Настоящий способ относится к области обработки и отображения пространственной информации и может быть использован для построения картографических моделей местности на основе трехмерных цифровых моделей местности.
Известен способ автоматического построения трехмерных моделей городов (патент RU 2638638 С1), содержащий этапы, на которых получают набор первичных данных, содержащих городские объекты, причем данные представляют собой, по меньшей мере, данные облака точек, полученные в ходе лазерного сканирования, и геопривязанных фотографических данных, выполняют сведение обособленных облаков точек лазерного сканирования из набора первичных данных в единое облако точек, определяют точки в упомянутом едином облаке точек, которые характеризуют горизонтальную поверхность земли, на которой расположены городские объекты, определяют кластеры, характеризующие обособленные группы точек, связанные между собой, осуществляют очистку упомянутого единого облака точек, в ходе которой удаляют точки облака лазерного сканирования, характеризующие нестационарные объекты, объекты, охарактеризованные одной или несколькими точками, которые не связаны с точками единого облака точек, характеризующих горизонтальную поверхность земли, на которой расположены городские объекты, или кластерами, и протяженные группы точек малой плотности, осуществляется построение нормалей к каждой из точек очищенного единого облака точек, осуществляется построение плоскостей для совокупностей точек облака точек, осуществляется построение рельефа местности по построенным упомянутым нормалям и упомянутым плоскостям, выполняют последовательное распознавание статичных городских объектов на основании данных, полученных из очищенного единого облака данных лазерного сканирования и фотографических данных, для каждого обнаруженного городского объекта определяют, по меньшей мере, географические координаты и линейные размеры, осуществляют построение трехмерной модели каждого из обнаруженных упомянутых городских объектов, выполняют объединение упомянутых трехмерных моделей в единую трехмерную модель города.
Недостатком данного способа является его трудоемкость, поскольку для автоматического построения трехмерных моделей городов согласно данному способу используется набор первичных данных, включающий, по меньшей мере, как данные облака точек, полученные в ходе лазерного сканирования, так и геопривязанные фотографические данные. До построения трехмерной модели каждого из городских объектов выполняется длительная предварительная обработка облака точек лазерного сканирования - очистка упомянутого единого облака точек и распознавание статичных городских объектов на основании данных, полученных из очищенного единого облака данных лазерного сканирования и фотографических данных. На выполнение данных операций требуются значительные временные затраты, а на эффективность выполнения очистки и распознавания неминуемо оказывает влияние человеческий фактор.
Наиболее близким к предлагаемому способу является способ построения трехмерной векторной карты по цифровой модели и снимку местности раскрытый в патенте RU 2680758 С1. Согласно данному способу двумерный снимок местности подается на вход блока двумерной векторизации, в котором осуществляется выделение двумерных полигональных векторных объектов. Выделенные векторные объекты подаются на вход блока управления базами данных и на вход блока географических преобразований. Блок географических преобразований получает на один вход полигональный двумерный векторный объект, а на другой вход - ЦММ. По координатам вершин двумерного полигонального векторного объекта из ЦММ выделяется фрагмент регулярной матрицы высот, соответствующий объекту. После этого фрагмент матрицы высот и двумерный полигональный векторный объект подаются на вход блока трехмерных построений. В блоке трехмерных построений, с использованием полигонального двумерного векторного объекта и фрагмента матрицы высот, соответствующей данному объекту, строится регулярный трехмерный векторный объект в формате VRML, описывающийся как набор точек. Далее трехмерный векторный объект передается на вход блока управления базами данных. Блок управления базами данных принимает на один вход полигональные двумерные векторные объекты, а на другой вход регулярные трехмерные векторные объекты в формате VRML. Двумерные векторные объекты заносятся в базу данных двумерных электронных карт. Трехмерные векторные объекты заносятся в базу данных трехмерных объектов.
Недостатком данного способа является необходимость до построения регулярных трехмерных векторных объектов в формате VRML выполнять последовательность операций по выявлению двумерных полигональных векторных объектов и выделению из ЦММ фрагмента регулярной матрицы высот, соответствующего объекту. Построение регулярных трехмерных векторных объектов в представленном способе производится с использованием полигонального двумерного векторного объекта и фрагмента матрицы высот, соответствующего данному объекту. Данные особенности раскрытого способа предполагают высокие временные затраты на построение 3D модели объекта и необходимость обработки больших объемов данных. Кроме того, в приведенном прототипе значительную часть работы составляет ручная фильтрация исходных данных, чтобы убрать данные о деревьях, рельефе местности, проводах, а также нестатичных объектах (машинах, птицах). Большинство этих операций необходимы, если пытаться выделять стены здания, а не только крышу. Значительную их часть приходится выполнять вручную, что существенным образом влияет на увеличение времени обработки и на увеличение количества ошибок выделения требуемых объектов.
