Область техники, к которой относится изобретение
Настоящее изобретение относится к транспорту, в частности, к высокоскоростному магнитолевитационному транспорту.
Уровень техники
Из патента JP2003333709 известно транспортное средство с электродинамическим подвесом, представляющее собой вагон, снабженный электромагнитными обмотками на бортах и колесами снизу. Вагон предназначен для передвижения в путевой структуре в виде открытого вверх желоба, на боковых поверхностях которого установлены пассивные двухпетлевые катушки, а нижняя поверхность представляет собой горизонтальную площадку для качения колес вагона.
Двухпетлевые катушки на боковых поверхностях путевой структуры и электромагнитные обмотки на бортах вагона во взаимодействии друг с другом обеспечивают электродинамическую левитацию при достаточной для этого скорости перемещения вагона вдоль путевой структуры. На стоянке и при наборе скорости вагон перемещается на колесах по горизонтальной поверхности пути.
Начало движения транспортного средства совершается на колесах с некоторой исходной величиной зазора h0. По мере увеличения скорости происходит монотонное увеличение левитационной силы без изменения зазора. При достижении скорости отрыва V0 левитационная сила сравнивается с весом транспортного средства. Дальнейшее увеличение скорости движения приводит к отрыву колес и монотонному увеличению зазора h>h0. На всех скоростях V>V0 реализуется та величина зазора h, на которой левитационная сила FL равна весу транспортного средства P. На максимальной скорости движения высота зазора h принимает максимальное значение.
Таким образом, при применении классического электродинамического подвеса транспортное средство по мере увеличения скорости всегда приподнимается над путевой структурой по отношению к первоначальному положению на колесах.
Недостатком описанного транспортного средства является применение колес для обеспечения нахождения вагона в требуемом положении на стоянке, а также для обеспечения перемещения вагона на малых скоростях, когда электродинамическая сила недостаточна для удержания вагона на заданной высоте.
Раскрытие изобретения
Задачей изобретения является исключение колес или пар скольжения, которые могут быть применены в качестве замены колес, из левитационного транспорта и обеспечение его левитации как в движении с любыми скоростями, так и на стоянке при том же или незначительно возросшем уровне энергопотребления, что и у левитационного транспорта с электродинамическим подвесом и колесами из уровня техники.
Задача изобретения решается с помощью способа функционирования комбинированного подвеса, содержащего корпус с боковыми стенками и кронштейнами (выступами), направленными вниз. К боковым стенкам корпуса прикреплены электромагнитные обмотки с возможностью формирования магнитного поля в боковом направлении снаружи корпуса. К кронштейнам прикреплены гибридные электромагниты, включающие в себя магнитопровод, электромагниты и постоянные магниты, формирующие магнитное поле в вертикальном направлении (в частности, вверх) под корпусом.
Комбинированный подвес предназначен для перемещения вдоль протяженной путевой структуры, включающей в себя боковые катушки и ферромагнитную направляющую.
Способ содержит следующие шаги:
на стоянке и/или при малых скоростях движения левитацию транспортного средства с комбинированным подвесом обеспечивают в основном гибридные электромагниты, взаимодействующие с ферромагнитной направляющей;
в движении, в том числе с большими скоростями, левитацию транспортного средства с комбинированным подвесом обеспечивают электромагнитные обмотки, взаимодействующие с боковыми катушками путевой структуры;
при начале движения и/или увеличении скорости движения транспортное средство с комбинированным подвесом опускается вниз относительно боковых катушек путевой структуры;
при завершении движения и/или уменьшении скорости движения транспортное средство с комбинированным подвесом поднимается вверх относительно боковых катушек путевой структуры.
Путевая структура может содержать двупетлевые катушки.
В движении в дополнение к электромагнитным обмоткам левитацию комбинированного подвеса могут также обеспечивать и гибридные электромагниты, взаимодействующие с ферромагнитной направляющей. Например, на максимальной скорости движения левитацию не менее чем на 10% могут обеспечивать гибридные электромагниты, взаимодействующие с ферромагнитной направляющей и не более чем на 90% могут обеспечивать электромагнитные обмотки, взаимодействующие с боковыми катушками путевой структуры.
Задача изобретения также решается с помощью транспортного средства с комбинированным подвесом, содержащим корпус с боковыми стенками и кронштейнами, направленными вниз. К боковым стенкам корпуса прикреплены электромагнитные обмотки с возможностью формирования магнитного поля в боковом направлении снаружи корпуса. К кронштейнам прикреплены гибридные электромагниты, включающие в себя магнитопровод, электромагниты и постоянные магниты, формирующие магнитное поле (в частности, в вертикальном направлении, преимущественно, вверх) под корпусом.
Такое транспортное средство представляет собой высокоскоростной магнитолевитационный транспорт с комбинированным подвесом, функционирующий в соответствии с любым из вариантов вышеописанного способа по настоящему изобретению.
Кронштейны могут быть снабжены в нижней части горизонтальными площадками, к которым крепятся гибридные электромагниты.
Технический результат изобретения заключается в обеспечении бесконтактной левитации транспортного средства с электродинамическим подвесом как в движении с любыми скоростями, так и на стоянке, при одновременном обеспечении пониженного (практически нулевого) энергопотребления в режиме стоянки и на низких скоростях, а также при одновременном обеспечении возможности регулирования положения транспортного средства по высоте относительно путевой структуры как на стоянке, так и в движении.
Одновременное достижение всех составных частей технического результата - обеспечение левитации как в движении с любой скоростью, так и на стоянке, при низком энергопотреблении и регулировании положения транспортного средства по высоте - является важным ввиду того, что переход от прототипа из уровня техники, использующего электродинамическую левитацию в движении и колеса на стоянке к левитации как в движении, так и на стоянке имеет смысл только при обеспечении аналогичных экономических характеристик, что с технической точки зрения выражается в энергопотреблении, так и при обеспечении реализуемости и безопасности левитации на стоянке, что невозможно без регулирования положения транспортного средства по высоте, поскольку иначе оно упадет или придет в соприкосновение с магнитопроводом, вследствие чего ни левитация, ни движение транспортного средства будет невозможным.
