Данное изобретение касается летательного аппарата с несущим винтом с электрическим приводом для приведения в действие несущего винта и/или хвостового винта этого летательного аппарата с несущим винтом согласно ограничительной части первого пункта формулы изобретения.
Далее, данное изобретение касается летательного аппарата с несущим винтом с гибридным приводом для приведения в действие несущего винта и/или хвостового винта этого летательного аппарата с несущим винтом, содержащим предлагаемый изобретением, электрический привод, а также второй привод, выполненный как термодинамическая силовая машина.
Из уровня техники известны так называемые многомоторные, в частности, двухмоторные вертолеты, т.е. вертолеты с силовой установкой, содержащей несколько двигателей, соответственно, приводов. Обычно топливо - большей частью ископаемые горючие вещества - с использованием одного или нескольких приводов, выполненных как термодинамическая силовая машина, преобразуется в механическую работу, и с помощью привода несущего винта, соответственно, привода винта вертолета приводится в действие несущий винт, соответственно, с помощью привода хвостового винта приводится в действие хвостовой винт.
В чрезвычайной ситуации в случае выхода из строя привода такого многомоторного вертолета, этот вертолет должен иметь возможность полагаться на мощность другого оставшегося двигателя в течение заданного времени, чтобы перевести вертолет в безопасный режим полета и среагировать на отказ двигателя.
Даже если и нет никакой чрезвычайной ситуации, многомоторный вертолет обладает тем преимуществом, что мощность другого двигателя во время полета может, например, гарантировать улучшенную несущую способность.
Особой формой таких двухмоторных вертолетов являются тоже известные из уровня техники вертолеты с гибридным приводом, причем помимо выполненного как термодинамическая силовая машина привода дополнительная механическая работа может совершаться посредством электрического привода, а также соответствующего источника электрической энергии. Такие вертолеты с гибридным приводом обладают дополнительным преимуществом безопасности по сравнению с двухмоторными вертолетами, имеющими только подачу ископаемого горючего, так как, например, при выходе из строя подачи ископаемого горючего они могут перейти на дополнительную подачу электроэнергии.
Далее, из US 2017/0225573 A1 известен гибридный привод с выполненным как термодинамическая силовая машина приводом, а также с электрическим приводом. Этот гибридный привод содержит главный привод, образованный термодинамической силовой машиной, а также вспомогательный привод, образованный электрическим приводом. Указанный главный привод содержит выполненный как термодинамическая силовая машина привод, привод несущего винта, соответственно, привод винта вертолета, приводную ветвь, соответственно, вал главного двигателя, а также вал несущего винта, соответственно, вал несущего винта вертолета. При этом главный привод механически соединен с валом главного двигателя, вследствие чего может приводиться во вращение вал главного двигателя. Далее, вал главного двигателя через привод несущего винта соединен с валом несущего винта, жестко соединенным с несущим винтом через привод несущего винта, таким образом, что этот несущий винт может приводиться во вращение.
Указанный вспомогательный привод содержит дополнительный источник электрической энергии, электрический привод, а также приводную ветвь, соответственно, относящийся к ней вал двигателя. Указанный источник электрической энергии поставляет необходимую энергию для электрического привода.
При этом согласно одному предложенному в US 2017/0225573 A1 варианту выполнения этот электрический привод через относящийся к нему вал двигателя может находиться в механическом взаимодействии с валом несущего винта, соответственно, с валом несущего винта вертолета, причем этот электрический привод и указанный вал двигателя установлены параллельно стойке несущего винта.
Известный из US 2017/0225573 A1 летательный аппарат с несущим винтом и с гибридным приводом имеет тот недостаток, что в результате имеет место большая необходимая площадь, сложная конструктивная схема, а также большая потребность в техническом обслуживании.
Из-за наличия вторых двигателей такие показанные, например, в US 2017/0225573 A1 гибридные приводы имеют лежащую в их основе проблему, состоящую в том, что вес такого летательного аппарата с несущим винтом негативно увеличивается по сравнению с одномоторными вариантами, однако, достигается более высокая степень надежности.
Данное изобретение ставит перед собой задачу создания летательного аппарата с несущим винтом с электрическим приводом, причем преодолеваются недостатки уровня техники и, в частности, сокращается необходимая площадь, упрощается конструктивная схема и снижается потребность в техническом обслуживании.
Еще одна задача, стоящая перед данным изобретением, заключается в том, чтобы предложить летательный аппарат с несущим винтом с гибридным приводом, содержащим электрический привод, причем указанные недостатки уровня техники устраняются за счет компактной и имеющей малый вес конструктивной схемы.
Указанную задачу решает летательный аппарат с несущим винтом с электрическим приводом с признаками пункта 1 формулы изобретения, соответственно, летательный аппарат с несущим винтом с гибридным приводом с признаками пункта 7 формулы изобретения.
Согласно изобретению, указанный электрический привод выполнен как кольцевой электродвигатель, причем этот кольцевой электродвигатель расположен и закреплен коаксиально стойке винта.
В смысле данного изобретения под электрическим кольцевым электродвигателем понимается так называемый моментный двигатель с полым валом. Таким образом, в случае такого типа кольцевого электродвигателя отказываются от расположенного по центру вала двигателя. Кольцевой электродвигатель, по существу, содержит кольцо, служащее статором, а также кольцо, служащее ротором, причем у такого кольцевого электродвигателя внешний ротор называется «внешним якорем», а внутренний ротор - «внутренним якорем».
Силовое действие у данного кольцевого электродвигателя возникает в воздушном зазоре, соответственно, в магнитном зазоре между ротором и статором.
Такие кольцевые электродвигатели в отличие от обычных электродвигателей с одним валом двигателя обладают тем преимуществом, что из-за большого приводного момента при низкой частоте вращения обеспечиваются большие ускорения. Поскольку, далее, не требуется никаких механических элементов, таких как зубчатый ремень и т.п., то за счет использования кольцевых электродвигателей можно получить компактную конструктивную схему. Иначе говоря, кольцевой электродвигатель может особенно компактно интегрироваться в существующую приводную систему летательного аппарата с несущим винтом. К тому же, такие кольцевые электродвигатели также за счет исключения механических элементов работают равномерно, с пониженной шумностью и не требуют трудоемкого обслуживания. Простое размещение такого кольцевого электродвигателя на стойке винта способствует, в частности, в связи с гибридным приводом получению компактной конструктивной схемы. В противоположность этому, показанный в US 2017/0225573 A1 гибридный привод имеет тот недостаток, что необходима дополнительная передача для ввода механической мощности раскрытого здесь электрического привода, вследствие чего имеет место бόльшая сложность из-за дополнительного вала и изменяющего направление передаточного механизма.
Под стойкой винта в смысле данного изобретения в случае хвостового винта понимается ступица хвостового винта, соответственно, в случае несущего винта понимается вал несущего винта вертолета.
Другие предпочтительные варианты выполнения охарактеризованы в зависимых пунктах формулы изобретения.
Согласно одному предпочтительному варианту выполнения указанный электрический привод может быть выполнен как кольцевой электродвигатель с работающим как ротор, в частности, кольцеобразным, внутренним якорем, причем этот внутренний якорь может быть жестко соединен со стойкой винта.
