Область техники, к которой относится изобретение
Настоящее раскрытие относится, в общем, к шумоподавлению, в частности, к системам и способам шумоподавления с использованием технологии субполосного шумоподавления.
Уровень техники
Шумоподавление часто необходимо для подавления шума (например, нежелательного звука, который является неприятным, громким или мешает прослушиванию). Традиционно шум может быть снижен пассивным образом, например, путем устранения (или частичного устранения) источника шума, блокирования передачи шума и/или предотвращения того, чтобы ухо пользователя слышало шум, или т.п. или любую их комбинацию. Эти технологии шумоподавления могут быть пассивными и давать плохой эффект шумоподавления при некоторых условиях (например, когда шум имеет низкую частоту ниже пороговой частоты). Недавно была принята технология активного шумоподавления (ANR) для уменьшения шумов активным образом путем выработки сигнала шумоподавления (например, сигнала, имеющего обратную фазу по отношению к шуму, подлежащему уменьшению). Традиционное устройство ANR может использовать технологию полнополосного шумоподавления, которая позволяет выработать один сигнал коррекции шума с полосой частот, перекрывающей полосу частот шума для подавления шума. Способ субполосного разложения может использоваться при шумоподавлении для улучшения эффекта шумоподавления. Таким образом, желательно предоставить системы и способы шумоподавления с использованием способа субполосного шумоподавления.
Раскрытие сущности изобретения
Предоставлена система шумоподавления. Система может включать в себя датчик субполосного шума, множество модулей субполосного шумоподавления и модуль вывода. Датчик субполосного шума может быть выполнен с возможностью обнаружения шума и выработки множества сигналов субполосного шума в ответ на обнаруженный шум. Каждый из сигналов субполосного шума может иметь отличную от других субполосу из полосы частот шума. Каждый из модулей субполосного шумоподавления может быть выполнен с возможностью приема одного из сигналов субполосного шума от датчика субполосного шума и выработки сигнала коррекции субполосного шума для уменьшения принятого сигнала субполосного шума. Модуль вывода может быть выполнен с возможностью приема сигналов коррекции субполосного шума и вывода сигнала коррекции шума для шумоподавления на основе сигналов коррекции субполосного шума.
В некоторых вариантах осуществления датчик субполосного шума может включать в себя акустоэлектрический преобразователь и модуль разделения полосы. Электроакустический преобразователь может быть выполнен с возможностью обнаружения шума и преобразования шума в электрический сигнал. Модуль разделения полосы может быть подключен к акустоэлектрическому преобразователю и выполнен с возможностью разделения электрического сигнала на сигналы субполосного шума.
В некоторых вариантах осуществления модуль разделения полосы может включать в себя множество полосовых фильтров. Каждый из полосовых фильтров может иметь уникальную частотную характеристику и быть выполнен с возможностью выработки одного из сигналов субполосного шума.
В некоторых вариантах осуществления первый полосовой фильтр из полосовых фильтров может иметь первую частотную характеристику и может быть выполнен с возможностью выработки первого сигнала субполосного шума из сигналов субполосного шума. Второй полосовой фильтр из полосовых фильтров может иметь вторую частотную характеристику и может быть выполнен с возможностью выработки второго сигнала субполосного шума из сигналов субполосного шума. Второй сигнал субполосного шума может быть соседним с первым сигналом субполосного шума среди сигналов субполосного шума в частотной области. Первая частотная характеристика и вторая частотная характеристика могут пересекаться в точке частоты, которая находится рядом по меньшей мере с одной из: точки половинной мощности первой частотной характеристики или точки половинной мощности второй частотной характеристики.
В некоторых вариантах осуществления первая частотная характеристика первого полосового фильтра и вторая частотная характеристика второго полосового фильтра могут иметь одинаковую ширину полосы частот или разные ширины полосы частот.
В некоторых вариантах осуществления модуль субполосного шумоподавления может быть интегрирован в модуль разделения полос.
В некоторых вариантах осуществления датчик субполосного шума может включать в себя множество акустоэлектрических преобразователей и множество модулей дискретизации. Каждый из акустоэлектрических преобразователей может иметь уникальную частотную характеристику и может быть выполнен с возможностью выработки электрического сигнала субполосного шума путем обработки шума. Каждый из модулей дискретизации может быть выполнен с возможностью приема одного электрического сигнала субполосного шума из электрических сигналов субполосного шума и дискретизации принятого электрического сигнала субполосного шума для выработки одного сигнала субполосного шума из сигналов субполосного шума.
В некоторых вариантах осуществления акустоэлектрический преобразователь из акустоэлектрических преобразователей может включать в себя компонент акустического канала и звукочувствительный компонент. Компонент акустического канала может быть выполнен с возможностью фильтрации шума для выработки субполосного шума. Звукочувствительный компонент может быть выполнен с возможностью преобразования субполосного шума в электрический сигнал субполосного шума.
В некоторых вариантах осуществления акустоэлектрический преобразователь из акустоэлектрических преобразователей может включать в себя звукочувствительный компонент. Звукочувствительный компонент может быть выполнен с возможностью преобразования шума в электрический сигнал субполосного шума.
В некоторых вариантах осуществления первый акустоэлектрический преобразователь из акустоэлектрических преобразователей может иметь первую частотную характеристику и может быть выполнен с возможностью выработки электрического сигнала субполосного шума, соответствующего первому сигналу субполосного шума из сигналов субполосного шума. Второй акустоэлектрический преобразователь из акустоэлектрических преобразователей может иметь вторую частотную характеристику и может быть выполнен с возможностью выработки электрического сигнала субполосного шума, соответствующего второму сигналу субполосного шума из сигналов субполосного шума. Второй сигнал субполосного шума может быть соседним с первым сигналом субполосного шума среди сигналов субполосного шума в частотной области. Первая частотная характеристика и вторая частотная характеристика могут пересекаться в точке частоты, которая находится рядом по меньшей мере с одной из: точки половинной мощности первой частотной характеристики или точки половинной мощности второй частотной характеристики.
В некоторых вариантах осуществления первая частотная характеристика первого акустоэлектрического преобразователя и вторая частотная характеристика второго акустоэлектрического преобразователя имеют одинаковую ширину полосы частот или разные ширины полосы частот.
В некоторых вариантах осуществления полосы частот сигналов субполосного шума, вырабатываемых датчиком субполосного шума, могут перекрывать полосу частот шума.
В некоторых вариантах осуществления по меньшей мере один модуль субполосного шумоподавления из модулей субполосного шумоподавления может включать в себя фазовый модулятор и амплитудный модулятор. Фазовый модулятор может быть выполнен с возможностью приема соответствующего сигнала субполосного шума и выработки фазомодулированного сигнала путем модуляции фазы соответствующего сигнала субполосного шума. Амплитудный модулятор может быть выполнен с возможностью приема фазомодулированного сигнала из фазового модулятора и выработки сигнала коррекции субполосного шума для уменьшения соответствующего сигнала субполосного шума путем модуляции амплитуды фазомодулированного сигнала.
В некоторых вариантах осуществления фазовая модуляция соответствующего сигнала субполосного шума может включать в себя инверсию фазы соответствующего сигнала субполосного шума и при необходимости компенсацию смещения фазы соответствующего сигнала субполосного шума при его передаче из датчика субполосного шума в фазовый модулятор.
В некоторых вариантах осуществления по меньшей мере один модуль субполосного шумоподавления из модулей субполосного шумоподавления может включать в себя амплитудный модулятор и фазовый модулятор. Амплитудный модулятор может быть выполнен с возможностью приема соответствующего сигнала субполосного шума и выработки амплитудно-модулированного сигнала путем модуляции амплитуды соответствующего сигнала субполосного шума. Фазовый модулятор может быть выполнен с возможностью приема амплитудно-модулированного сигнала из амплитудного модулятора и выработки сигнала коррекции субполосного шума для уменьшения соответствующего сигнала субполосного шума путем модуляции фазы амплитудно-модулированного сигнала.
В некоторых вариантах осуществления фазовая модуляция амплитудно-модулированного сигнала может включать в себя инверсию фазы амплитудно-модулированного сигнала и при необходимости компенсацию фазового смещения соответствующего сигнала субполосного шума при его передаче из датчика субполосного шума в фазовый модулятор.
В некоторых вариантах осуществления сигнал коррекции шума может включать в себя сигналы коррекции субполосного шума. Модуль вывода может включать в себя множество блоков вывода. Каждый из блоков вывода может быть выполнен с возможностью приема одного из сигналов коррекции субполосного шума, вырабатываемых модулями субполосного шумоподавления, и вывода принятого сигнала коррекции субполосного шума.
В некоторых вариантах осуществления модуль вывода может быть выполнен с возможностью приема сигналов коррекции субполосного шума из модулей субполосного шумоподавления. Модуль вывода также может быть выполнен с возможностью объединения сигналов коррекции субполосного шума для выработки сигнала коррекции шума. Модуль вывода также может быть выполнен с возможностью вывода сигнала коррекции шума.
В некоторых вариантах осуществления шум может включать шум окружающей среды.
В некоторых вариантах осуществления система может дополнительно включать в себя датчик остаточного шума и модуль уменьшения остаточного шума. Датчик остаточного шума может быть выполнен с возможностью обнаружения остаточного шума и выработки сигнала остаточного шума в ответ на обнаруженный остаточный шум. Расстояние между датчиком остаточного шума и модулем вывода может быть меньше, чем расстояние между датчиком субполосного шума и модулем вывода. Модуль уменьшения остаточного шума может быть выполнен с возможностью приема сигнала остаточного шума и выработки сигнала коррекции остаточного шума для уменьшения остаточного шума.
В некоторых вариантах осуществления модуль вывода может быть дополнительно выполнен с возможностью приема сигнала коррекции остаточного шума и вывода сигнала коррекции остаточного шума. Система может дополнительно включать в себя второй модуль вывода, выполненный с возможностью приема сигнала коррекции остаточного шума и вывода сигнала коррекции остаточного шума.
В некоторых вариантах осуществления сигнал остаточного шума, вырабатываемый датчиком остаточного шума, может включать в себя множество сигналов остаточного субполосного шума, и сигнал коррекции остаточного шума может включать в себя множество сигналов коррекции остаточного субполосного шума. Каждый из сигналов коррекции остаточного субполосного шума может быть выполнен с возможностью уменьшения одного из сигналов остаточного субполосного шума.
В некоторых вариантах осуществления система может включать в себя датчик остаточного шума и модуль обратной связи. Датчик остаточного шума может быть выполнен с возможностью обнаружения остаточного шума и выработки сигнала остаточного шума в ответ на обнаруженный остаточный шум. Расстояние между датчиком остаточного шума и модулем вывода может быть меньше, чем расстояние между датчиком субполосного шума и модулем вывода. Модуль обратной связи может быть выполнен с возможностью регулировки модулей субполосного шумоподавления в соответствии с остаточным шумом.
В некоторых вариантах осуществления датчик субполосного шума может быть установлен рядом с модулем вывода или внутри него, и шум может включать в себя остаточный шум.
В некоторых вариантах осуществления сигналы субполосного шума могут быть аналоговыми сигналами, и модули субполосного шумоподавления могут включать в себя компоненты обработки аналоговых сигналов.
В некоторых вариантах осуществления сигналы субполосного шума могут быть цифровыми сигналами, и модули субполосного шумоподавления могут включать в себя компоненты цифровой обработки сигналов.
В некоторых вариантах осуществления модуль вывода может включать в себя электроакустический преобразователь, выполненный с возможностью преобразования сигнала коррекции шума в аудиосигнал и вывода аудиосигнала.
В некоторых вариантах осуществления модуль вывода может включать в себя блок обработки сигналов и электроакустический преобразователь. Блок обработки сигналов может быть выполнен с возможностью обработки сигнала коррекции шума. Электроакустический преобразователь может быть выполнен с возможностью преобразования обработанного сигнала коррекции шума в аудиосигнал и вывода аудиосигнала.
Дополнительные признаки будут частично изложены в последующем описании, и частично станут очевидными для специалистов в данной области техники после прочтения последующего описания со ссылкой на сопроводительные чертежи или могут быть изучены с использованием приведенных примеров или работы с ними. Признаки настоящего раскрытия могут быть реализованы и достигнуты на практике или при использовании различных аспектов методологий, инструментальных средств и комбинаций, изложенных в подробных примерах, приведенных ниже.
Краткое описание чертежей
Настоящее раскрытие далее описывается в терминах примерных вариантов осуществления. Эти примерные варианты осуществления подробно описаны со ссылкой на чертежи. Эти варианты осуществления не являются ограничивающими иллюстративными вариантами осуществления, в которых одинаковые ссылочные позиции представляют аналогичные структуры на нескольких видах чертежей и на которых:
Фиг.1А – схематичное представление, иллюстрирующее примерную систему шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.1B – схематичное представление, иллюстрирующее примерную систему шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.2 – схематичное представление, иллюстрирующее примерное устройство шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.3 – схематичное представление, иллюстрирующее примерное устройство шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.4 – схематичное представление, иллюстрирующее пример датчика субполосного шума согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.5A – примерная частотная характеристика первого полосового фильтра и примерная частотная характеристика второго полосового фильтра модуля разделения полосы согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.5B – частотная характеристика первого полосового фильтра (фиг.5), и другая примерная частотная характеристика второго полосового фильтра (фиг.5) согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.6 – схематичное представление, иллюстрирующее примерный датчик субполосного шума согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.7 – схематичное представление, иллюстрирующее примерный модуль субполосного шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.8 – схематичное представление, иллюстрирующее примерный фазомодулированный сигнал согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.9 – схематичное представление, иллюстрирующее примерный модуль субполосного шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.10 – схематичное представление, иллюстрирующее пример датчика субполосного шума согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.11 – схематичное представление, иллюстрирующее примерную систему шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.12 – схематичное представление, иллюстрирующее примерную систему шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.13 – схематичное представление, иллюстрирующее примерную систему шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия;
фиг.14 – схематичное представление, иллюстрирующее примерную систему шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия; и
фиг.15 – схематичное представление, иллюстрирующее примерную систему шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия.
Осуществление изобретения
В нижеследующем подробном описании многочисленные конкретные детали изложены в виде примеров для того, чтобы обеспечить полное понимание соответствующего раскрытия. Однако специалистам в данной области техники должно быть очевидно, что настоящее раскрытие может применяться на практике без таких подробностей. В других случаях хорошо известные способы, процедуры, системы, компоненты и/или схемы были описаны на относительно высоком уровне без подробностей во избежание излишнего усложнения аспектов настоящего раскрытия. Специалистам в данной области техники будут очевидны различные модификации раскрытых вариантов осуществления, и определенные в данном документе общие принципы могут быть применены к другим вариантам осуществления и заявкам без отклонения от сущности и объема настоящего раскрытия. Таким образом, настоящее раскрытие не ограничивается показанными вариантами осуществления, и должно соответствовать самому широкому объему, соответствующему формуле изобретения.
Следует отметить, что используемые в данном документе термины «система», «механизм», «блок», «модуль» и/или «устройство» представляют собой один из способов различения различных компонентов, элементов, частей, секций или сборок разных уровней в порядке возрастания. Однако термины могут быть заменены другими выражениями, если они служат одной и той же цели.
Следует отметить, что, когда блок, механизм, модуль или устройство упоминаются как «подключенные к», «подсоединенные к» или «связанные с» другим блоком, механизмом, модулем или устройством, он может быть непосредственно подсоединен или подключен к другому блоку, механизму, модулю или блоку, или могут присутствовать промежуточные блок, механизм, модуль или устройство, если из контекста явно не следует обратное. Используемый в данном документе термин «и/или» включает в себя любые и все комбинации одного или нескольких ассоциированных перечисленных элементов.
Используемая в данном документе терминология предназначена только для целей описания конкретных примеров и вариантов осуществления и не предназначена для ограничения. Используемые в данном документе формы единственного числа могут означать также включение форм множественного числа, если из контекста явным образом не следует иное. Кроме того, следует понимать, что используемые в настоящем раскрытии термины «включает в себя» и/или «содержит» указывают на наличие целых чисел, устройств, режимов, заявленных функций, этапов, элементов, операций и/или компонентов, но не исключают наличия или добавления одного или нескольких других целых чисел, устройств, характеристик, функций, этапов, элементов, операций, компонентов и/или их групп.
Пространственные и функциональные отношения между элементами (например, между слоями) описываются с использованием различных терминов, включая «соединенный», «задействованный», «сопряженный» и «связанный». В настоящем раскрытии, если взаимосвязь между первым и вторым элементами не указана явным образом как «прямая», то эта взаимосвязь включает в себя прямую взаимосвязь, при которой между первым и вторым элементами отсутствуют другие промежуточные элементы, а также косвенную взаимосвязь, при которой между первым и вторым элементами присутствуют (пространственно или функционально) один или несколько промежуточных элементов. Напротив, когда элемент упоминается как «непосредственно» соединенный, задействованный, сопряженный или связанный с другим элементом, промежуточные элементы отсутствуют. Кроме того, пространственная и функциональная взаимосвязь между элементами может быть достигнута различными способами. Например, механическое соединение между двумя элементами может включать в себя сварное соединение, шпоночное соединение, штифтовое соединение, соединение с натягом и т.п. или любое их сочетание. Другие слова, используемые для описания взаимосвязи между элементами, следует интерпретировать аналогичным образом (например, «между» или «непосредственно между», «смежный», или «непосредственно смежный» и т.д.).
Один аспект настоящего раскрытия относится к системе шумоподавления. Система шумоподавления может включать в себя датчик субполосного шума, множество модулей субполосного подавления и модуль вывода. Датчик субполосного шума может быть выполнен с возможностью обнаружения шума и выработки множества сигналов субполосного шума в ответ на обнаруженный шум. Каждый из множества сигналов субполосного шума может иметь отличную от других субполосу из полосы частот шума. Каждый из модулей субполосного шумоподавления может быть выполнен с возможностью приема одного из сигналов субполосного шума из датчика субполосного шума и выработки сигнала коррекции субполосного шума для уменьшения принятого сигнала субполосного шума. Модуль вывода может быть выполнен с возможностью приема сигналов коррекции субполосного шума и вывода сигнала коррекции шума для шумоподавления.
Согласно некоторым вариантам осуществления настоящего раскрытия система может уменьшать шум, используя способ субполосного шумоподавления, который может выполнять уменьшение шума в множестве субполос полосы частот шума. По сравнению с технологией полнополосного шумоподавления, который выполняет шумоподавление непосредственно во всей полосе частот шума, способ субполосного шумоподавления позволяет улучшить эффект шумоподавления. В некоторых вариантах осуществления система шумоподавления может использоваться в различных сценариях для уменьшения шумов различных типов. Например, аудиовещательное устройство может включать в себя устройство для уменьшения шума окружающей среды для уменьшения шума окружающей среды и устройство подавления остаточного шума для уменьшения остаточного шума после подавления шума окружающей среды, каждое или одно из которых может быть реализовано с помощью одного или нескольких компонентов системы шумоподавления, описанной выше. Комбинация устройства для уменьшения шума окружающей среды и устройства подавления остаточного шума позволяет эффективно уменьшать нежелательный звук, тем самым повышая производительность аудиовещательного устройства.
На фиг.1A показано схематичное представление, иллюстрирующее примерную систему 100A шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия. Система 100A шумоподавления может быть выполнена с возможностью уменьшения или подавления шума (например, нежелательного звука, который является неприятным, громким или мешает прослушиванию). Система 100A шумоподавления может применяться в различных зонах и/или устройствах, таких как наушники (например, наушники с шумоподавлением, наушники с костной проводимостью), глушитель шума, устройство против храпа и т.п. или любое их сочетание. В некоторых вариантах осуществления система 100A шумоподавления может быть активной системой шумоподавления, которая снижает шум путем выработки сигнала шумоподавления, предназначенного для снижения шума (например, сигнала, который имеет инвертированную фазу по отношению к шуму).
Как показано на фиг.1А, система 100А шумоподавления может включать в себя устройство 120 для уменьшения шума окружающей среды, устройство 150 для уменьшения остаточного шума и модуль 170 вывода. В некоторых вариантах осуществления два или несколько компонентов системы 100А шумоподавления могут быть подключены к и/или взаимодействовать друг с другом. Например, каждое из устройств 120 для уменьшения шума окружающей среды и устройства 150 уменьшения остаточного шума может быть электрически соединено с модулем 170 вывода. Используемое в данном документе соединение между двумя компонентами может включать в себя беспроводное соединение, проводное соединение, любое другое коммуникационное соединение, которое позволяет обеспечивать передачу и/или прием данных, и/или любое сочетание этих соединений. Беспроводное соединение может включать в себя, например, линию связи Bluetooth™, линию связи Wi-Fi™, линию связи WiMax™, линию связи WLAN, линию связи ZigBee, линию связи мобильной сети (например, 3G, 4G, 5G и т.д.), или тому подобное или их сочетание. Проводное соединение может включать в себя, например, коаксиальный кабель, кабель связи (например, телекоммуникационный кабель), гибкий кабель, спиральный кабель, кабель с неметаллической оболочкой, кабель с металлической оболочкой, многожильный кабель, кабель типа витая пара, ленточный кабель, экранированный кабель, двухжильный кабель, оптическое волокно, электрический кабель, оптический кабель, телефонный провод и т.п. или любое их сочетание.