Техническая задача заявленного изобретения заключается в разработке эффективного способа создания полигональных моделей зданий и сооружений по данным лазерно-локационной съемки местности для создания качественных картографических моделей местности и составления всех видов карт и планов.
Технические результаты заявленного изобретения заключаются в снижении временных затрат и повышении точности формирования векторных и полигональных моделей зданий по исходному облаку точек, а также в снижении влияния человеческого фактора на качество получаемых моделей.
В предлагаемом способе технические результаты достигаются тем, что средствами воздушной лазерной съемки формируется облако точек всех объектов заданного участка местности, по полученному облаку точек для каждого здания вручную выбирают область, визуально соответствующую крыше здания, а затем выполняется построение трехмерных объектов. Для построения трехмерных объектов точки, попавшие в область, соответствующую крыше здания, помещаются в массив точек крыши. Затем определяются точки внешнего контура крыши, определением альфа-формы, выбором всех регулярных ребер альфа-формы и упорядочиванием их по смежным точкам, в результате чего формируется упорядоченный набор точек контура крыши. Далее по точкам внешнего контура крыши методом наименьших полных квадратов осуществляется построение отрезков границы крыши и формируется контур первого приближения, выполняется соединение отрезков контура первого приближения в замкнутый контур. Кроме того, методом выращивания регионов определяются плоскости трехмерной геометрии крыши, определяются внутренние ребра крыши, как взаимные пересечения полученного набора плоскостей трехмерной геометрии крыши, определяются ребра края крыши как пересечение полученного набора плоскостей трехмерной геометрии крыши с вертикальными плоскостями, проведенными через границу замкнутого контура. По пересечению ребер края крыши с внутренними ребрами на данной плоскости определяется грань крыши. Соседние внешние грани крыши сравниваются между собой, если точки их пересечения с внутренним ребром находятся на различном удалении от середины данного внутреннего ребра, то за положение истинного конца ребра края крыши принимается конец более удаленного от этой середины. Далее формируются вертикальные грани стен здания, соединяющие ребра края крыши с горизонтальной плоскостью, расположенной на средней высоте рельефа в области расположения здания. По найденным параметрам ребер и граней формируется векторная или полигональная модели здания.
Для построения отрезков границы крыши и формирования контура первого приближения выбираются первые две точки из упорядоченного набора точек контура крыши, по которым определяется текущая линия, в случае если еще есть краевые точки, то выбирается следующая точка упорядоченного набора точек контура крыши, и текущая линия обновляется методом наименьших полных квадратов по своему набору точек вместе с новой точкой, если максимальное отклонение всех точек линии не превышает максимального заданного отклонения, то новая точка добавляется к набору линии, и процесс попытки добавления новой точки повторяется, в противном случае новая точка отбрасывается, а в контур первого приближения добавляется новый отрезок на текущей линии, концами которого становятся проекции на текущую линию первой и последней точек набора, и текущая линия становится предыдущей, набор точек текущей линии очищается и в него добавляется точка, отброшенная на предыдущем шаге, в качестве исходного направления текущей линии выбирается перпендикуляр к предыдущей линии, и попытка добавления новых точек осуществляется для новой текущей линии.
Для соединения отрезков контура первого приближения в замкнутый контур соседние отрезки продлеваются до пересечения друг с другом, точки пересечения становятся вершинами замкнутого контура, в случае, если соседние отрезки близки к параллельным, а расстояние между ними меньше среднего расстояния между точками массива точек крыши, то такие отрезки объединяются в один, по расстоянию до отрезков точек упорядоченного набора точек контура крыши определяется принадлежность точек к отрезкам контура первого приближения, для каждого отрезка определяется число его точек, находящихся снаружи формируемого замкнутого контура, и отрезок смещается по направлению, ему перпендикулярном, так, чтобы три четверти принадлежащих ему точек контура первого приближения оказались внутри формируемого замкнутого контура, смещенные отрезки продлеваются до пересечения с соседними, слишком короткие отрезки, длина которых не больше среднего расстояния между точками, отбрасываются и заменяются на одну точку в своем центре.
