Область изобретения
[0001] Настоящее изобретение относится к области строительного оборудования и, в частности, к способу управления колебаниями стрелы, устройству, инженерной машине и машиночитаемому носителю информации.
Предпосылки
[0002] Пожарная машина с выдвижной лестницей является пожарной машиной с подъемником, выполняющей функции тушения пожара и спасения, и характеризуется главным образом быстродействием и эффективными спасательными функциями. Стрела (также именуемая рамой лестницы) пожарной машины с выдвижной лестницей, как главный несущий компонент, имеет малый вес и низкую жесткость. В известной изобретателю пожарной машине с выдвижной лестницей, после того как оператор выдает команду на остановку движения стрелы, стрела может начать совершать колебания с большой амплитудой и с низкой частотой в течение некоторого времени из-за е структурной гибкости. Чем длиннее стрела пожарной машины с выдвижной лестницей, тем более очевидны колебания
Краткое описание изобретения
[0003] Согласно одному аспекту настоящего изобретения предлагается способ управления колебаниями стрелы, содержащий этапы, на которых:
[0004] получают первый входной сигнал от рукоятки;
[0005] выполняют входное формирование первого входного сигнала для получения второго входного сигнала для ограничения амплитудного коэффициента остаточных колебаний так, чтобы она не превышала пороговый амплитудный коэффициент остаточных колебаний;
[0006] определяют сигнал запроса на расход гидравлического привода для приведения в действие стрелы в соответствии со вторым входным сигналом и максимальным расходом гидравлического привода;
[0007] определяют входной сигнал напряжения клапана управления расходом, соединенного с гидравлическим приводом в соответствии с сигналом запроса на расход и функцией компенсации расхода, где функция компенсации расхода является обратной функцией от функции характеристической кривой расхода клапана управления расходом; и
[0008] управляют клапаном управления расходом так, чтобы он действовал в соответствии с входным сигналом напряжения.
[0009] В некоторых вариантах первый входной сигнал является первым сигналом процента раскрытия, а второй входной сигнал является вторым сигналом процента раскрытия; и
[0010] выполнение входного формирования первого входного сигнала для получения второго входного сигала содержит этапы, на которых:
[0011] свертывают первый сигнал процента раскрытия последовательностью импульсов входного формирователя заданной нечувствительности для получения второго сигнала процента раскрытия,
[0012] где амплитуду и задержку входного формирователя заданной нечувствительности определяют в соответствии с кривой чувствительности входного формирователя заданной нечувствительности и функцией амплитуды остаточных колебаний стрелы.
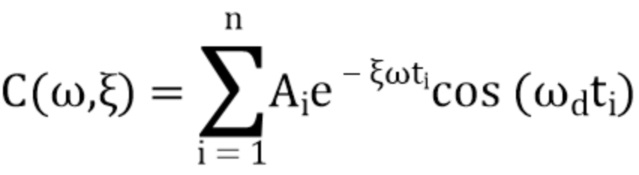
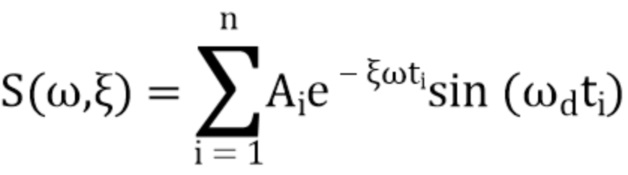
[0013] В некоторых вариантах функцией амплитуды остаточных колебаний является:

[0014] В этом уравнении,
[0015] где ω - частота колебаний стрелы, ξ - коэффициент демпфирования стрелы, V(ω,ξ) - функция величины остаточных колебаний стрелы, Ai - амплитуда последовательности импульсов, ti - задержка последовательности импульсов, n - количество импульсов, и ωd=  .
.
[0016] В некоторых вариантах уравнениями ограничений последовательности импульсов входного формирователя заданной нечувствительности являются:
[0017] где ω - частота колебаний стрелы, ξ - коэффициент демпфирования колебаний стрелы, Vtol - пороговый амплитудный коэффициент остаточных колебаний стрелы, и Ai - амплитуда последовательности импульсов входного формирователя заданной нечувствительности,  ,
,  ,
,  ,
,  и
и  - базовая применимая частота, максимальная применимая частота, частота, соответствующая первой амплитуде и частота, соответствующая второй амплитуде входного формирователя заданной нечувствительности, соответственно.
- базовая применимая частота, максимальная применимая частота, частота, соответствующая первой амплитуде и частота, соответствующая второй амплитуде входного формирователя заданной нечувствительности, соответственно.
[0018] В некоторых вариантах коэффициент демпфирования колебаний равна ξ-0, а решение входного формирователя заданной нечувствительности равна:


[0019] где Vtol - пороговый амплитудный коэффициент остаточных колебаний стрелы, Ai - амплитуда последовательности импульсов входного формирователя заданной нечувствительности, ti - задержка последовательности импульсов входного формирователя заданной нечувствительности, и T - период колебаний стрелы.
[0020] В некоторых вариантах способ управления колебаниями стрелы содержит этапы, на которых:
[0021] перед формированием первого входного сигнала, определяют период колебаний стрелы в соответствии с длиной стрелы и соответствующее отношение между длиной стрелы и периодом колебаний стрелы.
[0022] В некоторых вариантах получение первого входного сигнала содержит этапы, на которых:
[0023] получают сигнал измерения раскрытия от рукоятки; и
[0024] получают первый сигнал процента раскрытия в соответствии с сигналом изменения раскрытия.
[0025] В некоторых вариантах получение первого входного сигнала далее содержит этапы, на которых:
[0026] буферируют первый сигнал процента раскрытия.
[0027] В некоторых вариантах первый входной сигнал используют для управления изменением угла наклона стрелы, и гидравлическим приводом является цилиндр изменения угла наклона; и
[0028] где максимальный расход цилиндра изменения угла наклона достигается в соответствии со следующим отношением:

[0029] где Q - расход на цилиндре изменения угла наклона, A - площадь воздействия масла в цилиндре изменения угла наклона, a - расстояние от шарнирной точки на одном конце цилиндра изменения угла наклона до шарнирной точки на проксимальном конце стрелы; b - расстояние от шарнирной точки на другом конце цилиндра изменения угла наклона до шарнирной точки на проксимальном конце стрелы, α - угол между линией, соединяющей шарнирную точку на проксимальном конце стрелы и шарнирную точку одном конце цилиндра изменения вылета, и линией, соединяющей шарнирную точку на проксимальном конце стрелы и шарнирную точку на другом конце цилиндра изменения вылета, Vmax_cage - максимально допустимая линейная скорость дистального конца стрелы, и xladder_length - длина стрелы.
[0030] В некоторых вариантах первый входной сигнал используют для управления поворотом стрелы, и гидравлическим приводом является поворотный гидромотор.
[0031] В некоторых вариантах этап определения сигнала запроса на расход содержит этапы, на которых:
[0032] определяют сигнал запроса на расход в соответствии с произведением второго сигнала процента раскрытия и максимального расхода гидравлического привода.
[0033] Согласно другому аспекту настоящего изобретения предлагается устройство управления колебаниями стрелы, содержащее:
[0034] приемное устройство для получения первого входного сигнала от рукоятки;
[0035] формирующее устройство для входного формирования первого входного сигнала для получения второго входного сигнала для ограничения амплитуды остаточных колебаний стрелы так, чтобы она не превышала пороговую величину;
[0036] первое определяющее устройство для определения сигнала запроса на расход гидравлического привода для приведения в действие стрелы в соответствии со вторым входным сигналом и максимальным расходом гидравлического привода;
[0037] второе определяющее устройство для определения входного сигнала напряжения клапана управления расходом, соединенного с гидравлическим приводом в соответствии с сигналом запроса на расход и функцией компенсации расхода, где функция компенсации расхода является обратной функцией функции характеристической кривой расхода клапана управления расходом; и
[0038] блок управления для управления клапаном управления расходом так, чтобы он действовал в соответствии с входным сигналом напряжения.
[0039] Согласно другому аспекту настоящего изобретения предлагается устройство управления колебаниями стрелы, содержащее:
[0040] запоминающее устройство, и
[0041] процессор, соединенный с запоминающим устройством, при этом процессор выполнен с возможностью выполнять способ управления колебаниями стрелы, описанный в любом из вышеприведенных решений, на основе команд, хранящихся в запоминающем устройстве.
[0042] Согласно еще одному аспекту настоящего изобретения предлагается машиночитаемый носитель информации, на котором хранится компьютерная программа, которая при выполнении процессором, реализует способ управления колебаниями стрелы, описанный в вышеприведенных технических решениях.
[0043] Согласно еще одному аспекту настоящего изобретения предлагается инженерная машина, содержащая стрелу и устройство управления колебаниями стрелы согласно вышеописанному техническому решению.
[0044] В некоторых вариантах инженерная машина содержит пожарную машину с выдвижной лестницей или кран с стреловой кран.
