Изобретение относится к транспортному машиностроению, а именно к гусеничным транспортным средствам с гусеничным обводом, имеющим два ведущих колеса (заднее и переднее), и может использоваться для создания, в частности, безэкипажных наземных машин.
Появление потребности в создании дешевых гусеничных машин легкой категории по массе определило предложения по использованию в составе трансмиссий таких машин узлов и агрегатов серийных автомобилей. Предлагаемые решения привлекают простотой (см., например научную статью [1. Гмыря Н.Г. Создание гусеничных транспортеров особо легкой категории по массе на базе узлов и агрегатов автомобилей / Н.Г. Гмыря, В.М. Шарипов, Ю.С. Щетинин и др. // Известия МГТУ «МАМИ». – 2013. – № 2(16), т.1. – С. 23-33] и патенты-аналоги далее по тексту).
В то же время, известны устройства (конструкции), позволяющие получить существенное эксплуатационное преимущество – плавное изменение радиуса поворота машины и возможность разворота вокруг центра тяжести. Такие преимущества можно получить с помощью трансмиссии гибридной силовой установки (примеры схемных решений опубликованы в статьях [2. Концепция и основные положения рационального выбора и обоснования параметров гибридной силовой установки для унифицированного базового шасси нового поколения / Гусев М.Н., Зайцев В.А., Куртц Д.В. // Актуальные проблемы защиты и безопасности. Бронетанковая техника и вооружение. Труды тринадцатой Всероссийской научно-практической конференции. Том 3. – М.: Издание Российской академии ракетных и артиллерийских наук. , 2010.– С. 28-32 ; 3. Выбор схемного варианта построения трансмиссий военных машин с гибридной силовой установкой / Р.Ю. Добрецов и др. // Сборник статей научно-практической конференции «Разработка и использование электрических трансмиссий для образцов вооружения и военной техники (ОАО «ВНИИТрансмаш»), 20 октября 2016 г.». – СПб.: Издание ОАО «ВНИИТрансмаш», 2016. –С. 87-100; 4. Механизм передачи и поворота для гусеничной машины с двумя двигателями / Н.Н. Демидов и др. // Актуальные проблемы защиты и безопасности: Труды XXI Всероссийской научно-практической конференции РАРАН (3-6 апреля 2018 г.). М.: Издание ФГБУ «Российской академии ракетных и артиллерийских наук». М. – 2018. Том 3. «Бронетанковое вооружение и техника», 232 с. – С. 61-69 ; 5. Performance improvement of Arctic tracked vehicles. Roman Dobretsov*, Gennadii Porshnev and Darya Uvakina. MATEC Web Conf. Volume 245, 2018. International Scientific Conference on Energy, Environmental and Construction Engineering (EECE-2018). DOI: https://doi.org/10.1051/ matecconf/201824517001]).
Однако речь идет о необходимости изготовления оригинальных конструкций и применении дорогостоящих технологий, так же, как и в случае экспериментальной трансмиссии с гидростатической передачей в параллельном потоке мощности [6. Шеломов В.Б. Теория движения многоцелевых гусеничных и колесных машин. Тяговый расчет криволинейного движения: учебное пособие для вузов по специальности «Автомобиле- и тракторостроение» / В.Б. Шеломов. – СПб.: Изд-во Политехн. ун-та, 2013. – 90 с.].
Близким аналогом заявляемого изобретения, то есть совпадающим с ним по назначению и по ряду общих существенных конструктивных признаков, является гусеничное транспортное средство, содержащее гусеничный движитель с передними и задними ведущими колесами и гусеничными обводами, ДВС в качестве силовой установки машины, с механическим приводом на задние ведущие колеса через центральную коробку передач, заднюю редукторную часть и задние управляемые бортовые фрикционы, с образованием задней ветви трансмиссии и, в параллель, с механическим приводом на передние ведущие колеса через переднюю редукторную часть, с образованием передней ветви трансмиссии, при этом в трансмиссии предусмотрено также устройство для торможения [7. RU 2233763 C1, МПК (2000.01) B62D 55/00, 10.08.2004, Бюл. № 22].
В близком аналоге предусмотрена раздаточная коробка, вход которой соединен с валом ДВС, задний выход соединен, через дополнительную управляемую муфту сцепления, с упомянутой задней редукторной частью, выполненной в виде конической передачи, а передний выход соединен, посредством карданного вала, с упомянутой передней редукторной частью, выполненной в виде дифференциального механизма (переднего дифференциала). Тормозное устройство конкретно не пояснено, реверсирование движения машины осуществляется, надо полагать, включением реверс-муфты или передачи(ач) заднего хода в центральной коробке передач (сведения отсутствуют).
