Изобретение относится к области электротехники, в частности к способам управления с помощью преобразователя частоты электроприводами переменного тока.
Известен способ управления асинхронным двигателем с фазным ротором, согласно которого подают в обмотку статора двигателя с выхода инвертора переменное напряжение, выпрямляют с помощью нерегулируемого выпрямителя напряжение, снимаемое с выходов обмотки ротора, выпрямляют переменное напряжение питающей сети с помощью регулируемого выпрямителя, суммируют это напряжение с выпрямленным напряжением, снимаемым с выводов обмоток ротора, подают полученную сумму этих двух напряжений на вход инвертора, напряжение, полученной с выхода инвертора, трансформируют по амплитуде и подают на обмотку статора двигателя, задают желаемое значение тока на входе инвертора, измеряют величину тока на входе инвертора, сравнивают заданное и измеренное значения токов, регулируют напряжение на выходе регулируемого выпрямителя так, чтобы поддерживать заданное значение тока на выходе инвертора, регулируют скорость двигателя изменением частоты напряжение на выходе инвертора с помощью блока задания выходной частоты инвертора [1].
Недостатками такого способа управления асинхронным двигателем с фазным ротором являются невозможность автоматического поддержания постоянства скорости двигателя в установившихся режимах при разных статических нагрузках, большое потребление регулируемым выпрямителем реактивной мощности из сети.
Наиболее близким к предлагаемому является способ управления электроприводом переменного тока, осуществляемый с помощью преобразователя частоты, содержащего выпрямитель, автономный инвертор тока, выполненный на полностью управляемых вентилях, и реактор, включенный между вентилями катодной группы выпрямителя и анодной группы инвертора, при котором регулируют входной ток инвертора в зависимости от амплитуды тока двигателя, фильтруют высокочастотные составляющие токов на выходе преобразователя частоты, измеряют мгновенные значения фазных напряжений и фазных токов двигателя и входной ток инвертора, задают амплитуду и частоту трехфазного переменного напряжения двигателя, на основе заданной амплитуды и частоты трехфазного переменного напряжения двигателя, формируют три синусоидальных сигнала задания на фазные напряжения двигателя, смещенные друг относительно друга на 2π/3, подают синусоидальные сигналы задания на напряжения фаз двигателя на первые входы трех релейных регуляторов напряжений двигателя соответствующих фаз, на вторые входы релейных регуляторов напряжений двигателя подают измеренные мгновенные значения напряжений двигателя соответствующих фаз, управляющие логические сигналы с выходов трех релейных регуляторов напряжений двигателя подают на управляющие входы тиристоров соответствующих фаз анодной группы инвертора, а также на входы логических элементов «НЕ» соответствующих фаз, управляющие логические сигналы с выходов логических элементов «НЕ» подают на управляющие входы тиристоров соответствующих фаз катодной группы инвертора, вычисляют амплитуду трехфазного тока двигателя, преобразуют вычисленное значение амплитуды трехфазного тока двигателя в сигнал задания входного тока инвертора, который подают на первый вход четвертого регулятора входного тока инвертора, на второй вход которого подают измеренное значение входного тока инвертора, фильтруют с помощью конденсатора выпрямленное нерегулируемое напряжение на выходе выпрямителя, на выходе четвертого релейного регулятора входного тока инвертора формируют логический сигнал, который подают на первый вход логического элемента «ИЛИ», измеряют мгновенные значения напряжений на входе выпрямителя, определяют значение амплитуды напряжения на входе выпрямителя и подают его на первый вход пятого релейного регулятора, заданное значение амплитуды напряжения двигателя подают на второй вход пятого релейного регулятора и первый вход шестого релейного регулятора, логический сигнал с выходе пятого релейного регулятора подают на второй вход логического элемента «ИЛИ» и первый вход логического элемента «И», сигнал с выхода логического элемента «ИЛИ» подают на управляющий вход первого полностью управляемого вентиля, установленного последовательно между катодным выходом выпрямителя и первым выводом реактора, при выключенном состоянии первого полностью управляемого вентиля отключают первый вывод реактора от выпрямителя, при этом обеспечивают непрерывность тока в звене постоянного тока с помощью обратного диода, установленного между катодным выходом выпрямителя и первым выводом реактора, при выключенном состоянии первого полностью управляемого вентиля подключают первый вывод реактора к выпрямителю, измеряют мгновенные значения напряжений двигателя, определяют значение амплитуды напряжения двигателя и подают его на второй вход шестого релейного регулятора, логический сигнал с выхода шестого релейного регулятора подают на второй вход логического элемента «И», на первый вход седьмого релейного регулятора подают значение максимально допустимого тока через реактор, измеряют значение тока через реактор и подают это значение на второй вход седьмого релейного регулятора, логический сигнал с выхода седьмого релейного регулятора подают на третий вход логического элемента «И», логический сигнал с выхода которого подают на управляющий вход второго полностью управляемого вентиля, анод которого соединен с анодным входом инвертора, а его катод соединен с анодным выходом выпрямителя, включают и выключают второй полностью управляемый вентиль, при его включенном состоянии шунтируют входную цепь инвертора и увеличивают ток, проходящий через реактор, при его выключенном состоянии прибавляют к выпрямленному напряжению наведенную в реакторе ЭДС и подают суммарное напряжение на вход инвертора [2].
