Область техники, к которой относится изобретение
Предложенное изобретение относится к кормоуборочному комбайну согласно ограничительной части пункта 1 формулы изобретения, и к способу эксплуатации кормоуборочного комбайна согласно ограничительной части пункта 26 формулы.
Уровень техники
В патентном документе DE 10241788 А1 раскрыт кормоуборочный комбайн с измельчающим устройством, которое содержит измельчающие ножи, распределенные по окружности приводимого во вращение измельчающего барабана. Частота вращения измельчающего барабана определяет длину измельчаемого материала, которая может регулироваться управляющим устройством в зависимости от влажности убираемой культуры. Влажность убираемой культуры определяется датчиком.
В патентном документе DE 102011005317 В4 раскрыт кормоуборочный комбайн с измельчающим устройством, причем с помощью устройства определяют состояние износа, в частности, затупление режущей кромки измельчающих ножей. Кроме того, с помощью указанного устройства осуществляют юстировку расстояния между режущей кромкой и противорежущей пластиной измельчающего устройства. Для определения остроты режущей кромки измельчающий нож проходит через поле индуктивного датчика, показания которого передаются в аналитический блок. Аналитический блок содержит предварительно определенные предельные значения остроты, при опускании показаний ниже которых автоматически инициируется заточка режущих кромок измельчающих ножей или информирование оператора о необходимости заточки. Для этого аналитический блок соединен с компьютером кормоуборочного комбайна.
В патентном документе ЕР 1380204 В1 раскрыт кормоуборочный комбайн с устройством дополнительного ускорения, служащим для ускорения потока измельченной культуры, направляемого вдоль подающей шахты устройства дополнительного ускорения. Устройство дополнительного ускорения частично окружено корпусом, внутри которого устройство дополнительного ускорения имеет относительную свободу перемещения, обеспечиваемую механизмом смещения оси и предназначенную для регулирования расстояния между подающей шахтой и устройством дополнительного ускорения. При этом расстояние регулируют в зависимости от влажности, плотности или скорости подачи убираемой культуры. Влажность, плотность или скорость подачи определяется датчиком, показания которого передаются в аналитическо-вычислительный блок. Регулировка выполняется исполнительным механизмом, управляемым аналитическо-вычислительным блоком.
Таким образом, в уровне техники известен кормоуборочный комбайн, в котором рабочие агрегаты, включающие в себя по меньшей мере одно регулируемое средство обработки убираемой культуры, по меньшей мере один исполнительный механизм для настройки и/или приведения в действие по меньшей мере одного средства обработки убираемой культуры и блок управления, предназначенный для управления исполнительным механизмом, отслеживают посредством датчиков, а исполнительным механизмом управляют в зависимости от зарегистрированных датчиками рабочих параметров или параметров уборочного процесса. При этом речь идет о замкнутых и автономных контурах управления. Это означает, что возможное влияние настроек, выполненных на одном рабочем агрегате, на режим и качество работы других рабочих агрегатов не учитывают. Это является недостатком, в частности потому, что производительность кормоуборочного комбайна не может быть использована полностью.
Раскрытие сущности изобретения
Поэтому задачей настоящего изобретения является обеспечение кормоуборочного комбайна вышеупомянутого типа и способа эксплуатации такого кормоуборочного комбайна, которые позволили бы повысить эффективность работы, особенно в уборочном режиме.
Поставленная задача решена кормоуборочным комбайном согласно пункту 1 формулы, и способом эксплуатации кормоуборочного комбайна согласно пункту 26 формулы.
Согласно пункту 1 формулы изобретения, предложен кормоуборочный комбайн, содержащий несколько рабочих агрегатов для осуществления процесса обработки убираемой культуры, систему помощи водителю, содержащую запоминающее устройство для сохранения данных, вычислительное устройство для обработки сохраненных в запоминающем устройстве данных и графический интерфейс пользователя, причем рабочие агрегаты включают в себя по меньшей мере одно регулируемое средство обработки убираемой культуры, по меньшей мере один исполнительный механизм для настройки и/или приведения в действие по меньшей мере одного средства обработки убираемой культуры и блок управления для управления исполнительным механизмом. Для лучшего использования производительных возможностей кормоуборочного комбайна соответствующий рабочий агрегат выполнен в виде автоматически регулируемого устройства и интегрирован в систему помощи водителю, стоящую выше в иерархической системе управления, причем система помощи водителю может оптимизировать работу каждого автоматически регулируемого устройства по отдельности или в зависимости по меньшей мере от одного другого автоматически регулируемого устройства. Это позволяет повысить эффективность работы кормоуборочного комбайна в целом, то есть как с точки зрения взаимодействия всех рабочих агрегатов, так и с точки зрения работы отдельных рабочих агрегатов.
Для этого в запоминающем устройстве или ячейке памяти соответствующих блоков управления системы помощи водителю сохранены наборы правил, связанные с соответствующими автоматически регулируемыми устройствами, причем набор правил, связанный с соответствующим автоматически регулируемым устройством, обеспечивает оптимизацию работы соответствующего рабочего агрегата независимо от работы других рабочих агрегатов.
В частности, система помощи водителю в целях оптимизации работы отдельных рабочих агрегатов может содержать доступные для выбора стратегии, специфические для рабочих агрегатов и сохраненные в запоминающем устройстве. Возможность индивидуального выбора стратегий, специфических для рабочего агрегата, выгодна тем, что это позволяет задать основную задачу оптимизации работы. Так, например, стратегии, специфические для рабочего агрегата, могут содержать в качестве целевых установок «эффективность», «затраты», «производительность» и «качество работы». Приведенный выше список не является исчерпывающим. Указанные целевые установки стратегий, специфических для рабочего агрегата, могут варьироваться в зависимости от подлежащего оптимизации рабочего агрегата, поскольку не для всех рабочих агрегатов могут быть предусмотрены идентичные стратегии, соответствующие целевым установкам.
Для этого каждая из доступных для выбора стратегий, специфических для рабочего агрегата, может быть направлена на настройку или оптимизацию по меньшей мере одного параметра уборочного процесса путем задания по меньшей мере одного рабочего параметра по меньшей мере одного рабочего агрегата. Параметрами уборочного процесса считаются качественно и количественно определяемые результаты работы отдельных рабочих агрегатов вплоть до работы кормоуборочного комбайна в целом, в частности, уплотняемость убираемой культуры, производительность на единицу площади, силосуемость убираемой культуры, потребляемая мощность и т.п., на которые влияет один или несколько рабочих параметров по меньшей мере одного из рабочих агрегатов.
В следующем предпочтительном варианте осуществления система помощи водителю может быть активирована оператором или по факту распознавания критического режима работы кормоуборочного комбайна. Это позволяет оператору активно оптимизировать работу одного или нескольких рабочих агрегатов. С другой стороны, критический режим работы, распознанный в рамках автоматического отслеживания процесса, может своевременно привести к автоматической активации системы помощи водителю в целях противодействия этому режиму. В этом случае от оператора потребуется выполнять оптимизацию только тогда, когда имеет место фактическое ухудшение результата работы.
В особенно выгодном варианте система помощи водителю управляет автоматически регулируемыми устройствами кормоуборочного комбайна в качестве диспетчера, что позволяет оптимизировать весь рабочий процесс кормоуборочного комбайна.
Для этого оптимизация всего рабочего процесса должна содержать по меньшей мере следующие этапы:
a) анализ работы кормоуборочного комбайна и идентификация критического режима работы;
b) отработка по меньшей мере одного набора правил, сохраненного в вычислительном устройстве, для преодоления критического режима работы путем предложения оптимизированных рабочих параметров одного или нескольких рабочих агрегатов с учетом взаимодействия между рабочими агрегатами;
c) визуализация эффекта взаимодействия;
d) автоматическая или предпринятая оператором регулировка оптимизированных рабочих параметров, сгенерированных на этапе b), на одном или нескольких рабочих агрегатах и эксплуатация кормоуборочного комбайна с оптимизированными рабочими параметрами; и
е) оценка и проверка работы кормоуборочного комбайна после выполненной регулировки оптимизированных рабочих параметров по меньшей мере на одном рабочем агрегате.
Это дает возможность хронологического прослеживания оптимизации. В результате оператор получает информацию о достигнутых эффектах, а также о уже выполненных и еще выполняемых действиях. При этом выгодна визуализация влияния возможных взаимодействий между отдельными рабочими агрегатами, благодаря чему оператор может оперативно получать информацию о том, как изменения отдельных рабочих параметров могут повлиять на процесс в целом. При этом учитывается выбор стратегии, специфической для определенного рабочего агрегата, которая принимается за основу процесса оптимизации.
В частности, каждому по меньшей мере из части рабочих агрегатов может быть назначена система датчиков, выполненная с возможностью регистрации сигналов с целью определения рабочих параметров и параметров, специфических для рабочего агрегата, причем система помощи водителю выполнена с возможностью приема и анализа сигналов соответствующей системы датчиков. При этом под рабочими параметрами понимают информацию, которая может регулироваться исполнительным механизмом соответствующего рабочего агрегата, например, частота вращения, расстояние и иные подобные характеристики. Под параметром, специфическим для рабочего агрегата, понимают соответствующий результат работы рабочего агрегата, в частности производительность, длину реза, степень измельчения убираемой культуры. Централизованный прием и анализ сигналов соответствующей системы датчиков системой помощи водителю является необходимым условием функционирования в качестве диспетчера.
Кроме того, системы датчиков могут быть выполнены с возможностью подачи сигналов, зарегистрированных соответствующей системой датчиков, в качестве входных сигналов на соответствующие автоматически регулируемые устройства с целью определения параметров, специфических для рабочего агрегата. Таким образом, соответствующие автоматически регулируемые устройства получают текущие параметры, специфические для рабочего агрегата, независимо от системы помощи водителю, что позволяет оптимизировать их независимо от других автоматически регулируемых устройств.
Кроме того, система помощи водителю может быть выполнена с возможностью подачи выходных сигналов соответствующего автоматически регулируемого устройства на другие автоматически регулируемые устройства в качестве дополнительных входных сигналов управления. Таким образом, возможна комплексная оптимизация автоматически регулируемых устройств, охватывающая все рабочие агрегаты, поскольку каждое из автоматически регулируемых устройств получает информацию об изменениях рабочих параметров других автоматически регулируемых устройств, благодаря чему можно свести к минимуму влияние взаимодействия на соответствующий процесс оптимизации.