Устройство 120 для уменьшения шума окружающей среды может быть выполнено с возможностью уменьшения шума 110 окружающей среды. Например, как показано на фиг.1А, устройство 120 для уменьшения шума окружающей среды может обнаруживать шум 110 окружающей среды и вырабатывать сигнал 130 коррекции шума окружающей среды для уменьшения шума 110 окружающей среды. Используемый в данном документе термин «шум 110 окружающей среды» может относиться к любому звуку, отличному от желаемого звука. Например, шум 110 окружающей среды может включать в себя фоновый звук (например, шум уличного движения, шум ветра, шум воды, постороннюю речь), который присутствует тогда, когда пользователь носит аудиовещательное устройство (например, наушники). Шум 110 окружающей среды может быть обнаружен устройством 120 для уменьшения шума окружающей среды, когда аудиовещательное устройство воспроизводит звук (например, музыку) или не воспроизводит звук.
В некоторых вариантах осуществления устройство 120 шумоподавления окружающей среды может быть выполнено с возможностью уменьшения шума 110 окружающей среды в соответствии с способом полнополосного шумоподавления или способом субполосного шумоподавления. Способ полнополосного шумоподавления может относиться к способу, который уменьшает шум путем выработки одного сигнала коррекции шума с полосой частот, перекрывающей полосу частот исходного шума. Например, сигнал коррекции шума может быть аналоговым сигналом или цифровым сигналом, имеющим обратную фазу по отношению к шуму. Технология субполосного шумоподавления может относиться к технологии, которая позволяет уменьшить шум посредством выработки множества сигналов коррекции субполосного шума. Каждый из сигналов коррекции субполосного шума может иметь отличную от других субполосу из полосы частот шума (то есть полосу частот, которая является более узкой, чем полоса частот шума и находится внутри нее) и может быть выполнен с возможностью уменьшения участка шума, который имеет отличную от других субполосу.
В некоторых вариантах осуществления устройство 120 для уменьшения шума окружающей среды может включать в себя один или несколько компонентов для реализации технологии субполосного шумоподавления. Например, устройство 120 для уменьшения шума окружающей среды может включать в себя первый датчик субполосного шума и множество первых модулей субполосного шумоподавления. Первый датчик субполосного шума может быть выполнен с возможностью обнаружения шума 110 окружающей среды и выработки множества сигналов субполосного шума окружающей среды. Полоса частот каждого сигнала субполосного шума окружающей среды может быть уже, чем полоса частот шума 110 окружающей среды, и находится в пределах этой полосы. Полосы частот различных сигналов субполосного шума окружающей среды могут отличаться друг от друга. Первые модули субполосного шумоподавления могут быть выполнены с возможностью выработки множества сигналов коррекции субполосного шума окружающей среды на основе сигналов субполосного шума окружающей среды. Каждый из сигналов коррекции субполосного шума окружающей среды может быть аналоговым сигналом или цифровым сигналом, используемым для уменьшения одного из сигналов субполосного шума окружающей среды. Сигналы коррекции субполосного шума окружающей среды могут сформировать сигнал 130 коррекции шума окружающей среды или могут быть обрабатываться (например, объединяться) для выработки сигнала 130 коррекции шума окружающей среды. В некоторых вариантах осуществления устройство 120 для уменьшения окружающего шума может быть реализовано в виде устройства 200 шумоподавления, имеющего один или несколько компонентов, как показано на фиг. 2.
Как показано на фиг.1, сигнал 130 коррекции шума окружающей среды, выработанный устройством 120 для уменьшения шума окружающей среды, может быть передан в модуль 170 вывода для вывода. Модуль 170 вывода может включать в себя электроакустический преобразователь (например, громкоговоритель, аудиоплеер), который может преобразовывать электрический сигнал в аудиосигнал для подавления шума 110 окружающей среды. Например, сигнал 130 коррекции шума окружающей среды может быть первым объединенным сигналом из сигналов коррекции субполосного шума окружающей среды. Модуль 170 вывода может напрямую преобразовывать первый объединенный сигнал в аудиосигнал для вывода. В качестве альтернативы, модуль 170 вывода может включать в себя блок обработки сигналов и электроакустический преобразователь. Блок обработки сигналов может быть выполнен с возможностью обработки первого объединенного сигнала, и электроакустический преобразователь может быть выполнен с возможностью преобразования обработанного первого объединенного сигнала в аудиосигнал для вывода. Только в качестве примера, первый объединенный сигнал может быть цифровым сигналом. Блок обработки сигналов может преобразовывать первый объединенный сигнал в сигнал широтно-импульсной модуляции (ШИМ, PWM) или аналоговый сигнал. Электроакустический преобразователь может дополнительно преобразовывать ШИМ-сигнал или аналоговый сигнал в звук для вывода. В некоторых альтернативных вариантах осуществления блок обработки сигналов модуля 170 вывода может быть интегрирован в устройство 120 для уменьшения шума окружающей среды. Устройство 120 для уменьшения шума окружающей среды может обрабатывать первый объединенный сигнал и передавать обработанный первый объединенный сигнал в модуль 170 вывода для вывода.
В некоторых вариантах осуществления сигнал 130 коррекции шума окружающей среды может включать в себя множество сигналов коррекции субполосного шума окружающей среды, как указано выше. Модуль 170 вывода может включать в себя множество блоков вывода, каждый из которых может включать в себя электроакустический преобразователь и при необходимости блок обработки сигналов. Каждый из сигналов коррекции субполосного шума окружающей среды может передаваться параллельно в один из блоков вывода для вывода. Вывод сигнала коррекции субполосного шума окружающей среды блоком вывода может быть выполнен аналогично первому объединенному сигналу из сигналов коррекции субполосного шума окружающей среды модулем 170 вывода, как описано выше.
Аудиосигнал для уменьшения шума 110 окружающей среды, выводимый модулем 170 вывода, может взаимодействовать с окружающим шумом 110, причем помехи могут подавлять или частично подавлять шум 110 окружающей среды, как показано на фиг.1А пунктирной линией, соединяющей аудиосигнал, выводимый модулем 170 вывода и шум 110 окружающей среды. В некоторых вариантах осуществления может присутствовать остаточный шум 140 после подавления шума 110 окружающей среды. Устройство 150 для уменьшения остаточного шума может служить механизмом обратной связи системы 100А шумоподавления для уменьшения остаточного шума 140. Например, как показано на фиг.1А, устройство 150 уменьшения остаточного шума может обнаруживать остаточный шум 140 и вырабатывать сигнал 160 коррекции остаточного шума для уменьшения остаточного шума 140.
В некоторых вариантах осуществления устройство 150 для уменьшения остаточного шума может быть выполнено с возможностью уменьшения остаточного шума 140 в соответствии с технологией полнополосного шумоподавления или технологией субполосного шумоподавления, как указано выше. Например, устройство 150 для уменьшения остаточного шума может вырабатывать одиночный сигнал 160 коррекции остаточного шума, который имеет ту же полосу частот, что и остаточный шум 140, но с обратной фазой, для уменьшения остаточного шума 140. В качестве другого примера, устройство подавления остаточного шума 150 может включать в себя один или несколько компонентов для реализации технологии субполосного шумоподавления, таких как второй датчик субполосного шума и множество вторых модулей субполосного шумоподавления. Расстояние между датчиком второго субполосного шума может быть меньше, чем расстояние между датчиком устройства 120 для уменьшения шума окружающей среды, для измерения шума 110 окружающей среды (например, датчиком первого субполосного шума, как описано выше) с тем, чтобы второй датчик субполосного шума мог обнаруживать остаточный шум 140. В ответ на остаточный шум 140 второй датчик субполосного шума может вырабатывать множество сигналов остаточного субполосного шума, каждый из которых может иметь отличную от других субполосу полосы частот остаточного шума 140. Каждый второй модуль субполосного шумоподавления может быть выполнен с возможностью приема одного из сигналов остаточного субполосного шума из второго датчика субполосного шума и выработки сигнала коррекции остаточного субполосного шума для уменьшения принятого сигнала остаточного субполосного шума. Сигналы коррекции остаточного субполосного шума могут сформировать сигнал 160 коррекции остаточного шума или могут быть обработаны (например, объединены) для выработки сигнала 160 коррекции остаточного шума. В некоторых вариантах осуществления устройство 150 для уменьшения остаточного шума может быть реализовано в виде устройства 200 подавления шума, имеющего один или несколько компонентов, показанных на фиг. 2, и/или устройства 150C для уменьшения остаточного шума, имеющего один или несколько компонентов, показанных на фиг. 14.
Сигнал 160 коррекции остаточного шума, выработанный устройством 150 для уменьшения остаточного шума, может быть передан в модуль 170 вывода для вывода. Вывод сигнала 160 коррекции остаточного шума может быть реализован аналогично выводу сигнала 130 коррекции шума окружающей среды, как описано выше. Например, модуль 170 вывода может преобразовать сигнал 160 коррекции остаточного шума в аудиосигнал для уменьшения остаточного шума 140. Аудиосигнал для уменьшения остаточного шума 140 может быть выведен вместе с аудиосигналом для уменьшения шума 110 окружающей среды, как описано выше. Аудиосигнал для уменьшения остаточного шума 140 может взаимодействовать с остаточным шумом 140, как показано на фиг.1А пунктирной линией, соединяющей аудиосигнал, выводимый модулем 170 вывода, и остаточный шум 140. В некоторых вариантах осуществления модуль 170 вывода может выводить по отдельности сигнал 130 коррекции шума окружающей среды и сигнал 160 коррекции остаточного шума. Альтернативно, сигнал 130 коррекции шума окружающей среды и сигнал 160 коррекции остаточного шума могут быть объединены для выработки второго объединенного сигнала, который может быть дополнительно выведен модулем 170 вывода для подавления шума 110 окружающей среды и остаточного шума 140.
В некоторых альтернативных вариантах осуществления вместо выработки сигнала 160 коррекции остаточного шума устройство 150 для уменьшения остаточного шума может передавать сигнал обратной связи в устройство 120 для уменьшения шума окружающей среды в соответствии с обнаруженным остаточным шумом 140. Например, сигнал обратной связи может вырабатываться модулем обратной связи устройства 150 для уменьшения остаточного шума и включать в себя информацию, относящуюся к остаточному шуму 140. Устройство 120 для уменьшения шума окружающей среды может отрегулировать еще один параметр, относящийся к формированию сигнала 130 коррекции шума окружающей среды, таким образом, чтобы мог вырабатываться отрегулированный сигнал 130 коррекции шума окружающей среды для более эффективного подавления шума 110 окружающей среды. В качестве другого примера, сигнал обратной связи может включать в себя инструкцию, предписывающую устройству 120 для уменьшения шума окружающей среды отрегулировать один или более параметров, относящихся к формированию сигнала 130 коррекции шума окружающей среды. Дополнительные описания, касающиеся модуля обратной связи и/или регулировки одного или нескольких параметров, относящихся к выработке сигнала 130 коррекции шума окружающей среды, можно найти в другом месте настоящего раскрытия. Смотри, например, фиг.13 и ее соответствующее описание.
В некоторых вариантах осуществления система 100A шумоподавления может применяться к аудиовещательному устройству. Компонент системы шумоподавления 100А может быть установлен в любом месте аудиовещательного устройства. Например, устройство 120 для уменьшения шума окружающей среды или его часть (например, датчик для обнаружения шума 110 окружающей среды) может быть установлено снаружи аудиовещательного устройства. Модуль 170 вывода может быть установлен внутри аудиовещательного устройства. Модуль 170 вывода может быть выполнен с возможностью вывода сигнала(ов) коррекции шума и при необходимости служить в качестве компонента вывода аудиовещательного устройства для вывода желаемого звука (например, музыки). Устройство 150 для уменьшения остаточного шума или его часть (например, датчик для обнаружения остаточного шума 140) может быть установлено рядом с модулем 170 вывода или внутри него.
На фиг.1B показано схематичное представление, иллюстрирующее примерную систему 100B шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия. Система 100B шумоподавления может быть аналогична системе 100A шумоподавления, описанной со ссылкой на фиг.1А, за исключением того, что система 100В шумоподавления может включать в себя модуль 170 вывода и дополнительный модуль 180 вывода. Как показано на фиг.1B, модуль 170 вывода может быть электрически соединен с устройством 120 для уменьшения шума окружающей среды для вывода сигнала 130 коррекции шума окружающей среды. Модуль 180 вывода может быть электрически соединен с устройством 150 для уменьшения остаточного шума для вывода сигнала 160 коррекции остаточного шума.
Следует отметить, что приведенное выше описание систем 100A и 100B шумоподавления предназначено для иллюстрации, а не для ограничения объема настоящего раскрытия. Специалистам в данной области техники будут очевидны многие альтернативы, модификации и вариации. Признаки, структуры, способы и другие характеристики иллюстративных вариантов осуществления, описанных в данном документе, могут быть объединены различными способами для получения дополнительных и/или альтернативных иллюстративных вариантов осуществления. Например, система 100А шумоподавления и/или система 100В шумоподавления могут включать в себя один или несколько дополнительных компонентов. Дополнительно или альтернативно, могут быть исключены один или несколько компонентов системы 100А шумоподавления и/или системы 100В шумоподавления, описанных выше. Например, может быть исключено одно из устройства 120 для уменьшения шума окружающей среды и устройства 150 для уменьшения остаточного шума. В качестве другого примера, два или несколько компонентов системы 100А шумоподавления и/или системы 100В шумоподавления могут быть объединены в один компонент. Только в качестве примера, в системе 100B шумоподавления модуль 170 вывода может быть интегрирован в устройство 120 для уменьшения шума окружающей среды, и/или модуль 180 вывода может быть интегрирован в устройство 150 для уменьшения остаточного шума.
На фиг.2 показана схематичное представление, иллюстрирующее примерное устройство 200 шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия. Устройство 200 шумоподавления может быть выполнено с возможностью шумоподавления 210 с использованием технологии субполосного шумоподавления, как описано в другом месте в настоящем раскрытии (например, смотри фиг.1А и соответствующее описание).
Как показано на фиг.2, устройство 200 шумоподавления может включать в себя датчик 220 субполосного шума, множество модулей 230 субполосного шумоподавления и объединенный модуль 240. Устройство 200 шумоподавления может быть подключено к модулю 170 вывода. Датчик 220 полосового шума может быть выполнен с возможностью обнаружения шума 210 (например, шума 110 окружающей среды или остаточного шума 140, как описано со ссылкой на фиг.1) и выработки множества сигналов субполосного шума (например, сигналов S1-Sm субполосного шума) в ответ на обнаруженный шум. «m» может быть любым положительным целым числом больше 1, таким как 5, 10, 15 и т.п.
Шум 210 может быть аудиосигналом, имеющим определенную полосу частот. Сигнал субполосного шума может относиться к сигналу, имеющему более узкую полосу частот, чем полоса частот шума 210, и находится в ней. Например, шум 210 может иметь полосу частот в диапазоне от 10 Гц до 30000 Гц. Полоса частот сигнала субполосного шума может составлять 100-200 Гц, что находится в пределах полосы частот шума 210. В некоторых вариантах осуществления объединение полос частот сигналов субполосного шума может охватывать полосу частот шума 210. Дополнительно или альтернативно, по меньшей мере два из сигналов субполосного шума могут иметь разные полосы частот. При необходимости каждый из сигналов субполосного шума может иметь отличительную полосу частот, отличную от одной или более полос частот одного или более других сигналов субполосного шума. Разные сигналы субполосного шума могут иметь одинаковую ширину полосы частот или разные ширины полосы частот. В некоторых вариантах осуществления можно избежать перекрытия между полосами частот пары соседних сигналов субполосного шума в частотной области для того, чтобы улучшить эффект шумоподавления. В данном документе два сигнала субполосного шума, чьи центральные частоты являются соседними друг с другом среди сигналов субполосного шума, могут рассматриваться как соседние друг с другом в частотной области. Дополнительное описание, касающееся частотных диапазонов пары соседних сигналов субполосного шума, можно найти в другом месте настоящего раскрытия. Смотри, например, фиг.5А и 5В и их соответствующее описание.
В некоторых вариантах осуществления сигналы субполосного шума, вырабатываемые датчиком 220 субполосного шума, могут быть цифровыми сигналами или аналоговыми сигналами. В иллюстративных целях, если не указано иное или очевидно из контекста, настоящее раскрытие описано со ссылкой на сигналы субполосного шума в виде цифровых сигналов и не предназначено для ограничения объема настоящего раскрытия. В некоторых вариантах осуществления датчик 220 субполосного шума может включать в себя один или несколько компонентов, как показано на фиг.4, который может быть выполнен с возможностью преобразования шума 210 в электрический сигнал и разделения электрического сигнала на сигналы субполосного шума. В качестве альтернативы, датчик 220 субполосного шума может включать в себя один или несколько компонентов, как показано на фиг.6, которые могут быть выполнены с возможностью выработки множества электрических сигналов субполосного шума путем обработки шума 210 и дискретизации электрических сигналов субполосного шума для выработки сигналов субполосного шума. Дополнительное описание, касающееся датчика 220 субполосного шума, можно найти в другом месте настоящего раскрытия. Смотри, например, фиг.4-6 и их соответствующее описание.
Модули 230 субполосного шумоподавления могут включать в себя модуль 230-1 субполосного шумоподавления, модуль 230-2 субполосного шумоподавления, … и модуль 230-m субполосного шумоподавления, как показано на фиг.2. В некоторых вариантах осуществления количество (или число) модулей 230 субполосного шумоподавления может быть равно количеству (или числу) сигналов субполосного шума, вырабатываемых датчиком 220 субполосного шума. Каждый из модулей 230 субполосного шумоподавления может быть выполнен с возможностью приема одного из сигналов субполосного шума из датчика 220 субполосного шума и выработки сигнала коррекции субполосного шума для уменьшения принятого сигнала субполосного шума. Например, как показано на фиг.2, модуль 230-i субполосного шумоподавления (где i – положительное целое число, равное или меньшее m) может принимать сигнал Si субполосного шума из датчика 220 субполосного шума и вырабатывать сигнал Ci коррекции субполосного шума для уменьшения сигнала Si субполосного шума.
В некоторых вариантах осуществления сигналы субполосного шума могут передаваться посредством параллельных передатчиков из датчика 220 субполосного шума в модули 230 субполосного шумоподавления. При необходимости сигнал субполосного шума может передаваться посредством передатчика согласно определенному протоколу связи для передачи цифровых сигналов. Примерные протоколы связи могут включать в себя общество звукоинженеров (Audio Engineering Society, AES3), Европейский вещательный союз (European Broadcast Union, EBU), AES/EBU, автоматический накопитель и передача данных (Automatic Data Accumulator and Transfer, ADAT), интерфейс звука межинтегральной схемы I (Inter-IC Sound, 2S), мультиплексирование с временным разделением каналов (Time Division Multiplexing, TDM), цифровой интерфейс музыкальных инструментов (Musical Instrument Digital Interface, MIDI), CobraNet, мост аудио-видео (Ethernet Audio/VideoBridging, Ethernet AVB), Dante, международный союз электросвязи (International Telecommunication Union, ITU)-T G.728, ITU-T G.711, ITU-T G.722, ITU-T G.722.1, ITU-T G.722.1 приложение C, усовершенствованное кодирование аудио (Advanced Audio, AAC)-LD и т.п. или их сочетание. Цифровой сигнал может передаваться в определенном формате, включая компакт-диск (Compact Disc, CD), WAVE, формат файла обмена аудио (Audio Interchange File Format, AIFF), MPEG (группа экспертов по движущимся изображениям, Moving Picture Experts Group)-1, MPEG-2, MPEG-3, MPEG-4, цифровой интерфейс музыкальных инструментов (Musical Instrument Digital Interface, MIDI), формат аудиофайла для Windows (Windows Media Audio, WMA), RealAudio, векторное квантование с трансформными доменами и взвешенным чередованием (Transform-domain Weighted Interleave Vector Quantization VQF), адаптивное кодирование с переменной скоростью (Adaptive Multi-Rate, AMR), APE, бесплатный аудиокодек без потерь (Free Lossless Audio Codec, FLAC), усовершенствованное кодирование аудио (Advanced Audio, AAC) и т.п. или их сочетание. В некоторых альтернативных вариантах осуществления сигналы субполосного шума могут быть преобразованы в одноканальный сигнал с использованием, например, способа мультиплексирования с частотным разделением каналов и переданы в модули 230 субполосного шумоподавления.