Недостатками данного способа управления электроприводом переменного тока является невозможность автоматического поддержания постоянства скорости двигателя в установившихся режимах при разных статических нагрузках, невозможность поддержания постоянства пускового тока статора и стабилизации пускового момента при частотном пуске двигателя.
Предложенный способ управления решает задачи: коррекции при скалярном частотном пуске закона изменения напряжения в функции пускового тока статора; перевода в установившемся режиме асинхронного двигателя с фазным ротором в синхронный режим без использования дополнительного источника питания обмотки ротора, обеспечения в установившемся режиме абсолютно жесткой механической характеристики; снижения потребления двигателем реактивной мощности и уменьшения потребляемого тока.
Указанные задачи решаются тем, что в предлагаемом способе управления асинхронным двигателем с фазным ротором с помощью преобразователя частоты со звеном постоянного тока, содержащего выпрямитель и автономный инвертор тока, выполненный на полностью управляемых вентилях, в котором к катодному выходу выпрямителя подключен анод первого полностью управляемого вентиля, катод которого подключен к первому выводу реактора, второй вывод которого подключен к первому выводу датчика тока, при котором в режиме пуска замыкают выходы трехфазной обмотки ротора накоротко, создают электрическую цепь между вторым силовым выводом датчика тока и анодным входом инвертора, фильтруют высокочастотные составляющие токов на выходе преобразователя частоты, фильтруют с помощью конденсатора выпрямленное нерегулируемое напряжение на выходе выпрямителя, измеряют мгновенные значения фазных напряжений и фазных токов статора двигателя, вычисляют амплитуду тока и амплитуду напряжения двигателя, формируют заданную частоту и амплитуду трехфазного переменного напряжения статора двигателя, на основе сформированных сигналов частоты и амплитуды трехфазного переменного напряжения двигателя, формируют три синусоидальных сигнала задания на фазные напряжения двигателя, смещенные друг относительно друга на 2π/3, которые подают на первые входы трех релейно-гистерезисных регуляторов напряжений соответствующих фаз двигателя, на вторые входы релейно-гистерезисных регуляторов напряжений подают измеренные мгновенные значения напряжений соответствующих фаз, управляющие логические сигналы с выходов трех релейно-гистерезисных регуляторов напряжений двигателя подают на управляющие входы тиристоров соответствующих фаз анодной группы инвертора, а также на входы логических элементов «НЕ» соответствующих фаз, с выходов которых управляющие логические сигналы подают на управляющие входы тиристоров соответствующих фаз катодной группы инвертора, на выходе четвертого релейно-гистерезисного регулятора формируют логический сигнал, который подают на управляющий электрод первого полностью управляемого вентиля, при выключенном состоянии первого полностью управляемого вентиля отключают первый вывод реактора от выпрямителя, при этом обеспечивают непрерывность тока в звене постоянного тока с помощью обратного диода, установленного между катодным выходом выпрямителя и первым выводом реактора, при включенном состоянии первого полностью управляемого вентиля подключают первый вывод реактора к выпрямителю, с помощью пятого релейного, шестого и седьмого релейно-гистерезисных регуляторов формируют сигналы на включение и отключение второго полностью управляемого вентиля, катод которого соединен с катодным входом инвертора, а анод соединен с вторым силовым выводом датчика тока, включают и выключают второй полностью управляемый вентиль, при его включенном состоянии шунтируют входную цепь инвертора и увеличивают ток, проходящий через реактор, при его выключенном состоянии прибавляют к выпрямленному напряжению наведенную в реакторе ЭДС и подают суммарное напряжение на вход инвертора, подают на первый вход шестого релейно-гистерезисного регулятора сигнал задания амплитуды напряжения статора, измеренное амплитудное значение напряжения статора двигателя подают на второй вход шестого релейно-гистерезисного регулятора, логический сигнал с выхода которого подают на один вход логического элемента «И», на первый вход седьмого релейного регулятора подают значение максимально допустимого тока через реактор, измеряют значение тока через реактор и подают это значение на второй вход седьмого релейного регулятора, логический сигнал с выхода которого подают на другой вход логического элемента «И», логический сигнал с выхода которого подают на управляющий вход второго полностью управляемого вентиля, в режиме пуска задают амплитудное значение пускового тока статора, сравнивают его с вычисленным амплитудным значением пускового тока статора и определяют величину рассогласования между этими сигналами, которую подают на вход четвертого релейно-гистерезисного регулятора, и формируют логический сигнал на его выходе, также преобразуют величину рассогласования заданного и вычисленного амплитудных значений пускового тока статора в сигнал коррекции амплитуды напряжения статора, который складывают с сигналом заданной амплитуды трехфазного переменного напряжения статора, полученный суммарный сигнал амплитуды напряжения статора используют при формировании уточненных сигналов задания на фазные напряжения статора, на первый вход пятого релейного регулятора подают сигнал заданного установившегося значения частоты статора, на второй вход пятого релейного регулятора подают сигнал текущего заданного значения частоты статора, формируют логический сигнал на выходе пятого релейного регулятора, при пуске разрешают включение и отключение первого полностью управляемого вентиля, на третий вход логического элемента «И» подают через логический элемент «НЕ» сигнал с выхода пятого релейного регулятора и запрещают включение второго полностью управляемого вентиля в процессе пуска, после достижения сигналом задания частоты установившегося значения и окончания процесса пуска двигателя прекращают корректировать сигнал задания амплитуды напряжения статора, переводят первый полностью управляемый вентиль в постоянно включенное состояние, размыкают электрическую цепь между вторым силовым выводом датчика тока и анодным входом инвертора, разрывают цепь соединения фазных обмоток ротора, подключают обмотки ротора к звену постоянного тока преобразователя частоты, для чего подключают вывод одной обмотки к второму силовому выводу датчика тока, подключают вывод другой обмотки ротора к аноду одного диода, катод которого соединен с катодом другого диода, анод другого диода подключают к выводам третьей обмотки ротора, катоды обоих диодов подключают к анодному входу инвертора, разрешают включение и отключение второго полностью управляемого вентиля.