В следующем предпочтительном варианте осуществления система помощи водителю может быть объединена в сеть с дополнительными вспомогательными системами, служащими для управления или регулирования приводного устройства, шасси, рулевого управления, перегрузочной системы и/или системы удерживания колеи. Вспомогательная система приводного устройства может использоваться для автоматического регулирования скорости движения кормоуборочного комбайна при заданной оператором нагрузке на приводном устройстве в зависимости от производительности обработки убираемой культуры и нагрузки. Кроме того, вспомогательной системой приводного устройства можно управлять путем задания функциональной стратегии, например, темпомата, постоянной производительности или нагрузки на двигатель. Вспомогательная система шасси может представлять собой, например, регулятор давления в шинах, автоматически адаптирующий давление в шинах при движении по дороге или полю. Вспомогательная система рулевого управления и/или системы удерживания колеи может предусматривать активное вмешательство в рулевое управление кормоуборочного комбайна с целью ведения кормоуборочного комбайна вдоль параллельных колей. При этом для повышения точности удерживания колеи можно использовать помимо сигналов позиционирования дополнительные корректирующие сигналы.
Таким образом, в качестве рабочих агрегатов кормоуборочного комбайна предусмотрено по меньшей мере одно навесное устройство, втягивающее устройство, измельчающее устройство, заточное устройство, устройство дополнительного ускорения и выбрасывающее устройство.
Кроме того, в качестве дополнительных рабочих агрегатов может быть предусмотрено устройство дополнительной обработки и/или устройство дозирования силосующего средства.
Предпочтительно, в качестве автоматически регулируемого устройства может быть предусмотрено автоматическое навесное устройство и автоматическое втягивающее устройство. Автоматическое навесное устройство и автоматическое втягивающее устройство позволяют оптимизировать, прежде всего, захват и пропускание убираемой культуры. При этом настройки навесного и втягивающего устройства, обеспечивающие высокую пропускную способность, вступают в противоречие с предотвращением избыточной длины материала.
В частности, автоматическое навесное устройство и автоматическое втягивающее устройство могут быть функционально объединены в автоматическом подающем устройстве. Учитывая, что настройки для оптимизации потока убираемой культуры и качества измельчения с точки зрения предотвращения избыточной длины материала требуют согласованной регулировки рабочих параметров навесного и втягивающего устройства, объединение автоматического навесного и автоматического втягивающего устройства в автоматическое подающее устройство представляется выгодным. Для этого в автоматическое подающее устройство могут поступать соответствующие сигналы от системы датчиков, предназначенной для определения избыточной длины измельченной убираемой культуры, с целью выполнения оптимизации автоматическим подающим устройством.
Кроме того, в качестве автоматически регулируемого устройства может выступать автоматическое измельчающее устройство и/или автоматическое заточное устройство. С помощью автоматического измельчающего устройства можно согласовать противоречащие друг другу стратегии «качество работы» и «производительность» измельчающего устройства, для чего параметры уборочного процесса «уплотняемость» и «производительность на единицу площади» измельчающего устройства оптимизируют путем задания по меньшей мере одного рабочего параметра одного из средств обработки убираемой культуры в соответствии с соответствующим набором правил.
Автоматическое заточное устройство оказывает существенное влияние на параметры уборочного процесса «уплотняемость » и «производительность на единицу площади» измельчающего устройства, так как острота ножей измельчающего устройства влияет как на качество измельчения, так и на потребляемую мощность. Затупление ножей приводит к тому, что параметры уборочного процесса «уплотняемость» и «производительность на единицу площади» измельчающего устройства не могут быть оптимизированы желаемым образом в рамках заданной стратегии. Соответственно, в данном случае система помощи водителю может вмешиваться в качестве диспетчера для обеспечения оптимизации на основании этих взаимодействий.
Кроме того, в качестве автоматически регулируемого устройства может выступать автоматическое устройство дополнительной обработки и/или автоматическое устройство силосования. Автоматическое устройство дополнительной обработки управляет или регулирует режим дополнительной обработки. Автоматическое устройство дополнительной обработки позволяет согласовать противоречащие друг другу стратегии «качество работы» и «производительность» устройства дополнительной обработки, для чего параметры уборочного процесса «степень измельчения» и «производительность на единицу площади» устройства дополнительной обработки оптимизируют путем задания по меньшей мере одного рабочего параметра одного из средств обработки убираемой культуры устройства дополнительной обработки в соответствии с соответствующим набором правил. Кроме того, оптимизированный режим работы устройства дополнительной обработки важен для расхода топлива.
Автоматическое устройство силосования управляет или регулирует работу устройства дозирования силосующего средства, учитывая противоречащие друг другу стратегии «качество работы» и «затраты». С помощью одной из систем датчиков можно регистрировать составляющие измельченного материала, чтобы с помощью сохраненного набора правил определить количество силосующего средства, необходимого для высокого качества силосования. Кроме того, автоматическое устройство силосования может получать информацию о соответствующей величине производительности, чтобы иметь возможность реагировать на возможные колебания производительности.
Кроме того, в качестве автоматически регулируемого устройства может выступать автоматическое выбрасывающее устройство и/или автоматическое устройство оптимизации вспомогательных агрегатов. Автоматическое выбрасывающее устройство управляет или регулирует работу устройства дополнительного ускорения и выбрасывающего устройства с учетом противоречащих друг другу стратегий «эффективности» и «производительности». С помощью одной из систем датчиков, которая может быть связана с выбрасывающим устройством, можно определять и отслеживать скорость и характеристики потока убираемой культуры. Набор правил позволяет подобрать настройки, которые, с одной стороны, обеспечивают высокую пропускную способность, а с другой стороны, малую потребляемую мощность.
Задача автоматического устройства оптимизации вспомогательных агрегатов заключается в том, чтобы дополнительно к центральным автоматически регулируемым устройствам соответствующих рабочих агрегатов обеспечить дополнительную оптимизацию в отношении «качества работы», «производительности» и «эффективности». В основе набора правил для автоматического устройства оптимизации вспомогательных агрегатов лежат те же условия, что и в основе других наборов правил для автоматически регулируемых устройств. Например, автоматическое устройство оптимизации вспомогательных агрегатов может получать соответствующие сигналы, специфические для производительности, от системы датчиков, определяющей производительность обработки убираемой культуры, для настройки деки барабана измельчающего устройства в зависимости от производительности, что позволяет снизить потребляемую мощность измельчающего устройства. Также возможен вариант, в котором при уборке травы расстояние между стенкой шахты и устройством дополнительного ускорения будет регулироваться для увеличения скорости на выходе.
В предпочтительном варианте осуществления система помощи водителю может содержать диалоговый модуль, позволяющий оператору управлять системой помощи водителю в диалоговом режиме. Диалоговый модуль может использоваться для упрощения настройки и оптимизации рабочих агрегатов оператором кормоуборочного комбайна, для чего оператор передает в систему помощи водителю проблему, которая может возникнуть в результате распознанного критического режима работы, посредством диалогового модуля. Система помощи водителю может помочь устранить проблему, в частности, путем предоставления оператору пошаговых инструкций. При этом система помощи водителю может работать с оператором итеративно и в интерактивном диалоге.
При этом режим диалога между системой помощи водителю и оператором может быть реализован на естественном языке. Диалог на естественном языке улучшает восприятие оптимизации системой помощи водителю и одновременно упрощает работу с ней.
В частности, диалог между системой помощи водителю и оператором может содержать по меньшей мере следующие этапы:
a) активация диалогового модуля,
b) редактирование цели применения,
c) запуск модуля «Оптимизация», предлагающего оператору выбрать стратегию,
d) активация диалоговой оптимизации по меньшей мере одного рабочего параметра рабочего агрегата в зависимости от выбранной стратегии с учетом влияния параметров, специфических для других рабочих агрегатов.
Таким образом, по существу, диалог между оператором и системой помощи водителю может происходить практически всегда одинаково, в результате чего работа с системой помощи водителю упрощается благодаря высокому уровню воспроизводимости независимо от цели применения, выбранной оператором.
Согласно следующему предпочтительному аспекту, система помощи водителю может быть выполнена с возможностью подключения к мобильному устройству обработки данных с целью осуществления двусторонней связи, причем мобильное устройство обработки данных имеет графический интерфейс пользователя и выполнено с возможностью визуализации и дистанционного выполнения по меньшей мере функций системы помощи водителю кормоуборочного комбайна. Мобильное устройство обработки данных может быть выполнено с возможностью предоставления по меньшей мере такой же информации, диалогов и возможностей манипулирования, которые доступны при использовании системы помощи водителю. Кроме того, данные и диалоги визуализируются практически идентично системе помощи водителю. Таким образом, оператор имеет дело, по существу, с таким же интерфейсом пользователя и структурой управления. Мобильное устройство обработки данных предлагает расширенные возможности применения, например, наблюдение за рабочим процессом другим человеком, в частности, находящимся вне кормоуборочного комбайна. Кроме того, мобильное устройство обработки данных позволяет дистанционно управлять системой помощи водителю. Например, изменение стратегии может быть инициировано другим участником технологического процесса, если другой участник считает необходимым адаптировать параметр уборочного процесса для достижения цели выбранной стратегии.
При этом кормоуборочный комбайн может содержать блок связи, оснащенный по меньшей мере первым интерфейсом, выполненным с возможностью подключения к системе шин кормоуборочного комбайна, и по меньшей мере вторым интерфейсом, предназначенным для обработки и подготовки сигналов системы шин и их передачи на мобильное устройство обработки данных.
В частности, мобильное устройство обработки данных может содержать запоминающее устройство, в котором с возможностью вызова могут быть сохранены аудиовизуальные последовательности. Мобильное устройство обработки данных может поддерживать выполняемые вручную работы по техническому обслуживанию, переоснащению или ремонту, предоставляя дополнительную информацию в виде текстов, изображений и видеопоследовательностей, которые также доступны на мобильном устройстве обработки данных даже за пределами комбайна.