Преимуществом такого предпочтительного варианта выполнения является то, что за счет достигаемой прямой передачи силы от электрического привода, выполненного как кольцевой электродвигатель, на стойку винта можно отказаться от «коробки передач», соответственно, от передачи несущего винта.
В принципе, согласно одному альтернативному предпочтительному варианту выполнения возможно, что указанный электрический привод выполнен как кольцевой электродвигатель с работающим в качестве ротора, в частности, кольцеобразным, внешним якорем, причем этот внешний якорь может быть жестко соединен со стойкой винта. Преимущество такого варианта внешнего якоря состоит в еще более компактной конструктивной схеме, которая может выдавать еще больший крутящий момент. Высокая точность движения и плавность работы точно такие же, как и у внутреннего якоря.
Согласно одному следующему предпочтительному варианту выполнения указанный электрический привод выполнен как кольцевой электродвигатель с интегрированной передачей (редуктором) для передачи силы на стойку винта. Такая передача силы посредством интегрированной передачи обладает тем преимуществом, что может сохраняться наиболее эффективная частота вращения двигателя, которая, как правило, выше, чем частота вращения ротора. Далее, преимущество передачи силы посредством указанной интегрированной передачи заключается в том, что при достигаемом при этом понижении может создаваться особенно высокий крутящий момент, и можно получить еще более компактную конструктивную форму.
В принципе, возможны любые подходящие формы интегрированной передачи. Особенно предпочтительно, однако, выполнять электрический привод в виде кольцевого электродвигателя с интегрированной передачей, выполненной как планетарная передача.
Предпочтительно электрический привод может быть механически соединен по меньшей мере с корпусом вертолетной передачи (редуктора), в частности, за счет того, что работающее как статор внешнее кольцо электрического привода может быть жестко соединено с корпусом передачи.
Особенно предпочтительно, если электрический привод рассчитан таким образом и имеет такие размеры, что несущий винт и/или хвостовой винт летательного аппарата с несущим винтом, в частности вертолета, может приводиться в действие автономно, без дополнительного привода. В смысле данного изобретения под автономным электрическим приводом понимается, что может достигаться механическая мощность предпочтительно по меньшей мере 150 кВт, предпочтительнее от 200 кВт до 700 кВт, еще более предпочтительно от 300 кВт до 600 кВт, и особенно предпочтительно около 600 кВт. В качестве примера с помощью электрического привода механической мощностью около 600 кВт при низкой частоте вращения 371 об/мин можно достичь высокого крутящего момента ок. 15500 Нм.
Согласно одной предпочтительной возможной модификации данного изобретения коаксиально стойке винта может быть расположено и закреплено друг над другом несколько приводов, выполненных как кольцевые электродвигатели. Иначе говоря, несколько приводов, выполненных как кольцевые электродвигатели, могут быть расположены штабелем друг на друге. Такое использование нескольких штабелированных приводов вместо одного единственного кольцевого электродвигателя имеет то особое преимущество, что может быть получена модульная конструкция электрического привода, и различные ступени мощности могут быть технологически выработаны с низкими затратами. Высокая потребляемая мощность может за счет модульной конструкции распределяться на несколько ступеней с меньшей электрической мощностью, в результате чего благодаря получающейся большей поверхности физически и технологически возникает преимущество для отведения тепла рассеиваемой мощности от двигателя и устройства управления. Дополнительно распределенный на несколько ступеней, электрический привод еще лучше защищает от полного отказа второго привода, выполненного как термодинамическая силовая машина.
Благодаря этому предпочтительно может гарантироваться, что в случае экстренной ситуации в форме выхода из строя (отказа) второго привода, выполненного, например, как термодинамическая силовая машина многомоторного вертолета, на заданный промежуток времени можно положиться на мощность аварийного тока от остающегося электрического привода, чтобы привести вертолет в безопасный режим полета и отреагировать на выход из строя двигателя.
В принципе, предлагаемый изобретением летательный аппарат с несущим винтом может содержать лишь один автономный, выполненный как кольцевой электродвигатель и расположенный коаксиально стойке винта электрический привод. Однако, другой аспект данного изобретения касается летательного аппарата с несущим винтом с гибридным приводом, содержащим предлагаемый изобретением, электрический привод, а также второй привод, выполненный как термодинамическая силовая машина, например, двигатель внутреннего сгорания, турбинный двигатель, двигатель с принудительным зажиганием, дизельный двигатель, привод на топливных элементах или т.п.
Предпочтительно у такого гибридного привода указанный электрический привод может быть связан со вторым приводом, выполненным как термодинамическая силовая машина, так что этот электрический привод в связанном состоянии может вращаться вместе с вторым приводом, и благодаря этому электрический привод может поддерживать второй привод при приведении в действие несущего винта и/или хвостового винта, и, соответственно, наоборот. В смысле данного изобретения такого рода гибридный привод может рассматриваться как выполненный параллельным гибридный привод.
В принципе, стойка винта предлагаемого изобретением летательного аппарата с несущим винтом может быть выполнена цельной. Предпочтительно стойка винта предлагаемого изобретением летательного аппарата с несущим винтом выполнена сборной из двух частей и содержит опорную стойку, а также внешнюю стойку, причем внешняя стойка выполнена как полое тело, которое установлено с возможностью вращения вокруг центральной оси относительно опорной стойки, концентрично окружая опорную стойку, и причем эта внешняя стойка может кинематически взаимодействовать с вертолетной передачей, причем опорная стойка может быть установлена в летательном аппарате с несущим винтом фиксировано по месту и без возможности проворачивания, так что внешняя стойка может без возможности проворачивания соединяться с несущим винтом и приводиться во вращение передачей винта вертолета. В связи с возможным вариантом с внешним якорем, например, внутреннее кольцо, работающее в качестве статора, могло бы быть закреплено на опорной стойке без возможности проворачивания, тогда как работающий как ротор, кольцеобразный внешний якорь закреплен на внешней стойке. Согласно другой предпочтительной возможной модификации данного изобретения и при таком варианте с внешним якорем несколько приводов, выполненных как кольцевые электродвигатели, могут быть установлены и закреплены коаксиально стойке винта друг над другом (т.е. штабелированы друг на друге) с упомянутыми преимуществами штабелированного вместо одного единственного кольцевого электродвигателя, т.е. может быть получена модульная конструкция, обеспечивающая простое достижение различных ступеней мощности, распределение большой потребляемой мощности на несколько ступеней с более низкой мощностью. Согласно следующей предпочтительной модификации, при таком варианте с внешним якорем со штабелированными друг на друге кольцевыми электродвигателями эти кольцевые электродвигатели могут выполняться с интегрированной передачей, выполненной как планетарная передача.
