Область техники, к которой относится изобретение
Изобретение относится к области мобильной робототехники и может быть использовано при создании гусеничных и колёсных мобильных роботов, оснащённых двигателем внутреннего сгорания.
Уровень техники
Из уровня техники [RU 170926 U1, опубликовано 15.05.2017] известен гусеничный снегоболотоход, трансмиссия которого включает два гидроцилиндра, соединённые с рулевым управлением, которые передают усилие на суппорта дисковых тормозов, расположенных раздельно на правой и левой гусеницах, тем самым осуществляя поворот. Недостатком данной трансмиссии является повышенный износ тормозов и их перегрев в процессе активного маневрирования.
Также из руководства по эксплуатации снегоболотохода «Пелец
Мини III» [https://pelec.ru/files/Instruction/ManualPMIIItb.pdf], обладающего аналогичной трансмиссией, известно, что повороты большого радиуса на такого рода машинах рекомендуется осуществлять по ломаной линии, что говорит о их недостаточной управляемости.
Для улучшения управляемости гусеничных транспортных средств, например танков, известна двухпоточная трансмиссия [RU 2652542 C1, опубликовано 26.04.2018]. Однако данная трансмиссия включается в себя блокировочный фрикцион, подверженный повышенному износу в процессе активного маневрирования, и ёмкостной накопитель электрической энергии, приводящий к дополнительному удорожанию производства трансмиссии данного типа.
В качестве пути отказа от фрикциона при осуществлении маневрирования из уровня техники [RU 2441792 C1, опубликовано 10.02.2012] известен механизм поворота, включающий в себя два дифференциала. Однако он требует дополнительного источника крутящего момента, для которого также необходим дополнительный источник энергии, что в сочетании с необходимостью второго дифференциала приводит к усложнению и удорожанию конструкции.
Из уровня техники [RU 2648652 C1, опубликовано 27.03.2018;
RU 2643903 C1, опубликовано 06.02.2018] известна электромеханическая трансмиссия машины с двигателем внутреннего сгорания, в которой механическая энергия, создаваемая двигателем внутреннего сгорания, преобразуется в электрическую энергию при помощи тягового генератора, а затем при помощи тяговых электродвигателей обратно преобразуется в механическую энергию вращения гусениц или ведущих колес. При этом механическая связь двигателя внутреннего сгорания и гусениц (или ведущих колес) отсутствует. Недостатком данной трансмиссии является необходимость наличия тягового генератора, что удорожает её производство. Также в трансмиссиях данного типа суммарная номинальная мощность тяговых электродвигателей должна быть сопоставима с номинальной мощностью двигателя внутреннего сгорания, так как механическая энергия двигателя внутреннего сгорания не может быть передана напрямую на гусеницы (или ведущие колеса). Это приводит в конечном счёте к удорожанию стоимости тяговых электродвигателей и тягового генератора по сравнению с системами, где такая связь присутствует, например
[RU 2652542 C1, опубликовано 26.04.2018].
Раскрытие сущности изобретения
Предлагаемое изобретение направлено на решение технической задачи по устранению перечисленных недостатков.
Достигаемый при этом технический результат заключается в хорошей управляемости при совершении поворотов большого радиуса, в отсутствии повышенного износа и/или перегрева фрикционных элементов тормозной системы в процессе активного маневрирования, в отсутствии необходимости использования дополнительных источников питания (например, тяговых генераторов) для создания момента торможения на валах, механически соединённых с гусеницами или ведущими колёсами, в возможности использования для осуществления торможения электродвигателей, чья суммарная номинальная мощность в два и более раз меньше, чем номинальная мощность двигателя внутреннего сгорания.
Технический результат достигается тем, что электромеханическая трансмиссия автономного мобильного робота с двигателем внутреннего сгорания характеризуется тем, что крутящий момент двигателя внутреннего сгорания передаётся на вход автоматической коробки передач, а выход автоматической коробки передач соединён с дифференциалом, каждый выходной вал которого механически соединён с гусеницей или ведущим колесом автономного мобильного робота, и с электродвигателем, используемым для электродинамического торможения, причём суммарная номинальная механическая мощность электродвигателей как минимум в два раза меньше номинальной мощности двигателя внутреннего сгорания, при этом для непосредственного создания тормозящего момента на валах электродвигателей не используется энергия какого-либо дополнительного источника питания.