Изобретение поясняется рисунками:
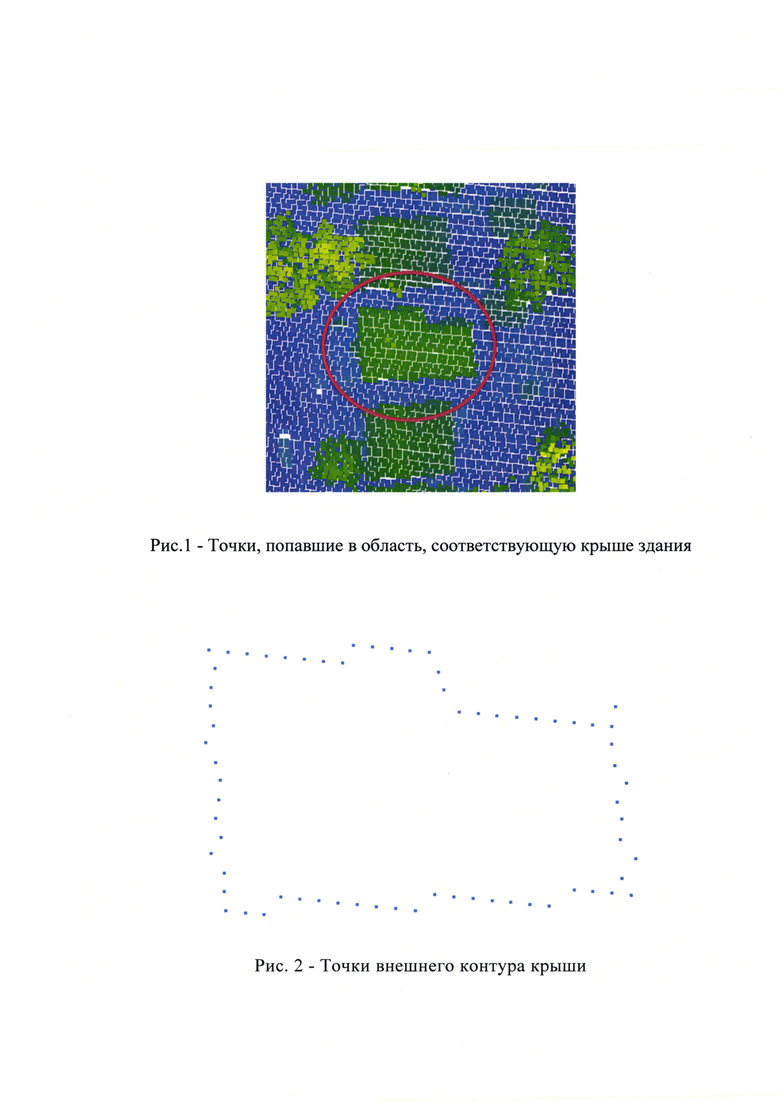
- рис. 1 - Точки, попавшие в область, соответствующую крыше здания;
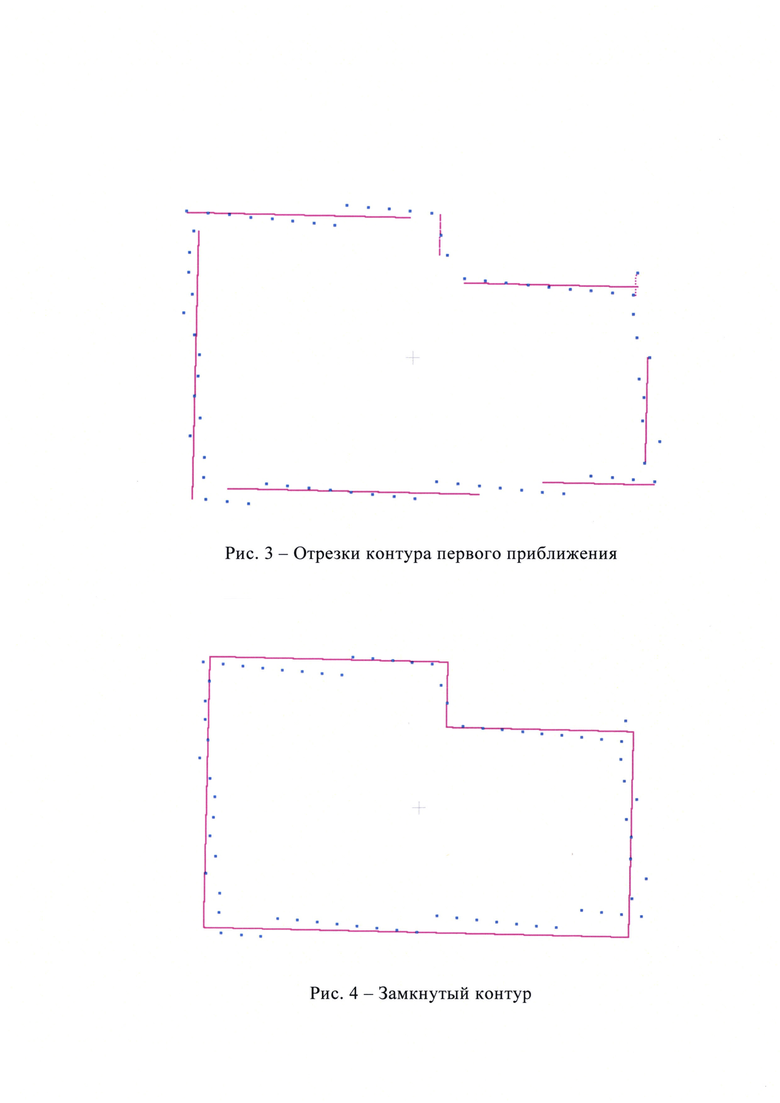
- рис. 2 - Точки внешнего контура крыши;
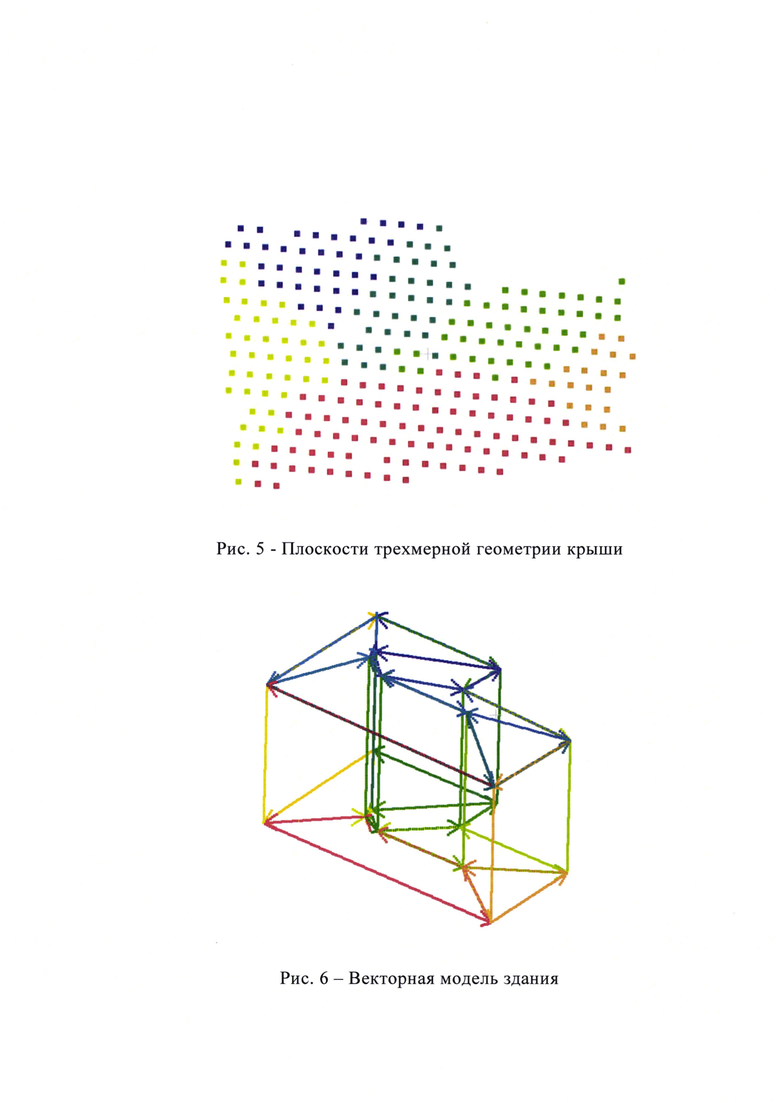
- рис. 3 - Отрезки контура первого приближения;
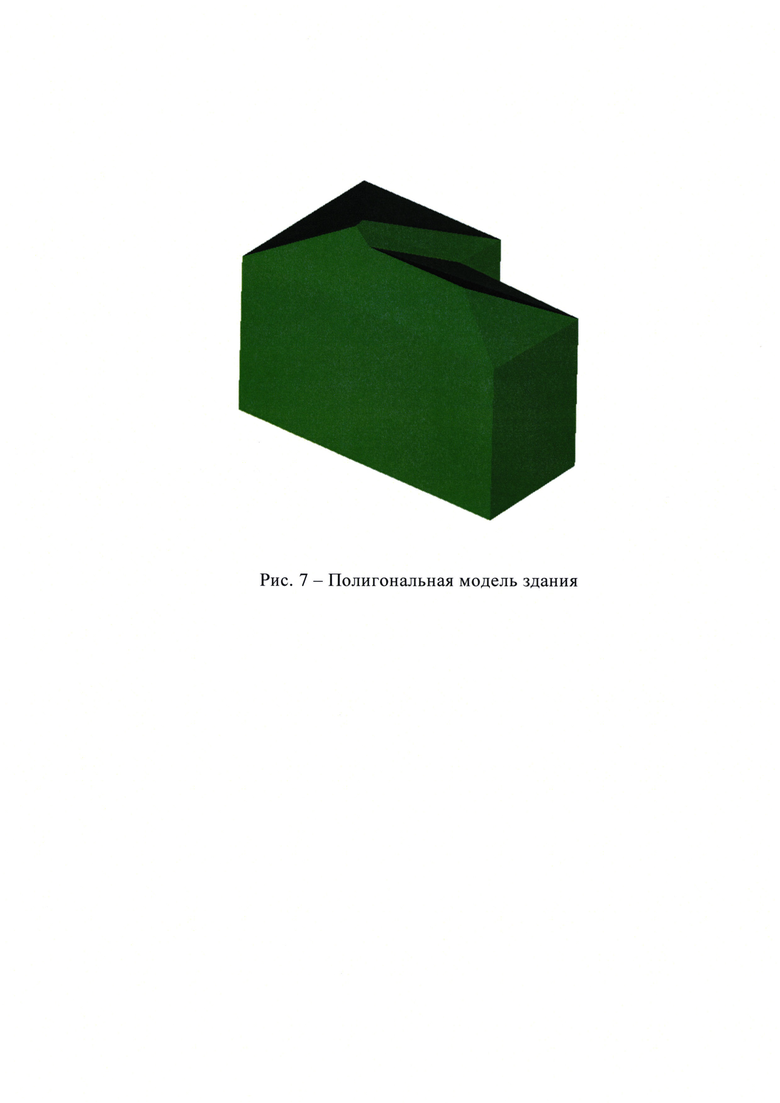
- рис. 4 - Замкнутый контур;
- рис. 5 - Плоскости трехмерной геометрии крыши;
- рис. 6 - Векторная модель здания;
- рис. 7 - Полигональная модель здания. Способ реализуется следующим образом.
В качестве исходных данных используется облако точек лазерных отражений объектов, полученное средствами воздушной лазерно-локационной съемки заданного участка местности. Данное облако представляет собой фактическую цифровую точечную трехмерную модель участка, включая все расположенные на нем объекты.
Следует отметить, что в настоящее время лазерно-локационная съемка является детальным и точным средством получения информации о местности.