Предпочтительно в случае передачи винта вертолета предлагаемого изобретением летательного аппарата с несущим винтом стойка винта может без возможности проворачивания соединяться с выполненным как ведущая шестерня приводным узлом, причем эта ведущая шестерня установлена на опорной стойке с возможностью вращения с помощью по меньшей мере одной радиальной опоры, и посредством солнечного колеса, соединенного с ведущей шестерней без возможности проворачивания, может обеспечиваться вращение по меньшей мере одного приводного планетарного колеса на обращенной к ведущей шестерне стороне соответствующего водила планетарной передачи вокруг соответствующей оси планетарного колеса, и причем по меньшей мере одно, относящееся к этому по меньшей мере одному приводному планетарному колесу, установленное фиксировано по месту планетарное колесо окружено установленной с возможностью вращения вокруг центральной оси, снабженной внутренними зубьями коронной шестерней, и между коронной шестерней и внешней стойкой может быть размещено или сформировано устройство, передающее усилие, таким образом, что, исходя из вращательного движения ведущей шестерни, может приводиться во вращение внешняя стойка и несущий винт, связанный с этой внешней стойкой без возможности проворачивания.
В принципе, однако, возможно также, что в случае передачи винта вертолета предлагаемого изобретением летательного аппарата с несущим винтом использовалась планетарная передача с не фиксированными по месту планетарными колесами. При этом планетарная передача имеет несколько снабженных внешними зубьями планетарных колес, которые установлены на относящихся к ним водилах планетарной передачи. Эти планетарные колеса установлены в фиксированной по месту коронной шестерне с возможностью вращения, что обусловлено конструкцией. При этом указанные не фиксированные по месту планетарные колеса вращаются вокруг своих планетарных осей и внутри коронной шестерни вокруг центральной оси ротора. Вращение планетарных колес осуществляется посредством вращательного привода центрального солнечного колеса, которое тоже фиксировано по месту, но установлено с возможностью вращения вокруг центральной оси ротора. Привод вращает центральное солнечное колесо, так что это вращательное движение через солнечное колесо и планетарные колеса передается на стойку винта.
В связи с такого рода выполнением передачи винта вертолета предпочтительно за определенное время может быть полностью скомпенсирован полный отказ (выход из строя) ветви главного привода (главной трансмиссии), чтобы обеспечить безопасное приземление.
Кроме того, может непосредственно быстро использоваться имеющаяся в распоряжении дополнительная мощность для разгрузки, соответственно, для поддержки привода, выполненного как термодинамическая силовая машина. Возможными преимуществами вследствие этого могли бы быть сокращенное время простоя привода, выполненного как термодинамическая силовая машина, например, проявившееся в экономии расходов на обслуживание, и улучшенная эффективность привода, например, проявляющаяся в снижении потребления ископаемого горючего, при максимально простой и компактной конструкции силовой установки.
Ниже один предпочтительный пример выполнения предмета изобретения будет описан в связи с прилагаемыми чертежами. Показано:
Фиг.1 вид в перспективе одного предпочтительного варианта выполнения предлагаемого изобретением летательного аппарата с несущим винтом с гибридным приводом;
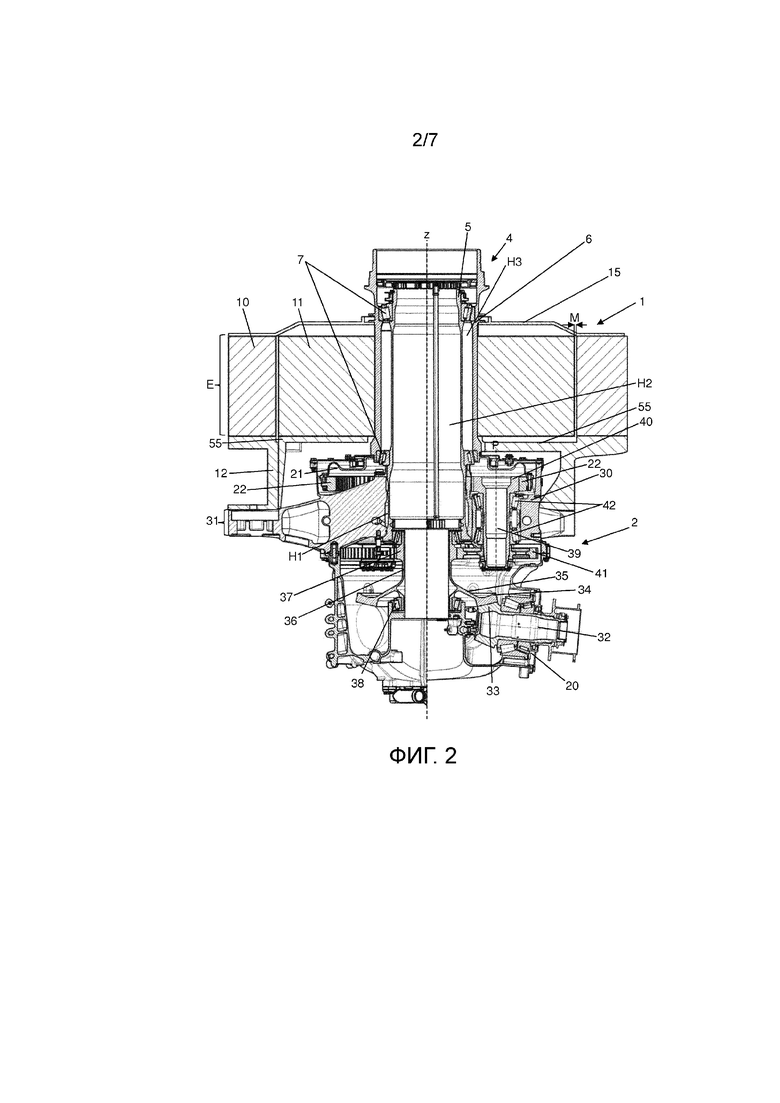
Фиг.2 продольное сечение указанного предпочтительного варианта выполнения предлагаемого изобретением летательного аппарата с несущим винтом с гибридным приводом;
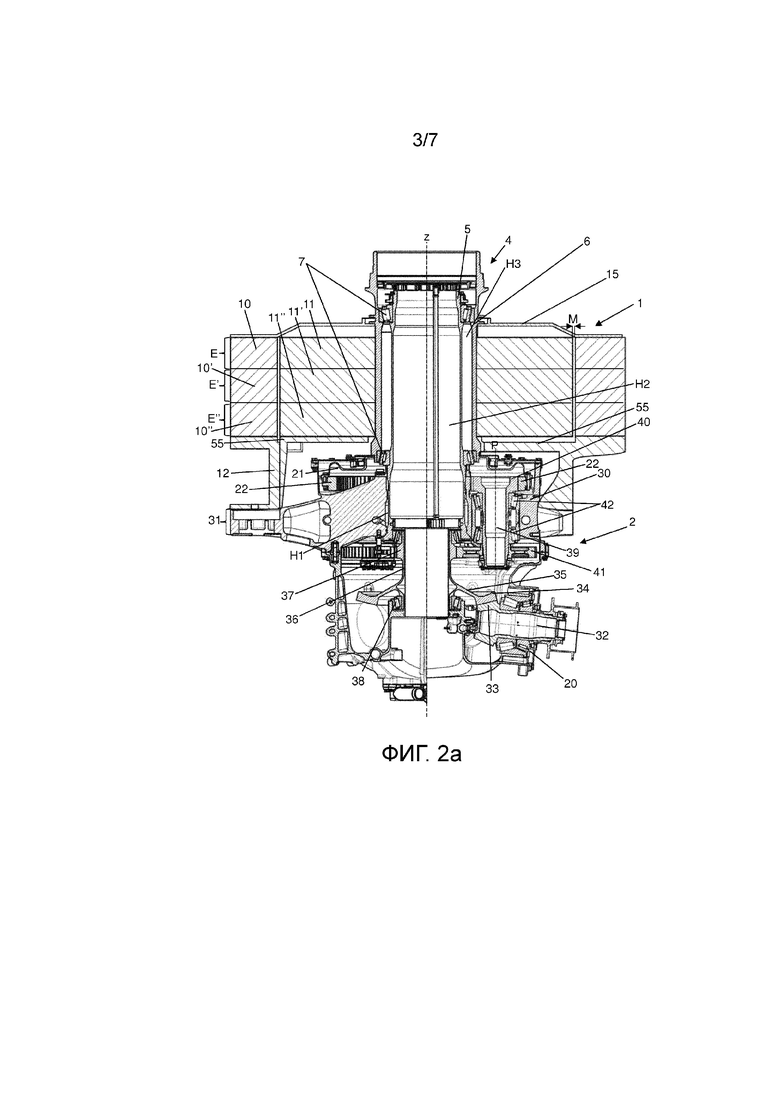
Фиг.2a продольное сечение другого предпочтительного варианта выполнения предлагаемого изобретением летательного аппарата с несущим винтом с гибридным приводом, причем несколько кольцевых электродвигателей штабелированы друг на друге;
Фиг.3 продольное сечение упомянутого предпочтительного варианта выполнения предлагаемого изобретением летательного аппарата с несущим винтом с гибридным приводом, причем электрический привод выполнен как кольцевой электродвигатель с интегрированной передачей (редуктором), выполненной как планетарная передача;
Фиг.3a продольное сечение другого предпочтительного варианта выполнения предлагаемого изобретением летательного аппарата с несущим винтом с гибридным приводом и несколькими электрическими, штабелированными друг на друге кольцевыми электродвигателями, причем эти кольцевые электродвигатели выполнены с интегрированной передачей, выполненной как планетарная передача;
Фиг.4 блок-схема устройства управления приводной мощностью согласно указанному предпочтительному варианту выполнения предлагаемого изобретением летательного аппарата с несущим винтом с выполненным здесь параллельным гибридным приводом;
Фиг.5 блок-схема устройства управления приводной мощностью согласно другому предпочтительному варианту выполнения предлагаемого изобретением летательного аппарата с несущим винтом с выполненным здесь последовательным гибридным приводом.