Предпочтительно, мобильное устройство обработки данных способно работать независимо от рабочего состояния кормоуборочного комбайна. Таким образом, оператор получает информацию о кормоуборочном комбайне и о поставленных задачах даже в том случае, если кормоуборочный комбайн выключен для проведения ручных работ. Это особенно выгодно в том случае, если необходимо выполнить дополнительные работы по оптимизации, монтажу или переоснащению, предложенные системой помощи водителю. Для этого оператору могут быть предоставлены соответствующие инструкции независимо от системы помощи водителю.
Кроме того, для решения поставленной задачи предложен способ согласно независимому пункту 26 формулы.
Согласно пункту 26 формулы предложен способ эксплуатации кормоуборочного комбайна, содержащего:
- несколько рабочих агрегатов, с помощью которых осуществляют процесс обработки убираемой культуры,
- систему помощи водителю, содержащую запоминающее устройство, в котором сохранены данные, вычислительное устройство, с помощью которого обрабатывают сохраненные в запоминающем устройстве данные, и графический интерфейс пользователя,
- причем рабочие агрегаты включают в себя по меньшей мере одно регулируемое средство обработки убираемой культуры, исполнительный механизм, с помощью которого регулируют по меньшей мере одно средство обработки убираемой культуры, а также блок управления, с помощью которого управляют исполнительным механизмом,
причем соответствующий рабочий агрегат выполнен в виде автоматически регулируемого устройства и интегрирован в вышестоящую в иерархии систему помощи водителю, причем с помощью системы помощи водителю оптимизируют работу каждого автоматически регулируемого устройства по отдельности или в зависимости по меньшей мере от одного другого автоматически регулируемого устройства.
Краткое описание чертежей
Предложенное изобретение ниже раскрыто подробнее на примере варианта осуществления, представленного на фигурах, на которых изображено:
Фигура 1: схематичное изображение кормоуборочного комбайна.
Фигура 2: схематичное изображение структуры автоматически регулируемого устройства.
Фигура 3: схематичный обзор структуры системы помощи водителю.
Фигура 4: схематичное изображение графического интерфейса пользователя системы помощи водителю согласно фигуре 3.
Фигура 5: схематичное изображение диалогового модуля системы помощи водителю.
Фигура 6: схематичное изображение графического интерфейса пользователя системы помощи водителю согласно фигуре 4 с выбранным поддиалогом.
Осуществление изобретения
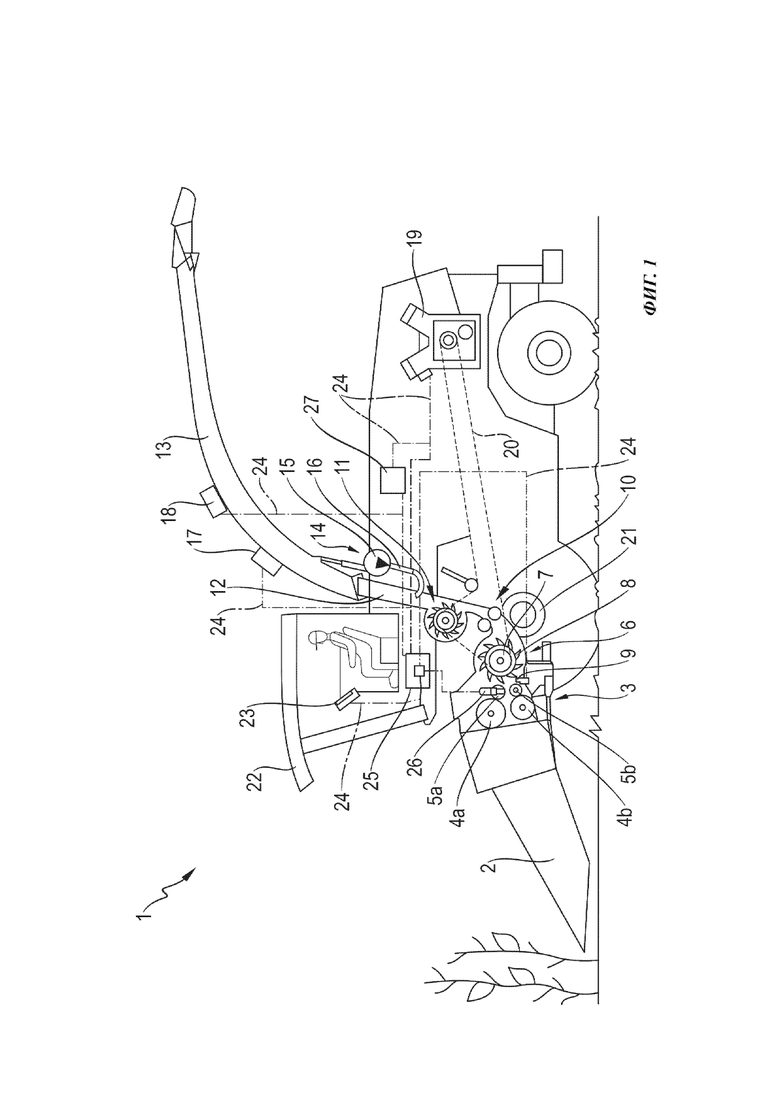
На фигуре 1 схематично изображен самоходный кормоуборочный комбайн 1 на виде сбоку. Кормоуборочный комбайн 1 содержит навесной агрегат 2, предназначенный для уборки, в частности, стеблевых культур. Навесной агрегат 2 может представлять собой, в частности, так называемую кукурузную приставку или кукурузный початкособиратель. Для уборки травы навесной агрегат 2 может быть выполнен в виде косилочного аппарата.
Собранная навесным агрегатом 2 культура поступает во втягивающее устройство 3. Втягивающее устройство 3 содержит по меньшей мере первую пару валков 4а, 4b и вторую пару валков 5а, 5b, установленных на раме или корпусе. По меньшей мере две пары валков 4а, 4b и 5а, 5b используются для втягивания и предварительного прессования культуры. Пары валков 4а, 4b и 5а, 5b образуют средство обработки убираемой культуры, выполненное с возможностью регулирования. Это позволяет, например, регулировать усилие предварительного прессования и частоту вращения пар валков 4а, 4b и 5а, 5b.
За втягивающим устройством 3 установлено измельчающее устройство 6. Измельчающее устройство 6 содержит измельчающий барабан 7, оборудованный измельчающими ножами 8 и приводящийся во вращение. Измельчающие ножи 8, вращающиеся вместе с измельчающим барабаном 7, взаимодействуют с неподвижной противорежущей пластиной 9 измельчающего устройства 6. Расстояние от противорежущей пластины 9 до огибающей измельчающего ножа 8 можно изменять или регулировать. Наименьшее возможное расстояние способствует снижению потребляемой мощности во время резания и постоянному качеству резания. Затачивающее устройство, связанное с измельчающим устройством 6 и не показанное на фигуре, используется для затачивания ножей 8 по мере необходимости, что позволяет противодействовать снижению качества измельчения вследствие затупления измельчающих ножей и повышению потребляемой мощности при работе измельчающего устройства.
Измельченная культура, выходящая из измельчающего устройства 6, может поступать в опциональное устройство 10 дополнительной обработки. Устройство 10 дополнительной обработки, также называемое кондиционирующим устройством или кукурузной дробилкой, служит для измельчения кукурузных зерен с целью повышения удобства использования или выхода энергии при использовании в качестве кормов или сырья для биогазовой установки. Такие устройства 10 дополнительной обработки содержат пару валков, причем валки приводятся во вращение с различной частотой. Соотношение частот вращения пар валков устройства 10 дополнительной обработки может изменяться. Степень измельчения зерна определяется, в частности, шириной зазора между двумя валками устройства 10 дополнительной обработки. Чем меньше ширина зазора, тем выше степень измельчения зерна. Ширину зазора можно регулировать. При необходимости устройство 10 дополнительной обработки можно удалить с пути движения убираемой культуры в кормоуборочном комбайне 1.
Из измельчающего устройства 6 или опционального устройства 10 дополнительной обработки измельченная культура поступает в устройство 11 дополнительного ускорения, перегружающего убираемую культуру через подающую шахту 12 и примыкающее выбрасывающее устройство 13, выполненное в виде выпускного колена, в транспортное средство, движущееся рядом с кормоуборочным комбайном 1 и не показанное на фигуре. В области устройства 11 дополнительного ускорения находится устройство 14 дозирования силосующего средства, вводящее жидкость в подающую шахту 12 с помощью нагнетательного насоса 15 переменного объема. Для этого предусмотрен инжектор 16, оканчивающийся в подающей шахте 12 и открывающийся в направлении движения потока культуры, благодаря чему жидкость наносится на проходящую культуру в мелко распыленном виде. На выбрасывающем устройстве 13 имеется по меньшей мере один датчик 17, выполненный с возможностью по меньшей мере определения влажности измельченной культуры относительно сухой массы. По меньшей мере один датчик 17 может быть выполнен в виде датчика ближней инфракрасной области спектра, обнаруживающего, в том числе, содержание составляющих потока культуры, в частности, неочищенной золы или белка. Возможна установка одного или нескольких дополнительных датчиков 18 для определения длины измельчения, скорости потока убираемой культуры и/или массового потока проходящей культуры к выбрасывающему устройству 13.
Для привода кормоуборочного комбайна 1 предусмотрено приводное устройство 19, выполненное в виде двигателя внутреннего сгорания, приводящего посредством ременной передачи 20 измельчающее устройство 6, устройство 10 дополнительной обработки и устройство 11 дополнительного ускорения. Навесное устройство 2 и втягивающее устройство 3 могут приводиться от дополнительной трансмиссии, которая может быть механически соединена с измельчающим устройством 6 или может приводиться гидростатическим механизмом независимо от измельчающего устройства 6. Кроме того, в частности, предусмотрен гидростатический ходовой привод 21, позволяющий регулировать скорость движения кормоуборочного комбайна 1.
Кормоуборочный комбайн 1 имеет кабину 22, в которой предусмотрено устройство 23 ввода/вывода, доступное для оператора кормоуборочного комбайна 1 и предназначенное, например, для настраивания и регулирования рабочих параметров и информирования оператора о текущих условиях эксплуатации и уборки культуры. Устройство 23 ввода/вывода соединено с системой 25 помощи водителю кормоуборочного комбайна 1 посредством системы 24 шин. Кроме того, система 24 шин соединяет с системой 25 помощи водителю датчики 17, 18 на выбрасывающем устройстве 13, датчик 26 втягивающего устройства 3 и прочие (не показанные на фигуре 1) датчики или системы 34 датчиков, а также исполнительные механизмы 32 для отслеживания и настройки и/или эксплуатации навесного устройства 2, втягивающего устройства 3, измельчающего устройства 6, затачивающего устройства, устройства 10 дополнительной обработки, устройства 11 дополнительного ускорения, устройства 14 дозирования силосующего средства, выбрасывающего устройства 13, а также ходовой привод 16, совместно упрощенно называемые рабочими агрегатами 30. В дальнейшем датчики 17, 18 и 26 будут упрощенно называться системой 34 датчиков.