Указанные признаки изобретения являются существенными и совокупность этих признаков достаточна для получения требуемого технического результата.
В одном из вариантов осуществления изобретения каждый выходной вал дифференциала может быть выполнен с возможностью дополнительного соединения с одним или несколькими фрикционными тормозами, которые используются для экстренного торможения и/или аварийного маневрирования автономного мобильного робота в случае отказа одного или нескольких электродвигателей, используемых для электродинамического торможения.
Краткое описание чертежа
Изобретение поясняется чертежом.
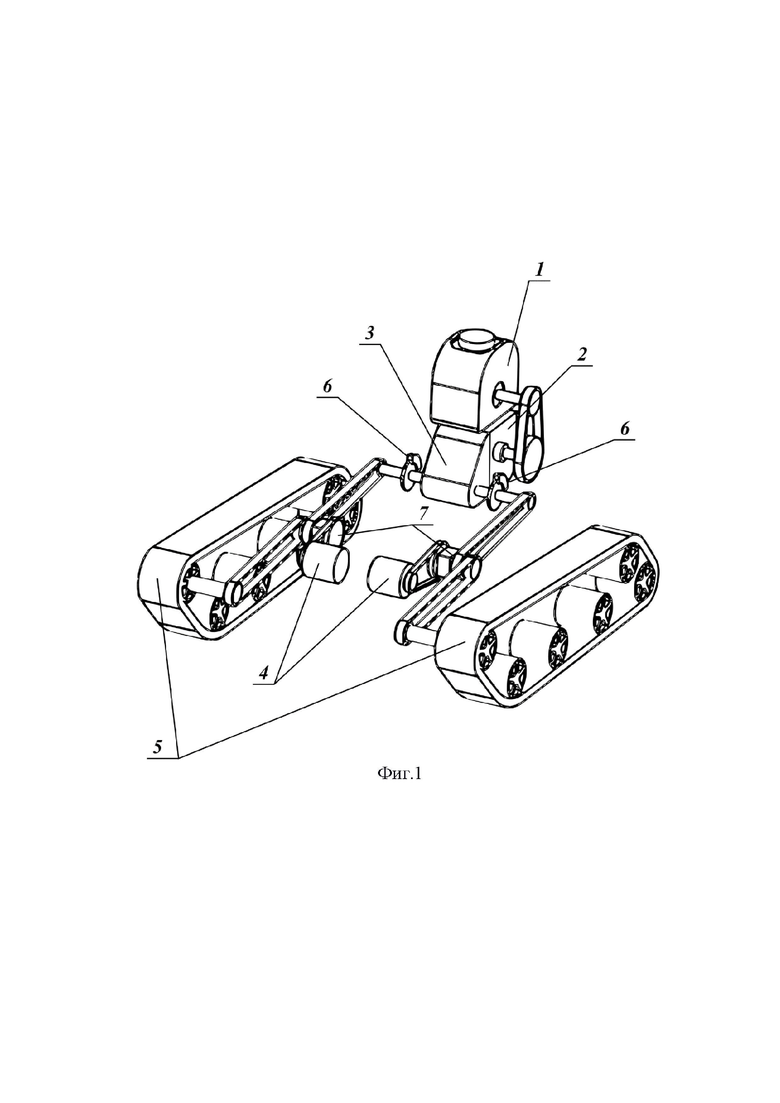
Для пояснения технической сущности, принципа действия и возможности осуществления предложенного изобретения на фиг.1 показан пример электромеханической трансмиссии автономного мобильного робота с двигателем внутреннего сгорания. Она содержит: 1 – двигатель внутреннего сгорания; 2 – автоматическую коробку передач; 3 – дифференциал;
4 – электродвигатели; 5 – гусеница (или ведущее колесо); 6 – опциональный фрикционный тормоз, 7 – механическая связь между выходным валом дифференциала, электродвигателем и гусеницей (или ведущим колесом).
