Изобретение относится к переносным дистанционно управляемым робототехническим комплексам, предназначенным для непосредственной огневой поддержки и боевого обеспечения на поле боя общевойсковых подразделений, включая мотострелковые, десантно-штурмовые и разведывательные, Вооруженных сил, а также аналогичных подразделений других силовых структур.
Известен наземный робототехнический комплекс [1], предназначенный для материально-технического обеспечения подразделений Сухопутных войск в боевых условиях, а именно для подвоза боеприпасов, вооружения, горючего и иных материальных средств. Комплекс содержит мобильный робот (один или несколько), средство транспортировки (парковки) и пост дистанционного управления. Недостатком комплекса является отсутствие функции разведки и поражения целей.
Известен военный робот MAARS (Modular Advanced Armed Robotic System) [2] разработки компании Foster-Miller, имеющий модульную конструкцию, пулемет среднего калибра М240В и усовершенствованную (по сравнению с предшественником-роботом SWORDS) систему управления, обзора и оповещения. Недостатками робота являются ограниченный состав средств поражения (указанный пулемет) и большой вес (до 150 кг).
Известен многофункциональный робототехнический комплекс обеспечения боевых действий [3], состоящий из группы универсальных роботизированных платформ. Платформы комплектуются функциональными модулями: боевым дистанционно управляемым, разведки, транспортным. Система навигации и топопривязки, входящая в состав системы управления платформы, обеспечивает ее перемещение как в дистанционном ручном, так и в полуавтоматическом режиме. Пункт дистанционного управления обеспечивает одновременное и последовательное управление группой платформ. Боевой дистанционно управляемый модуль обеспечивает обнаружение, автоматическое сопровождение и поражение цели. Модуль разведки выполняет обнаружение и распознавание цели с определением ее дальности и координат. Транспортный модуль обеспечивает транспортирование полезной нагрузки и, при необходимости, эвакуацию раненых. Дополнительное оборудование, входящее в состав комплекса, в виде автомобиля с кузовом-фургоном необходимо для доставки укомплектованных платформ и аппаратуры пункта дистанционного управления к месту применения. Недостатком комплекса является избыточный состав средств, затрудняющий его использование малой группой (расчетом) военнослужащих.
Общими недостатками аналогов [1-3] являются:
1. Значительные массогабаритные характеристики комплексов исключают возможность переноски пешими военнослужащими, что снижает живучесть и тактическую гибкость применения в маневренном наступательном бою.
2. Использование в качестве средства передачи управляющих сигналов и приема/передачи данных только радиоканала, подверженного радиоподавлению противником на поле боя, не обеспечивает требуемую высокую помехозащищенность и устойчивость работы систем управления комплексами.
3. Необходимость задействования специальных средств транспортирования (в частности, автомобиля с кузовом-фургоном) снижает оперативность и скрытность доставки и развертывания комплексов в полевых условиях.
Наиболее близким к заявляемому изобретению является робототехнический комплекс для ведения разведки и огневой поддержки [4], содержащий роботизированную подвижную дистанционно управляемую платформу на базе гусеничного шасси с электроприводом, оснащенную бортовой системой управления и передачи информации в составе исполнительных устройств, средств инерциально-спутниковой навигации и ориентации и средств приема/передачи данных, бортовой системой технического зрения, бортовой системой электропитания, а также бортовым модулем полезной нагрузки с средством огневого поражения цели. Задачи по назначению выполняются расчетом в составе двух военнослужащих. Кроме указанных бортовых систем комплекс оснащен бортовым дизель-генератором, бортовым комплексом аудиовидеосредств, а также дополнительным оборудованием в составе комплекта маскировочных средств, технологического пульта управления и зарядного устройства.
Главным недостатком робототехнического комплекса-прототипа [4] являются ограниченные функциональные возможности составных частей и комплекса в целом по выполнению задач по назначению - непосредственной огневой поддержки и боевого обеспечения общевойсковых и других аналогичных подразделений. Это является следствием присущих прототипу общих недостатков аналогов [1-3], сформулированных выше, а также следующих обстоятельств:
1. Предусмотренный прототипом состав расчета (два военнослужащих) без соответствующего приборного оснащения не достаточен для надежного и устойчивого управления комплексом на всех этапах применения в пеших боевых порядках.
2. Отсутствие индивидуальных средств управления и связи военнослужащих между собой и с управляемой роботизированной платформой затрудняет их согласованное взаимодействие на поле боя.
3. Отсутствие распределения функций между военнослужащими расчета и соответствующих индивидуальных аппаратно-программных средств (персональный компьютер, специализированный пульт дистанционного управления) не позволяет оперативно и эффективно решать текущие тактические задачи, такие как выбор и измерение координат цели, выбор огневой позиции и маршрута выдвижения платформы, целеуказание расчету и контроль результатов поражения цели, ориентирование платформы на цель и восстановление ориентации после выстрела и ряд других, необходимые для выполнения комплексом задач по назначению.
Задача, стоящая перед разработчиками заявляемого изобретения, состоит в создании малогабаритного, легкого и удобного в применении расчетами пеших военнослужащих переносного робототехнического комплекса, способного устойчиво и оперативно в различных условиях решать задачу огневой поддержки и боевого обеспечения общевойсковых подразделений Вооруженных сил и аналогичных подразделений других силовых структур.