Общей чертой схем, описанных в работах [1, 7] является принцип использования для осуществления прямолинейного движения ведущих колес, расположенных в корме машины, и создания поворачивающего момента за счет подвода мощности к ведущим колесам, расположенным в носовой части машины.
Само по себе наличие зубьев на направляющем колесе затрудняет сброс гусеницы в повороте. В ходовой части немецкого штурмового орудия «Ferdinand» и тяжелых танков «Тигр» и «Королевский тигр» (Panzerkampfwagen VI Ausf.B (Sd.Kfz.182), позже замененное на Panzerkampfwagen – Tiger Ausf.B или Tiger II) было применено направляющее колесо с зубьями, снабженное гидропневматическим тормозом [8. «Элефант». Тяжелое штурмовое орудие Фердинанда Порше / Коломиец М. В. Устройство «Фердинанда». URL: https://tech.wikireading.ru/9392/. Гл. «Ходовая часть», абз.3 ; 9. Буров С.С. Конструкция и расчет танков. – М.: Изд-во Академии бронетанковых войск им. маршала Р.Я. Малиновского. – С. 371-420, рис. 168 (упрощенная обобщенная схема), рис. 170 (частный вариант с ФЗМ – Argus Lenkapparat L St0.2, исторически первый механизм данного типа, применённый на шасси танка «Тигр» Sd.Kfz.181), рис. 171 (варианты с гидрообъемными МП]. Решение, по-видимому было вызвано компоновочными соображениями. Для современной машины с податливыми гусеницами с РМШ оно позволило бы сократить длину ветви, нагружаемой при торможении и снизить вероятность проскока гусеницы на зубьях ведущего колеса.
Для управления поворотом на перечисленных гусеничных машинах направляющее колесо не использовалось.
Вернемся к аналогу [7]. Для описываемой в нем схемы прямолинейное движение будет устойчивым, что является положительным свойством.
Симметричный дифференциал обеспечивает равенство моментов (а следовательно, при выбранной схеме трансмиссии, и сил) на ведущих колесах по модулю и направлению. Возникает следующая ситуация.
Рекуперация мощности в повороте возможна при отрицательной силе тяги на отстающем борту и ненулевой скорости этого борта. Поток мощности от забегающего борта проходит через грунт на отстающий борт. Далее мощность передается через переднее ведущее колесо, коробку дифференциала, переднюю редукторную часть (главную коническую передачу), карданную передачу, раздаточную коробку и заднюю редукторную часть – на заднее ведущее колесо забегающего борта. Итак, имеет место рекуперация, которая снижает нагрузку на двигатель и рассматривается, как полезное явление. На переднем ведущем колесе забегающего борта также создается тормозная сила. Поток мощности от него идет к коробке дифференциала и далее следует к заднему ведущему колесу отстающего борта по тому же пути, что и поток рекуперации.
Такая циркуляция мощности загружает трансмиссию и полезной не является.
Наличие механической связи в виде карданной(ых) передачи(ач) (в статье [1] приведена аналогичная схема с передним и задним карданами) уменьшает полезные объемы, усложняет конструкцию и увеличивает массу шасси. Таким образом, трансмиссия в принципе целесообразна к применению именно на легких машинах, но нуждается в усовершенствовании.
Наиболее близким аналогом (прототипом) заявляемого изобретения, то есть совпадающим с ним по назначению и по общим существенным конструктивным признакам, является гусеничная машина, содержащая гусеничный движитель с передними и задними ведущими колесами и гусеничными обводами, тепловой двигатель в составе гибридной силовой установки параллельного типа, с механическим приводом на задние ведущие колеса через заднюю редукторную часть и задние управляемые бортовые фрикционы, с образованием задней ветви трансмиссии, передний дополнительный источник крутящего момента, например электромотор, в составе силовой установки машины, с механическим приводом на передние ведущие колеса через переднюю редукторную часть и передние управляемые бортовые фрикционы, с образованием передней ветви трансмиссии, при этом в трансмиссии предусмотрены также реверсирующее устройство (реверс-редуктор) и два бортовых тормоза в одной из ее ветвей [10. RU 2648527 C1, МПК (2006.01) B62D 11/00, B60K 17/354, 26.03.2018, Бюл. № 9].
