Изобретение относится к электротехнике, а именно к системам управления электроприводами переменного тока с преобразователями частоты (ПЧ), и может быть использовано при работе на пониженных скоростях вращения исполнительного двигателя.
Известен способ управления электроприводом переменного тока путем формирования фазных токов на выходах ПЧ с последовательно соединенными первым управляемым выпрямителем-инвертором (ВИ), сглаживающим реактором и вторым управляемым ВИ, при котором регулирует выпрямленный ток на выходе первого ВИ, подключенного зажимами переменного напряжения к источнику (питающей сети), и производят переключение вентилей второго ВИ, подключенного зажимами переменного напряжения к обмоткам электродвигателя, в соответствии с требуемым распределением фазных токов (пространственным положением изображающего вектора тока) [1].
Первый и второй ВИ выполнены на основе обычных полууправляемых тиристоров.
Выпрямленный ток на выходе первого ВИ регулируют в жестком соотношении с необходимой амплитудой основной гармоники токов статора (модулем изображающего вектора тока статора). Трехфазный мостовой ВИ обеспечивает шесть возможных пространственных положений вектора тока и переключение второго ВИ осуществляется шесть раз за период токов статора. Модуль и пространственное положение вектора тока статора задают таким образом, чтобы обеспечивались необходимый момент и необходимое энергетическое состояние электропривода.
Недостатком указанного известного решения является то, что при пониженной скорости электропривода первый ВИ работает с пониженным выпрямленным напряжением и увеличенным углом управления. Это определяет пониженный коэффициент мощности на входе электропривода и повышенное содержание гармоник в токах, потребляемых от сети.
Другим недостатком является то, что токи статора имеют повышенное содержание высших гармоник, что повышает потери энергии в двигателе. Кроме того, на низких скоростях увеличен интервал дискретности во времени для системы управления второго ВИ, что препятствует высококачественному регулированию скорости.
Наиболее близким к предложенному является способ управления электроприводом переменного тока путем формирования токов на выходах ПЧ с последовательно соединенными первым ВИ, сглаживающим реактором и вторым ВИ, выполненным на полностью управляемых вентилях, при котором регулируют выпрямленный ток на выходе первого ВИ, подключенного зажимами переменного напряжения к источнику (питающей сети), и производят переключение вентилей второго ВИ, подключенного зажимами переменного напряжения к обмоткам двигателя, с использованием широтно-импульсной модуляции (ШИМ) и в соответствии с требуемым распределением фазных токов (пространственным положением изображающего вектора тока). Высокочастотные составляющие выходных токов второго ВИ замыкаются через трехфазную конденсаторную батарею, подключенную к обмоткам двигателя [2].
К недостаткам указанного известного решения относятся пониженный коэффициент мощности и повышенное содержание гармоник в токах, потребляемых от питающей сети.
Предложенный способ управления решает задачи повышения коэффициента на входе электропривода от питающей сети, а также улучшения гармонического состава токов, потребляемых электроприводом как от питающей сети, так и в обмотках двигателя переменного тока при пониженных скоростях.
Указанная задача решается тем, что при известном способе управления электроприводом переменного тока путем формирования токов на выходах ПЧ, питающего электродвигатель и выполненного с двумя ВИ, один или два из которых на полностью управляемых вентилях, соединенными между собой через сглаживающий реактор, при котором регулируют выпрямленный ток в зависимости от требуемой амплитуды гладких составляющих токов на выходе ПЧ, переключают вентили каждого ВИ в зависимости от заданного для него распределения токов в проводах переменного тока и фильтруют высокочастотные составляющие токов на выходе ПЧ, переключение вентилей каждого ВИ на полностью управляемых вентилях производят также в зависимости от заданной амплитуды гладких составляющих токов в его проводах переменного тока и раздельно от выпрямленного тока.
В соответствии с изобретением ВИ на полностью управляемых вентилях может быть использован для формирования токов в обмотках электродвигателя либо для преобразования токов от питающей сети на входе ПЧ, либо для обеих задач совместно.
Возможность раздельного регулирования выпрямленного тока и амплитуды гладких составляющих в проводах переменного тока ВИ на полностью управляемых вентилях обеспечивает повышение коэффициента мощности электропривода при пониженных скоростях.
В соответствии с изобретением управляющие сигналы для переключения вентилей каждого из ВИ на полностью управляемых вентилях могут быть образованы в виде отношений заданных мгновенных значений гладких составляющих фазных токов в проводах переменного тока указанного ВИ к измеренному значению выпрямленного тока.
При этом обеспечивается повышение коэффициента мощности на входе электропривода при пониженных скоростях и дополнительно уменьшается влияние пульсаций выпрямленного тока на токи двигателя.
В соответствии с предложенным способом задания для токов в проводах переменного тока каждого из ВИ на полностью управляемых вентилях могут быть сформированы по результатам сравнений заданных и фактических напряжений на его зажимах переменного тока.
При этом обеспечивается повышение качества регулирования электропривода за счет повышения быстродействия контуров регулирования момента и скорости.
В соответствии с изобретением управляющие сигналы для вентилей каждого из ВИ на полностью управляемых вентилях могут быть сформированы по результатам сравнения модулирующего сигнала в виде однополярного сигнала треугольной формы с полученными отношениями заданных мгновенных значений гладких составляющих токов в проводах переменного тока к измеренному значению выпрямленного тока. При этом в каждый момент времени определяют наибольший, наименьший и промежуточный управляющий сигналы пи реализуют следующий алгоритм:
- при превышении наибольшего управляющего сигнала уровня модулирующего сигнала в анодной группе указанного ВИ включают вентиль той фазы, который соответствует наибольшему управляющему сигналу,
- при недостижении наибольшего управляющего сигнала уровня модулирующего сигнала в анодной группе указанного ВИ включают вентиль той фазы, который соответствует промежуточному управляющему сигналу,
- при превышении наименьшего управляющего сигнала уровня модулирующего сигнала взятого с обратным знаком, в катодной группе указанного ВИ включают вентиль той фазы, который соответствует промежуточному управляющему сигналу,
- при недостижении наименьшего управляющего сигнала уровня модулирующего сигнала, взятого с обратным знаком, в катодной группе указанного ВИ включается вентиль той фазы, который соответствует наименьшему управляющему сигналу.
Указанный алгоритм обеспечивает соответствие амплитуд гладких составляющих токов в проводах переменного тока заданным значениям независимо от значения выпрямленного тока.
В соответствии с изобретением при использовании ВИ на полностью управляемых вентилях для питания обмоток электродвигателя, выпрямленный ток регулируют также в зависимости от заданного уровня выходного активного напряжения указанного ВИ, при этом определяют отношение выпрямленного тока к необходимой амплитуде гладких составляющих фазных токов, поддерживают указанное отношение минимальным в зоне малых выходных напряжений, соответствующих низким скоростям электропривода, а при превышении определенного граничного уровня выходного активного напряжения увеличивают указанное отношение по мере возрастания выходного активного напряжения над этим граничным уровнем.
