Изобретение относится к групповым дистанционно управляемым робототехническим комплексам, предназначенным для огневой поддержки на поле боя общевойсковых подразделений Вооруженных сил и аналогичных подразделений других силовых структур.
Известен наземный робототехнический комплекс [1], предназначенный для материально-технического обеспечения подразделений первого эшелона сухопутных войск при ведении боевых действий. Комплекс содержит по меньшей мере один мобильный робот, средства его парковки и пост дистанционного управления движением и функционированием робота. Робот содержит самоходную транспортную платформу с электроприводом, контроллер и систему проводного и/или беспроводного обмена информацией с постом дистанционного управления. Главным недостатком комплекса является отсутствие в его составе средств огневого поражения целей, что исключает возможность огневой поддержки подразделений.
Известен робототехнический комплекс для ведения разведки и огневой поддержки [2]. Комплекс содержит роботизированную платформу на базе гусеничного шасси с электроприводом, бортовую систему управления с навигационной и приемо-передающей аппаратурой, радиоканал управления, систему технического зрения, пульт дистанционного управления, модуль стрелково-гранатометного вооружения с средствами разведки, а также дополнительное оборудование в составе маскировочных средств, технологического пульта управления и зарядного устройства. Задачи по назначению комплекса выполняет расчет в составе двух военнослужащих. Недостатками комплекса являются низкая помехозащищенность используемого радиоканала управления (подвержен радиоподавлению противником на поле боя), отсутствие у военнослужащих индивидуальных средств управления и связи между собой и с управляемой платформой. Главный недостаток комплекса состоит в том, что он предназначен для одиночного применения и не пригоден для согласованных действий в составе единой группы роботизированных платформ.
Наиболее близким к заявляемому изобретению является многофункциональный робототехнический комплекс обеспечения боевых действий [3], содержащий группу дистанционно управляемых самодвижущихся роботизированных платформ, каждая из которых оснащена бортовыми системами технического зрения, приема/передачи информации и навигации, пультом дистанционного управления, боевым модулем со средством огневого поражения цели. Помимо боевого модуля платформы комплектуются модулем разведки или транспортным модулем. Система навигации платформы обеспечивает ее перемещение в дистанционном ручном, полуавтоматическом и автоматическом режимах. В состав комплекса также входит пункт дистанционного управления, обеспечивающий одновременное или последовательное управление группой платформ. Дополнительное оборудование комплекса в виде автомобиля с кузовом-фургоном используется для доставки укомплектованных платформ и аппаратуры пункта дистанционного управления к месту применения.
Недостатками робототехнического комплекса-прототипа [3] являются:
1. Избыточный состав средств (модули разведки и транспортный, автомобиль с кузовом-фургоном) затрудняет эффективное и гибкое применение комплекса по его прямому назначению на поле боя - непосредственной огневой поддержке подразделений.
2. Использование в качестве средства приема/передачи управляющих сигналов и данных только радиоканала не обеспечивает требуемые высокие помехозащищенность и устойчивость управления комплексом.
3. Управление платформами непосредственно с пункта дистанционного управления без промежуточных (буферных) средств радиоретрансляции требует размещения пункта вблизи огневых позиций платформ, что приводит к его низкой живучести и, как следствие, снижению надежности комплекса в целом.
4. Возможность полуавтоматического и автоматического управления платформами не подкреплена конкретными аппаратно-программными решениями, необходимыми для реализации указанных функций.
Перечисленные недостатки составляют общий недостаток робототехнического комплекса-прототипа, заключающийся в его невысокой боевой эффективности.
Цель заявляемого изобретения состоит в создании надежного, устойчивого в управлении, рационального по составу и выполняемым функциям робототехнического комплекса, способного в различных условиях обстановки с высокой боевой эффективностью решать задачу огневой поддержки общевойсковых подразделений Вооруженных сил и аналогичных подразделений других силовых структур.