Указанный технический результат достигается за счет комбинирования в транспортном средстве элементов электродинамического подвеса и гибридного электромагнитного подвеса (то есть применения комбинированного подвеса), которые при перемещении транспортного средства вдоль соответствующей путевой структуры обеспечивают электродинамическую левитацию на высоких скоростях (работают боковые обмотки) и электромагнитную левитацию на низких скоростях и стоянке (работают нижние гибридные электромагниты). Регулирование положения транспортного средства по высоте относительно путевой структуры на стоянке и малых скоростях обеспечивается электромагнитами, входящими в состав гибридных электромагнитов, а в движении - боковыми обмотками, обеспечивающими электродинамическую левитацию, и, в некоторых случаях, гибридными электромагнитами.
Кроме того, указанный технический результат достигается за счет способа функционирования комбинированного подвеса, в соответствии с которым при начале движения и/или увеличении скорости движения комбинированный подвес опускается вниз, а при завершении движения и/или уменьшении скорости движения комбинированный подвес поднимается вверх относительно боковых катушек путевой структуры. Поскольку протяженная путевая структура, для перемещения вдоль которой предназначен комбинированный подвес, содержит боковые катушки и ферромагнитную направляющую, пространственно зафиксированные друг относительно друга, опускание при увеличении скорости и подъем при уменьшении скорости транспортного средства с комбинированным подвесом будут одновременно происходить как относительно боковых катушек путевой структуры, так и относительно ферромагнитной направляющей путевой структуры.
Ввиду того, что минимальная (нулевая) скорость транспортного подвеса относительно путевой структуры будет на стоянке, транспортный подвес будет иметь максимально высокое положение относительно боковых катушек и ферромагнитной направляющей путевой структуры. Это означает, что на стоянке между гибридными электромагнитами и ферромагнитной направляющей путевой структуры будет наблюдаться минимальный зазор, поскольку гибридные магниты могут только притягиваться к ферромагнитной направляющей и, значит, они должны быть снизу ферромагнитной направляющей и притягиваться к ней вверх, оставаясь при этом на допустимом расстоянии, дающем возможность перемещения относительно путевой структуры при начале движения.
Такая конфигурация комбинированного подвеса и такой способ его функционирования обеспечивают достижение указанного технического результата, поскольку в противном случае, в соответствии со способом из уровня техники, когда при начале движения и наборе скорости подвес поднимается вверх относительно путевой структуры, комбинированный подвес по настоящему изобретению не сможет двигаться, поскольку при подъеме вверх неизбежно произойдет контакт (соединение, прилипание) гибридных электромагнитов и ферромагнитной направляющей ввиду расположения гибридных электромагнитов под ферромагнитной направляющей, что воспрепятствует какому-либо движению электромагнитного подвеса и транспортного средства с таким подвесом относительно путевой структуры.
Исходя из вышеизложенного, способ функционирования комбинированного подвеса в соответствии с настоящим изобретением обеспечивает возможность достижения транспортным средством с комбинированным подвесом указанного технического результата, поскольку без такого способа транспортное средство с комбинированным подвесом не сможет перемещаться относительно путевой структуры.
Краткое описание чертежа
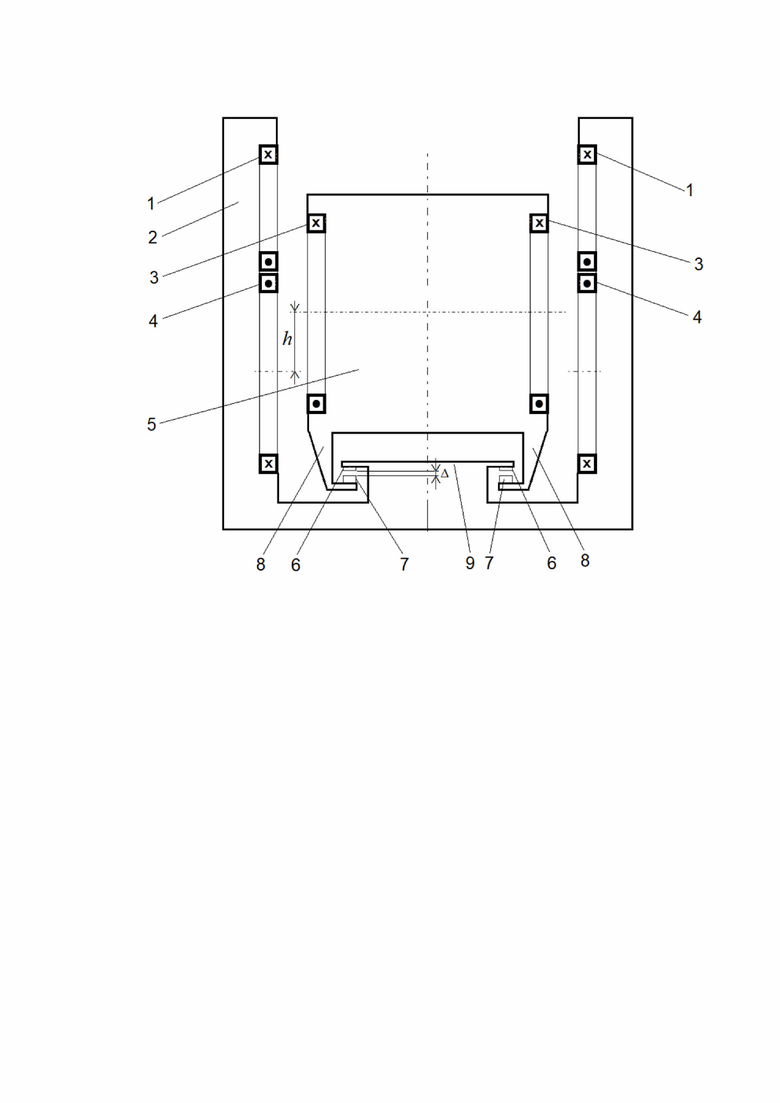
На фигуре показано транспортное средство в соответствии с настоящим изобретением в поперечном разрезе внутри путевой структуры.