Для решения этой задачи в переносном робототехническом комплексе огневой поддержки и боевого обеспечения, содержащем роботизированную дистанционно управляемую платформу на базе гусеничного шасси с электроприводом, оснащенную бортовой системой управления и передачи информации в составе исполнительных устройств, средств инерциально-спутниковой навигации и ориентации и средств приема/передачи данных, бортовой системой технического зрения, бортовой системой электропитания, бортовым модулем полезной нагрузки с средством огневого поражения цели, роботизированная платформа с комплектом аккумуляторных батарей бортовой системы электропитания, бортовая система управления и передачи информации, бортовая система технического зрения выполнены с возможностью раздельной переноски двумя военнослужащими и последующей сборки на исходной позиции, робототехнический комплекс содержит переносимый многоканальный ретранслятор, выполненный с возможностью обеспечения приема/передачи управляющей и телеметрической информации по радио- и волоконно-оптическому каналам связи с бортовыми средствами приема/передачи данных, расчет военнослужащих в составе командира, оператора платформы и оператора полезной нагрузки оснащен носимым комплексом управления, содержащим встроенные в экипировку военнослужащих модули: вычислительный модуль, модуль электропитания, модуль радиосвязи, модули инерциально-магнитной и спутниковой навигации, а также отдельные модули многофункционального и оперативного пультов управления, модуль радиосвязи выполнен с возможностью обеспечения радиообмена речевыми сообщениями и данными между военнослужащими расчета и приема/передачи управляющей и телеметрической информации по радиоканалу связи с многоканальным ретранслятором, модули многофункционального и оперативного пультов управления выполнены с возможностью обеспечения управления военнослужащими встроенными модулями, командир дополнительно оснащен дальномерно-угломерным прибором разведки, персональным компьютером, выполненным с возможностью обеспечения управления действиями расчета, выбора и измерения координат цели, выбора огневой позиции и маршрута выдвижения платформы, целеуказания расчету и контроля результатов поражения цели, а также при переноске комплектом запасных аккумуляторных батарей, бортовой системой управления и передачи информации, бортовой системой технического зрения и средствами сопряжения с прибором разведки в походном положении, оператор платформы дополнительно оснащен пультом дистанционного управления движением, выполненным с возможностью обеспечения выведения платформы на огневую позицию и ориентирования платформы на цель, восстановления ориентации после выстрела (пуска ракеты) и возврата платформы на исходную позицию, а также при переноске платформой с комплектом аккумуляторных батарей, многоканальным ретранслятором и катушкой с световодом волоконно-оптического канала связи в походном положении, оператор полезной нагрузки дополнительно оснащен пультом дистанционного управления полезной нагрузкой, выполненным с возможностью обеспечения установок, поправок и точек прицеливания, наведения средства огневого поражения на цель, производства выстрела (пуска), восстановления наводки, а также при переноске бортовым модулем полезной нагрузки с средством огневого поражения в походном положении.
Существенными отличительными признаками заявляемого изобретения по сравнению с прототипом являются:
1. Исполнение роботизированной платформы с комплектом аккумуляторных батарей бортовой системы электропитания, бортовой системы управления и передачи информации, бортовой системы технического зрения с возможностью раздельной переноски двумя военнослужащими и последующей сборки на исходной позиции обеспечивает оперативность развертывания, живучесть и тактическую гибкость применения заявляемого робототехнического комплекса в маневренном наступательном бою.
Значительные массогабаритные характеристики и моноблочное исполнение прототипа, требующие специальных средств доставки, исключают возможность раздельной переноски его компонентов пешими военнослужащими.
2. Наличие в составе робототехнического комплекса переносимого многоканального ретранслятора, предназначенного для дублированной приема-передачи управляющей и телеметрической информации по радио- и волоконно-оптическому (обладающему практически абсолютной помехозащищенностью) каналам связи с бортовыми средствами приема/передачи данных обеспечивает надежное и устойчивое боевое функционирование дистанционно управляемой платформы. Важной является возможность установки ретранслятора вблизи огневой позиции платформы без необходимости передового выдвижения военнослужащих, что гарантирует сохранность их жизней.
В прототипе упоминаются только бортовые радиосредства приема/передачи данных. Переносимый многоканальный ретранслятор не предусмотрен.
3. Оснащение расчета военнослужащих в составе командира, оператора платформы и оператора полезной нагрузки встроенным в экипировку военнослужащих носимым комплексом управления обеспечивает их согласованное взаимодействие по управлению платформой на всех этапах подготовки и применения робототехнического комплекса. При этом модульное исполнение компонентов носимого комплекса управления (вычислительный модуль, модуль электропитания и др.) позволяет оптимально распределить весовую нагрузку на каждом военнослужащем, обеспечивая удобство и свободу действий.
В прототипе оснащение военнослужащих расчета носимыми средствами управления не предусмотрено.
4. Исполнение модуля радиосвязи с возможностью обеспечения радиообмена речевыми сообщениями и данными между военнослужащими расчета и приема/передачи управляющей и телеметрической информации по радиоканалу связи с многоканальным ретранслятором позволяет образовать единую постоянно действующую высокоскоростную динамическую сеть, узлами которой являются военнослужащие, ретранслятор и (через ретранслятор) роботизированная платформа.
В прототипе такой возможности нет.
5. Модули многофункционального и оперативного пультов управления выполнены с возможностью обеспечения управления военнослужащими встроенными модулями. Первый из них обеспечивает полнофункциональное, а второй - упрощенное управление носимым комплексом управления в экстремальных условиях.
В прототипе такая задача не рассматривается.
6. Оснащение командира дальномерно-угломерным прибором разведки позволяет оперативно и достоверно доводить разведданные о цели непосредственно до лица, принимающего решения (командира), без промежуточных звеньев приема/передачи. Этим также обеспечивается высокая живучесть средства разведки на поле боя, что определяется спецификой действий командира в пеших боевых порядках (скрытность, защищенная позиция).
В прототипе средствами разведки оснащается бортовой модуль полезной нагрузки платформы (модуль стрелково-гранатометного вооружения по терминологии прототипа), огневая позиция которого соприкасается с позициями средств поражения противника. В результате снижается оперативность и достоверность разведданных, а также живучесть разведсредств.
7. Наличие персонального компьютера командира, выполненного с возможностью обеспечения управления действиями расчета, выбора и измерения координат цели, выбора огневой позиции и маршрута выдвижения платформы, целеуказания расчету и контроля результатов поражения цели, позволяет оперативно и эффективно решать широкий перечень тактических задач при подготовке и ведении боя.
В прототипе персональный компьютер командира не предусмотрен.
8. Функция переноски командиром комплекта запасных аккумуляторных батарей, бортовой системы управления и передачи информации, бортовой системы технического зрения и средств сопряжения с прибором разведки в походном положении обеспечивает возможность применения робототехнического комплекса в пеших боевых порядках.
В прототипе данная функция не реализуется.
9. Оснащение оператора платформы пультом дистанционного управления движением обеспечивает выведение платформы на огневую позицию и ориентирование платформы на цель, восстановление ориентации после выстрела (пуска ракеты) и возврат платформы на исходную позицию. Согласованная работа данного пульта и пульта дистанционного управления полезной нагрузкой, которым оснащен оператор полезной нагрузки и который выполнен с возможностью обеспечения определения установок, поправок и точек прицеливания, наведения средства огневого поражения на цель, производства выстрела (пуска), восстановления наводки, позволяет операторам слаженно выполнять совместные действия по управлению движением и ориентированию платформы и прицельному применению средства огневого поражения.