На Фиг.1 показан вид в перспективе одного предпочтительного варианта выполнения предлагаемого изобретением летательного аппарата с несущим винтом с гибридным приводом 1. Как подробно показано на Фиг.2, представленный здесь электрический привод E механически соединен по меньшей мере с корпусом 30 передачи (редуктора) винта вертолета, соответственно, передачи 2 несущего винта за счет того, что работающее как статор внешнее кольцо 10 электрического привода E посредством здесь четырех первых крепежных консолей 12 внешнего кольца 10 жестко соединено с здесь четырьмя корреспондирующими, вторыми крепежными консолями 31 корпуса 30 передачи.
На Фиг.2 показано продольное сечение этого предпочтительного варианта выполнения предлагаемого изобретением летательного аппарата с несущим винтом с гибридным приводом 1.
Показанный здесь гибридный привод 1 содержит электрический привод E, а также не показанный здесь, второй, выполненный как термодинамическая силовая машина привод TK, например, двигатель внутреннего сгорания, турбинный двигатель, двигатель с принудительным зажиганием, дизельный двигатель, привод на топливных элементах или т.п.
Показанный на Фиг.2, выполненная сборной из двух частей стойка 4 винта содержит опорную стойку 5, а также выполненную как полое тело внешнюю стойку 6 с полостью H3, причем внешняя стойка 6 окружает опорную стойку 5 концентрично центральной оси z.
Электрический привод E выполнен как кольцевой электродвигатель, причем этот кольцевой электродвигатель расположен и закреплен коаксиально стойке 4 винта, в частности, коаксиально центральной оси z, проходящей вдоль стойки винта, соответственно, стойки 4 несущего винта. Далее, показанный здесь кольцевой электродвигатель выполнен с работающим как ротор, кольцеобразным (т.е. образующим внутреннее кольцо) внутренним якорем 11, причем этот внутренний якорь 11 жестко соединен с внешней стойкой 6 стойки 4 винта.
Согласно показанному здесь предпочтительному варианту выполнения по Фиг.2, указанный электрический привод E может соединяться с вторым приводом TK, выполненным как термодинамическая силовая машина, за счет того, что внутренний якорь 11 электрического привода E жестко соединен с внешней стойкой 6 стойки 4 винта, и, как будет пояснено в дальнейшем, находящаяся в кинематическом взаимодействии со вторым приводом передача 2 винта через поводок 21 коронной шестерни тоже без возможности проворачивания соединена с внешней стойкой 6. При показанном здесь предпочтительном варианте выполнения предпочтительно не существует никаких областей непосредственного механического контакта, соответственно, никакой связи между неподвижной частью (статором) электрического привода E и выполненным как термодинамическая силовая машина, вторым приводом TK. За счет коаксиально расположенного кольцевого электродвигателя указанное взаимодействие здесь является чисто электромагнитным. Иначе говоря, при имеющемся здесь, выполненном как кольцевой электродвигатель электрическом приводе E не используется никаких дополнительных затрат на холостой ход, соответственно, на нерабочее состояние, вследствие чего блокировка электрического привода E практически исключена.
Для достижения еще более высокой степени надежности опционально можно было бы даже в области между вращающейся частью (ротором) выполненного как кольцевой электродвигатель электрического привода E и передачей винта вертолета, соответственно, выполненным как термодинамическая силовая машина, вторым приводом TK предусмотреть разъединяющий механизм.
Благодаря этому электрический привод E со вторым приводом в указанном соединенном состоянии может принимать дополнительный крутящий момент, и за счет этого указанный электрический привод E может поддерживать второй привод при приведении в действие несущего винта и, соответственно, наоборот.
Указанная передача 2 несущего винта заключена в корпус 30 передачи, который защищает различные конструктивные элементы от внешних воздействий. При этом показанный здесь электрический привод E механически соединен по меньшей мере с корпусом 30 передачи винта вертолета, соответственно, передачи 2 несущего винта, в частности, за счет того, что работающее как статор внешнее кольцо 10 электрического привода E жестко соединено с корпусом 30 передачи, соответственно, зафиксировано. В частности, при этом первые крепежные консоли 12 внешнего кольца 10 могут жестко соединяться с корреспондирующими вторыми крепежными консолями 31 корпуса 30 передачи.
При этом, как можно видеть на Фиг.2, между внешним кольцом 10 и внутренним якорем 11 образован магнитный зазор M. Предпочтительно стойка 4 винта изготовлена таким образом, что необходимый крутящий момент создается магнитными полями, соответственно, изгибные моменты от ротора оказывают минимальное действие или не оказывают никакого воздействия на магнитный зазор M между внешним кольцом 10 и внутренним якорем 11. Перекрытие 15 защищает электрический привод E от воздействий окружающей среды.