В некоторых вариантах осуществления модуль 230-i субполосного шумоподавления может выполнять фазовую модуляцию и/или амплитудную модуляцию сигнала Si субполосного шума для выработки соответствующего сигнала Ci коррекции субполосного шума. В некоторых вариантах осуществления фазовая модуляция и амплитудная модуляция могут выполняться последовательно или одновременно с сигналом Si субполосного шума. Например, модуль 230-i субполосного шумоподавления может сначала выполнить фазовую модуляцию сигнала Si субполосного шума для выработки фазомодулированного сигнала, и затем выполнить амплитудную модуляцию фазомодулированного сигнала для выработки соответствующего сигнала Ci коррекции субполосного шума. Фазовая модуляция сигнала Si субполосного шума может включать в себя инверсию фазы сигнала Si субполосного шума. При необходимости в некоторых вариантах осуществления смещение (или сдвиг) фазы шума 210 может происходить во время его передачи из местоположения в датчике 220 субполосного шума в местоположение в модуле 170 вывода (например, из местоположения за пределами аудиовещательного устройства в местоположение в громкоговорителе внутри аудиовещательного устройства). Фазовая модуляция сигнала Si субполосного шума может дополнительно включать в себя компенсацию смещения фазы сигнала Si субполосного шума во время передачи сигнала. В качестве альтернативы, модуль 230-i субполосного шумоподавления может сначала выполнить амплитудную модуляцию сигнала Si субполосного шума, чтобы выработать амплитудно-модулированный сигнал, и затем выполнить фазовую модуляцию амплитудно-модулированного сигнала, чтобы выработать сигнал Ci коррекции субполосного шума. Дополнительные описания, относящиеся к модулю 230-i субполосного шумоподавления, можно найти в другом месте настоящего раскрытия. Смотри, например, фиг.7-9 и их соответствующее описание.
Модуль 240 объединения может быть выполнен с возможностью объединения сигналов коррекции субполосного шума для выработки сигнала коррекции шума, как показано на фиг.2. Модуль 240 объединения может включать в себя любой компонент, который может объединять множество сигналов. Например, модуль 240 объединения может вырабатывать смешанный сигнал (то есть сигнал коррекции шума) в соответствии с способом объединения сигналов, таким как способ мультиплексирования с частотным каналом. В некоторых альтернативных вариантах осуществления модуль 240 объединения может быть независимым компонентом или частью компонента (например, модуля 170 вывода), отличного от устройства 200 шумоподавления. В качестве альтернативы, модуль 240 объединения может быть опущен, и сигналы коррекции субполосного шума могут быть переданы параллельно в модуль 170 вывода для вывода, как описано со ссылкой на фиг.3.
Модуль 170 вывода может быть выполнен с возможностью приема сигнала коррекции шума из объединенного модуля 240. Вывод сигнала коррекции шума модулем 170 вывода может выполняться аналогично сигналу 130 коррекции шума окружающей среды, как описано со ссылкой на фиг.1А. Например, модуль 170 вывода может преобразовывать сигнал коррекции шума в аудиосигнал для вывода или обрабатывать сигнал коррекции шума и преобразовывать обработанный сигнал коррекции шума в аудиосигнал для вывода.
В некоторых вариантах осуществления один или несколько компонентов системы 100А шумоподавления (или системы 100В шумоподавления) могут быть реализованы на одном или более компонентах устройства 200 шумоподавления, соответственно или совместно. Например, устройство 120 для уменьшения шума окружающей среды может быть реализовано с помощью одного или нескольких компонентов устройства 200 шумоподавления. Датчик 220 субполосного шума устройства 120 для уменьшения шума окружающей среды может находиться на расстоянии, превышающем пороговое расстояние, от модуля 170 вывода для обнаружения шума окружающей среды. Только в качестве примера, датчик 220 субполосного шума может быть установлен снаружи аудиовещательного устройства, и модуль 170 вывода может быть установлен внутри аудиовещательного устройства. Дополнительно или альтернативно, устройство 150 для уменьшения остаточного шума может быть реализовано одним или несколькими компонентами устройства 200 шумоподавления. Датчик 220 субполосного шума устройства 150 для уменьшения остаточного шума может быть установлен рядом или внутри модуля 170 вывода (например, расположен в пределах порогового расстояния от модуля 170 вывода) для обнаружения остаточного шума при шумоподавлении. Например, датчик 220 субполосного шума и модуль 170 вывода могут быть установлены в аудиовещательном устройстве рядом друг с другом.
На фиг.3 показано схематичное представление, иллюстрирующее примерное устройство 300 шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия. Устройство 300 шумоподавления может быть аналогично устройству 200 шумоподавления, за исключением некоторых компонентов или признаков. Как показано на фиг.3, модуль 170 вывода может включать в себя множество модулей 170-1, 170-2, … и 170-m вывода. Сигналы коррекции субполосного шума, вырабатываемые модулями 230 субполосного шумоподавления, могут быть переданы в блоки 170 вывода параллельно без объединения. Каждый из блоков вывода может быть выполнен с возможностью приема одного из сигналов коррекции субполосного шума и вывода принятого сигнала коррекции субполосного шума. В некоторых вариантах осуществления, аналогично устройству 200 шумоподавления, устройство 300 шумоподавления может использоваться для реализации одного или нескольких компонентов системы 100А шумоподавления (или системы 100В шумоподавления), таких как устройство 120 шумоподавления и/или устройство 150 для уменьшения остаточного шума.
Следует отметить, что приведенное выше описание устройств 200 и 300 шумоподавления предназначено для иллюстрации, а не для ограничения объема настоящего раскрытия. Специалистам в данной области техники будут очевидны многие альтернативы, модификации и вариации. Признаки, структуры, способы и другие характеристики иллюстративных вариантов осуществления, описанных в данном документе, могут быть объединены различными способами для получения дополнительных и/или альтернативных иллюстративных вариантов осуществления. Например, устройство 200 шумоподавления и/или устройство 300 шумоподавления могут включать в себя один или несколько дополнительных компонентов. Дополнительно или альтернативно, могут быть исключены один или несколько компонентов устройства 200 шумоподавления и/или устройства 300 шумоподавления, описанных выше, таких как объединенный модуль 240. В качестве другого примера, могут быть объединены в один компонент два или несколько компонентов устройства 200 шумоподавления и/или системы 300 шумоподавления. Только в качестве примера, модуль 240 объединения и/или модуль 170 вывода устройства 200 шумоподавления могут быть интегрированы в модуль 230 субполосного шумоподавления устройства 200 шумоподавления.
На фиг.4 показано схематичное представление, иллюстрирующее примерный датчик 220A субполосного шума согласно некоторым вариантам осуществления настоящего раскрытия. Датчик 220A субполосного шума может быть примерным вариантом осуществления субполосного датчика 220 шума, как описано со ссылкой на фиг.2. Как показано на фиг.4, датчик 220A субполосного шума может включать в себя акустоэлектрический преобразователь 410 и модуль 420 разделения полосы, подключенный к акустоэлектрическому преобразователю 410.
Электроакустический преобразователь 410 может быть выполнен с возможностью обнаружения шума 210 и преобразования шума 210 в электрический сигнал. Полоса частот электрического сигнала может быть такой же (или по существу такой же), как и шум 210. Электроакустический преобразователь 410 может включать в себя микрофон, гидрофон, акустооптический модулятор (АОМ) или любое другое устройство, которое может преобразовывать аудиосигналы в электрические сигналы или любое их сочетание.
Модуль 420 разделения полосы может быть выполнен с возможностью разделения электрического сигнала на множество сигналов субполосного шума (например, сигналы S1-Sm субполосного шума). В некоторых вариантах осуществления модуль 420 разделения полосы может включать в себя множество полосовых фильтров. Каждый из полосовых фильтров может иметь уникальную частотную характеристику и может быть выполнен с возможностью выработки одного из сигналов субполосного шума путем обработки электрического сигнала. Частотная характеристика полосового фильтра может относиться к количественному показателю выходного спектра полосового фильтра (то есть соответствующего сигнала субполосного шума) в ответ на входной сигнал (то есть электрический сигнал). Например, частотная характеристика полосового фильтра может включать в себя центральную частоту, ширину полосы частот, частоту среза и т.п. или любое их сочетание.
В некоторых вариантах осуществления объединение полос частот сигналов субполосного шума может охватывать полосу частот шума 210. Ширины полосы частот различных сигналов субполосного шума могут быть одинаковыми или отличаться друг от друга. Дополнительно или альтернативно, можно избежать перекрытия между полосами частот пары соседних сигналов субполосного шума в частотной области. С этой целью в некоторых вариантах осуществления частотные характеристики двух полосовых фильтров, которые вырабатывают пару соседних сигналов субполосного шума, могут пересекаться в определенной точке частоты, удовлетворяющей определенному условию.
В иллюстративных целях на фиг.5A показана примерная частотная характеристика 510 первого полосового фильтра и примерная частотная характеристика 520 второго полосового фильтра согласно некоторым вариантам осуществления настоящего раскрытия. На фиг.5B показана частотная характеристика 510 первого полосового фильтра и другая примерная частотная характеристика 530 второго полосового фильтра согласно некоторым вариантам осуществления настоящего раскрытия. Первый полосовой фильтр может быть выполнен с возможностью обработки электрического сигнала, вырабатываемого акустоэлектрическим преобразователем 410, для выработки первого сигнала субполосного шума из сигналов субполосного шума. Второй полосовой фильтр может быть выполнен с возможностью обработки электрического сигнала, вырабатываемого акустоэлектрическим преобразователем 410, для выработки второго сигнала субполосного шума из сигналов субполосного шума. Второй сигнал субполосного шума может быть соседним с первым сигналом субполосного шума среди сигналов субполосного шума в частотной области.
В некоторых вариантах осуществления частотные характеристики первого и второго полосовых фильтров могут иметь одинаковую ширину полосы частот. Например, как показано на фиг.5A, частотная характеристика 510 первого полосового фильтра имеет нижнюю точку  половинной мощности, верхнюю точку
половинной мощности, верхнюю точку  половинной мощности и центральную частоту
половинной мощности и центральную частоту  . Используемая в данном документе точка половинной мощности определенной частотной характеристики может относиться к точке частоты с определенным ослаблением уровня мощности (например, -3 дБ). Ширина полосы частот частотной характеристики 510 может быть равна разности между и . Частотная характеристика 520 второго полосового фильтра имеет нижнюю точку половинной мощности, верхнюю точку
. Используемая в данном документе точка половинной мощности определенной частотной характеристики может относиться к точке частоты с определенным ослаблением уровня мощности (например, -3 дБ). Ширина полосы частот частотной характеристики 510 может быть равна разности между и . Частотная характеристика 520 второго полосового фильтра имеет нижнюю точку половинной мощности, верхнюю точку  половинной мощности и центральную частоту
половинной мощности и центральную частоту  . Ширина полосы частот частотной характеристики 520 может быть равна разности между и . Ширины полосы частот первого и второго полосовых фильтров могут быть равны друг другу.
. Ширина полосы частот частотной характеристики 520 может быть равна разности между и . Ширины полосы частот первого и второго полосовых фильтров могут быть равны друг другу.
Альтернативно, частотные характеристики первого и второго полосовых фильтров могут иметь разные ширины полосы частот. Например, как показано на фиг.5В, частотная характеристика 530 второго полосового фильтра имеет нижнюю точку половинной мощности, верхнюю точку  половинной мощности (которая больше чем ) и центральную частоту
половинной мощности (которая больше чем ) и центральную частоту  . Ширина полосы частот частотной характеристики 530 второго полосового фильтра может быть равна разности между и , которая может быть больше, чем у частотной характеристики 510 первого полосового фильтра. Таким образом, в модуле 420 разделения полосы частот может потребоваться меньшее количество полосовых фильтров для выработки множества сигналов субполосного шума для охвата полосы частот шума 210.
. Ширина полосы частот частотной характеристики 530 второго полосового фильтра может быть равна разности между и , которая может быть больше, чем у частотной характеристики 510 первого полосового фильтра. Таким образом, в модуле 420 разделения полосы частот может потребоваться меньшее количество полосовых фильтров для выработки множества сигналов субполосного шума для охвата полосы частот шума 210.
В некоторых вариантах осуществления частотные характеристики первого полосового фильтра и второго полосового фильтра могут пересекаться в определенной точке частоты. В некоторых вариантах осуществления определенная точка частоты, в которой пересекаются частотные характеристики первого и второго полосовых фильтров, может находиться рядом с точкой половинной мощности частотной характеристики первого полосового фильтра и/или точкой половинной мощности частотной характеристики второго полосового фильтра. Взяв в качестве примера фиг.5A, частотная характеристика 510 и частотная характеристика 520 пересекаются в верхней точке  половинной мощности частотной характеристики 510, которая также является нижней точкой половинной мощности частотной характеристики 520. Используемая в данном документе точка частоты может считаться близкой к точке половинной мощности, если разность уровней мощности между точкой частоты и точкой половинной мощности не превышает порогового значения (например, 2 дБ). В таких случаях могут быть меньшие потери или повторение энергии в частотных характеристиках первого и второго полосовых фильтров, что может привести к надлежащему диапазону перекрытия между частотными характеристиками первого и второго полосовых фильтров. В некоторых вариантах осуществления диапазон перекрытия может считаться относительно небольшим, когда частотные характеристики пересекаются в точке частоты с уровнем мощности больше -5 дБ и/или меньше -1 дБ. В некоторых вариантах осуществления центральные частоты и/или ширины полосы пропускания частотных характеристик первого и второго полосовых фильтров могут быть отрегулированы для получения более узкого или надлежащего диапазона перекрытия между частотными характеристиками первого и второго полосовых фильтров во избежание перекрытия между полосами частот первого и второго сигналов субполосного шума. В некоторых вариантах осуществления частотная характеристика модуля 420 разделения полосы частот может иметь флуктуации уровня мощности в пределах ±1 дБ.
половинной мощности частотной характеристики 510, которая также является нижней точкой половинной мощности частотной характеристики 520. Используемая в данном документе точка частоты может считаться близкой к точке половинной мощности, если разность уровней мощности между точкой частоты и точкой половинной мощности не превышает порогового значения (например, 2 дБ). В таких случаях могут быть меньшие потери или повторение энергии в частотных характеристиках первого и второго полосовых фильтров, что может привести к надлежащему диапазону перекрытия между частотными характеристиками первого и второго полосовых фильтров. В некоторых вариантах осуществления диапазон перекрытия может считаться относительно небольшим, когда частотные характеристики пересекаются в точке частоты с уровнем мощности больше -5 дБ и/или меньше -1 дБ. В некоторых вариантах осуществления центральные частоты и/или ширины полосы пропускания частотных характеристик первого и второго полосовых фильтров могут быть отрегулированы для получения более узкого или надлежащего диапазона перекрытия между частотными характеристиками первого и второго полосовых фильтров во избежание перекрытия между полосами частот первого и второго сигналов субполосного шума. В некоторых вариантах осуществления частотная характеристика модуля 420 разделения полосы частот может иметь флуктуации уровня мощности в пределах ±1 дБ.
Следует отметить, что примеры, показанные на фиг.5А и 5В, предназначены для иллюстрации, а не для ограничения объема настоящего раскрытия. Специалист в данной области техники может сделать многочисленные изменения и модификации в соответствии с идеями настоящего раскрытия. Однако эти вариации и модификации не выходят за рамки настоящего раскрытия. Например, один или более параметров (например, ширина полосы частот, верхняя точка половинной мощности, нижняя точка половинной мощности и/или центральная частота) частотной характеристики первого полосового фильтра и/или второго полосового фильтра могут быть переменными.
В некоторых вариантах осуществления полосовые фильтры модуля 420 разделения полосы могут включать в себя фильтр Баттерворта, фильтр Чебышева, фильтр Кауэра и т.п. или любое их сочетание. Крутизна фронта частотной характеристики полосового фильтра может быть связана с типом и/или порядком полосового фильтра. Например, крутизна фронта фильтра Баттерворта определенного порядка может быть больше, чем у фильтра Чебышева того же порядка. Крутизна фронта фильтра Чебышева определенного порядка может быть больше, чем у фильтра Кауэра того же порядка. Для определенного полосового фильтра, имеющего определенную центральную частоту, крутизна фронта частотной характеристики полосового фильтра может возрастать с порядком полосового фильтра. В некоторых вариантах осуществления тип полосового фильтра модуля 420 разделения полосы частот может быть выбран в соответствии с полосой частот шума 210, подлежащего уменьшению. Например, для подавления шума с узкой шириной полосы пропускания (например, с шириной полосы частот меньше, чем первая пороговая ширина полосы пропускания), такого как низкочастотный шум или высокочастотный шум с узкой шириной полосы пропускания, может использоваться полосовой фильтр, имеющий высокий порядок (например, порядок выше порогового порядка) и узкую ширину полосы пропускания (например, ширину полосу частот меньше второй пороговой ширины полосы пропускания). Первая и вторая пороговые ширины полосы пропускания могут быть одинаковыми или отличаться друг от друга.
В некоторых вариантах осуществления полосовой фильтр модуля 420 разделения полосы может быть фильтром с конечной импульсной характеристикой, чья импульсная характеристика имеет конечную длительность, или фильтром с бесконечной импульсной характеристикой, которая линейно зависит от конечного числа входных выборок и конечного числа предыдущих выходов фильтра.
В некоторых вариантах осуществления сигналы субполосного шума, вырабатываемые модулем 420 разделения полосы, могут выводиться параллельно (например, через множество электрических кабелей) для дальнейшей обработки. Например, каждый полосовой фильтр модуля 420 разделения полосы может быть электрически соединен с модулем субполосного шумоподавления (например, модулем 230 субполосного шумоподавления), причем сигнал субполосного шума, вырабатываемый полосовой фильтр может передаваться в подключенный модуль субполосного шумоподавления для выработки соответствующего сигнала коррекции субполосного шума. Альтернативно, сигналы субполосного шума могут быть обработаны для выработки одноканального сигнала с использованием, например, способа мультиплексирования с частотным разделением каналов, и выведены для дальнейшей обработки. В некоторых вариантах осуществления множество модулей субполосного шумоподавления может быть интегрировано в модуль 420 разделения полосы. Интегрированный модуль разделения полосы может вырабатывать сигналы субполосного шума и дополнительно вырабатывать множество сигналов коррекции субполосного шума для уменьшения сигналов субполосного шума. Дополнительное описание, относящееся к интегрированному модулю разделения полосы частот, можно найти в другом месте настоящего раскрытия. Смотри, например, фиг.10 и ее соответствующее описание.
Следует отметить, что приведенное выше описание датчика 220A субполосного шума предназначено для иллюстрации, а не для ограничения объема настоящего раскрытия. Специалистам в данной области техники будут очевидны многие альтернативы, модификации и вариации. Признаки, структуры, способы и другие характеристики иллюстративных вариантов осуществления, описанных в данном документе, могут быть объединены различными способами для получения дополнительных и/или альтернативных иллюстративных вариантов осуществления. Например, датчик 220A субполосного шума может включать в себя один или несколько дополнительных компонентов. Дополнительно или альтернативно, могут быть исключены один или несколько компонентов датчика 220A субполосного шума, описанного выше. В качестве другого примера, могут быть интегрированы в один компонент два или несколько компонентов датчика 220А субполосных шумов.
На фиг.6 показано схематичное представление, иллюстрирующее пример датчика 220B субполосного шума согласно некоторым вариантам осуществления настоящего раскрытия. Датчик 220B субполосного шума может быть примерным вариантом осуществления датчика 220 субполосного шума, как описано со ссылкой на фиг.2. Датчик 220B субполосного шума может быть выполнен с возможностью обнаружения шума 210 и выработки множества сигналов субполосного шума (например, сигналов S1-Sm субполосного шума) в ответ на обнаруженный шум 210.
Как показано на фиг.6, датчик 220B субполосного шума может включать в себя множество акустоэлектрических преобразователей 610 (например, акустоэлектрические преобразователи 610-1 – 610-m) и множество модулей 620 дискретизации (например, модули 620-1 – 620-m дискретизации). Каждый из акустоэлектрических преобразователей 610 может иметь уникальную частотную характеристику и может быть выполнен с возможностью выработки электрического сигнала субполосного шума путем обработки шума 210. Электрические сигналы субполосного шума, вырабатываемые акустоэлектрическими преобразователями 610, могут быть аналоговыми сигналами. Каждый из модулей 620 дискретизации может быть выполнен с возможностью приема одного из электрических сигналов субполосного шума и дискретизации принятого электрического сигнала субполосного шума для выработки одного сигнала субполосного шума из сигналов субполосного шума (то есть цифрового сигнала).
В некоторых вариантах осуществления количество (или число) акустоэлектрических преобразователей 610 и количество (или число) модулей 620 дискретизации могут равняться количеству (или числу) сигналов субполосного шума (то есть m). Значение m может быть связано с полосой частот шума 210 и полосами частот вырабатываемых сигналов субполосного шума. Например, определенное количество акустоэлектрических преобразователей 610 может быть не использовано, так что объединение полос частот сигналов субполосного шума может перекрывать полосу частот шума 210. Дополнительно или альтернативно, можно избежать перекрытия между полосами частот пары соседних сигналов субполосного шума среди сигналов субполосного шума.
В некоторых вариантах осуществления акустоэлектрический преобразователь 610 может включать в себя компонент акустического канала и звукочувствительный компонент. Компонент акустического канала может формировать путь, по которому аудиосигнал (например, шум 210) передается в звукочувствительный компонент. Например, компонент акустического канала может включать в себя одну или несколько камерных конструкций, одну или несколько трубчатых конструкций и т.п. или их сочетание. Звукочувствительный компонент может преобразовывать аудиосигнал, передаваемый из компонента акустического канала (например, исходный шум 210 или обработанный шум после прохождения через компонент акустического канала), в электрический сигнал. Например, звукочувствительный компонент 420 может включать в себя диафрагму, пластину, кантилевер и т.д. Если взять схему в качестве примера, диафрагма может использоваться для преобразования изменения звукового давления, вызванного аудиосигналом на поверхности диафрагмы, в механическую вибрацию диафрагмы. Звукочувствительный компонент может быть изготовлен из одного или нескольких материалов, включая, например, пластик, металл, пьезоэлектрический материал и т.п. или любой композитный материал.