Осуществление изобретения
Работает изобретение следующим образом: двигатель внутреннего сгорания 1 передаёт крутящий момент на автоматическую коробку передач 2, которая может быть выполнена любым известным из уровня техники способом, например при помощи вариатора, гидротрансформатора или роботизированной коробки передач с одним или несколькими сцеплениями. Выход автоматической коробки передач 2 поступает на дифференциал 3, который имеет как минимум два выходных вала, на которые распределяется крутящий момент, поступающий с автоматической коробки передач 2. Каждый выходной вал дифференциала 3 механически соединён с гусеницей (или ведущим колесом) 5 автономного мобильного робота и с электродвигателем 4, используемым для электродинамического торможения соединённых с ним гусеницы (или ведущего колеса) 5 автономного мобильного робота. Механическая связь 7 между выходным валом дифференциала, электродвигателем и гусеницей (или ведущим колесом) может быть реализована любым известным из уровня техники способом, например, при помощи одной или нескольких цепных передач, в том числе объединённых между собой повышающими или понижающими редукторами.
При прямолинейном движении обмотки электродвигатели 4 отключены от какой-либо нагрузки и не создают существенного тормозящего момента на выходных валах дифференциала 3. В случае необходимости поворота электродвигатели 4, механически соединённые с гусеницами (или ведущими колёсами) 5, установленными на том борту мобильного робота, в сторону которого необходимо осуществить поворот, переключаются в режим электродинамического торможения, который может быть достигнут любым известным из уровня техники способом, например при помощи подключения обмоток электродвигателя 4 к выпрямителю, выходы которого коммутируются между собой при помощи высокоскоростного транзистора. Тормозной момент, создаваемый электродвигателем 4, может плавно регулироваться, например, путём поддержания заданного тока в обмотке электродвигателя 4 в процессе электродинамического торможения, обеспечивая тем самым плавный поворот автономного мобильного робота. Для обеспечения достаточного тормозного момента на низких скоростях движения автономного мобильного робота механическая связь между выходным валом дифференциала 3 и электродвигателя 4 может включать в себя, например, повышающий редуктор. Также для повышения тормозного момента на низких скоростях движения автономного мобильного робота электродвигатели 4 могут быть выбраны с малыми значениями индуктивности и сопротивления обмоток управления. Электропитание электронного оборудования автономного мобильного робота, в том числе используемого для управления процессами электродинамического торможения электродвигателями 4 и переключения автоматической коробки передач 2, может быть организовано от дополнительного источника питания, например маломощного генератора, механически соединённого с выходным валом двигателя внутреннего сгорания 1. В то же время изобретение характеризуется тем, что для непосредственного создания тормозящего момента на валах электродвигателей 4 используется только индуцированная в них противо-ЭДС и не используется энергия какого-либо дополнительного источника питания. Также изобретение характеризуется тем, что суммарная номинальная механическая мощность электродвигателей 4 как минимум в два раза меньше номинальной мощности двигателя внутреннего сгорания 1. В частном варианте реализации изобретения каждый выходной вал дифференциала 3 может быть дополнительно соединён с одним или несколькими фрикционными тормозами 6, что позволяет обеспечить экстренное торможение во всём диапазоне скоростей, а также создаёт резервный контур управления в случае отказа электродвигателей 4 или электроники, управляющей процессом электродинамического торможения. В то же время изобретение характеризуется тем, что фрикционные тормоза 6 не используются для маневрирования автономного мобильного робота в штатных условиях эксплуатации.