Показанная на Фиг.2 передача несущего винта, соответственно, передача 2 винта вертолета имеет центральную полость H1. В этой центральной полости H1 установлена фиксировано по месту и без возможности проворачивания опорная стойка 5, которая здесь выполнена как полое тело с полостью H2, а также окружающей центральную ось z. Эта центральная ось z одновременно образует продольное направление опорной стойки 5 и ось вращения вала несущего винта, соответственно, стойки 4 несущего винта. Здесь опорная стойка 5 выполнена полностью пересекающей корпус 30 передачи, причем через центральную полость H2 в опорной стойке 5 по существу вдоль центральной оси z могут проводиться, например, не представленные здесь управляющие тяги или электрические линии, такие как кабели или т.п. За счет такого перемещения в опорную стойку 5, по сравнению с расположением снаружи стойки 4 несущего винта, эти управляющие тяги или кабели не могут повреждаться из-за внешних воздействий, например, столкновения с птицей и т.п. Далее, за счет перемещения управляющих тяг в полость H2 опорной стойки 5 снаружи стойки 4 несущего винта получается достаточно места для размещения выполненного как кольцевой электродвигатель электрического привода E коаксиально стойке 4 несущего винта. Иначе говоря, расположенные внутри управляющие тяги и вытекающий из этого, возможный отказ от автомата перекоса снаружи стойки 4 несущего винта делают возможным простое крепление кольцевого электродвигателя на стойке 4 несущего винта.
Предпочтительно со стороны приводной ветви (трансмиссии) на корпусе 30 передачи расположено поворотное устройство для отклонения и ориентации указанных управляющих тяг.
Главная приводная ветвь, соответственно, приводная ветвь (трансмиссия) 32, которая через отверстие 20 размещается в корпусе 30 передачи, здесь находится в механическом взаимодействии с не показанным здесь вторым приводом TK, выполненным как термодинамическая силовая машина. На опорной стойке 5 здесь согласно Фиг.2 поворотно установлена ведущая шестерня 34, причем эта ведущая шестерня 34 здесь имеет конический зубчатый венец, который может взаимодействовать с зубчатым колесом 33 приводной ветви 32. С ведущей шестерней 34 соединено выполненное как полый вал, второе солнечное колесо 35, которое имеет трубчатый участок 36 с внешним зубчатым венцом 37. С помощью этого второго солнечного колеса 35 ведущая шестерня 34 может вращаться вокруг центральной оси z, будучи насажена на пространственно и вращательно неподвижную опорную стойку 5. Второе солнечное колесо 35 - как показано на Фиг.2 - установлена на опору 38 солнечного колеса с возможностью вращения на опорной стойке 5. С помощью приводной ветви 32 может приводиться в действие второе солнечное колесо 35, благодаря чему это второе солнечное колесо 35 представляет собой ведущий полый вал. На высоте внешнего зубчатого венца 37 второго солнечного колеса 35 несколько приводных планетарных колес 41 установлены на относящихся к ним, вторых водилах 39 планетарной передачи, причем эти водила 39 планетарной передачи могут рассматриваться как планетарные валы. Приводные планетарные колеса 41 имеют каждое внешний зубчатый венец и входят в зацепление с внешним зубчатым венцом 37 второго солнечного колеса 35. Вторые водила 39 планетарной передачи выполнены фиксированными по месту и находятся на расстоянии от корпуса 30 передачи, соответственно, от центральной оси z, соответственно, относительно установленного с возможностью вращения, второго солнечного колеса 35, так что приводные планетарные колеса 41 и их вторые водила 39 планетарной передачи могут приводиться в фиксированное по месту вращение внутри корпуса 30 передачи. Вторые водила 39 планетарной передачи выполнены как водила сдвоенного планетарного ряда, так как на расстоянии от каждого приводного планетарного колеса 41 в направлении оси P планетарного колеса установлено второе планетарное колесо 40 на каждом втором водиле 39 планетарной передачи. Эти приводные планетарные колеса 41 установлены каждое параллельно относящимся к ним вторым планетарным колесам 40. Несколько вторых водил 39 планетарной передачи расположено вокруг центральной оси z, с распределением по внешней окружности опорной стойки 5 и фиксировано по месту в корпусе 30 передачи.
Показанная здесь передача 2 несущего винта может быть выполнена как двухступенчатая планетарная передача. Опорная стойка 5 здесь полностью пересекает корпус 30 передачи и выходит из корпуса 30 передачи на обращенной от приводной ветви 32 стороне.
На высоте вторых планетарных колес 40 в направлении центральной оси z установлена коронная шестерня 22 с возможностью вращения вокруг центральной оси z. Эта коронная шестерня 22 охватывает все вторые планетарные колеса 40, приводится в действие за счет вращения вторых планетарных колес 40 и, тем самым, может вращаться вокруг центральной оси z. На коронной шестерне 22 установлен работающий как устройство, передающее усилие, поводок 21 коронной шестерни, с помощью которого вращение коронной шестерни 22 может передаваться на поворотную внешнюю стойку 6.
На Фиг.2a показано продольное сечение одного другого предпочтительного варианта выполнения предлагаемого изобретением летательного аппарата с несущим винтом с гибридным приводом, причем - в отличие от показанного на Фиг.2 варианта выполнения - несколько, т.е. здесь три, кольцевых электродвигателей E; E'; E" штабелированы друг на друге, и каждый содержит внешнее кольцо 10; 10'; 10", а также внутренний якорь 11; 11'; 11".
На Фиг.3 показано продольное сечение одного другого предпочтительного варианта выполнения предлагаемого изобретением летательного аппарата с несущим винтом с гибридным приводом 1, причем электрический привод E выполнен как кольцевой электродвигатель с интегрированной передачей PE, выполненной как планетарная передача. Как видно на Фиг.3, здесь передача 2 несущего винта соответствует передаче 2 несущего винта показанного на Фиг.2 предпочтительного варианта выполнения.
При показанном здесь предпочтительном варианте выполнения на работающем как ротор, кольцеобразном (т.е. образующем внутреннее кольцо) внутреннем якоре 11 установлено без возможности проворачивания снабженное внутренним зубчатым венцом полое колесо 51, так что это полое колесо 51 присоединяется к вращению внутреннего якоря 11.
Показанная здесь планетарная передача PE имеет несколько снабженных внешним зубчатым венцом, первых планетарных колес 52, которые установлены на относящихся к ним первых водилах 53 планетарной передачи. Внешние зубчатые венцы первых планетарных колес 52 здесь находятся в зацеплении с внутренним зубчатым венцом полого колеса 51. Первые планетарные колеса 52, таким образом, установлены с возможностью вращения в полом колесе 51, что обусловлено конструкцией. При этом не фиксированные по месту планетарные колеса 52 вращаются каждое вокруг своей планетарной оси P и поворачиваются внутри коронной шестерни 22 вокруг центральной оси ротора, соответственно, центральной оси z. Это вращение первых планетарных колес 52 здесь происходит посредством вращательного привода полого колеса 51, расположенного на внутреннем якоре 11 и снабженного внутренним зубчатым венцом, вокруг расположенного здесь без возможности проворачивания, т.е. без возможностьи вращения, первого солнечного колеса 50. Как можно видеть на Фиг.3, такое расположение без возможности проворачивания первого солнечного колеса 50 в указанном другом предпочтительном варианте выполнения осуществляется с помощью неподвижного дна 55 корпуса, которое создает жесткое соединение между внешним кольцом 10 и первым солнечным колесом 50.