В некоторых вариантах осуществления частотная характеристика акустоэлектрического преобразователя 610 может быть связана с акустической структурой компонента акустического канала электроакустического преобразователя 610. Например, компонент акустического канала электроакустического преобразователя 610-i может иметь особую акустическую конструкцию, которая позволяет обрабатывать шум 210 до того, как шум 210 достигнет звукочувствительного компонента акустоэлектрического преобразователя 610-i. В некоторых вариантах осуществления акустическая структура компонента акустического канала может иметь определенный акустический импеданс, так что компонент акустического канала может функционировать как фильтр, фильтрующий шум 210 для выработки субполосного шума. Звукочувствительный компонент акустоэлектрического преобразователя 610-i может затем преобразовывать субполосный шум в электрический сигнал Ei субполосного шума.
В некоторых вариантах осуществления акустический импеданс акустической конструкции может быть установлен в соответствии с полосой частот шума 210. В некоторых вариантах осуществления акустическая конструкция, в основном включающая в себя камерную структуру, может функционировать как фильтр верхних частот, в то время как акустическая конструкция, в основном включающая в себя трубчатую структуру, может функционировать как фильтр нижних частот. Только в качестве примера, компонент акустического канала может иметь конструкцию камеры в виде трубы. Конструкция «камера-труба» может представлять собой последовательное сочетание звуковой объема и акустической массы, и может быть образован резонансный контур индуктор-конденсатор (LC). Если в конструкции камеры-трубы используется материал с акустическим сопротивлением, может быть образован последовательный контур резистор-индуктор-конденсатор (RLC), и акустический импеданс последовательного контура RLC может быть определен в соответствии с уравнением (1), как показано ниже:
 , (1)
, (1)
где  относится к акустическому импедансу компонента акустического канала,
относится к акустическому импедансу компонента акустического канала,  относится к угловой частоте конструкции камеры-трубы,
относится к угловой частоте конструкции камеры-трубы,  относится к мнимой единице,
относится к мнимой единице,  относится к акустической массе,
относится к акустической массе,  относится к звуковой мощности,
относится к звуковой мощности,  относится к акустическому сопротивлению последовательного контура RLC.
относится к акустическому сопротивлению последовательного контура RLC.
Конструкция камеры-трубы может функционировать как полосовой фильтр (обозначенный как F1). Ширина полосы пропускания полосового фильтра F1 может регулироваться путем регулировки акустического сопротивления  . Центральную частоту
. Центральную частоту  полосового фильтра F1 можно регулировать путем регулировки акустической массы и/или звуковой мощности
полосового фильтра F1 можно регулировать путем регулировки акустической массы и/или звуковой мощности  . Например, центральная частота полосового фильтра F1 может быть определена в соответствии с уравнением (2), как показано ниже:
. Например, центральная частота полосового фильтра F1 может быть определена в соответствии с уравнением (2), как показано ниже:
 . (2)
. (2)
В некоторых вариантах осуществления частотная характеристика акустоэлектрического преобразователя 610 может ассоциироваться с физической характеристикой (например, материалом, конструкцией) звукочувствительного компонента электроакустического преобразователя 610. Звукочувствительный компонент обладающий специфической физической характеристикой, может быть чувствительным к определенной полосе частот шума 210. Например, механическая вибрация одного или нескольких элементов в звукочувствительном компоненте может привести к изменению (изменениям) электрического параметра (параметров) звукочувствительного компонента. Звукочувствительный компонент может быть чувствительным к определенной полосе частот аудиосигнала. Полоса частот аудиосигнала может вызывать соответствующие изменения электрических параметров звукочувствительного компонента. Другими словами, схема может функционировать как фильтр, который обрабатывает субполосу аудиосигнала. В некоторых вариантах осуществления шум 210 может передаваться на звукочувствительный компонент через компонент акустического канала без (или по существу без) фильтрации компонентом акустического канала. Физическая характеристика звукочувствительного компонента может быть отрегулирована таким образом, чтобы звукочувствительный компонент мог функционировать как фильтр, который фильтрует шум 210 и преобразует отфильтрованный шум в электрический сигнал субполосного шума.
Только в качестве примера, звукочувствительный компонент может включать в себя диафрагму, которая может функционировать как полосовой фильтр (обозначенный F2). Центральная частота  полосового фильтра F2 может быть определена в соответствии с уравнением (3), как показано ниже:
полосового фильтра F2 может быть определена в соответствии с уравнением (3), как показано ниже:
 , (3)
, (3)
где  относится к массе диафрагмы,
относится к массе диафрагмы,  относится к коэффициенту упругости диафрагмы,
относится к коэффициенту упругости диафрагмы,  относится к демпфированию диафрагмы. Ширина полосы пропускания полосового фильтра F2 может регулироваться путем регулировки . Центральную частоту полосового фильтра F2 можно отрегулировать путем регулировки массы диафрагмы и/или коэффициента упругости диафрагмы.
относится к демпфированию диафрагмы. Ширина полосы пропускания полосового фильтра F2 может регулироваться путем регулировки . Центральную частоту полосового фильтра F2 можно отрегулировать путем регулировки массы диафрагмы и/или коэффициента упругости диафрагмы.
Как описано выше, компонент акустического канала или звукочувствительный компонент акустоэлектрического преобразователя 610 может функционировать как фильтр. Частотная характеристика акустоэлектрического преобразователя 610 может регулироваться путем изменения параметра(ов) компонента акустического канала (например,
 и/или
и/или  ) или параметра(ов) звукочувствительного компонента (например,
) или параметра(ов) звукочувствительного компонента (например,  и/или
и/или  ). В некоторых альтернативных вариантах осуществления объединение компонента акустического канала и звукочувствительного компонента может функционировать как фильтр. Путем изменения параметров компонента акустического канала и звукочувствительного компонента можно соответствующим образом отрегулировать частотную характеристику комбинации компонента акустического канала и звукочувствительного компонента. Дополнительное описание, касающееся компонента акустического канала и/или звукочувствительного компонента, который функционирует как полосовой фильтр, можно найти, например, в заявке РСТ № PCT/CN2018/105161, поданной 12 сентября 2018 года под названием «SIGNAL PROCESSING DEVICE HAVING MULTIPLE ACOUSTIC-ELECTRIC TRANSDUCERS», содержание которого включено в данный документ путем ссылки.
). В некоторых альтернативных вариантах осуществления объединение компонента акустического канала и звукочувствительного компонента может функционировать как фильтр. Путем изменения параметров компонента акустического канала и звукочувствительного компонента можно соответствующим образом отрегулировать частотную характеристику комбинации компонента акустического канала и звукочувствительного компонента. Дополнительное описание, касающееся компонента акустического канала и/или звукочувствительного компонента, который функционирует как полосовой фильтр, можно найти, например, в заявке РСТ № PCT/CN2018/105161, поданной 12 сентября 2018 года под названием «SIGNAL PROCESSING DEVICE HAVING MULTIPLE ACOUSTIC-ELECTRIC TRANSDUCERS», содержание которого включено в данный документ путем ссылки.
В некоторых вариантах осуществления акустоэлектрические преобразователи 610 могут иметь определенные частотные характеристики с тем, чтобы полосы частот сигналов субполосного шума, вырабатываемых датчиком 220B субполосного шума, могли перекрывать полосу частот шума 210 и/или можно было избежать перекрытия между полосами частот пары соседних сигналов субполосного шума. С этой целью в некоторых вариантах осуществления частотные характеристики акустоэлектрических преобразователей 610, которые соответствуют паре соседних сигналов субполосного шума, могут иметь такие же или аналогичные характеристики, что и характеристики полосовых фильтров, которые вырабатывают пару соседних сигналов субполосного шума, как описано со ссылкой на фиг.4.
Например, среди акустоэлектрических преобразователей 610 первый акустоэлектрический преобразователь, имеющий первую частотную характеристику, может вырабатывать электрический сигнал субполосного шума, который соответствует первому сигналу субполосного шума субполосного шума. Второй акустоэлектрический преобразователь, имеющий вторую частотную характеристику, может вырабатывать электрический сигнал субполосного шума, который соответствует второму сигналу субполосного шума, соседнему с первым сигналом субполосного шума в частотной области. Первая частотная характеристика и вторая частотная характеристика могут пересекаться в точке частоты, которая находится рядом с точкой половинной мощности первой частотной характеристики и/или точкой половинной мощности второй частотной характеристики. Только в качестве примера, первая частотная характеристика первого акустоэлектрического преобразователя может быть аналогична частотной характеристике 510 первого полосового фильтра, как показано на фиг.5А и 5В. Вторая частотная характеристика второго акустоэлектрического преобразователя может быть аналогична частотной характеристике 520 второго полосового фильтра, как показано на фиг.5A, или частотной характеристике 530 второго полосового фильтра, как показано на фиг.5B.
В некоторых вариантах осуществления акустоэлектрический преобразователь 610 может передавать выработанный электрический сигнал субполосного шума в модуль 620 дискретизации через один или несколько передатчиков. Примерным передатчиком может быть коаксиальный кабель, кабель связи (например, телекоммуникационный кабель), гибкий кабель, спиральный кабель, кабель с неметаллической оболочкой, кабель с металлической оболочкой, многожильный кабель, кабель типа витая пара, ленточный кабель, экранированный кабель, двухжильный кабель, оптическое волокно, и тому подобное или их комбинации. В некоторых вариантах осуществления электрические сигналы субполосного шума могут передаваться в модуль 620 дискретизации через множество передатчиков поддиапазона, соединенных параллельно. Каждый из множества субполосных передатчиков может подключаться к акустоэлектрическому преобразователю 610 и передавать электрический сигнал субполосного шума, вырабатываемый акустоэлектрическим преобразователем 610, в соответствующий модуль 620 дискретизации. Альтернативно, сигналы субполосного шума могут быть преобразованы в одноканальный сигнал с использованием, например, технологию мультиплексирования с частотным разделением каналов и переданы в модули 620 дискретизации через один передатчик.
В некоторых вариантах осуществления модуль 620 дискретизации может выполнять дискретизацию электрического сигнала субполосного шума, используя определенную частоту дискретизации. В некоторых вариантах осуществления частоты дискретизации различных модулей 620 дискретизации могут быть одинаковыми. Например, определенный электрический сигнал субполосного шума может иметь наибольшую центральную частоту среди всех электрических сигналов субполосного шума, и частота дискретизации каждого модуля 620 дискретизации может быть более чем в два раза выше самой высокой частоты в полосе частот определенного электрического сигнала субполосного шума. Это позволяет избежать искажения сигнала и частотного наложения между сигналами субполосного шума, вырабатываемыми модулями 620 дискретизации. Однако использование высокой частоты дискретизации (например, частоты дискретизации выше пороговой частоты) может привести к увеличению вычислительной нагрузки и/или времени.
Альтернативно, частоты дискретизации различных модулей 620 дискретизации могут быть разными в соответствии с полосами частот электрических сигналов субполосного шума, подлежащих дискретизации. Например, частота дискретизации модуля 620-i дискретизации может быть более чем в два раза больше самой высокой частоты в полосе частот электрического сигнала Ei субполосного шума. В некоторых вариантах осуществления модуль 620-i дискретизации может выполнять дискретизацию электрического сигнала Ei субполосного шума в соответствии со способом полосовой дискретизации. Например, частота дискретизации модуля 620-i дискретизации может быть не менее чем в два раза больше ширины полосы частот электрического сигнала Ei субполосного шума и/или не больше чем в четыре раза больше ширины полосы частот электрического сигнала Ei субполосного шума. В качестве другого примера, при условии, что полоса частот электрического сигнала Ei субполосного шума равна ( ), частота
), частота  дискретизации электрического сигнала Ei субполосного шума может быть определена в соответствии с уравнением (4), как показано ниже:
дискретизации электрического сигнала Ei субполосного шума может быть определена в соответствии с уравнением (4), как показано ниже:
 , Уравнение (4)
, Уравнение (4)
где  может быть наибольшим целым числом, которое делает определяемую
может быть наибольшим целым числом, которое делает определяемую  , равной или большей, чем
, равной или большей, чем  . Используя технологию полосовой дискретизации, а не технологию широкополосной дискретизации или технологию дискретизации нижних частот, модуль 620-i дискретизации может выполнять дискретизацию электрического сигнала Ei субполосного шума с относительно низкой частотой дискретизации, тем самым уменьшая сложность и стоимость процесса дискретизации, а также повышая качество дискретизации.
. Используя технологию полосовой дискретизации, а не технологию широкополосной дискретизации или технологию дискретизации нижних частот, модуль 620-i дискретизации может выполнять дискретизацию электрического сигнала Ei субполосного шума с относительно низкой частотой дискретизации, тем самым уменьшая сложность и стоимость процесса дискретизации, а также повышая качество дискретизации.
В некоторых вариантах осуществления сигналы субполосного шума, вырабатываемые модулями 620 дискретизации с разными частотами дискретизации, могут иметь разные периоды дискретизации. Множество модулей субполосного шумоподавления (например, модули 230 субполосного шумоподавления) могут принимать сигналы субполосного шума из датчика 220B субполосного шума и вырабатывать множество сигналов коррекции субполосного шума. Сигналы коррекции субполосного шума могут иметь разные периоды дискретизации. Может потребоваться объединение сигналов коррекции субполосного шума для выработки сигнала коррекции шума согласно некоторым вариантам осуществления настоящего раскрытия, как описано в другом месте в настоящем раскрытии (например, смотри фиг.2 и соответствующее описание). Перед объединением сигналы коррекции субполосного шума могут подвергаться понижающей дискретизации или повышающей дискретизации с тем, чтобы периоды дискретизации сигналов коррекции субполосного шума можно было отрегулировать на одно и то же значение.
Следует отметить, что приведенное выше описание датчика 220B субполосного шума предназначено для иллюстрации, а не для ограничения объема настоящего раскрытия. Специалистам в данной области техники будут очевидны многие альтернативы, модификации и вариации. Признаки, структуры, способы и другие характеристики иллюстративных вариантов осуществления, описанных в данном документе, могут быть объединены различными способами для получения дополнительных и/или альтернативных иллюстративных вариантов осуществления. Например, могут быть опущены один или несколько компонентов датчика 220B субполосного шума, описанного выше. В некоторых вариантах осуществления акустоэлектрические преобразователи 610 могут напрямую вырабатывать сигналы субполосного шума в виде цифровых сигналов путем обработки шума 210, и модули 620 дискретизации могут отсутствовать. Дополнительно или альтернативно, датчик 220B субполосного шума может включать в себя один или несколько дополнительных компонентов.
На фиг.7 показано схематичное представление, иллюстрирующее примерный модуль 700 субполосного шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия. Модуль 700 субполосного шумоподавления может быть примерным вариантом осуществления модуля 230-i субполосного шумоподавления, как описано со ссылкой на фиг.2 и 3. Модуль 700 субполосного шумоподавления может быть выполнен с возможностью приема сигнала субполосного шума. из датчика субполосного шума (например, датчика 220 субполосного шума) и выработки сигнала
из датчика субполосного шума (например, датчика 220 субполосного шума) и выработки сигнала  коррекции субполосного шума для уменьшения сигнала 220 субполосного шума .
коррекции субполосного шума для уменьшения сигнала 220 субполосного шума .  может относиться к коэффициенту затухания амплитуды, относящемуся к шуму (например, шуму 210), который необходимо уменьшить.
может относиться к коэффициенту затухания амплитуды, относящемуся к шуму (например, шуму 210), который необходимо уменьшить.
Как показано на фиг.7, модуль 700 субполосного шумоподавления может включать в себя фазовый модулятор 710 и амплитудный модулятор 720. Фазовый модулятор 710 может быть выполнен с возможностью приема сигнала  субполосного шума и выработки фазомодулированного сигнала
субполосного шума и выработки фазомодулированного сигнала  путем инверсии фазы сигнала субполосного шума. Например, как показано на фиг.8, фазомодулированный сигнал может иметь инвертированную фазу по отношению к сигналу субполосного шума. В некоторых вариантах осуществления смещение фазы (или сдвиг) шума может происходить во время его передачи из местоположения в датчике субполосного шума, который вырабатывает сигнал субполосного шума в местоположение в модуле вывода (например, модуле 170 вывода) или его части (например, блоке вывода). В некоторых вариантах осуществления фазовым сдвигом можно пренебречь. Фазовый модулятор 710 может вырабатывать фазомодулированный сигнал , просто выполняя инверсию фазы сигнала субполосного шума. Звук может передаваться в виде плоской волны в наружном слуховом проходе, если частота звука ниже частоты среза наружного слухового прохода. В иллюстративных целях наружный слуховой проход можно рассматривать как трубчатый канал определенного радиуса, и его граничную частоту можно определить в соответствии с уравнением (5), как показано ниже:
путем инверсии фазы сигнала субполосного шума. Например, как показано на фиг.8, фазомодулированный сигнал может иметь инвертированную фазу по отношению к сигналу субполосного шума. В некоторых вариантах осуществления смещение фазы (или сдвиг) шума может происходить во время его передачи из местоположения в датчике субполосного шума, который вырабатывает сигнал субполосного шума в местоположение в модуле вывода (например, модуле 170 вывода) или его части (например, блоке вывода). В некоторых вариантах осуществления фазовым сдвигом можно пренебречь. Фазовый модулятор 710 может вырабатывать фазомодулированный сигнал , просто выполняя инверсию фазы сигнала субполосного шума. Звук может передаваться в виде плоской волны в наружном слуховом проходе, если частота звука ниже частоты среза наружного слухового прохода. В иллюстративных целях наружный слуховой проход можно рассматривать как трубчатый канал определенного радиуса, и его граничную частоту можно определить в соответствии с уравнением (5), как показано ниже:
 , Уравнение (5)
, Уравнение (5)
где  относится к частоте среза наружного слухового прохода,
относится к частоте среза наружного слухового прохода,  относится к скорости звука,
относится к скорости звука,  относится к радиусу наружного слухового прохода. Например, если скорость
относится к радиусу наружного слухового прохода. Например, если скорость  звука равна 340 метров в секунду, и радиус равен 3,5 миллиметра (мм), частота среза может быть приблизительно равна 28,4 килогерц (кГц). Любой звук с частотой ниже 28,4 кГц может передаваться в виде плоской волны в наружном слуховом проходе. В общем случае длина волны шума может быть намного больше длины наружного слухового прохода (например, 25 мм). Только в качестве примера, длина волны шума с частотой 3 кГц может быть примерно равна 113 мм, что примерно в четыре раза больше длины наружного слухового прохода. Если шум передается в виде плоской волны в одном направлении во время его передачи из местоположения в датчике субполосного шума в местоположение в выходном модуле (или его части), фазовый сдвиг во время передачи может быть маленьким (например, меньше порогового значения), и им можно пренебречь при выработке фазомодулированного сигнала .
звука равна 340 метров в секунду, и радиус равен 3,5 миллиметра (мм), частота среза может быть приблизительно равна 28,4 килогерц (кГц). Любой звук с частотой ниже 28,4 кГц может передаваться в виде плоской волны в наружном слуховом проходе. В общем случае длина волны шума может быть намного больше длины наружного слухового прохода (например, 25 мм). Только в качестве примера, длина волны шума с частотой 3 кГц может быть примерно равна 113 мм, что примерно в четыре раза больше длины наружного слухового прохода. Если шум передается в виде плоской волны в одном направлении во время его передачи из местоположения в датчике субполосного шума в местоположение в выходном модуле (или его части), фазовый сдвиг во время передачи может быть маленьким (например, меньше порогового значения), и им можно пренебречь при выработке фазомодулированного сигнала .
Амплитудный модулятор 720 может быть выполнен с возможностью приема фазомодулированного сигнала  и выработки сигнала коррекции путем модуляции амплитуды фазомодулированного сигнала . В некоторых вариантах осуществления амплитуда шума может ослабляться во время его передачи из местоположения в датчике субполосного шума в местоположение в модуле вывода (или его части). Коэффициент ослабления амплитуды может быть определен для измерения ослабления амплитуды шума во время передачи. Коэффициент ослабления амплитуды может ассоциироваться с одним или несколькими факторами, включая, например, материал и/или конструкцию компонента акустического канала, по которому передается шум, местоположение датчика субполосного шума относительно модуля вывода (или его части) или тому подобное, или любое их сочетание. В некоторых вариантах осуществления коэффициент ослабления амплитуды может представлять собой параметр настройки по умолчанию системы 100A шумоподавления (или 100B) или может быть предварительно определен в ходе реального или смоделированного эксперимента. Только в качестве примера, коэффициент ослабления амплитуды может быть определен путем сравнения амплитуды аудиосигнала вблизи датчика субполосного шума (например, до того, как он поступит в аудиовещательное устройство) и амплитуды аудиосигнала после его передачи в местоположение в модуле вывода. В некоторых альтернативных вариантах осуществления ослабление амплитуды шума можно не учитывать, например, если ослабление амплитуды во время передачи шума меньше порогового значения, и/или коэффициент ослабления амплитуды по существу равен 1. В таких случаях фазомодулированный сигнал может быть обозначен как сигнал коррекции субполосного шума сигнала субполосного шума.