Осуществление изобретения
Далее изобретение описано по отношению к фигуре, на которой представлен предпочтительный вариант осуществления изобретения. Описываемый предпочтительный вариант, показанный на фигуре, не является ограничивающим объем охраны изобретения и предназначен лишь для пояснения ее сущности. Объем охраны изобретения определяется последующей формулой изобретения.
На фигуре показано транспортное средство с комбинированным подвесом, содержащее корпус 5 с боковыми стенками и кронштейнами 8, выступающими вниз. Корпус транспортного средства может содержать дно, соединяющее боковые стенки и расположенное над горизонтальными площадками стола 9 в основании желоба и гибридными электромагнитами на расстоянии, достаточным для размещения под дном части ферромагнитного рельса с зазорами между рельсом и дном, а также между рельсом и гибридными электромагнитами. В другом варианте корпус транспортного средства может содержать продольную раму, а также поперечную раму, соединяющую боковые стенки и расположенную над горизонтальными площадками и гибридными электромагнитами на расстоянии, достаточным для размещения под рамой части ферромагнитного рельса с зазорами между рельсом и рамой, а также между рельсом и гибридными электромагнитами.
Соединение боковых стенок дном или рамой обеспечивает удержание в заданном положении электромагнитов (электромагнитных обмоток), что создает возможность непрерывного и контролируемого электродинамического взаимодействия электромагнитных обмоток транспортного средства с пассивными катушками путевой структуры. В то же время указанное расстояние между дном (рамой) и горизонтальными площадками и гибридными электромагнитами, обеспечивает возможность размещения под дном части ферромагнитного рельса так, чтобы он не касался ни дна (рамы), ни гибридных электромагнитов, и чтобы между гибридными электромагнитами и рельсом был зазор, достаточный для электромагнитного взаимодействия, обеспечивающего левитацию транспортного средства на стоянках и при низких скоростях.
Рама транспортного средства может быть выполнена в виде отдельных поперечных балок или балок, соединенных между собой и расположенных как поперечно, так и продольно. Корпус транспортного средства может не иметь рамы или балок и быть выполненным в виде единой несущей силовой конструкции (монокок).
Корпус транспортного средства, в том числе кронштейны, выступающие вниз, рама и другие элементы, могут изготавливаться из широко применяемых в уровне техники конструкционных материалов, таких как металлы, полимеры, композиты и другие. Они должны обеспечивать достаточную механическую прочность. Соединяться элементы корпуса могут с помощью известных из уровня техники способов, таких как сварка, винтовое/болтовое/клепаное соединение, приклеивание, прижим или зажим и т.п.
Во всех случаях материалы, используемые для создания стенок проницаемых для магнитного поля, должны обеспечивать достаточную механическую прочность, коррозионную стойкость и защиту электрических цепей от негативных внешних факторов. Защита от неблагоприятных атмосферных условий обеспечивается использованием соответствующих покрытий.
К боковым стенкам корпуса 5 прикреплены обмотки 3, обеспечивающие формирование магнитного поля в боковом направлении снаружи корпуса 5. Магнитное поле от обмоток 3 обеспечивает возможность осуществления электродинамической левитации относительно путевой структуры 2 и стационарных двухпетлевых катушек с петлями 1 и 4, расположенных в боковых стенках желоба путевой структуры 2.
Боковые обмотки 3 (электромагнитные катушки) могут быть прикреплены к наружным или внутренним поверхностям боковых стенок корпуса 5 или могут быть размещены внутри боковых стенок, причем в последних двух случаях боковые стенки выполняются проницаемыми для магнитного поля. Во всех случаях размещения электромагнитных катушек на боковых стенках корпуса транспортного средства желательно предусматривать соответствующие экраны для защиты (ограждения) пассажиров и перевозимого груза от воздействия электромагнитных полей.
Корпус 5 снабжен кронштейнами 8, направленные вниз, к которым под корпусом прикреплены гибридные электромагниты 7. Кронштейны 8 снизу корпуса транспортного средства, предназначенные для размещения гибридных электромагнитов 7, могут быть выполнены съемными. Кронштейны внизу могут быть расположены в углах и прикреплены к боковым стенкам и, таким образом, являться продолжением боковых стенок. В другом варианте кронштейны могут быть расположены под корпусом и прикреплены к дну или поперечной раме.
Гибридные электромагниты 7 могут быть прикреплены к кронштейнам 8 непосредственно или через горизонтальные площадки, которые могут прикрепляться к кронштейнам 8 и к которым могут прикрепляться гибридные электромагниты 7. Гибридные электромагниты могут быть прикреплены к горизонтальным площадкам сверху или через площадки так, что будут обращены рабочей поверхностью (где создается требуемое магнитное поле и с которой образуется рабочий зазор с феррорельсом) вверх к месту размещения ферромагнитного рельса. В другом варианте гибридные электромагниты могут быть прикреплены к горизонтальным площадкам снизу или через площадки так, что будут обращены рабочей поверхностью вверх к месту размещения ферромагнитного рельса через горизонтальную площадку и зазор образуемый горизонтальной площадкой, которая должна быть выполнена проницаемой для магнитного поля. Горизонтальные площадки могут быть расположены под корпусом или выступать за вертикальные боковые проекции корпуса.
Гибридные электромагниты 7 включают в себя электромагниты и постоянные магниты, формирующие под корпусом 5 магнитное поле, направленное в вертикальном направлении, в частности, вверх. Кроме того, гибридные электромагниты содержат сердечники или магнитопроводы для направления магнитного поля вверх. Материал сердечников электромагнитных катушек должен обеспечивать малые потери при перемагничивании и не иметь высокой остаточной намагниченности.