В прототипе используется один пульт дистанционного управления, функции и возможности которого не определены.
10. Функция переноски оператором платформы роботизированной платформы с комплектом аккумуляторных батарей, многоканального ретранслятора и катушки с световодом волоконно-оптического канала связи и оператором полезной нагрузки бортового модуля полезной нагрузки с средством огневого поражения в походном положении обеспечивает возможность применения робототехнического комплекса в пеших боевых порядках.
В прототипе данная функция не реализуется.
Приведенные отличительные признаки позволяют расширить функциональные возможности робототехнического комплекса за счет следующих технических результатов:
- повышение устойчивости и оперативности управления;
- снижение массогабаритных характеристик;
- повышение живучести и удобства применения;
- расширение состава решаемых тактических задач.
В совокупности указанные технические результаты обеспечивают получение общего технического результата, заключающегося в повышении эффективности робототехнического комплекса, характеризующей степень приспособленности комплекса к выполнению задач огневой поддержки и боевого обеспечения пешими подразделениями нижнего тактического звена.
Заявляемый робототехнический комплекс иллюстрируют следующие графические материалы:
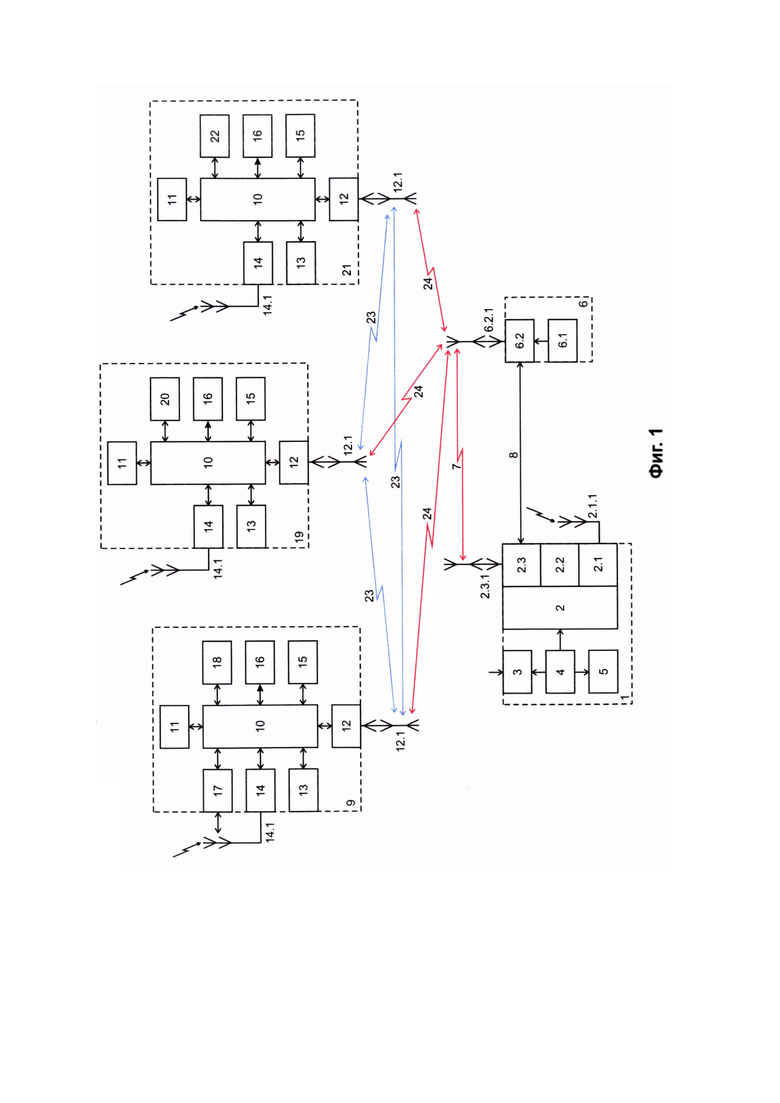
Фиг. 1. Структурная схема переносного робототехнического комплекса (гусеничное шасси платформы с электроприводом не показано), где:
1. Роботизированная платформа.
2. Бортовая система управления и передачи информации:
2.1. Средства инерциально-спутниковой навигации и ориентации:
2.1.1. Приемная антенна сигналов спутниковых навигационных систем (СНС).
2.2. Исполнительные устройства.
2.3. Средства приема/передачи данных:
2.3.1. Приемо-передающая антенна.
3. Бортовая система технического зрения.
4. Бортовая система электропитания.
5. Бортовой модуль полезной нагрузки с средством огневого поражения цели.
6. Переносимый многоканальный ретранслятор:
6.1. Автономный источник электропитания.
6.2. Приемо-передающий модуль:
6.2.1. Приемо-передающая антенна.
7. Линия радиоканала связи ретранслятора с средствами приема/передачи данных.
8. Линия волоконно-оптического канала связи ретранслятора с средствами приема/передачи данных.
9. Приборное оснащение командира.
10. Вычислительный модуль.
11. Модуль электропитания.
12. Модуль радиосвязи:
12.1. Приемо-передающая антенна.
13. Модуль инерциально-магнитной навигации.
14. Модуль спутниковой навигации:
14.1. Приемная антенна сигналов СНС.
15. Модуль многофункционального пульта управления.
16. Модуль пульта оперативного управления.
17. Дальномерно-угломерный прибор разведки.
18. Персональный компьютер.
19. Приборное оснащение оператора платформы.
20. Пульт дистанционного управления движением.
21. Приборное оснащение оператора полезной нагрузки.
22. Пульт дистанционного управления полезной нагрузкой.
23. Линия канала радиообмена между военнослужащими.
24. Линия радиоканала связи модуля радиосвязи с ретранслятором.