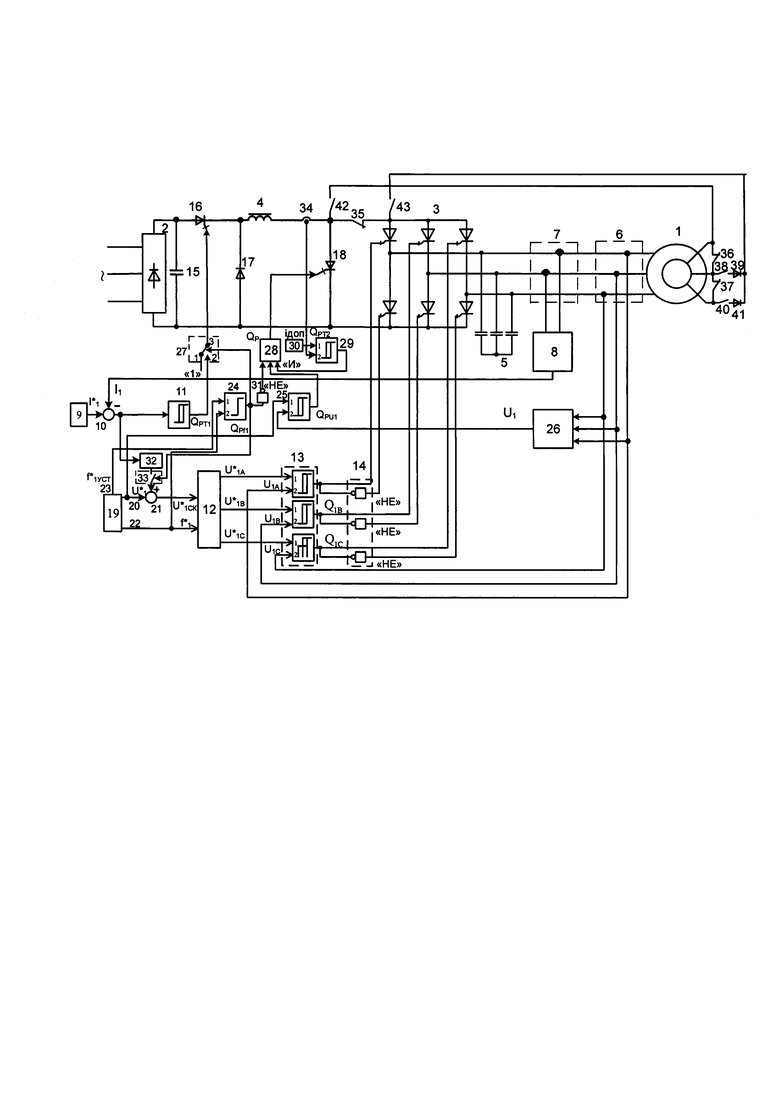
На чертеже показана схема устройства, реализующего предложенный способ управления асинхронным двигателем с фазным ротором.
Устройство, реализующее предложенный способ, содержит асинхронный двигатель с фазным ротором 1, обмотки статора которого подключены к выходам преобразователя частоты, содержащего выпрямитель 2 и инвертор 3, реактор 4, расположенный между ними. Инвертор выполнен по мостовой схеме на полностью управляемых вентилях, например GTO-тиристорах. К выходам инвертора подключена фильтрующая конденсаторная батарея 5. На выводах преобразователя частоты установлены датчики датчик фазных напряжений 6 и фазных токов 7. Выходы датчиков фазных токов 7 соединены с входом блока определения амплитуды тока статора 8. Выход блока задания амплитуды тока статора 9 соединен с положительным входом узла сравнения 10, отрицательный вход которого соединен с выходом блока определения амплитуды тока статора 8, выход узла сравнения 10 соединен с входом релейно-гистерезисного регулятора 11. Три фазных выхода блока формирования задания мгновенных значений напряжения 12 соединены с первыми положительными входами трех соответствующих релейно-гистерезисных регуляторов напряжения 13, вторые отрицательные входы которых соединены с соответствующими выходами датчиков фазных напряжений 6. Выходы трех релейно-гистерезисных регуляторов напряжения 13 подключены к управляющим входам тиристоров соответствующих фаз анодной группы инвертора 3, а также к соответствующим входам логических элементов «НЕ» 14. Выходы логических элементов «НЕ» 14 подключены к управляющим входам тиристоров соответствующих фаз катодной группы инвертора 3.
К выходам нерегулируемого выпрямителя 2 подключен фильтрующий конденсатор 15. К катодному выходу выпрямителя 2, подключен анодный вывод первого полностью управляемого вентиля 16, выполненного, например, на базе GTO - тиристора, катодный вывод которого подключен к первому выводу реактора 4. К точке соединения первого вывода реактора с катодным выводом первого управляемого вентиля 16 подключен анод диода 17, катод которого подключен к анодному выходу выпрямителя 2. Катодный выход второго полностью управляемого вентиля 18, выполненного, например, на базе GTO - тиристора, подключен к катодному выходу инвертора 3.