Для достижения указанной цели робототехнический комплекс огневой поддержки, содержащий группу дистанционно управляемых самодвижущихся роботизированных платформ и подвижный пункт дистанционного управления группой роботизированных платформ, при этом каждая из упомянутых платформ оснащена боевым модулем с средством огневого поражения цели и бортовыми системами технического зрения, приема/передачи информации и навигации, снабжен дистанционно управляемой самодвижущейся роботизированной базовой станцией с многоканальным ретранслятором, индивидуальными модулями радиосвязи и индивидуальными навигационными модулями для каждого члена расчета военнослужащих, прибором разведки и персональным компьютером для командира каждого расчета военнослужащих, пультом дистанционного управления для оператора платформы и пультом дистанционного управления для оператора боевого модуля каждого расчета военнослужащих, а упомянутый подвижный пункт дистанционного управления снабжен персональным компьютером для командира-оператора подвижного пункта и системой радиообмена речевыми сообщениями и информацией с командирами расчетов военнослужащих по радиоканалу связи через упомянутый многоканальный ретранслятор, который выполнен с возможностью обеспечения приема/передачи информации по радио- и волоконно-оптическому каналам связи с бортовыми системами приема/передачи информации упомянутых платформ, при этом упомянутые индивидуальные модули радиосвязи выполнены с возможностью обеспечения радиообмена речевыми сообщениями и данными между военнослужащими расчета и приема/передачи информации по радиоканалу связи через многоканальный ретранслятор, персональный компьютер для командира - оператора подвижного пункта выполнен с возможностью обеспечения выведения базовой станции на дежурную позицию и ее возвращения на исходную позицию, координации действий и управления расчетами военнослужащих, а персональный компьютер для командира расчета военнослужащих выполнен с возможностью обеспечения выбора цели и огневой позиции упомянутой платформы, определения координат цели и маршрута выдвижения и возвращения платформы на исходную позицию, расчета целеуказания и контроля результатов поражения цели, причем упомянутые пульты дистанционного управления оператора платформы и оператора боевого модуля выполнены с возможностью обеспечения выведения платформы на огневую позицию и ее возвращения, ориентирования на цель и прицельного применения средства огневого поражения путем наведения на цель, производства выстрела, восстановления наводки и ориентации платформы после выстрела.
Существенными отличительными признаками заявляемого изобретения по сравнению с прототипом являются:
1. Включение в состав робототехнического комплекса самодвижущейся базовой станции с многоканальным ретранслятором, выполненным с возможностью обеспечения приема/передачи информации по радио- и волоконно-оптическому (с практически абсолютной помехозащищенностью) каналам связи с бортовыми системами приема/передачи информации платформ, повышает надежность и устойчивость управления комплексом без необходимости размещения военнослужащих вблизи огневых позиций платформ. Последнее обстоятельство способствует сохранению жизней военнослужащих и повышению живучести комплекса в боевых условиях.
В прототипе радиоретранслятор на выдвигаемой на передовые позиции базовой станции и волоконно-оптический канал связи не предусмотрены, что приводит к снижению надежности, управляемости и живучести робототехнического комплекса.
2. Комплекс снабжен индивидуальными модулями радиосвязи и индивидуальными навигационными модулями для каждого члена расчета военнослужащих. При этом индивидуальные модули радиосвязи выполнены с возможностью обеспечения радиообмена речевыми сообщениями и данными между военнослужащими расчета и приема/передачи информации по радиоканалу связи через многоканальный ретранслятор. Тем самым обеспечивается взаимозаменяемость и согласованное взаимодействие военнослужащих при управлении платформами на этапах подготовки и боевого применения комплекса.
В прототипе оснащение комплекса индивидуальными модулями не предусматривается.
3. Комплекс также снабжен прибором разведки и персональным компьютером для командира каждого расчета военнослужащих. При этом персональный компьютер выполнен с возможностью обеспечения выбора цели и огневой позиции платформы, определения координат цели и маршрута выдвижения и возвращения платформы на исходную позицию, расчета целеуказания и контроля поражения цели. Оснащение командира расчета прибором разведки (наиболее предпочтителен дальномерно-угломерный прибор) позволяет оперативно без промежуточных звеньев приема/передачи доводить достоверные разведданные о цели непосредственно до лица, принимающего решения, т.е. до самого командира. Этим достигается высокая живучесть разведсредства, поскольку на поле боя командир действует скрытно с защищенной позиции. Кроме того, наличие персонального компьютера командира расчета позволяет оперативно и эффективно решать перечень тактических задач, стоящих перед конкретным расчетом.
В прототипе модулем разведки комплектуется часть платформ, позиции которых могут соприкасаться с позициями средств поражения противника. В результате снижается живучесть разведсредств, а также оперативность и достоверность разведданных.