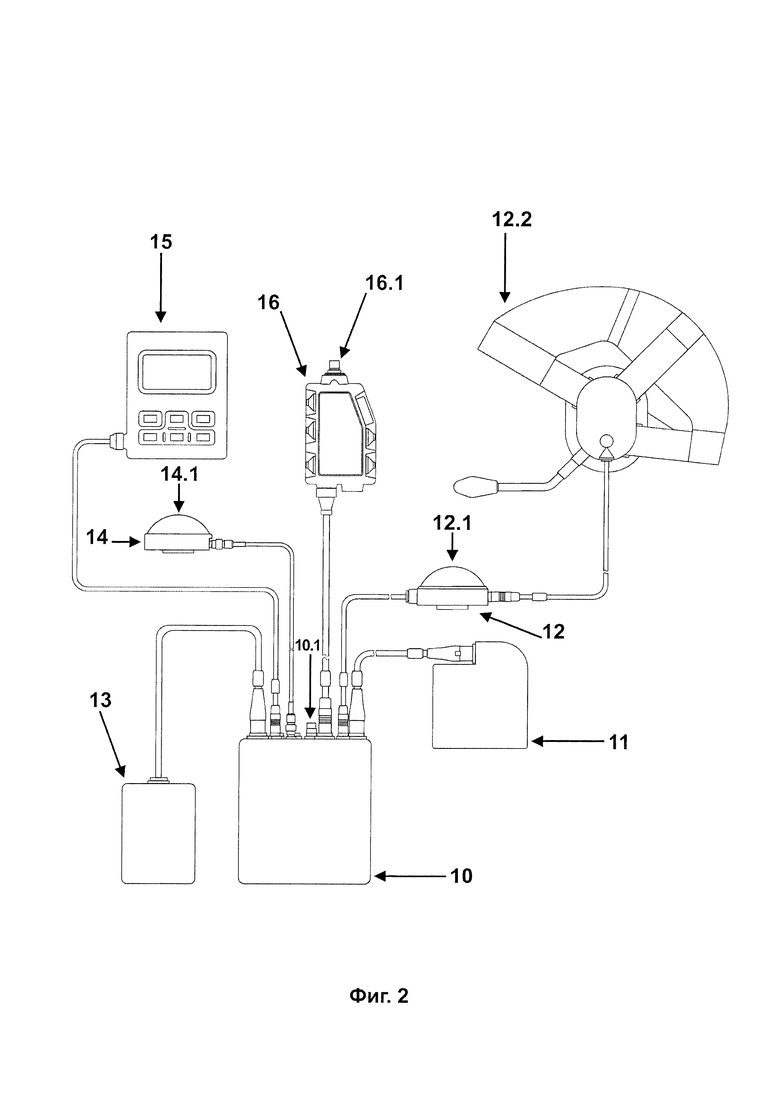
Фиг. 2. Модули носимого комплекса управления и связи между ними (модулями оснащается каждый военнослужащий расчета), где:
10. Вычислительный модуль:
10.1. Разъем (на схеме, Фиг. 1, не показан).
11. Модуль электропитания.
12. Модуль радиосвязи:
12.1. Приемо-передающая антенна (под радиопрозрачным обтекателем).
12.2. Телефонно-микрофонная гарнитура с оголовком (на схеме, Фиг. 1, не показана).
13. Модуль инерциально-магнитной навигации.
14. Модуль спутниковой навигации:
14.1. Приемная антенна сигналов СНС (под радиопрозрачным обтекателем).
15. Модуль многофункционального пульта управления.
16. Модуль пульта оперативного управления:
16.1. Разъем (на схеме, Фиг. 1, не показан).
Примечание - Разъем 10.1 предназначен для подключения к модулю 10 компьютера 18, пультов дистанционного управления 20 или 22 соответственно командира, оператора платформы и оператора полезной нагрузки. Разъем 16.1 - для подключения прибора разведки 17 командира. Реализуется сквозное через модуль 16 прямое подключение прибора 17 к модулю 10.
Фиг. 3. Робототехнический комплекс в походном положении, где:
1. Роботизированная платформа с комплектом аккумуляторных батарей бортовой системы электропитания 4.
2. Бортовая система управления и передачи информации.
3. Бортовая система технического зрения.
5. Бортовой модуль полезной нагрузки с средством огневого поражения (пример носимого реактивного пехотного огнемета 2хРПО-А «Шмель»).
6. Переносимый многоканальный ретранслятор:
6.2.2. Катушка с световодом волоконно-оптического канала связи (на схеме, Фиг. 1, не показана).
12. Модуль радиосвязи (остальные модули носимого комплекса управления не показаны).
17. Дальномерно-угломерный прибор разведки.
18. Персональный компьютер.
20. Пульт дистанционного управления движением.
22. Пульт дистанционного управления полезной нагрузкой.
25. Комплект запасных аккумуляторных батарей.
26. Средства сопряжения с прибором разведки.
Примечание - Компоненты 25, 26 на схеме, Фиг. 1, не показаны.
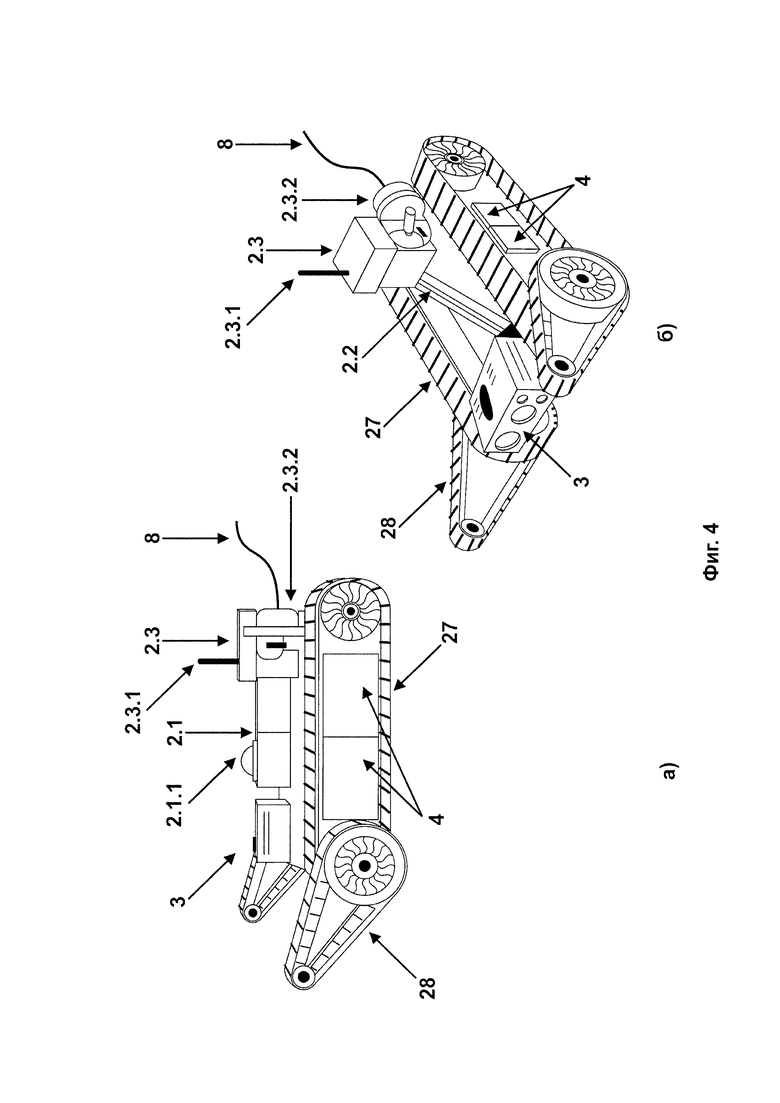
Фиг. 4. Роботизированная платформа в собранном положении (а) - вид сбоку, б) - вид в аксонометрической проекции), где:
2.1. Средства инерциально-спутниковой навигации и ориентации (на Фиг. 4б) не показаны):
2.1.1. Приемная антенна сигналов СНС (под радиопрозрачным обтекателем).