и выработки сигнала коррекции путем модуляции амплитуды фазомодулированного сигнала . В некоторых вариантах осуществления амплитуда шума может ослабляться во время его передачи из местоположения в датчике субполосного шума в местоположение в модуле вывода (или его части). Коэффициент ослабления амплитуды может быть определен для измерения ослабления амплитуды шума во время передачи. Коэффициент ослабления амплитуды может ассоциироваться с одним или несколькими факторами, включая, например, материал и/или конструкцию компонента акустического канала, по которому передается шум, местоположение датчика субполосного шума относительно модуля вывода (или его части) или тому подобное, или любое их сочетание. В некоторых вариантах осуществления коэффициент ослабления амплитуды может представлять собой параметр настройки по умолчанию системы 100A шумоподавления (или 100B) или может быть предварительно определен в ходе реального или смоделированного эксперимента. Только в качестве примера, коэффициент ослабления амплитуды может быть определен путем сравнения амплитуды аудиосигнала вблизи датчика субполосного шума (например, до того, как он поступит в аудиовещательное устройство) и амплитуды аудиосигнала после его передачи в местоположение в модуле вывода. В некоторых альтернативных вариантах осуществления ослабление амплитуды шума можно не учитывать, например, если ослабление амплитуды во время передачи шума меньше порогового значения, и/или коэффициент ослабления амплитуды по существу равен 1. В таких случаях фазомодулированный сигнал может быть обозначен как сигнал коррекции субполосного шума сигнала субполосного шума.
В некоторых вариантах осуществления устройство шумоподавления (например, устройство 200 шумоподавления, устройство 300 шумоподавления) может включать в себя множество модулей 230 субполосного шумоподавления. Каждый из модулей 230 субполосного шумоподавления может иметь ту же конструкцию, что и модуль 700 субполосного шумоподавления, как показано на фиг.7, и может быть выполнен с возможностью выработки соответствующего сигнала коррекции субполосного шума. Множество сигналов коррекции субполосного шума может быть объединено в один сигнал коррекции шума  в соответствии с уравнением (6), как показано ниже:
в соответствии с уравнением (6), как показано ниже:
 . Уравнение (6)
. Уравнение (6)
На фиг.9 показано схематичное представление, иллюстрирующее примерный модуль 900 субполосного шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия. Модуль 900 субполосного шумоподавления может быть примерным вариантом осуществления модуля 230-i субполосного шумоподавления, как описано со ссылкой на фиг.2 и 3. Модуль 900 субполосного шумоподавления может быть аналогичен модулю 700 субполосного шумоподавления, за исключением того, что фазовый модулятор 710 модуля 900 субполосного шумоподавления может быть выполнен с возможностью модуляции фазы сигнала субполосного шума, принимая во внимание сдвиг фазы сигнала субполосного шума во время передачи сигнала.
Только в качестве примера, фаза сигнала субполосного шума может иметь фазовый сдвиг  во время его передачи из местоположения в датчике субполосного шума (например, датчике 220 субполосного шума) в местоположение в модуле вывода (например, модуле 170 вывода) или его части (например, в блоке вывода). Фазовый сдвиг можно определить в соответствии с уравнением (7), как показано ниже:
во время его передачи из местоположения в датчике субполосного шума (например, датчике 220 субполосного шума) в местоположение в модуле вывода (например, модуле 170 вывода) или его части (например, в блоке вывода). Фазовый сдвиг можно определить в соответствии с уравнением (7), как показано ниже:
 , Уравнение (7)
, Уравнение (7)
где  может относиться к центральной частоте сигнала субполосного шума, и
может относиться к центральной частоте сигнала субполосного шума, и  может относиться к скорости распространения звука. Взяв в качестве примера устройство 200 шумоподавления, шум 210, подлежащий уменьшению, может быть получен из источника звука. Если шум 210 является сигналом ближнего поля,
может относиться к скорости распространения звука. Взяв в качестве примера устройство 200 шумоподавления, шум 210, подлежащий уменьшению, может быть получен из источника звука. Если шум 210 является сигналом ближнего поля,  может относиться к разности между расстоянием от источника звука до датчика 220 субполосного шума и расстоянием от источника звука до модуля 170 вывода (или его блока вывода). Если шум 210 является сигналом дальнего поля, может быть равен
может относиться к разности между расстоянием от источника звука до датчика 220 субполосного шума и расстоянием от источника звука до модуля 170 вывода (или его блока вывода). Если шум 210 является сигналом дальнего поля, может быть равен  , где
, где  может относиться к расстоянию между датчиком 220 субполосного шума и модулем 170 вывода (или его блоком вывода), и
может относиться к расстоянию между датчиком 220 субполосного шума и модулем 170 вывода (или его блоком вывода), и  относится к углу между акустическим источником и датчиком 220 субполосного шума или модулем 170 вывода (или его устройство вывода). Согласно уравнению (6), фазовый сдвиг может увеличиваться с увеличением и с увеличением .
относится к углу между акустическим источником и датчиком 220 субполосного шума или модулем 170 вывода (или его устройство вывода). Согласно уравнению (6), фазовый сдвиг может увеличиваться с увеличением и с увеличением .
Для того, чтобы компенсировать фазовый сдвиг , фазовый модулятор 710 может выполнять инверсию фазы, а также фазовую компенсацию сигнала субполосного шума для выработки фазомодулированного сигнала. В некоторых вариантах осуществления фазовый модулятор 710 может включать в себя всепропускающий фильтр. Функция всепропускающего фильтра может быть обозначена как  , где
, где  относится к угловой частоте. В идеальной ситуации амплитудная характеристика
относится к угловой частоте. В идеальной ситуации амплитудная характеристика  | всепропускающего фильтра может быть равна 1, и фазовая характеристика всепропускающего фильтра может быть равна фазовому сдвигу . Всепропускающий фильтр может задерживать сигнал субполосного шума с временной задержкой
| всепропускающего фильтра может быть равна 1, и фазовая характеристика всепропускающего фильтра может быть равна фазовому сдвигу . Всепропускающий фильтр может задерживать сигнал субполосного шума с временной задержкой  для выполнения фазовой компенсации, можно определить в соответствии с уравнением (8), как показано ниже:
для выполнения фазовой компенсации, можно определить в соответствии с уравнением (8), как показано ниже:
 . Уравнение (8)
. Уравнение (8)
В таких случаях фазовый модулятор 710 может выполнять инверсию фазы и фазовую компенсацию сигнала субполосного шума для выработки фазомодулированного сигнала  , как показано на фиг.9. Амплитудный модулятор 720 может дополнительно модулировать амплитуду фазомодулированного сигнала на основе коэффициента
, как показано на фиг.9. Амплитудный модулятор 720 может дополнительно модулировать амплитуду фазомодулированного сигнала на основе коэффициента  ослабления амплитуды, как описано на фиг.7, чтобы выработать сигнал коррекции субполосного шума (то есть
ослабления амплитуды, как описано на фиг.7, чтобы выработать сигнал коррекции субполосного шума (то есть  ) для уменьшения сигнала 10 субполосного шума .
) для уменьшения сигнала 10 субполосного шума .
В некоторых вариантах осуществления устройство шумоподавления может включать в себя множество модулей 230 субполосного шумоподавления. Каждый из модулей 230 субполосного шумоподавления может иметь такую же или аналогичную конструкцию, что и модуль 900 субполосного шумоподавления, как показано на фиг.9, и может быть выполнен с возможностью выработки соответствующего сигнала коррекции субполосного шума. Множество сигналов коррекции субполосного шума может быть объединено в один сигнал  коррекции шума в соответствии с уравнением (9), как показано ниже:
коррекции шума в соответствии с уравнением (9), как показано ниже:
 . Уравнение (9)
. Уравнение (9)
Следует отметить, что приведенное выше описание фиг.7 и 9 предназначено для иллюстрации, а не для ограничения объема настоящего раскрытия. Специалистам в данной области техники будут очевидны многие альтернативы, модификации и вариации. Признаки, структуры, способы и другие характеристики иллюстративных вариантов осуществления, описанных в данном документе, могут быть объединены различными способами для получения дополнительных и/или альтернативных иллюстративных вариантов осуществления. Например, модули 700 и/или 900 субполосного шумоподавления могут включать в себя один или несколько дополнительных компонентов. Дополнительно или альтернативно, могут быть опущены один или несколько компонентов модулей 700 и/или 900 субполосного шумоподавления, таких как модулятор амплитуды 702, описанный выше.
В некоторых альтернативных вариантах осуществления сигналы субполосного шума могут передаваться в амплитудный модулятор 720 для амплитудной модуляции, и затем передаваться в фазовый модулятор 710 для фазовой модуляции. Например, амплитудный модулятор 720 может выработать амплитудно-модулированный сигнал на основе коэффициента и ослабления амплитуды и выработать соответствующий сигнал коррекции субполосного шума путем выполнения фазовой модуляции (например, инверсии фазы и при необходимости фазовую компенсации) над амплитудно-модулированным сигналом.
На фиг.10 показано схематичное представление, иллюстрирующее примерный датчик 220C субполосного шума согласно некоторым вариантам осуществления настоящего раскрытия. Датчик 220C субполосного шума может быть примерным вариантом датчика 220A субполосного шума, как описано со ссылкой на фиг.4. Модули субполосного шумоподавления (например, модули 230 субполосного шумоподавления) могут быть интегрированы в датчик 220С субполосного шума с тем, чтобы датчик 220С субполосного шума мог выполнять функции как датчика 220А субполосного шума, так и модулей субполосного подавления. Другими словами, датчик 220C субполосного шума может быть выполнен с возможностью обнаружения шума 210 для выработки множества сигналов субполосного шума и множества сигналов коррекции субполосного шума для коррекции сигналов субполосного шума.
Как показано на фиг.10, датчик 220C субполосного шума может включать в себя акустико-электрический преобразователь 410 и модуль 1010 разделения полосы частот. Аналогично модулю 420 разделения полосы частот, описанному со ссылкой на фиг. 4, модуль 1010 разделения полосы частот может включать в себя множество полосовых фильтров, каждый из которых может выполнять полосовую фильтрацию электрического сигнала, вырабатываемого акустико-электрическим преобразователем 410, для выработки множества сигналов субполосного шума. Каждый полосовой фильтр может дополнительно включать в себя процессор цифровых сигналов, который может реализовывать функцию модуля субполосного шумоподавления (например, модуля 700 или 900 субполосного шумоподавления, как описано со ссылкой на фиг.7 и 9). Только в качестве примера, процессор цифровых сигналов может выполнять фазовую модуляцию и/или амплитудную модуляцию сигнала субполосного шума для выработки соответствующего сигнала коррекции субполосного шума. Таким образом, модули субполосного шумоподавления могут быть исключены из устройства шумоподавления, что позволяет упростить конструкцию устройства шумоподавления.
Следует отметить, что приведенное выше описание датчика 220C субполосного шума предназначено для иллюстрации, а не для ограничения объема настоящего раскрытия. Специалистам в данной области техники будут очевидны многие альтернативы, модификации и вариации. Признаки, структуры, способы и другие характеристики иллюстративных вариантов осуществления, описанных в данном документе, могут быть объединены различными способами для получения дополнительных и/или альтернативных иллюстративных вариантов осуществления. Например, датчик 220C субполосного шума может включать в себя один или несколько дополнительных компонентов. Дополнительно или альтернативно, могут быть исключены один или несколько компонентов датчика 220C субполосного шума, описанного выше. В некоторых вариантах осуществления модуль 1010 разделения полосы может вырабатывать сигнал коррекции субполосного шума без выполнения амплитудной модуляции.
На фиг.11 показано схематичное представление, иллюстрирующее примерную систему 1100 шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия. Система 1100 шумоподавления может быть примерным вариантом осуществления системы 100А шумоподавления, как описано со ссылкой на фиг.1А. Как показано на фиг.11, система 1100 шумоподавления может включать в себя устройство 120А для уменьшения шума окружающей среды, устройство 150А для уменьшения остаточного шума, объединенный модуль 1120 и модуль 170 вывода. Устройство 120А для уменьшения шума окружающей среды и устройство 150А для уменьшения остаточного шума могут представлять собой примерные варианты осуществления устройства 120 для уменьшения шума окружающей среды и устройства 150 для уменьшения остаточного шума, соответственно.
Устройство 120A для уменьшения шума окружающей среды может быть выполнено с возможностью уменьшения шума 110 окружающей среды с использованием способа субполосного шумоподавления. Как показано на фиг.11, устройство 120A для уменьшения шума окружающей среды может иметь структуру, аналогичную устройству 200 шумоподавления, как описано со ссылкой на фиг.2. Устройство 120A для уменьшения шума окружающей среды может включать в себя датчик 220 субполосного шума, множество модулей 230 подавления субполосного шума и объединенный модуль 240. Датчик 220 субполосного шума может обнаруживать шум 110 окружающей среды и вырабатывать множество сигналов субполосного шума окружающей среды (например, сигналов A1-Am субполосного шума окружающей среды). Сигнал субполосного шума окружающей среды, вырабатываемый в ответ на шум 110 окружающей среды, может быть аналогичен сигналу субполосного шума, вырабатываемому в ответ на шум 210, как описано со ссылкой на фиг.2.
Модули 230 субполосного шумоподавления могут вырабатывать множество сигналов коррекции субполосного шума окружающей среды (например, сигналов A1'-Am' коррекции субполосного шума окружающей среды), каждый из которых используется для уменьшения одного из сигналов субполосного шума окружающей среды. Сигнал коррекции субполосного шума окружающей среды для уменьшения сигнала субполосного шума окружающей среды может быть аналогичен сигналу коррекции субполосного шума для уменьшения сигнала субполосного шума, как описано со ссылкой на фиг.2. Модуль 240 объединения может объединять сигналы коррекции субполосного шума окружающей среды для выработки сигнала 130 коррекции шума окружающей среды и передачи сигнала 130 коррекции шума окружающей среды в модуль 1120 объединения.
Устройство 150A для уменьшения остаточного шума может быть выполнено с возможностью уменьшения остаточного шума 140 с использованием технологии полнополосного шумоподавления. Устройство 150A для уменьшения остаточного шума может включать в себя датчик 1130 остаточного шума и модуль 1110 для уменьшения остаточного шума. Датчик 1130 остаточного шума может быть выполнен с возможностью обнаружения остаточного шума 140 и выработки сигнала остаточного шума в ответ на обнаруженный остаточный шум 140. Например, датчик 1130 остаточного шума может включать в себя один акустоэлектрический преобразователь, который вырабатывает сигнал остаточного шума, имеющий такую ж (или практически такую же) полосу частот, что и остаточный шум 140. В некоторых вариантах осуществления датчик 1130 остаточного шума может быть установлен рядом с модулем 170 вывода или внутри него. Например, датчик 1130 остаточного шума может быть установлен в модуле 170 вывода рядом с акустическим каналом, из которого вырабатывается аудиосигнал для уменьшения шума 110 окружающей среды. Модуль 1110 подавления остаточного шума может быть выполнен с возможностью приема сигнала остаточного шума из датчика 1130 остаточного шума и выработки сигнала 160 коррекции остаточного шума для уменьшения остаточного шума 140. Сигнал 160 коррекции остаточного шума может передаваться из модуля 1110 уменьшения остаточного шума в модуль 1120 объединения.
В некоторых альтернативных вариантах осуществления устройство 150A для уменьшения остаточного шума может использовать технологию уменьшения остаточного шума для уменьшения остаточного шума 140. Только в качестве примера, устройство 150A для уменьшения остаточного шума может иметь конструкцию, аналогичную устройству 200 для уменьшения остаточного шума, как описано со ссылкой на фиг.2. Датчик 1130 остаточного шума и модуль 1110 уменьшения остаточного шума могут иметь функции, аналогичные функциям датчика 220 субполосного шума и модулей 230 уменьшения субполосного шума, соответственно. Сигнал остаточного шума, вырабатываемый датчиком 1130 остаточного шума, может включать в себя множество сигналов остаточного субполосного шума, каждый из которых может иметь более узкую полосу частот, чем остаточный шум 140. Сигнал 160 коррекции остаточного шума, вырабатываемый модулем 1110 уменьшения остаточного шума, может включать в себя множество сигналов коррекции остаточного субполосного шума для уменьшения сигналов остаточного субполосного шума или представлять собой объединенный сигнал сигналов коррекции остаточного субполосного шума.
Модуль 1120 объединения может быть выполнен с возможностью объединения сигнала 130 коррекции шума окружающей среды и сигнала 160 коррекции остаточного шума для выработки объединенного сигнала, который может быть передан в модуль 170 вывода для вывода. В некоторых вариантах осуществления объединенный сигнал, вырабатываемый модулем 1120 объединения, может быть цифровым сигналом, и модуль 170 вывода может преобразовывать объединенный сигнал в аудиосигнал для вывода.
На фиг.12 показано схематичное представление, иллюстрирующее примерную систему 1200 шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия. Система 1200 шумоподавления может быть примерным вариантом осуществления системы 100В шумоподавления, как описано со ссылкой на фиг.1B. Система 1200 шумоподавления может быть аналогична системе 1100 шумоподавления, описанной со ссылкой на фиг.11, за исключением некоторых компонентов или функций. По сравнению с системой 1100 шумоподавления система 1200 шумоподавления может дополнительно включать в себя цифро-аналоговый преобразователь 1210, цифро-аналоговый преобразователь 1230 и модуль 180 вывода. Сигнал 130 коррекции шума окружающей среды, вырабатываемый устройством 120А для уменьшения шума окружающей среды и сигнал 160 коррекции остаточного шума, вырабатываемый устройством 150A для уменьшения остаточного шума, может быть обработан и выведен, соответственно, без объединения.
В некоторых вариантах осуществления сигнал 130 коррекции шума окружающей среды и сигнал 160 коррекции остаточного шума могут быть цифровыми сигналами. Цифро-аналоговые преобразователи 1210 и 1230 могут быть выполнены с возможностью преобразования сигнала 130 коррекции шума окружающей среды и сигнала 160 коррекции остаточного шума в аналоговые сигналы 1220 и 1240, соответственно. Аналоговый сигнал 1220 может дополнительно передаваться из цифро-аналогового преобразователя 1210 в модуль 170 вывода для вывода. Аналоговый сигнал 1240 может дополнительно передаваться из цифро-аналогового преобразователя 1230 в модуль 180 вывода для вывода.
На фиг.13 показано схематичное представление, иллюстрирующее примерную систему 1300 шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия. Система 1300 шумоподавления может быть аналогична системе 1100 шумоподавления, описанной со ссылкой на фиг.11, за исключением некоторых компонентов или функций. Как показано на фиг.13, система 1300 шумоподавления может включать в себя устройство 120А для уменьшения шума окружающей среды, устройство 150В для уменьшения остаточного шума и модуль 170 вывода. Сигнал 130 коррекции шума окружающей среды, вырабатываемый устройством 120А для уменьшения шума окружающей среды, может быть выведен модулем 170 вывода.
Устройство 150B для уменьшения остаточного шума может включать в себя датчик 1130 остаточного шума и модуль 1310 обратной связи. Модуль 1310 обратной связи может быть выполнен с возможностью регулировки модулей 230 субполосного подавления в соответствии с остаточным шумом 140 для того, чтобы подавлять остаточный шум 140. Например, блок регулировки может передать команду в один или несколько модулей 230 субполосного шумоподавления, чтобы отрегулировать один или несколько параметров модулей 230 субполосного шумоподавления. Только в качестве примера, как описано в другом месте в настоящем раскрытии (например, смотри фиг.7-9 и ее соответствующее описание), модуль 230 субполосного шумоподавления может включать в себя фазовый модулятор (например, фазовый модулятор 710) и/или амплитудный модулятор (например, амплитудный модулятор 720). Модуль 1310 обратной связи может передать команду в модуль 230 субполосного шумоподавления для регулировки временной задержки (например, ) фазового модулятора и/или коэффициента ослабления амплитуды (например, ) амплитудного модулятора таким образом, чтобы не было или по существу не было остаточного шума после подавления окружающего шума 110 сигналом 130 коррекции окружающего шума. Таким образом, модуль 230 субполосного шумоподавления может осуществлять автоматическую регулировку в соответствии с остаточным шумом 140, что повышает точность и стабильность системы шумоподавления 1300.
Следует отметить, что представленное выше описание приведено только в целях иллюстрации и не предназначено для ограничения объема настоящего раскрытия. Специалисты в данной области техники могут быть сделать многочисленные изменения и модификации в соответствии с идеями настоящего раскрытия. Однако эти вариации и модификации не должны выходят за рамки настоящего раскрытия. Система шумоподавления (например, любая из систем 1100, 1200 и 1300 шумоподавления) может включать в себя один или более дополнительных компонентов, и/или один или несколько компонентов системы шумоподавления могут быть исключены. Только в качестве примера, цифро-аналоговый преобразователь 1210 может быть исключен из системы 1200 шумоподавления или интегрирован в модуль 170 вывода. Сигналы коррекции шума окружающей среды в полосе частот могут быть переданы в множество блоков вывода модуля 170 вывода для вывода.