4. Комплекс также снабжен пультом дистанционного управления для оператора платформы и пультом дистанционного управления для оператора боевого модуля каждого расчета военнослужащих. При этом пульты выполнены с возможностью обеспечения выведения платформы на огневую позицию и ее возвращения, ориентирования на цель и прицельного применения средства огневого поражения путем наведения на цель, производства выстрела, восстановления наводки и ориентации платформы после выстрела. Согласованная работа пультов дистанционного управления позволяет операторам расчета слаженно выполнять совместные действия по управлению движением, ориентированию платформы и прицельному применению средства огневого поражения.
В прототипе предусмотрен один пульт дистанционного управления, позволяющий решать несколько частных задач.
5. Подвижный пункт дистанционного управления снабжен персональным компьютером для командира-оператора подвижного пункта и системой радиообмена речевыми сообщениями и информацией с командирами расчетов военнослужащих по радиоканалу связи через многоканальный ретранслятор. При этом персональный компьютер командира-оператора выполнен с возможностью обеспечения выведения базовой станции на дежурную позицию и ее возвращения на исходную позицию, координации действий и управления расчетами военнослужащих. Эти меры позволяют, во-первых, организовать устойчивую трехуровневую централизованную (центр-командир-оператор) высокоскоростную динамическую сеть, узлами которой являются командиры расчетов (через них - операторы платформ и боевых модулей), ретранслятор и, через ретранслятор, роботизированные платформы, и, во-вторых, обеспечить оперативность передислокации базовой станции в требуемый район поля боя и ее сохранность по окончании боевого применения. В прототипе такие меры отсутствуют.
Приведенные отличительные признаки обеспечивают получение технического результата, заключающегося в повышении боевой эффективности робототехнического комплекса огневой поддержки.
Заявляемый робототехнический комплекс иллюстрируют следующие графические материалы:
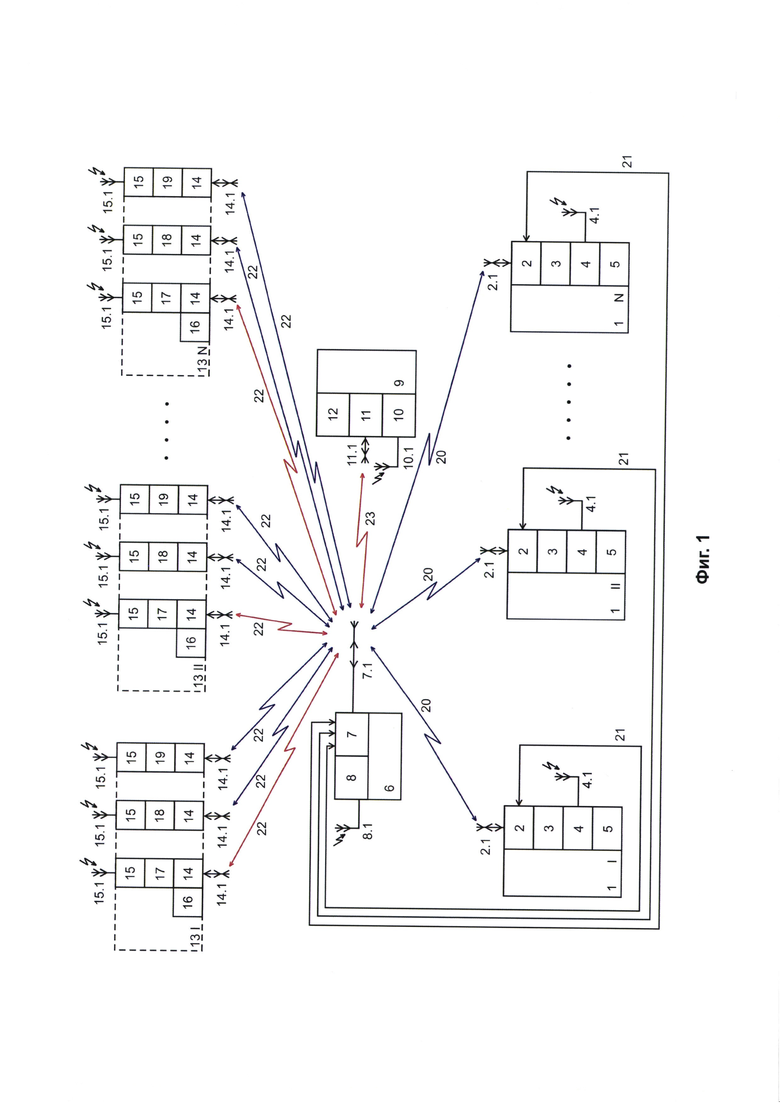
Фиг. 1. Структурная схема робототехнического комплекса, где:
1. Роботизированная платформа.