2.2. Исполнительные устройства (на Фиг. 4а) не показаны).
2.3. Средства приема/передачи данных:
2.3.1. Приемо-передающая антенна.
2.3.2. Катушка с световодом волоконно-оптического канала связи (на схеме, Фиг. 1, не показана).
3. Бортовая система технического зрения в виде оптико-электронной системы переднего обзора.
4. Бортовая система электропитания в виде комплекта аккумуляторных батарей.
8. Линия волоконно-оптического канала связи ретранслятора с средствами приема/передачи данных.
27. Основная ведущая гусеничная лента.
28. Дополнительная передняя гусеничная лента (флиппер).
Примечание - Катушка 6.2.2 (см. Фиг. 3) входит в состав ретранслятора 6, катушка 2.3.2 - в состав средств 2.3. Возможен вариант исполнения средств 2.3 без катушки 2.3.2. В этом случае свободный конец оптического волокна подключается непосредственно к входным цепям оптического приемопередающего тракта средств 2.3. Бортовой модуль полезной нагрузки 5 на Фиг. 4 не показан.
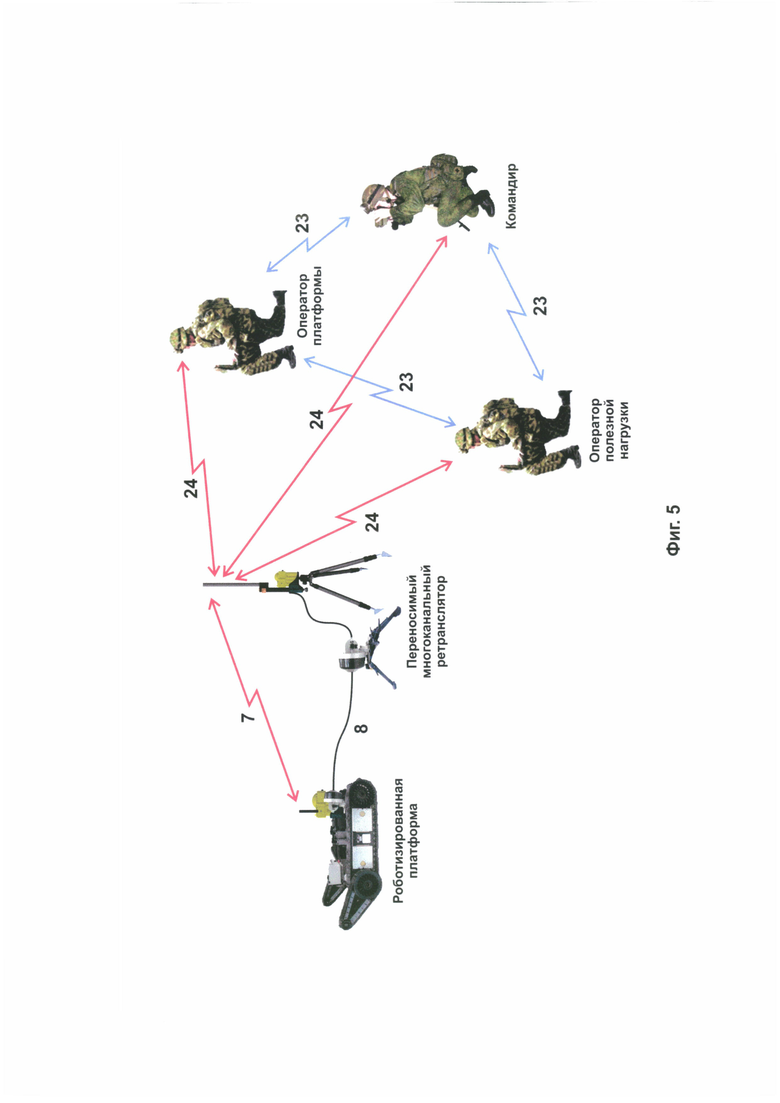
Фиг. 5. Схема применения переносного робототехнического комплекса.
Примечание - Схема, Фиг. 5, носит условный характер. На практике протяженность линии связи 8 составляет от 500 до 1000 м, линий связи 7, 23, 24 - не менее 1, 5 км. Массогабаритные характеристики платформы грузоподъемностью от 30 кг, ее бортового оснащения, средств огневого поражения и ретранслятора соответствуют требованию возможности переноски военнослужащими. Военнослужащие расчета скрытно размещаются на местности, используя естественные и искусственные укрытия. Их преимущественное положение - полулежа.
Рассмотрим функции и возможность реализации компонентов заявляемого комплекса. Рассмотрение начнем с модулей 10-16, широко представленных в структуре переносного робототехнического комплекса (см. Фиг. 1, 2).
Практическая реализация модулей не представляет сложности, поскольку они являются типовыми устройствами с функциями, соответствующими названиям, и известными способами построения.