При этом каждый из этих рабочих агрегатов 30 содержит по меньшей мере одно регулируемое средство 31 обработки убираемой культуры, позволяющее манипулировать убираемой культурой при осуществлении процесса обработки убираемой культуры в кормоуборочном комбайне 1 от захвата навесным устройством 2 до выгрузки через выбрасывающее устройство 13. Например, в случае втягивающего устройства 3 средство 31 обработки убираемой культуры образовано двумя парами валков 4а, 4b и 5а, 5b. В случае измельчающего устройства 6 средство 31 обработки убираемой культуры образовано измельчающим барабаном 7 с установленными в нем измельчающими ножами 8, противорежущей пластиной 9 и декой барабана. По меньшей мере один исполнительный механизм 32 соответствующего рабочего агрегата 30 служит для регулировки и/или использования по меньшей мере одного средства 31 обработки убираемой культуры рабочего агрегата 30 в соответствии с текущими условиями уборки культуры. Датчики или системы 34 датчиков отслеживают параметры, специфические для режима работы и рабочих агрегатов 30 или обрабатываемой ими убираемой культуры.
Кроме того, на фигуре 1 изображен блок 27 связи, подключенный к системе 24 шин. Блок 27 связи выполнен с возможностью приема данных, переданных системой 24 шин.
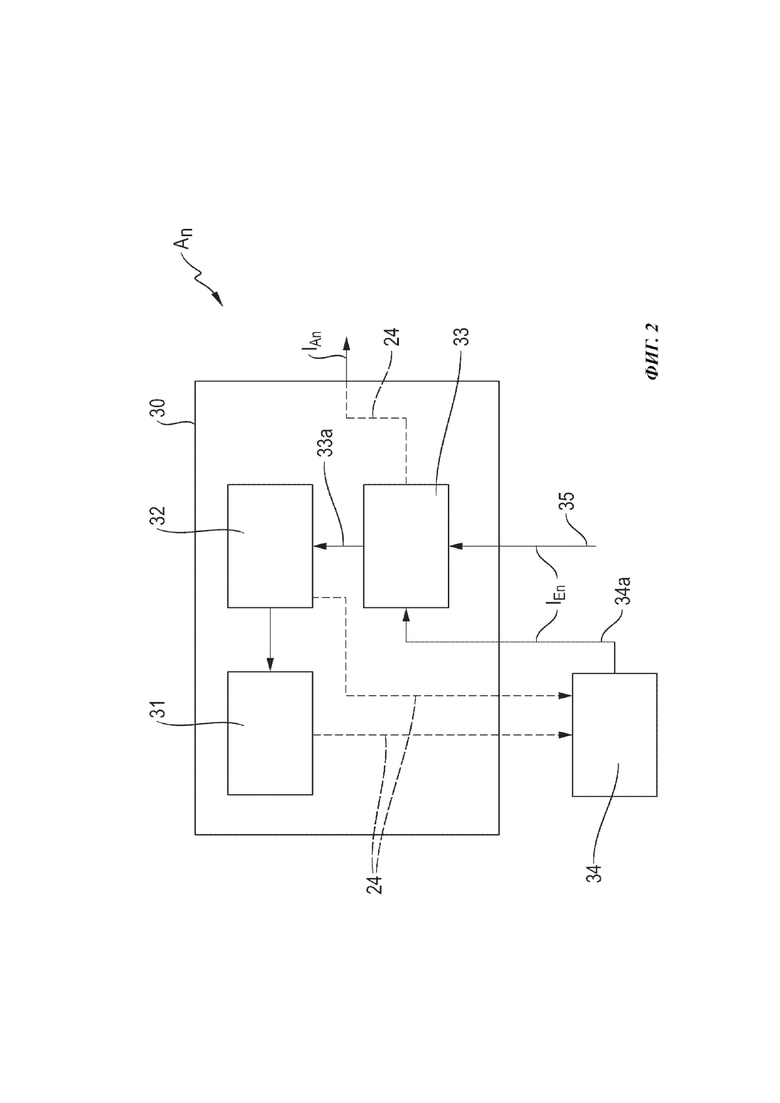
На фигуре 2 схематично изображена структура автоматически регулируемого устройства Аn. Рабочий агрегат 30, выполненный в виде автоматически регулируемого устройства Аn, содержит по меньшей мере одно средство 31 обработки убираемой культуры, исполнительный механизм 32 и блок 33 управления. Блок 33 управления передает на исполнительный механизм 32 посредством шины 24 данных управляющие сигналы 33а, служащие для настройки по меньшей мере одного средства 31 обработки убираемой культуры. Система 34 датчиков отслеживает по меньшей мере одно средство 31 обработки убираемой культуры рабочего агрегата 30 и при необходимости исполнительный механизм 32. Данные 34а датчика, полученные системой 34 датчиков, передаются по системе 24 шин на блок 33 управления для анализа.
Кроме того, блок 33 управления получает внешнюю информацию 35, передаваемую на кормоуборочный комбайн 1, например, другими уборочными машинами, рабочими машинами и/или центральной компьютерной системой и способную влиять на процесс обработки убираемой культуры. Данные 34а датчиков, предоставляемые системой 34 датчиков, и внешняя информация 35 формируют входные сигналы IEn автоматически регулируемого устройства Аn. Выходные сигналы автоматически регулируемого устройства Аn обозначаются как IAn. Автоматически регулируемое устройство Аn автономно оптимизирует работу рабочего агрегата 30, то есть автоматически регулируемое устройство Аn выполнено с возможностью непрерывного автономного определение и задание необходимых настроек рабочих параметров рабочего агрегата 30. Автоматически регулируемое устройство Аn предоставляет рабочие параметры, оптимально адаптированы к текущим условиям эксплуатации и уборочных работ.
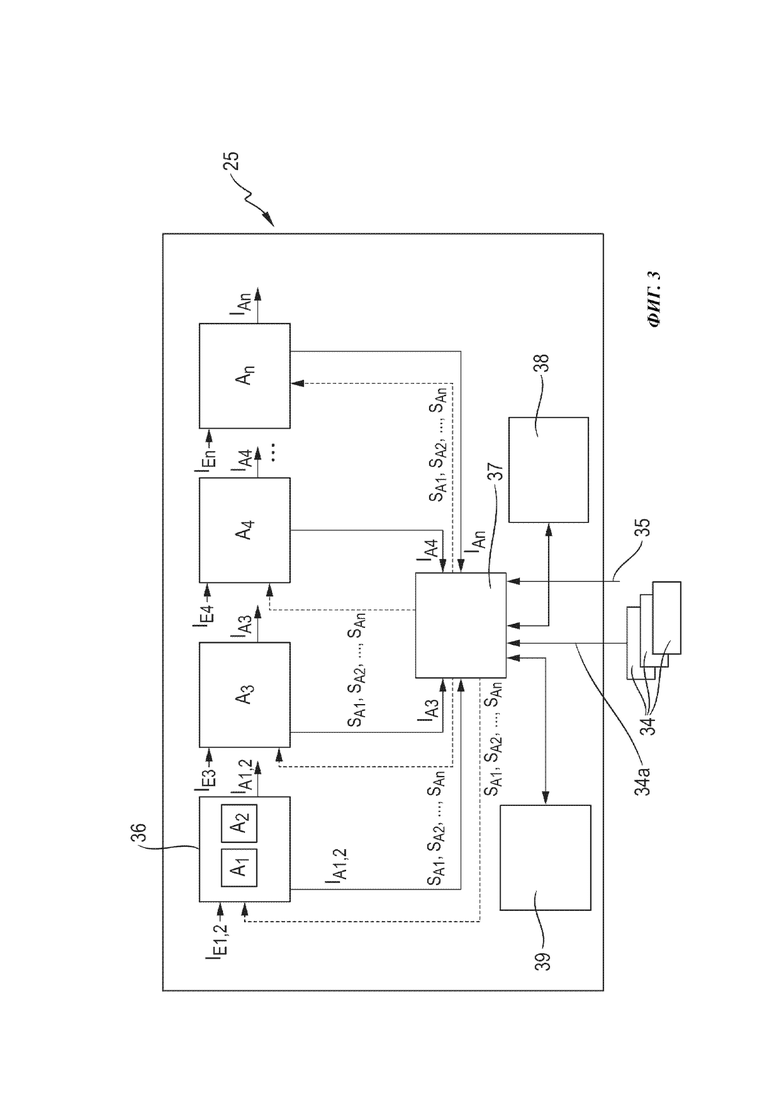
На фигуре 3 схематично изображена структура системы 25 помощи водителю. Система 25 помощи водителю содержит несколько автоматически регулируемых устройств А1, А2, А3, А4, …, Аn. По существу, каждое из автоматически регулируемых устройств А1, А2, А3, А4, …, Аn способно работать автономно. Тем не менее, можно объединить два автоматически регулируемых устройства A1, А2 в единый блок, что показано в качестве примера на фигуре 3. Объединение двух автоматически регулируемых устройств A1, А2 имеет смысл в том случае, если прямое взаимодействие или зависимость между двумя этими автоматически регулируемыми устройствами А1, А2 не обеспечивает дополнительные преимущества при оптимизации по отдельности. Так, в кормоуборочном комбайне 1 автоматически регулируемое устройство A1, выполненное в виде автоматического навесного устройства и служащее для оптимизации рабочих параметров навесного устройства 2, и автоматически регулируемое устройство А2, выполненное в виде автоматического втягивающего устройства и служащее для оптимизации рабочих параметров втягивающего устройства 3, объединены в едином автоматически регулируемом устройстве, называемом автоматическим подающим устройством 36.