2. Бортовая система приема/передачи информации.
2.1. Приемо-передающая антенна.
3. Бортовая система технического зрения.
4. Бортовая система навигации.
4.1. Приемная антенна сигналов спутниковых навигационных систем (СНС).
5. Боевой модуль.
6. Базовая станция.
7. Многоканальный ретранслятор.
7.1. Приемо-передающая антенна.
8. Система навигации базовой станции.
8.1 Приемная антенна сигналов СНС.
9. Подвижный пункт дистанционного управления.
10. Система навигации подвижного пункта.
10.1. Приемная антенна сигналов СНС.
11. Система радиообмена с командирами расчетов.
11.1. Приемо-передающая антенна.
12. Персональный компьютер командира-оператора.
13. Расчет военнослужащих.
14. Индивидуальный модуль радиосвязи.
14.1. Приемо-передающая антенна.
15. Индивидуальный навигационный модуль.
15.1. Приемная антенна сигналов СНС.
16. Прибор разведки.
17. Персональный компьютер командира расчета.
18. Пульт дистанционного управления оператора платформы.
19. Пульт дистанционного управления оператора боевого модуля.
20. Линия радиоканала связи ретранслятора с бортовыми системами приема/передачи информации.
21. Линия волоконно-оптического канала связи ретранслятора с бортовыми системами приема/передачи информации.
22. Линия радиоканала связи индивидуальных модулей радиосвязи с ретранслятором.
23. Линия радиоканала связи системы радиообмена подвижного пункта с ретранслятором.
Символами I, II, …, N обозначены условные номера роботизированных платформ и соответствующих расчетов военнослужащих.
Примечание - На схеме не показана линия радиообмена речевыми сообщениями и данными между индивидуальными модулями радиосвязи военнослужащих в расчетах. Персональный компьютер командира-оператора 12 условно включен в состав подвижного пункта 9. Красным цветом обозначены линии радиообмена через ретранслятор командиров расчетов с подвижным пунктом, синим цветом - операторов с платформами.
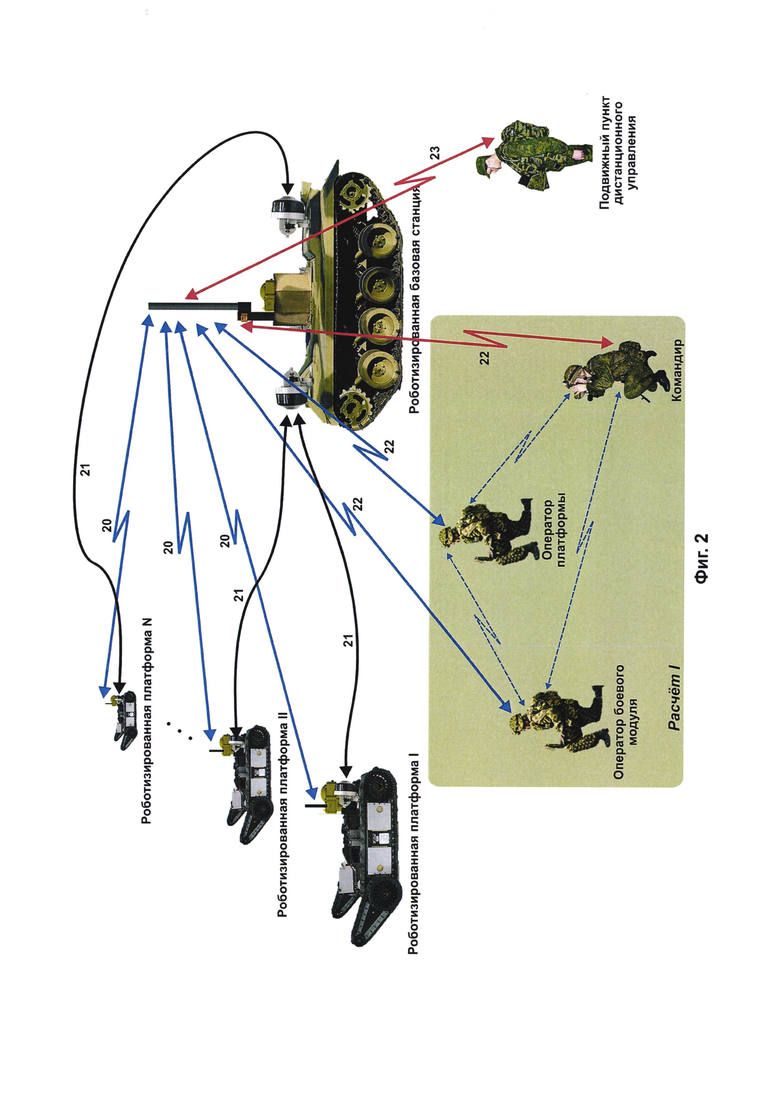
Фиг. 2. Схема применения робототехнического комплекса.