Блок задания напряжения 19 двигателя первым амплитудным выходом 20 через сумматор 21 соединен с первый входом блока формирования задания мгновенных значений напряжения 12. Второй частотный выход 22 блока задания напряжения 19 соединен с вторым входом блока формирования задания мгновенных значений напряжения 12. Третий выход 23 блока задания напряжения 19, задающий установившееся значение частоты напряжения статора, соединен с первым положительным входом пятого релейного регулятора 24, второй отрицательный вход которого соединен с частотным выходом 22 блока задания напряжения 19. Блок задания напряжения 19 амплитудным выходом 20 соединен также с первым положительным входом шестого релейного регулятора 25. Выходы датчиков фазных напряжений 6 соединены с соответствующими входами блока определения амплитуды напряжения 26, выход которого соединен с вторым отрицательным входом шестого релейного регулятора 25.
Выход четвертого релейно-гистерезисного регулятора 11 соединен с одним силовым выводом первого управляемого переключающегося ключа 27, другой силовой вывод которого соединен с источником логического сигнала «1», третий общий силовой вывод первого управляемого переключающегося ключа 27 соединен с управляющим электродом полностью управляемого вентиля 16. Управляющий вход первого управляемого ключа 27 соединен с выходом пятого релейного регулятора 24. Выход шестого релейного регулятора 25 соединен с одним входом логического блока «И» 28. Первый положительный вход седьмого релейного регулятора 29 подключен к блоку 30 задания предельно допустимой величины тока через реактор iДОП. К второму отрицательному входу седьмого релейного регулятора 29 подключен выход датчика тока 34. Выход релейного регулятора 29 соединен с другим входом логического блока «И» 28, выход которого подключен к управляющему электроду второго полностью управляемого вентиля 18. Выход пятого релейного регулятора 24 соединен также с входом логического элемента «НЕ» 31, выход которого соединен с третьим входом логического блока «И» 28.
Выход узла сравнения 10 соединен также с входом блока 32 расчета сигнала коррекции напряжения, выход которого соединен с одним силовым выводом второго управляемого ключа 33, второй силовой вывод которого соединен с вторым входом сумматора 21. Управляющий вход второго управляемого ключа 33 соединен с выходом пятого релейного регулятора 24.
Первый силовой вывод датчика тока 34 соединен с вторым выводом реактора 4, второй силовой вывод датчика тока 34 подключен к аноду второго управляемого вентиля 18 и первому выводу размыкающегося контакта 35, второй вывод которого подключен к анодному входу инвертора 3. Вывод первой фазной обмотки ротора двигателя 1 соединен с одним выводом размыкающегося контакта 36, другой вывод которого соединен с выводом второй фазной обмотки ротора, вывод третьей фазной обмотки ротора соединен с одним выводом размыкающегося контакта 37, другой вывод которого соединен с выводом второй фазной обмотки ротора. Вывод второй фазной обмотки ротора соединен также с одним выводом замыкающегося контакта 38, второй вывод которого соединен с анодом диода 39. Вывод третьей фазной обмотки ротора соединен также с одним выводом замыкающегося контакта 40, второй вывод которого соединен с анодом диода 41. Катоды диодов 39 и 41 соединены в общую точку. Первый вывод размыкающегося контакта 35 соединен также с первым выводом замыкающегося контакта 42, второй вывод которого соединен с выводом первой фазной обмотки ротора двигателя 1. Второй вывод размыкающегося контакта 35 соединен также с первым выводом замыкающегося контакта 43, второй вывод которого соединен с точкой соединения катодов диодов 39 и 41.
Способ управления асинхронным двигателем с фазным роторов данном устройстве осуществляется следующим образом. В режиме пуска контакты 35, 36 и 37 замкнуты, контакты 38, 40, 42 и 43 разомкнуты, асинхронный двигатель 1 работает при закороченном роторе.
Блок формирования задания мгновенных значений напряжения 12 преобразует сигналы задания на амплитуду  и частоту
и частоту  напряжения двигателя в три синусоидальных сигнала задания на фазные напряжения двигателя
напряжения двигателя в три синусоидальных сигнала задания на фазные напряжения двигателя 

 по формуле:
по формуле:
где t - текущее время.
Синусоидальные сигналы задания на фазные напряжения двигателя 

 поступают на входы релейно-гистерезисных регуляторов напряжения 13, в которых вычисляются разницы между заданными и фактическими значениями мгновенных фазных напряжений двигателя Δu1A, Δu1B, Δu1C по формуле:
поступают на входы релейно-гистерезисных регуляторов напряжения 13, в которых вычисляются разницы между заданными и фактическими значениями мгновенных фазных напряжений двигателя Δu1A, Δu1B, Δu1C по формуле:
Состояние выходов релейно-гистерезисных регуляторов QA, QB, QC определяется по следующему алгоритму:
где h - модуль гистерезиса, который принимается равным 5…10% от амплитуды номинального напряжения двигателя.
На основании установки в релейно-гистерезисных регуляторах модуля гистерезиса h определяются граничные значения напряжения - верхнее и нижнее, в пределах которых должно находиться напряжение соответствующей фазы двигателя в любой момент времени.