В прототипе [10], ближайшим аналогом которого явился упомянутый выше аналог [7], силовая установка, как подчеркнуто выше, выполнена (по частному примеру) гибридной параллельного типа (тепловой двигатель – ДВС с приводом на задние ведущие колеса + дополнительный источник крутящего момента – электромотор с приводом на передние ведущие колеса), а трансмиссия – дифференциальной, при этом в задней ветви трансмиссии между валом теплового двигателя (ДВС) и задними управляемыми бортовыми фрикционами установлен задний дифференциальный механизм (задний дифференциал), в передней ветви трансмиссии между валом дополнительного источника крутящего момента (электромотором) и передними управляемыми бортовыми фрикционами установлен передний дифференциальный механизм (передний дифференциал, аналогичный заднему).
В прототипе [10] прямолинейное движение может обеспечиваться с помощью теплового двигателя (ДВС) и дополнительного источника крутящего момента (электрического двигателя), если в реверс-редукторе реализуется прямая передача и его функции не ограничиваются реверсированием сопрягаемых валов).
Тормоза установлены в задней ветви трансмиссии (перед задними ведущими колесами).
В штатном режиме поворот осуществляется за счет работы привода передних ведущих колес (16, 17 в обозначениях [10]): скорость забегающего борта увеличивается, отстающего (благодаря работе переднего дифференциала в паре с реверс-редуктором) – уменьшается. Возможно снижение радиуса поворота вплоть до нуля.
В случае отказа электродвигателя управление поворотом осуществляется с помощью тормозов. Муфты 6-9 позволяют отключать приводы 3, 4 от трансмиссии в нештатных ситуациях.
Наличие свободных дифференциалов в составе ветвей трансмиссии, связанных с ведущими и активными направляющими колесами в принципе исключает возможность рекуперации мощности (как полезного явления). Следовательно, трансмиссия-прототип может быть использована на легких гусеничных машинах лишь тогда, когда экономичность шасси в большей степени определяется не отсутствием рекуперации, а другими факторами.
Таким образом, известная гусеничная машина (прототип) [10] имеет недостаточно высокие тактико-технические (в оговоренных условиях, в приложении к военным и специальным транспортным машинам) или технико-эксплуатационные (в приложении к гражданским транспортным машинам) характеристики.
Задача, на решение которой направлено заявляемое изобретение, заключается в устранении указанных недостатков прототипа и, соответственно, в улучшении технико-эксплуатационных или тактико-технических характеристик гусеничных машин, в гусеничном обводе которых используются два ведущих колеса.
Решение поставленной задачи достигается тем, что в гусеничной машине, содержащей гусеничный движитель с передними и задними ведущими колесами и гусеничными обводами, тепловой двигатель в составе гибридной силовой установки параллельного типа, с механическим приводом на задние ведущие колеса через заднюю редукторную часть и задние управляемые бортовые фрикционы, с образованием задней ветви трансмиссии, передний дополнительный источник крутящего момента, например электромотор, в составе силовой установки машины, с механическим приводом на передние ведущие колеса через переднюю редукторную часть и передние управляемые бортовые фрикционы, с образованием передней ветви трансмиссии, при этом в трансмиссии предусмотрены также два бортовых тормоза в одной из ее ветвей, согласно заявляемому изобретению, трансмиссия выполнена бездифференциальной, при этом задняя ветвь трансмиссии содержит последовательно соединенные центральную коробку передач, заднюю промежуточную передачу, и упомянутые задние управляемые бортовые фрикционы, передняя ее ветвь содержит последовательно соединенные понижающий скорость вращения редуктор, переднюю промежуточную передачу и упомянутые передние управляемые бортовые фрикционы, а параллельно тепловому двигателю, к входу центральной коробки передач дополнительно подключен задний дополнительный источник крутящего момента, например электромотор с редукторной частью, в составе гибридной силовой установки.
Решение поставленной задачи достигается также за счёт дополнительных конструктивных признаков (при сформулированной выше основной совокупности признаков гусеничной машины):
- передний и задний дополнительные источники крутящего момента могут быть выполнены в виде обратимых электрических машин, связанных с общим для них накопителем электрической энергии (это расширяет энергетические возможности машины: обеспечивается возможность эффективной рекуперации энергии – подзарядка источника электрического тока, – накопителя, – в соответствующих режимах движения машины);
- бортовые тормоза могут быть установлены в передней ветви трансмиссии (это может считаться целесообразным, с учетом положительного опыта конструкторов САУ «Фердинанд» [8, 9]; так как позволяет снизить вероятность проскока гусеницы на зубьях ведущего колеса при торможении (актуально для тяжелых машин) и уменьшить длину ветви, растягиваемой тормозным усилием, что актуально для гусениц с резино-металлическим шарниром – РМШ).