Примечание - Схема соответствует переносному варианту исполнения подвижного пункта дистанционного управления. Синим пунктиром обозначена линия радиообмена речевыми сообщениями и данными между индивидуальными модулями радиосвязи военнослужащих в расчете, не показанная на Фиг. 1.
Рассмотрим функции и возможность реализации компонентов заявляемого робототехнического комплекса.
Функцией дистанционно управляемых платформ 1, Фиг. 1, является доставка на огневые позиции боевых модулей 5 и применение входящих в их состав средств огневого поражения. Групповой принцип доставки, развертывания и применения платформ на поле боя требует их исполнения с малыми массогабаритными параметрами. Такими параметрами обладает отечественная универсальная платформа малогабаритного робототехнического комплекса «Капитан» разработки ЦНИИ РТК. Другим примером реализации является платформа, разработанная компанией iRobot Corporation [4] (представлена на Фиг. 2).
Боевой модуль 5 комплектуется универсальным устройством установки и крепления средства поражения, дистанционно управляемым прицельно-спусковым механизмом и съемным средством огневого поражения цели. Сменный состав средств включает различные образцы стрелкового оружия и средств ближнего боя: реактивные гранатометы и огнеметы, переносные ПТРК, самозарядные снайперские винтовки, инженерные боеприпасы с дистанционным подрывом и др. Конкретный тип устанавливаемого образца определяется решаемой боевой задачей.
Самодвижущаяся дистанционно управляемая базовая станция 6 предназначена для транспортирования ретранслятора 7 на дежурную позицию и его возвращения на исходную позицию. В качестве базовой станции может использоваться транспортный вариант робототехнического комплекса «Нерехта» с грузовой платформой, разработанного ОАО «Завод им. В.А. Дегтярева» (представлен на Фиг. 2).
Индивидуальные модули радиосвязи 14, бортовые системы приема/передачи информации 2, многоканальный ретранслятор 7 и система радиообмена с командирами расчетов 11 составляют единую постоянно действующую высокоскоростную MANET-сеть, построенную, как отмечено выше, по трехуровневой централизованной схеме.
Главной функцией сети является обеспечение обмена через ретранслятор 7 управляющей и телеметрической информацией между пультами дистанционного управления 18, 19 операторов и системами приема/передачи информации 2 платформ (линии радиоканалов связи 20, 22). Управляющая информация, предаваемая по прямому каналу «пульт управления-платформа», содержит команды управления движением и ориентацией платформ, прицельным применением средств огневого поражения и др., телеметрическая информация (обратный канал «платформа-пульт управления») - квитанции о выполнении команд, параметры местоположения и состояния бортовых систем платформ, видеоданные от систем технического зрения.
Обеспечивающими функциями MANET-сети являются доведение от командира-оператора подвижного пункта 9 с помощью системы радиообмена 11 координирующей и управляющей информации до модулей радиосвязи 14 командиров расчетов (линии радиоканалов связи 22, 23) и радиообмен речевыми сообщениями и данными между командирами и операторами в расчетах. Последний необходим для обеспечения согласованности действий и взаимозаменяемости военнослужащих внутри расчетов.