При нарушении верхней границы автономный инвертор тока формирует отрицательный импульс тока, который разряжает конденсатор соответствующей фазы батареи конденсаторов, тем самым понижая напряжение на нем. В случае нарушения нижней границы формируется положительный импульс тока, конденсатор фазы заряжается, повышая напряжение соответствующей фазы двигателя.
В исходном состоянии ключ 27 находится в положении 1, через него на управляющий электрод первого управляемого вентиля 16 подается от источника логический сигнал «1», и этот вентиль будет открыт при наличии напряжения на выходе выпрямителя 1.
Управление первым полностью управляемым вентилем 16 в режиме пуска двигателя осуществляется следующим образом. Полученный с выхода блока 9 сигнал задания тока статора  поступает на положительный вход узла сравнения 10, на отрицательный вход которого поступает сигнал обратной связи от блока 8, рассчитывающего амплитуду тока статора I1. Амплитуда тока статора I1 вычисляется в блоке 8 по формуле:
поступает на положительный вход узла сравнения 10, на отрицательный вход которого поступает сигнал обратной связи от блока 8, рассчитывающего амплитуду тока статора I1. Амплитуда тока статора I1 вычисляется в блоке 8 по формуле:

где i1A, i1B - мгновенные значения токов фаз А и В двигателя.
Сигнал рассогласования

с выхода узла сравнения 10 поступает на вход релейно-гистерезисного регулятора тока 11, на выходе которого формируется QPT1 по следующему алгоритму:

где δ - модуль гистерезиса, который принимается равным 5…10% от амплитуды номинального тока двигателя.
Если разность сигналов ΔI1 на входе релейного регулятора тока 11 меньше установленного порогового уровня δ/2 или отрицательна, то на выходе релейно-гистерезисного регулятора тока 11 формируется логический сигнал QPT1=0. Если разность сигналов на входе релейного регулятора тока 11 положительна и больше установленного порогового уровня, то на его выходе сигнал QPT1=1.
При пуске двигателя на первый и второй вход пятого релейного регулятора 24 с формирователя 19 с выходов 23 и 22 поступают сигналы заданного установившегося значения частоты частоту  и текущего значения частоты
и текущего значения частоты  который в процессе пуска плавно нарастает от начального значения до установившегося
который в процессе пуска плавно нарастает от начального значения до установившегося  Сигнал рассогласования определяется
Сигнал рассогласования определяется

Состояние выхода релейного регулятора 24 определяется по следующему алгоритму:

Поэтому в течение всего времени нарастания частоты, пока  и
и  на выходе релейного регулятора 24 будет логический сигнал «1». Этот логический сигнал поступает на управляющие входы ключей 27 и 34.
на выходе релейного регулятора 24 будет логический сигнал «1». Этот логический сигнал поступает на управляющие входы ключей 27 и 34.
При этом ключ 27 переводится в положении 2, и выход релейно-гистерезисного регулятора 11 соединяется с управляющим входом вентиля 16. Включение и выключение вентиля 16 будет выполняться в соответствии с значением логического сигнала на выходе релейно-гистерезисного регулятора 11.
Если сигнал на выходе релейно-гистерезисного регулятора тока 11 QPT1=1, то этот сигнал поступает через закрытый ключ 27 на управляющий электрод управляемого вентиля 16, который включается, и через него протекает выпрямленный ток. При включенном состоянии управляемого вентиля 16, выпрямленный ток протекает от катодной группы выпрямителя 1, через вентиль 16, реактор 4, датчик тока 34, закрытый контакт 35, анодную группу вентилей инвертора 3, обмотки статора двигателя 1, катодную группу вентилей инвертора 3, к анодной группе выпрямителя 1.
Если сигнал QPT1=0, управляемый вентиль 16 выключен, и ток протекает через реактор 4, датчик тока 34, закрытый контакт 35, анодную группу вентилей инвертора 3, обмотки статора двигателя 1, катодную группу вентилей инвертора 3, обратный диод 17.
Таким образом, первый полностью управляемый вентиль 16 в звене постоянного тока, работающий в режиме периодического включения и выключения со скважностью, задаваемой релейным регулятором тока 11, регулирует ток, поступающий на вход инвертора 3, при этом энергия от нерегулируемого выпрямителя передается через реактор 4 и инвертор 3 к двигателю дозировано в необходимом количестве.
Когда выполнится условие  на выходе релейного регулятора 24 будет логический сигнал «0», ключ 27 перейдет в положение 1 и на управляющий электрод вентиля 16 будет поступать логический сигнал «1», вентиль 16 будет все время открыт.
на выходе релейного регулятора 24 будет логический сигнал «0», ключ 27 перейдет в положение 1 и на управляющий электрод вентиля 16 будет поступать логический сигнал «1», вентиль 16 будет все время открыт.
Сигнал скорректированного задания напряжения двигателя  определяется на выходе сумматора 21 как сумма выходного сигнала
определяется на выходе сумматора 21 как сумма выходного сигнала поступающего от блока 19 с выхода 20, и корректирующего сигнала UКУ, выработанного в блоке 32 и переданного через контакт 33.
поступающего от блока 19 с выхода 20, и корректирующего сигнала UКУ, выработанного в блоке 32 и переданного через контакт 33.

Ключ 33 будет замкнут, если сигнал  будет больше нуля, и на выходе релейного регулятора 24 будет логический сигнал «1», тогда через ключ 33 на сумматор 21 подается сигнал коррекции напряжения задания.