Это обеспечивает уменьшение необходимого выпрямленного напряжения в зоне высоких скоростей и следовательно, уменьшение угла управления ВИ, питаемого от сети, в зоне низких скоростей.
В соответствии с изобретением граничный уровень выходного активного напряжения ВИ на полностью управляемых вентилях может быть установлен пропорциональным напряжению на входных зажимах переменного тока ПЧ.
При этом уменьшается необходимый запас по выпрямленному напряжению на случай возможного снижения напряжения на входных зажимах переменного напряжения ПЧ, что обеспечивает дополнительное повышение коэффициента мощности.
В соответствии с изобретением при использовании ВИ на полностью управляемых вентилях на входе ПЧ для преобразования токов питающей сети задания токов в проводах переменного тока указанного ВИ можно образовать по его активной и реактивной составляющим. Причем активную составляющую устанавливают пропорциональной измеренному выпрямленному току и заданному выпрямленному напряжению на выходе указанного ВИ, а реактивную составляющую устанавливают пропорциональной токам конденсаторов, подключенных к входным зажимам переменного напряжения ПЧ.
При этом обеспечивается близкий к единице коэффициент мощности на входе ПЧ и пониженное содержание гармоник в токах, потребляемых от сети.
На фиг. 1 приведен пример реализации предложенного способа управления электроприводом переменного тока с подключением обмоток электродвигателя к выходам ВИ на полностью управляемых вентилях; на фиг. 2 - пример реализации предложенного способа с подключением ВИ на полностью управляемых вентилях к обработкам электродвигателя и к питающей сети; на фиг. 3 - функциональная схема блока автоматического управления для электропривода фиг. 1; на фиг. 4 - функциональная схема блока логического сравнения; на фиг. 5 - функциональная схема дешифратора; на фиг. 6 - функциональная схема, реализующая зависимость выпрямленного тока от выходного активного напряжения для электропривода фиг. 1; на фиг. 7 - функциональная схема выходной части основного регулятора при формировании заданий составляющих напряжения статора электродвигателя; на фиг. 8 - пример выполнения блока автоматического управления для электропривода фиг. 2; на фиг. 9 - временные диаграммы для электропривода фиг. 1; на фиг. 10-13 - характеристики электроприводов по прототипу и реализованных по предложенному способу.
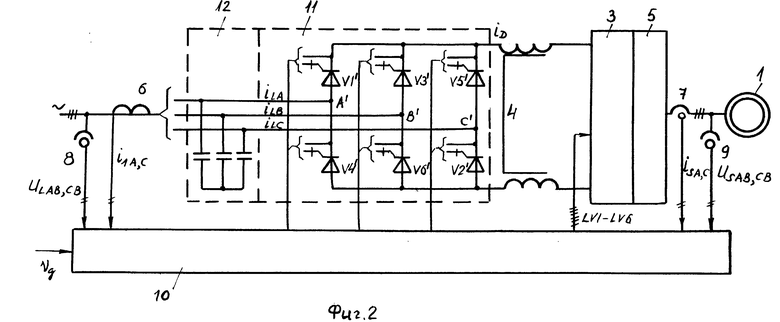
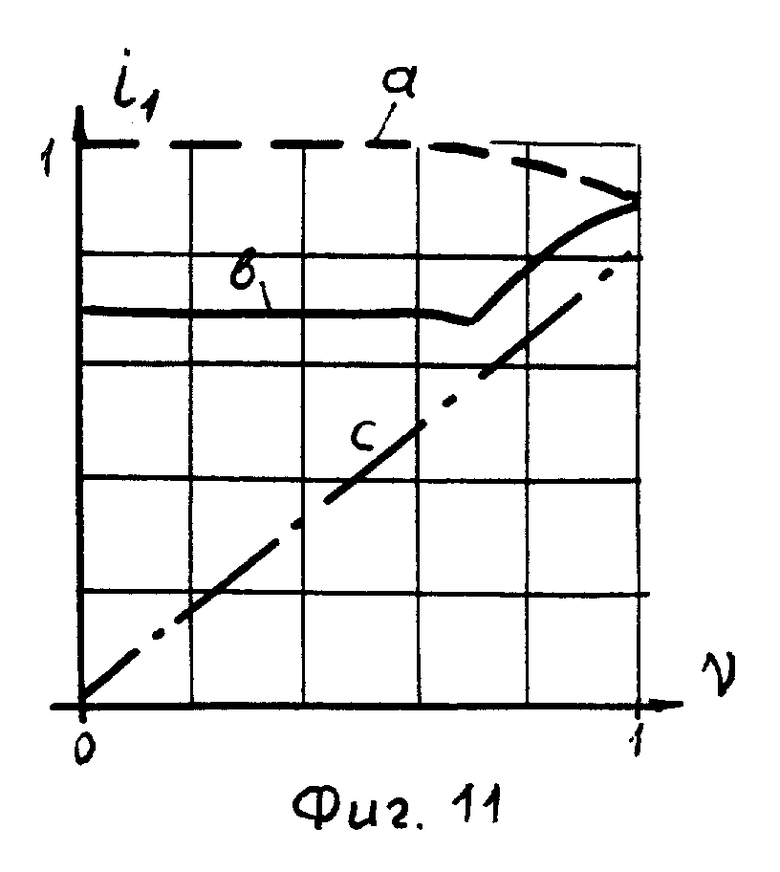
Электропривод по фиг. 1, реализующий предложенный способ управления, содержит электродвигатель 1, подключенный к выходам ПЧ с двумя ВИ (ВИ2, ВИ3), соединенными между через сглаживающий реактор 4. Один из ВИ (в представленном примере ВИ3) выполнен на полностью управляемых вентилях V1-V6, например на GTO-тиристорах. К выходам ВИЗ (к проводам переменного тока A, B, C) подключена конденсаторная батарея 5. На входах и выходах ПЧ установлены датчики тока 6,7 и датчики напряжения 8,9. Входы ВИ2 предназначены для подключения к питающей сети переменного тока.
Блок 10 автоматического управления подключен входами к выходам датчика тока 6, 7 и напряжения 8, 9, а выходами - к управляющим выходам вентилей ВИ3 и к входу системы импульсно-фазового управления (СИФУ) в составе ВИ2.
В электроприводе по фиг. 2 оба ВИ (ВИ3, ВИ11) выполнены на полностью управляемых вентилях (вентили в ВИ11 обозначены V1'-V6'). К проводам A', B', C' переменного тока ВИ11 подключена конденсаторная батарея 12.