По результатам воздушного лазерного сканирования вручную для каждого здания непосредственно на облаке точек выделяют область, визуально соответствующую крыше здания. Пример такой области приведен на рис. 1. При воздушной лазерной съемке сканер нацеливается преимущественно в надир, наиболее полно будет представлена информация о геометрии крыши здания. Точки, попавшие в выбранную область, помещаются в массив точек крыши. С этого этапа и далее весь процесс выполняется автоматически.
Основной задачей при построении моделей сооружений согласно заявленному способу является определение приближающих крышу здания параметров ребер и граней.
Для этого в первую очередь находят точки внешнего контура крыши. Пример такой области приведен на рис. 2. Для получения точек контура крыши массив точек крыши определяется альфа-форма - математическое обобщение понятия выпуклой оболочки. Параметр альфа, при этом, задается равным квадрату среднего расстояния между точками, но в конкретных случаях может варьироваться.
Для упорядочения точек контура крыши выбираются все регулярные ребра альфа-формы и упорядочиваются по смежным точкам, в результате чего формируется упорядоченный набор точек контура крыши.
Далее по точкам внешнего контура крыши формируют отрезки внешнего контура крыши, из которых формируется контур первого приближения, который приведен на рис. 3.
Для построения отрезков выбираются первые две точки из упорядоченного набора точек контура крыши, по ним определяется текущая линия. Если еще есть краевые точки, то выбирается следующая точка упорядоченного набора точек контура крыши. Текущая линия обновляется с помощью метода наименьших полных квадратов по своему набору точек вместе с новой точкой. Если максимальное отклонение всех точек линии не превышает максимального заданного отклонения, то новая точка добавляется к набору линии, и процесс попытки добавления новой точки повторяется. Если новая точка отбрасывается, то в контур первого приближения добавляется новый отрезок на текущей линии, концами которого становятся проекции на текущую линию первой и последней точек набора. Текущая линия становится предыдущей, набор точек текущей линии очищается и в него добавляется точка, отброшенная на предыдущем шаге. В качестве исходного направления текущей линии выбирается перпендикуляр к предыдущей линии. Попытка добавления новых точек осуществляется для новой текущей линии.