Среди известных гусеничных машин, а также их трансмиссий (приводов), а также устройств и способов поворота не обнаружены такие, совокупность существенных признаков которых совпадала бы с заявленной. В то же время, именно за счёт последней достигается новый технический результат в соответствии с поставленной задачей.
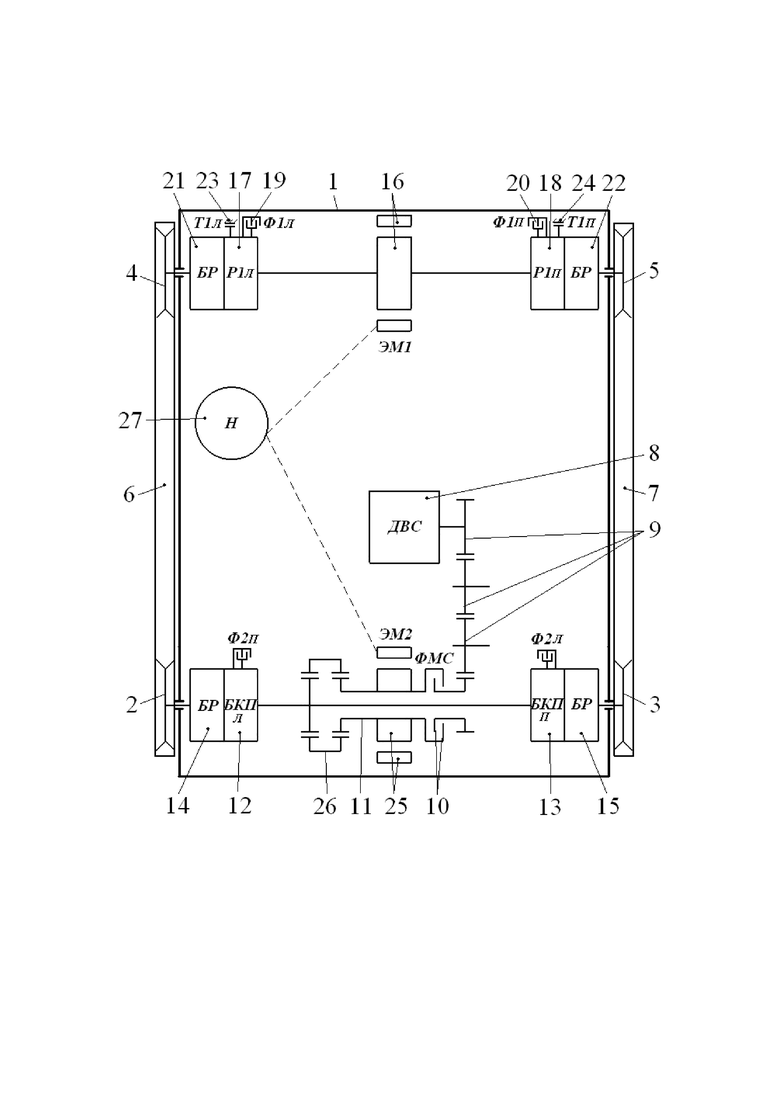
Заявляемое устройство гусеничной машины в составе механизма передач и поворота, двух или трех двигателей и четырех ведущих колëс (на примере силовой установки с ДВС и двумя обратимыми электрическими машинами) проиллюстрировано фигурой.
Заявляемая гусеничная машина содержит несущий корпус или раму 1, гусеничный движитель с задними 2 (левое), 3 (правое) и передними 4 (левое), 5 (правое) ведущими колесами и гусеничными обводами (гусеницами) 6 (левый), 7 (правый) и тепловой двигатель 8 (как правило, двигатель внутреннего сгорания – ДВС) в составе комбинированной силовой установки параллельного типа.
Двигатель 8 имеет механический привод на задние ведущие колеса 2, 3 через заднюю редукторную часть 9 в составе центральной коробки передач (ЦКП) 10 с редуктором типа «гитара» 11 (как варианты, это могут быть цепная, клиноременная или иная передача), задние управляемые бортовые фрикционы – левый (Ф2л) 12 и правый (Ф2п) 13, и, как правило, задние бортовые редукторы (БР) 14 (левый) и 15 (правый), с образованием задней ветви (на фигуре – внизу) трансмиссии (механизма передачи и поворота).