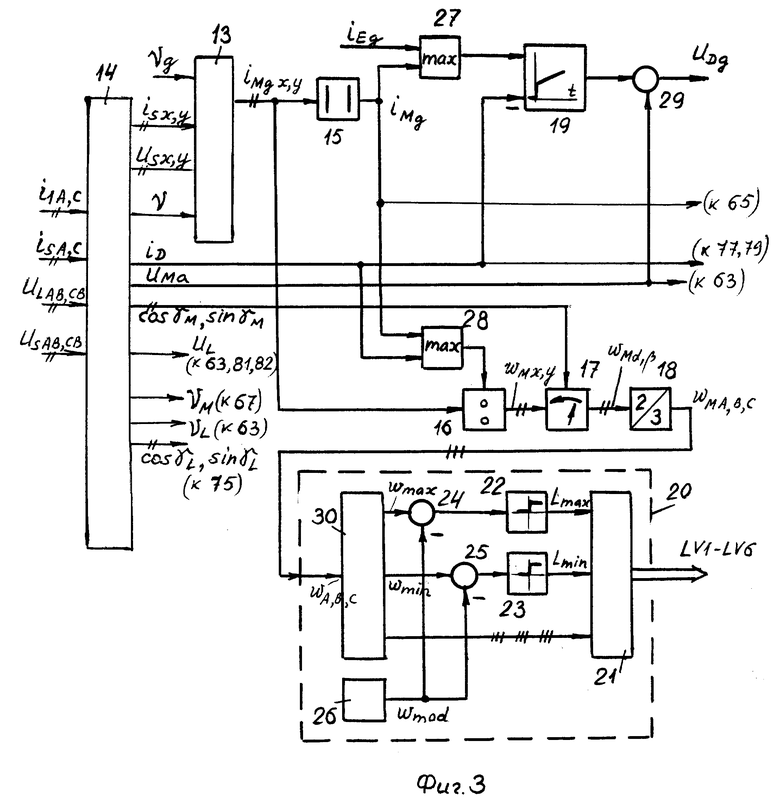
Блок 10 автоматического управления содержит регулятор 13 (фиг. 3), формирователь 14 сигналов обратной связи, элемент 15 вычисления модуля вектора, блок 16 делительных элементов, преобразователь 17 поворота вектора, преобразователь 18 числа фаз, регулятор 19 выпрямленного тока и широтно-импульсный модулятор 20, выполненный с дешифратором 21, двумя релейными элементами 22, 23, двумя суммирующими элементами 24, 25 и генератором 26 модулирующего сигнала треугольной формы Wmod.
При этом выходы регулятора 13 с заданиями составляющих тока iMgx, iMgy в ортогональной вращающейся (относительно оси α статора) системе координат x, y, подключены к входам элемента 15 вычисления iMg модуля вектора и к входам делимых блока 16 делительных элементов, соединенного выходами с входами преобразователя 17 поворота вектора, опорные входы по углу поворота которого подключены к выходам опорных гармонических сигналов cosγм,sinγм (по углу поворота γм ортогональной вращающейся системы координат x, y) формирователя 14 сигналов обратной связи, а выходы - к входам преобразователя 18 числа фаз, соединенного выходами с входами широтно-импульсного модулятор 20.
Вход обратной связи регулятора 19 выпрямленного тока подключен к соответствующему выходу iD формирователя 14 сигналов обратной связи, выходы регулятора 19 и широтно-импульсного, модулятора 20 образуют выходы блока 10 автоматического управления, подключенные соответственно к управляющим входам ВИ2 и ВИ3.
Реализация предложенного способа обеспечивается введение двух элементов 27, 28 выделения максимального сигнала с двумя входами каждый, суммирующего элемента 29, а также введением в широтно-импульсный модулятор 20 блока 30 логического сравнения.
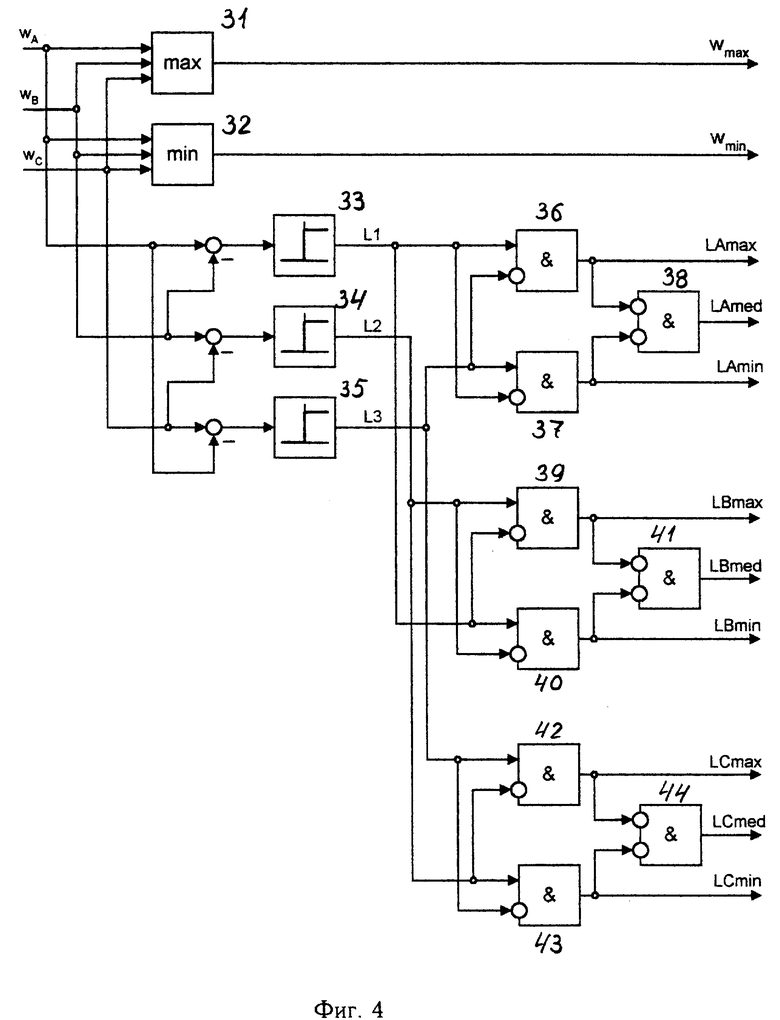
Блок 30 может быть выполнен с элементами 31, 32 (фиг. 4) выделения максимума и минимума, релейными элементами 33, 34, 35 и логическими элементами И 36-44.