[0045] Друге признаки и преимущества настоящего изобретения будут понятны из нижеследующего подробного описания иллюстративных вариантов изобретения со ссылками на приложенные чертежи.
Краткое описание чертежей
[0046] Приложенные чертежи, включенные в настоящее описание и образующие его часть, иллюстрируют варианты настоящего изобретения и, вместе с описанием, служат для пояснения принципов настоящего изобретения.
[0047] Настоящее изобретение будет более понятно из нижеследующего подробного описания со ссылками на приложенные чертежи, где:
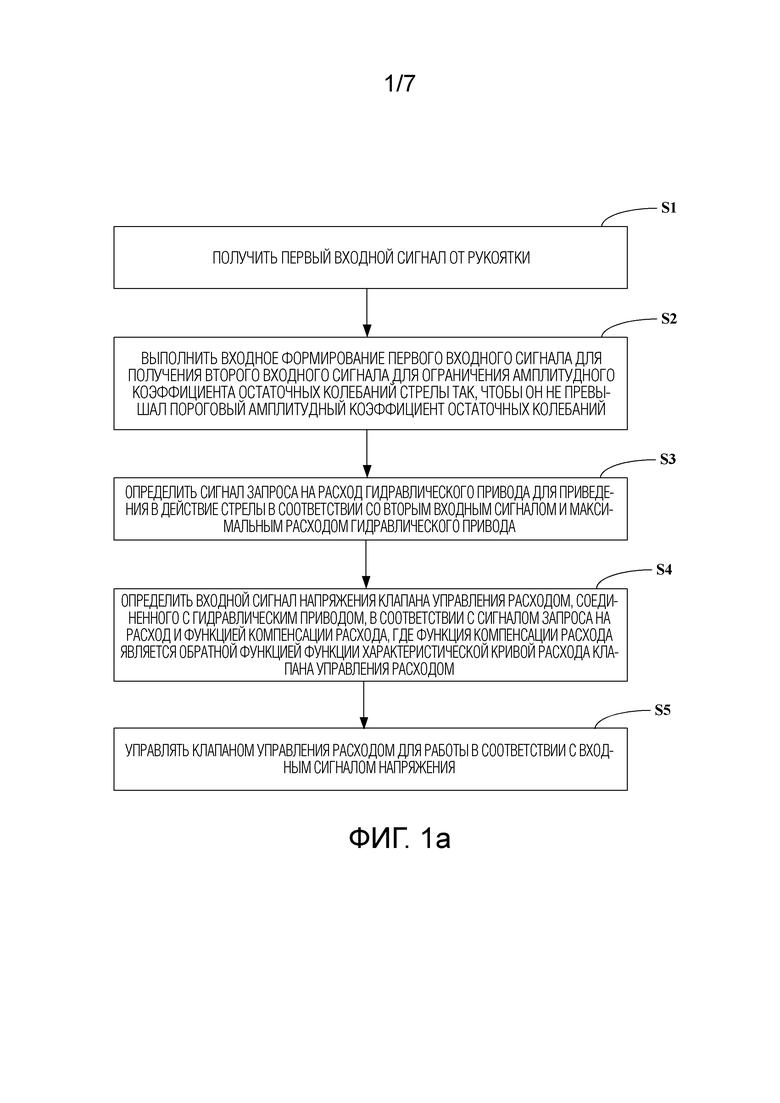
[0048] Фиг. 1a - диаграмма последовательности способа управления колебаниями стрелы в некоторых вариантах настоящего изобретения.
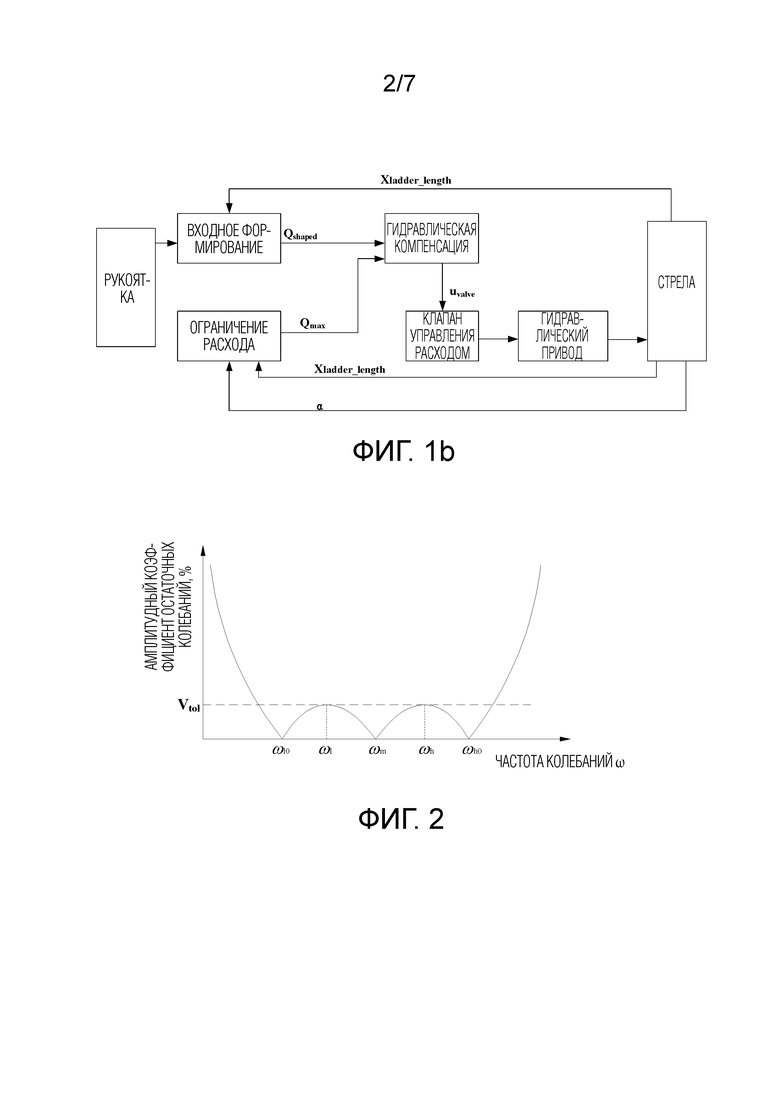
[0049] Фиг. 1b - схематическая диаграмма принципа управления колебаниями стрелы по некоторым варрантам настоящего изобретения.
[0050] Фиг. 2 - схематическая диаграмма кривой чувствительности входного формирователя заданной нечувствительности в некоторых вариантах настоящего изобретения.
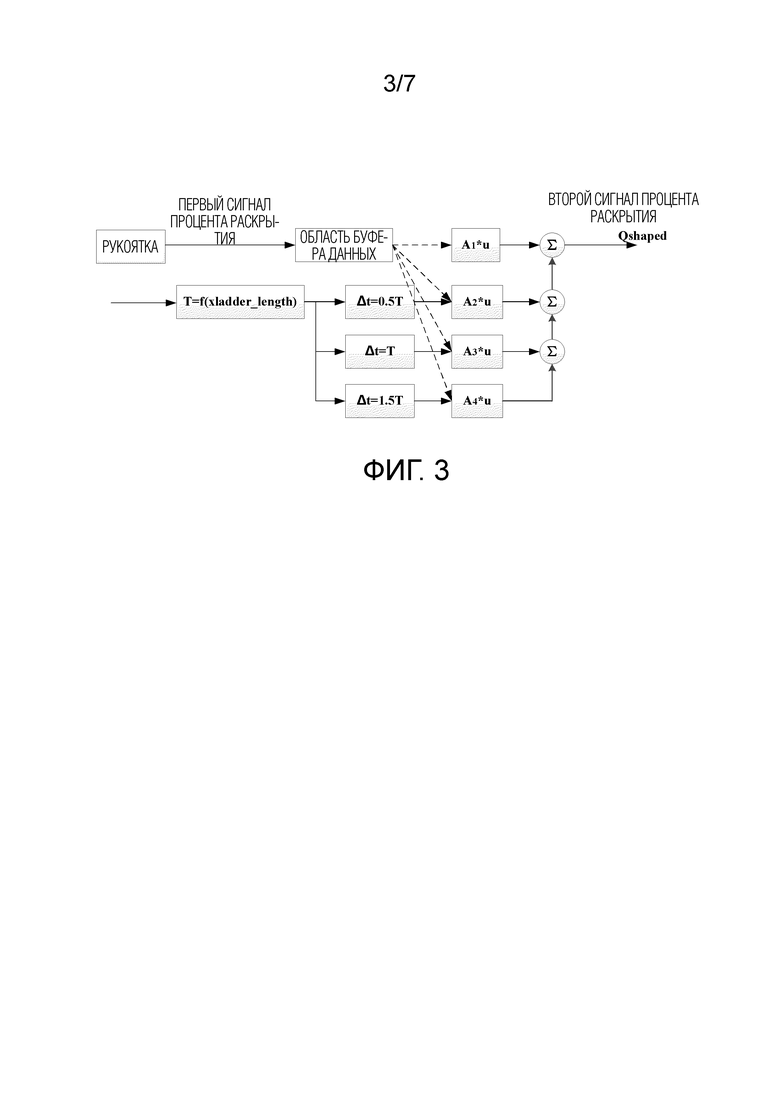
[0051] Фиг. 3 - схематическая диаграмма принципа выполнения входного формирования первого входного сигнала в некоторых вариантах настоящего изобретения.