Вычислительный модуль 10 выполняет функцию сбора, хранения, обработки и распространения информации, поступающей от других модулей носимого комплекса управления, а также информационного обмена с прибором разведки 17, персональным компьютером 18 или одним из пультов дистанционного управления 20, 22. Также модуль 10 осуществляет преобразование первичной электроэнергии модуля электропитания 11 во вторичные питающие напряжения других модулей и компонентов 17, 18, 20, 22 (при отсутствии у последних автономных источников электропитания). Примером реализации модуля 10 является СнК (система-на-кристалле) SmartFusion2 с энергонезависимой матрицей ПЛИС, выполненной по Flash-технологии, и процессорной подсистемой на базе процесса ARM Cortex М3.
Модуль радиосвязи 12 совместно с такими же модулями других военнослужащих, средствами приема/передачи данных платформы 2.3 и ретранслятором 6 образуют единую постоянно действующую высокоскоростную динамическую сеть (MANET-сеть), например, на основе известного стандарта 802.11/b/g/n с использованием широкодоступных адаптеров. Функцией образованной радиосети является обеспечение обмена речевыми сообщениями (задействуются гарнитуры 12.2) и данными между военнослужащими и управляющей и телеметрической информацией между пультами дистанционного управления (при необходимости персональным компьютером) и системой управления и передачи информации платформы. Содержанием управляющей информации (прямой канал «пульт управления-платформа») являются команды, управляющие движением платформы, ее ориентацией, прицельным применением средства огневого поражения и др., телеметрической информации (обратный канал «платформа- пульт управления») - сигналы квитирования команд, параметры состояния бортовых систем, местоположение платформы, видеоданные от системы технического зрения и др.
Совместное применение модулей 13, 14, реализующих известные способы инерциально-магнитной и спутниковой навигации (например, способ определения местоположения наземного подвижного объекта [5]) обеспечивает функцию высокоточного определения плановых координат X, Y, широты В, долготы L и высоты Н (координаты Z) военнослужащих на поле боя в системе координат СК-42 или какой-либо другой системе отсчета (например, ПЗ-90.11 или WGS-84). Модуль 13, представляющий собой бесплатформенную инерциальную навигационную систему (БИНС), реализуется в виде выполненного по МЭМС-технологии типового инерциального измерительного устройства (Inertial measurement unit, IMU), такого как комбинированные датчики STIM300 компании Sensonor или MPU9255 компании InvenSens. Примером исполнения модуля 14 является малогабаритный навигационный приемник МНП-М7 АО «Ижевский радиозавод».
Модули многофункционального 15 и оперативного 16 пультов управления, выполненные в виде отдельных компактных корпусированных устройств, реализуют функцию ввода информации и управления встроенными в экипировку военнослужащего модулями, а также подключаемыми внешними устройствами. Модуль 16 используется на этапе боевых действий и предназначен для включения/выключения аппаратуры, подачи сигнала о ранении, переключения тангеты, начала передачи цифровых данных и выбора типа внешнего устройства (прибор разведки, компьютер, пульт дистанционного управления). Модуль 15 задействуется на подготовительном этапе для задания режимов и индикации результатов работы модулей и внешних устройств. Режимы работы определяют выбор используемых СНС (ГЛОНАСС, GPS и др.), варианты маршрутов движения платформы и военнослужащих, параметры и режимы работы подключаемых внешних устройств, индикацию разряда модуля электропитания и др.
Ключевым компонентом заявляемого робототехнического комплекса является роботизированная дистанционно управляемая платформа 1 (см. Фиг. 4). Главная функция платформы состоит в обеспечении доставки на огневую позицию и прицельного применения средства огневого поражения цели.
Возможны различные варианты практической реализации платформы. Так, платформа может быть исполнена по технологии, разработанной компанией iRobot Corporation [6]. Подобный вариант платформы предусмотрен на Фиг. 3-5. Из отечественных разработок наиболее близкой по характеристикам к требуемым параметрам платформы заявляемого комплекса является универсальная платформа малогабаритного робототехнического комплекса «Капитан» ЦНИИ РТК. Во всех случаях роботизированная платформа должна выполняться в габаритах, пригодных для переноски пешим военнослужащим.
Средства инерциально-спутниковой навигации и ориентации 2.1 по выполняемой функции и реализуемым способам аналогичны модулям 13, 14, размещаемым на военнослужащих. Отличие состоит в более полном применении определяемых БИНС углов тангажа и крена платформы для ее ориентирования на цель и наведения средства огневого поражения, тогда как при навигации военнослужащего эти углы играют вспомогательную роль. Поэтому реализация средств 2.1 аналогична исполнению модулей 13, 14. Этим достигается унификация компонентов робототехнического комплекса.
Исполнительные устройства 2.2 строятся по схеме, основными механическими компонентами которой являются несущий корпус с моторным и аккумуляторным (для установки бортовой системы электропитания 4) отделениями, ходовая часть с гусеничным движителем, правый и левый электроприводы, редукторы передачи крутящего момента. Примером реализации служит исполнительное устройство перемещения ОАО «Завод имени В.А Дегтярева» [7].
Средства приема/передачи данных 2.3, выполняя ту же функцию, что и модуль радиосвязи 12 в части обмена управляющей и телеметрической информацией (линия радиоканала связи 7), строятся на основе комплектующих прежнего стандарта 802.11/b/g/n. Аналогично реализуется ретранслятор 6 (приемо-передающий модуль 6.2), входящий в состав радиоканала связи линии 24. Однако, в отличие от всенаправленной плоской приемо-передающей антенны 12.1 модуля 12, здесь используются штыревые приемо-передающие антенны 2.3.1, 6.2.1. Эти антенны, обладая большим коэффициентом усиления в горизонтальной плоскости (плоскости поля боя), обеспечивают большую дальность действия линий радиоканалов связи 7, 24. Такое решение также способствует унификации компонентов робототехнического комплекса.
Тактика применения роботизированной платформы на поле боя (см. Фиг. 5) предусматривает ее поступательное движение «вперед-назад» без интенсивного маневрирования по курсу в ограниченном диапазоне допустимых углов тангажа и крена. В результате требуемый объем видеоданных, передаваемых в составе телеметрической информации, ограничивается стабилизированным видеоизображением находящихся впереди платформы объектов. Этого достаточно для преодоления несложных подъемов и спусков, объезда опасных предметов и препятствий. В таких условиях бортовая система технического зрения 3 может быть выполнена в виде оптико-электронной системы переднего обзора. Примером исполнения является адаптированный для установки на механическую платформу комплект панорамной видеокамеры (например, ZENMUSE Х3) с электронным стабилизатором Osmo компании DJI.