Система 25 помощи водителю содержит вычислительное устройство 37, запоминающее устройство 38 и графический интерфейс 39 пользователя. Вычислительное устройство 37 предназначено для обработки данных, сохраненных в запоминающем устройстве 38. Кроме того, вычислительное устройство 37 системы 25 помощи водителю принимает и обрабатывает данные 34а системы 34 датчиков, а также предоставленную внешнюю информацию 35.
Система 25 помощи водителю содержит наборы правила, сохраненные в запоминающем устройстве 38 и/или ячейке памяти блоков 33 управления автоматически регулируемых устройств А1, А2, А3, А4, …, Аn и связанным с соответствующими автоматически регулируемыми устройствами А1, А2, А3, А4, …, Аn. Набор правил, связанный с соответствующим автоматически регулируемым устройством А1, А2, А3, А4, …, Аn, обеспечивает оптимизацию режима работы соответствующего рабочего агрегата 30 независимо от режима работы других рабочих агрегатов 30. Наборы правил содержат экспертные знания, а также адаптируемые характеристики или семейства характеристик.
В систему 25 помощи водителю, стоящую выше в иерархии, интегрированы автоматически регулируемые устройства А1, А2, А3, А4, …, Аn, причем система 25 помощи водителю позволяет оптимизировать режим работы каждого автоматически регулируемого устройства А1, А2, А3, А4, …, Аn отдельно или в зависимости по меньшей мере от одного другого автоматически регулируемого устройства А1, А2, А3, А4, …, Аn. Таким образом, вышестоящая система 25 помощи водителю подает на каждое автоматически регулируемое устройство Ai, А2, А3, А4, Ап соответствующие входные сигналы IE1, IE2, IE3 IE4, …, IEn, обрабатываемые согласно соответствующему набору правил автоматически регулируемого устройства А1, А2, А3, А4, …, Аn. Для оптимизации режима работы соответствующего автоматически регулируемого устройства А1, А2, А3, А4, …, Аn генерируется выходной сигнал IA1, IA2, IA3, IA4, …, IAn, служащий для управления соответствующим исполнительным механизмом 32 рабочего агрегата 30, управляемого автоматически регулируемым устройством Аь А2, А3, А4, Ап.
Кроме того, выходные сигналы IA1, IA2, IA3, IA4, …, IAn передаются на вычислительное устройство 37 системы 25 помощи водителю. Система 25 помощи водителю передает выходные сигналы IA1, IA2, IA3, IA4, …, IAn в качестве дополнительных управляющих входных сигналов SA1, SA2, SA3, SA4, …, SAn на другие автоматически регулируемые устройства А1, А2, А3, А4, …, Аn. В результате система 25 помощи водителю и автоматически регулируемые устройства А1, А2, А3, А4, …, Аn получают дополнительную информацию, что позволяет учитывать влияние измененных настроек рабочего агрегата 30 на один или нескольких других рабочих агрегатов 30 во время их оптимизации.
Графический интерфейс 39 пользователя системы 25 помощи водителю используется для связи между оператором кормоуборочного комбайна 1 и системой 25 помощи водителю. Под связью понимают визуализацию зарегистрированных датчиками данных, рабочих параметров, параметров уборочного процесса, режимов работы, доступных для выбора стратегий и другой информации, необходимой оператору для работы и принятия решений по управлению рабочими агрегатами 30 и кормоуборочным комбайном 1.
Связь между оператором и системой 25 помощи водителю может осуществляться в интерактивном режиме на естественном языке в форме диалога. Под связью также понимают ручной ввод оператором команд, подтверждений выбора, данных и прочего, что также по меньшей мере частично осуществляется в диалоговой форме. Для этого система 25 помощи водителю содержит диалоговый модуль 40, позволяющий оператору управлять системой 25 помощи водителю в форме диалога. Кроме того, система 25 помощи водителю может работать в автоматическом режиме. Диалоговый модуль 40 активируется оператором или, в автоматическом режиме, автоматически при распознавании критического режима работы кормоуборочного комбайна 1 или по меньшей мере одного рабочего агрегата 30.
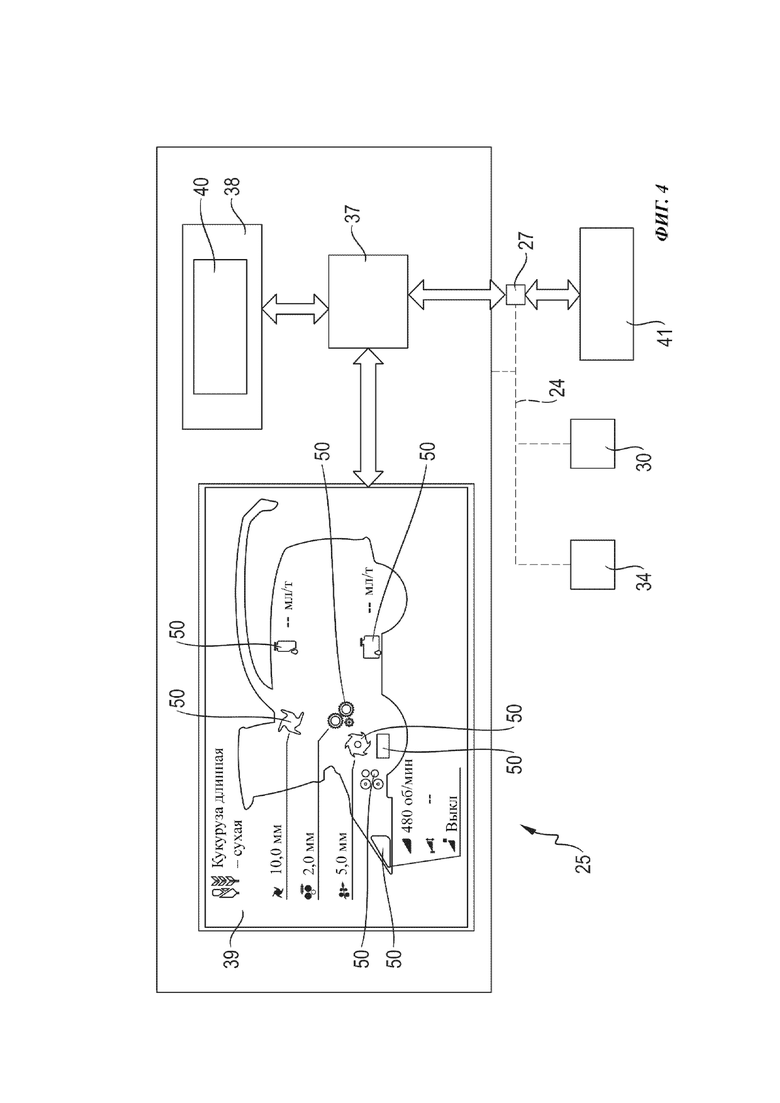
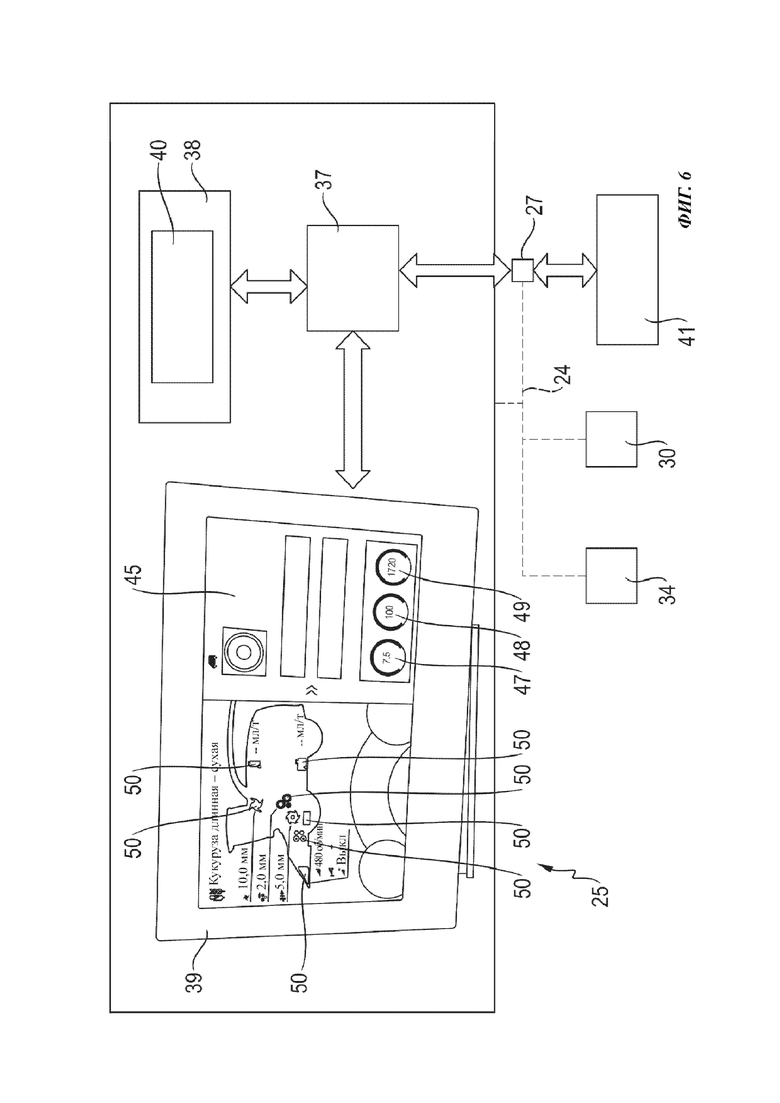
На фигуре 4 схематично изображен графический интерфейс 39 пользователя системы 25 помощи водителю согласно фигуре 3. Диалоговый модуль 40, хранящийся в запоминающем устройстве 38, выполняется вычислительным устройством 37 и обеспечивает взаимодействие оператора с системой 25 помощи водителю на естественном языке. Графический интерфейс 39 пользователя показывает, например, обзор информации о кормоуборочном комбайне 1, в частности, о скорости движения и частоте вращения приводного устройства 19 и рабочих агрегатов 30. Для этого кормоуборочный комбайн 1 изображается в упрощенном графическом виде. Отдельные рабочие агрегаты 30 кормоуборочного комбайна 1, информация об установленных рабочих параметров которых отображается на дисплее, визуально выделяются, например, пиктограммами 50. Устройство 23 ввода/вывода системы 25 помощи водителю, выполненное в виде сенсорного дисплея, позволяет оператору активировать диалоговый модуль 40 посредством целенаправленного выбора отдельных пиктограмм 50.