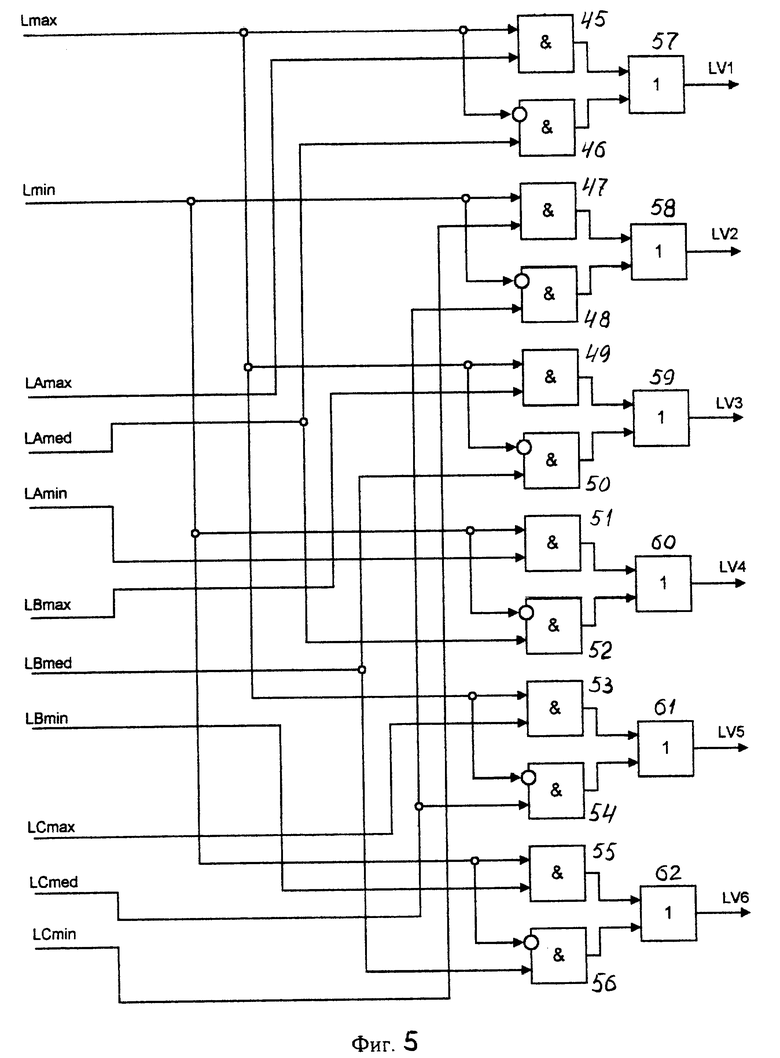
Дешифратор 21 может быть выполнен с логическими элементами И 45-56 (фиг. 5) и формирователями 57-62 сигналов открытия вентилей.
Формирователь 14 сигналов обратной связи известен в технике управляемого электропривода и описан, например, в [3]. Его входы соединены с выходами датчиков тока 6, 7 с сигналами i1A, i1C,; iSA, iSC соответственно и с выходами датчиков напряжения 8, 9 с сигналами ULAB, ULCB; USAB, USCB соответственно. На выходах формирователя 14 получают сигналы обратной связи по составляющим токов isx, isy и напряжений Usx, Usy, по выпрямленному току iD, напряжению сети UL, активному напряжению UMA, опорные сигналы cosγM,sinγM;cosγL,sinγL сигналы скоростей νM,νL,ν.
Основной регулятор 13 выполнен по известной схема, описанной например в [1].
Сигналы Wmax, Wmin на выходах блока 30 логического сравнения формируются по следующему алгоритму:
Wmax = max (WA, WB, WC),
Wmin = min (WA, WB, WC)/
Логические сигналы LAmax, LAmin для фазы A на выходах блока 30 соответствуют:
LAmax = 1 при WA > WB, WA > WC
LAmin = 1 при WA < WB, WA < WC,
в иных случаях LAmed = 1. Аналогичным образом формируются логические выходные сигналы LBmax, LBmed, LBmin для фазы B и сигналы LCmax, LCmed, LCmin для фазы C.
Выходной сигнал L1 элемента 33 (фиг. 4) равен 1 при WA - WB > 0, выходной сигнал L3 элемента 35 равен 1 при WC > WA.
Выходной сигнал LAmax элемента 36 равен 1 при L1 = 1 и L3 = 0, выходной сигнал LAmin элемента 37 равен 1 при L1 = 0 и L3 = 1.
В случае, когда оба сигнала LAmax и LAmin нулевые, логический сигнал 1 имеет место на выходе LAmed элемента 38.
Входной сигнал дешифратора 21 Lmax = 1 при условии Wmax > Wmod, входной сигнал Lmin = 1 при условии - Wmin > Wmod.
Сигнал для открытия вентиля V1 ВИ3 (фиг. 1) формируется в одном из двух случаев:
- когда сигнал WA является максимальным и он превышает модулирующий сигнал Wmod,
- когда сигнал WA является промежуточным, а максимальный из сигналов не превышает модулирующий сигнал.
Аналогичным образом формируются сигналы для открытия других вентилей ВИ3.
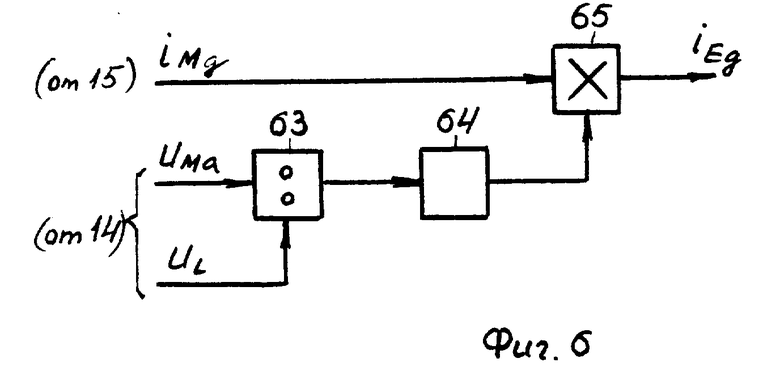
Формирование увеличенного значения iEg заданного выпрямленного тока в зависимости от выходного активного напряжения UMA ВИ3 осуществляется с помощью делительного элемента 63 (фиг. 6), пропорционального элемента 64 и множительного элемента 65.
На входы делимого и делителя элемента 63 поступают соответственно сигналы измеренного значения выходного активного напряжения UMA и модуль напряжения UL питающей сети с выходом формирователя 14.
Выход элемента 63 через пропорциональный элемент 64 соединен с одним из входов множительного элемента 65, на другой вход которого поступает задание выпрямленного тока iMg с выхода элемента 15 вычисления модуля вектора.