На фиг.14 показано схематичное представление, иллюстрирующее примерное устройство 150C для уменьшения остаточного шума согласно некоторым вариантам осуществления настоящего раскрытия. Устройство 150C для уменьшения остаточного шума может быть примерным вариантом осуществления устройства 150 для уменьшения остаточного шума, которое может использоваться для уменьшения остаточного шума 140 с использованием технологии субполосного шумоподавления.
Как показано на фиг.14, устройство 150C для уменьшения остаточного шума может иметь структуру, аналогичную устройству 200 шумоподавления, как описано со ссылкой на фиг.2. Устройство 150C для уменьшения остаточного шума может включать в себя датчик 220 субполосного шума, множество модулей 230 подавления субполосного шума и объединенный модуль 240. Датчик 220 субполосного шума может быть установлен рядом с модулем 170 вывода для обнаружения остаточного шума 140 и выработки множества сигналов остаточного субполосного шума (например, сигналов R1-Rk остаточного субполосного шума). Модули 230 субполосного шумоподавления могут вырабатывать множество сигналов коррекции остаточного субполосного шума (например, сигналов R'1-R'k коррекции остаточного субполосного шума), которые предназначены для уменьшения одного из сигналов субполосного остаточного шума. Модуль 240 объединения может объединять сигналы коррекции остаточного субполосного шума для выработки сигнала 160 коррекции остаточного шума. Сигнал 160 коррекции остаточного шума может быть дополнительно передан в модуль 170 вывода для вывода.
В некоторых вариантах осуществления модуль 230-i субполосного шумоподавления может включать в себя фазовый модулятор (например, фазоинвертор), выполненный с возможностью выполнения инверсии фазы над соответствующим сигналом Ri остаточного субполосного шума. Так как датчик 220 субполосного шума для обнаружения остаточного шума 140 может быть установлен рядом с модулем 170 вывода, модуль 230-i субполосного шумоподавления может вырабатывать соответствующий сигнал коррекции остаточного субполосного шума Ri ' без выполнения фазовой компенсации и/или амплитудной модуляции сигнала Ri остаточного субполосного шума.
На фиг.15 показано схематичное представление, иллюстрирующее примерную систему 1500 шумоподавления согласно некоторым вариантам осуществления настоящего раскрытия. Система 1500 шумоподавления может быть аналогична системе 1100 шумоподавления, описанной со ссылкой на фиг.11, за исключением того, что система 1500 шумоподавления может объединять технологию обработки аналоговых сигналов для уменьшения шумов. Как показано на фиг.15, система 1500 шумоподавления может включать в себя устройство 120B для уменьшения шума окружающей среды, устройство 150D для уменьшения остаточного шума, объединенный модуль 1505 и модуль 170 вывода.
Устройство 120B для уменьшения шума окружающей среды может включать в себя датчик субполосного шума (не показан на фиг.15), множество компонентов 1501 обработки аналогового сигнала (например, компоненты 1501-1 – 1501-m обработки аналогового сигнала) и объединенный модуль 1504. Датчик субполосного шума устройства 120B для уменьшения шума окружающей среды может обнаруживать шум 110 окружающей среды и вырабатывать сигналы субполосного шума окружающей среды (например, сигналы N1-Nm субполосного шума окружающей среды). Сигналы субполосного шума окружающей среды, вырабатываемые датчиком субполосного шума устройства 120B для уменьшения шума окружающей среды, могут быть аналоговыми сигналами.
Компоненты 1501 обработки аналогового сигнала могут иметь функцию, аналогичную модулям 230 субполосного шумоподавления устройства 120A для уменьшения шума окружающей среды, как описано со ссылкой на фиг.11. Например, компоненты 1501 обработки аналоговых сигналов могут принимать сигналы субполосного шума окружающей среды и вырабатывать множество сигналов коррекции субполосного шума окружающей среды (например, сигналов N1'-Nm' коррекции субполосного шума окружающей среды). Сигналы коррекции субполосного шума окружающей среды, вырабатываемые компонентами 1501 обработки аналоговых сигналов, могут быть аналоговыми сигналами. Сигналы коррекции субполосного шума окружающей среды могут быть объединены модулем 1504 объединения в сигнал 130' коррекции шума окружающей среды, который может быть аналоговым сигналом для уменьшения шума окружающей среды.
В некоторых вариантах осуществления компонент 1501-i обработки аналогового сигнала может включать в себя один или более первых компонентов аналоговой схемы для выполнения фазовой модуляции сигнала Ni субполосного шума окружающей среды. Фазовая модуляция с помощью одного или нескольких первых компонентов аналоговой схемы может быть выполнена аналогично той, которая выполняется фазовым модулятором (например, фазовым модулятором 710), как описано в другом месте в настоящем раскрытии (например, смотри фиг.7-9 и ее соответствующее описание). Например, один или несколько первых компонентов аналоговой схемы могут включать в себя усилитель (например, инвертирующий усилитель), который используется для выполнения инвертирования фазы сигнала Ni субполосного шума окружающей среды. Дополнительно или альтернативно, один или несколько первых компонентов аналоговой схемы могут включать в себя аналоговую линию задержки (например, линию задержки индукторно-конденсаторной (LC) цепи, активную аналоговую линию задержки), которая используется для выполнения компенсации смещения фазы сигнала Ni субполосного шума окружающей среды.
Устройство 150D для уменьшения остаточного шума может включать в себя датчик 1503 остаточного шума и компонент 1502 обработки аналогового сигнала. Датчик 1503 остаточного шума может обнаруживать остаточный шум 140 и вырабатывать сигнал остаточного шума в виде аналогового сигнала. Компонент 1502 обработки аналоговых сигналов может быть выполнен с возможностью выработки сигнала 160' коррекции остаточного шума, который может быть аналоговым сигналом для уменьшения остаточного шума 140. Модуль 1505 объединения может быть выполнен с возможностью объединения сигнала 130' коррекции шума окружающей среды и сигнала 160' коррекции остаточного шума для выработки объединенного аналогового сигнала. Объединенный аналоговый сигнал может выводиться модулем 170 вывода.
Используя компоненты обработки аналоговых сигналов, система 1500 шумоподавления может уменьшать шум окружающей среды и остаточный шум 140 без модуля дискретизации (например, модулей 620 дискретизации), цифро-аналогового преобразователя (например, цифро-аналоговых преобразователей 1210 и 1230), аналого-цифрового преобразователя и т.п., тем самым упрощая систему 1500 шумоподавления и повышая скорость функционирования системы 1500 шумоподавления.
Таким образом, после описания основных концепций специалистам в данной области техники после прочтения этого подробного раскрытия будет очевидно, что предыдущее подробное раскрытие предназначено для представления только в качестве примера и не является ограничивающим. Возможны различные изменения, улучшения и модификации, предназначенные для специалистов в данной области техники, хотя это прямо не указано в данном документе. Предполагается, что эти изменения, улучшения и модификации предложены в настоящем раскрытии и находятся в пределах сущности и объема примерных вариантов осуществления настоящего раскрытия.