В целях унификации компоненты MANET-сети реализуются на основе комплектующих единого стандарта 802.11/b/g/n, широко используемого при построении динамических сетей связи различного назначения. Отличие между компонентами заключается в комплектации бортовых систем 2 и ретранслятора 7 дополнительными усилителями в приемопередающих трактах и штыревыми антеннами 2.1, 7.1, обладающими большим коэффициентом усиления в горизонтальной плоскости (плоскости поля боя) по сравнению с всенаправленными плоскими антеннами 11.1, 14.1, используемыми в системе радиообмена 11 и индивидуальных модулях 14. Эти меры необходимы для обеспечения большей дальности действия линий радиоканалов связи робототехнического комплекса.
Индивидуальные навигационные модули 15 предназначены для определения координат военнослужащих расчетов на поле боя в системе координат ПЗ-90.11, принятой в РФ для топографических, геодезических и навигационных определений. Определяемые параметры местоположения по MANET-сети доставляются соответствующим командирам (командирам расчетов, командиру-оператору подвижного пункта), чем обеспечивается возможность управления действиями военнослужащих внутри расчетов и координация и управление расчетами в группе. Для реализации указанной функции, требующей местоопределения центра масс объекта (военнослужащего), достаточно использовать один из существующих образцов модулей СНС среднего класса точности без привлечения средств инерциальной навигации.
Аналогичное предназначение и исполнение имеют системы навигации 8 базовой станции и 10 подвижного пункта дистанционного управления. Однако их наличие не является обязательным. Так, при действиях в условиях прямой видимости подвижным пунктом (командиром-оператором) базовой станции управление ее движением и функционированием не требует обязательного привлечения данных об их местоположении. При значительных удалениях эти данные необходимы. Также они требуются при реализации в робототехническом комплексе метода относительной навигации, когда управление его компонентами выполняется с использованием разностных (относительно координат подвижного пункта и/или базовой станции) координат.
Более сложной по составу определяемых параметров является задача, решаемая бортовыми системами навигации 4. Для управления движением платформы (особенно на пересеченной местности) и прицельного применения средства огневого поражения, помимо координат центра масс, требуется определение параметров пространственной ориентации, т.е. текущих углов курса, тангажа и крена. Для этого бортовая система навигации 4 платформы строится по схеме комплексирования модуля СНС и инерциального модуля, представляющего собой бесплатформенную инерциальную навигационную систему (БИНС) в составе выполненных по МЭМС-технологии трехосевых датчика угловой скорости и акселерометра. БИНС реализуется в виде типового инерциального измерительного устройства (Inertial measurement unit, IMU), например, такого как комбинированный датчик MPU 9255 компании InvenSens.
Функция и характеристики бортовой системы технического зрения 3 определяются тактикой применения платформ 1 (см. Фиг. 2). На поле боя платформа выполняет движение «вперед-назад» без интенсивного маневрирования по курсу в узком диапазоне углов тангажа и крена. Поэтому необходимый объем видеоданных, передаваемых в составе телеметрической информации, ограничивается стабилизированным видеоизображением объектов, находящихся впереди платформы. Этого достаточно для преодоления несложных подъемов и спусков, объезда опасных препятствий. В результате система 3 может быть выполнена в виде оптико-электронной системы переднего обзора. Примером реализации является доработанный для установки на механическую платформу комплект панорамной видеокамеры ZENMUSE Х3 с электронным стабилизатором Osmo компании DJI.
Важной составляющей робототехнического комплекса является обладающая практически абсолютной помехозащищенностью линия волоконно-оптического канала связи 21. Линия включает оптический кабель для двухсторонней связи ретранслятора 7 с бортовыми системами приема/передачи данных 2, стандартные оптические кроссы для подключения кабеля к входным цепям оптических приемо-передающих трактов ретранслятора 7 и систем 2, мультиплексоры и демультиплексоры, регенераторы на приемных концах линии, передающие лазеры и фотоприемники, модуляторы и усилители. Особенность состоит в использовании на обеих сторонах линии катушек с фрикционным тормозом, требующихся для стравливания оптического волокна при движении платформ.
Прибор разведки 16 предназначен для измерения дальности, дирекционного угла и угла места цели, необходимых для определения ее прямоугольных или географических координат. Координаты необходимы для прицельного применения средств боевых модулей и других средств огневого поражения, взаимодействующих с робототехническим комплексом. В качестве прибора 16 может использоваться угломерный блок комплекта носимой аппаратуры топогеодезической привязки и формирования целеуказаний [5], дополненный лазерным дальномером IWT LRF 905/1550. Другим вариантом исполнения является прибор разведки ПДУ-4 производства АО «ЦНИИТОЧМАШ».
