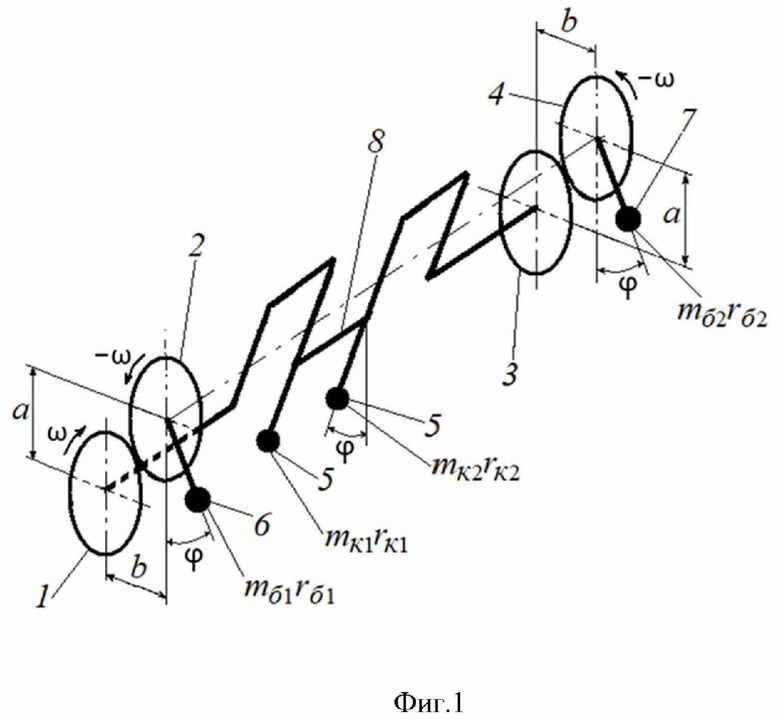
1. Устройство уравновешивания поршневого рядного двухцилиндрового четырёхтактного двигателя внутреннего сгорания посредством группы противовесов, отличающееся тем, что отсутствуют балансирные валы и как минимум один из противовесов с дисбалансом mкrк размещен на коленчатом валу двигателя, а два других: с дисбалансами mб1rб1 и mб2rб2 – на дисках двух не связанных напрямую между собой шестерён, приводимых от коленчатого вала, вращающихся с той же угловой скоростью в противоположном с ним направлении, оси которых параллельны коленчатому валу и смещены относительно него на заданные величины «а» по вертикали и «b» по горизонтали, определённые путем моделирования по значениям возвратно-поступательно движущейся массы, радиуса кривошипа коленчатого вала R, частоты вращения и результирующего импульса опрокидывающего момента за период (360°), причем положение центров масс всех противовесов соответствует углу ϕ - поворота кривошипа коленчатого вала, а дисбаланс коленчатого вала mкrк получен использованием «n» отдельных противовесов, величины которых определяются из условия: 
 где miri – дисбалансы отдельных противовесов, xi – расстояние от центра масс указанных противовесов до плоскости, перпендикулярной оси коленчатого вала, проходящей через середину расстояния между осями цилиндров, при этом соотношение значений дисбалансов mб1rб1 и mб2rб2 таково, что их общий центр масс также находится в той же плоскости, что соответствует условию: mб1rб1х1 = mб2rб2х2, где х1 и х2 - расстояния от центров масс противовесов до этой плоскости, значения дисбалансов определяют исходя из весогабаритных параметров конкретного уравновешиваемого двигателя из условий: mб1rб1 + mб2rб2 = mкrк и mкrк = M×R, где: R – радиус кривошипа коленчатого вала, М – значения возвратно-поступательно движущейся массы кривошипно-шатунного механизма одного цилиндра двигателя.
где miri – дисбалансы отдельных противовесов, xi – расстояние от центра масс указанных противовесов до плоскости, перпендикулярной оси коленчатого вала, проходящей через середину расстояния между осями цилиндров, при этом соотношение значений дисбалансов mб1rб1 и mб2rб2 таково, что их общий центр масс также находится в той же плоскости, что соответствует условию: mб1rб1х1 = mб2rб2х2, где х1 и х2 - расстояния от центров масс противовесов до этой плоскости, значения дисбалансов определяют исходя из весогабаритных параметров конкретного уравновешиваемого двигателя из условий: mб1rб1 + mб2rб2 = mкrк и mкrк = M×R, где: R – радиус кривошипа коленчатого вала, М – значения возвратно-поступательно движущейся массы кривошипно-шатунного механизма одного цилиндра двигателя.
2. Устройство уравновешивания поршневого рядного двухцилиндрового четырёхтактного двигателя внутреннего сгорания по п. 1, отличающееся тем, что оси обеих приводных шестерён установлены с разными смещениями относительно оси коленчатого вала - вертикальным а1 у одной шестерни, а2 у другой шестерни и горизонтальным соответственно b1 и b2, причём эти значения определяются по формулам: a1=a+Δa1; b1=b+Δb1; a2=a+Δa2; b2=b+Δb2; Δa2=-Δa1×k; Δb2=-Δb1×k, где Δa1, Δb1, Δa2, Δb2 - изменение смещений положения осей приводных шестерён относительно оптимальных «а» и «b», определённых путем моделирования, коэффициент k= mб1rб1/mб2rб2.
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1993 |
|
RU2097571C1 |
| Устройство уравновешивания поршневого рядного двухцилиндрового четырехтактного двигателя внутреннего сгорания | 2022 |
|
RU2785026C1 |
| Механизм для уравновешивания переменных сил поступательно- движущихся масс первого порядка в угловых поршневых машинах | 1979 |
|
SU783518A1 |
| EP 1983215 A1, 22.10.2008 | |||
| US 5044333 A, 03.09.1991. | |||