В то же время, машина имеет передний дополнительный источник крутящего момента, например электромотор (ЭМ1), 16, также в составе силовой установки машины, с механическим приводом на передние ведущие колеса 4, 5 через переднюю редукторную часть (Р1) 17 с редуктором типа «гитара» 18 (как варианты, это тоже могут быть цепная, клиноременная или иная передача), передние управляемые бортовые фрикционы – левый (Ф1л) 19 и правый (Ф1п) 20, и, как правило, передние бортовые редукторы (БР) 21 (левый) и 22 (правый), с образованием передней ветви (на фигуре – вверху) трансмиссии.
В состав трансмиссии входят также: два бортовых тормоза – (Т1л) 23 и (Т1п) 24 в одной из ее ветвей, преимущественно в передней (см. фигуру).
Согласно заявляемому изобретению трансмиссия выполнена бездифференциальной. При этом задняя ветвь трансмиссии содержит последовательно соединенные ЦКП 10, заднюю промежуточную передачу (редуктор «гитара») 11, и фрикционы, 12 (Ф2л) и 13 (Ф2п), а также БР 14, 15 (при их наличии).
Передняя ее ветвь содержит последовательно соединенные понижающий (скорость вращения) редуктор 17 (Р1), переднюю промежуточную передачу 18 и фрикционы 19 (Ф1л) и 20 (Ф1п), а также БР 21, 22 (при их наличии).
Параллельно двигателю 8, к входу ЦКП дополнительно подключен задний дополнительный источник крутящего момента, например электромотор ЭМ2 25 с редукторной частью 26, также структурно входящие в состав упомянутой гибридной силовой установки.
Дальнейшее описание распространяется на частные примеры выполнения заявляемого устройства, которые не обязательны, но рекомендуются как рациональные, усиливающие технический результат использования (эффективность).
По одному из них, передний и задний дополнительные источники крутящего момента – соответственно 16 и 25, выполнены в виде обратимых электрических машин, связанных с общим для них накопителем Н 27 электрической энергии (электрическим аккумулятором).
По другому из них, бортовые тормоза 23 (Т1л) и 24 (Т1п) установлены в передней ветви трансмиссии.
Возможны другие кинематические схемы и конструкции в рамках заявляемых основной и дополнительных совокупностей существенных признаков.
Устройство работает следующим образом.
Могут быть реализованы следующие режимы работы трансмиссии (см. табл.).
Режимы работы трансмиссии
управления
двигатели
Прямолинейное движение, частичные нагрузки (варианты функционирования):
- двигатель 16 (ЭМ1) остановлен, фрикционы 19 и 20 (Ф1л(п)) отключены, машина движется за счет двигателя 8 (ДВС);
- двигатель 8 (ДВС) остановлен, фрикционы 12 и 13 (Ф2л(п)) отключены, машина движется за счет двигателя 16 (ЭМ1) (реализуются преимущества движения на электротяге – см. авторскую статью [11. Выбор схемного варианта построения трансмиссий военных машин с гибридной силовой установкой / Р.Ю. Добрецов и др. // Сборник статей научно-практической конференции «Разработка и использование электрических трансмиссий для образцов вооружения и военной техники (ОАО «ВНИИТрансмаш»), 20 октября 2016 г.». – СПб.: Издание ОАО «ВНИИТрансмаш», 2016. – С. 87-100]).
Поворот, штатный режим – вне зависимости от значения радиуса поворота ветви трансмиссии подключают к гусеничным обводам (гусеницам) 6, 7 «по диагонали» (это ключевой момент в предмете изобретения, всвязи с чем такое авторское предложение можно назвать «диагональным способом поворота», никогда ранее не применявшимся): на забегающем борту включен фрикцион, связанный с задним ведущим колесом, на отстающем – связанный с передним ведущим колесом; направление, величина, плавность изменения силы тяги на отстающем борту определяются режимом работы переднего электрического двигателя (электрической машины или, в общем случае – дополнительного источника крутящего момента) 16 (ЭМ1), то есть изменение (регулировка) радиуса поворота машины происходит бесступенчато. Поскольку при повороте скорость прямолинейного движения сохраняет забегающий борт машины, значение кинематического параметра механизма поворота составляет qM= 0,5. Механизм поворота можно классифицировать, как бортовой (независимого типа). Однако при повороте на месте (скорости бортов равны по величине и противоположно направлены) qM= 0.