Например, на фигуре 4 показаны пиктограммы 50 для втягивающего устройства 3, измельчающего устройства 6, устройства 10 дополнительной обработки и устройства 11 дополнительного ускорения. Для этих рабочих агрегатов 30 отображаются по меньшей мере частично соответствующие рабочие параметры, в частности, расстояние между валками первой пары валков 4а, 4b и второй пары валков 5а, 5b втягивающего устройства 3, а также между валками устройства 10 дополнительной обработки. Кроме того, пиктограммой 50 обозначается затачивающее устройство, предназначенное для затачивания измельчающих ножей 8 измельчающего устройства 6.
Кроме того, на фигуре 4 схематично изображено мобильное устройство 41 обработки данных, которое может быть подключено к системе 25 помощи водителю посредством модуля 27 связи с возможностью передачи сигналов. Мобильное устройство 41 обработки данных, предпочтительно, представляет собой смартфон, планшет или иное подобное устройство, что позволяет использовать его, в том числе, вне кормоуборочного комбайна 1. Мобильное устройство 41 обработки данных обычно содержит сенсорный дисплей, который, таким образом, также выполнен с возможностью ввода данных.
Блок связи 27 содержит по меньшей мере один первый интерфейс, выполненный с возможностью подключения к системе 24 шин кормоуборочного комбайна 1, что позволяет принимать передаваемые через систему 24 шин сигналы рабочих агрегатов 30, систем 34 датчиков и автоматически регулируемых устройств А1, А2, А3, А4, …, Аn. Второй интерфейс служит для обработки и подготовки сигналов системы 24 шин, а также для беспроводной передачи сигналов на мобильное устройство 41 обработки данных. Блок 27 связи соединен с системой 25 помощи водителю с возможностью передачи данных, благодаря чему данные, сгенерированные мобильным устройством 41 обработки данных, могут быть переданы в систему 25 помощи водителю, в частности, в диалоговый модуль 40 с помощью блока 27 связи.
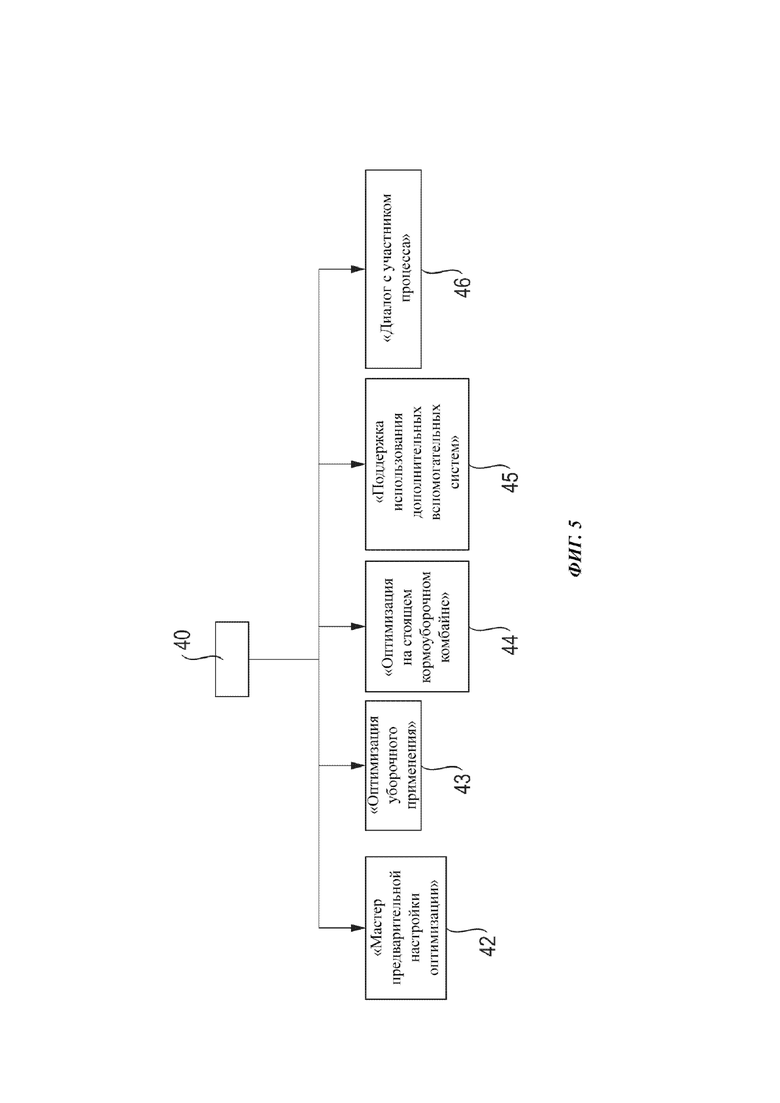
При активации диалоговый модуль 40 предлагает различные поддиалоги, которые в зависимости от рабочей ситуации кормоуборочного комбайна 1 доступны постоянно или могут зависеть от наличия определенной рабочей ситуации. Обзор возможных поддиалогов приведен на фигуре 5. Так, предусмотрены поддиалоги «Мастер предварительной настройки оптимизации» 42, «Оптимизация уборочного применения» 43, «Оптимизация на стоящем кормоуборочном комбайне» 44, «Поддержка использования дополнительных вспомогательных систем» 45 и «Диалог с участником процесса» 46.
Поддиалог «Мастер предварительной настройки оптимизации» 42 позволяет оператору подготовить, переоснастить или обслужить кормоуборочный комбайн 1 в диалоговом режиме до начала уборки культуры. Переоснащение может иметь смысл, например, при переходе от уборки кукурузы к уборке травы, для чего требуется убрать устройство 10 дополнительной обработки из потока убираемой культуры. Кроме того, для такой смены убираемой культуры требуется другое навесное устройство 2, которое уже навешено на кормоуборочный комбайн 1 с тем, чтобы комбайн доставил его до места использования.
Поддиалог «Оптимизация уборочного применения» 43 является основным, поскольку в этом поддиалоге 43 производится оптимизация рабочих агрегатов 30. Кроме того, этот поддиалог 43 предлагает дополнительные возможности оптимизации, требующие ручного вмешательства оператора на стоящем кормоуборочном комбайне 1. К таким дополнительным возможностям оптимизации может относиться, например, регулировка скребков на питающем барабане навесного устройства, выполненного в виде кукурузной приставки, или регулировка расстояния от направляющих пальцев. Поскольку такие дополнительные возможности оптимизации могут быть реализованы только тогда, когда кормоуборочный комбайн 1 и его рабочие агрегаты 30 неподвижны, эти дополнительные возможности оптимизации могут быть сохранены в запоминающем устройстве 38 как задачи и отображены в графическом интерфейсе 39 пользователя как подлежащие выполнению задачи.
При этом мобильное устройство 41 обработки данных упрощает выполнение этой задачи, так как мобильное устройство 41 обработки данных может быть вынесено за пределы кормоуборочного комбайна 1 и способно обмениваться данными с кормоуборочным комбайном 1 или его рабочими агрегатами 30 и системой 25 помощи водителю через блок 27 связи.
Поддиалог «Оптимизация на стоящем кормоуборочном комбайне» 44 позволяет вывести оператору пошаговое руководство по выполняемым вручную дополнительным возможностям оптимизации, дополненное информацией о пользе дополнительной возможности оптимизации и иллюстрациями.
Поддиалог «Поддержка использования дополнительных вспомогательных систем» 45 предоставляет оператору помощь в настройке дополнительных вспомогательных систем, не участвующих непосредственно в оптимизации работы рабочих агрегатов 30. Так, для кормоуборочного комбайна 1 существует вспомогательная система перегрузки, контролирующая процесс перегрузки измельченной убираемой культуры на транспортное средство с целью сведения к минимуму потерь убираемой культуры. Следующая дополнительная вспомогательная система представляет собой вспомогательную систему скорости движения, позволяющую автоматически регулировать скорость движения при заданной оператором нагрузке на приводном устройстве 19 в зависимости от производительности обработки убираемой культуры и нагрузки.
Поддиалог «Диалог с участником процесса» 46 позволяет расширить диапазон системы 25 помощи водителю за пределы рабочих агрегатов 30 кормоуборочного комбайна 1, чтобы оптимизировать настройку рабочих агрегатов 30, на которые могут влиять результаты последующих процессов обработки убираемой культуры. Например, уплотняемость убираемой культуры в силосе определяется длиной измельчения. В этом случае в нижних слоях силоса может уплотняться культура с большей длиной измельчения, в то время как с увеличением высоты слоя длина измельчения должна уменьшаться, чтобы обеспечить или сохранить сопоставимую уплотняемость. Поддиалог «Диалог с участником процесса» 46 дает водителю уплотняющей машины в силосе, выступающему в качестве участника технологического процесса, возможность получения от оператора кормоуборочного комбайна 1 информации об этом измененном требовании. Оператору кормоуборочного комбайна 1 это измененное требование выводится в графическом интерфейсе 39 пользователя. С помощью системы 25 помощи водителю оператор кормоуборочного комбайна 1 может соответствующим образом регулировать длину измельчения в соответствии с требованием, причем настройки рабочих параметров рабочих агрегатов 30, взаимодействие которых влияет на длину измельчения, оптимизируются соответствующими автоматически регулируемыми устройствами А1, А2, А3, А4, …, Аn.
На фигуре 6 схематично изображен графический интерфейс 39 пользователя системы 25 помощи водителю согласно фигуре 4 с выбранным поддиалогом «Поддержка использования дополнительных вспомогательных систем» 45. Показана вспомогательная система скорости движения, автоматически регулирующая скорость 47 движения. Оператор может установить требуемую нагрузку на приводном устройстве 19, соответственно установив частоту 49 вращения привода. После этого приводное устройство 19 кормоуборочного комбайна 1 будет постоянно стремиться к соответствию заданной нагрузке. В случае внезапного увеличения плотности посадки скорость 47 движения автоматически уменьшается. Когда плотность посадки уменьшится, вспомогательная система скорости движения снова начнет увеличивать скорость 47 движения кормоуборочного комбайна 1 до тех пор, пока не будет достигнута предварительно заданная нагрузка приводного устройства 19. При этом регулирование основано на определении объема 48 обработки и частоты вращения 49 привода, соответствующей нагрузке.