будет больше нуля, и на выходе релейного регулятора 24 будет логический сигнал «1», тогда через ключ 33 на сумматор 21 подается сигнал коррекции напряжения задания.
Корректирующий сигнал определяется в блоке расчета 32, на вход которого поступает разность ΔI1 между заданным и измеренным значениями амплитуды пускового тока, по формуле

где к - коэффициент, определяемый в процессе настройки электропривода.
После достижения частотой напряжения статора заданного установившегося значения, когда  на выходе регулятора 24 сформируется логический сигнал «0», который поступит на управляющий вход ключа 33, при этом размыкается силовой контакт ключа 33, коррекция напряжения статора прекращается. Размыкаются контакты 35, 36 и 37, замыкаются контакты 38, 40, 42 и 43, обмотки ротора включаются в звено постоянного тока преобразователя частоты, по обмоткам ротора двигателя начинает проходить постоянный ток и двигатель втягивается в синхронизм.
на выходе регулятора 24 сформируется логический сигнал «0», который поступит на управляющий вход ключа 33, при этом размыкается силовой контакт ключа 33, коррекция напряжения статора прекращается. Размыкаются контакты 35, 36 и 37, замыкаются контакты 38, 40, 42 и 43, обмотки ротора включаются в звено постоянного тока преобразователя частоты, по обмоткам ротора двигателя начинает проходить постоянный ток и двигатель втягивается в синхронизм.
В синхронном режиме скорость вращения ротора равна скорости вращения поля статора, асинхронный двигатель с фазным ротором имеет абсолютно жесткие механические характеристики, снижается потребление реактивной мощности по сравнению с асинхронным режимом. Поскольку на обмотках ротора происходит падение напряжения, то для повышения напряжения на обмотках статора двигателя начинают коммутировать второй полностью управляемый вентиль 18. Управление вторым полностью управляемым вентилем 18 осуществляется следующим образом.
В режиме пуска двигателя на выходе релейного регулятора 24 будет логический сигнал «1», на выходе логического элемента «НЕ» 31 будет сигнал «0», и на выходе логического блока «И» 28 формируется сигнал «0», второй управляемый вентиль 18 будет закрыт.После достижения частотой напряжения статора установившегося значения, на выходе релейного регулятора 24 формируется логический сигнал «0», поступающий на инвертирующий блок «НЕ» 31, с выхода этого блока логический сигнал «1» поступает на вход логического блока «И» 28.
На входе шестого релейно-гистерезисного регулятора 25 определяется разность ΔU между амплитудным значением заданного напряжения двигателя  поступающим на его первый положительный вход, и амплитудным значением напряжения двигателя U1, поступающим на его второй отрицательный вход
поступающим на его первый положительный вход, и амплитудным значением напряжения двигателя U1, поступающим на его второй отрицательный вход

Состояние выхода релейно-гистерезисного регулятора 25 определяется по следующему алгоритму:

где τ - модуль гистерезиса, который принимается равным 5…10% от амплитуды номинального напряжения двигателя.
Выходной логический сигнал релейно-гистерезисного регулятора 25 поступает на другой вход логического блока «И» 28. Если  на втором входе логического блока «И» 28 будет логический сигнал «1».
на втором входе логического блока «И» 28 будет логический сигнал «1».
На входе седьмого релейно-гистерезисного регулятора тока 29 определяется разность между заданным предельно допустимым током через реактор iДОП и измеренным с помощью датчика тока 34 протекающим через реактор током iР,

Состояние логического выходного сигнала седьмого релейного регулятора 29 QPT2 определяется по следующему алгоритму:

где δ - модуль гистерезиса, который принимается равным 8…10% от амплитуды номинального тока двигателя.
Если разность сигналов ΔiP на входе релейно-гистерезисного регулятора 29 меньше установленного порогового уровня δ/2 или отрицательна, то на выходе релейного регулятора 29 формируется логический сигнал QPT2=0, а если ΔiP>δ/2, то QPT2=1.
Выходной логический сигнал релейно-гистерезисного регулятора 29 поступает на третий вход логического блока «И» 28.
Второй полностью управляемый вентиль 18 будет включен, если все три логических сигнала на входе логического блока 28 «И» равны «1», тогда на его выходе формируется единичный логический сигнал QP=1.
Таким образом, второй полностью управляемый вентиль 18 включается при условии выполнения трех условий:
1) текущая частота задания напряжения  становится равной заданному установившемуся значению частоты
становится равной заданному установившемуся значению частоты 
2) амплитуда задания напряжения  превышает амплитуду напряжения двигателя U1 на величину, превышающую зону гистерезиса τ;
превышает амплитуду напряжения двигателя U1 на величину, превышающую зону гистерезиса τ;
3) ток, протекающий через реактор 4 меньше предельно допустимого значения iДОП.
Если одно из трех условий не выполняется, и хотя бы один из трех логических
сигналов на входе логического блока 28 «И» равен «нулю», то на его выходе формируется единичный логический сигнал QP=0. При этом второй полностью управляемый вентиль 18 будет выключен.