При соблюдении условий для возникновения рекуперации (сила тяги на отстающем борту отрицательна, скорость отстающего борта ненулевая) мощность с гусеницы забегающего борта передается через грунт на гусеницу отстающего борта. Если при этом обратимая электрическая машина 16 (ЭМ1), связанная с приводом передних ведущих колес 4, 5, работает в генераторном режиме, то создается электрическая энергия, направляемая через накопитель 27 на обратимую электрическую машину 25 (ЭМ2), установленную параллельно тепловому двигателю 8 (ДВС). То есть мощностной поток при рекуперации замыкается через электромеханическую связь.
При повороте машины с малым радиусом на отстающем борту, при необходимости можно использовать остановочный тормоз 23 (Т1л) или 24 (Т1п), при этом фрикцион, связанный с передним ведущим (активным направляющим) колесом 5 или 4 отстающего борта, должен быть отключен, рекуперация мощности невозможна.
Прямолинейное движение, форсированный режим – тепловой 8 (ДВС) и электрический 16 (ЭМ1) двигатели включены, мощностные потоки суммируются на гусеницах 2, 3. Дополнительно электрическая машина 25 (ЭМ2), связанная с валом двигателя 8 (ДВС), может также быть запущена в режиме электродвигателя.
Поворот, форсированный режим – сила тяги на отстающем борту снижается за счет пробуксовки фрикционов в используемых ветвях трансмиссии, связанных с отстающим бортом (при отсутствии контроля буксования пакетов дисков фрикционов качество управления поворотом снизится). Как и в предыдущем случае, обратимая электрическая машина 25 (ЭМ2) может быть запущена в режиме двигателя.
Поворот, аварийный режим – при отказе электродвигателя 16 (ЭМ1) поворот машины с радиусом менее свободного возможен за счет затягивания остановочного тормоза Т1 отстающего борта; минимальный относительный радиус поворота при этом составит ρ=0,5.
При создании ходового макета на базе существующей гусеничной машины нецелесообразно уменьшать мощность теплового двигателя 8 (ДВС). Гибридная силовая установка в этом случае позволит увеличить мощность на гусеницах 6, 7 в форсированном режиме, что актуально для боевых машин. При проектировании макета гусеничной машины суммарную мощность силовой установки следует определять при тяговом расчете из условия обеспечения максимальной скорости движения (например, по методике, описанной в книге [12. Забавников Н.А. Основы теории транспортных гусеничных машин. – М.: Машиностроение, 1975. – 448 с.]).
Мощность электромашины 16 (ЭМ1) в приводе передних ведущих колес 4, 5 определяется условиями движения (момент сопротивления повороту, угловая скорость поворота) и особенностями кинематической схемы и конструкции трансмиссии.
При равномерном повороте на горизонтальной поверхности (прочие допущения приведены в работе [6]) момент сопротивления повороту определяется известным выражением [6,12] M=μGL/4 , в котором G – вес машины, L – длина опорной поверхности); а коэффициент сопротивления повороту традиционно описывается эмпирической зависимостью, полученной на основании опытов А.О. Никитина [6]:
μ(ρ)=μmax/(0,925+0,15ρ).
Однако значение коэффициента максимального сопротивления повороту μmax в опытах А.О. Никитина определялось опытным путем при повороте машины вокруг остановленной гусеницы [6, 12], [13. Расчет и конструирование гусеничных машин: Учебник для вузов / Н.А. Носов, В.Д. Галышев, Ю.П. Волков и др.; Под ред. Н.А. Носова. — Л.: Машиностроение, 1972. – 559 с.]: μmax = μ(0,5). Поэтому при ρ<0,5 требуется либо экстраполировать зависимость μ(ρ), либо внести поправки в формулу для определения μ (например, [6]).
Момент сопротивления повороту для схемы-прототипа [10], а также в двухпоточных трансмиссиях, описанных в работах [3-5], преодолевается электродвигателем передней ветви трансмиссии, мощность которого может быть оценена по зависимости
NЭМ = Mω / ηЗП.
Здесь ω=(V2 – V1)/B – угловая скорость поворота (V2 и V1 – линейные скорости забегающего и отстающего бортов, B – ширина колеи); ηЗП –КПД зубчатых передач.