К автоматически регулируемым устройствам А1, А2, А3, А4, …, Аn, интегрированным в систему 25 помощи водителю, помимо автоматического подающего устройства, в котором функционально объединены автоматическое навесное устройство и автоматическое втягивающее устройство, относится автоматическое измельчающее устройство, автоматическое затачивающее устройство, автоматическое устройство дополнительной обработки, автоматическое устройство силосования, автоматическое выбрасывающее устройство и автоматическое устройство оптимизации вспомогательных агрегатов.
Автоматическое измельчающее устройство оптимизирует длину измельчения в зависимости от выбранной стратегии, специфической для рабочего агрегата. Длина измельчения регулируется при выборе стратегии «производительность» или «качество работы», в основе которой лежит параметр уборочного процесса «уплотняемость» или «производительность на единицу площади». При выборе стратегии «качество работы» система стремится достигнуть требуемой уплотняемости убираемой культуры, что может быть реализовано при определенном датчиками относительном содержании сухого вещества и соответствующей ему длине измельчения. Взаимосвязь между уплотняемостью, относительным содержанием сухого вещества и длиной измельчения может быть сохранена в виде по меньшей мере одного семейства характеристик, составляющего существенную часть набора правил автоматического измельчающего устройства. При выборе стратегии «производительность» на первый план выходит эффективность работы кормоуборочного комбайна 1. Для получения максимально возможной производительности на единицу площади расход топлива необходимо свести к минимуму, так чтобы установить длину измельчения такой, какая необходима для уплотняемости.
На качество процесса измельчения и потребляемую мощность измельчающего устройства 6, влияет острота измельчающих ножей 8, а также положение или расстояние противорежущей пластины 9 до огибающей окружности вращающихся измельчающих ножей 8. В этот момент включается автоматическое затачивающее устройство, автоматически инициирующее затачивание измельчающих ножей или по меньшей мере предлагающее оператору заточить ножи, если этого требует качество и/или потребляемая мощность измельчающего устройства 6. Поскольку затачивание измельчающих ножей 8 и возможное перемещение противорежущей пластины 9 могут привести к прерыванию уборочного процесса, сроки выполнения затачивания и регулировки противорежущей пластина координируются системой 25 помощи водителю, стоящей выше этих операций в иерархии управления.
Длина измельчения и качество процесса измельчения отслеживаются, в частности, системой 34 оптических датчиков, данные которой передаются на автоматическое подающее устройство, автоматическое измельчающее устройство и автоматическое затачивающее устройство.
При уборке кукурузы можно использовать устройство 10 дополнительной обработки, служащее для измельчения зерна. Устройство 10 дополнительной обработки управляется или регулируется автоматическим устройством дополнительной обработки. При этом степень измельчения зерна регистрируется как параметр уборочного процесса системой 34 датчиков, одновременно служащей для отслеживания и определения длины измельчения. Автоматическое устройство дополнительной обработки управляет или регулирует расстояние между валками устройства 10 дополнительной обработки. Кроме того, может быть предусмотрен вариант, в котором автоматическое устройство дополнительной обработки также регулирует передаточное соотношение между частотами вращения. Управление устройством 10 дополнительной обработки также осуществляют на основании доступных для выбора стратегий, специфических для рабочего агрегата. При этом, в частности, стратегии «качество работы» и «производительность» противоречат друг другу. Увеличение степени измельчения зерна требует уменьшения зазора между валками, в результате чего потребляемая мощность устройства 10 дополнительной обработки значительно возрастает для заданной производительности обработки убираемой культуры. Автоматическое устройство дополнительной обработки позволяет определять на основании данных о степени измельчения зерна, предоставляемых системой 34 датчиков, настройки, при которых может быть достигнуто достаточная степень измельчения зерна при минимально возможной потребляемой мощности.
При подготовке к закладке измельченной культуры в силос культуру в кормоуборочном комбайне 1 обрабатывают силосующим средством, в частности, ускоряющим процесс ферментации и увеличивающим срок хранения убираемой культуры. Силосующее средство или смесь силосующего средства с водой наносят на проходящий поток убираемой культуры с помощью устройства 14 дозирования силосующего средства. Датчик 17 выполнен с возможностью регистрации составляющих измельченной убираемой культуры. На основании анализа устройство 14 дозирования силосующего средства управляется автоматическим силосующим устройством, чтобы выполнить оптимизацию в рамках выбранной стратегии «качество работы», то есть обеспечить хорошую силосуемость, или «затраты», то есть обеспечить минимально возможный расход силосующего средства.
Автоматическое выбрасывающее устройство управляет или регулирует устройство 11 дополнительного ускорения и выбрасывающее устройство 13 с учетом противоречащих друг другу стратегий «эффективность» и «производительность». С помощью дополнительной системы 34 датчиков, которая может быть соединена с выбрасывающим устройством, можно определять и отслеживать скорость и поведение потока или потока убираемой культуры. Набор правил, специфический для выбрасывающего устройства, позволяет определить настройки, которые, с одной стороны, обеспечивают достаточные характеристики потока, а с другой стороны - минимально возможную потребляемую мощность устройства 11 дополнительного ускорения.
Задача автоматического устройства оптимизации вспомогательных агрегатов заключается в том, чтобы обеспечить дальнейшую оптимизацию в отношении «качества работы», «производительности» и «эффективности» дополнительно к центральным автоматически регулируемым устройствам А1, А2, А3, А4, …, Аn соответствующих рабочих агрегатов 30. В основе набора правил автоматического устройства оптимизации вспомогательных агрегатов лежат те же условия, что и в основе других наборов правил автоматически регулируемых устройств А1, А2, А3, А4, …, Аn. Например, автоматическое устройство оптимизации вспомогательных агрегатов может получать соответствующие данные 34а датчика, специфические для производительности обработки, от системы 34 датчиков, определяющей производительность обработки убираемой культуры, для регулирования деки барабана измельчающего устройства 6 в зависимости от производительности обработки, что позволяет уменьшить потребляемую мощность измельчающего устройства 6. Также возможен вариант, в котором во время уборки травы расстояние от стенки подающей шахты 12 до устройства 11 дополнительного ускорения будет регулироваться с целью повышения скорости на выходе.
Список ссылочных обозначений
1 - кормоуборочный комбайн
2 - навесное устройство
3 - втягивающее устройство 4а валок
4b - валок
5а - валок
5b - валок
6 - измельчающее устройство
7 - измельчающий барабан
8 - измельчающий нож
9 - противорежущая пластина
10 - устройство дополнительной обработки
11 - устройство дополнительного ускорения
12 - подающая шахта
13 - выбрасывающее устройство
14 - устройство дозирования силосующего средства
15 - нагнетательный насос
16 - инжектор
17 - датчик
18 - датчик
19 - приводное устройство
20 - ременной привод
21 - ходовой привод
22 - кабина
23 - устройство ввода/вывода
24 - система шин
25 - система помощи водителю
26 - датчик
27 - блок связи
30 - рабочий агрегат
31 - средство обработки убираемой культуры
32 - исполнительный механизм
33 - блок управления 33а управляющий сигнал
34 - система датчиков 34а данные датчиков
35 - внешняя информация
36 - автоматическое подающее устройство
37 - вычислительное устройство
38 - запоминающее устройство
39 - графический интерфейс пользователя
40 - диалоговый модуль
41 - мобильное устройство обработки данных
42 - поддиалог
43 - поддиалог
44 - поддиалог
45 - поддиалог
46 - поддиалог
47 - скорость движения
48 - объем обработки
49 - частота вращения привода
50 - пиктограмма
А1 - автоматически регулируемое устройство
А2 - автоматически регулируемое устройство
А3 - автоматически регулируемое устройство
А4 - автоматически регулируемое устройство
Аn - автоматически регулируемое устройство
IЕ1 - входной сигнал
IЕ2 - входной сигнал
IE3 - входной сигнал
IE4 - входной сигнал
IEn - входной сигнал
IA1 - выходной сигнал
IA2 - выходной сигнал
IА3 - выходной сигнал
IА4 - выходной сигнал
IАn - выходной сигнал
SA1 - входной управляющий сигнал
SA2 - входной управляющий сигнал
SA3 - входной управляющий сигнал
SA4 - входной управляющий сигнал
SAn - входной управляющий сигнал
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2019 |
|
RU2796063C2 |
| КОРМОУБОРОЧНЫЙ КОМБАЙН | 2018 |
|
RU2779653C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
| Кормоуборочный комбайн и способ его перемещения | 2018 |
|
RU2770005C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2019 |
|
RU2800730C2 |
| КОРМОУБОРОЧНЫЙ КОМБАЙН | 1998 |
|
RU2137341C1 |
| СПОСОБ РАБОТЫ ЗЕРНОУБОРОЧНОГО КОМБАЙНА И ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2016 |
|
RU2758094C2 |
| КОРМОУБОРОЧНЫЙ КОМБАЙН | 2018 |
|
RU2688490C1 |
| КОРМОУБОРОЧНЫЙ КОМБАЙН И СПОСОБ ЕГО ПЕРЕОСНАСТКИ | 2018 |
|
RU2762834C1 |
| СИСТЕМА ПРИВОДА ДЛЯ КОРМОУБОРОЧНОГО КОМБАЙНА И КОРМОУБОРОЧНЫЙ КОМБАЙН С ТАКОЙ СИСТЕМОЙ ПРИВОДА | 2021 |
|
RU2833824C2 |