Необходимость взаимозаменяемости персонального компьютера 17 и пультов дистанционного управления 18, 19 требует идентичности их аппаратно-программного исполнения. Аппаратная составляющая компьютера и пультов может быть реализована на основе системы-на-кристалле (СнК) SmartFusion2, включающей выполненную по Flash-технологии энергонезависимую матрицу ПЛИС и полноценную процессорную подсистему на базе процессора ARM Cortex М3. Вычислительные возможности и массогабаритные характеристики кристалла полностью соответствуют задачам, решаемым персональным компьютером и пультами.
Программная составляющая может строиться на основе операционной системы Linux 5.x и включает программные модули, обеспечивающие определение координат цели и маршрута выдвижения платформы, ее ориентирование на цель, прицельное применение средства огневого поражения, а также выполнение ряда других функций, рассмотренных выше.
Персональный компьютер командира-оператора 12 имеет исполнение, аналогичное аппаратно-программному исполнению персонального компьютера командира расчета 17. Отличие состоит в дополнительном оснащении программной составляющей программными модулями по предназначению командира-оператора подвижного пункта дистанционного управления.
В заключение отметим, что подвижный пункт дистанционного управления может иметь переносное и возимое исполнение. В первом случае транспортирование аппаратуры пункта выполняется в пеших боевых порядках аналогично индивидуальному приборному оснащению военнослужащих расчетов. Во втором - с использованием тех же транспортных средств, которые задействуются для перевозки оснащенных расчетов военнослужащих и/или роботизированных платформ.
Таким образом, заявляемое изобретение может быть реализовано и позволяет повысить боевую эффективность робототехнического комплекса огневой поддержки.
Источники информации
1. Патент RU 2678553.
2. Патент RU 2686983.
3. Патент RU 2533229.
4. Патент US 7556108 В2.
5. Патент RU 2661676.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕНОСНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ И БОЕВОГО ОБЕСПЕЧЕНИЯ | 2019 |
|
RU2725942C1 |
| КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОГО ПОРАЖЕНИЯ ЦЕЛЕЙ НА ОСНОВЕ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2759534C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| Способ подсвета цели для обеспечения применения боеприпасов с лазерной полуактивной головкой самонаведения | 2021 |
|
RU2755134C1 |
| Способ комплексного применения роботизированных средств огневого поражения и радиоэлектронного подавления системы активной защиты бронетехники | 2020 |
|
RU2746772C1 |
| Робототехнический комплекс для ведения разведки и огневой поддержки | 2017 |
|
RU2686983C2 |
| Общевойсковая нашлемная система отображения информации, управления и целеуказания | 2019 |
|
RU2730727C1 |
| Система управления многофункционального робототехнического комплекса обеспечения боевых действий | 2016 |
|
RU2652329C1 |
| БОРТОВОЙ РЕТРАНСЛЯТОР КОМПЛЕКСА ОБЕСПЕЧЕНИЯ РАДИОСВЯЗИ РАЗВЕДЫВАТЕЛЬНО-УДАРНОЙ СИСТЕМЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2021 |
|
RU2767044C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