Когда контур первого приближения полностью сформирован, выполняется соединение отрезков контура первого приближения в замкнутый контур. Для этого соседние отрезки контура первого приближения продлеваются до пересечения друг с другом, точки пересечения становятся вершинами замкнутого контура. В случае, если соседние отрезки близки к параллельным, а расстояние между ними меньше среднего расстояния между точками массива точек крыши, то такие отрезки объединяются в один. По расстоянию до отрезков точек упорядоченного набора точек контура крыши определяется принадлежность точек к отрезкам контура первого приближения. Для каждого отрезка определяется число его точек, находящихся снаружи формируемого замкнутого контура, и отрезок смещается по направлению, ему перпендикулярном, так, чтобы три четверти принадлежащих ему точек контура первого приближения оказались внутри формируемого замкнутого контура. Смещенные отрезки продлеваются до пересечения с соседними. Слишком короткие отрезки (длина которых не больше среднего расстояния между точками) отбрасываются и заменяются на одну точку в своем центре. Результат формирования замкнутого контура представлен на рис. 4.
При этом, определяются плоскости трехмерной геометрии крыши. Для этого к массиву точек крыши применяется геометрический алгоритм «выращивания регионов». В результате каждая точка относится к определенной плоскости в трехмерном пространстве или помечается как неопределенная. Неопределенные точки отбрасываются. Результат определения плоскостей трехмерной геометрии крыши представлен на рис. 5.
Для полученного набора плоскостей определяются взаимные пересечения, которые принимаются как внутренние ребра крыши.
Следующим этапом определяют ребра края крыши. Для каждой плоскости определяется расстояние до замкнутого контура. Наиболее близкие к плоскости отрезки замкнутого контура проецируются на данную плоскость, формируя ребра края крыши.
По пересечению ребра края крыши с внутренними ребрами на определенной ранее плоскости определяется грань крыши. Соседние внешние грани крыши сравниваются между собой. Если точки их пересечения с внутренним ребром находятся на различном удалении от середины данного внутреннего ребра, то за положение истинного конца ребра края крыши принимается конец более удаленного от этой середины. При перемещении конца ребра края крыши второй конец также согласованно перемещается, чтобы оно осталось параллельно своему исходному положению. Данные дополнительные действия необходимы для согласования концов ребер края крыши между собой.
Далее формируют вертикальные грани стен здания, соединяющие ребра края крыши с горизонтальной плоскостью, расположенной на средней высоте рельефа в области расположения здания.
Если имеется цифровая модель рельефа, то высоту здания можно определить автоматически, определив среднюю высоту точек рельефа, находящихся под контуром крыши. Фактически, здание всегда стоит на плоском фундаменте, так что разброса между этими точками быть практически не должно. Если данных о рельефе нет, то высота здания может задаваться вручную.
До данного уровня выполняется достройка вертикальных граней здания от ребра края крыши, по одной грани на ребро.
По автоматически найденным параметрам ребер и граней формируется трехмерная векторная модель здания. Пример отображения такой модели приведен на рис. 6. Векторная модель в зависимости от целей моделирования может быть переведена в трехмерную полигональную модель здания, например в формате OFF. Пример трехмерной полигональной модели здания приведен на рис. 7.
Таким образом, технические результаты от использования изобретения заключаются в снижении влияния человеческого фактора при распознавании трехмерной формы здания по облаку точек. Предлагаемый способ предполагает наличие человеческого фактора только на этапе выделения области крыши здания на полученном с помощью сканера облаке точек. Причем, в предлагаемом способе роль ручных операций можно свести до уровня «просмотр результатов работы и ручное выделение области крыши для неверно обработанных ситуаций». По большей части, области крыш выделяются сегментированием фильтрованных по высоте над рельефом точкам.
Существенно ускорить процесс подготовки цифровых трехмерных карт позволяет автоматизация распознавания трехмерной формы крыш зданий и построения на их основе векторных и полигональных моделей зданий, а также использование в процессе построения трехмерной векторной модели в качестве исходных данных облака точек лазерного отражения без предварительной обработки сканированного изображения.