Работоспособность изобретения была проверена на макете, который наглядно продемонстрировал получение требуемого технического результата. Макет включал в себя автономный мобильный робот, созданный на базе вездехода Пелец Мини 3, трансмиссия которого была модифицирована в соответствии с формулой изобретения. В качестве двигателя внутреннего сгорания был использован Honda IGX800, в качестве автоматической коробки передачи были использованы последовательно соединённые вариатор вездехода Пелец Мини 3 и автоматическая коробка передач Jatco F414E. Последняя серийно производится в едином корпусе с дифференциалом, выходные валы которого при помощи цепных передач были соединены с гусеницами автономного мобильного робота или электродвигателями, используемыми для электродинамического торможения. В качестве электродвигателей были использованы синхронные двигатели QS Motor 2000W 120 70H Mid Drive, чьи обмотки были подключены к трёхфазному выпрямителю, выходы которого коммутировались высокоскоростным транзистором. Поддержание заданного тормозного момента в процессе электродинамического торможения обеспечивалось за счёт регулирования тока на выходе выпрямителя при помощи пропорционально-интегрального регулятора. Механическая связь между выходными валами дифференциала и электродвигателями представляла из себя повышающий редуктор с коэффициентом редукции 5:1.
В ходе проведённых с использованием макета экспериментов была продемонстрирована возможность поддержания заданного тормозящего момента в диапазоне скоростей от 3 до 20 км/ч, что обеспечило хорошую управляемость гусеничного мобильного робота, в том числе при совершении поворотов большого радиуса. При этом в процессе активного маневрирования не использовались какие-либо фрикционные элементы тормозной системы, что позволило обеспечить отсутствие их повышенного износа и/или перегрева. В процессе проведения экспериментов для создания момента торможения на валах, механически соединённых с гусеницами, не использовались дополнительные источники питания (например, тяговые генераторы). Тормозной момент в электродвигателях создавался исключительно за счёт индуцированной в них противо-ЭДС. Суммарная номинальная мощность использованных электродвигателей составила 4 кВт, что в 4.45 раз меньше, чем номинальная мощность используемого двигателя внутреннего сгорания, которая составила 17.8 кBт.
Аналогичные результаты были получены на макете, основанном на заднеприводной четырёх колёсной мобильной платформе с двигателем внутреннего сгорания номинальной мощностью 9.5 кВт. Так, в ходе проведённых экспериментов была продемонстрирована хорошая управляемость колёсного мобильного робота при совершении поворотов малого и большого радиуса, при этом в процессе активного маневрирования не использовались какие-либо фрикционные элементы тормозной системы, что позволило обеспечить отсутствие их повышенного износа и/или перегрева. В процессе проведения экспериментов для создания момента торможения на валах, механически соединённых с ведущим колёсами, не использовались дополнительные источники питания (например, тяговые генераторы). Тормозной момент в электродвигателях создавался исключительно за счёт индуцированной в них противо-ЭДС. Суммарная номинальная мощность использованных электродвигателей составила 4 кВт, что в 2.375 раз меньше, чем номинальная мощность используемого двигателя внутреннего сгорания.