Через закрепленный без возможности проворачивания соединительный элемент 54 между первыми водилами 53 планетарной передачи и внешней стойкой 6 эта внешняя стойка 6 приводится во вращение.
На Фиг.3a показано продольное сечение одного другого предпочтительного варианта выполнения предлагаемого изобретением летательного аппарата с несущим винтом с гибридным приводом 1 и несколькими, т.е. здесь двумя, электрическими, штабелированными друг на друге кольцевыми электродвигателями E; E', причем эти кольцевые электродвигатели E; E' снабжены каждый интегрированной передачей, выполненной как планетарная передача PE; PE'. Как можно видеть на Фиг.3a, оба штабелированных друг на друге кольцевых электродвигателя E; E' имеют каждый первые солнечные колеса 50; 50', первые снабженные внутренним зубчатым венцом полые колеса 51; 51', первые планетарные колеса 52; 52', первые водила 53; 53' планетарной передачи, а также соединительные элементы 54; 54'. В этом другом предпочтительном варианте выполнения между обоими штабелированными друг на друге кольцевыми электродвигателями E; E' имеется промежуточное дно 56, причем это промежуточное дно 56 создает соединение между внешними кольцами 10; 10' и первым солнечным колесом 50', тогда как неподвижное дно 55 корпуса создает жесткое соединение между внешним кольцом 10 и первым солнечным колесом 50. Этот другой предпочтительный вариант выполнения соединяет в себе преимущества понижения, достигаемого с помощью интегрированной передачи, с особенно высоким создаваемым крутящим моментом, а также обеспечиваемой посредством штабелируемых друг на друге кольцевых электродвигателей модульной конструкции электрического привода с различными достигаемыми ступенями мощности.
На Фиг.4 показана блок-схема устройства управления приводной мощностью согласно предпочтительному варианту выполнения предлагаемого изобретением летательного аппарата с несущим винтом с выполненным здесь параллельно гибридным приводом 1. В левой рамке при этом представлены основные компоненты электрической приводной системы, тогда как в правой рамке представлены основные компоненты выполненного как термодинамическая силовая машина привода TK.
Как уже показано на Фиг.2, в предлагаемом изобретением летательном аппарате с несущим винтом с гибридным приводом 1 выполненный как термодинамическая силовая машина привод TK, а также электрический привод E механически взаимодействуют со стойкой 4 несущего винта.
Как можно видеть на Фиг.4, летательный аппарат с несущим винтом здесь содержит блок ST управления, а также блок LEE силовой электроники (называемый также «инвертором»), причем с помощью передачи c электрических сигналов блок LEE силовой электроники взаимодействует с блоком ST управления.
Далее, блок LEE силовой электроники выполнен таким образом, чтобы с помощью передачи b электрической энергии принимать электрическую энергию от источника электрической энергии в форме блока BS аккумуляторных батарей и передавать ее дальше в электрический привод E в виде электрического тока.
При этом блок ST управления выполнен таким образом, что он с помощью передачи c электрических сигналов может через блок AE авионики принимать входные данные датчика от второго, выполненного как термодинамическая силовая машина привода TK, электрического привода E, пилотного управления, и от источника энергии; а выходные данные могут направляться на блок LEE силовой электроники.
Как видно в правой рамке на Фиг.4, здесь выполненный как термодинамическая силовая машина, второй привод TK приводится в действие посредством блока AR регулировки привода через транспортирующую ископаемое горючее топливную магистраль d. Этот выполненный как термодинамическая силовая машина, второй привод TK при этом через передачу 2 несущего винта и стойку 4 несущего винта находится в механическом взаимодействии a с несущим винтом. При этом указанный блок AR регулировки привода предпочтительно выполнен автономным и полностью цифровым как так называемая электронно-цифровая система управления двигателем (FADEC), благодаря чему второй привод TK во всех рабочих режимах регулируется автоматически.
Посредством передачи c электронных сигналов выполненный как FADEC блок AR регулировки привода может находиться в соединении с блоком AE авионики, причем этот блок AE авионики может регистрировать выдаваемую вторым приводом TK выходную мощность и путем передачи c электронных сигналов может передавать на блок ST управления.
Предлагаемый изобретением летательный аппарат с несущим винтом может содержать дополнительную систему SV энергоснабжения, которая обеспечивает дополнительное снабжение энергией блока AE авионики и блока BS аккумуляторных батарей.
В частности, указанный блок ST управления может быть снабжен логическими схемами (Logik), так что, исходя из блока LEE силовой электроники, указанная выходная мощность электрического привода E может устанавливаться в зависимости от условия полета, от профиля полета, от состояния батарей, а также от выдаваемой вторым приводом TK выходной мощности. Иначе говоря, при выходе из строя второго привода TK указанный блок ST управления мог бы при необходимости автоматически повысить выходную мощность электрического привода E.
К тому же, электрический привод E указанного гибридного привода 1 предлагаемого изобретением летательного аппарата с несущим винтом может находиться в соединенном без возможности проворачивания состоянии между электрическим приводом E и вторым, выполненным как термодинамическая силовая машина приводом TK, а во время работы второго привода TK находящийся в нерабочем состоянии электрический привод E может работать как генератор для дополнительной рекуперации энергии для блока BS аккумуляторных батарей. Предпочтительно в блоке LEE силовой электроники, соответственно, в электронном приводе E предусмотрен выпрямитель, например, в форме запирающего диода, вследствие чего в нерабочем состоянии электрического привода E может заряжаться указанный блок BS аккумуляторных батарей.
Хотя в показанном на Фиг.4 варианте выполнения электрический привод уже может работать как генератор, этот предлагаемый изобретением летательный аппарат с несущим винтом может опционально содержать дополнительные модули SEM для выработки электрической энергии для зарядки блока BS аккумуляторных батарей.
Особенно предпочтительно, что указанные логические схемы блока ST управления в дальнейшем обеспечивают автоматическую смену режима между выработкой крутящего момента для приведения в действие ротора и дополнительной рекуперацией энергии для блока BS аккумуляторных батарей.
На Фиг.5 показана блок-схема устройства управления приводной мощности упомянутому другому предпочтительному варианту выполнения предлагаемого изобретением летательного аппарата с несущим винтом с выполненным здесь последовательно гибридным приводом 1. Как можно видеть на Фиг.5, существенное отличие от показанного на Фиг.4, выполненного параллельно гибридного привода 1 состоит в том, что здесь не возникает механического взаимодействия между выполненным как термодинамическая силовая машина, вторым приводом TK и стойкой 4 несущего винта, соответственно, несущим винтом.