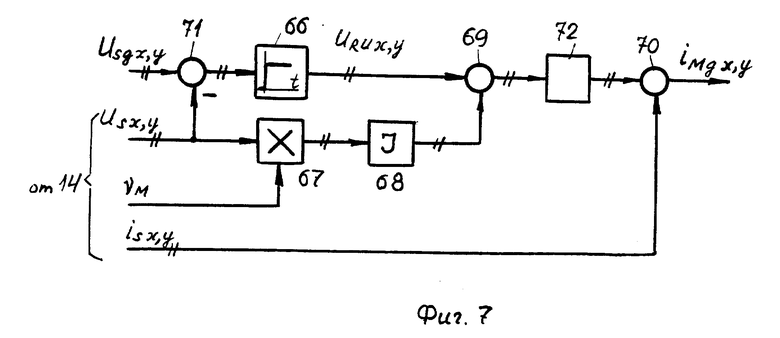
При формировании в основном регуляторе 13 заданий составляющих Usgx, Usgy напряжения статора двигателя во вращающейся системе координат x, y его выходная часть выполняется с блоком 66 регуляторов напряжения (фиг. 7), блоком 67 множительных элементов, блоком 68 поворота на 90o, блоками 69, 70, 71 суммирующих элементов, блоком 72 пропорциональных элементов.
Первые входы блока 71 суммирующих элементов предназначены для подачи заданных составляющих напряжения статора Usgx, Usgy, а другие входы - для сигналов обратной связи Usx, Usy с соответствующих выходов формирователя 14.
Выходы блока 71 подключены через блок 66 регуляторов напряжения к первым входам блока 69 суммирующих элементов, другие входы которого соединены с выходами блока 68. Выходы блока 68 подключены к выходам блока 67, входы которого соединены с соответствующими выходами Usx, Usy, γM формирователя 14.
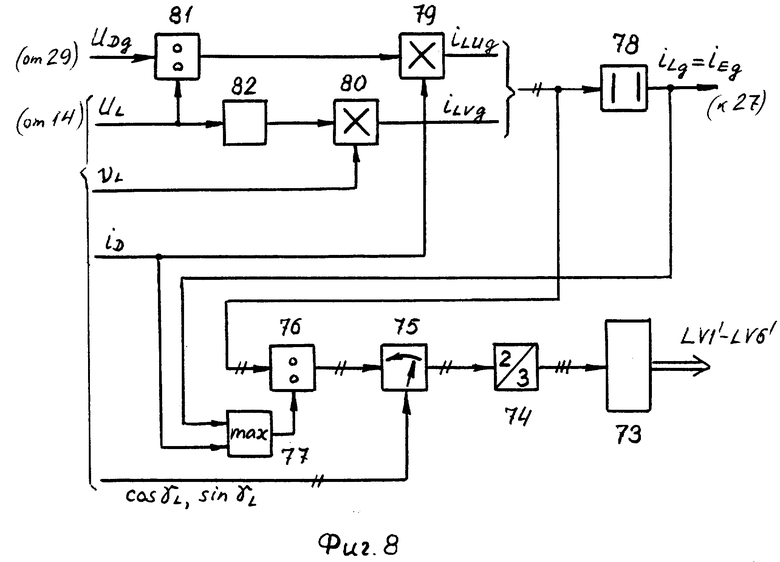
При реализации электропривода по фиг. 2, т.е. при выполнении ВИ11 и ВИ3 на полностью управляемых вентилях, блок 10 автоматического управления содержит дополнительно широтно-импульсный модулятор 73 (фиг. 3), преобразователь 74 числа фаз, преобразователь 75 поворота вектора, блок 76 делительных элементов, элемент 77 выделения максимального сигнала, элемент 78 вычисления модуля вектора, множительные элементы 79, 80, делительный элемент 81, пропорциональный элемент 82.
Широтно-импульсный модулятор 73 выполнен аналогично модулятору 20 (фиг. 3), его выходы предназначены для подключения к управляющим выводам вентилей ВИ11.
Входы модулятора 73 через преобразователи 74 и 75 подключены к выходам блока 76 делительных элементов. Опорные входы преобразователя 75 соединены с соответствующими выходами cosγL,sinγL формирователя 14 сигналов обратной связи.
Входы делимых блока 76 объединены с входами элемента 78 вычисления модуля вектора. Выход элемента 78 через элемент 77 соединен с входом делителя блока 76.
Выход элемента 78 с увеличенным значением заданного выпрямленного тока iEg предназначен для подключения к элементу 27 (фиг. 3).
Вход делимого UDg делительного элемента 81 соединен с выходом суммирующего элемента 29 (фиг. 3), а вход делителя, объединенный с входом пропорционального элемента 82, - с соответствующим выходом UL напряжения питающей сети формирователя 14.
Выходы элементов 81 и 82 через соответствующие множительные элементы 79, 80 подключены к входам элемента 78. Другие входы элементов 79, 80 соединены с выходами iD, VL формирователя 14 соответственно.
Все блоки и узлы выполнены на стандартных полупроводниковых элементах.
Электропривод по фиг. 1 функционирует следующим образом.
Сигнал νg на входе блока управления 10 или на входе регулятора 13 (фиг. 3) определяет заданное значение скорости. В регуляторе 13 сравнивается заданное и фактическое ν значение скоростей. В зависимости от их разности формируется заданный момент Mg.
В функции заданного момента, а также задаваемого (например, программно) магнитного потока ψg формируются задания токов iMgx, iMgy в ортогональной системе координат x, y.
Когда фактические токи iMx, iMy, поступающие с выходов формирователя 14, совпадают с заданными значениями, т.е.: imx = iMgx, imy = iMgy, фактические значения момента и магнитного потока также совпадают с заданными значениями, т.е.: M = Mg, ψ = ψg.
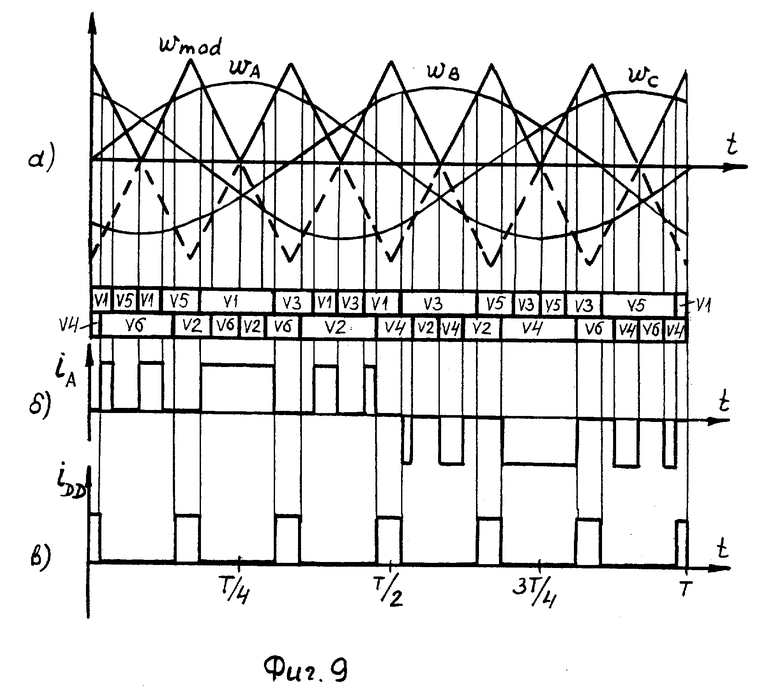
Сигналы WA, WB, WC (фиг. 9a) задают отношения гладких составляющих токов в проводах переменного тока ВИ3 к выпрямленному току iD. Включение полностью управляемых вентилей производится в результате сравнения этих сигналов друг с другом и с модулирующим сигналов Wmod, поступающим с выхода генератора 26.