Кроме того, построение моделей сооружений на основании распознавания трехмерной формы крыш обеспечивает непревзойденную точность создаваемых моделей зданий, так как при воздушной лазерной съемке сканер нацеливается преимущественно в надир и наиболее полно будет представлена информация о геометрии крыши здания.
Заявителю неизвестны способы, представляющие совокупность всех признаков, характеризующих указанное изобретение, что говорит о «новизне» заявляемого объекта.
Заявляемые существенные признаки, предопределяющие получение указанных технических результатов, явным образом не следуют из уровня техники, что позволяет сделать вывод о соответствии заявляемого изобретения условию патентоспособности «изобретательский уровень».
Заявляемое техническое решение соответствует требованию «промышленная применимость», поскольку предназначено для построения картографических моделей местности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА РАСПОЗНАВАНИЯ ГОРОДСКИХ ОБЪЕКТОВ | 2015 |
|
RU2612571C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО ПОСТРОЕНИЯ ТРЕХМЕРНЫХ МОДЕЛЕЙ ГОРОДОВ | 2017 |
|
RU2638638C1 |
| Способ построения трехмерной векторной карты по цифровой модели и снимку местности | 2017 |
|
RU2680758C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО СОЗДАНИЯ ТРЕХМЕРНЫХ СИСТЕМ ГОРОДСКИХ ПАНОРАМ НА ОСНОВЕ ДАННЫХ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2601165C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНОГО РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА НА ЖЕЛЕЗНОДОРОЖНОМ ПУТИ | 2015 |
|
RU2579606C1 |
| Способ автоматического локального повышения точности данных воздушного лазерного сканирования с использованием данных наземного лазерного сканирования | 2019 |
|
RU2736506C1 |
| СПОСОБ ТРЁХМЕРНОГО (3D) КАРТОГРАФИРОВАНИЯ | 2014 |
|
RU2562368C1 |
| СПОСОБ ПОСТРОЕНИЯ КАРТЫ ЭКЗОГЕННЫХ ГЕОЛОГИЧЕСКИХ ПРОЦЕССОВ МЕСТНОСТИ ВДОЛЬ ТРАССЫ МАГИСТРАЛЬНОГО НЕФТЕПРОВОДА | 2015 |
|
RU2591875C1 |
| Фотограмметрический способ определения объема насыпи в закрытых складах | 2021 |
|
RU2788855C2 |
| Способ построения трехмерной модели местности вдоль полотна железнодорожного пути | 2020 |
|
RU2726256C1 |
Изобретение относится к области обработки и отображения пространственной информации и может быть использовано для построения картографических моделей местности на основе трехмерных цифровых моделей местности. Технический результат заключается в снижении временных затрат и повышении точности формирования векторных и полигональных моделей зданий по исходному облаку точек, а также снижении влияния человеческого фактора на качество получаемых моделей. Такой результат достигается за счет того, что средствами воздушной лазерной съемки формируется облако точек всех объектов заданного участка местности, выбирают область, визуально соответствующую крыше здания, а затем выполняется построение трехмерных объектов. Точки, попавшие в область, соответствующую крыше здания, помещаются в массив точек крыши. Затем формируют упорядоченный набор точек контура крыши. Далее по точкам внешнего контура крыши осуществляется построение отрезков границы крыши и формируется контур первого приближения, выполняется соединение отрезков контура первого приближения в замкнутый контур. Определяются плоскости трехмерной геометрии крыши, определяются внутренние ребра крыши, как взаимные пересечения полученного набора плоскостей трехмерной геометрии крыши, определяются ребра края крыши как пересечение полученного набора плоскостей трехмерной геометрии крыши с вертикальными плоскостями, проведенными через границу замкнутого контура. По пересечению ребер края крыши с внутренними ребрами на данной плоскости определяется грань крыши. Соседние внешние грани крыши сравниваются между собой, если точки их пересечения с внутренним ребром находятся на различном удалении от середины данного внутреннего ребра, то за положение истинного конца ребра края крыши принимается конец более удаленного от этой середины. Далее формируются вертикальные грани стен здания, соединяющие ребра края крыши с горизонтальной плоскостью, расположенной на средней высоте рельефа в области расположения здания. По найденным параметрам ребер и граней формируется векторная или полигональная модель здания. 2 з.п. ф-лы, 7 ил.