Транспортное средство с комбинированным подвесом предназначено для перемещения в путевой структуре 2, показанной на фигуре, состоящей из боковых стенок, на которых вдоль путевой структуры установлены стационарные двухпетлевые катушки 1 и 4, и нижней ферромагнитной направляющей 6, установленной на нижней Т-образной структуре, обеспечивающей возможность размещения гибридных электромагнитов 7 под направляющей 6.
В предпочтительном варианте путевая структура может быть выполнена в виде U-образного желоба, открытого вверх. В другом варианте путевая структура может иметь стенки, соединенные поперечными балками или рамой. Во всех вариантах исполнения путевая структура имеет необходимые дренажные отверстия для удаления атмосферных осадков. Дренажные отверстия предусматриваются в наиболее низких местах с целью их гарантированного удаления самотеком.
Путевая структура 2 на фигуре содержит пассивные двухпетлевые катушки с верхней петлей 1 и нижней петлей 4, в боковых стенках путевой структуры. Пассивные двухпетлевые катушки путевой структуры выполняются в виде восьмерки для генерирования разнонаправленных электродвижущих сил от инициирующей боковой обмотки 3 транспортного средства и позволяют создать условия для формирования равновесной зоны, в которую попадает транспортное средство при движении с расчетной максимальной скоростью.
В некоторых случаях в боковых стенках путевых структур могут применяться однопетлевые электромагнитные катушки. Однопетлевые катушки позволяют сформировать только поднимающую электромагнитную силу и не формируют равновесной зоны для транспортного средства, в которой они уравновешивают друг друга при движении транспортного средства с расчетной максимальной скоростью. Это требует дополнительных конструктивных изменений в системе управления транспортного средства, но позволяет сократить расход электропроводного материала в связи с исключением второй петли.
В нижней части путевой структуры 2 установлен один или более ферромагнитный рельс (направляющая) 6. Одна ферромагнитная направляющая устанавливается в том случае, когда она имеет достаточную ширину, чтобы к ней могли притягиваться гибридные электромагниты с двух сторон от плоскости симметрии транспортного средства, проходящей вдоль него и вдоль пути следований и расположенной вертикально через транспортное средства. Данная плоскость симметрии предназначена только для элементов транспортного средства, обеспечивающих его перемещение и нахождение в заданном положении на стоянке. Вместо одной широкой ферромагнитной направляющей могут применяться две узкие направляющие 6, показанные на фигуре, которые устанавливаются с двух сторон от плоскости симметрии на Т-образном основании 9 так, чтобы располагаться над гибридными электромагнитами транспортного средства.
Т-образное основание 9, на котором размещена стальная направляющая 6, может быть изготовлен из соответствующих конструкционных материалов (металлические сплавы, полимеры, железобетон или др.) из расчета полной нагрузки от транспортного средства. Во всех случаях корпусные конструкции транспортного средства и соответствующего элемента путевой структуры должны выдерживать полный вес транспортного средства в случае остановки на них транспортного средства (в аварийной или иной нештатной ситуации), что обеспечивается выбором соответствующих конструкционных материалов и методов их соединения.
Транспортное средство с комбинированным подвесом размещается в путевой структуре 2 между боковыми стенками так, чтобы боковые электромагнитные обмотки 3 транспортного средства были расположены напротив боковых петель 1 и 4 путевой структуры 2, а гибридные электромагниты 7 находились под ферромагнитной направляющей 6 с зазором Δ снизу, причем для обеспечения возможности перемещения также должен обеспечиваться и некоторый зазор между направляющей 6 и корпусом 5.
Работа комбинированного подвеса, совмещающего классический двухпетлевой электродинамический подвес и гибридный электромагнитный подвес, заключается в следующем.
В транспортном средстве система управления одновременно отслеживает величину двух воздушных левитационных зазоров. Первый воздушный левитационный зазор h между центром нижней петли 4 двухпетлевой катушки и центром обмотки 3 на боковой стенке транспортного средства. Второй воздушный левитационный зазор Δ определяется между гибридным электромагнитом 7 и стальной направляющей 6, которая также может называться ферромагнитным рельсом. Подъем и опускание транспортного средства вызывает одинаковые по величине, но разные по направлению изменения обоих указанных воздушных левитационных зазоров.
В условиях стоянки транспортного средства гибридный электромагнитный подвес обеспечивает компенсацию полного веса транспортного средства с обеспечением равновесного левитационного воздушного зазора в обеих контролируемых автоматикой вышеуказанных зонах.
Гибридный подвес включает в себя гибридные электромагниты 7, расположенные под ферромагнитной направляющей 6 так, что благодаря магнитному полю, генерируемому постоянными магнитами и электромагнитными катушками, входящими в состав гибридных электромагнитов 7, они притягиваются вверх к этой направляющей. Величина магнитного поля, формируемого гибридными электромагнитами 7, зависящая от величины коэрцитивной силы постоянных магнитов и величины тока электромагнитных катушек, изменяемой так, чтобы транспортное средство 5, к которому с помощью выступов вниз прикреплены гибридные электромагниты 7, оказывалось в подвешенном состоянии, но при этом между гибридными электромагнитами 7 и ферромагнитной составляющей 6 оставался зазор Δ. Так обеспечивается левитация на стоянке и при малых скоростях движения.
Постоянный электрический ток в электромагнитных обмотках 3, прикрепленных вертикально к боковым стенкам транспортного средства 5, формирует постоянное магнитное поле и постоянный магнитный поток, исходящий наружу в сторону путевой структуры и расположенных на ней петлях 1 и 4 двухпетлевых катушек. При стоянке транспортного средства и при движении с незначительными скоростями магнитный поток от обмотки 3 не способен вызвать наведенные электрические токи в перекрестных петлях 1 и 4 такой величины, чтобы при взаимодействии с магнитным потоком обмотки 3 вызвать появление достаточной подъемной силы, компенсирующей вес транспортного средства.