Согласно этому другому предпочтительному варианту выполнения, предлагаемый изобретением летательный аппарат с несущим винтом может содержать дополнительные, механически связанные с приводом 2 модули SEM для выработки электрической энергии для зарядки блока BS аккумуляторных батарей с помощью дополнительной передачи b электрической энергии, чтобы сделать возможной непрерывную длительную эксплуатацию выполненного как кольцевой электродвигатель, электрического привода E во время выполнения всей миссии, соответственно, всего полета. В сочетании с таким предпочтительно автономным, электрическим приводом E указанные модули SEM для выработки электрической энергии соответственно должны иметь возможность поставлять достаточно тока, чтобы гарантировать автономный режим электрического привода E. Указанный по меньшей мере один модуль SEM для выработки электрической энергии здесь работает как дополнительный генератор тока, который полностью подает энергию для непрерывного режима работы электрического привода E.
Далее, согласно этому представленному здесь, другому одному предпочтительному варианту выполнения, посредством дополнительной передачи c электрических сигналов между блоком ST управления и выполненным как FADEC блоком AR регулировки привода в зависимости от потребности может подключаться второй привод TK, соответственно, этот второй привод TK в зависимости от потребности может вводиться в эксплуатацию.
В упомянутом представленном здесь, другом предпочтительном варианте выполнения указанный выполненный как термодинамическая силовая машина привод TK может рассматриваться лишь как средство увеличения дальности полета.
Перечень ссылочных позиций
1 гибридный привод
2 передача несущего винта
4 стойка винта, соответственно, стойка несущего винта
5 опорная стойка
6 внешняя стойка
7 опора (между опорной стойкой и внешней стойкой)
10 внешнее кольцо
11 внутренний якорь
12 первая крепежная консоль (работающего как статор внешнего кольца)
15 колпак (электрического привода)
20 отверстие (в корпусе передачи для приема приводной ветви)
21 поводок коронной шестерни (как средство передачи силы)
22 коронная шестерня
30 корпус передачи (главной передачи)
31 вторая крепежная консоль (корпуса передачи)
32 приводная ветвь (трансмиссия)
33 зубчатое колесо приводной ветви
34 ведущая шестерня
35 второе солнечное колесо
36 трубчатый участок
37 внешний зубчатый венец (трубчатого участка)
38 опора солнечного колеса
39 второе водило планетарной передачи
40 второе планетарное колесо
41 приводное планетарное колесо
42 опора водила планетарной передачи
50; 50' первое солнечное колесо (интегрированной планетарной передачи в кольцевом электродвигателе)
51; 51' полое колесо
52; 52' первое планетарное колесо (интегрированной планетарной передачи в кольцевом электродвигателе)
53; 53' первое водило планетарной передачи (интегрированной планетарной передачи в кольцевом электродвигателе)
54; 54' соединительный элемент (между водилом планетарной передачи и внешней стойкой)
55 дно корпуса (соединение между внешним кольцом и первым солнечным колесом 50)
56 промежуточное дно (соединение между внешним кольцом и первым солнечным колесом 50')
BS блок аккумуляторных батарей
E; E'; E" электрический привод
H1 первая полость (корпуса главной передачи)
H2 вторая полость (опорной стойки)
H3 третья полость (внешней стойки)
M магнитный зазор (между внутренним якорем и внешним кольцом)
P ось планетарного колеса
PE; PE' планетарная передача (электрического привода)
SEM модули для выработки электрической энергии
ST блок управления
TK второй, выполненный как термодинамическая силовая машина привод
z центральная ось
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод, в частности, для несущего винта летательного аппарата с несущим винтом | 2020 |
|
RU2802265C2 |
| ВАЛ НЕСУЩЕГО ВИНТА | 2017 |
|
RU2755427C2 |
| ВИНТ ДЛЯ СПОСОБНОГО К ЗАВИСАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 2018 |
|
RU2757548C2 |
| Редуктор несущего винта вертолета | 2017 |
|
RU2742361C2 |
| ВИНТ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, СПОСОБНОГО К ЗАВИСАНИЮ | 2017 |
|
RU2733306C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ, СПОСОБНЫЙ К ЗАВИСАНИЮ | 2017 |
|
RU2733299C1 |
| НЕСУЩИЙ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2017 |
|
RU2668482C1 |
| ЭЛЕКТРОПРИВОДНОЕ УСТРОЙСТВО ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2011 |
|
RU2547938C2 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, ВЫПОЛНЕННОГО С ВОЗМОЖНОСТЬЮ ВИСЕНИЯ | 2012 |
|
RU2606423C2 |
| РОТОРНАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2021 |
|
RU2828656C1 |





Изобретение относится к летательным аппаратам. Летательный аппарат с несущим винтом с гибридным приводом для приведения в действие несущего винта, где гибридный привод содержит электрический привод и второй выполненный как термодинамическая силовая машина привод. Электрический привод содержит средства для соединения электрического привода с соединяемой без возможности проворачивания с приводным узлом передачи винта вертолета стойкой винта для соединения без возможности проворачивания с несущим винтом или хвостовым винтом. Электрический привод выполнен как кольцевой электродвигатель, расположеный и закрепленный коаксиально стойке винта. Электрический привод может механически связываться с выполненным как термодинамическая силовая машина приводом, так что электрический привод вращается вместе со вторым приводом в связанном состоянии, и благодаря этому электрический привод имеет возможность поддержки второго привода при приведении в действие несущего винта или хвостового винта и наоборот для образования параллельно включаемого гибридного привода. Упрощается конструкция и снижается вес. 16 з.п. ф-лы, 7 ил.
1. Летательный аппарат с несущим винтом с гибридным приводом (1) для приведения в действие несущего винта летательного аппарата с несущим винтом, причем гибридный привод (1) содержит по меньшей мере один электрический привод (E) и второй выполненный как термодинамическая силовая машина привод (TK), причем упомянутый по меньшей мере один электрический привод (E) содержит:
средства для соединения указанного по меньшей мере одного электрического привода (E) с соединяемой без возможности проворачивания с приводным узлом передачи (2) винта вертолета стойкой (4) винта для соединения без возможности проворачивания с несущим винтом или хвостовым винтом,
отличающийся тем, что
указанный по меньшей мере один электрический привод (E) выполнен как по меньшей мере один кольцевой электродвигатель, причем указанный по меньшей мере один кольцевой электродвигатель расположен и закреплен коаксиально стойке (4) винта и
причем упомянутый электрический привод (E) имеет возможность механического связывания с упомянутым вторым выполненным как термодинамическая силовая машина приводом (TK), так что электрический привод (E) имеет возможность вращения вместе со вторым приводом (TK) в связанном состоянии, и благодаря этому электрический привод (E) имеет возможность поддержки второго привода (TK) при приведении в действие несущего винта или хвостового винта и соответственно наоборот для образования параллельно включаемого гибридного привода (1).
2. Летательный аппарат с несущим винтом по п.1, отличающийся тем, что электрический привод (E) выполнен как кольцевой электродвигатель с работающим как ротор внутренним якорем (11), причем этот внутренний якорь (11) выполнен с возможностью жесткого соединения непосредственно со стойкой (4) винта.
3. Летательный аппарат с несущим винтом по п.1, отличающийся тем, что электрический привод (E) выполнен как кольцевой электродвигатель с работающим как ротор внешним якорем, причем этот внешний якорь выполнен с возможностью жесткого соединения со стойкой винта.