1. Способ создания векторных и полигональных моделей сооружений по данным лазерно-локационной съемки местности, при котором средствами воздушной лазерной съемки формируется облако точек всех объектов заданного участка местности, по полученному облаку точек для каждого здания вручную выбирают область, визуально соответствующую крыше здания, а затем выполняется построение трехмерных объектов, отличающийся тем, что для построения трехмерных объектов
точки, попавшие в область, соответствующую крыше здания, помещаются в массив точек крыши,
затем определяются точки внешнего контура крыши, определением альфа-формы, выбором всех регулярных ребер альфа-формы и упорядочиванием их по смежным точкам, в результате чего формируется упорядоченный набор точек контура крыши,
далее по точкам внешнего контура крыши методом наименьших полных квадратов осуществляется построение отрезков границы крыши и формируется контур первого приближения,
выполняется соединение отрезков контура первого приближения в замкнутый контур,
методом выращивания регионов определяются плоскости трехмерной геометрии крыши,
определяются внутренние ребра крыши как взаимные пересечения полученного набора плоскостей трехмерной геометрии крыши,
определяются ребра края крыши как пересечение полученного набора плоскостей трехмерной геометрии крыши с вертикальными плоскостями, проведенными через границу замкнутого контура,
по пересечению ребер края крыши с внутренними ребрами на данной плоскости определяется грань крыши,
соседние внешние грани крыши сравниваются между собой, если точки их пересечения с внутренним ребром находятся на различном удалении от середины данного внутреннего ребра, то за положение истинного конца ребра края крыши принимается конец более удаленного от этой середины,
далее формируются вертикальные грани стен здания, соединяющие ребра края крыши с горизонтальной плоскостью, расположенной на средней высоте рельефа в области расположения здания,
по найденным параметрам ребер и граней формируется векторная или полигональная модель здания.
2. Способ по п. 1, отличающийся тем, что для построения отрезков границы крыши и формирования контура первого приближения выбираются первые две точки из упорядоченного набора точек контура крыши, по которым определяется текущая линия, в случае, если еще есть краевые точки, то выбирается следующая точка упорядоченного набора точек контура крыши, и текущая линия обновляется методом наименьших полных квадратов по своему набору точек вместе с новой точкой, если максимальное отклонение всех точек линии не превышает максимального заданного отклонения, то новая точка добавляется к набору линии, и процесс попытки добавления новой точки повторяется, в противном случае новая точка отбрасывается, а в контур первого приближения добавляется новый отрезок на текущей линии, концами которого становятся проекции на текущую линию первой и последней точек набора, и текущая линия становится предыдущей, набор точек текущей линии очищается и в него добавляется точка, отброшенная на предыдущем шаге, в качестве исходного направления текущей линии выбирается перпендикуляр к предыдущей линии, и попытка добавления новых точек осуществляется для новой текущей линии.
3. Способ по п. 1, отличающийся тем, что для соединения отрезков контура первого приближения в замкнутый контур соседние отрезки продлеваются до пересечения друг с другом, точки пересечения становятся вершинами замкнутого контура, в случае, если соседние отрезки близки к параллельным, а расстояние между ними меньше среднего расстояния между точками массива точек крыши, то такие отрезки объединяются в один, по расстоянию до отрезков точек упорядоченного набора точек контура крыши определяется принадлежность точек к отрезкам контура первого приближения, для каждого отрезка определяется число его точек, находящихся снаружи формируемого замкнутого контура, и отрезок смещается по направлению, ему перпендикулярному, так, чтобы три четверти принадлежащих ему точек контура первого приближения оказались внутри формируемого замкнутого контура, смещенные отрезки продлеваются до пересечения с соседними, слишком короткие отрезки, длина которых не больше среднего расстояния между точками, отбрасываются и заменяются на одну точку в своем центре.
| Способ построения трехмерной векторной карты по цифровой модели и снимку местности | 2017 |
|
RU2680758C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО ПОСТРОЕНИЯ ТРЕХМЕРНЫХ МОДЕЛЕЙ ГОРОДОВ | 2017 |
|
RU2638638C1 |
| СПОСОБ И СИСТЕМА РАСПОЗНАВАНИЯ ГОРОДСКИХ ОБЪЕКТОВ | 2015 |
|
RU2612571C1 |
| RU 2019104791 A, 20.08.2020 | |||
| СПОСОБ АВТОМАТИЗИРОВАННОГО СОЗДАНИЯ ТРЕХМЕРНЫХ СИСТЕМ ГОРОДСКИХ ПАНОРАМ НА ОСНОВЕ ДАННЫХ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2601165C2 |
| CN 112489212 A, 12.03.2021 | |||
| CN 111815776 A, 23.10.2020 | |||
| CN 107025685 B, 17.03.2020. | |||