Более того, для описания вариантов осуществления настоящего раскрытия использовалась определенная терминология. Например, термины «один вариант осуществления», «вариант осуществления» и/или «некоторые варианты осуществления» означают, что конкретный признак, структура или характеристика, описанные в связи с вариантом осуществления, включены по меньшей мере в один вариант осуществления настоящего раскрытия. Таким образом, следует подчеркнуть, что две или более ссылок на «вариант осуществления», или «один вариант осуществления», или «альтернативный вариант осуществления» в различных частях настоящего описания не обязательно полностью относятся к одному и тому же варианту осуществления. Кроме того, конкретные признаки, структуры или характеристики могут быть объединены в соответствии с одним или несколькими вариантами осуществления настоящего раскрытия.
Кроме того, специалисту в данной области техники будет понятно, что аспекты настоящего раскрытия могут быть проиллюстрированы и описаны в данном документе в любом из ряда патентоспособных классов или контекстов, включая любой новый и полезный процесс, машину, изготовление или состав вещества или любое новое и полезное их улучшение. Соответственно, аспекты настоящего раскрытия могут быть реализованы полностью с помощью аппаратных средств, полностью с помощью программных средств (включая встроенное программно-аппаратные средства, резидентное программное обеспечение, микрокод и т.д.) или сочетать в себе программную и аппаратную реализацию, которые в целом могут упоминаться в данном документе как «блок», «модуль» или «система». Кроме того, аспекты настоящего раскрытия могут принимать форму компьютерного программного продукта, воплощенного на одном или нескольких машиночитаемых носителях информации, имеющих компьютерно- читаемую программу, воплощенную на них.
Машиночитаемый носитель сигналов может включать в себя распространяющийся сигнал данных с воплощенным в нем машиночитаемым программным кодом, например, в основной полосе частот или как часть несущей волны. Такой распространяющийся сигнал может принимать любую из множества форм, включая электромагнитную, оптическую и т.п. или любое их подходящее сочетание. Машиночитаемый носитель сигналов может быть любым машиночитаемым носителем информации, который не является машиночитаемым носителем информации и который может передавать, распространять или транспортировать программу для использования системой, аппаратным устройством или устройством исполнения инструкций или в связи с ними. Программный код, воплощенный на машиночитаемом носителе сигнала, может быть передан с использованием любого подходящего носителя, включая беспроводную связь, проводную связь, оптоволоконный кабель, РЧ и т.п. или любое подходящее их сочетание.
Код компьютерной программы для выполнения операций для аспектов настоящего раскрытия может быть написан в любом сочетании из одного или нескольких языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Scala, Smalltalk, Eiffel, JADE, Emerald, С++, С#, VB. NET, Python и т.п., традиционные процедурные языки программирования, такие как язык программирования "C", Visual Basic, Fortran 2003, Perl, COBOL 2002, PHP, ABAP, языки динамического программирования, такие как Python, Ruby и Groovy, или другие языки программирования. Программный код может исполняться полностью на компьютере пользователя, частично на компьютере пользователя, как отдельный программный пакет, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем случае удаленный компьютер может быть подключен к компьютеру пользователя через сеть любого типа, включая локальную сеть (LAN) или глобальную сеть (WAN), или подключение может быть выполнено к внешнему компьютеру (например, через Интернет с использованием интернет-провайдера) или в среде облачных вычислений, или предлагается в виде услуги, такой как программное обеспечение как услуга (SaaS).
Кроме того, приведенный порядок элементов или последовательностей обработки или использование цифр, букв или других обозначений, таким образом, не предназначен для ограничения заявленных процессов и способов каким-либо порядком, за исключением того, который может быть указан в формуле изобретения. Хотя в приведенном выше раскрытии на различных примерах обсуждено то, что в настоящее время считается множеством полезных вариантов осуществления раскрытия, следует отметить, что такие детали предназначены исключительно для этой цели и что прилагаемая формула изобретения не ограничивается раскрытыми вариантами осуществления, но, напротив, предназначены для охвата модификаций и компоновок, которые находятся в пределах сущности и объема раскрытых вариантов осуществления. Например, хотя реализация различных компонентов, описанных выше, может быть воплощена в аппаратном устройстве, она также может быть реализована как чисто программное решение, например, установка на существующем сервере или мобильном устройстве.
Аналогичным образом, следует отметить, что в приведенном выше описании вариантов осуществления настоящего раскрытия различные признаки иногда сгруппированы вместе в одном варианте осуществления, фигуре или ее описании, чтобы упорядочить раскрытие и помочь в понимании одного или нескольких из различных вариантов осуществления раскрытия. Однако данный способ раскрытия не следует интерпретировать как отражающий намерение о том, что заявленный предмет требует большего количества признаков, чем прямо указано в каждом пункте формулы изобретения. Скорее, заявленный предмет изобретения может заключаются не во всех признаках одного вышеизложенного раскрытого варианта осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУБПОЛОСНЫЙ АЛГОРИТМ С ПОРОГОВОЙ ВЕЛИЧИНОЙ ДЛЯ УСТОЙЧИВОЙ ШИРОКОПОЛОСНОЙ СИСТЕМЫ АКТИВНОГО ШУМОПОДАВЛЕНИЯ | 2015 |
|
RU2698639C2 |
| СИСТЕМЫ И СПОСОБЫ УСТРАНЕНИЯ ШУМОВ | 2019 |
|
RU2797926C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УЛУЧШЕНИЯ ВОСПРИНИМАЕМОГО КАЧЕСТВА ВОСПРОИЗВЕДЕНИЯ ЗВУКА ПУТЕМ ОБЪЕДИНЕНИЯ АКТИВНОГО ШУМОПОДАВЛЕНИЯ И КОМПЕНСАЦИИ ВОСПРИНИМАЕМОГО ШУМА | 2013 |
|
RU2626987C2 |
| ПОДАВЛЕНИЕ ШУМА С УЛУЧШЕННЫМ ЧАСТОТНЫМ РАЗРЕШЕНИЕМ | 2020 |
|
RU2828604C2 |
| ПОДАВЛЕНИЕ ШУМОВ С ИСПОЛЬЗОВАНИЕМ СЕГМЕНТИРОВАННОГО, ЧАСТОТНО-ЗАВИСИМОГО ФАЗОВОГО ПОДАВЛЕНИЯ | 2018 |
|
RU2837777C2 |
| СПОСОБ КОМПЕНСАЦИИ ПОТЕРИ СЛУХА В ТЕЛЕФОННОЙ СИСТЕМЕ И В МОБИЛЬНОМ ТЕЛЕФОННОМ АППАРАТЕ | 2013 |
|
RU2568281C2 |
| МИКРОФОН | 2021 |
|
RU2800552C1 |
| СИСТЕМА АКТИВНОГО ШУМОПОДАВЛЕНИЯ И ПОДАВЛЕНИЯ ВИБРАЦИИ | 2016 |
|
RU2709700C2 |
| ШУМОПОДАВЛЕНИЕ НА ОСНОВЕ ПРОГНОЗИРОВАНИЯ В СТЕРЕОФОНИЧЕСКОМ РАДИОСИГНАЛЕ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2012 |
|
RU2576467C2 |
| СПОСОБ И УСТРОЙСТВО ОСЛАБЛЕНИЯ ШУМА В РЕЧЕВОМ СИГНАЛЕ | 1996 |
|
RU2121719C1 |
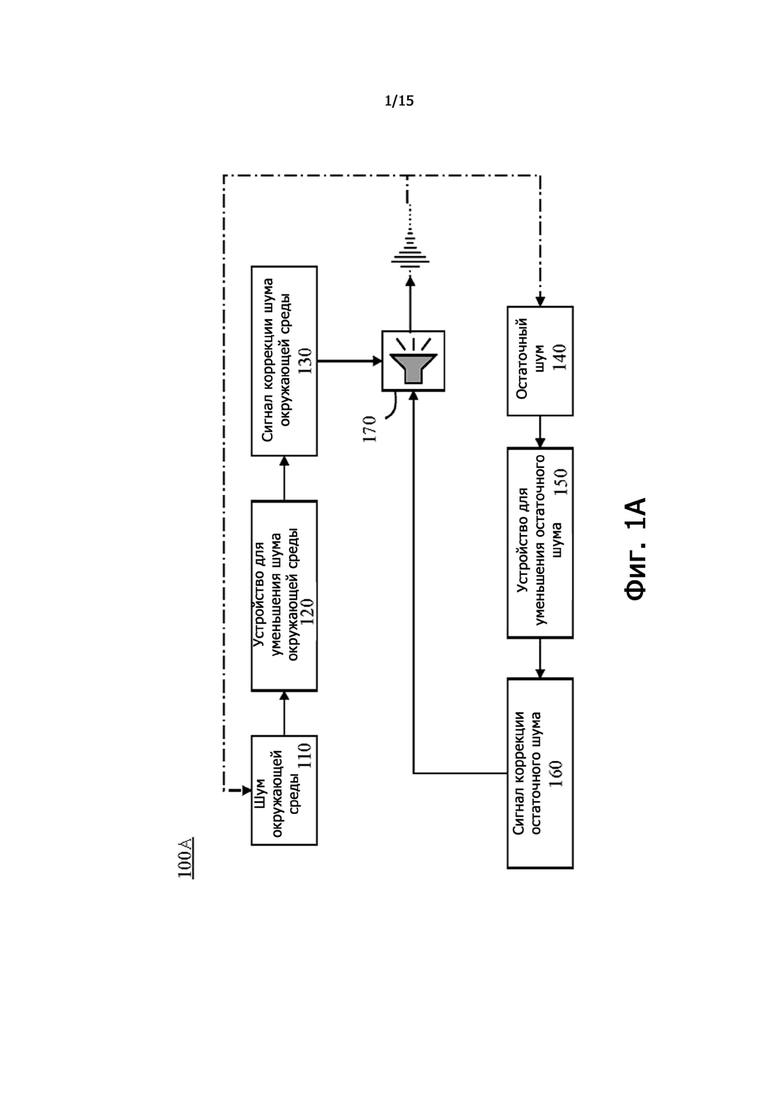
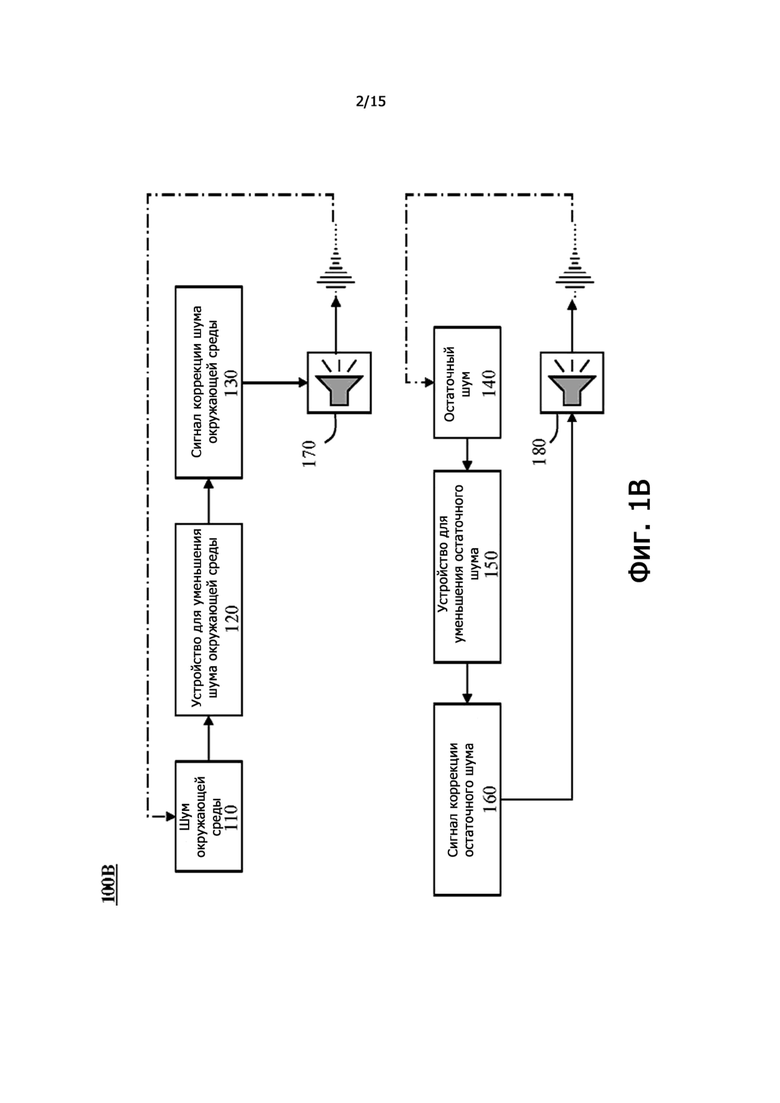
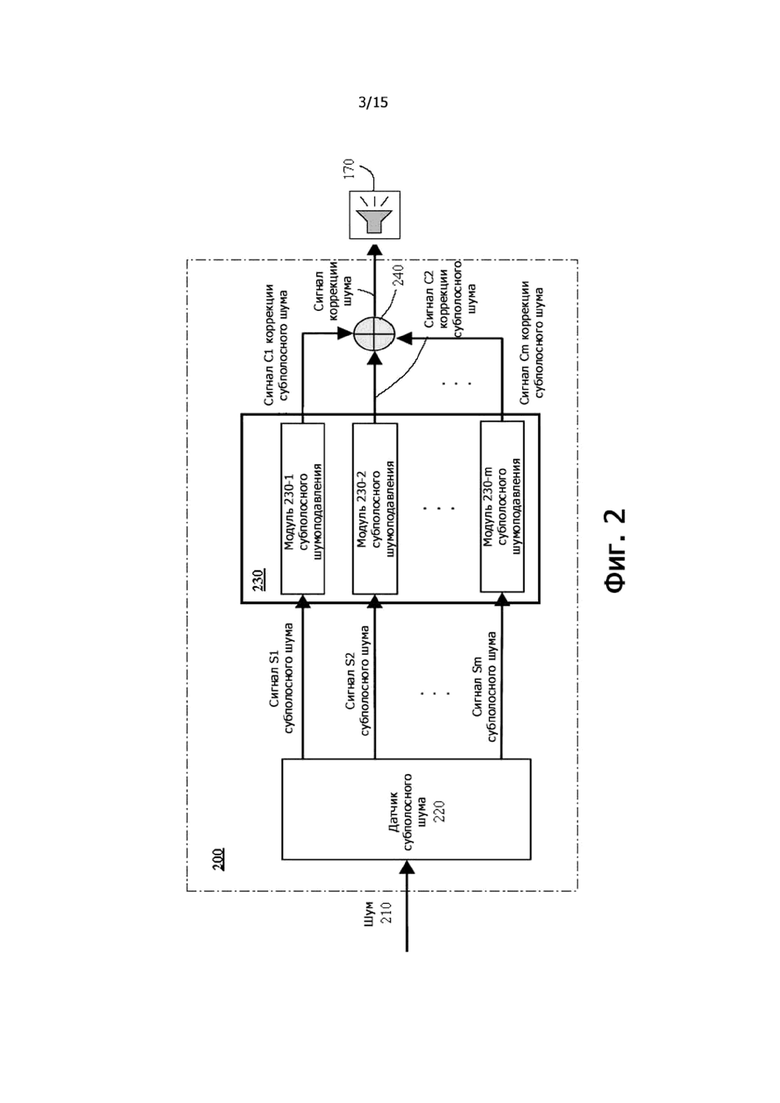
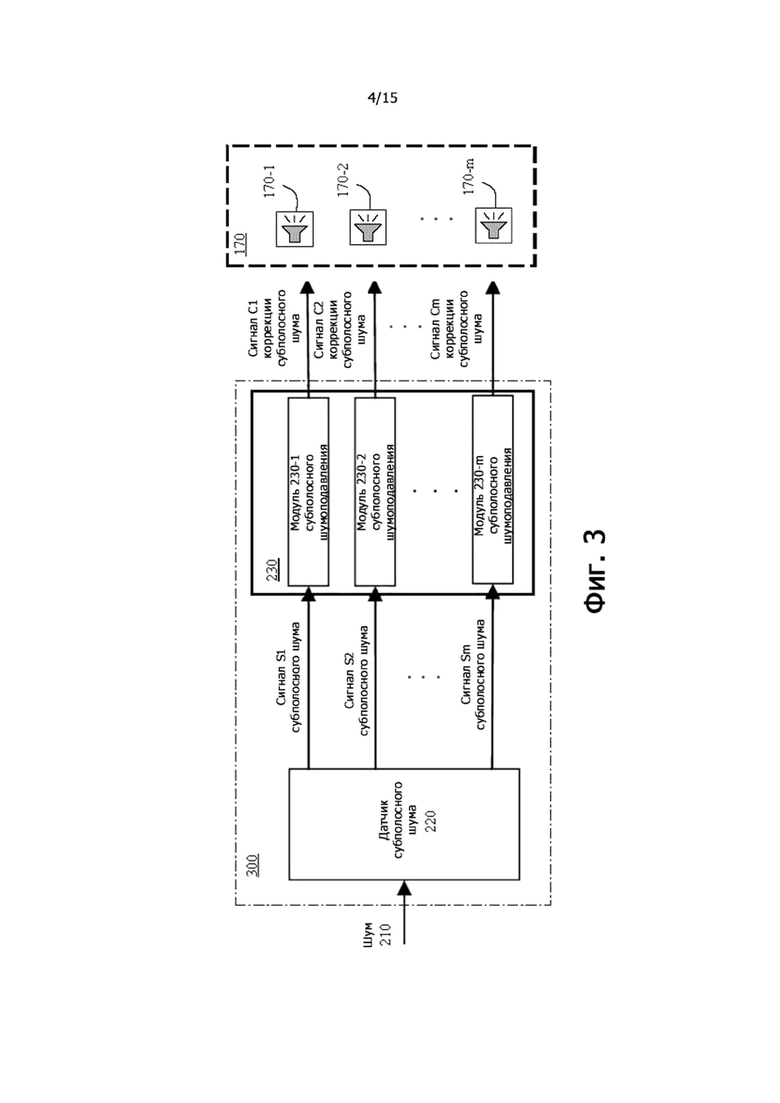
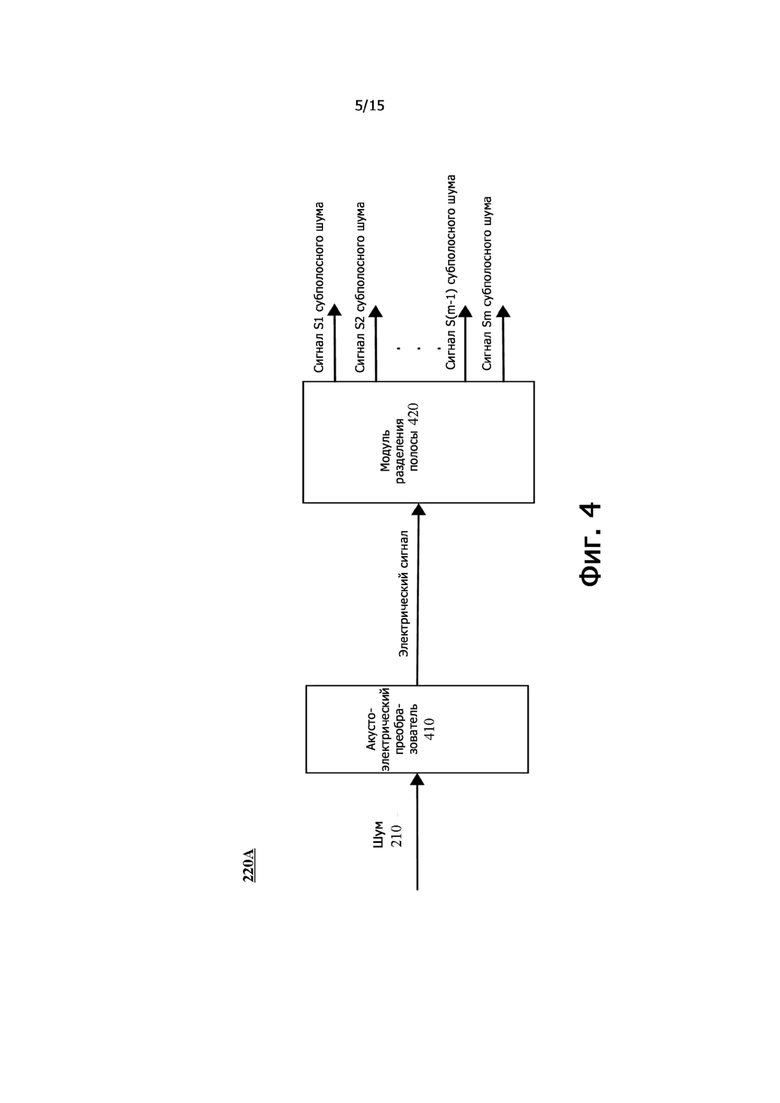
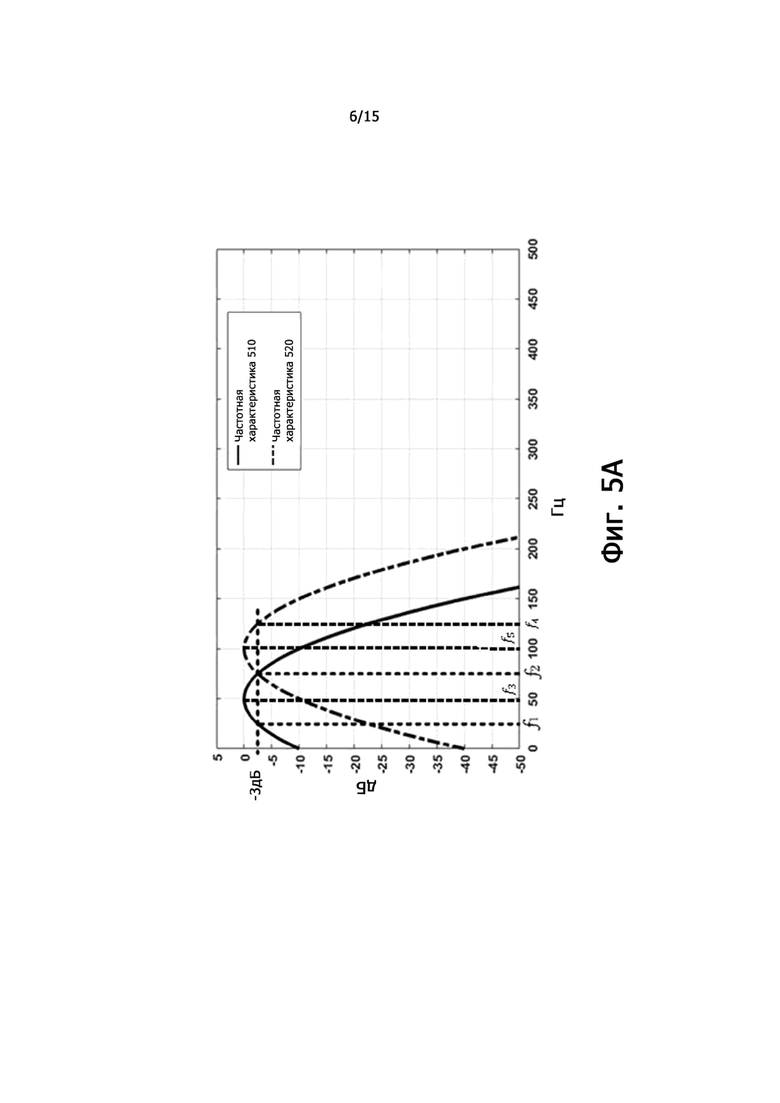
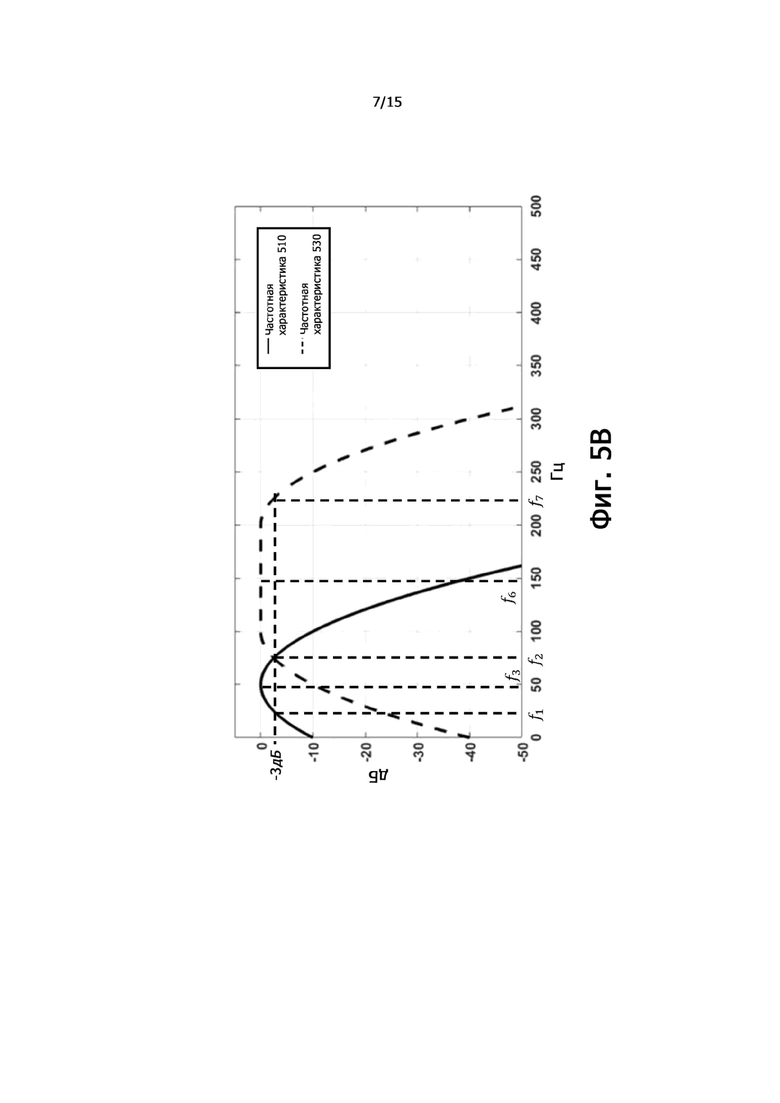
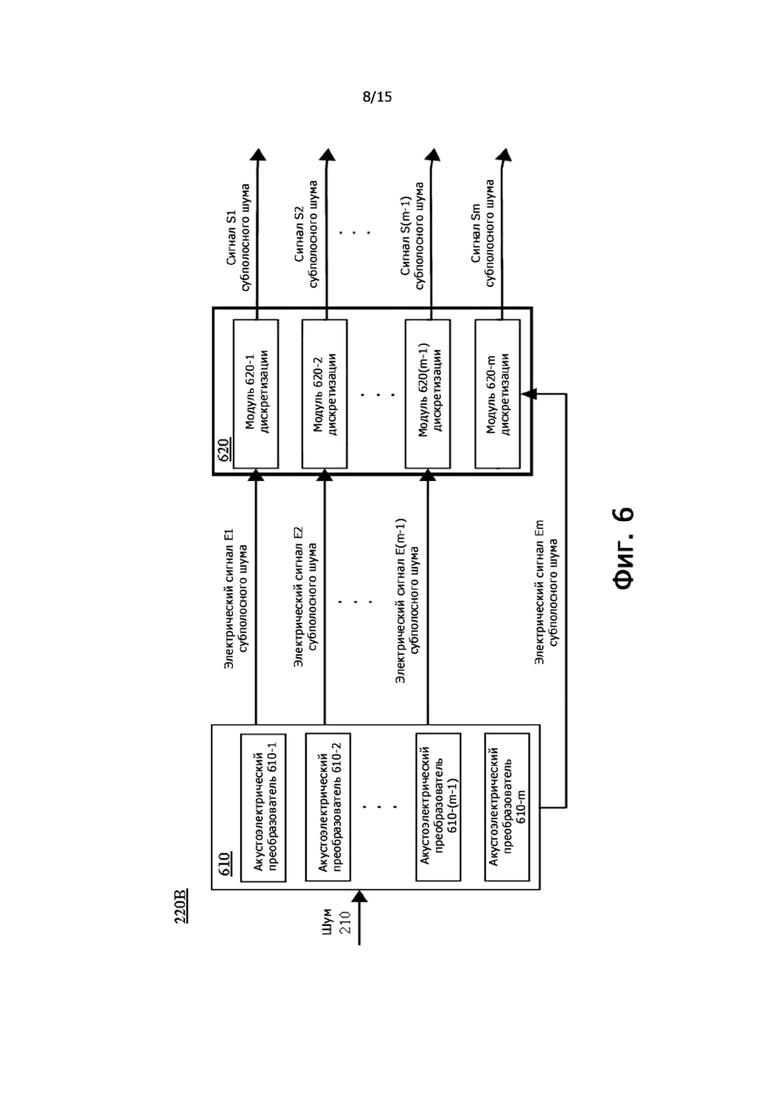
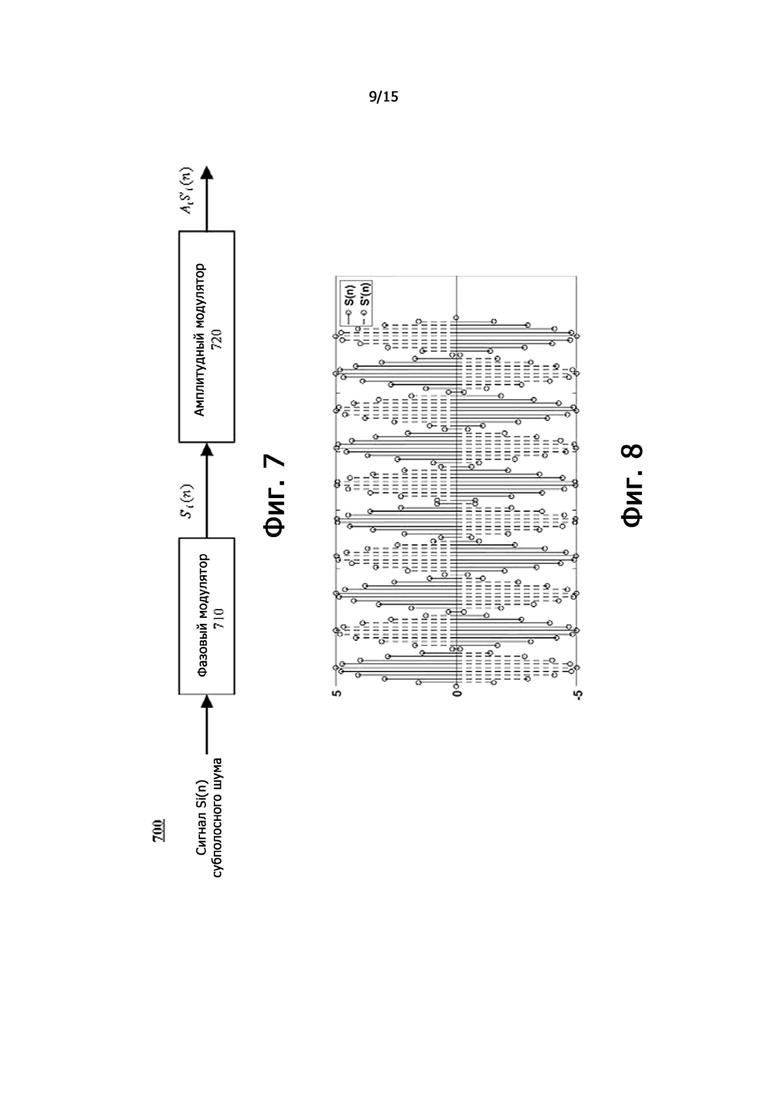
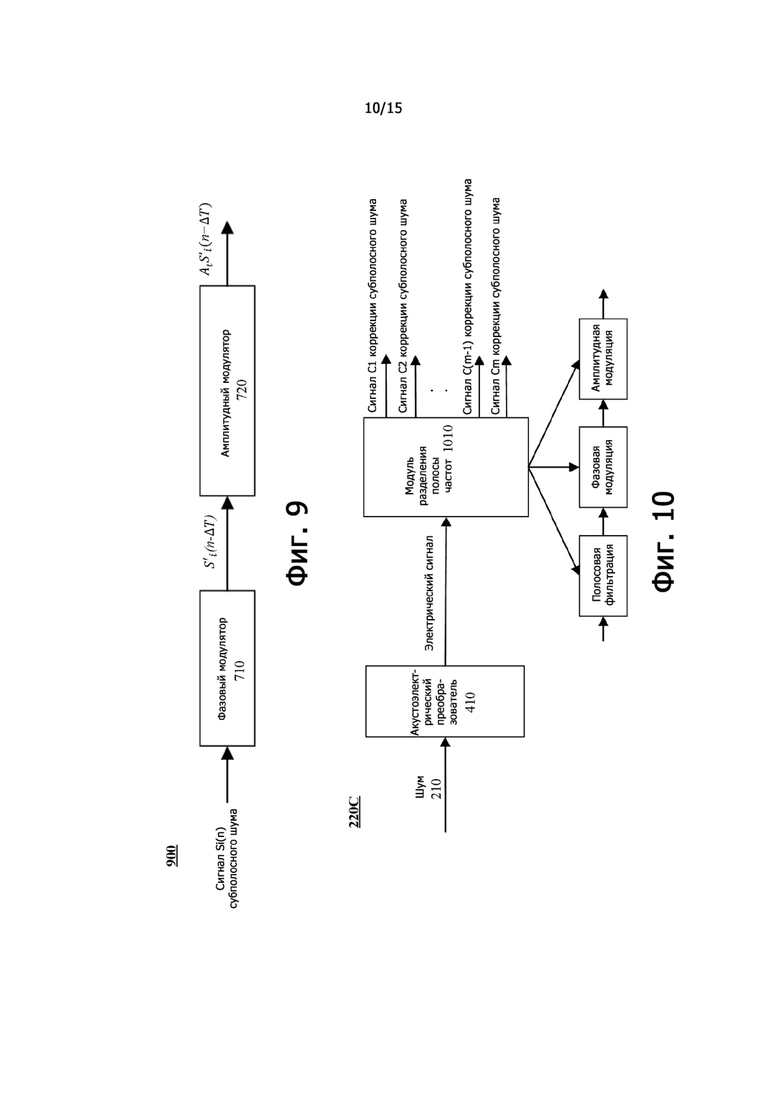
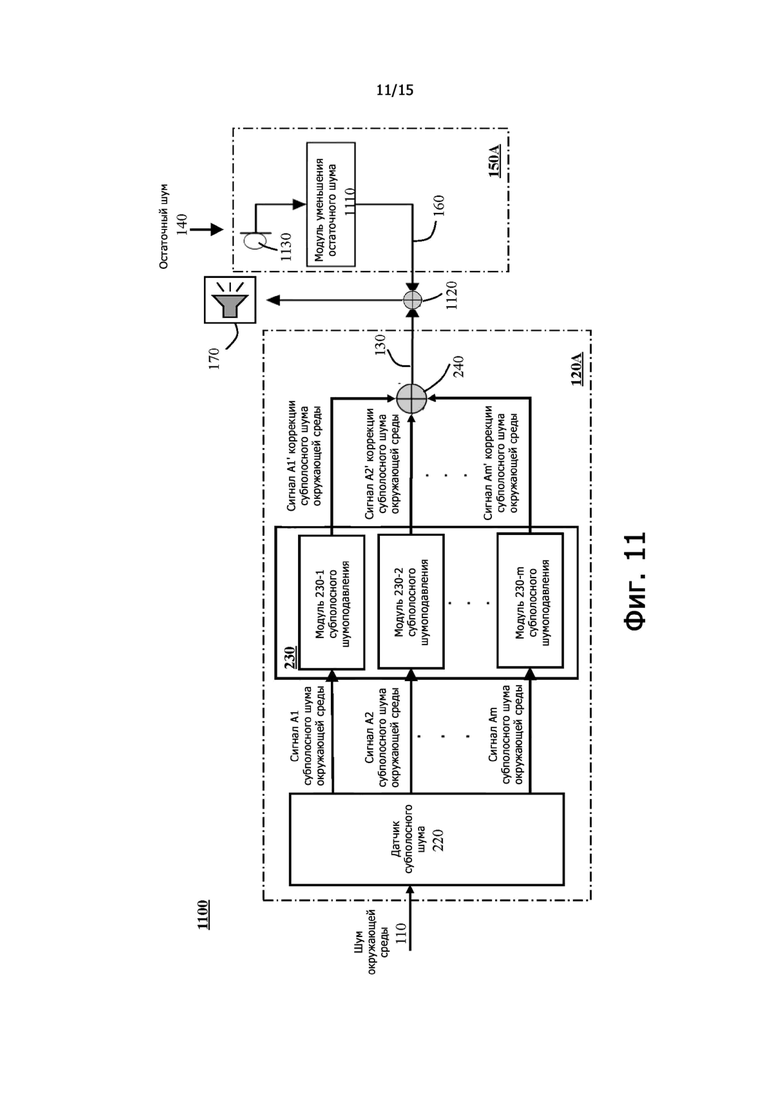
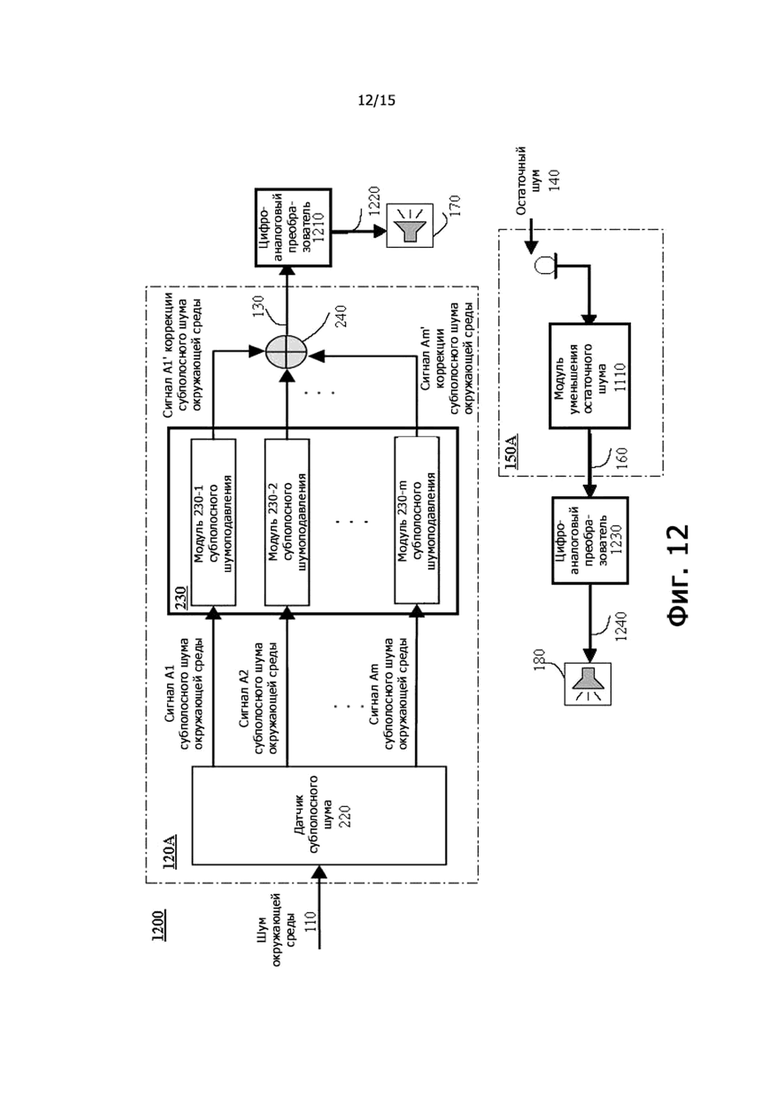
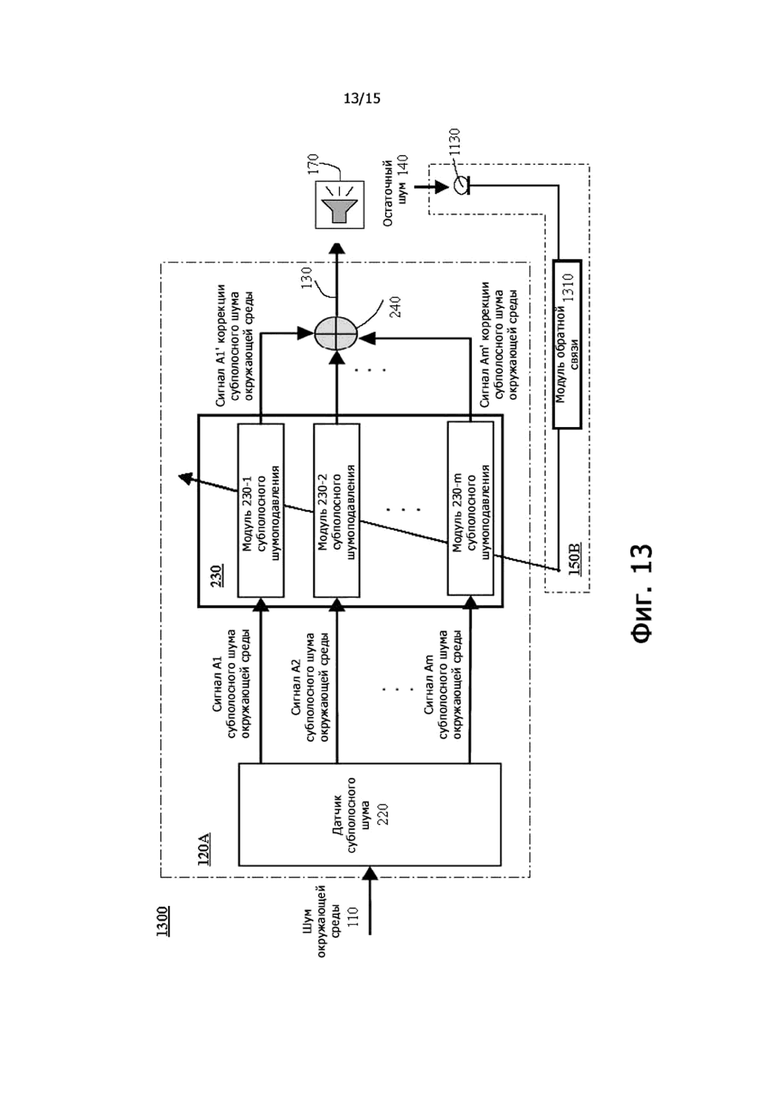
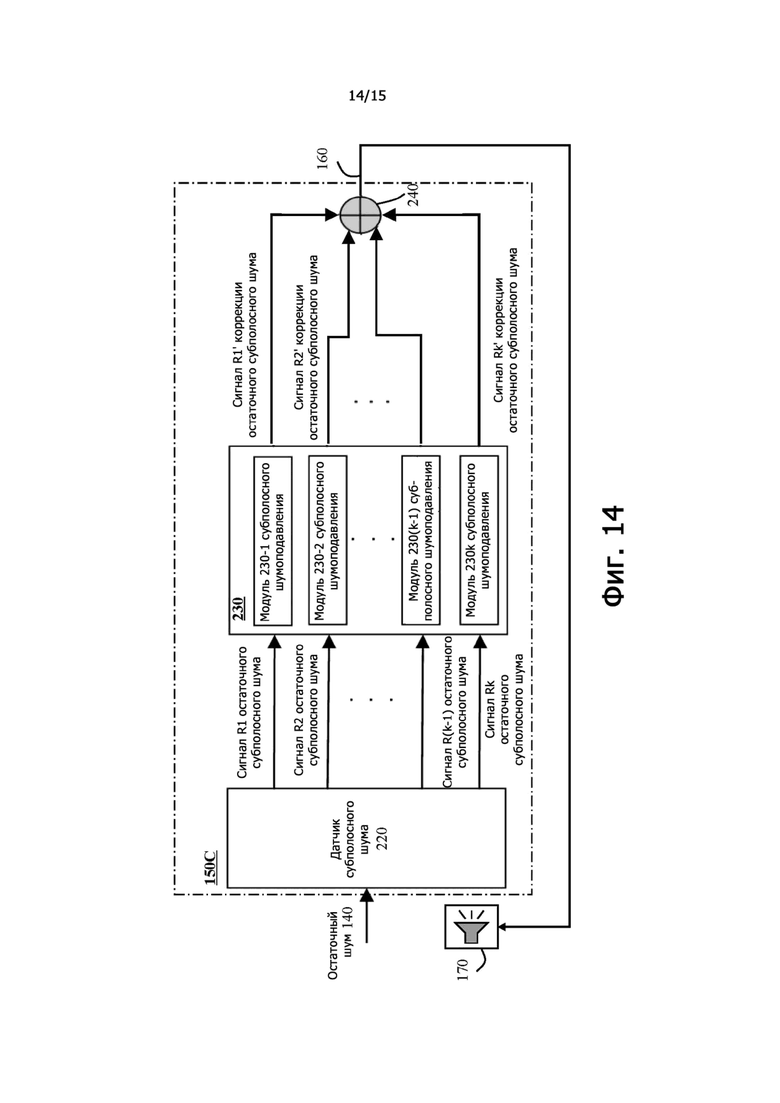
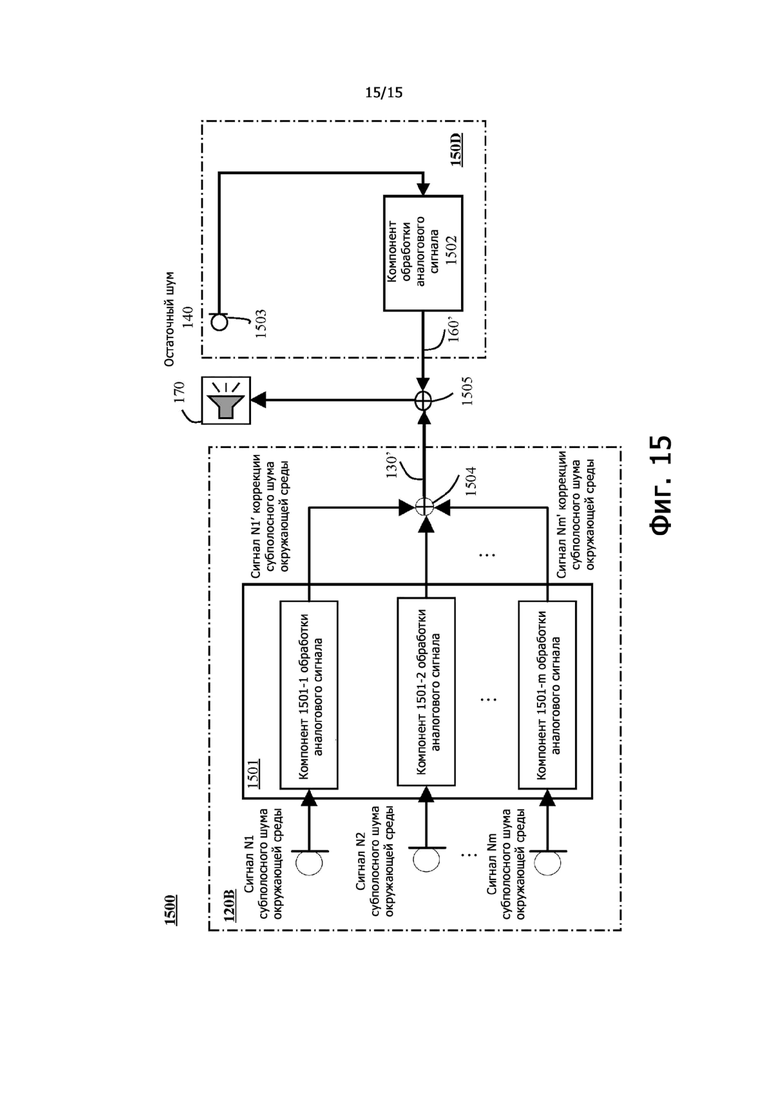