Изобретение относится к области дистанционно управляемых робототехнических комплексов, предназначенных для огневой поддержки на поле боя общевойсковых и других аналогичных подразделений силовых структур. Каждая самодвижущаяся роботизированная платформа комплекса оснащена бортовыми системами технического зрения, приема/передачи информации и навигации, боевым модулем с средством огневого поражения. Дополнительно в состав комплекса включены самодвижущаяся базовая станция с многоканальным ретранслятором, обеспечивающим прием и передачу информации по радио- и волоконно-оптическому каналам связи между платформами, подвижный пункт дистанционного управления базовой станцией и расчетами военнослужащих, индивидуальные модули радиосвязи, навигационные модули и аппаратно-программные средства командиров и операторов расчетов, обеспечивающие управление платформами и их боевыми модулями. Использование изобретения позволяет повысить боевую эффективность комплекса и тактическую гибкость его применения в различных условиях боевой обстановки. 2 ил.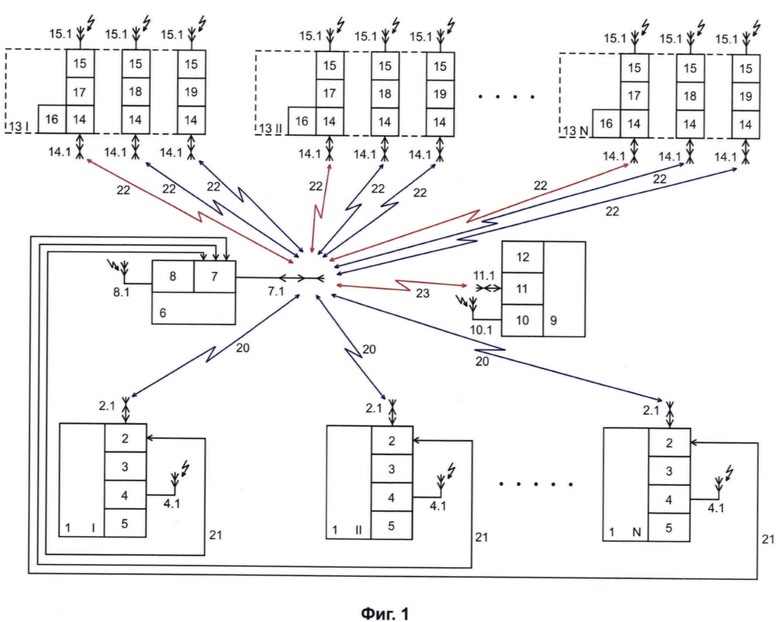
Робототехнический комплекс огневой поддержки, содержащий группу дистанционно управляемых самодвижущихся роботизированных платформ и подвижный пункт дистанционного управления группой роботизированных платформ, при этом каждая из упомянутых платформ оснащена боевым модулем со средством огневого поражения цели и бортовыми системами технического зрения, приема/передачи информации и навигации, отличающийся тем, что он снабжен дистанционно управляемой самодвижущейся роботизированной базовой станцией с многоканальным ретранслятором, индивидуальными модулями радиосвязи и индивидуальными навигационными модулями для каждого члена расчета военнослужащих, прибором разведки и персональным компьютером для командира каждого расчета военнослужащих, пультом дистанционного управления для оператора платформы и пультом дистанционного управления для оператора боевого модуля каждого расчета военнослужащих, а упомянутый подвижный пункт дистанционного управления снабжен персональным компьютером для командира – оператора подвижного пункта и системой радиообмена речевыми сообщениями и информацией с командирами расчетов военнослужащих по радиоканалу связи через упомянутый многоканальный ретранслятор, который выполнен с возможностью обеспечения приема/передачи информации по радио- и волоконно-оптическому каналам связи с бортовыми системами приема/передачи информации упомянутых платформ, при этом упомянутые индивидуальные модули радиосвязи выполнены с возможностью обеспечения радиообмена речевыми сообщениями и данными между военнослужащими расчета и приема/передачи информации по радиоканалу связи через многоканальный ретранслятор, персональный компьютер для командира – оператора подвижного пункта выполнен с возможностью обеспечения выведения базовой станции на дежурную позицию и ее возвращения на исходную позицию, координации действий и управления расчетами военнослужащих, а персональный компьютер для командира расчета военнослужащих выполнен с возможностью обеспечения выбора цели и огневой позиции упомянутой платформы, определения координат цели и маршрута выдвижения и возвращения платформы на исходную позицию, расчета целеуказания и контроля результатов поражения цели, причем упомянутые пульты дистанционного управления оператора платформы и оператора боевого модуля выполнены с возможностью обеспечения выведения платформы на огневую позицию и ее возвращения, ориентирования на цель и прицельного применения средства огневого поражения путем наведения на цель, производства выстрела, восстановления наводки и ориентации платформы после выстрела.
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОЙ ПОДДЕРЖКИ | 2013 |
|
RU2548207C1 |
| АВТОМАТИЗИРОВАННЫЙ ДИСТАНЦИОННО-УПРАВЛЯЕМЫЙ НАБЛЮДАТЕЛЬНО-ОГНЕВОЙ КОМПЛЕКС | 2018 |
|
RU2718622C1 |
| Робототехнический комплекс для ведения разведки и огневой поддержки | 2017 |
|
RU2686983C2 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| WO 2009078940 A1, 25.06.2009 | |||
| US 2008143064 A1, 19.06.2008. | |||