Под диаграммой указанных сигналов на фиг. 9 показаны интервалы включения каждого из вентилей ВИ3, причем обозначения интервалов совпадают с обозначениями вентилей.
На фиг. 9б, 9в представлены соответственно диаграммы изменений тока iA в проводе A и сквозного тока iDD.
Например, вентиль V1 включается в следующих условиях:
- когда сигнал WA является наибольшим и, кроме того,
WA > Wmod;
- когда сигнал WA является промежуточным и, кроме того, выполняются условия:
WB < Wmod и WC < Wmod
Чем меньше амплитуда сигналов WA, WB, WC, тем продолжительнее интервалы времени, в которые включена только одна из пар вентилей V1, V4 или V3, V6 или V5, V2. При этом выпрямленный ток замыкается через такую пару вентилей и не попадает в провода переменного тока данного ВИ. В результате при уменьшении амплитуды указанных сигналов уменьшается отношение амплитуды гладких составляющих токов в проводах переменного тока к выпрямленному току.
Основной регулятор 13 формирует задания составляющих тока в проводах переменного тока ВИ3 iMgx, iMgy в системе вращающихся координат x, y.
В частном случае асинхронного электропривода это может быть система координат 1, 2, связанная с изображающим вектором потока ротора ψr. Задания формируются таким образом, чтобы обеспечивались необходимые токи конденсаторов на выходе ВИ3 и токи статора двигателя, причем токи статора должны в каждый момент времени обеспечивать необходимый момент двигателя и его необходимое электромагнитное состояние. В случае асинхронного электропривода, например, может обеспечиваться необходимое значение магнитного потока ротора ψr . Задания токов формируются основным регулятором в зависимости от поступающих на его входы комнатных сигналов и сигналов обратной связи. Последние формируются формирователем сигналов обратной связи 14. На вход указанного формирователя поступают сигналы от датчиков тока 6, 7 и напряжения 8, 9 в главных цепях электропривода. При наличии в электроприводе соответствующих дополнительных датчиков на входы формирователя могут поступать сигналы скорости и положения.
Сигналы заданий токов iMgx, iMgy поступают на вход элемента 15, который формирует сигнал модуля изображающего вектора заданного тока iMg. Кроме того, сигналы заданий токов в координатах x, y проходят через блок 16 делительных элементов, выходные сигналы которых WMx, WMy поступают на вход преобразователя 17 поворота.
На входы угла этого преобразователя поступают от формирователя 14 сигналы cosγM,sinγM , где γM - угол поворота оси α относительно оси статора. Преобразователь поворота преобразует сигналы заданий WMx, WMy в систему координат α,β статора, результатом преобразования оказываются сигналы wMα,wMβ .
Далее эти сигналы проходят через преобразователь 18 числа фаз, выходные сигналы которого WMA, WMB, WMC вводятся в качестве сигналов заданных отношений токов в широтно-импульсный модулятор 20.
На входы делителя блока 16 поступает сигнал с выхода элемента 28 выделения максимального сигнала.
На один из входов этого элемента поступает модуль вектора заданных токов iMg с выхода элемента 15. Если бы отсутствовал сигнал на втором входе элемента 28, его выходные сигналы имели бы единичную амплитуду и электропривод управлялся бы как в прототипе, т.е. вектор токов в проводах переменного тока ВИ3 управлялся бы только по направлению.
В данном электроприводе на второй вход элемента 28 поступает сигнал iD измеренного значения выпрямленного тока. Если измеренное значение выпрямленного тока iD, превышает модуль вектора заданных токов iMg, то уменьшается амплитуда сигналов WMx, WMy, следовательно, также амплитуда сигналов WMA, WMB, WMC. При этом уменьшается отношение амплитуды гладких составляющих токов в проводах переменного тока ВИ3 к выпрямленному току, в чем и проявляется отличие от известного способа.
При этом используется элемент 27 выделения максимального сигнала в цепи задания выпрямленного тока. Сигнал на первом входе этого элемента - модуль вектора заданных токов iMg. Когда сигнал на втором входе этого элемента iEg превышает значение сигнала на первом входе, задание выпрямленного тока и измеренный выпрямленный ток оказываются увеличенными по сравнению со значением iMg. В результате выпрямленный ток задается сигналом iEg, а амплитуда гладких составляющих токов в проводах переменного тока ВИ3 - по-прежнему сигналом iMg.
Формирование сигнала iEg для случая, когда ВИ2 выполнен на основе обычных, полууправляемых тиристоров, представлено на фиг. 6.
Как следует из схемы, указанный сигнал формируется в зависимости от модуля вектора заданных токов iMg, а также измеренных значений: выходного активного напряжения второго ВИ UMa и модуля напряжения источника (сети) UL, при этом реализуется соотношение
iEg = KEg (UMa/UL) • iMg.
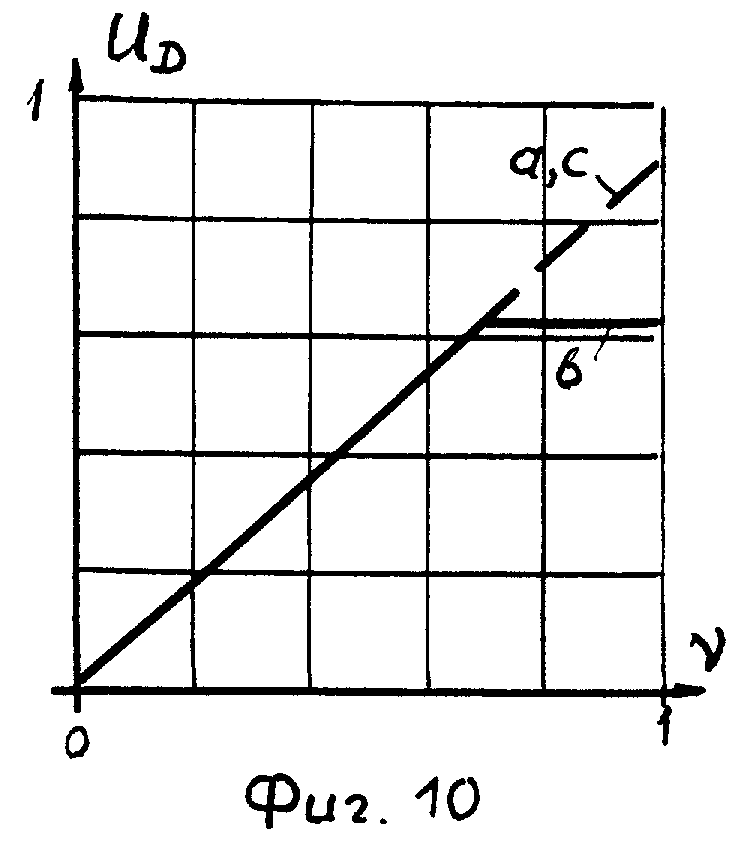
По мере роста скорости электропривода увеличивается выходное активное напряжение. При превышении определенного уровня скорости в зависимости от задаваемого программно значения коэффициента KEg (передаточный коэффициент элемента 64) значение iEg начинает увеличиваться по сравнению со значением iMg, выпрямленный ток iD начинает расти по сравнению с амплитудой гладких составляющих токов в проводах переменного тока ВИ3 и прекращается рост необходимого выпрямленного напряжения UD.