Изобретение относится к области акустического шумоподавления. Технический результат заключается в повышении эффекта шумоподавления. Технический результат достигается за счет системы шумоподавления, включающей в себя датчик субполосного шума, множество модулей субполосного подавления и модуль вывода. Датчик субполосного шума может быть выполнен с возможностью обнаружения шума и выработки множества сигналов субполосного шума в ответ на обнаруженный шум. Каждый из множества сигналов субполосного шума может иметь отличную от других субполосу из полосы частот шума. Каждый из модулей субполосного шумоподавления может быть выполнен с возможностью приема одного из сигналов субполосного шума от датчика субполосного шума и выработки сигнала коррекции субполосного шума для уменьшения принятого сигнала субполосного шума. Модуль вывода может быть выполнен с возможностью приема сигналов коррекции субполосного шума и вывода сигнала коррекции шума для шумоподавления на основе сигналов коррекции субполосного шума. 9 з.п. ф-лы, 17 ил.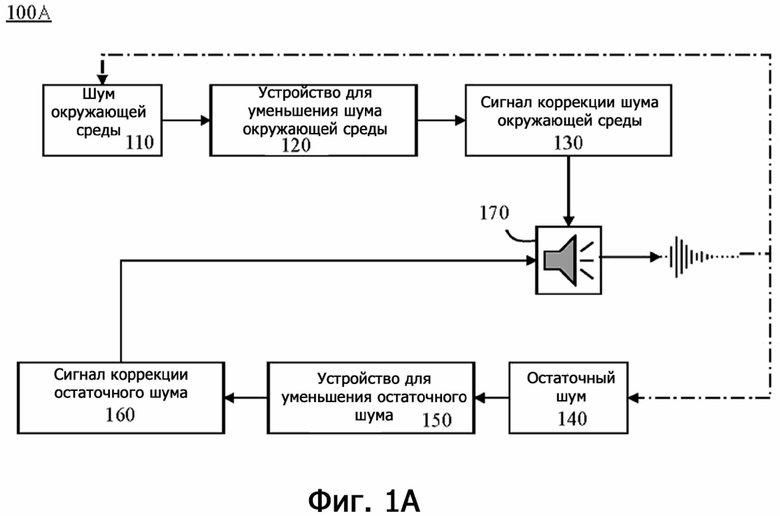
1. Система шумоподавления, содержащая:
датчик субполосного шума, выполненный с возможностью обнаружения шума и выработки множества сигналов субполосного шума в ответ на обнаруженный шум, причем каждый из сигналов субполосного шума имеет отличную от других субполосу из полосы частот шума, причем шум включает в себя шум окружающей среды;
множество модулей субполосного шумоподавления, причем каждый из модулей субполосного шумоподавления выполнен с возможностью приема одного из сигналов субполосного шума от датчика субполосного шума и выработки сигнала коррекции субполосного шума для уменьшения принятого сигнала субполосного шума;
модуль вывода, выполненный с возможностью приема сигналов коррекции субполосного шума и вывода сигнала коррекции шума для шумоподавления на основе сигналов коррекции субполосного шума;
датчик остаточного шума, выполненный с возможностью обнаружения остаточного шума и выработки сигнала остаточного шума в ответ на обнаруженный остаточный шум, причем расстояние между датчиком остаточного шума и модулем вывода меньше, чем расстояние между датчиком субполосного шума и модулем вывода; и
модуль уменьшения остаточного шума, выполненный с возможностью приема сигнала остаточного шума и выработки сигнала коррекции остаточного шума для уменьшения остаточного шума.
2. Система по п.1, в которой датчик субполосного шума содержит:
акустоэлектрический преобразователь, выполненный с возможностью обнаружения шума и преобразования шума в электрический сигнал; и
модуль разделения полосы, подключенный к акустоэлектрическому преобразователю и выполненный с возможностью разделения электрического сигнала на сигналы субполосного шума,
причем модуль разделения полосы содержит множество полосовых фильтров, причем каждый из полосовых фильтров имеет уникальную частотную характеристику и выполнен с возможностью выработки одного из сигналов субполосного шума.
3. Система по п.2, в которой:
первый полосовой фильтр из полосовых фильтров имеет первую частотную характеристику и выполнен с возможностью выработки первого сигнала субполосного шума из сигналов субполосного шума,
второй полосовой фильтр из полосовых фильтров имеет вторую частотную характеристику и выполнен с возможностью выработки второго сигнала субполосного шума из сигналов субполосного шума, причем второй сигнал субполосного шума является соседним с первым сигналом субполосного шума среди сигналов субполосного шума в частотной области, при этом
первая частотная характеристика и вторая частотная характеристика пересекаются в точке частоты, которая находится рядом по меньшей мере с одной из: точки половинной мощности первой частотной характеристики или точки половинной мощности второй частотной характеристики.
4. Система по п.1, в которой датчик субполосного шума содержит:
множество акустоэлектрических преобразователей, каждый из которых имеет уникальную частотную характеристику и выполнен с возможностью выработки электрического сигнала субполосного шума путем обработки шума; и
множество модулей дискретизации, причем каждый из модулей дискретизации выполнен с возможностью приема одного электрического сигнала субполосного шума из электрических сигналов субполосного шума и дискретизации принятого электрического сигнала субполосного шума для выработки одного сигнала субполосного шума из сигналов субполосного шума.
5. Система по п.4, в которой:
первый акустоэлектрический преобразователь из акустоэлектрических преобразователей имеет первую частотную характеристику и выполнен с возможностью выработки электрического сигнала субполосного шума, соответствующего первому сигналу субполосного шума из сигналов субполосного шума,
второй акустоэлектрический преобразователь из акустоэлектрических преобразователей имеет вторую частотную характеристику и выполнен с возможностью выработки электрического сигнала субполосного шума, соответствующего второму сигналу субполосного шума из сигналов субполосного шума, причем второй сигнал субполосного шума является соседним с первым сигналом субполосного шума среди сигналов субполосного шума в частотной области, при этом
первая частотная характеристика и вторая частотная характеристика пересекаются в точке частоты, которая находится рядом по меньшей мере с одной из: точки половинной мощности первой частотной характеристики или точки половинной мощности второй частотной характеристики.
6. Система по п.5, в которой по меньшей мере один модуль субполосного шумоподавления из модулей субполосного шумоподавления содержит:
фазовый модулятор, выполненный с возможностью приема соответствующего сигнала субполосного шума и выработки фазомодулированного сигнала путем модуляции фазы соответствующего сигнала субполосного шума; и
амплитудный модулятор, выполненный с возможностью приема фазомодулированного сигнала от фазового модулятора и выработки сигнала коррекции субполосного шума для уменьшения соответствующего сигнала субполосного шума путем модуляции амплитуды фазомодулированного сигнала.
7. Система по п.6, в которой фазовая модуляция соответствующего сигнала субполосного шума включает в себя инверсию фазы соответствующего сигнала субполосного шума, и
фазовая модуляция соответствующего сигнала субполосного шума дополнительно включает в себя компенсацию фазового смещения соответствующего сигнала субполосного шума при его передаче из датчика субполосного шума в фазовый модулятор.
8. Система по любому из пп. 1-7, в которой:
сигнал остаточного шума, вырабатываемый датчиком остаточного шума, включает в себя множество сигналов остаточного субполосного шума, и
сигнал коррекции остаточного шума включает в себя множество сигналов коррекции остаточного субполосного шума, причем каждый из сигналов коррекции остаточного субполосного шума выполнен с возможностью уменьшения одного из сигналов остаточного субполосного шума.
9. Система по любому из пп. 1-8, дополнительно содержащая:
модуль обратной связи, выполненный с возможностью регулировки модулей субполосного шумоподавления в соответствии с остаточным шумом.
10. Система по любому из пп.1-9, в которой модуль вывода включает в себя:
блок обработки сигналов, выполненный с возможностью обработки сигнала коррекции шума; и
электроакустический преобразователь, выполненный с возможностью преобразования обработанного сигнала коррекции шума в аудиосигнал и вывода аудиосигнала.
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 8958572 B1, 17.02.2015 | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| СИСТЕМА АКТИВНОГО ШУМОПОДАВЛЕНИЯ И ПОДАВЛЕНИЯ ВИБРАЦИИ | 2016 |
|
RU2709700C2 |