При движении транспортного средства с достаточно высокой скоростью указанный магнитный поток от обмотки 3 по закону электромагнитной индукции генерирует электрические токи в петлях 1 и 4. Двухпетлевая катушка 1 и 4 обеспечивает условия для разнонаправленного течения в них индуцированных токов в петлях 1 и 4 при одинаковом движении относительно них катушки 3 транспортного средства.
Индуцированные в петлях 1 и 4 электрические токи создают во взаимодействии с магнитным потоком обмотки 3 разнонаправленные пондеромоторные силы, вызывающие подъем/опускание транспортного средства в равновесное положение относительно геометрических центров петель 1 и 4 и его удержание в данном положении в период движения с максимальной скоростью. В частности, петли 4 отталкивают обмотки 3, в результате чего транспортное средство испытывает подъемную силу, поскольку горизонтальные отталкивающие силы от петель 4 с двух бортов 2 путевой структуры компенсируют друг друга и остаются только силы, направленные вертикально вверх, ввиду того, что обмотки 3 расположены выше петель 4.
Петли 1 наоборот притягивают обмотки 3, поскольку в них ток течет в обратном относительно петель 4 направлении (петли 1 и 4 - перекрестные), в результате чего также создается подъемная сила, поскольку горизонтальные притягивающие силы от петель 1 с двух бортов 2 путевой структуры компенсируют друг друга и остаются только силы, направленные вертикально вверх, ввиду того, что обмотки 3 расположены ниже петель 1. Таким образом, петли 1 и 4 обеспечивают подъемную силу для обмоток 3.
При наборе или снижении скорости транспортного средства соответствующий подъем или опускание транспортного средства компенсируются системой управления транспортного тока посредством изменения величины управляющего электрического тока в катушках электромагнитов гибридного электромагнитного подвеса с таким условием, что бы выполнялось условие сохранения величины равновесного левитационного воздушного зазора.
При наборе или снижении скорости, а также в ходе движения транспортного средства все указанные зазоры динамически изменяются вследствие совокупного воздействия на транспортное средство электромагнитных сил, вызванных взаимодействием индуцированных электрических токов в петлях 1 и 4 с инициирующим магнитным потоком от обмотки 3 транспортного средства, а также магнитного взаимодействия электромагнитов 7 с ферромагнитной направляющей 6. Система управления гибридным электромагнитным подвесом формирует управляющие электрические токи в электромагнитах 7 таким образом, чтобы они во взаимодействии с ферромагнитной направляющей 6 формировали результирующие электромагнитные силы, обеспечивающие гарантированные безопасные зазоры с учетом величины равновесного левитационного воздушного зазора, требуемого для работы описываемого изобретения. Таким образом, электромагниты 7 в любой момент времени создают достаточную по величине и направлению дополнительную магнитную силу для компенсации веса транспортного средства, вызванного недостаточной электродинамической силой от взаимодействия электрических индуцированных токов в перекрестных катушках 1 и 4 и магнитного потока инициирующей обмотке 3 транспортного средства.
Пондемоторная сила, уравновешивающая вес транспортного средства в условиях нулевой скорости (стоянка транспортного средства) и в условиях недостаточной скорости (участки разгона и торможения транспортного средства), генерируется постоянными магнитами с высокой коэрцитивной силой, встроенными в гибридные электромагниты. Незначительное количество электрической энергии необходимо для питания гибридного электромагнита и стабилизации положения транспортного средства относительной направляющих путевой структуры. Наличие гибридных электромагнитов особенно важно во время перемещения груза (движения пассажиров) в транспортном средстве вследствие непрерывного и непредсказуемого изменения центра масс транспортного средства и его отклонения от центра приложения магнитных сил электромагнитного подвеса. Компенсацию таких флуктуаций обеспечивают исключительно гибридные электромагниты, которые являются ключевым элементом активной безопасности транспортного средства в указанный период. Для существенного сокращения потребляемой электрической энергии, необходимой для реализации указанного контроля положения транспортного средства, сердечники гибридных электромагнитов выполнены из магнитомягких материалов с высокой намагничивающей способностью.
При начале движения транспортного средства и наборе им скорости происходит взаимное сцепление магнитного потока, создаваемого обмоткой 3, расположенной на боковой стенке транспортного средства, и перекрестными электропроводными петлями 1 и 4. В результате указанного взаимодействия изменения магнитного потока от каждой обмотки 3, вызванные движением транспортного средства относительно элемента путевой структуры, наводит посредством электромагнитной индукции электрические токи в петлях 1 и 4. Электромагнитная сила взаимодействия указанных возникающих токов и магнитного потока от обмотки 3 транспортного средства формирует устойчивую магнитную силу, возрастающую с ростом скорости движения, которая может полностью компенсировать вес транспортного средства при максимальных скоростях. При этом зона устойчивого равновесного стояния транспортного средства определяется как электромагнитными характеристиками двухпетлевых катушек 1 и 4, так и их конструктивным расположением на элементе путевой структуры. Электрическая мощность, потребляемая транспортным средством в период разгона, движения с постоянной скоростью и торможения, в наибольшем объеме расходуется именно на перемещение транспортного средства вдоль путевой структуры, оставшаяся часть используется для формирования магнитных сил, компенсирующих вес транспортного средства. В электрическом балансе транспортного средства гибридные электромагниты занимают незначительную долю, в связи с тем, что выполняют только компенсирующие и управляющие функции. Вместе с тем, именно наличие гибридных электромагнитов в составе предлагаемого магнитного подвеса позволяет транспортному средству в любой момент движения и стоянки сохранять продольную и поперечную устойчивость и гарантировать отсутствие механического контакта корпуса транспортного средства с элементами путевой структуры.
Как уже отмечалось, при применении классического электродинамического подвеса, известного из уровня техники, транспортное средство по мере увеличения скорости всегда приподнимается над путевой структурой по отношению к первоначальному положению на колесах. В высокоскоростном магнитолевитационном транспорте с комбинированным подвесом в соответствии с настоящим изобретением такой способ функционирования подвеса, известный из уровня техники, не применим. Происходит это по следующим причинам.