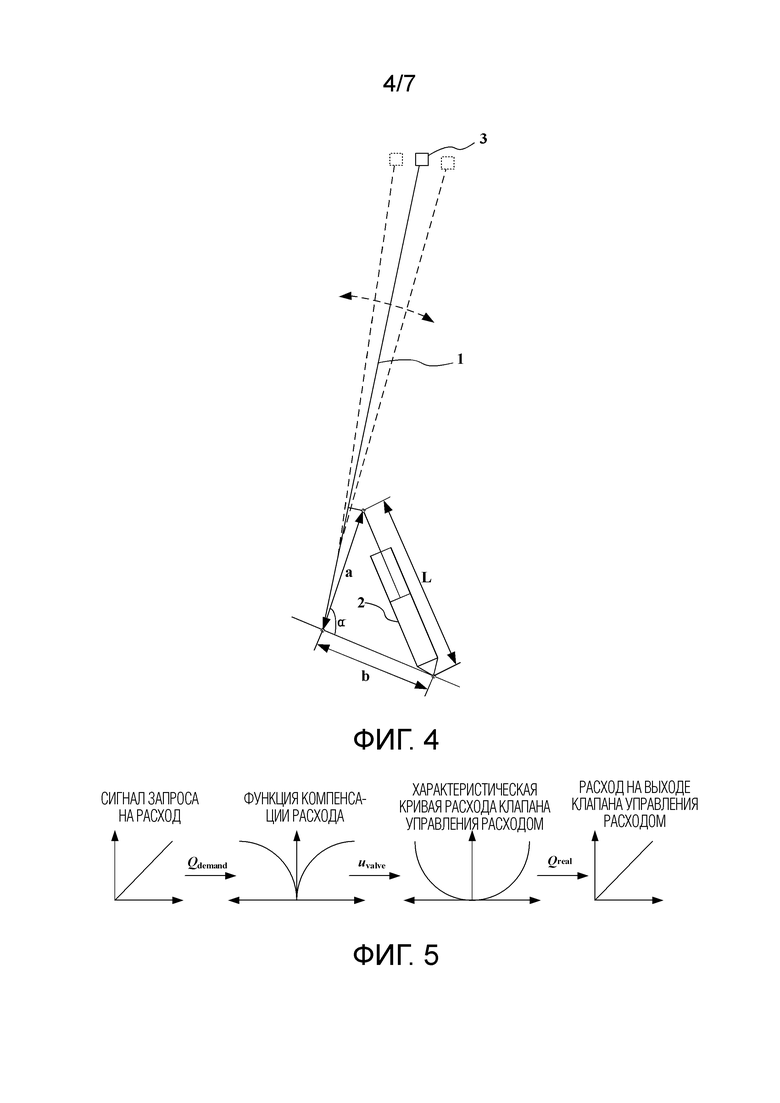
[0052] Фиг. 4 - схематическая диаграмма колебаний. Возникающих при подъеме стрелы.
[0053] Фиг. 5 - схематическая диаграмма принципа компенсации расхода для клапана управления расходом в некоторых вариантах настоящего изобретения.
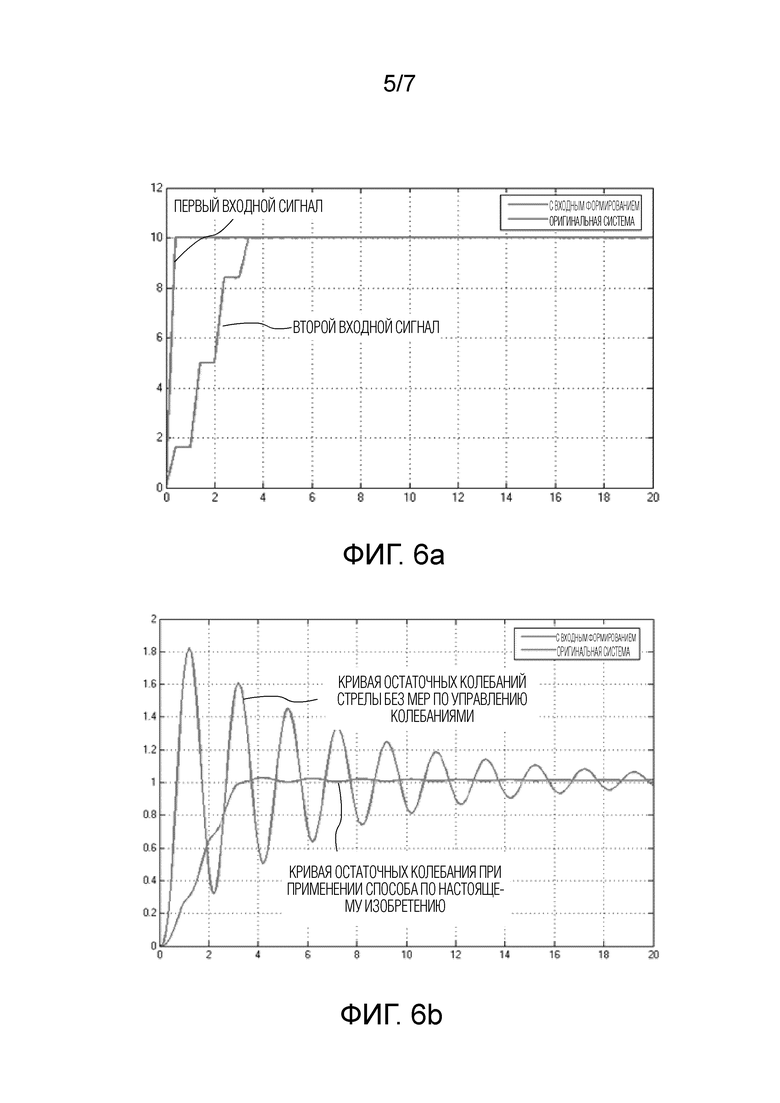
[0054] Фиг. 6a - диаграмма сравнения первого входного сигнала и второго входного сигнала в некоторых вариантах настоящего изобретения.
[0055] Фиг. 6b - диаграмма сравнения кривой остаточных колебаний стрелы без принятия мер по управлению колебаниями и кривой остаточных колебаний стрелы при принятии мер по управлению колебаниями по варианту настоящего изобретения.
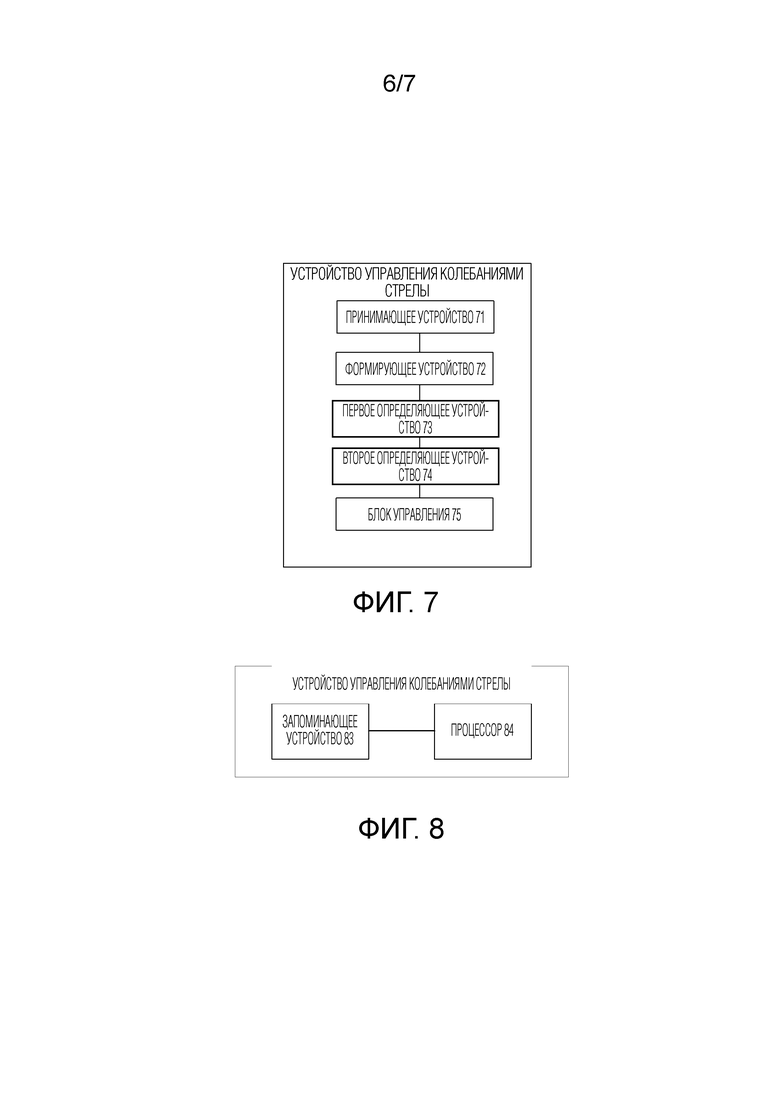
[0056] Фиг. 7 - блок-схема устройства управления колебаниями стрелы по некоторым вариантам настоящего изобретения.