Момент сопротивления повороту преодолевается силами тяги P2 и P1 (на фигуре не показаны), создаваемыми на гусеницах 2, 3, и может быть выражен, как M=(P2 – P1)B/2 [6]. Однако, для трансмиссии, выполненной по заявляемой схеме (см. фигуру), сила тяги на забегающем борту создается тепловым двигателем 8 (ДВС), а тормозная сила на отстающем борту – с помощью электродвигателя 16 (ЭМ1). В схеме с передним дифференциалом в приводе передних ведущих колес (см. [10].) электродвигателем 16 (ЭМ1) вынуждены создавать силы P2 и P1. Следовательно, при прочих равных условиях, момент, нагружающий двигатель 16 (ЭМ1) в повороте, для схемы по фигуре в заявляемом изобретении, в два раза меньше, чем для схем с дифференциалом в приводе передних ведущих колес прототипа [10].
Для малогабаритной машины массой 2 т при длине опорной поверхности 3 м в тех же условиях для поворота будет достаточно мощности электродвигателя 16 (ЭМ1) не более 7…8 кВт. При этом радиус поворота будет изменяться плавно, так как процесс контролируется путем изменения частоты вращения вала двигателя 16 (ЭМ1).
Таким образом, можно резюмировать:
1. Недостатком известных схем трансмиссий легких гусеничных машин, созданных на основе агрегатов автомобилей, является наличие циркуляции мощности в повороте, что ведет к увеличению расхода топлива и в принципе снижает долговечность.
2. Предложены кинематические схемы, лишенные такого недостатка. Переднее расположение тормозов позволяет снизить вероятность проскока гусеницы на зубьях ведущего колеса при торможении (актуально для тяжелых машин) и уменьшить длину ветви, растягиваемой тормозным усилием (актуально для гусениц с РМШ).
3. Заявляемое устройство (схемное решение) позволит, при сохранении тех же тягово-динамических характеристик в повороте, в два раза (по сравнению с прототипом [10]) снизить мощность электрического двигателя, связанного с передними ведущими колесами.
4. Особенностью предложенного устройства (схемы) является возможность плавного изменения радиуса поворота машины и обеспечение возможности ее разворота вокруг центра тяжести (то есть с нулевым радиусом).
Технический результат от использования заявляемого изобретения заключается в устранении указанных недостатков прототипа и, соответственно, в улучшении технико-эксплуатационных или тактико-технических характеристик, в приложении к транспортным гусеничным машинам, за счет роста подвижности, устойчивости прямолинейного движения, топливной экономичности, расширения спектра эксплуатационных режимов и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гусеничная машина | 2019 |
|
RU2711105C1 |
| Четырехгусеничное шасси | 2022 |
|
RU2798151C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2005 |
|
RU2297926C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2006 |
|
RU2299146C1 |
| ГИДРООБЪЕМНАЯ ТРАНСМИССИЯ ГУСЕНИЧНОГО ТРАКТОРА | 2003 |
|
RU2247037C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С БОРТОВЫМИ КОРОБКАМИ ПЕРЕДАЧ | 2009 |
|
RU2412847C1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С ЦЕНТРАЛЬНОЙ СОСТАВНОЙ КОРОБКОЙ ПЕРЕДАЧ | 2010 |
|
RU2438908C1 |
| Трансмиссия самоходной гусеничной машины | 1984 |
|
SU1273291A1 |
| Трансмиссия гусеничной машины | 1977 |
|
SU727505A1 |
| Электромеханический двухпоточный привод транспортной машины с бортовым способом поворота | 2018 |
|
RU2726881C2 |