При кратковременном включенном состоянии второго полностью управляемого вентиля 18 происходит быстрое увеличение тока, проходящего через реактор 4. Когда ток, протекающий через реактор 4, достигает предельно допустимого значения iДОП, второй полностью управляемый вентиль 18 выключается. При выключении второго полностью управляемого вентиля 18 выпрямленный ток вновь протекает через инвертор. За счет наведенной при изменении тока в реакторе 4 ЭДС самоиндукции, которая суммируется с напряжением на выходе выпрямителя 2, увеличивается результирующее напряжение, подводимое к входу инвертора 3. В результате возрастает результирующее напряжение на выходе инвертора 3, подаваемое на статор двигателя 1. При снижении тока, протекающего через реактор 4, до нижнего порогового значения, снова включается второй полностью управляемый вентиль 18. Процесс включения и выключения второго полностью управляемого вентиля 18 имеет циклический характер.
Предложенный способ управления асинхронным двигателем с фазным ротором с помощью преобразователя частоты с двумя дополнительными полностью управляемыми вентилями в звене постоянного тока позволяет поддерживать постоянство пускового тока и стабилизировать пусковой момент двигателя за счет коррекции сигнала задания на напряжение статора двигателя, и регулировать с помощью коммутаций первого полностью управляемого вентиля, последовательно включенного в звено постоянного тока преобразователя частоты, количество энергии, поступающее от выпрямителя к инвертору. В установившемся режиме осуществляется питание обмоток ротора постоянным током и перевод двигателя в синхронный режим. С помощью коммутаций второго полностью управляемого вентиля, включенного параллельно входу инвертора, возникающую в реакторе ЭДС самоиндукции суммируют с напряжением сети, что позволяет компенсировать падение напряжения на обмотках ротора двигателя. В синхронном режиме формируются абсолютно жесткие механические характеристики электропривода, уменьшается потребление статором реактивной мощности, за счет чего снижается величина тока статора при заданной статической нагрузке.
Список литературы.
1. Патент RU №2099850 МПК Н02Р 7/63. Способ асинхронным двигателем с фазным ротором. Опубл. 20.12.1997. Бюл. №35.
2. Патент RU №2724982. МПК Н02Р 25/02. Способ управления электроприводом переменного тока. Опубл. 29.06.2020. Бюл. №19.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом переменного тока | 2019 |
|
RU2724982C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2015 |
|
RU2606643C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2019 |
|
RU2760393C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2456742C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2013 |
|
RU2539347C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОНОМНЫМ АСИНХРОННЫМ ГЕНЕРАТОРОМ | 2021 |
|
RU2761868C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 1996 |
|
RU2115218C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХФАЗНЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА С ПОМОЩЬЮ ТРЕХФАЗНОГО МОСТОВОГО ИНВЕРТОРА | 2018 |
|
RU2682242C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2362264C1 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
Изобретение относится к электротехнике, в частности к системам управления электроприводами переменного тока с преобразователями частоты. Технический результат заключается в получении в установившемся режиме абсолютно жестких механических характеристик, уменьшении потребления тока статора при заданной статической нагрузке, стабилизации пускового тока и пускового момента двигателя. В способе управления при пуске согласованно регулируют амплитуду и частоту напряжения двигателя с помощью релейных регуляторов напряжения, определив амплитуду тока двигателя, корректируют сигнал задания амплитуды напряжения. С помощью релейного регулятора и логических блоков периодически включают и выключают первый полностью управляемый вентиль, расположенный в звене постоянного тока между выпрямителем и реактором, и дозированно передают энергию от нерегулируемого выпрямителя через реактор и инвертор к двигателю. При отключении вентиля создают цепь для протекания тока за счет введенного в звено постоянного тока обратного диода, при переводе двигателя в синхронный режим подключают обмотки ротора к звену постоянного тока преобразователя частоты. Для компенсации падения напряжения на обмотках ротора и при недостаточной величине напряжения на входе выпрямителя для получения требуемого напряжения двигателя периодически с помощью релейных регуляторов и логических блоков включают и выключают второй полностью управляемый вентиль, установленный согласно параллельно входу инвертора, и за счет увеличения тока, проходящего через сглаживающий реактор при включенном состоянии второго вентиля, и прибавления в выпрямленному напряжению ЭДС самоиндукции реактора при отключенном состоянии второго вентиля увеличивают напряжение двигателя. 1 ил.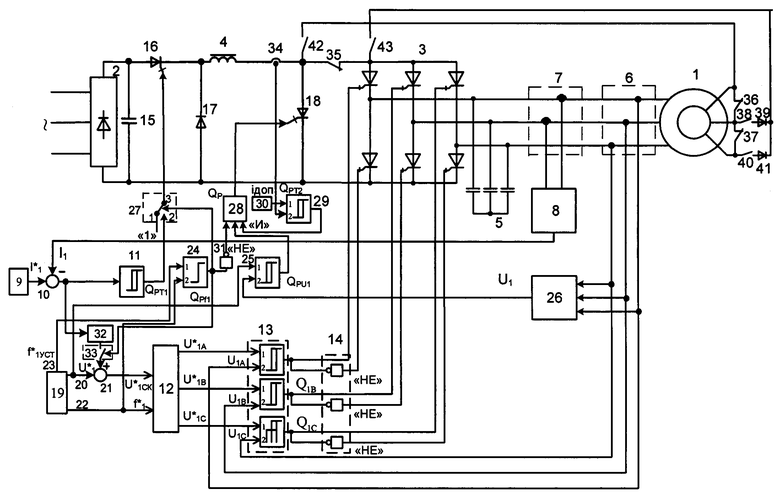