Перечень источников электроэнергии в составе робототехнического комплекса включает бортовую систему электропитания 4, модуль электропитания 11 (в количестве трех экземпляров), автономный источник электропитания 6.1, а также автономные (более предпочтительный вариант) блоки электропитания компьютера 18 и пультов 20, 22 (не показаны на схеме, Фиг. 1). Требование унификации предусматривает исполнение указанных источников на общей элементной базе. Проведенный анализ показывает, что их реализация целесообразна на основе линейки литий-ионных аккумуляторов MPxtd компании Saft. По производительности (энергоемкости), рабочему температурному диапазону, массогабаритным характеристикам оптимальным среди них является аккумулятор MP174565xtd.
Источники включают разное количество аккумуляторов. По предварительной оценке модуль электропитания 11 должен состоять из двух последовательно включенных параллельных пар аккумуляторов. По такой же схеме строятся блоки электропитания компьютера 18 и пультов 20, 22. Для менее энергоемкого источника 6.1 достаточно двух последовательных аккумуляторов. Бортовая система электропитания 4 может включать несколько десятков таких аккумуляторов в зависимости от энергопотребления ходовой части с движителем, электроприводов, редукторов и других бортовых систем платформы. Малые массогабариты аккумуляторов позволяют изготовить компактный образец системы электропитания 4.
Бортовой модуль полезной нагрузки 5 включает универсальное устройство установки и крепления средства поражения, дистанционно управляемый прицельно-спусковой механизм и собственно съемное средство огневого поражения цели. Помимо упомянутого ранее реактивного пехотного огнемета сменный состав средств поражения может включать другие образцы стрелкового оружия и средств ближнего боя (в т.ч. реактивные гранатометы и огнеметы, переносные ПТРК, самозарядные снайперские винтовки и т.д.), а также инженерные боеприпасы с дистанционным подрывом. Для разведки целей и координатного обеспечения корректировки огня артиллерии и наведения авиации платформа может оснащаться лазерным целеуказателем-дальномером, а также трехдиапазонным передатчиком помех направленного действия для подавления радиоканалов противника. Возможна установка других специальных технических средств. Конкретный тип устанавливаемого средства выбирается исходя из решаемой боевой задачи.
Линия волоконно-оптического канала связи 8 строится по типовой схеме, включающей оптический кабель с числом волокон, необходимым для обеспечения дуплексной связи ретранслятора 6 с средствами приема/передачи данных 2.3, оптические кроссы для подключения кабеля к оконечным устройствам (входным цепям оптических приемо-передающих трактов модуля 6.2 и средств 2.3), мультиплексоры и демультиплексоры для спектрального разделения каналов, регенераторы для восстановления импульсов на приемных концах линии, лазеры в качестве передатчиков и фотопремники, модуляторы и усилители. Названные элементы широко представлены на рынке услуг по проектированию и монтажу волоконно-оптических линий связи. Особенность состоит в дополнительном использовании катушек 6.2.2, 2.3.2, по принципу действия аналогичных безинерционной рыболовной катушке с фрикционным тормозом. Это необходимо для безопасного стравливания оптического волокна по мере движения платформы.
Дальномерно-угломерный прибор разведки 17 предназначен для измерения сферических координат цели (дальность, дирекционный угол, угол места) с последующим пересчетом в прямоугольные или географические координаты. В его качестве может использоваться прибор разведки ПДУ-4 производства АО «ЦНИИТОЧИАШ». Другим вариантом исполнения является электронный угломерный блок из состава носимого комплекта аппаратуры топогеодезической привязки и формирования целеуказаний [8], совмещенный с лазерным дальномером (например, лазерным дальномерным модулем IWT LRF905/1550). Возможно применение других носимых оптико-электронных средств разведки.
При реализации персонального компьютера 18 и пультов дистанционного управления 20, 22 необходима их взаимозаменяемость, что требует идентичности аппаратно-программного исполнения. Это обусловлено возникающими при боевых действиях изменениями условий применения робототехнического комплекса (потеря части личного состава и аппаратных средств, экстренная вводная по новой цели, срочная передислокация и др.), что приводит к перераспределению задач и ролей между военнослужащими.
Аппаратная составляющая рассматриваемых компьютера и пультов может быть реализована аналогично вычислительному модулю 10. Программная составляющая может строиться на основе операционной системы Linux 5.x и включает программные модули, обеспечивающие выполнение следующих функций:
- управления действиями расчета, выбора и измерения координат цели, выбора огневой позиции и маршрута выдвижения платформы, целеуказания расчету и контроля результатов поражения цели;
- выведения платформы на огневую позицию и ориентирования платформы на цель, восстановления ориентации после выстрела (пуска) и возврата на исходную позицию;
- определения установок, поправок и точек прицеливания, наведения средства огневого поражения на цель, производства выстрела (пуска), восстановления наводки.
Модули инициализируются в зависимости от текущих задач и роли военнослужащих в составе расчета.
Работа переносного робототехнического комплекса подробно отражена в отличительных признаках заявляемого изобретения, рисунках (Фиг. 1-5) и примечаниях к ним, а также при анализе функций и возможности реализации компонентов комплекса. Дополнительно отметим, что рассмотренные возможности и действия комплекса достижимы благодаря непрерывному контролю местоположения его компонентов на поле боя, обеспечиваемому применяемыми средствами инерциально-спутниковой навигации и постоянно действующей высокоскоростной MANET-сетью.
Таким образом, заявляемый переносный робототехнический комплекс огневой поддержки и боевого обеспечения может быть реализован и позволяет повысить устойчивость и оперативность управления, живучесть и удобство применения, снизить массогабаритные характеристики и расширить состав решаемых тактических задач.
Источники информации:
1. Патент RU 2678553.
2. https://ucrazy.ru/interesting/1290621467-boevyeplatformytalon swordsimaars.html
3. Патент RU 2533229.
4. Патент RU 2686983.
5. Патент RU 2697859.
6. Патент US 7556108 В2.
7. Патент RU 2643059.