[0057] Фиг. 8 - блок-схема устройства управления колебаниями стрелы по другим вариантам настоящего изобретения.
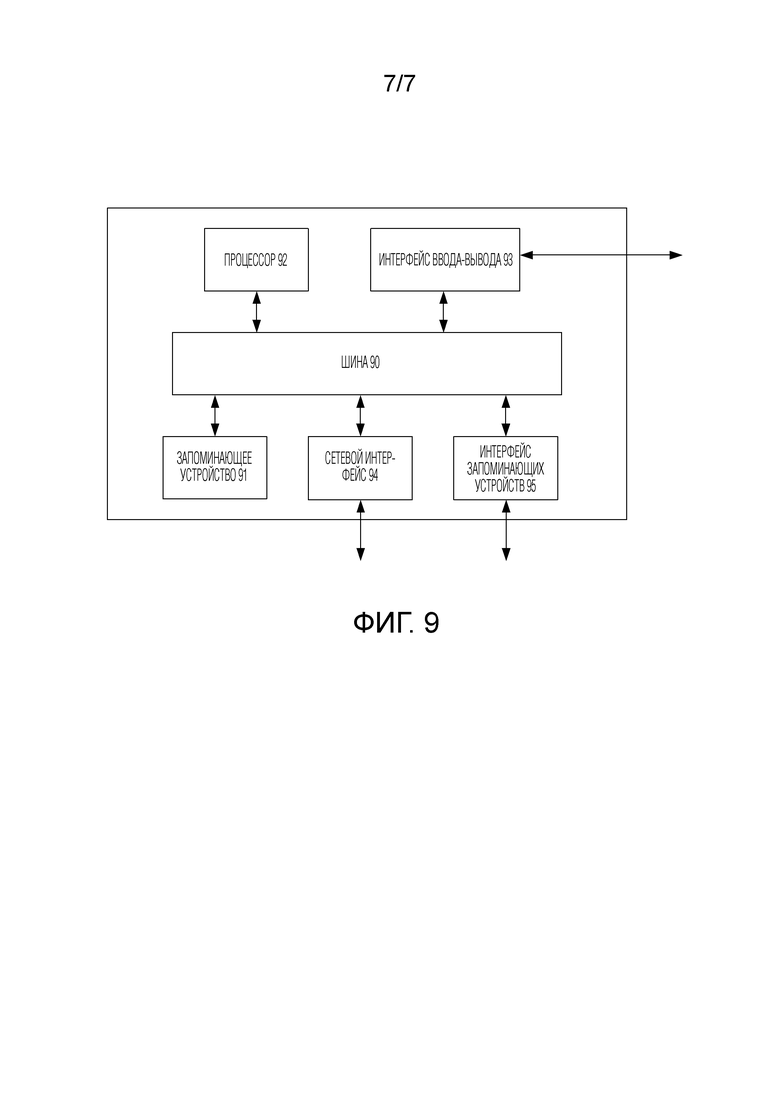
[0058] Фиг. 9 - блок-схема компьютерной системы по некоторым вариантам настоящего изобретения.
[0059] Следует понимать, что размеры различных деталей, показанных на чертежах, показаны не в реальном масштабе. Кроме того, для обозначения одинаковых или подобных компонентов используются одинаковые или подобные позиции.
Подробное описание
[0060] Далее следует подробное описание различных иллюстративных вариантов настоящего изобретения со ссылками на приложенные чертежи. Нижеприведенное описание вариантов является просто иллюстративным и не ограничивает настоящее изобретение, его применение и использование. Настоящее изобретение может быть реализовано в разных формах, не ограниченных описанными вариантами. Эти варианты приведены для полноты и тщательности описания и для доведения до специалистов полного объема изобретения. Следует отметить, что, если особо не оговорено иное, относительное расположение компонентов и этапов, состав материала числовые выражения и числовые величины, показанные в этих вариантах, следует толковать как чисто иллюстративные, а не как ограничивающие.
[0061] Если отсутствует иное определение, все термины (включая технические и научные), используемые в настоящем описании, имеют значение, обычно понимаемое специалистами в той области, к которой относятся иллюстративные варианты в соответствии с принципами изобретательской концепции. Также следует понимать, что термины, определенные в словарях общего назначения, следует толковать как имеющие значение, совместимое с их значением в контексте соответствующей отрасли знаний, и их не следует толковать в идеализированном или чрезмерно формальном смысле, если в тексте явно не указано иное.
[0062] Для пожарной машины с выдвижной лестницей, известной изобретателю, принцип управления колебаниями стрелы заключается в следующем: после получения от рукоятки сигнала на изменение раскрытия, контроллер машины тормозит движение стрелы для уменьшения ускорения движения стрелы, тем самым уменьшая колебания, вызванные изменением скорости стрелы. Такой способ управления колебаниями дает лучший эффект только когда скорость движения стрелы мала или стрела имеет небольшую длину. При высокой скорости движения стрелы или при длинной стреле для достижения идеального эффекта управления колебаниями, скорость стрелы следует менять очень медленно, то есть ускорением стрелы управляют так, чтобы оно было достаточно низким. Такой способ управления требует много времени на управление колебаниями и стрела все же совершает относительно большие движения на раннем этапе после того, как рукоятка будет отпущена. Поэтому, точность позиционирования стрелы, управляемой рукояткой, невелика, что влияет на эффективность спасательных операций.
[0064] Для другой пожарной машины с выдвижной лестницей, известной изобретателю, примером является восприятие колебаний, вызванных остановкой изменения вылета стрелы, и принцип управления колебаниями стрелы таков: когда стрела совершает колебания, изменение давления в цилиндре изменения вылета определяется датчиком давления масла, установленным на впуске масла этого цилиндра, или изменение смещения на дистальном конце стрелы определяется гироскопом, установленным на дистальном конце стрелы; контроллер машины выводит сигнал управления колебаниями для цилиндра изменения вылета в соответствии с сигналом датчика давления масла или сигналом гироскопа, так, что цилиндр изменения вылета генерирует колебания, противоположные направлению колебаний стрелы, чтобы достичь цели устранения колебаний стрелы.
[0065] Способ управления колебаниями в такой пожарной машине с выдвижной лестницей имеет следующие недостатки: необходимо определить период колебаний стрелы в соответствии с принятым сигналом датчика давления масла или гироскопа, чтобы к цилиндру изменения вылета можно было приложить силу управления колебаниями. Однако, для определения периода колебаний стрелы требуется по меньшей мере четверть периода сигнала, поэтому такой способ управления колебаниями не оказывает блокирующего воздействия на первое колебание с наибольшей амплитудой и наибольшим ущербом. Кроме того, трение между штоком поршня и корпусом цилиндра изменения вылета оказывает некоторое влияние на давление в цилиндре изменения вылета, и передача сигнала между гироскопом на дистальном конце стрелы и контроллером также создает определенную задержку. Эти фактор делают систему неспособной своевременно прилагать силу, управляющую колебаниями, к цилиндру изменения вылета, поэтому точность управления колебаниями невысока и эффект управления колебаниями далек от идеала. Кроме того, установка аппаратных средств, таких как датчик давления масла или гироскоп, также повышает стоимость и сложность системы и может влиять на стабильность системы.
[0066] Для решения вышеописанной технической задачи, в вариантах настоящего изобретения предлагается способ и устройство для управления колебаниями, инженерная машина и машиночитаемый носитель информации.
[0067] В некоторых вариантах настоящего изобретения предлагается способ управления колебаниями стрелы, который применяется для запрета в определенной степени остаточных колебаний, вызванных гибкостью ее собственной структуры, когда стрела инженерной машины балочного типа выполняет такие действия, как изменение вылета или поворот. Конкретный тип инженерной машины балочного типа не ограничен, например, это может быть пожарная машина с выдвижной лестницей или стреловой кран. В вариантах настоящего изобретения, для инженерной машины балочного типа, дистальный конец стрелы означает конец, наиболее удаленный от кабины оператора и, соответственно, проксимальный конец относится к концу, расположенному ближе к кабине оператор инженерной машины.
[0068] Как показано на фиг. 1a, способ управления колебаниями содержит этапы с S1 по S5.
[0069] На этапе S1 получают первый входной сигнал от рукоятки.