Изобретение относится к кормоуборочному комбайну. Комбайн содержит несколько рабочих агрегатов для осуществления процесса обработки убираемой культуры, систему (25) помощи водителю, содержащую запоминающее устройство (38) для сохранения данных, вычислительное устройство (37) для обработки сохраненных в запоминающем устройстве данных и графический интерфейс (39) пользователя. Рабочие агрегаты включают в себя по меньшей мере одно регулируемое средство обработки убираемой культуры, по меньшей мере один исполнительный механизм для настройки и/или приведения в действие по меньшей мере одного средства обработки убираемой культуры и блок управления для управления исполнительным механизмом. При этом соответствующий рабочий агрегат выполнен в виде автоматически регулируемого устройства (А1, А2, А3, А4, Аn) и интегрирован в систему (25) помощи водителю, стоящую выше в иерархической системе управления. Посредством системы (25) помощи водителю предусмотрена возможность оптимизации работы каждого автоматически регулируемого устройства (A1, А2, А3, А4, Аn) по отдельности или в зависимости по меньшей мере от одного другого автоматически регулируемого устройства (A1, А2, А3, А4, Аn). Изобретение позволит повысить эффективность рабочего процесса комбайна. 2 н. и 21 з.п. ф-лы, 6 ил. 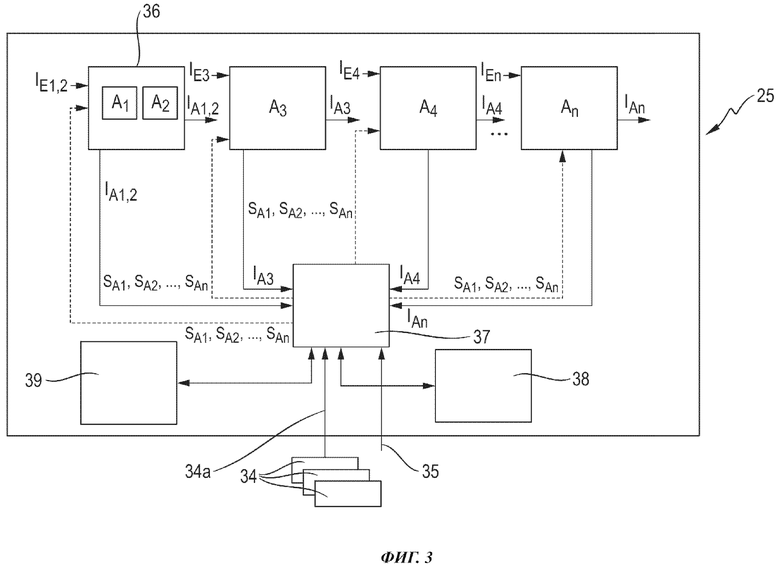
1. Кормоуборочный комбайн (1), содержащий:
- несколько рабочих агрегатов (30) для осуществления процесса обработки убираемой культуры,
- систему (25) помощи водителю, содержащую запоминающее устройство (38) для сохранения данных, вычислительное устройство (37) для обработки сохраненных в запоминающем устройстве данных и графический интерфейс (39) пользователя,
- причем рабочие агрегаты (30) включают в себя по меньшей мере одно регулируемое средство (31) обработки убираемой культуры, по меньшей мере один исполнительный механизм (32) для настройки и/или приведения в действие по меньшей мере одного средства (31) обработки убираемой культуры и блок (33) управления для управления исполнительным механизмом (32),
отличающийся тем, что
соответствующий рабочий агрегат (30) выполнен в виде автоматически регулируемого устройства (А1, А2, А3, А4, An) и интегрирован в систему (25) помощи водителю, стоящую выше в иерархической системе управления, причем посредством системы (25) помощи водителю предусмотрена возможность оптимизации работы каждого автоматически регулируемого устройства (А1, А2, А3, А4, An) по отдельности или в зависимости по меньшей мере от одного другого автоматически регулируемого устройства (А1, А2, A3, A4, An).
2. Комбайн (1) по п. 1, отличающийся тем, что система (25) помощи водителю в запоминающем устройстве (38) или ячейке памяти блоков (33) управления содержит сохраненные наборы правил, назначенные соответствующим автоматически регулируемым устройствам (А1, А2, А3, А4, An), причем набор правил, назначенный соответствующим автоматически регулируемым устройствам (А1, А2, А3, А4, An), обеспечивает оптимизацию работы соответствующего рабочего агрегата (30) независимо от работы других рабочих агрегатов (30).
3. Комбайн (1) по п. 1 или 2, отличающийся тем, что система (25) помощи водителю для оптимизации работы отдельных рабочих агрегатов (30) содержит доступные для выбора стратегии, специфические для рабочих агрегатов и сохраненные в запоминающем устройстве (38).
4. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что активирование системы (25) помощи водителю предусмотрено с помощью оператора или за счет распознавания критического режима работы кормоуборочного комбайна (1).
5. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что система (25) помощи водителю выполнена с возможностью управления автоматически регулируемыми устройствами (А1, А2, А3, А4, An) кормоуборочного комбайна (1) в качестве диспетчера, так что предусмотрена возможность оптимизации всего рабочего процесса кормоуборочного комбайна (1).
6. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что каждому по меньшей мере из части рабочих агрегатов (30) назначена система (34) датчиков, выполненная с возможностью регистрации сигналов для определения рабочих параметров, а также параметров, специфических для рабочего агрегата, причем система (25) помощи водителю выполнена с возможностью приема и анализа сигналов соответствующей системы (34) датчиков.
7. Комбайн (1) по п. 6, отличающийся тем, что системы (34) датчиков выполнены с возможностью подачи сигналов, зарегистрированных от соответствующего рабочего агрегата (30), в качестве входных сигналов (IE1, IE2, IE3, IE4, IEn) на соответствующие автоматически регулируемые устройства (А1, А2, А3, А4, An) для определения параметров уборочного процесса, специфических для рабочего агрегата.
8. Комбайн (1) по п. 7, отличающийся тем, что система (25) помощи водителю выполнена с возможностью подачи выходных сигналов соответствующего автоматически регулируемого устройства (А1, А2, А3, А4, An) на другие автоматически регулируемые устройства (А1, А2, А3, А4, An) в качестве дополнительных входных сигналов (SA1, SA2, SA3, SA4, SAn) управления.
9. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что предусмотрена возможность объединения системы (25) помощи водителю в сеть с дополнительными вспомогательными системами, служащими для управления или регулирования приводного устройства, шасси, системы рулевого управления, перегрузочной системы и/или системы удерживания колеи.
10. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что в качестве рабочих агрегатов (30) предусмотрены по меньшей мере одно навесное устройство (2), втягивающее устройство (3), измельчающее устройство (6), затачивающее устройство, устройство (11) дополнительного ускорения и выбрасывающее устройство (13).
11. Комбайн (1) по п. 10, отличающийся тем, что в качестве дополнительных рабочих агрегатов (30) предусмотрены устройство (10) дополнительной обработки и/или устройство (14) дозирования силосующего средства.
12. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что в качестве автоматически регулируемого устройства (А1, А2, А3, А4, An) предусмотрены автоматическое навесное устройство и автоматическое втягивающее устройство.
13. Комбайн (1) по п. 12, отличающийся тем, что автоматическое навесное устройство и автоматическое втягивающее устройство функционально объединены в автоматическом подающем устройстве (36).
14. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что в качестве автоматически регулируемого устройства (А1, А2, А3, А4, An) предусмотрены автоматическое измельчающее устройство и/или автоматическое затачивающее устройство.
15. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что в качестве автоматически регулируемого устройства (А1, А2, А3, А4, An) предусмотрены автоматическое устройство дополнительной обработки и/или автоматическое устройство силосования.
16. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что в качестве автоматически регулируемого устройства (А1, А2, А3, А4, An) предусмотрены автоматическое выбрасывающее устройство и/или автоматическое устройство оптимизации вспомогательных агрегатов.
17. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что система (25) помощи водителю содержит диалоговый модуль (40), который служит для управления в диалоговом режиме системой (25) помощи водителю посредством оператора.
18. Комбайн (1) по п. 17, отличающийся тем, что управление в режиме диалога между системой (25) помощи водителю и оператором реализовано на естественном языке.
19. Комбайн (1) по одному из предыдущих пунктов, отличающийся тем, что система (25) помощи водителю выполнена с возможностью соединения с мобильным устройством (41) обработки данных для осуществления двусторонней связи, причем мобильное устройство (41) обработки данных имеет графический интерфейс пользователя и выполнено с возможностью визуализации и дистанционного выполнения по меньшей мере функций системы (25) помощи водителю кормоуборочного комбайна (1).
20. Комбайн (1) по п. 19, отличающийся тем, что кормоуборочный комбайн (1) содержит блок (27) связи, оснащенный по меньшей мере первым интерфейсом, выполненным с возможностью соединения с системой (24) шин кормоуборочного комбайна (1), и по меньшей мере вторым интерфейсом для обработки и подготовки сигналов системы (24) шин и их передачи на мобильное устройство (41) обработки данных.
21. Комбайн (1) по п. 19 или 20, отличающийся тем, что мобильное устройство (41) обработки данных содержит запоминающее устройство, в котором предусмотрена возможность сохранения с возможностью вызова аудиовизуальных последовательностей.
22. Комбайн (1) по одному из пп. 19-21, отличающийся тем, что мобильное устройство (41) обработки данных выполнено с возможностью эксплуатации независимо от рабочего состояния кормоуборочного комбайна (1).
23. Способ оптимизации рабочего процесса кормоуборочного комбайна по одному из предыдущих пунктов, содержащий:
a) анализ работы кормоуборочного комбайна (1) и идентификацию критического режима работы;
b) отработку по меньшей мере одного набора правил, сохраненного в вычислительном устройстве (37), для преодоления критического режима работы путем предложения оптимизированных рабочих параметров одного или нескольких рабочих агрегатов (30) с учетом взаимодействия между рабочими агрегатами (30);
c) визуализацию эффекта взаимодействия;
d) автоматическую или предпринятую оператором регулировку оптимизированных рабочих параметров, сгенерированных на этапе b), на одном или нескольких рабочих агрегатах и эксплуатацию кормоуборочного комбайна (1) с оптимизированными рабочими параметрами; и
e) оценку и проверку работы кормоуборочного комбайна (1) после выполненной регулировки оптимизированных рабочих параметров по меньшей мере на одном рабочем агрегате (30).
| DE 102015122269 A1, 22.06.2017 | |||
| US 20170090445 A1, 30.03.2017 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛЕВОГО ЗНАЧЕНИЯ ПАРАМЕТРА УПРАВЛЕНИЯ РАБОЧЕГО АГРЕГАТА УБОРОЧНОЙ СЕЛЬХОЗМАШИНЫ, УСТРОЙСТВО УПРАВЛЕНИЯ РАБОЧИМ АГРЕГАТОМ И УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2006 |
|
RU2403698C2 |
| Полировальный станок | 1930 |
|
SU22507A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ УБОРОЧНОЙ МАШИНЫ | 1994 |
|
RU2078170C1 |