Таким образом, результаты проведённых с использованием макета экспериментов продемонстрировали достижение заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гусеничная машина | 2019 |
|
RU2711105C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| Гусеничная машина | 2019 |
|
RU2710511C1 |
| Быстроходный двухосный колёсный вездеход на шинах сверхнизкого давления с комбинированной системой управления | 2017 |
|
RU2652936C1 |
| САМОДВИЖУЩАЯСЯ ПЛАТФОРМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2015 |
|
RU2583254C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ВЕДУЩИХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА С РАСШИРЕННЫМИ ФУНКЦИОНАЛЬНЫМИ ВОЗМОЖНОСТЯМИ | 2014 |
|
RU2558405C1 |
| Трансмиссия гусеничной машины | 1984 |
|
SU1162628A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| УСТАНОВКА С КОМБИНИРОВАННЫМ ПРИВОДОМ И ДИФФЕРЕНЦИАЛЬНЫМ СОЕДИНЕНИЕМ (ВАРИАНТЫ) | 1994 |
|
RU2126507C1 |
Изобретение относится к мобильной робототехнике. В электромеханической трансмиссии автономного мобильного робота с двигателем внутреннего сгорания крутящий момент двигателя передаётся на вход автоматической коробки передач, а выход коробки передач соединён с дифференциалом. Каждый выходной вал дифференциала механически соединён с гусеницей или ведущим колесом робота и с электродвигателем, используемым для электродинамического торможения соединённых с ним гусеницы или ведущего колеса. Суммарная номинальная механическая мощность электродвигателей как минимум в два раза меньше номинальной мощности двигателя внутреннего сгорания. Для непосредственного создания тормозящего момента на валах электродвигателей не используется энергия дополнительного источника питания. Улучшается управляемость и снижается износ тормозной системы. 1 з.п. ф-лы, 1 ил.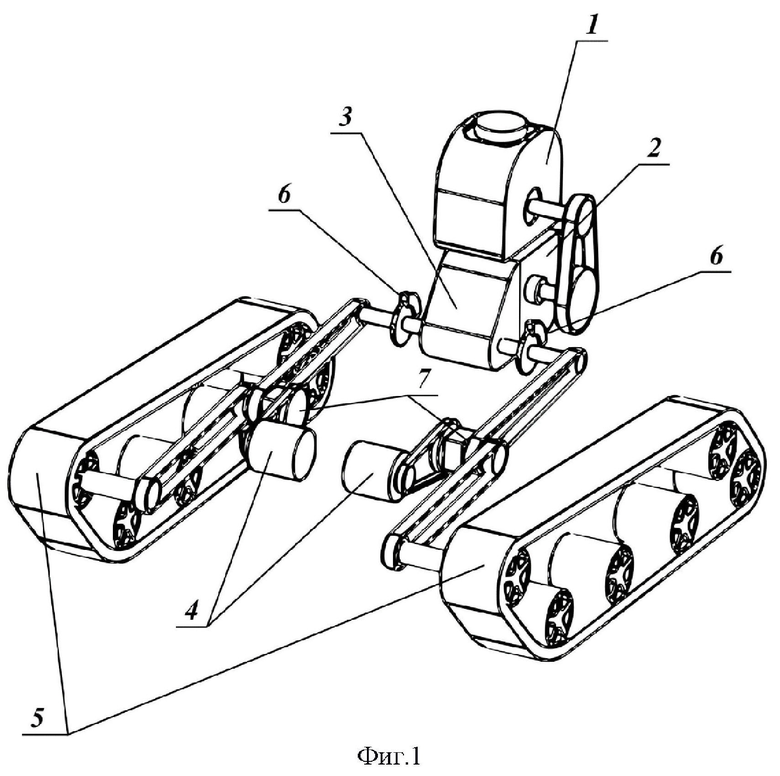
1. Электромеханическая трансмиссия автономного мобильного робота с двигателем внутреннего сгорания, характеризующаяся тем, что крутящий момент двигателя внутреннего сгорания передаётся на вход автоматической коробки передач, а выход автоматической коробки передач соединён с дифференциалом, каждый выходной вал которого механически соединён с гусеницей или ведущим колесом автономного мобильного робота и с электродвигателем, используемым для электродинамического торможения соединённых с ним гусеницы или ведущего колеса, причём суммарная номинальная механическая мощность электродвигателей как минимум в два раза меньше номинальной мощности двигателя внутреннего сгорания, при этом для непосредственного создания тормозящего момента на валах электродвигателей не используется энергия какого-либо дополнительного источника питания.
2. Электромеханическая трансмиссия автономного мобильного робота по п.1, характеризующаяся тем, что каждый выходной вал дифференциала выполнен с возможностью дополнительного соединения с одним или несколькими фрикционным тормозами, которые используются для экстренного торможения и/или аварийного маневрирования автономного мобильного робота в случае отказа одного или нескольких электродвигателей, используемых для электродинамического торможения.
| Агрегат для изготовления изделий из проволоки | 1961 |
|
SU147999A1 |
| НАДЕЖНЫЙ ЭЛЕКТРИЧЕСКИЙ ТОРМОЗ ДЛЯ СИНХРОННОГО ДВИГАТЕЛЯ | 2015 |
|
RU2666049C1 |
| РЕГУЛЯТОР ЭЛЕКТРОДИНАМИЧЕСКОГО ТОРМОЗА ЛОКОМОТИВА | 2012 |
|
RU2510342C2 |
| US 9481414 B1, 01.11.2016. | |||