[0070] Оператор управляет работой стрелы, манипулируя рукояткой, например, заставляя стрелу подниматься/опускаться или поворачиваться. В некоторых вариантах настоящего изобретения первый входной сигнал является первым сигналом процента раскрытия, и этап S1 содержит этапы, а которых:
[0071] получают от рукоятки сигнал изменения раскрытия; и
[0072] получают первый сигнал процента раскрытия, поступающий от рукоятки в соответствии с сигналом изменения раскрытия, поступающим от рукоятки. При этом сигнал изменения раскрытия, поступающий от рукоятки, является, например, сигналом изменения угла раскрытия, поступающим от рукоятки.
[0073] В других вариантах настоящего изобретения этап S1 далее содержит этап, на котором: буферируют первый сигнал процента раскрытия, поступающий от рукоятки. Например, первый сигнал процента раскрытия записывают в область буфера данных в контроллере во временной последовательности. Буферированный первый сигнал процента раскрытия подергают входному формированию на последующем этапе.
[0074] Возвращаясь к фиг. 1a, на этапе S2 выполняют входное формирование первого входного сигнала для получения второго входного сигала, при этом второй входной сигал используют для ограничения амплитудного коэффициента остаточных колебаний стрелы, чтобы он не превышал пороговой величины амплитудного коэффициента остаточных колебаний.
[0075] В некоторых вариантах настоящего изобретения первый входной сигнал является первым сигналом процента раскрытия, второй входной сигнал является вторым сигналом процента раскрытия, и этап S2 содержит этапы, на которых: свертывают первый сигнал процента открытия последовательностью импульсов входного формирователя заданной нечувствительности для получения второго сигнала процента раскрытия, при этом амплитуда и задержка последовательности импульсов входного формирователя заданной нечувствительности определяют в соответствии с кривой чувствительности входного формирователя заданной нечувствительности и функцией амплитудного коэффициента остаточных колебаний стрелы.
[0076] Кривая чувствительности входного формирователя заданной нечувствительности показана на фиг. 2, где горизонтальная ось представляет частоту колебаний, обозначенную ω; вертикальная ось представляет амплитудный коэффициент остаточных колебаний, то есть отношение амплитуды колебаний после торможения колебаний к амплитуде стрелы, когда меры по управления колебаниями не принимаются, и выражается в процентах. Как можно видеть на чертеже, когда частота колебаний не меньше и не больше , входной формирователь заданной нечувствительности может ограничивать амплитудный коэффициент остаточных колебаний ниже порогового амплитудного коэффициента остаточных колебаний. Выбор входного формирователя заданной нечувствительности имеет высокую устойчивость к ошибкам во входной частоте колебаний стрелы, поэтому устойчивость управления колебаниями стрелы можно повысить, при этом устойчивость относится к характеристике системы управления, способной поддерживать некоторые другие эксплуатационные характеристики в условиях пертурбаций некоторого параметра.
[0077] Остаточные колебания стрелы в результате сери импульсных возбуждений без мер по управлению колебаниями упрощаются д колебательной системы второго порядка, и функцию амплитудного коэффициента остаточных колебаний можно выразить как:
[0078] В этом уравнении
[0079] где ω - частота колебаний стрелы, ξ - коэффициент демпфирования стрелы, V(ω,ξ) - функция величины остаточных колебаний стрелы, Ai - амплитуда последовательности импульсов, ti - задержка последовательности импульсов, n - количество импульсов, и ωd= .
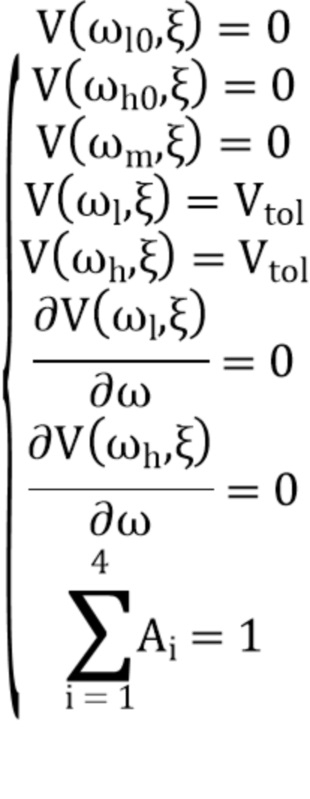
[0080] Согласно вышеприведенной функции амплитудного коэффициента остаточных колебаний и кривой чувствительности входного формирователя заданной нечувствительности, уравнения ограничений последовательности импульсов входного формирователя заданной нечувствительности можно получить следующим образом:
[0081] где ω - частота колебаний стрелы, ξ - коэффициент демпфирования колебаний стрелы, Vtol - пороговый амплитудный коэффициент остаточных колебаний стрелы, и Ai - амплитуда последовательности импульсов входного формирователя заданной нечувствительности, , , , и - базовая применимая частота, максимальная применимая частота, частота, соответствующая первой амплитуде и частота, соответствующая второй амплитуде входного формирователя заданной нечувствительности, соответственно.
[0082] В некоторых вариантах, при условии, что коэффициент демпфирования стрелы равен ξ=0, вышеприведенные уравнения ограничений решаются для получения для входного формирователя заданной нечувствительности следующим образом:
[0083] где Vtol - пороговый амплитудный коэффициент остаточных колебаний стрелы, Ai - амплитуда последовательности импульсов входного формирователя заданной нечувствительности, ti - задержка последовательности импульсов входного формирователя заданной нечувствительности, и T - период колебаний стрелы.
[0084] Период колебаний стрелы - это внутреннее свойство, связанное с длиной стрелы, и является разным для балок разной длины. В некоторых вариантах настоящего изобретения способ управления колебаниями стрелы дополнительно содержит этап, на котором: перед этапом S2 определяют период колебаний стрелы в соответствии с длиной стрелы и соответствующим отношением между длиной стрелы и периодом колебаний стрелы. Соответствующее отношение между длиной стрелы и периодом колебаний стрелы можно ввести в запоминающее устройство контроллера заранее. Соответствующее отношение между длиной стрелы и периодом колебаний стрелы можно получить методом модального моделирования.
[0085] В других вариантах настоящего изобретения соответствующее отношение между длиной стрелы и периодом колебаний также можно вычислить аналитически, с помощью теоретической модели. В других вариантах настоящего изобретения на дистальном конце стрелы установлен датчик движения или на масляном входе цилиндра изменения вылета установлен датчик давления масла. Стрела искусственно возбуждают для совершения колебаний для получения сигнала колебаний стрелы во временной области от этого датчика. Затем сигнал колебаний во временной области подвергают анализу и преобразованию Фурье для получения сигнала колебаний в частотной области. Максимальную частоту берут как период колебаний стрелы при текущей длине, и затем, получают соответствующее отношение между длиной стрелы и периодом колебаний стрелы в соответствии с величинами периода колебаний стрелы при разных длинах.
[0086] Для упрощения расчетов и повышения эффективности расчетов в вышеприведенных вариантах настоящего изобретения колебания стрелы упрощают до системы недемпфированных колебаний второго порядка. В некоторых других вариантах настоящего изобретения также можно получать информацию о затухании колебаний стрелы, когда не принимаются меры по управлению колебаниями. Коэффициент ξ демпфирования колебаний стрелы можно определить по информации о затухании амплитуды и, затем, вставить в вышеприведенные уравнения ограничений входного формирователя заданной нечувствительности для получения скорректированного решения уравнений.
[0087] Решение входного формирователя заданной нечувствительности содержит четыре импульса, соответствующие амплитудам с А1 по А4, соответственно, а интервал между соседними импульсами составляет 0,5 от периода колебаний стрелы (0,5Т) Как показано на фиг. 3, после получения решения входного формирователя заданной нечувствительности, первый сигнал процента раскрытия свертывают последовательностью импульсов входного формирователя заданной нечувствительности для получения второго сигнала процента раскрытия. То есть, первый сигнал u процента раскрытия поочередно умножают на амплитуды четырех импульсов (А1-А4) в соответствии с задержкой в 0,5 периода колебаний стрелы (0,5Т), а затем суммируют для получения второго сигнала Qshaped процента раскрытия, где T=f(xladder_length) - функция соответствия между длиной xladder_length стрелы и периодом Е колебаний стрелы.
[0088] В некоторых вариантах настоящего изобретения первый сигнал процента раскрытия вводят в область буфера данных контроллера. Данные сигнала, по меньшей мере в 1,5 раза больше периода колебаний стрелы (1,5Т) можно ввести в область буфера данных для свертывания последовательностью импульсов входного формирователя заданной нечувствительности.
[0089] Примечательно, что в вариантах настоящего изобретения формирователь не ограничен входным формирователем заданной нечувствительности, и могут применяться другие входные формирователи, пригодные для достижения баланса между устойчивостью и требованиями к реакции.