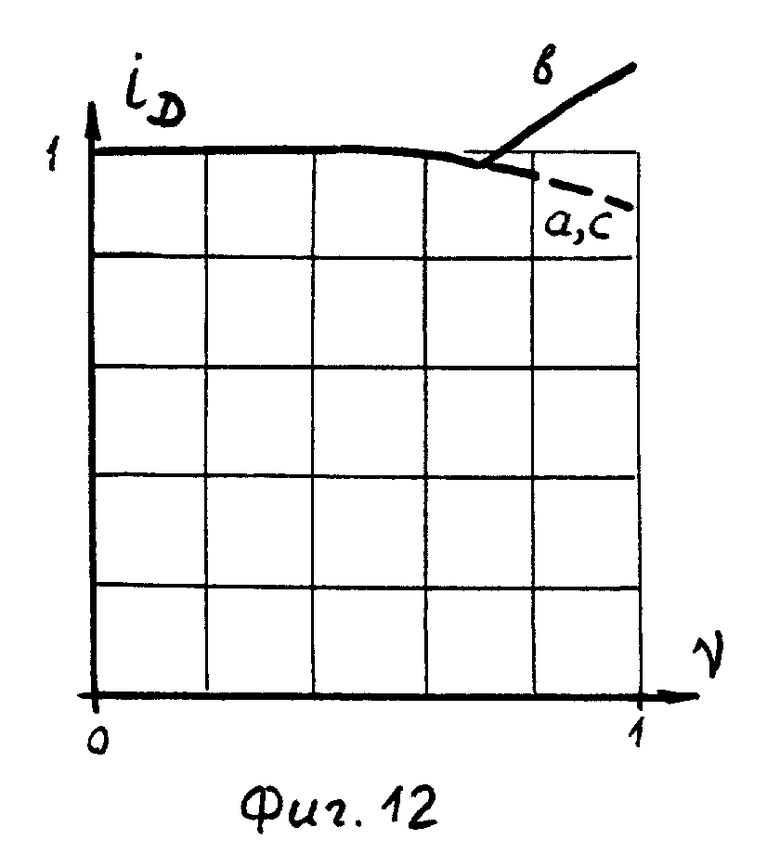
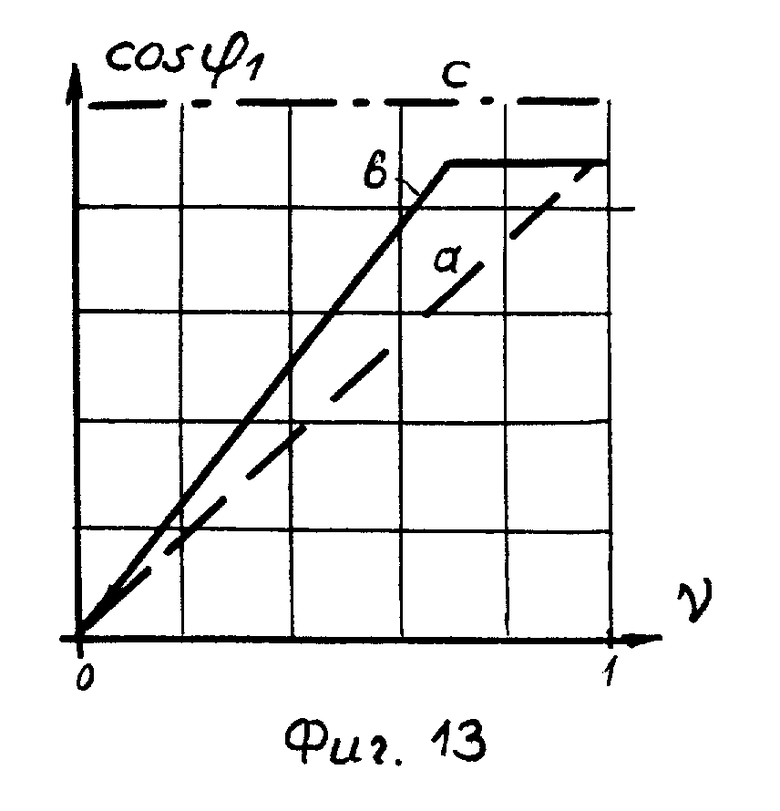
Представленные на фиг. 10 характеристики соответствуют: а) прототипу, б) предложенному электроприводу по фиг. 1.
Здесь обозначено: ν относительная скорость; UD - выпрямленное напряжение; iD - выпрямленный ток; i1 - ток, потребляемый из сети; cosϕ1 - коэффициент мощности по основной гармонике тока, потребляемой из сети.
Характеристики соответствуют некоторому неизменному моменту электропривода. Максимальное выпрямленное напряжение установившихся режимов UDxmax для предлагаемого способа оказывается ниже, чем для известного. Вторичное напряжение изолирующего трансформатора, через который электропривод подключается к сети, выбирается пропорциональным значению UDsmax, поэтому для предлагаемого способа выбирается уменьшенное вторичное напряжение. Первичный ток изолирующего трансформатора i1 при прочих равных условиях имеет совпадающие значения для известного и для предлагаемого способов при максимальной скорости электропривода. В этом режиме совпадают также значения угла управления α ВИ2 и, как следствие, коэффициента мощности по основной гармонике на стороне питающей сети cosϕ1, а также гармонический состав токов, потребляемых от сети.
Однако по мере снижения скорости вплоть до граничного значения ν1 при управлении по предлагаемому способу ток i1 уменьшается, угол управления ВИ2 остается сравнительно небольшим, коэффициент мощности удерживается на высоком уровне, удерживается сравнительно благоприятный гармонический состав токов, потребляемых от сети. В то же время при управлении по известному способу по мере снижения скорости падает коэффициент мощности и ухудшается гармонический состав токов, потребляемых от сети.