Способ управления асинхронным двигателем с фазным ротором с помощью преобразователя частоты со звеном постоянного тока, содержащего выпрямитель и автономный инвертор тока, выполненный на полностью управляемых вентилях, в котором к катодному выходу выпрямителя подключен анод первого полностью управляемого вентиля, катод которого подключен к первому выводу реактора, второй вывод которого подключен к первому выводу датчика тока, при котором в режиме пуска замыкают выходы трехфазной обмотки ротора накоротко, создают электрическую цепь между вторым силовым выводом датчика тока и анодным входом инвертора, фильтруют высокочастотные составляющие токов на выходе преобразователя частоты, фильтруют с помощью конденсатора выпрямленное нерегулируемое напряжение на выходе выпрямителя, измеряют мгновенные значения фазных напряжений и фазных токов статора двигателя, вычисляют амплитуду тока и амплитуду напряжения двигателя, формируют заданные частоту и амплитуду трехфазного переменного напряжения статора двигателя, на основе сформированных сигналов частоты и амплитуды трехфазного переменного напряжения двигателя, формируют три синусоидальных сигнала задания на фазные напряжения двигателя, смещенные относительно друг друга на 2π/3, которые подают на первые входы трех релейно-гистерезисных регуляторов напряжений соответствующих фаз двигателя, на вторые входы релейно-гистерезисных регуляторов напряжений подают измеренные мгновенные значения напряжений соответствующих фаз, управляющие логические сигналы с выходов трех релейно-гистерезисных регуляторов напряжений двигателя подают на управляющие входы тиристоров соответствующих фаз анодной группы инвертора, а также на входы логических элементов «НЕ» соответствующих фаз, с выходов которых управляющие логические сигналы подают на управляющие входы тиристоров соответствующих фаз катодной группы инвертора, на выходе четвертого релейно-гистерезисного регулятора формируют логический сигнал, который подают на управляющий электрод первого полностью управляемого вентиля, при выключенном состоянии первого полностью управляемого вентиля отключают первый вывод реактора от выпрямителя, при этом обеспечивают непрерывность тока в звене постоянного тока с помощью обратного диода, установленного между катодным выходом выпрямителя и первым выводом реактора, при включенном состоянии первого полностью управляемого вентиля подключают первый вывод реактора к выпрямителю, с помощью пятого релейного, шестого и седьмого релейно-гистерезисных регуляторов формируют сигналы на включение и отключение второго полностью управляемого вентиля, катод которого соединен с катодным входом инвертора, а анод соединен с вторым силовым выводом датчика тока, включают и выключают второй полностью управляемый вентиль, при его включенном состоянии шунтируют входную цепь инвертора и увеличивают ток, проходящий через реактор, при его выключенном состоянии прибавляют к выпрямленному напряжению наведенную в реакторе ЭДС и подают суммарное напряжение на вход инвертора, подают на первый вход шестого релейно-гистерезисного регулятора сигнал задания амплитуды напряжения статора, измеренное амплитудное значение напряжения статора двигателя подают на второй вход шестого релейно-гистерезисного регулятора, логический сигнал с выхода которого подают на один вход логического элемента «И», на первый вход седьмого релейного регулятора подают значение максимально допустимого тока через реактор, измеряют значение тока через реактор и подают это значение на второй вход седьмого релейного регулятора, логический сигнал с выхода которого подают на другой вход логического элемента «И», логический сигнал с выхода которого подают на управляющий вход второго полностью управляемого вентиля, отличающийся тем, что в режиме пуска задают амплитудное значение пускового тока статора, сравнивают его с вычисленным амплитудным значением пускового тока статора и определяют величину рассогласования между этими сигналами, которую подают на вход четвертого релейно-гистерезисного регулятора, и формируют логический сигнал на его выходе, также преобразуют величину рассогласования заданного и вычисленного амплитудных значений пускового тока статора в сигнал коррекции амплитуды напряжения статора, который складывают с сигналом заданной амплитуды трехфазного переменного напряжения статора, полученный суммарный сигнал амплитуды напряжения статора используют при формировании уточненных сигналов задания на фазные напряжения статора, на первый вход пятого релейного регулятора подают сигнал заданного установившегося значения частоты статора, на второй вход пятого релейного регулятора подают сигнал текущего заданного значения частоты статора, формируют логический сигнал на выходе пятого релейного регулятора, при пуске разрешают включение и отключение первого полностью управляемого вентиля, на третий вход логического элемента «И» подают через логический элемент «НЕ» сигнал с выхода пятого релейного регулятора и запрещают включение второго полностью управляемого вентиля в процессе пуска, после достижения сигналом задания частоты установившегося значения и окончания процесса пуска двигателя прекращают корректировать сигнал задания амплитуды напряжения статора, переводят первый полностью управляемый вентиль в постоянно включенное состояние, размыкают электрическую цепь между вторым силовым выводом датчика тока и анодным входом инвертора, разрывают цепь соединения фазных обмоток ротора, подключают обмотки ротора к звену постоянного тока преобразователя частоты, для чего подключают вывод одной обмотки к второму силовому выводу датчика тока, подключают вывод другой обмотки ротора к аноду одного диода, катод которого соединен с катодом другого диода, анод другого диода подключают к выводам третьей обмотки ротора, катоды обоих диодов подключают к анодному входу инвертора, разрешают включение и отключение второго полностью управляемого вентиля.
| Способ управления электроприводом переменного тока | 2019 |
|
RU2724982C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2362264C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2456742C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ С ФАЗНЫМ РОТОРОМ | 1996 |
|
RU2099850C1 |
| CN 111211721 A, 29.05.2020. | |||