[0090] Возвращаясь к фиг. 1a, на этапе S3 определяют сигнал запроса расхода гидравлического привода в соответствии со вторым входным сигналом и максимальным расходом гидравлического привода для приведения в действие стрелы.
[0091] Как показано на фиг. 4, если взять для примера пожарную машину с выдвижной лестницей, если скорость движения рабочей корзины на дистальном конце стрелы 1 во время движения стрелы 1 слишком велика, возникают угрозы для безопасности и дискомфорт для спасателей в рабочей корзине 3. Поэтому, необходимо ограничить расход гидравлического привода (такого как цилиндр 2 изменения вылета), который приводит в действие стрелу 1, для ограничения скорости движения рабочей корзины 3 в допустимом диапазоне. В некоторых вариантах настоящего изобретения второй входной сигнал является вторым сигналом процента раскрытия, и на вышеописанном этапе S3, например, определяют сигнал Qdemand(t) в соответствии с произведением второго сигнала Qshaped(t) и максимального расхода Qmax гидравлического привода.
[0092] В некоторых вариантах настоящего изобретения первый входной сигнал от рукоятки используется для управления изменение вылета стрелы. Гидравлическим приводом является цилиндр изменения вылета, и максимальный расход Qmax гидравлического привода является максимальным расходом цилиндра изменения вылета.
[0093] Формула расхода цилиндра изменения вылета такова:
[0094] где Q - расход цилиндра изменения вылета, А - площадь воздействия масла в цилиндре изменения вылета, а dL/dt - производная длины цилиндра изменения вылета относительно времени.
[0095] Максимальный расход Qmax можно получить из максимальной величины расхода Q на цилиндре изменения вылета. Обращаясь к геометрическому отношению, показанному на фиг. 4, расход Q на цилиндре 2 изменения вылета можно рассчитать в соответствии со следующим выражением отношения:

[0096] где a - расстояние от шарнирной точки на одном конце цилиндра изменения вылета до шарнирной точки на проксимальном конце стрелы, b - расстояние от шарнирной точки на другом конце цилиндра изменения вылета до шарнирной точки на проксимальном конце стрелы, α - угол между линией, соединяющей шарнирную точку на проксимальном конце стрелы и шарнирную точку одном конце цилиндра изменения вылета, и линией, соединяющей шарнирную точку на проксимальном конце стрелы и шарнирную точку на другом конце цилиндра изменения вылета, vmax_cage - максимально допустимая линейная скорость дистального конца стрелы, и xladder_length - длина стрелы.
[0097] В некоторых вариантах настоящего изобретения первый входной сигнал также может использоваться для управления поворотом стрелы, а гидравлическим приводом является поворотный гидромотор. Когда в качестве гидравлического привода используется поворотный гидромотор, максимальный расход Qmax, описанный выше, является фиксированной величиной.
[0098] Поскольку расход гидравлического привода ограничен определенным диапазоном, скорость движения рабочей корзины ограничена определенным диапазоном, что обеспечивает безопасность спасателей и снижает дискомфорт, вызванный работой стрелы.
[0099] Возвращаясь к фиг. 1a, на этапе S4 определяется входной сигнал напряжения клапана управления расходом, соединенного с гидравлическим приводом, в соответствии с сигналом запроса на расход и функцией компенсации расхода, при этом функция компенсации расхода является обратной функцией функции характеристической кривой расхода клапана управления расходом.
[0100] Работой гидравлического привода управляет клапан управления расходом. Клапан управления расходом является, например, гидравлическим клапаном. Поскольку характеристическая кривая расхода клапана управления расходом нелинейна, для выполнения линейного преобразования между сигналом Qdemand запроса расхода и выходным расходом Qreal клапана управления расходом, тем самым уменьшая или даже предотвращая сдвиг амплитуды сигнала расхода, выводимого клапаном управления расходом, чтобы достичь лучшего эффекта управления колебаниями, в некоторых вариантах настоящего изобретения выполняют расчет компенсации сигнала расхода, выводимого клапаном управления расходом. Как показано на фиг. 5, в некоторых вариантах настоящего изобретения входной сигнал uvalve напряжения клапана управления расходом, соединенного с гидравлическим приводом, определяется в соответствии с сигналом Qdemand запроса расхода и функцией u=f-1(Q) клапана управления расходом. То есть, сигнал Qdemand запроса расхода заменяется на функцию u=f-1(Q) компенсации расхода для получения входного сигнала uvalve напряжения, где функция u=f-1(Q) компенсации расхода является обратной функцией функции Q=f(u) характеристической кривой расхода клапана управления расходом.
[0101] Возвращаясь к фиг. 1a, на этапе S5 клапаном управления расходом управляют так, чтобы он действовал в соответствии с входным сигналом uvalve напряжения. Принцип управления колебаниями стрелы по этому варианту показан на фиг. 1b
[0102] Как показано на фиг. 6a и 6b, фиг. 6a - это сравнительная диаграмма первого входного сигнала и второго входного сигнала в некоторых вариантах настоящего изобретения, а фиг. 6b - это диаграмма сравнения кривой остаточных колебаний стрелы без принятия мер по управлению колебаниями и кривой остаточных колебаний стрелы при применении способа управления колебаниями по варианту настоящего изобретения. На чертежах показано, что после применения способа управления колебаниями по варианту настоящего изобретения, амплитуда остаточных колебаний стрелы неочевидна, поэтому колебания стрелы не чувствуются.
[0103] Входной формирователь заданной нечувствительности, используемый в варианте настоящего изобретения, содержит четыре импульса, где временная задержка последнего импульса составляет 1,5Т, что значительно меньше, чем время затухания, требующееся для остаточного колебания стрелы без принятия мер по управлению колебаниями. Следовательно, своевременность управления колебаниями улучшается. Кроме того, на чертеже также можно видеть, что даже если скорость изменения первого входного сигнала близка к скорости ступенчатого сигнала, все еще может быть достигнут улучшенный эффект управления колебаниями.
[0104] Способ управления колебаниями стрелы по варианту настоящего изобретения относится к способу активного управления колебаниями стрелы. За счет входного формирования первого входного сигнала для получения второго входного сигнала и управляя работой стрелы, используя второй входной сигнал, амплитудный коэффициент остаточных колебаний стрелы можно ограничить так, чтобы он не превышал порогового амплитудного коэффициента остаточных колебаний. По сравнению с решениями, известными изобретателю, решение по вариантам настоящего изобретения может обеспечить более своевременное и точное управление колебаниями.
[0105] В некоторых вариантах настоящего изобретения используется входной формирователь заданной нечувствительности, которых обладает хорошей устойчивостью к ошибкам во входной частоте колебаний стрелы и, поэтому, может улучшить устойчивость управления колебаниями. Входной формирователь заданной нечувствительности может выполнять входное формирование первого входного сигнала из первого импульса и управлять колебаниями стрелы до того, как они достигнут первой амплитуды колебаний. Поэтому, это оказывает больший тормозящий эффект на первую амплитуду самого сильного колебания стрелы.
[0106] Кроме того, по сравнению с решениями, известными изобретателю, в решении по вариантам настоящего изобретения вышеописанные положительные эффекты могут достигаться без дополнительных аппаратных средств, таких как датчики. Таким образом, физическая структура оригинальной системы и ее рабочая стабильность не ухудшаются и стоимость аппаратных средств не возрастает.
[0107] Как показано на фиг. 7, в некоторых вариантах настоящего изобретения предлагается устройство управления колебаниями стрелы, содержащее:
[0108] приемное устройство 71 для получения первого входного сигнала от рукоятки;
[0109] формирующее устройство 72 для входного формирования первого входного сигнала для получения второго входного сигнала для ограничения амплитудного коэффициента остаточных колебаний стрелы, чтобы он не превышал порогового амплитудного коэффициента остаточных колебаний;
[0110] первое определяющее устройство 73 для определения сигнала запроса расхода гидравлического привода для приведения в действие стрелы в соответствии со вторым входным сигналом и максимальным расходом гидравлического привода;
[0111] второе определяющее устройство 74 для определения входного сигнала напряжения клапана управления расходом, соединенного с гидравлическим приводом в соответствии с первым входным сигналом и функции компенсации расхода, где функция компенсации расхода является обратной функцией от функции характеристической кривой расхода клапана управления расходом; и
[0112] блок 75 управления для управления клапаном управления расходом для работы в соответствии со входным сигналом напряжения.
[0113] Аналогично, с помощью устройства управления колебаниями стрелы по варианту настоящего изобретения достигаются положительные эффекты, подобные тем, которые описаны выше и их подробное описание опускается.
[0114] Как показано на фиг. 8, в некоторых вариантах настоящего изобретения далее предлагается устройство управления колебаниями стрелы, содержащее: запоминающее устройство 83 и процессор 84, соединенный с запоминающим устройством 83, при этом процессор 84 выполнен с возможностью выполнять способ управления колебаниями стрелы, описанный выше для любого из вариантов, на основе команд, хранящихся в запоминающем устройстве 83.