Гибридные электромагниты, заменяющие колеса и обеспечивающие левитацию транспортного средства в соответствии с настоящим изобретением на стоянке, могут только притягиваться к ферромагнитной направляющей (в отличие от электродинамического подвеса, где катушки могут отталкиваться) и, значит, они должны быть снизу ферромагнитной направляющей и притягиваться к ней вверх, оставаясь при этом на некотором расстоянии от нее для возможности перемещения относительно путевой структуры при начале движения.
Если при начале движения и наборе скорости транспортное средство с комбинированным подвесом в соответствии с настоящим изобретением будет подниматься вверх относительно путевой структуры, как это предполагается в уровне техники ввиду наращивания электромагнитного взаимодействия боковых катушек подвеса и путевой структуры, комбинированный подвес по настоящему изобретению не сможет двигаться, поскольку при подъеме вверх неизбежно произойдет контакт (соединение, прилипание) гибридных электромагнитов и ферромагнитной направляющей, так как гибридные электромагниты расположены под ферромагнитной направляющей. Такое прилипание гибридных электромагнитов воспрепятствует какому-либо движению электромагнитного подвеса и транспортного средства с таким подвесом относительно путевой структуры и произойдет авария, поскольку это будет означать мгновенную остановку транспортного средства, набравшего некоторую скорость, обеспечившую его подъем относительно путевой структуры.
Для предотвращения аварийных остановок и обеспечения беспрепятственного перемещения транспортного средства комбинированным подвесом в соответствии с настоящим изобретением предлагается следующий способ функционирования такого подвеса:
1) на стоянке левитацию комбинированного подвеса обеспечивают гибридные электромагниты, взаимодействующие с ферромагнитной направляющей;
2) в движении левитацию комбинированного подвеса обеспечивают электромагнитные обмотки, взаимодействующие с боковыми электромагнитными катушками путевой структуры;
3) при начале движения и/или увеличении скорости движения комбинированный подвес опускается вниз относительно боковых электромагнитных катушек путевой структуры;
4) при завершении движения и/или уменьшении скорости движения комбинированный подвес поднимается вверх относительно боковых электромагнитных катушек путевой структуры.
Опускание и поднимание комбинированного подвеса относительно путевой структуры при наборе скорости (в том числе и при начале движения) и при сбросе скорости (в том числе и при окончании движения), соответственно, может обеспечиваться регулированием токов, протекающих через катушки гибридных электромагнитов. В частности, при наборе скорости транспортного средства токи, протекающие через катушки гибридных электромагнитов, могут опускать транспортное средство для уменьшения силы притяжения гибридных электромагнитов к ферромагнитной направляющей. Величина снижения силы тока должна быть такой, чтобы уменьшение силы притяжения гибридных электромагнитов к ферромагнитной направляющей не только компенсировало прирост (вследствие увеличения скорости движения) подъемной силы, создаваемой боковыми электромагнитными обмотками, взаимодействующими с боковыми катушками путевой структуры по электродинамическому принципу, но и позволяло комбинированному подвесу транспортного средства дополнительно опускаться вниз относительно путевой структуры.
И наоборот, при снижении скорости транспортного средства токи, протекающие через электромагниты гибридных электромагнитов, могут увеличивать силу притяжения гибридных электромагнитов к ферромагнитной направляющей. Изменение силы тока должно быть таким, чтобы увеличение силы притяжения гибридных электромагнитов к ферромагнитной направляющей не только компенсировало падение (в следствие снижения скорости движения) подъемной силы, создаваемой боковыми электромагнитными обмотками, взаимодействующими с боковыми катушками путевой структуры по электродинамическому принципу, но и позволяло комбинированному подвесу транспортного средства дополнительно подниматься вверх относительно путевой структуры.
Боковые электромагнитные катушки и ферромагнитная направляющая протяженной путевой структуры пространственно зафиксированы друг относительно друга. Следовательно, опускание относительно боковых электромагнитных катушек путевой структуры при увеличении скорости перемещения комбинированного подвеса вдоль нее (то есть, уменьшение величины h на фигуре) будет также означать и опускание комбинированного подвеса относительно ферромагнитной направляющей путевой структуры (то есть, увеличение значения Δ на фигуре). Точно также, подъем относительно боковых электромагнитных катушек путевой структуры при уменьшении скорости перемещения комбинированного подвеса вдоль нее (то есть, увеличение h на фигуре) будет также означать и подъем комбинированного подвеса относительно ферромагнитной направляющей путевой структуры (то есть, уменьшение Δ на фигуре).
Ввиду того, что минимальная (нулевая) скорость транспортного подвеса относительно путевой структуры будет на стоянке, транспортный подвес будет иметь максимально высокое положение относительно боковых электромагнитных катушек и ферромагнитной направляющей путевой структуры. Это означает, что на стоянке между гибридными электромагнитами и ферромагнитной направляющей путевой структуры будет наблюдаться минимальный зазор Δ.
При движении транспортного средства с достаточно высокой скоростью полное отключение гибридного электромагнитного подвеса в предпочтительном варианте не предполагается в целях сохранения возможности безопасного управления транспортным средством. Предусмотренные доли распределения левитационной силы транспортного средства в указанном режиме движения могут составлять 10% за счет гибридного электромагнитного подвеса и 90% за счет электродинамического подвеса. Это позволяет использовать электромагнитные катушки, входящие в состав гибридных электромагнитов, для регулирования расположения транспортного средства по высоте при движении транспортного средства на высокой скорости в дополнение к электромагнитным обмоткам, расположенным по бортам транспортного средства и предназначенных для обеспечения электродинамической левитации в движении. Токовые катушки гибридных электромагнитов позволят обеспечить более точное регулирование положения транспортного средства как по высоте, так и по крену.
Кроме того, сохранение на уровне не менее 10% величины силы, генерируемой гибридными электромагнитами, связано с необходимостью полной обратимости режима разгона, а именно - обеспечения работоспособности электродинамической части подвеса, в которую входят боковые электромагнитные обмотки, взаимодействующие с боковые катушками путевой структуры при уменьшении скорости от максимальной величины до нуля.