Изобретение относится к гибридным гусеничным транспортным средствам. Гусеничная машина содержит гусеничный движитель с задними (2, 3) и передними (4, 5) ведущими колесами, тепловой двигатель (8) в составе гибридной силовой установки параллельного типа с механическим приводом (9-11) на задние ведущие колеса (2, 3), передний дополнительный источник крутящего момента, например электромотор (16). Трансмиссия выполнена бездифференциальной. Задняя ветвь трансмиссии содержит последовательно соединенные центральную коробку передач (10), заднюю промежуточную передачу (11), задние управляемые бортовые фрикционы (12, 13) и задние бортовые редукторы (14, 15). Передняя ветвь содержит последовательно соединенные понижающий редуктор (17), переднюю промежуточную передачу (18), передние управляемые бортовые фрикционы (19, 20) и бортовые редукторы (21, 22). Параллельно тепловому двигателю (8) к входу центральной коробки передач (10) дополнительно подключен задний дополнительный источник крутящего момента, например электромотор (25) с редукторной частью (26). Достигается улучшение технико-эксплуатационных или тактико-технических характеристик гусеничных машин. 2 з.п. ф-лы, 1 ил., 1 табл.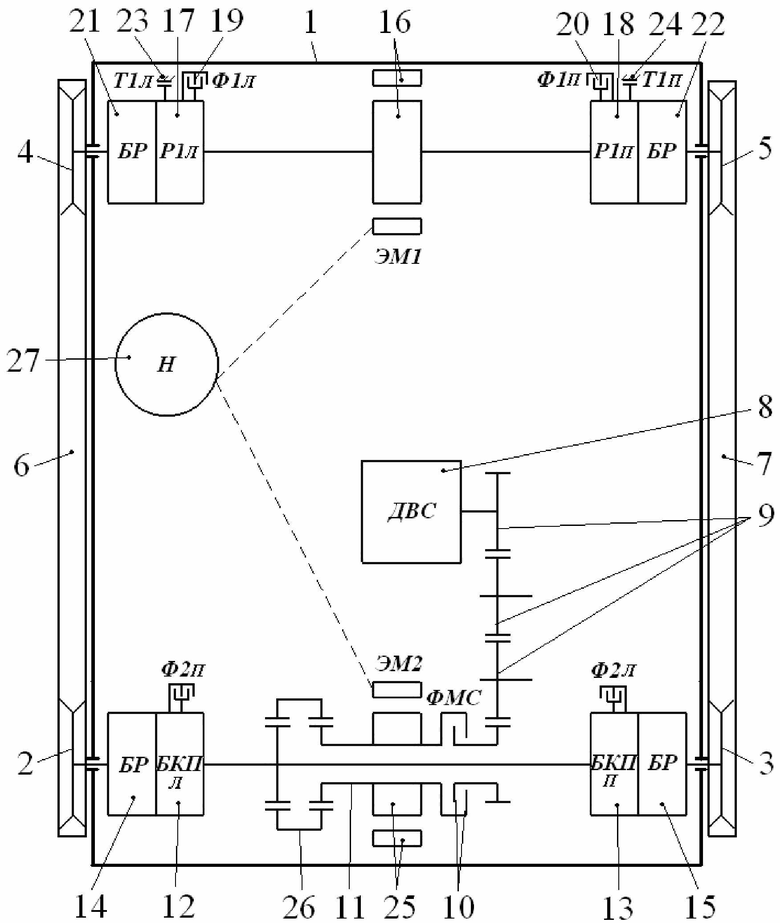
1. Гусеничная машина, содержащая гусеничный движитель с передними и задними ведущими колесами и гусеничными обводами, тепловой двигатель в составе силовой установки машины с механическим приводом на задние ведущие колеса через заднюю редукторную часть, и задние управляемые бортовые фрикционы с образованием задней ветви трансмиссии, передний дополнительный источник крутящего момента, например электромотор, в составе силовой установки машины с механическим приводом на передние ведущие колеса через переднюю редукторную часть, и передние управляемые бортовые фрикционы с образованием передней ветви трансмиссии, при этом в трансмиссии предусмотрены также два бортовых тормоза в одной из ее ветвей, отличающаяся тем, что силовая установка выполнена гибридной параллельного типа, а трансмиссия – бездифференциальной, при этом задняя ветвь трансмиссии содержит последовательно соединенные центральную коробку передач, заднюю промежуточную передачу и упомянутые задние управляемые бортовые фрикционы, передняя ее ветвь содержит последовательно соединенные понижающий скорость вращения редуктор, переднюю промежуточную передачу и упомянутые передние управляемые бортовые фрикционы, а параллельно тепловому двигателю к входу центральной коробки передач дополнительно подключен задний дополнительный источник крутящего момента, например электромотор с редукторной частью, в составе гибридной силовой установки.
2. Гусеничная машина по п. 1, отличающаяся тем, что в ней передний и задний дополнительные источники крутящего момента выполнены в виде обратимых электрических машин, связанных с общим для них накопителем электрической энергии.
3. Гусеничная машина по п. 1, отличающаяся тем, что в ней бортовые тормоза установлены в передней ветви трансмиссии.
| УНИВЕРСАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАСМИССИЯ | 2016 |
|
RU2648527C1 |
| ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2003 |
|
RU2233763C1 |
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
| САМОДВИЖУЩАЯСЯ ПЛАТФОРМА РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2015 |
|
RU2583254C1 |
| Упругое экипажное колесо | 1925 |
|
SU7823A1 |