[0115] Следует понимать, что каждый этап способа управления колебаниями стрелы может быть реализован процессором с помощью программных средств, аппаратных средств, аппаратно-программных средств или их комбинаций.
[0116] В дополнение к способу управления колебаниями стрелы и устройству, описанным выше, варианты настоящего изобретения также могут принимать форму компьютерного программного продукта, реализованного на одном или более энергонезависимых носителях информации, содержащий команды компьютерной программы. Таким образом, в некоторых вариантах настоящего изобретения далее предлагается машиночитаемый носитель информации, на котором хранится компьютерная программа, которая при выполнении процессором реализует способ управления колебаниями стрелы, описанный в любом из вышеприведенных технических решений.
[0117] На фиг. 9 показана структурная схема компьютерной системы по некоторым вариантам настоящего изобретения. Как показано на фиг. 9, компьютерная система может иметь форму вычислительного устройства общего назначения, и компьютерная система может использоваться для реализации способа управления колебаниями стрелы по вышеописанным вариантам. Компьютерная система содержит запоминающее устройство 91, процессор 92 и шину 90, соединяющую разные компоненты системы.
[0118] Запоминающее устройство 91 может содержать системную память, энергонезависимое запоминающее устройство и т.п. В системной памяти хранится, например, операционная система, прикладные программы, программа начальной загрузки и другие программы. Системная память может содержать кратковременный носитель памяти, например, ОЗУ, и/или кэш-память. Энергонезависимое запоминающее устройство хранит, например команды для выполнения соответствующего варианта способа управления колебаниями стрелы, описанного выше. Энергонезависимое запоминающее устройство содержит запоминающее устройство на магнитном диске, запоминающее устройство на оптическом диске, флэш-память и т.п.
[0119] Процессор 92 может быть выполнен из дискретных компонентов, таких как процессор общего назначения, цифровой процессор сигнала, специализированная интегральная схема, программируемая логическая интегральная схема или другие логические устройства, дискретные вентили или транзисторы. Соответственно, каждое устройство, такое как устройство принятия решений или устройство определения, может быть реализовано в центральном процессоре, выполняющем команды, выполняя соответствующие этапы, или может быть реализовано специализированной схемой, которая выполняет соответствующие этапы.
[0120] Шина 90 может иметь любую из множества структур шины. Например, этим структурам, помимо прочего, относятся: шина со стандартной промышленной архитектурой (ISA), шина с микроканальной архитектурой (MAC) и шина взаимного соединения периферийных компонентов (PCI).
[0121] Компьютерная система далее может содержать интерфейс 93 ввода-вывода, сетевой интерфейс 94, интерфейс памяти 95 и т.п. Эти интерфейсы 93,94, 95, запоминающее устройство 91 и процессор 92 могут соединяться через шину 90. Интерфейс 93 ввода-вывода может обеспечивать соединение с устройствами ввода-вывода, такими как дисплей, мышь и клавиатура. Сетевой интерфейс 94 может обеспечивать соединение с различными устройствами, соединенными в сеть. Интерфейс памяти обеспечивает соединение для внешних запоминающих устройств, таких как накопители на гибких магнитных дисках, диски флэш-памяти или карты памяти SD.
[0122] В некоторых вариантах настоящего изобретения далее предлагается инженерная машина, содержащая: стрелу и устройство управления колебаниями стрелы по вышеописанным вариантам. Инженерная машина является, помимо прочего: пожарной машиной с выдвижной лестницей или стреловым краном. Когда оператор приводит в действие стрелу инженерной машины стрелового типа, возникает улучшенный эффект управления колебаниями стрелы.
[0123] Выше были подробно описаны различные варианты настоящего изобретения. Чтобы не усложнять восприятие концепции настоящего изобретения, описание некоторых известных деталей опущено. На основе вышеприведенного описания специалистам должно быть понятно, как реализовать описанные технические решения.
[0124] Хотя выше были подобно описаны некоторые конкретные варианты настоящего изобретения, приведенные для примера, специалистам должно быть понятно, что эти примеры приведены только в целях иллюстрации и не предназначены для ограничения объема настоящего изобретения. Специалистам должно быть понятно, что в эти варианты могут быть внесены изменения или эквивалентные замены части технических признаков без выхода за пределы за пределы объема и изобретательской идеи настоящего изобретения. Объем изобретения определяется приложенной формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЖАРНАЯ МАШИНА | 2021 |
|
RU2821611C1 |
| ДЕМПФЕР КОЛЕБАНИЙ С АКТИВНЫМ УПРАВЛЕНИЕМ, ДЕМПФИРУЮЩАЯ СИСТЕМА И ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2787736C1 |
| СИСТЕМЫ И СПОСОБЫ УСТРАНЕНИЯ ШУМОВ | 2019 |
|
RU2797926C1 |
| СИСТЕМЫ И СПОСОБЫ ШУМОПОДАВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ТЕХНОЛОГИИ СУБПОЛОСНОГО ШУМОПОДАВЛЕНИЯ | 2019 |
|
RU2792614C1 |
| СПОСОБ И УСТРОЙСТВО ПРОГНОЗИРОВАНИЯ ИЗОБРАЖЕНИЙ И СЧИТЫВАЕМЫЙ КОМПЬЮТЕРОМ НОСИТЕЛЬ ДАННЫХ | 2020 |
|
RU2810126C2 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА СВЯЗИ | 2018 |
|
RU2763019C2 |
| АКУСТИЧЕСКОЕ УСТРОЙСТВО | 2021 |
|
RU2805013C1 |
| ОГРАНИЧЕНИЕ СОПОСТАВЛЕНИЯ ДЛЯ ВИРТУАЛЬНОГО БУФЕРА ВНУТРИБЛОЧНОГО КОПИРОВАНИЯ | 2020 |
|
RU2818521C2 |
| ТРУБА ДЛЯ ОДНОРОДНОГО СМЕШИВАНИЯ ПЕНЫ, СИСТЕМА ПЕНОСМЕШИВАНИЯ ДЛЯ ПОЖАРОТУШЕНИЯ И СПОСОБ ЕЕ УПРАВЛЕНИЯ, А ТАКЖЕ ПОЖАРНАЯ МАШИНА | 2020 |
|
RU2798754C1 |
| ВИДЕОКОДЕР, ВИДЕОДЕКОДЕР И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2020 |
|
RU2819065C2 |
Изобретение относится к строительному оборудованию. В способе управления колебаниями стрелы получают первый входной сигнал от рукоятки и формируют первый входной сигнал для получения второго входного сигнала для ограничения амплитудного коэффициента остаточных колебаний стрелы так, чтобы он не превышал пороговый амплитудный коэффициент остаточных колебаний. Определяют сигнал запроса расхода гидравлического привода для приведения стрелы в действие в соответствии со вторым входным сигналом и максимальным расходом гидравлического привода. Определяют входной сигнал напряжения клапана управления расходом, соединенного с гидравлическим приводом в соответствии с сигналом запроса на расход и функцией компенсации расхода. Функция компенсации расхода является обратной функцией функции характеристической кривой расхода клапана управления расходом. Управляют клапаном управления расходом так, чтобы он работал в соответствии с входным сигналом напряжения. Реализуется возможность управления колебанием стрелы. 5 н. и 12 з.п. ф-лы, 9 ил.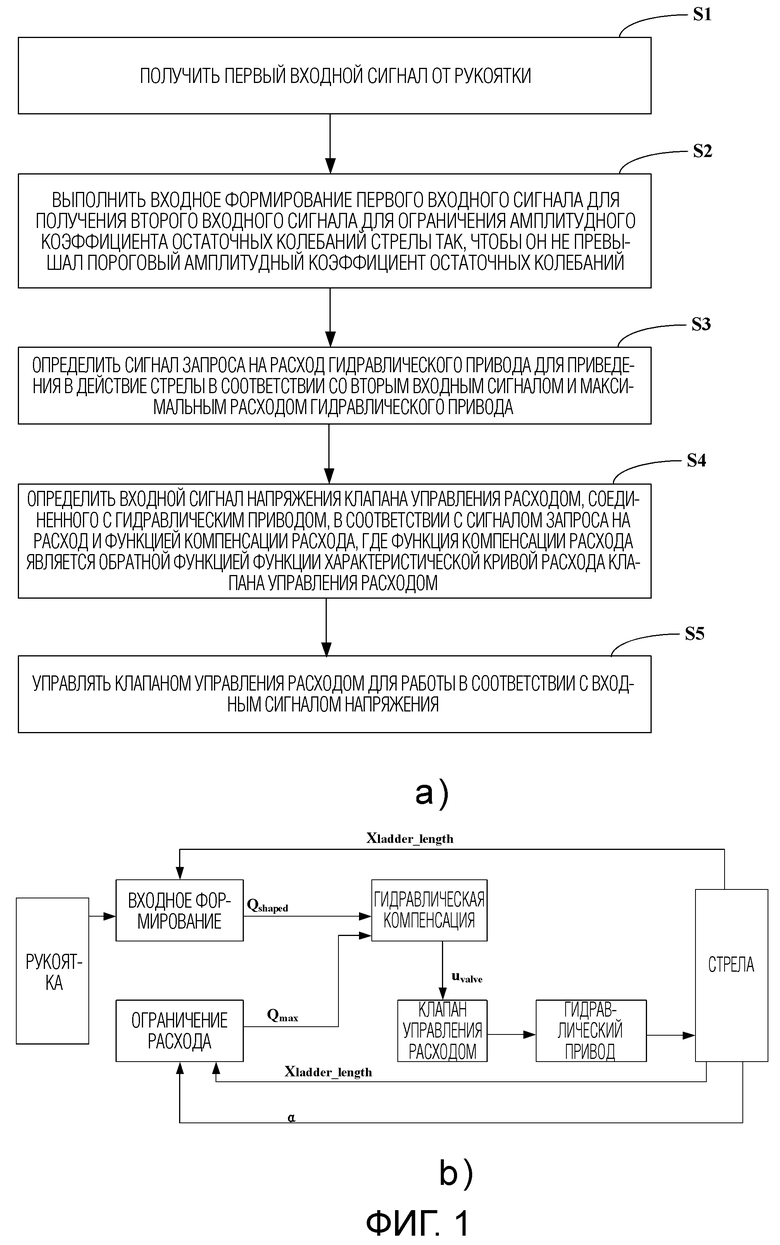
1. Способ управления колебаниями стрелы, содержащий этапы, на которых:
получают первый входной сигнал от рукоятки;
выполняют входное формирование первого входного сигнала для получения второго входного сигнала для ограничения амплитудного коэффициента остаточных колебаний стрелы так, чтобы он не превышал пороговый амплитудный коэффициент остаточных колебаний;
определяют сигнал запроса расхода гидравлического привода для приведения стрелы в действие в соответствии со вторым входным сигналом и максимальным расходом гидравлического привода;
определяют входной сигнал напряжения клапана управления расходом, соединенного с гидравлическим приводом в соответствии с сигналом запроса на расход и функцией компенсации расхода, при этом функция компенсации расхода является обратной функцией функции характеристической кривой расхода клапана управления расходом; и
управляют клапаном управления расходом так, чтобы он работал в соответствии с входным сигналом напряжения.