Технический результат позволяет исключить механически движущиеся элементы транспортного средства, необходимые для перемещения на низких скоростях, такие как колеса. Под колесом в данном случае понимаются тела вращения, имеющие ось вращения и любую форму образующей (прямолинейная - цилиндр, наклонная - конус и др.), а также шарообразное тело вращения, которое может иметь не только ось вращения, а в том числе и точку вращения (свободновращающийся шар в опоре).
Кроме того, благодаря настоящему изобретению исключена необходимость использования других вариантов организации контакта транспортного средства с путевой структурой в условиях стоянки транспортного средства и в периоды его разгона и торможения. В частности, предлагаемый гибридный электромагнитный подвес исключает использование всех видов и форм реализации пар скольжения, которые могут быть применены в качестве замены колес в указанном транспортном средстве.
Важным свойством настоящего изобретения является исключение применения воздушной подушки между элементами гибридного электромагнитного подвеса транспортного средства и путевой структуры и воздушной смазки направляющих путевой структуры и транспортного средства, посредством которых реализуется гибридный электромагнитный подвес. Еще одним полезным свойством настоящего изобретения является исключение использования электретов для создания электростатической левитационной силы, что повысит безопасность транспортного средства по причине устранения источника помех электронным системам управления транспортным средством и источника, повышающего вероятность поражения атмосферным электричеством.
Дополнительным техническим результатом настоящего изобретения является снижение уровней шума и вибраций от транспортного средства, оборудованного гибридным электромагнитным подвесом вследствие исключения трения и качения колес транспортного средства по элементам и стыкам элементов путевой структуры. Данное обстоятельство повышает привлекательность транспортного средства для пассажиров и грузов в местностях с особыми условиями и требованиями по экологичности перевозок.
Настоящее изобретение также обеспечивает снижение материалоемкости элементов путевой структуры и транспортного средства вследствие исключения по всей протяженности путевой структуры дублирующего дорожного элемента, предназначенного для контакта с колесами транспортного средства (на случай аварийных ситуаций и остановок в пути). При этом у ферромагнитного рельса (направляющей) гибридного электромагнитного подвеса при его использовании на всей протяженности путевой структуры в любом случае будет отсутствовать физический износ и сократится структура и величина расхода легирующих добавок для повышения твердости и прочности, так как ключевым требованием является полнота магнитного взаимодействия.
Настоящее изобретение также обеспечивает улучшение технологичности строительства, монтажа, сборки, пуско-наладки, проверочных и ремонтно-восстановительных работ на элементах путевой структуры и транспортного средства, посредством которых реализуется гибридный электромагнитный подвес, в частности большими по величине допусками на строительство, ремонт и монтаж что обусловлено более комфортной отработкой таких участков гибридным электромагнитным подвесом по сравнению с механическим контактом колесных пар или пар скольжения.
Дополнительным техническим результатом настоящего изобретения является улучшение аэродинамики транспортного средства ввиду отсутствия выступающих колес и других элементов их подвески и замены на практически ровные внутренние каналы, образованные сочетанием нижней части корпуса транспортного средства и охватываемого им элемента путевой структуры, содержащего ферромагнитную направляющую, что приводит к снижению расхода энергии на перемещение транспортного средства в расчете на каждый километр пути.
Настоящее изобретение также обеспечивает более стабильное и прогнозируемое движение, обусловленное наличием системы активного управления гибридным электромагнитным подвесом транспортного средства в период его разгона и торможения, вследствие исключения механического контакта колеса транспортного средства с соответствующим элементом путевой структуры особенно в неблагоприятных атмосферных условиях. Данное обстоятельство повышает активную безопасность транспортного средства, то есть безопасность, обусловленную наличием в транспортном средстве автоматических систем контроля его движения, во всех условиях его эксплуатации.
Дополнительным техническим результатом является возможность использования электромагнитов (электромагнитных катушек), входящих в состав гибридных электромагнитов, для регулирования расположения транспортного средства по высоте при движении транспортного средства на высокой скорости в дополнение к электромагнитам (катушкам), расположенным по бортам транспортного средства и предназначенных для обеспечения электродинамической левитации в движении. Электромагнитные катушки из гибридных электромагнитов позволят обеспечить непрерывный и точный контроль регулирования положения транспортного средства как по высоте, так и по крену.
Транспортное средство может быть представлено в виде отдельного вагона и/или локомотива, а также представлять собой ряд соединенных (сочлененных) между собой вагонов и/или локомотивов. Количество и размеры таких вагонов и локомотивов определяются поставленными задачами и требованиями к грузо- и пассажироперевозкам.