Для электроприводов с высокими требованиями к качеству регулирования выходными сигналами основного регулятора 13 являются задания составляющих напряжения статора Usgx, Usgy во вращающейся системе координат x, y. Эти сигналы поступают в качестве заданий на блок 66 (фиг. 7) регуляторов. На входы обратной связи этих регуляторов поступают измеренные значения составляющих напряжения статора Usx, Usy от формирователя 14 сигналов обратной связи. В зависимости от разности заданных и измеренных значений формируются выходные сигналы регуляторов URUx, URUy.
Возможно использование пропорциональных регуляторов, реализующих векторное соотношение
где Ωu - полоса пропускания контура регулирования напряжения.
Сигналы заданий токов в проводах переменного тока ВИ3 формируются, как следует из фиг. 7, по векторному соотношению
где J - оператор поворота вектора на 90o,
C - относительная емкость конденсаторной батареи,
ωb - базовая угловая частота,
νm - относительная скорость системы координат.
Как следует из фиг. 7 и формулы (3), в задания токов ВИ3 входят:  - измеренные токи статора,
- измеренные токи статора,  - измеренные напряжения статора, uRu= (uRux,uRuy) - выходные сигналы регуляторов напряжения 66.
- измеренные напряжения статора, uRu= (uRux,uRuy) - выходные сигналы регуляторов напряжения 66.
Первое слагаемое в соотношении для заданных токов - компенсирующая связь по токам статора, второе слагаемое обеспечивает необходимые установившиеся токи конденсаторной батареи. Как указано, дополнительные регуляторы напряжения предназначены для электроприводов с повышенными требованиями к качеству регулирования, следовательно, с требованиями высокого быстродействия контуров регулирования магнитного потока и момента. Достижению этой цели способствует независимое регулирование амплитуды выходных токов ВИ3 само по себе. При наличии регуляторов напряжения становится возможным установить в контурах регулирование магнитного потока и момента быстродействие, которое ограничивается только дискретностью управления ВИ (частотой ШИМ).
В электроприводе по фиг. 2, т.е. с выполнением обоих ВИ на полностью управляемых вентилях, блок 10 содержит дополнительный узел по фиг. 8.
Управление вентилями ВИ 11 осуществляет широтно-импульсный модулятор 73, входные сигналы на который поступают через преобразователь числа фаз 74, а на последний - через преобразователь 75 поворота вектора. На опорные входы преобразователя 75 поступают сигналы cosγL,sinγL , где γL - угол поворота изображающего вектора напряжений источника переменного напряжения (сети) UL относительно оси фазы A.
Входные сигналы поступают на преобразователь 75 поворота от блока 76 делительных элементов. На входы делимого этих элементов поступают задания токов в проводах переменного тока ВИ11 iLUg, iLVg в координатах U, V. Здесь ось U направлена по вектору UL, ось V - ортогональная опережающая. На вход делителя делительных элементов 76 поступает сигнал с выхода элемента выделения максимального сигнала 77. На входы этого элемента поступают сигнал iD измеренного выпрямленного тока и сигнал iLg задания модуля изображающего вектора токов в проводах переменного тока ВМ11. В большинстве режимов электропривода выпрямленный ток превышает задание ILg, и для ВИ11 реализуется независимое управление амплитудой токов в проводах переменного тока. Задание активного тока формируется элементами 79, 81 по соотношению
iLUg = (UDg/UL) • iD
в функции от заданного выпрямленного напряжения UDg. Этот сигнал поступает с выхода элемента 29 (фиг. 4). Таким путем обеспечивается необходимая мощность, подаваемая в цепь выпрямленного тока. Задание опережающего тока формируется элементами 82, 80 по соотношению
iLvg= bCL•νL•uL, (5)
где
BCL - относительная проводимость конденсаторной батареи 12 на входе ВИ 11.
Характеристики электропривода по фиг. 2 представлены на фиг. 10-13 кривыми в). Все характеристики соответствуют установившимся режимам электропривода с неизменным моментом нагрузки. Здесь выпрямленное напряжение и ток, потребляемый от сети, примерно пропорциональны скорости электропривода, выпрямленный ток определяется необходимым током статора и током конденсаторной батареи на выходе ВИ3, на стороне питания электропривода от источника (сети) поддерживается коэффициент мощности по основным гармоникам токов cosϕ1 = 1. .
Электропривод по фиг. 2 обеспечивает высокие динамические и энергетические показатели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2362264C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2456742C1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
| Способ регулирования скорости вращения автоматизированного частотно-управляемого электропривода и устройство для его осуществления | 1979 |
|
SU1043805A1 |
| Вентильный электропривод | 1983 |
|
SU1234940A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Электропривод | 1987 |
|
SU1515324A1 |
Изобретение относится к управляемым электроприводам переменного тока с преобразователями частоты. Сущность предложенного способа заключается в том, что при формировании токов на выходах преобразователя частоты, питающего электродвигатель и выполненного с двумя выпрямителями-инверторами, один из которых на полностью управляемых вентилях, соединенными между собой через сглаживающий реактор, при котором регулируют выпрямленный ток в зависимости от требуемой амплитуды гладких составляющих токов на выходе преобразователя частоты, переключают вентили каждого из выпрямителей-инверторов в зависимости от заданного для него распределения токов в проводах переменного тока и фильтруют высокочастотные составляющие токов на выходе преобразователя частоты, переключение вентилей выпрямителя-инвертора на полностью управляемых вентилях производят также в зависимости от заданной амплитуды гладких составляющих токов в его проводах переменного тока и раздельно от выпрямленного тока. Это обеспечивает повышение коэффициента мощности электропривода и улучшение гармонического состава токов при пониженных скоростях. 6 з.п.ф-лы, 13 ил.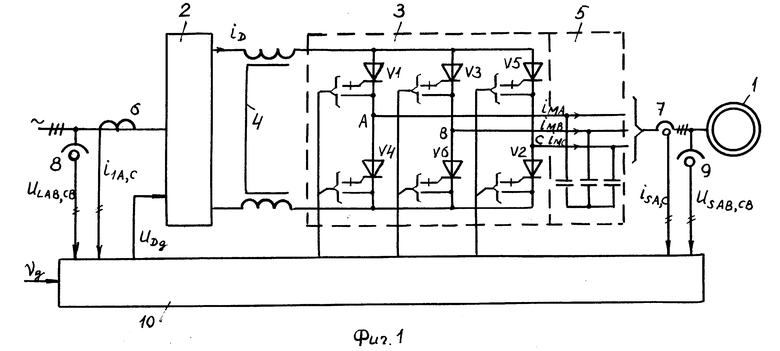
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вейнгер А.М | |||
| Регулирующий синхронный электропривод | |||
| - М.: Энергоатомиз дат, 1983, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Wu B., Devan Sh | |||
| B., Sleton G.R | |||
| PWM-CSI Inverter for Induction Motor Driver, IEEE Industry Application Society, Confer ence Reco rd, 1989, p | |||
| Способ выделения сульфокислот из нефтяных масел | 1913 |
|
SU508A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| RU, патент, 2074394, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