2. Способ по п. 1, при котором:
первый входной сигнал является первым сигналом процента раскрытия, а второй входной сигнал является вторым сигналом процента раскрытия; и
выполнение входного формирования первого входного сигнала для получения второго входного сигнала включает этапы, на которых:
свертывают первый сигнал процента раскрытия последовательностью импульсов входного формирователя заданной нечувствительности для получения второго сигнала процента раскрытия, при этом амплитуда и временная задержка последовательности импульсов входного формирователя заданной нечувствительности определяют в соответствии с кривой чувствительности входного формирователя заданной нечувствительности и функцией амплитудного коэффициента остаточных колебаний стрелы.
3. Способ по п. 2, при котором функция амплитудного коэффициента остаточных колебаний стрелы представляет собой:
 ,
,
в этом уравнении:
где ω - частота колебаний стрелы, ξ - коэффициент демпфирования стрелы, V(ω,ξ) - функция величины остаточных колебаний стрелы, Ai - амплитуда последовательности импульсов, ti - задержка последовательности импульсов, n - количество импульсов и ωd=  .
.
4. Способ по п. 3, при котором уравнения ограничений последовательности импульсов входного формирователя заданной нечувствительности представляют собой:
где ω - частота колебаний стрелы, ξ - коэффициент демпфирования колебаний стрелы, Vtol - пороговый амплитудный коэффициент остаточных колебаний стрелы и Ai - амплитуда последовательности импульсов входного формирователя заданной нечувствительности,  ,
,  ,
,  ,
,  и
и  - базовая применимая частота, максимальная применимая частота, частота, соответствующая первой амплитуде, и частота, соответствующая второй амплитуде входного формирователя заданной нечувствительности, соответственно.
- базовая применимая частота, максимальная применимая частота, частота, соответствующая первой амплитуде, и частота, соответствующая второй амплитуде входного формирователя заданной нечувствительности, соответственно.
5. Способ по п. 4, при котором коэффициент демпфирования колебаний стрелы равен ξ=0, а решение для входного формирователя заданной нечувствительности представляет собой:


где Vtol - пороговый амплитудный коэффициент остаточных колебаний стрелы, Ai - амплитуда последовательности импульсов входного формирователя заданной нечувствительности, ti - задержка последовательности импульсов входного формирователя заданной нечувствительности и T - период колебаний стрелы.
6. Способ по п. 5, дополнительно содержащий этап, на котором:
перед выполнением входного формирования первого входного сигнала определяют период колебаний стрелы в соответствии с длиной стрелы и соответствующее отношение между длиной стрелы и периодом колебаний стрелы.
7. Способ по п. 2, при котором этап получения первого входного сигнала содержит этап, на котором:
получают сигнал на изменение раскрытия от рукоятки; и
получают первый сигнал процента раскрытия в соответствии с сигналом на изменение раскрытия.
8. Способ по п. 2, в котором этап получения первого входного сигнала далее содержит этап, на котором:
буферируют первый сигнал процента раскрытия.
9. Способ по п. 2, в котором первый входной сигнал используют для управления вылетом стрелы, и гидравлическим приводом является цилиндр изменения вылета; и
в котором максимальный расход цилиндра вылета достигается в соответствии со следующим функциональным отношением:

где Q - расход на цилиндре изменения вылета, A - площадь воздействия масла в цилиндре изменения вылета, a - расстояние от шарнирной точки на одном конце цилиндра изменения вылета до шарнирной точки на проксимальном конце стрелы; b - расстояние от шарнирной точки на другом конце цилиндра изменения вылета до шарнирной точки на проксимальном конце стрелы, α - угол между линией, соединяющей шарнирную точку на проксимальном конце стрелы и шарнирную точку на одном конце цилиндра изменения вылета, и линией, соединяющей шарнирную точку на проксимальном конце стрелы и шарнирную точку на другом конце цилиндра изменения вылета, Vmax_cage - максимально допустимая линейная скорость дистального конца стрелы и xladder_length - длина стрелы.
10. Способ по п. 2, в котором первый входной сигнал используют для управления поворотом стрелы и гидравлическим приводом является вращающийся гидромотор.
11. Способ по п. 9 или 10, в котором этап определения сигнала запроса на расход содержит этап, на котором:
определяют сигнал запроса на расход в соответствии с произведением второго сигнала процента раскрытия и максимального расхода гидравлического привода.
12. Способ по п. 1, в котором функция характеристической кривой расхода является нелинейной функцией характеристической кривой расхода.
13. Устройство управления колебаниями стрелы, содержащее:
принимающее устройство для приема первого входного сигнала от рукоятки;
формирующее устройство для выполнения входного формирования первого входного сигнала для получения второго входного сигнала для ограничения амплитудного коэффициента остаточных колебаний стрелы так, чтобы он не превышал пороговый амплитудный коэффициент остаточных колебаний;
первое определяющее устройство для определения сигнала запроса на расход гидравлического привода для приведения в действие стрелы в соответствии со вторым входным сигналом и максимальным расходом гидравлического привода;
второе определяющее устройство для определения входного сигнала напряжения клапана управления расходом, соединенного с гидравлическим приводом, в соответствии с сигналом запроса на расход и функцией компенсации расхода, где функция компенсации расхода является обратной функцией функции кривой характеристического расхода клапана управления расходом; и
блок управления для управления клапаном управления расходом для работы в соответствии с входным сигналом напряжения.
14. Устройство управления колебаниями стрелы, содержащее:
запоминающее устройство; и
процессор, соединенный с запоминающим устройством, при этом процессор выполнен с возможностью выполнять способ управления колебаниями стрелы, описанный в любом из пп. 1-12, на основе команд, хранящихся в запоминающем устройстве.
15. Машиночитаемый носитель информации, на котором хранится компьютерная программа, которая при выполнении процессором реализует способ управления колебаниями стрелы по любому из пп. 1-12.
16. Инженерная машина, содержащая стрелу и устройство управления колебаниями стрелы по п. 14.
17. Инженерная машина по п. 16, содержащая пожарную машину с выдвижной лестницей или стреловой кран.
| CN 103629293 A, 12.03.2014 | |||
| CN 1141680 A, 29.01.1997 | |||
| US 5285643 A, 15.02.1994 | |||
| US 2004055455 A, 25.03.2004 | |||
| КАТАЛИЗАТОР, СПОСОБ ЕГО ПОЛУЧЕНИЯ (ВАРИАНТЫ) И СПОСОБ ЖИДКОФАЗНОГО АЛКИЛИРОВАНИЯ ИЗОБУТАНА ОЛЕФИНАМИ C-C В ЕГО ПРИСУТСТВИИ | 2010 |
|
RU2445165C1 |