Предпочтительное использование настоящего изобретения в качестве альтернативы классическому железнодорожному транспорту позволяет повысить скорость перевозки и снизить энергозатраты на ее осуществление вследствие исключения трения и механически движущихся деталей. По сравнению с авиаперевозками настоящее изобретение позволяет сократить энергозатраты ввиду перемещения транспортного средства по фиксированному пути, а также затраты времени на подготовку к полету, что в конечном итоге ускоряет перемещение грузов и пассажиров. Отдельными преимуществами предлагаемого транспортного средства являются снижение шума, улучшение экологичности, отсутствие вибраций и исключение возможности появления искр.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ КОМБИНИРОВАННОГО ПУТЕПРОВОДА | 2014 |
|
RU2573135C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2786679C2 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2739939C1 |
| ЛЕВИТИРУЮЩИЙ ПОДВЕС | 2023 |
|
RU2816409C1 |
| ГИБРИДНЫЙ МАГНИТ БЕЗ ПОЛЕЙ РАССЕЯНИЯ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2743753C1 |
| ЛЕВИТИРУЮЩИЙ ПОДВЕС С ЛИНЕЙНЫМ ДВИГАТЕЛЕМ И ПОВОРОТНЫМ УСТРОЙСТВОМ | 2023 |
|
RU2816413C1 |
| КОМБИНИРОВАННЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2573524C1 |
| МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2779326C1 |
| УСТРОЙСТВО МАГНИТНОЙ ЛЕВИТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2539304C2 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1984 |
|
SU1362241A1 |
Группа изобретений относится к магнитным подвескам для транспортных средств. Способ функционирования комбинированного подвеса, заключающийся в том, что на стоянке левитацию комбинированного подвеса обеспечивают гибридные электромагниты, взаимодействующие с ферромагнитной направляющей, в движении левитацию комбинированного подвеса обеспечивают электромагнитные обмотки, взаимодействующие с боковыми катушками путевой структуры. При этом при увеличении скорости движения комбинированный подвес опускают вниз относительно боковых катушек путевой структуры, а при уменьшении скорости движения – поднимают вверх относительно боковых катушек путевой структуры. Комбинированный подвес содержит корпус с боковыми стенками и кронштейнами, направленными вниз, причем к боковым стенкам корпуса прикреплены электромагнитные обмотки, а к кронштейнам прикреплены гибридные электромагниты. Также заявлено транспортное средство с комбинированным подвесом. Технический результат заключается в обеспечении левитации транспортного средства как в движении с любыми скоростями, так и на стоянке. 2 н. и 4 з.п. ф-лы, 1 ил. 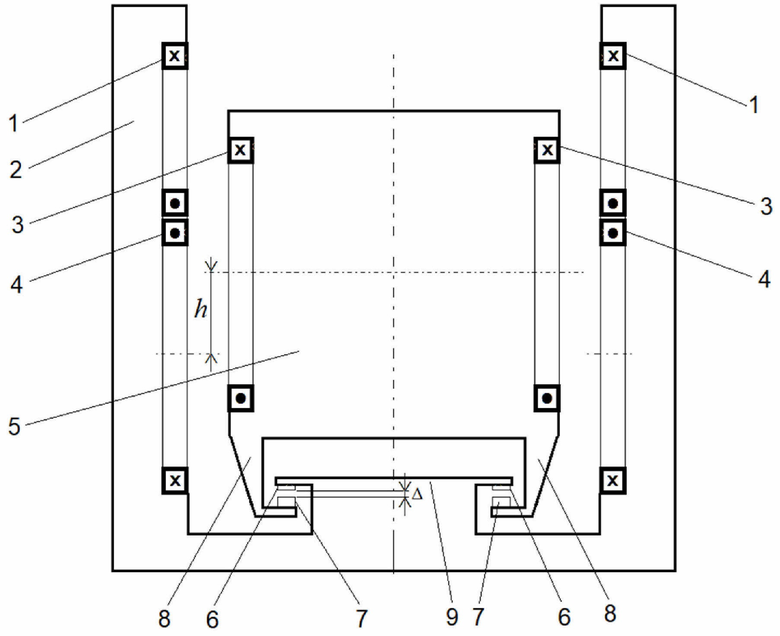
1. Способ функционирования комбинированного подвеса, содержащего корпус с боковыми стенками и кронштейнами, направленными вниз, причем к боковым стенкам корпуса прикреплены электромагнитные обмотки, выполненные с возможностью формирования магнитного поля в боковом направлении снаружи корпуса, а к кронштейнам прикреплены гибридные электромагниты, включающие в себя магнитопровод, электромагниты и постоянные магниты, выполненные с возможностью формирования магнитного поля под корпусом, причем комбинированный подвес предназначен для перемещения вдоль протяженной путевой структуры, включающей в себя боковые катушки и ферромагнитную направляющую,
причем способ содержит следующие шаги:
на стоянке левитацию комбинированного подвеса обеспечивают гибридные электромагниты, взаимодействующие с ферромагнитной направляющей;
в движении левитацию комбинированного подвеса обеспечивают электромагнитные обмотки, взаимодействующие с боковыми катушками путевой структуры;
при увеличении скорости движения комбинированный подвес опускают вниз относительно боковых катушек путевой структуры;
при уменьшении скорости движения комбинированный подвес поднимают вверх относительно боковых катушек путевой структуры.
2. Способ по п. 1, отличающийся тем, что путевая структура содержит двупетлевые катушки.
3. Способ по п. 1, отличающийся тем, что в движении левитацию комбинированного подвеса в дополнение к электромагнитным обмоткам обеспечивают также и гибридные электромагниты, взаимодействующие с ферромагнитной направляющей.
4. Способ по п. 3, отличающийся тем, что на максимальной скорости движения левитацию обеспечивают не менее чем на 10% гибридными электромагнитами, взаимодействующими с ферромагнитной направляющей и не более чем на 90% электромагнитными обмотками, взаимодействующими с боковыми катушками путевой структуры.
5. Транспортное средство с комбинированным подвесом, содержащее корпус с боковыми стенками и кронштейнами, направленными вниз, причем к боковым стенкам корпуса прикреплены электромагнитные обмотки, выполненные с возможностью формирования магнитного поля в боковом направлении снаружи корпуса, а к кронштейнам прикреплены гибридные электромагниты, включающие в себя магнитопровод, электромагниты и постоянные магниты, выполненные с возможностью формирования магнитного поля под корпусом, причем комбинированный подвес функционирует в соответствии со способом по любому из пунктов 1-4.
6. Транспортное средство по п. 5, отличающееся тем, что кронштейны могут быть снабжены в нижней части горизонтальными площадками, к которым крепятся гибридные электромагниты.
| ЭЛЕКТРИЧЕСКАЯ ТЯГОВАЯ СИСТЕМА ДЛЯ ВЫСОКОСКОРОСТНОГО НАЗЕМНОГО ТРАНСПОРТА | 2002 |
|
RU2229988C2 |
| Устройство для электромагнитной подвески транспортного средства | 1990 |
|
SU1812142A1 |
| Система электродинамического подвеса | 2018 |
|
RU2677216C1 |
| CN 201824897 U, 11.05.2011. | |||