4. Летательный аппарат с несущим винтом по п.1 или 2, отличающийся тем, что электрический привод (E) выполнен как кольцевой электродвигатель с интегрированной передачей для передачи силы на стойку (4) винта.
5. Летательный аппарат с несущим винтом по п.4, отличающийся тем, что электрический привод (E) выполнен как кольцевой электродвигатель с интегрированной передачей, выполненной как планетарная передача.
6. Летательный аппарат с несущим винтом по любому из предыдущих пунктов, отличающийся тем, что электрический привод (E) выполнен с возможностью механического соединения по меньшей мере с корпусом (30) передачи (2) винта вертолета, в частности, за счет того, что работающее как статор внешнее кольцо (10) электрического привода (E) может быть жестко соединено с корпусом (30) передачи.
7. Летательный аппарат с несущим винтом по любому из предыдущих пунктов, отличающийся тем, что указанный по меньшей мере один электрический привод (E) рассчитан таким образом и имеет такие размеры, что несущий винт и/или хвостовой винт летательного аппарата с несущим винтом, в частности вертолета, может приводиться в действие автономно без дополнительного привода.
8. Летательный аппарат с несущим винтом по любому из предыдущих пунктов, отличающийся тем, что упомянутые несколько выполненных как кольцевые электродвигатели приводов (E) расположены друг над другом и закреплены коаксиально стойке (4) винта.
9. Летательный аппарат с несущим винтом по любому из предыдущих пунктов, отличающийся тем, что выполненный как термодинамическая силовая машина привод (TK) представляет собой двигатель внутреннего сгорания, турбинный двигатель, двигатель с принудительным зажиганием, дизельный двигатель или привод на топливных элементах.
10. Летательный аппарат с несущим винтом по любому из предыдущих пунктов, отличающийся тем, что гибридный привод (1) содержит источник электрической энергии, в частности блок (BS) аккумуляторных батарей, и причем этот электрический привод (E) гибридного привода (1) находится в соединенном без возможности проворачивания состоянии между электрическим приводом (E) и вторым выполненным как термодинамическая силовая машина приводом (TK), а во время работы второго привода (TK) этот электрический привод (E) может работать как генератор для дополнительной рекуперации энергии для блока (BS) аккумуляторных батарей.
11. Летательный аппарат с несущим винтом по п.10, отличающийся тем, что в электронном приводе (E) предусмотрен выпрямитель, в частности, в форме запирающего диода, так что в нерабочем состоянии электрического привода (E) может заряжаться блок (BS) аккумуляторных батарей.
12. Летательный аппарат с несущим винтом по любому из предыдущих пунктов, отличающийся тем, что стойка (4) винта выполнена сборной из двух частей и содержит опорную стойку (5), а также внешнюю стойку (6), причем эта внешняя стойка (6) выполнена как полое тело и установлена с возможностью вращения вокруг центральной оси (Z) относительно опорной стойки (5), охватывая опорную стойку (5) концентрично, и причем внешняя стойка (6) выполнена с возможностью взаимодействия с передачей (2) винта вертолета, причем опорная стойка (5) может быть установлена в летательном аппарате с несущим винтом фиксированно по месту и без возможности проворачивания, так что внешняя стойка (6) без возможности проворачивания может соединяться с несущим винтом и может приводиться во вращение передачей (2) винта вертолета.
13. Летательный аппарат с несущим винтом по п.12, отличающийся тем, что опорная стойка (5) образована как полое тело, так что конструктивные элементы, такие как управляющие тяги и/или кабельная разводка, могут быть расположены, полностью пересекая опорную стойку (5) и внешнюю стойку (6) в направлении центральной оси (z).
14. Летательный аппарат с несущим винтом по любому из предыдущих пунктов, отличающийся тем, что стойка (4) винта может быть без возможности проворачивания связана с выполненным как ведущая шестерня (34) приводным узлом, причем эта ведущая шестерня (34) может быть установлена на опорной стойке (5) с возможностью вращения посредством по меньшей мере одной радиальной опоры, и посредством соединенного с ведущей шестерней (34) без возможности проворачивания второго солнечного колеса (35) может быть обеспечено вращение по меньшей мере одного приводного планетарного колеса (41) на обращенной к ведущей шестерне (34) стороне соответствующего второго водила (39) планетарной передачи вокруг соответствующей оси (P) планетарного колеса, и причем по меньшей мере одно относящееся к упомянутому по меньшей мере одному приводному планетарному колесу (41), установленное фиксированно по месту второе планетарное колесо (40) окружено установленной с возможностью вращения вокруг центральной оси (z), снабженной внутренним зубчатым венцом коронной шестерней (22), и между коронной шестерней (22) и внешней стойкой (6) может быть помещено или приформовано устройство, передающее усилие, таким образом, что исходя из вращательного движения ведущей шестерни (34) могут приводиться во вращение внешняя стойка (6) и связанный с внешней стойкой (6) без возможности проворачивания несущий винт.
15. Летательный аппарат с несущим винтом по любому из предыдущих пунктов, отличающийся тем, что этот летательный аппарат с несущим винтом содержит блок (ST) управления, а также блок (LEE) силовой электроники,
причем блок (LEE) силовой электроники может взаимодействовать с блоком (ST) управления, источником электрической энергии, в частности блоком (BS) аккумуляторных батарей, и с электрическим приводом (E), а, в частности, блок (LEE) силовой электроники может принимать электрическую энергию от источника энергии и в форме электрического тока передавать на электрический привод (E),
причем блок (ST) управления выполнен так, что он может получать входные данные датчика от второго привода (TK), электрического привода (E), от пилотного управления и от источника электрической энергии; а выходные данные может передавать на блок (LEE) силовой электроники, и
причем блок (ST) управления снабжен логическими схемами, так что с помощью блока (LEE) силовой электроники выходная мощность электрического привода (E) может регулироваться в зависимости от условий полета, от профиля полета, от состояния батарей, а также от выдаваемой вторым приводом (TK) выходной мощности.
16. Летательный аппарат с несущим винтом по п.15, отличающийся тем, что логические схемы блока (ST) управления делают возможной автоматическую смену режима между выработкой крутящего момента для приведения в действие винта и дополнительной рекуперацией энергии для блока (BS) аккумуляторных батарей.
17. Летательный аппарат с несущим винтом по п.15, отличающийся тем, что этот летательный аппарат с несущим винтом содержит дополнительные механически связанные со вторым приводом (TK) модули (SEM) для выработки электрической энергии для зарядки блока (BS) аккумуляторных батарей, так что получается выполненный последовательно гибридный привод (1).
| СПОСОБ ВЕДЕНИЯ ПОСЛЕОПЕРАЦИОННОГО ПЕРИОДА У БОЛЬНЫХ С СЕПТОПЛАСТИКОЙ | 2014 |
|
RU2551190C1 |
| WO 2016030168 A1, 03.03.2016 | |||
| DE 102010021024 A1, 24.11.2011 | |||
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН С КАНАЛЬНЫМИ ВИНТАМИ | 2016 |
|
RU2629473C1 |