8. Патент RU 2661676.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| Мобильный роботехнический комплекс | 2024 |
|
RU2828909C1 |
| Робототехнический комплекс для ведения разведки и огневой поддержки | 2017 |
|
RU2686983C2 |
| КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОГО ПОРАЖЕНИЯ ЦЕЛЕЙ НА ОСНОВЕ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2759534C1 |
| Способ комплексного применения роботизированных средств огневого поражения и радиоэлектронного подавления системы активной защиты бронетехники | 2020 |
|
RU2746772C1 |
| Система управления многофункционального робототехнического комплекса обеспечения боевых действий | 2016 |
|
RU2652329C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| Способ подсвета цели для обеспечения применения боеприпасов с лазерной полуактивной головкой самонаведения | 2021 |
|
RU2755134C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |

Роботизированная платформа комплекса и ее бортовые системы электропитания, управления и передачи информации, технического зрения выполнены с возможностью переноски и сборки военнослужащими. В состав комплекса включены переносимый ретранслятор с радио- и волоконно-оптическим каналами связи, а также носимые аппаратно-программные средства управления платформой, средствами огневого поражения и военнослужащими расчета. Робототехнический комплекс позволяет повысить устойчивость и оперативность управления, живучесть и удобство применения, снизить массогабаритные характеристики и расширить состав решаемых тактических задач. Обеспечивается повышение эффективности робототехнического комплекса на основе расширения функциональных возможностей и улучшения приспособленности к решению задач по назначению в пеших боевых порядках. 5 ил.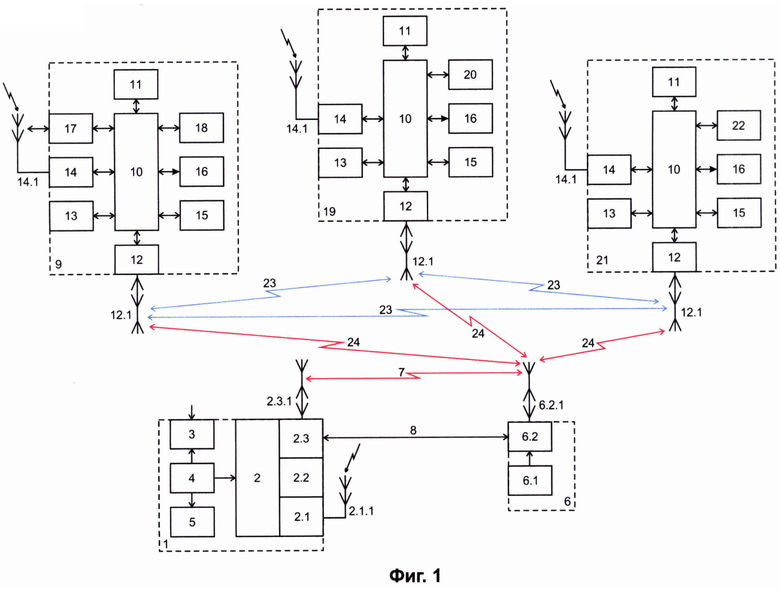
Способ обеспечения возможности применения и переноски робототехнического комплекса огневой поддержки и боевого обеспечения, содержащего роботизированную дистанционно управляемую платформу на базе гусеничного шасси с электроприводом, оснащенную бортовой системой управления и передачи информации в составе исполнительных устройств, средств инерциально-спутниковой навигации и ориентации и средств приема/передачи данных, бортовой системой технического зрения, бортовой системой электропитания, бортовым модулем полезной нагрузки со средством огневого поражения цели,
характеризующийся, тем что
выполняют роботизированную платформу с комплектом аккумуляторных батарей бортовой системы электропитания, бортовую систему управления и передачи информации, бортовую систему технического зрения с возможностью раздельной переноски двумя военнослужащими и последующей сборки на исходной позиции,
обеспечивают робототехнический комплекс переносимым многоканальным ретранслятором, выполненным с возможностью обеспечения приема/передачи управляющей и телеметрической информации по радио- и волоконно-оптическому каналам связи с бортовыми средствами приема/передачи данных,
оснащают расчет военнослужащих в составе командира, оператора платформы и оператора полезной нагрузки носимым комплексом управления, содержащим встроенные в экипировку военнослужащих модули: вычислительный модуль, модуль электропитания, модуль радиосвязи, модули инерциально-магнитной и спутниковой навигации, а также отдельные модули многофункционального и оперативного пультов управления,
выполняют модуль радиосвязи с возможностью обеспечения радиообмена речевыми сообщениями и данными между военнослужащими расчета и приема/передачи управляющей и телеметрической информации по радиоканалу связи с многоканальным ретранслятором,
выполняют модули многофункционального и оперативного пультов управления выполнены с возможностью обеспечения управления военнослужащими встроенными модулями,
обеспечивают командира дальномерно-угломерным прибором разведки, персональным компьютером, выполненным с возможностью обеспечения управления действиями расчета, выбора и измерения координат цели, выбора огневой позиции и маршрута выдвижения платформы, целеуказания расчету и контроля результатов поражения цели, а также при переноске комплектом запасных аккумуляторных батарей, бортовой системой управления и передачи информации, бортовой системой технического зрения и средствами сопряжения с прибором разведки в походном положении,
обеспечивают оператора платформы пультом дистанционного управления движением, выполненным с возможностью обеспечения выведения платформы на огневую позицию и ориентирования платформы на цель, восстановления ориентации после выстрела или пуска ракеты и возврата платформы на исходную позицию, а также при переноске платформой с комплектом аккумуляторных батарей, многоканальным ретранслятором и катушкой со световодом волоконно-оптического канала связи в походном положении,
обеспечивают оператора полезной нагрузки пультом дистанционного управления полезной нагрузкой, выполненным с возможностью обеспечения установок, поправок и точек прицеливания, наведения средства огневого поражения на цель, производства выстрела или пуска ракеты, восстановления наводки, а также при переноске бортовым модулем полезной нагрузки со средством огневого поражения в походном положении.
| Робототехнический комплекс для ведения разведки и огневой поддержки | 2017 |
|
RU2686983C2 |
| Роботизированная платформа специального назначения | 2016 |
|
RU2640264C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| Конструкция уравнительного зажима контактных плит для электродуговых печей | 1950 |
|
SU87777A1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗВЕДКИ И ОГНЕВОЙ ПОДДЕРЖКИ | 2013 |
|
RU2548207C1 |
| US 7556108 B2, 07.07.2009. | |||

